SC+L1+Delcatillo+Miro+2+Enfoqques+RPD+2004qtec 36-02-154
15
Click here to load reader
-
Upload
nestor-chavez -
Category
Documents
-
view
212 -
download
0
Transcript of SC+L1+Delcatillo+Miro+2+Enfoqques+RPD+2004qtec 36-02-154

Two Approaches for Improving the Dual
Response Method in Robust
Parameter Design
GUILLERMO MIR�OO-QUESADA
Eli Lilly Bioprocess Research and Development, Lilly Technical Center-North, Indianapolis, IN 46221
ENRIQUE DEL CASTILLO
Penn State University, University Park, PA 16802
The prediction properties of models used in the dual response approach to robust parameter design are
studied, and two procedures that improve the performance of the approach are proposed. The first procedure
suggests scaling of the noise variables to reduce the expected mean squared error of the variance model, based
on the concept that the range of the noise variables used in the experimental design should contain most of
their distribution. Naturally, the scaling improves the fit of the part of the model associated with the noise
factors. However, it is shown that such scaling does not alter the variance contribution of the noise factors,
which is fundamental for robust parameter design. The second procedure combines the variance due to the
noise factors with the variance due to the prediction error of the fitted model (i.e., it looks at the variance of
the predictions), thus considering all sources of variability present in the problem. An unbiased estimator of
this combined variance is developed. Two examples are given for each procedure. The second proposed
approach is compared with the dual response approach recommended in the literature by means of the
prediction intervals of the responses, as recently discussed by Myers et al. (1997). It is found in the examples
that the new procedure gives narrower intervals (50% and 12% percent smaller) where the degree of
improvement depends, as expected, on the goodness of fit of the response surface model. The resulting
solutions thus obtained are robust to both noise factor and parameter estimation uncertainty. Negative
variance values, possible in the usual dual response approach in the literature, are avoided in the new
formulation.
KEY WORDS: Noise Factors; Process Optimization; Response Surface Methodology.
Introduction
ROBUST parameter design (RPD) has been success-fully used to improve the quality of products
since the mid eighties, particularly after the work byG. Taguchi in U.S. companies (Taguchi (1986,
1987)). The technique consists of determining the
levels of some set of controllable factors that reduces
the sensitivity of the process or product to variations
in another set of uncontrollable or noise factors, thus
increasing its robustness. It is assumed that the noise
factors can be controlled inside a laboratory environ-
ment but not during manufacturing. Good practice of
this approach suggests the use of an unbiased
estimator of the process variance as the objective
function, which is to be minimized with respect to the
controllable factors (e.g., see Myers and Montgomery
(2002, pp. 575–576)).
Dr. Mir�oo Quesada is a Senior Statistician at Eli Lilly & Co. His
email address is miroquesadada [email protected].
Dr. Del Castillo is an Associate Professor in the Department of
Industrial & Manufacturing Engineering. His email address is
Journal of Quality Technology Vol. 36, No. 2, April 2004154

Box and Jones (1990) and Myers (1991) proposedthe use of response surface models to explicitly modelthe variance and mean of a process or product as afunction of noise and controllable factors. One of theresponses is then optimized subject to constraints onthe second response. Constraints are also placed onthe controllable factors in order to avoid extrapola-tion of the models. This approach is known in theResponse Surface Methodology (RSM) literature asthe Dual Response approach (Khatree (1996), Lucas(1994), Myers, Khuri, and Vining (1992), Myers et al.(1997), Neff and Myers (1999), and Vining and Myers(1990)). For example, consider a manufacturer ofwafer stepper machines used in semiconductormanufacturing to align layers of circuits on wafers.A key quality characteristic of the process is theamount of light reflected from an alignment mark.The manufacturer of the machine wants to find outwhat settings of the alignment process, which areinternal to the stepper machine, minimize the impactof variations in process factors that its customer canchange while using the machine (such an applicationis described by Cantell et al. (1992)). A dual responseRPD formulation might involve minimizing thevariance of the reflected light subject to constraintsin the expected reflectance and on the range ofsettings of the alignment process.
Borkowski and Lucas (1997) and Borror andMontgomery (2000), among others, proposed experi-mental designs developed specifically for use with theDual Response approach. Borror et al. (2002)developed a methodology to evaluate the perfor-mance of an experimental design for use in an RPDstudy by using Variance Dispersion Graphs (Giovan-nitti-Jensen and Myers (1989), Myers, Vining,Giovannitti-Jensen, and Myers (1992), and Vining(1993)).
Our objective in this paper is to develop amethodology that takes into account the uncertaintydue not only to the noise factors but also due tomodel parameter estimation. Two approaches areproposed. The first attempts to reduce the uncer-tainty in the parameter estimates by properly scalingthe noise factors at the design stage. As is shown, thisscaling does not reduce the contribution to varianceof the noise factors (vital in RPD), and it also avoidsthe problem of obtaining negative variance values.The second approach uses an altogether differentobjective function for RPD, the estimated predictionvariance. This objective function is used in order toavoid solutions for which the estimated models havepoor predictive properties in favor of solutions for
which the expected behavior can be predicted withless uncertainty. The solutions obtained using suchan alternative objective function are not only robustwith respect to the uncertainty in the noise variables,but they are also robust with respect to the inherentuncertainty always present when estimating theparameters of a response surface model.
The remainder of this paper is organized as follows:the next section contains an analysis of the predictionproperties of the dual response approach proposed inthe RSM literature. In the third section, we developthe first approach, a scheme for appropriately scalingthe noise variables in order to reduce the expectedmean squared error of the variance model. This isillustrated by examples presented in the fourthsection. We then present the second approach, wherethe estimated prediction variance is used as theobjective. Two examples are given for each of theproposed approaches. Finally, the last section sum-marizes the work and we provide conclusions.
Estimation of The Process Variancein the Dual ResponseApproach to RPD
We suppose there are k controllable factors x0 =x1; x2; � � � ; xk½ � a n d r n o i s e v a r i a b l e s z0 ¼z1; z2; � � � ; zr½ �. Then, a model of the following formis usually recommended in the Dual Responseapproach:
Yiðxi; ziÞ ¼ �0 þ x0ibþ x0
iBxi þ z0igþ x0iDzi þ �i;
i ¼ 1; � � � ; n; ð1Þ
where
- Yiðxi; ziÞ is the value observed for the response inthe i experiment given a fixed value of the noisevariables, zi, and the corresponding values of thecontrollable factors xi;
- f�ig is a set of normal i.i.d. random variables withzero mean and variance �2
� ;
- and �0, b, B, g, and D are the model parameters.
One of the main advantages of the model inEquation (1) is the ease with which the mean andvariance for a new observation are obtained withrespect to the noise variables. These yield functions ofthe controllable factors x only:
EzðY ðx; zÞÞ ¼ �0 þ x0bþ x0Bx ð2Þ
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 155

VarzðY ðx; zÞÞ ¼ ðgþ D0xÞ0Szðgþ D0xÞ þ �2� : ð3Þ
When taking the mean and variance over the noisefactors, it is assumed that they have a mean equal tozero and a covariance matrix represented by Sz. Theassumption of zero mean can be met easily by usingan appropriate coding convention, as is shown in thethird section. We assume that Sz is known, followingcommon practice in the RPD literature (Neff andMyers (1990), Myers and Montgomery (2002), andMyers, Kim, and Griffiths (1997)). Although inprinciple historical data can be used to estimate Sz,the possibility of errors in this estimate indicates theneed for further research on this aspect of theproblem, which is outside the scope of the presentpaper.
In practice, all the parameters in Equation (1) areestimated from data. Since the estimation is per-formed under this model, which is linear in all itsparameters, and the �i are i.i.d., all the usualassumptions of linear regression are met (Neter etal. (1996, p. 221)). Therefore, ordinary least squares(OLS) estimators of these parameters are the bestunbiased estimators (see Arnold (1990, p. 68)). Itshould be pointed out that the constant varianceassumption for the �i implies that any non-constancyof variance of the process stems from an inability tocontrol the noise variables. Whenever this assump-tion is not valid, estimators can be found usinggeneralized least squares.
To estimate �0, b, B, g, and D, the model inEquation (1) can be re-parameterized in the followingway (Borror et al. (2002)):
y ¼ X�b� þ e; ð4Þ
where y is a vector containing all the observationsYiðxi; ziÞ, X� is a matrix containing ½ðkþ 1Þðkþ 2Þ=2� þ krþ r columns representing the linear effects,second order interactions and quadratic effects forthe controllable factors, the r linear effects for thenoise variables, and kr interactions between the noiseand the controllable factors. It is helpful to collect allthe terms associated with controllable factors and theintercept in one vector in the following way:
xðmÞ ¼ 1 x1 x2 . . . xk x1x2 x1x3 . . .½xkxk�1 x2
1 x22 . . . x2
k
�:
The vector b� contains all the parameters present inEquation (1), �0, b, B, �, and D.
The least squares estimator of b� is given by
bbb� ¼ X�0X�� ��1
X�0y :
We denote by bYY ðx; zÞ a prediction based on the fittedmodel in Equation (1) when both x and z are fixedand specified.
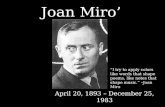
The symmetric matrix X�0X�� ��1, depicted in
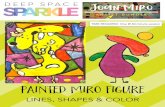
Figure 1, is the scaled covariance matrix of bbb� andis made up of several submatrices relevant to ourdiscussion. We also need to further partition CðzxÞinto submatrices corresponding to each controllablefactor xi, i ¼ 1; � � � ; k. This partition is presented inFigure 2.
To estimate EzðY ðx; zÞÞ and VarzðY ðx; zÞÞ, it isusually recommended to simply substitute for theparameters in Equations (2) and (3) their respectiveOLS estimators, b��0, bbb, bBB, bgg, and bDD, to obtain
bEEzðY ðx; zÞÞ ¼ b��0 þ x0bbbþ x0 bBBx ð5Þ
and
dVarVarðbÞz ðY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ þ b��2� : ð6Þ
The estimator in Equation (5) is an unbiasedestimator of EzðY ðx; zÞÞ. However, the estimator inEquation (6) is not an unbiased estimator ofVarzðY ðx; zÞÞ, because it is a quadratic function ofbgg and bDD, and, hence, the ‘‘ðbÞ’’ superscript. To showthis, we can take the expectation of the quadraticform in Equation (6) over the parameter estimates bggand bDD to obtain (see, for example, Arnold (1981,p. 205))
FIGURE 1. The Structure of the Covariance Matrix of bbb�.Journal of Quality Technology Vol. 36, No. 2, April 2004
156 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

Ebgg;bDD dVarVarðbÞz ðY ðx; zÞÞ� �
¼ Ebgg;bDD ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ þ b��2�
� �¼ ðgþ D0xÞ0Szðgþ D0xÞ ð7Þ
þ trace SzVarbgg;bDD bggþ bDD0x� �� �
þ �2�
¼ ðgþ D0xÞ0Szðgþ D0xÞ þ trace SzPð Þ þ �2� ;
where P is obtained by partitioning bDD column-wiseand assuming an orthogonal experimental design. SeeMyers and Montgomery (2002, p. 576) for details.
An unbiased estimator for VarzðY ðx; zÞÞ can befound by correcting for the term with the trace inEquation (7) in the following way:
dVarVarzðY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞþ b��2
� 1� traceðSzPÞð Þ : ð8Þ
This expression is the one recommended by Myersand Montgomery (2002, p. 576) as an unbiasedestimator for VarzðY ðx; zÞÞ. An equivalent, but morerevealing, expression for P can be found by partition-ing bDD row-wise instead of column-wise:
P ¼ Varbgg;bDD bggþ bdd 01�bdd 02� � � � bdd 0
k�
h ix
� �=�2
�
¼ Var bggþXki¼1
xibdd 0
i�
!=�2
� ;
where each bdd 0i� is r� 1.
Assuming, as before, that an orthogonal design isused and noting that the scaled covariance matricesof bgg and bddi� are given, respectively, by Cz and CðzxÞii(see Figure 1 for Cz and Figure 2 for the CðzxÞii), weobtain
P ¼ Cz þXki¼1
x2iCðzxÞii ;
where a scaled covariance matrix means a covariancematrix that is divided by �2
� .
Most of the response surface experimental designs,especially the mixed resolution type that has beenrecommended for use in the dual response approachto RPD, render all the estimates for the noise-�control interactions with the same standard error(Borror and Montgomery (2000), Borkowski andLucas (1997), Myers and Montgomery (2002), andShoemaker et al. (1991)). We assume that this is thecase, so all the bddi� have the same covariance matrix.Therefore, we let Cd ¼ CðzxÞii , i ¼ 1; . . . ; k, repre-sent this common covariance matrix. Then, we have
P ¼ Cz þ ðx0xÞCd :
With this, an alternative expression of the unbiasedestimator of the variance can be found bydVarVarzðY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ
þ b��2� 1� trace SzCzð Þ þ x0xð ÞtraceðSzCdÞ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
Bias correction term
0B@1CA
0B@1CA:
ð9Þ
The unbiased estimator in Equation (9) explicitlystates how the ‘‘bias correction term’’ increases withthe squared distance from the origin in coded units(x0x). Thus, for settings of the controllable factors faraway from the origin, the variance estimate inEquation (9) can be negative. As discussed in thethird section, this is not the only possible cause of anegative variance estimate. Some recommendationson how to avoid this situation are offered in the nextsection. Equation (9) can be used as an objectivefunction for RPD purposes. In the fourth section, thisfunction is compared to a new proposed objectivefunction that avoids the problem of negative varianceestimates altogether.
Prediction Properties of theVariance Model and Scaling of the
Noise Factors
In this section, we show how the predictionproperties of the estimated model for the variance(Equation 10) can be improved by looking at thescaling factor used in the coding convention followedfor the noise variables in the experimental design. Wealso show how this scaling has no effect on thevariance transmitted by the noise. Taking the
FIGURE 2. The Structure of CðzxÞ.
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 157

variance operator on Equation (1) implies performingthe following operation:
VarzðY ðx; zÞÞ ¼ Ez ðY ðx; zÞ � EzðY ðx; zÞÞÞ2h i
:
ð10Þ
In practice, neither Y ðx; zÞ nor EzðY ðx; zÞÞÞ isknown, and they have to be approximated bybYY ðx; zÞ and bEEzðY ðx; zÞÞ, respectively. With theseapproximations, we obtain
Varz bYY ðx; zÞ� �
¼ Ez ð bYY ðx; zÞ � bEEzðY ðx; zÞÞÞ2h i
¼ Ez z0bggþ x0bDDz� �2 : ð11Þ
This follows, since from Equations (1) and (2)
bYY ðx; zÞ � bEEzðY ðx; zÞÞ ¼ z0bggþ x0bDDz: ð12Þ
However, since the expectation in Equation (11) isonly taken over the noise variables, Varz bYY ðx; zÞ
� �does not take into account the variability of theparameter estimates in bgg0zþ x0bDDz; it only accountsfor the variability in the noise factors themselves. InAppendix A it is shown that
EzðMSEðz0bggþ x0bDDzÞ=�2� Þ ð13Þ
¼ trace SzCzð Þ þ x0xð ÞtraceðSzCdÞ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}Bias correction term
;
where MSE denotes the Mean Squared Error incurreddue to uncertainty in the parameter estimates.Therefore, it is seen that the bias correction term isa measure of the expected squared error made whenusing estimates in Equation (10). Hence this error issubtracted in Equation (9) to obtain an unbiasedestimator of the variance of the response.
In general, the user might be interested not only incorrecting by the expected or average error, as is donein Equations (8) and (9), but also in making this erroras small as possible. Therefore, it is a good practice toreduce as much as possible this bias correction term.The following measures can be taken to reduce it:
1. Have a good experimental design that efficientlyestimates g and D, so that, for the same Sz,traceðSzCzÞ and traceðSzCdÞ are small.
2. Avoid settings of the controllable factors faraway from the origin to avoid large values of x0x.
3. Have a good fit of the linear regression model inEquation (4) to obtain a small estimate of �2
� .
4. Have a small covariance matrix of the noisevariables, Sz.
Since the quality of the fit cannot be guaranteedbefore performing the experiments and any value ofthe controllable factors inside their experimentalregions should be allowed, the only options we haveavailable at the design stage are 1 and 4 above. TheCz and Cd matrices are usually fixed from theexperimental design. This in turn depends on otherconstraints like the budget for experiments, allowablealias structure, etc. Suitable tools are available toeffectively assess the performance of experimentaldesigns for robustness studies, like the variancedispersion graphs suggested by Borror et al. (2002).Alternatively, the covariance matrix of the noisevariables, Sz, can be easily controlled by adequatelyscaling the �1 levels of the noise variables in theexperimental design.
To ease the calculations, we assume that all noisevariables are to be scaled by the same multiple oftheir respective standard deviations. We let �i denotethe un-coded version of the noise variable zi, with ��i
and ��i denoting the mean and standard deviation,respectively. We use the following coding convention,
zi ¼�i � ��i
c��i
; i ¼ 1; � � � ; r;
where c is the scaling factor we seek. Then,
EðziÞ ¼��i � ��i
c��i
¼ 0; VarðziÞ ¼�2�i
c2�2�i
¼ 1
c2;
or, in vector notation,
EðzÞ ¼ 0; VarðzÞ ¼ Sz ¼1
c2Wy;
where Wy is the correlation matrix of the noisevariables. Hence, we observe that we have controlover Sz through the scaling factor c.
We propose considering the following relationship,while setting �1 levels for the noise variables:
1
c2traceðWyCzÞ þ ðr2mÞtraceðWyCdÞ� �
¼ �; ð14Þ
where rm is distance from the center of the designspace to the farthest point in the experimental region
Journal of Quality Technology Vol. 36, No. 2, April 2004
158 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

for the controllable factors. The interpretation of the� parameter, which needs to be defined by the user tosolve for c in Equation (14), can be better understoodby considering the case when � ¼ 1. In such a case,from Equations (12) and (13) we have thatEzðMSEðz0bggþ x0bDDzÞ=�2
� Þ ¼ �2� . This means that the
average variance of bYY ðx; zÞ � bEEzðY ðx; zÞÞ equals theresidual error variance. Ideally, we would like to have� ! 0, since this makes the average variance of thatpart of the fitted model tend to zero. Clearly, this canonly be achieved when c ! ‘. This result agrees withthe common-sense notion that spreading the factorlevels improves the properties of a fitted model.
What makes the use of Equation (14) useful indetermining noise factor levels in an RPD problem isthe following additional result. We consider the firstterm on the right of Equation (9). This can bethought of as the variance contribution of the noisevariables. In Appendix B we show how this variancecomponent is invariant with respect to changes in thescale parameter c. Therefore, by appropriatelyscaling the noise variables, only the bias correctionterm decreases by c2, while the variance contributionof the noise factors does not change. This means thatwhile the prediction properties of the fitted model arebeing improved, the variance transmitted by thenoise factors, a key aspect of any RPD study, remainsthe same.
In practice, we suggest keeping � small, perhaps inthe range (0.1, 0.3), to avoid unrealistically extremenoise factor levels and to keep, at the same time, alow value for the expected MSE in Equation (13). Inthe examples in the next section, a value of � ¼ 0:1 isused for illustration purposes.
Examples: Determining the Levelsof the Noise Factors
In this section, we illustrate the use of Equation(14) in setting the scaling factor c for determining thelevels of the noise factors. After the two examples, weoffer some additional remarks on choosing � and c inEquation (14). We hasten to point out that theresulting noise factor levels are simply suggestionsand not necessary conditions that should be ‘‘en-forced.’’
Example 1
We suppose the design in Table 1 is to be used for arobustness study with four controllable factors andthree noise variables (the responses Y are used later).This is a mixed resolution design proposed by
Borkowski and Lucas (1997). It has resolution Vamong the controllable factors and resolution IIIamong the noise factors. Hence, all second orderinteractions among the controllable factors areestimable, but the second order interactions betweenthe noise factors are aliased with each other. It can beobserved that for this design, r2m ¼ 2:652 ¼ 7.
The design in Table 1 is orthogonal, and itestimates all the elements in g and in D with thesame standard error. Therefore, CðzxÞii ¼ Cd,i ¼ 1; � � � ; k. Furthermore, for this design, Cd andCz are equal and given by
Cz ¼ Cd ¼1
32
1 0 00 1 00 0 1
24 35:For this example we set � to 0.1. Then, we have
1
c2traceðWyCzÞ þ ðr2mÞtraceðWyCdÞ� �
¼ 0:1
or
1
c21
32traceðWyÞ þ
7
32traceðWyÞ
� �¼ 0:1 :
Since Wy is the correlation matrix, the diagonalelements are all equal to 1, and we havetraceðWyÞ ¼ 3. Solving for c, we obtain
c ¼ffiffiffiffiffiffiffi7:5
p¼ 2:74:
Example 2
In this example we analyze a standard Box-Behnken design for five factors given in Table 2.This experimental design was constructed usingMINITAB 13.1. Myers and Montgomery (2002) gavea detailed description of how to construct Box-Behnken designs. We divide these five factors intothree controllable and two noise factors. The design isresolution V among all the factors. The scaledcovariance matrices of the parameter estimatesassociated with noise factors are
Cz ¼1
16
1 00 1
and Cd ¼
1
4
1 00 1
:
In this experiment all the points, except for the centerpoints, are at a squared distance of r2m ¼ 2. Then, wehave
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 159

TABLE 1. Mixed Resolution Design for Example 1
x1 x2 x3 x4 z1 z2 z3 Y
1 1 1 1 1 1 1 411�1 1 1 1 1 �1 �1 2691 �1 1 1 1 �1 �1 106
�1 �1 1 1 1 1 1 1591 1 �1 1 1 �1 �1 258
�1 1 �1 1 1 1 1 2571 �1 �1 1 1 1 1 216
�1 �1 �1 1 1 �1 �1 971 1 1 �1 1 1 �1 312
�1 1 1 �1 1 �1 1 1501 �1 1 �1 1 �1 1 253
�1 �1 1 �1 1 1 �1 1111 1 �1 �1 1 �1 1 56
�1 1 �1 �1 1 1 �1 351 �1 �1 �1 1 1 �1 204
�1 �1 �1 �1 1 �1 1 �471 1 1 1 �1 �1 1 175
�1 1 1 1 �1 1 �1 1691 �1 1 1 �1 1 �1 152
�1 �1 1 1 �1 �1 1 1631 1 �1 1 �1 1 �1 143
�1 1 �1 1 �1 �1 1 2221 �1 �1 1 �1 �1 1 180
�1 �1 �1 1 �1 1 �1 1361 1 1 �1 �1 �1 �1 109
�1 1 1 �1 �1 1 1 1881 �1 1 �1 �1 1 1 174
�1 �1 1 �1 �1 �1 �1 1641 1 �1 �1 �1 1 1 85
�1 1 �1 �1 �1 �1 �1 1591 �1 �1 �1 �1 �1 �1 154
�1 �1 �1 �1 �1 1 1 672.65 0 0 0 0 0 0 17
�2.65 0 0 0 0 0 0 �540 2.65 0 0 0 0 0 3980 �2.65 0 0 0 0 0 1940 0 2.65 0 0 0 0 3700 0 �2.65 0 0 0 0 2370 0 0 2.65 0 0 0 3790 0 0 �2.65 0 0 0 2550 0 0 0 0 0 0 890 0 0 0 0 0 0 90 0 0 0 0 0 0 69
Journal of Quality Technology Vol. 36, No. 2, April 2004
160 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

traceðWyCzÞ þ ðr2mÞtraceðWyCdÞ� �
¼ 0:1
or
1
16c2traceðWyÞ þ
2
4c2traceðWyÞ ¼ 0:1;
and solving for c we obtain
c ¼ffiffiffiffiffiffiffiffiffiffiffi11:25
p¼ 3:35:
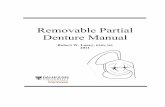
In general, the user or experimenter can considerother criteria for setting the �1 levels of the noisefactors in coded units. Therefore, a less restrictiveapproach might be to make plots of � vs. c like theones shown in Figure 3. This figure contains curvesshowing how � changes with the scale parameter c forboth of the preceding examples. They can be used toassess the magnitude of the bias correction factor,which, as shown before, is a measure of the meansquared error of the predicted variances for a givenvalue of c. In addition, from Equation (14) it is clearthat the functional relationship between c and � is ofthe form � ¼ a=c2, where a is a constant whose valuedepends on r2m, Wy, Cz, and Cd. Hence, the generalform of the curves observed in Figure 3 is similar tothat of other designs. The form of the curves impliesthat, for small values of c, large reductions in � can betraded for small increases in c; however, for largevalues of c, further improving � requires largeincreases in c. Actually, the slope of the curves equals�1 (the tangent has an angle of 45 degrees) atc ¼
ffiffiffiffiffi2a3
p.
If c ¼ 1 for the two Box-Behnken designs, thenthere is a possibility of having a negative value ofdVarVarðY ðx; zÞÞ because the bias correction factor islarger than 1. It is interesting to highlight that theBox-Behnken designs perform worse than the mixedresolution design in spite of having a higher resolu-tion among the noise factors and more experimentalruns with a smaller number of controllable and noisefactors. Actually, if a Box-Behnken design with sevenfactors (4 controllable and 3 noise, the same numberas in the mixed resolution experiment of example 1) isused, then to achieve � ¼ 0:1, a larger scalingparameter of c ¼ 3:54 is needed. A plot of � vs. cfor this design is also included in Figure 3.
TABLE 2. Box-Behnken Design for Example 2
x1 x2 x3 z1 z2
�1 �1 0 0 01 �1 0 0 0
�1 1 0 0 01 1 0 0 00 0 �1 �1 00 0 1 �1 00 0 �1 1 00 0 1 1 00 �1 0 0 �10 1 0 0 �10 �1 0 0 10 1 0 0 1
�1 0 �1 0 01 0 �1 0 0
�1 0 1 0 01 0 1 0 00 0 0 �1 �10 0 0 1 �10 0 0 �1 10 0 0 1 10 �1 �1 0 00 1 �1 0 00 �1 1 0 00 1 1 0 0
�1 0 0 �1 01 0 0 �1 0
�1 0 0 1 01 0 0 1 00 0 �1 0 �10 0 1 0 �10 0 �1 0 10 0 1 0 1
�1 0 0 0 �11 0 0 0 �1
�1 0 0 0 11 0 0 0 10 �1 0 �1 00 1 0 �1 00 �1 0 1 00 1 0 1 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 0
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 161

Using the Prediction Variancein the Dual Response Approach to the
RPD Problem
If Varzð bYY ðx; zÞÞ is minimized in a RPD problem,we focus only on the variance over the noise factordistribution. However, an additional variance com-ponent in RPD is due to the uncertainty in theparameter estimates. As shown earlier, impreciseestimates of the parameters associated with noisefactors can result in negative values of Varzð bYY ðx; zÞÞ.Therefore, a natural extension of the current dualresponse approach for RPD is to introduce thisadditional variance into the objective function thatcombines noise factor variance with variability of theparameter estimates. Optimizing such a functionleads to a process that is robust with respect to noisefactor variation and with respect to uncertainty inthe parameter estimates.
One such function is the variance of the predictedresponse, where the variance is taken with respect tothe parameter estimates of the model and withrespect to the noise factors. As in the second section,we let bbb� denote the vector containing all theparameters in the model of Equation (1). We proposeconsidering the objective
Varz;bbb� ð bYY ðx; zÞÞ ¼ Var
z;bbb� b�0�0 þ x0bbbþ x0 bBBx�
þ z0bggþ x0bDDz�;which is the variance of the predicted response taking
into consideration the variability in the noise factorsand in the parameter estimates.
Assuming an orthogonal design and independencebetween the noise factors and the parameter esti-mates, which is equivalent to assuming independencebetween the noise factors and the �i of Equation (1),we have
Varz;bbb� ð bYY ðx; zÞÞ ¼ Var
z;bbb� b�0�0 þ x0bbbþ x0 bBBx� �
þVarz;bbb� z0bggþ x0bDDz� �
: ð15Þ
We let xðmÞ represent the ½ðkþ 1Þðkþ 2Þ�=2 vectorcontaining the regressors associated with the con-trollable factors. Then, since the argument of thevariance operator in the first term of Equation (15) isnot a function of z, this term is given by
Varz;bbb� b�0�0 þ x0bbbþ x0 bBBx� �
¼ �2�x
ðmÞ0CxðmÞxðmÞ;
ð16Þ
where CxðmÞ is the upper left matrix of x�0x�� ��1, as
shown in Figure 1.
The second term of Equation (15) can be foundusing the law of conditional variance (see, e.g.,Arnold (1990, p. 128)):
Varz;bbb� z0bggþ x0bDDz� �
¼ Ez Varbbb� z0bggþ x0bDDz� �jz
� �þVarz Ebbb� z0bggþ x0bDDz� �
jz� �
¼ Ez �2�z
0Pz� �
þVarz z0gþ x0Dzð Þ¼ �2
� traceðSzPÞþ ðgþ D0xÞ0Szðgþ D0xÞ;
ð17Þ
where the matrix P was defined earlier. Engel andHuele (1996) also used the law of conditional varianceto simultaneously take into account two sources ofvariability in an RPD setting.
Therefore, by combining Equations (16) and (17),we obtain
Varz;bbb� ð bYY ðx; zÞÞ ¼ ðgþ D0xÞ0Szðgþ D0xÞ
þ �2� traceðSzPÞ þ xðmÞ0CxðmÞxðmÞ� �
:
ð18Þ
FIGURE 3. Value of � as a Function of the Scale Factor c
for Examples 1 and 2.
Journal of Quality Technology Vol. 36, No. 2, April 2004
162 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

From Equation (7) we have
Ebgg;bDD ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ� �¼ ðgþ D0xÞ0Szðgþ D0xÞ þ �2
� trace SzPð Þ;
and therefore an unbiased estimator of Equation (18)is given by
dVarVarz;bbb� ð bYY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ
þ b��2� ðxðmÞ0CxðmÞxðmÞÞ; ð19Þ
which is the function we propose minimizing to solvethe dual response problem. That is, we proposeminimizing the estimated variance of the predictions.As indicated by the subscripts, Equation (19)considers the variability created both by the random-ness of the noise factors and by the uncertainty in theparameter estimates of the fitted model.
We note that to get an unbiased estimator we donot need to subtract the bias correction term as wedid earlier, because Equation (18) contains the termtraceðSzPÞ. Since in Equation (19) nothing is beingsubtracted, no negative estimates of the combinedvariance occurs.
Example 3
Borror and Montgomery (2000) analyzed the dataset presented in Table 1. The fitted response surfacehas an R2 statistic of 0.945, which implies a relativelygood fit.
As determined earlier, the suggested scaling para-meter for this design is c ¼ 2:74. Therefore, thecovariance matrix for the noise factors is
Sz ¼1
7:5
1 0 00 1 00 0 1
24 35:In this example, we compare the proposed combinedobjective (estimated prediction variance, dVarVarz;bbb�ð bYY ðx; zÞÞ) computed using Equation (19) with thebiased estimator dVarVarðbÞz ðY ðx; zÞÞ from Equation (6)and with dVarVarzðY ðx; zÞÞ from Equation (9). Theseobjectives are minimized subject to bEEzðY ðx; zÞÞ ¼200 and x0x � r2m ¼ 7 using Matlab’s fmincon rou-tine. This routine uses a sequential quadraticprogramming algorithm, although, given the smallnumber of decision variables, any general purpose,non-linear programming technique can be utilized,such as the Generalized Reduced Gradient (GRG)included in MS Excel’s Solver.
The optimal solutions for the three constrainedminimization problems are presented in Table 3. Thecolumn under x� contains the optimal settings of thecontrollable factors for the respective objective. Thevalue of the objectives evaluated at their respectivex� are listed under ‘‘Optimal Value.’’ The values ofthe other objective functions for each optimalsolution are also included. Here, b�� bEEzðY Þ representsthe estimated standard error with which theestimated expected mean of bEEzðY ðx; zÞÞ ¼ 200is predicted. These values correspond tob���
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffix0ðmÞ�CxðmÞxðmÞ�
p, where xðmÞ� denotes the opti-
mal settings x� transformed to model form. The95% prediction intervals are calculated using themethodology developed by Myers, Kim, and Grif-fiths (1997), taking into account the variability dueto the noise factors and the prediction error, andthus allowing the experimenter to be 95% certainthat a future response value at the specified locationx� is covered by the prediction interval.
The optimal value of dVarVarðbÞz ðY ðx; zÞÞ is zerobecause there are more controllable factors thannoise factors, and ðbggþ bDD0x�Þ0Szðbggþ bDD0x�Þ can bemade zero by setting x� so that bDD0x� ¼ �bgg.A region containing all such values that also satisfiesx0x � 7 is given in the corresponding cell of Table 3.For this objective, no values are given for b��EzðY Þ and95% PI because they depend on which value of x� isused.
It can be seen that the predicted mean at thesolution obtained with the proposed objective hashalf the standard error of that obtained withdVarVarzðY ðx; zÞÞ. Of course, the standard error for thepredicted mean does not depend on the variabilityintroduced by the noise factors, and thus it isexpected to be smaller for the proposed objective.However, the prediction interval evaluated at thesolutions obtained using the proposed objective,which does take into account the variability due tothe noise factors, has 49% of the width of theprediction interval obtained at the solution fordVarVarzðY ðx; zÞÞ.
Due to the large number of controllable factors,this example allows for almost completely eliminatingthe variance contribution of the noise factors.However, since the fit is moderately good, the newobjective allows us to find solutions for which thevariance contribution due to the noise factors is stillsmall but the predictive properties of the fittedmodels are much better. Thus, we have obtained a
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 163

solution that is robust to both noise factor variabilityand uncertainty in the model parameter estimates.
Example 4
Myers and Montgomery (2002) presented theresults from an experiment run in a semiconductormanufacturing facility. There are 2 controllable
factors and three noise factors. The combined arraydesign used is shown in Table 4.
By using the methodology of the third section withr2m ¼ 4 and � ¼ 0:1, we obtain the scaling parameterc ¼ 3:0618. Therefore, the covariance matrix of thenoise factors is
Sz ¼1
9:375
1 0 00 1 00 0 1
24 35 :
The fitted response surface is given by
bYY ðx; zÞ ¼ 30:37� 2:9x1 � 4:13x2
þ 2:60x21 þ 2:18x2
2 þ 2:87x1x2
þ 2:73z1 � 2:33z2 þ 2:33z3
þ 0:27x1z1 þ 0:89x1z2 þ 2:58x1z3
þ 2:01x2z1 � 1:43x2z2 þ 1:56x2z3;
which has an R2 statistic of 0.995, hence the modelfits the data very well. The estimate of the residualvariance, b��2
� , is 0.9536. The mean model is given by
bEEzðY ðx; zÞÞ ¼ b��0 þ x0bbbþ x0 bBBx
¼ 30:37� 2:9x1 � 4:13x2 þ 2:60x21
þ 2:18x22 þ 2:87x1x2 :
In this example, we also compare the three objectivesof example 3. The models for these three objectivesare given by
TABLE 3. Optimal Solutions Obtained Using dVarVarðbÞz ðY ðx; zÞÞ, dVarVarzðY ðx; zÞÞ and dVarVarz;bbb� ð bYY ðx; zÞÞ for Example 3
ObjectiveFunction x� dVarVarðbÞz ðY ðx�; zÞÞ dVarVarzðY ðx�; zÞÞ dVarVar
z;bbb� ð bYY ðx�; zÞÞ b�� bEEzðY Þx1 ¼ �0:73þ 1:01x4dVarVarðbÞz ðY ðx; zÞÞ x2 ¼ 0:59� 0:47x4 0 1710 1018 ��x3 ¼ �0:22� 1:96x4
x4 2 ½�0:90 ; 1:10�dVarVarzðY ðx; zÞÞy [�1:86; 1:18; 1:29; �0:70] 1874 1687 1478 38.4dVarVarz;bbb� ð bYY ðx; zÞÞyy [ 0:18; 0:46; �1:28; 0:96] 1890 1801 370 18.6
y 95% Prediction Interval for Y: 200� 79:5yy 95% Prediction Interval for Y: 200� 38:9
TABLE 4. Combined Array for Example 4
x1 x2 x3 z1 z2 Y
�1 �1 �1 �1 1 44.21 �1 �1 �1 �1 30.0
�1 1 �1 �1 �1 30.01 1 �1 �1 1 35.4
�1 �1 1 �1 �1 49.81 �1 1 �1 1 36.3
�1 1 1 �1 1 41.31 1 1 �1 �1 31.4
�1 �1 �1 1 �1 43.51 �1 �1 1 1 36.1
�1 1 �1 1 1 22.71 1 �1 1 �1 16.0
�1 �1 1 1 1 43.21 �1 1 1 �1 30.3
�1 1 1 1 �1 30.11 1 1 1 1 39.2
�2 0 0 0 0 46.12 0 0 0 0 36.10 �2 0 0 0 47.40 2 0 0 0 31.50 0 0 0 0 30.80 0 0 0 0 30.70 0 0 0 0 31.0
Journal of Quality Technology Vol. 36, No. 2, April 2004
164 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

dVarVarðbÞz ðY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ þ b��2�
¼ 2:91þ 0:683x1 þ 2:655x2
þ 0:804x21 þ 0:906x2
2 þ 0:470x1x2 ;
dVarVarzðY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ
þ b��2�
�1� trace SzCzð Þ
� x0xð ÞtraceðSzCdÞ�
¼ 2:89þ 0:683x1 þ 2:655x2
þ 0:785x21 þ 0:887x2
2 þ 0:470x1x2 ;
dVarVarz;bbb� ð bYY ðx; zÞÞ ¼ ðbggþ bDD0xÞ0Szðbggþ bDD0xÞ
þ b��2� x0ðmÞCxðmÞxðmÞ� �
¼ 2:15þ 0:683x1 þ 2:655x2
þ 0:700x21 þ 0:803x2
2 þ 0:470x1x2
þ 0:098x21x
22 þ 0:0492x4
1
þ 0:0492x42 :
The minimizations of each of these objectives,subject to bEEzðY ðx; zÞÞ ¼ 50 and x0x � 4, are alsoperformed using Matlab’s fmincon routine. Table 5contains the optimal solutions. The value of the otherobjective functions at the optimal solutions are alsogiven. In this case, there are only two controllablefactors; therefore, we can construct contour plots of
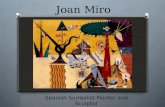
some relevant surfaces. Figure 4 contains contour
plots for dVarVarzðY ðx; zÞÞ and dVarVarz;bbb� ð bYY ðx; zÞÞ together
TABLE 5. Optimal Solutions Obtained Using dVarVarðbÞz ðY ðx; zÞÞ, dVarVarzðY ðx; zÞÞ and dVarVarz;bbb� ð bYY ðx; zÞÞ for Example 4
ObjectiveFunction x� dVarVarðbÞz ðY ðx�; zÞÞ dVarVarzðY ðx�; zÞÞ dVarVar
z;bbb� ð bYY ðx�; zÞÞ b��bEEzðY ÞdVarVarðbÞz ðY ðx; zÞÞy ½�0:35;�1:95� 1.36 1.26 0.95 0.74dVarVarzðY ðx; zÞÞyy ½�0:32;�1:97� 1.36 1.26 0.96 0.75dVarVarz;bbb� ð bYY ðx; zÞÞyyy ½�0:58;�1:77� 1.40 1.32 0.87 0.65
y 95% Prediction Interval: 50� 1:16yy 95% Prediction Interval: 50� 1:17yyy 95% Prediction Interval: 50� 1:05
F IGURE 4 . C o n t o u r P l o t s o f dVarVarzðY ðx; zÞÞ,dVarVarz;bbb� ð bYY ðx; zÞÞ and bEEzðY ðx; zÞÞ ¼ 50, Example 4. The
‘‘x’’ Marks the Optimal Settings for dVarVarzðY ðx; zÞÞ and the
‘‘cross’’ for dVarVarz;bbb� ð bYY ðx; zÞÞ.
FIGURE 5. Contour Plot of x0�ðmÞCxðmÞx�ðmÞ, Example 4.
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 165

with their optimal solutions. A contour plot of
x0ðmÞCxðmÞxðmÞ, the second term in dVarVarz;bbb� ð bYY ðx; zÞÞ,
is given in Figure 5. This term corresponds to thescaled variance of the predicted mean. We observe inthis plot how the solution obtained with the newobjective has a smaller prediction error for the meanresponse. In addition, we observe how the proposedobjective is minimized at a location that has betterprediction properties.
As a consequence of the extremely good fit, theoptimal solutions are not as different as in thepreceding example. The proposed objective functionworks better the poorer the model fit. The standarderror for the expected mean obtained withdVarVarðbÞz ðY ðx; zÞÞ and dVarVarzðY ðx; zÞÞ are, respectively,
14% and 15% larger than the one obtained withdVarVarz;bbb� ð bYY ðx; zÞÞ. The prediction intervals obtained
when minimizing dVarVarðbÞz ðY ðx; zÞÞ and dVarVarzðY ðx; zÞÞare 11% and 12% wider than obtained when
minimizing dVarVarz;bbb� ð bYY ðx; zÞÞ, despite the excellent
fit. In this case, the experimenter may prefer thesolution with the smaller prediction interval, sincethe uncertainty for this solution is smaller.
Conclusions
Two new approaches for considering the predictionproperties of the models used in the dual responseapproach to the robust design problem are given. Inthe first approach, a criterion is given to help scalethe noise factors at the design stage. We show thatwhen the prediction properties of the models are notconsidered, the unbiased estimator of the variance ofthe response can take negative values. With theproposed scaling criterion, the experimenter, besidesavoiding negative values of the process varianceestimate, is also able to control the expected meansquared error produced for the part of the model thatdepends on the noise factors. We also show that thevariance transmitted by the noise factors remainsconstant with respect to the scaling. As a byproductof the illustrative examples, it is shown that Box-Behnken designs require wider ranges of the noisefactors than the mixed resolution designs because ofthe large standard error with which they estimate thecontrol � noise interactions. This seems to indicatethat these designs are not appropriate for RPDpurposes.
The second approach consists of a new optimiza-tion criterion that combines all sources of variability
found in the problem (i.e., noise factors, predictionerror, and the estimated prediction variance). Itavoids negative estimates of the process variance andproduces solutions that are robust to both noisefactor variability and parameter estimates uncer-tainty. In particular, the proposed approach isespecially valuable when the goodness of fit of theresponse model is in doubt.
Appendix A: Equivalency Between theBias Correction Term and Variance ofthe Estimated Noise Factor Terms
The prediction model, given x and z, is
bYY ðx; zÞ ¼ b�0�0 þ x0bbbþ x0 bBBxþ z0bggþ x0bDDz:We define
bvvðx; zÞ � z0bggþ x0bDDzand
bmmðxÞ � b�0�0 þ x0bbbþ x0 bBBx:
We understand bmmðxÞ as the part of the modelinvolved in estimating EzðY ðx; zÞÞ and bvvðx; zÞ asthe part involved in the estimation of VarzðY ðx; zÞÞ.That is, the quality of bEEzðY ðx; zÞÞ depends on bmmðxÞ(which is obvious since they are the same), while thequality of dVarVarzðY ðx; zÞÞ as an estimator ofVarzðY ðx; zÞÞ depends on bvvðx; zÞ.
The quality of an estimator can be assessed by itsmean squared error (MSE). The MSE of bvvðx; zÞ,given values of x and z, is
MSEðbvvðx; zÞÞ ¼ Ebgg;bDD vðx; zÞ � bvvðx; zÞð Þ2:
Since bvvðx; zÞ is an unbiased estimator of vðx; zÞ, theMSE equals the variance
Ebgg;bDDðvðx; zÞ � bvvðx; zÞÞ2 ¼ Varbgg;bDDðbvvðx; zÞÞ¼ Varbgg;bDDððbggþ bDD0xÞ0zÞ
¼ �2�z
0Pz:
That is, for a given value of z (and x), we expect anyprediction based on bvvðx; zÞ to have a squared error of�2�z
0Pz, where P is defined as earlier.
The MSE of bvvðx; zÞ averaged over all possiblevalues of z is given by
Journal of Quality Technology Vol. 36, No. 2, April 2004
166 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO

Ez Ebgg;bDDðvðx; zÞ � bvvðx; zÞÞ2� �
¼ Ezð�2�z
0PzÞ
¼ �2�EzðzÞ0PEzðzÞ
þ �2� traceðSzPÞ:
Since EzðzÞ ¼ 0 and P ¼ Cz þ ðx0xÞCd, we obtain
Ez Ebgg;bDDðvðx; zÞ � bvvðx; zÞÞ2� �
¼ �2�
�traceðSzCzÞ
þðx0xÞtraceðSzCdÞ�;
therefore, the bias correction factor in Equation (9)traceðSzCzÞ þ ðx0xÞtraceðSzCdÞ is the scaled, ex-pected MSE of bvvðx; zÞ or, equivalently, the scaledexpected variance of bvvðx; zÞ, since the bias is zero.
Appendix B: Invariance to Changes inScale of the Contribution of theVariance Due to Noise Factors
We let D1, g1, and Sz;1 represent the correspondingparameters of Equation (1) and the covariancematrix of the coded noise variables when they areonly scaled by their standard deviation (i.e., whenc ¼ 1 and, hence, zi ¼ ð�i � ��iÞ=��i). In addition, welet Dc, gc, and Sz;c represent the parameters and thecovariance matrix when a scaling factor c 6¼ 1 is used.Since these parameters correspond to terms that arelinear in the noise variables, we have Dc ¼ cD1,gc ¼ cg1, and Sz;c ¼ ð1=c2ÞSz;1. With this, the invar-iance mentioned earlier is easily shown:
ðgc þ D0cxÞ
0Sz;cðgc þ D0
cxÞ
¼ ðcg1 þ cD1xÞ01
c2Sz;1ðcg1 þ cD1xÞ
¼ c2ðg1 þ D1xÞ01
c2Sz;1ðg1 þ D1xÞ
¼ ðg1 þ D1xÞ0Sz;1ðg1 þ D1xÞ:
Acknowledgments
The authors wish to express their gratitude to twoanonymous referees for the careful reviews andsuggestions which have resulted in an improvedpresentation of this work. This research was fundedby NSF grant DMI 9988563.
References
Arnold, S. F. (1990). Mathematical Statistics . Prentice Hall,Englewood Cliffs, NJ.
Arnold, S. F. (1981). The Theory of Linear Models and
Multivariate Analysis . Wiley, New York, NY.
Borror, C. M.; Montgomery, D. C.; and Myers, R. H.
(2002). ‘‘Evaluation of Statistical Designs for ExperimentsInvolving Noise Variables’’. Journal of Quality Technology
34, pp. 54–70.
Borror, C. M. and Montgomery, D. C. (2000). ‘‘MixedResolution Designs as Alternatives to Taguchi Inner/OuterArray Designs for Robust Design Problems’’. Quality andReliability Engineering International 16, pp. 117–127.
Borkowski, J. J. and Lucas, J. M. (1997). ‘‘Design of MixedResolution for Process Robustness Studies’’. Technometrics39, pp. 63–70.
Cantell, B.; Ram�irez, J.; and Gadson, W. (1997).‘‘Optimization of a Wafer Stepper Alignment System UsingRobust Design’’ in Statistical Case Studies for Industrial
Process Improvement edited by V. Czitrom and P. D.Spagon, SIAM, Philadelphia, PA.
Box, G. E. P. and Jones, S. (1990). ‘‘Designing ProductsThat Are Robust To The Environment’’. Report Series inQuality and Productivity. CPQI, University of Wisconsin,Number 56.
Engel, J. and Huele, F. (1996). ‘‘A Generalized LinearModeling Approach to Robust Design’’. Technometrics 38,pp. 365–373.
Giovannitti-Jensen, A. and Myers, R. H. (1989). ‘‘Gra-phical Assessment of the Prediction Capability of ResponseSurface Designs’’. Technometrics 31, pp. 159–171.
Khatree, R. (1996). ‘‘Robust Parameter Design: A ResponseSurface Approach’’. Journal of Quality Technology 28,pp. 187–198.
Lucas, J. M. (1994). ‘‘How to Achieve a Robust ProcessUsing Response Surface Methodology’’. Journal of QualityTechnology 26, pp. 248–260.
Myers, R. H. (1991). ‘‘Response Surface Methodology inQuality Improvement’’. Communications in Statistics—Theory and Methods 20, pp. 457–476.
Myers, R. H.; Khuri, A. I.; and Vining G. (1992).‘‘Response Surface Alternatives to the Taguchi RobustParameter Design’’. The American Statistician 46, pp. 131–139.
Myers, R. H.; Vining, G. G.; Giovannitti-Jensen, A.;
and Myers, S. L. (1992). ‘‘Variance Dispersion Propertiesof Second-Order Response Surface Designs’’. Journal of
Quality Technology 24, pp. 1–11.
Myers, R. H.; Kim, Y.; and Griffiths, K. L. (1997).‘‘Response Surface Methods and the use of Noise Variables.Journal of Quality Technology 29, pp. 429–440.
Myers, R. H. and Montgomery, D. C. (2002). ResponseSurface Methodology: Process and Product Optimization
Using Designed Experiments . Wiley, New York, NY.
Neff, A. R. and Myers, R. H. (1999). ‘‘Recent Develop-ments in Response Surface Methodology and its Applica-tions in Industry’’ in Statistical Process Monitoring and
Optimization edited by Sung H. Park and G.G. Vining,Marcel Dekker, New York, NY, pp. 457–481.
Vol. 36, No. 2, April 2004 www.asq.org
TWO APPROACHES FOR IMPROVING THE DUAL RESPONSE METHOD IN ROBUST PARAMETER DESIGN 167

Neter, J.; Kutner, M. H.; and Nachtsheim, C. J. (1996).Applied Linear Statistical Models . WCB-McGraw-Hill, NewYork, NY.
Shoemaker, A. C.; Tsui, K.-L.; and Wu, C. F. J. (1991).‘‘Economical Experimentation Methods for Robust Design’’.Technometrics 33, pp. 415–427.
Taguchi, G. (1986). Introduction to Quality Engineering .Quality Resources, White Plains, NJ.
Taguchi, G. (1987). System of Experimental Design: En-
gineering Methods to Optimize Quality and Minimize Cost .Quality Resources, White Plains, NJ.
Vining, G. G. and Myers, R. H. (1990). ‘‘CombiningTaguchi and Response Surface philosophies: A dual responseapproach’’. Journal of Quality Technology 22, pp. 38–45.
Vining, G. G. (1993). ‘‘A Computer Program for GeneratingVariance Dispersion Graphs ’’. Journal of Quality Technol-
ogy 25, pp. 45–58.
Journal of Quality Technology Vol. 36, No. 2, April 2004
168 GUILLERMO MIR�OO-QUESADA AND ENRIQUE DEL CASTILLO