Ryu Fujimoto and Noboru Sakamoto Nagoya University · NAGOYA UNIVERSITY Aerospace Engineering...
18
NAGOYA Univ. NAGOYA UNIVERSITY Aerospace Engineering Control Systems Engineering The stable manifold approach for optimal swing up and stabilization of an inverted pendulum with input saturation Ryu Fujimoto and Noboru Sakamoto Nagoya University IFAC World Congress 2011 August 31
Transcript of Ryu Fujimoto and Noboru Sakamoto Nagoya University · NAGOYA UNIVERSITY Aerospace Engineering...

NAGOYA Univ.
NAGOYA UNIVERSITY
Aerospace Engineering
Control Systems Engineering
The stable manifold approach for optimal swing up and stabilization of an inverted pendulum with input
saturation
Ryu Fujimoto and Noboru Sakamoto
Nagoya University
IFAC World Congress 2011 August 31

NAGOYA Univ.
Outline
Background and problem formulation
Nonlinear optimal control
Approximation methods for HJ equations
Stable manifold approach
Simulation / Experiment results
Non-uniqueness of solution in HJ equations
Concluding remarks

NAGOYA Univ.
Inverted pendulum
Strong nonlinearity
Under actuated system
Benchmark problem of nonlinear controller design
Swing up and stabilization of inverted pendulum
Switching of swing up and stabilization controllers (Astrom & Furua ’00)
Topological issues / (Angeli ‘01, Astrom et.al ‘08)
Background/problem statement
This talk: Single optimal state feedback control Enhancement of valid approximation range for HJ eq.
NAGOYA Univ.
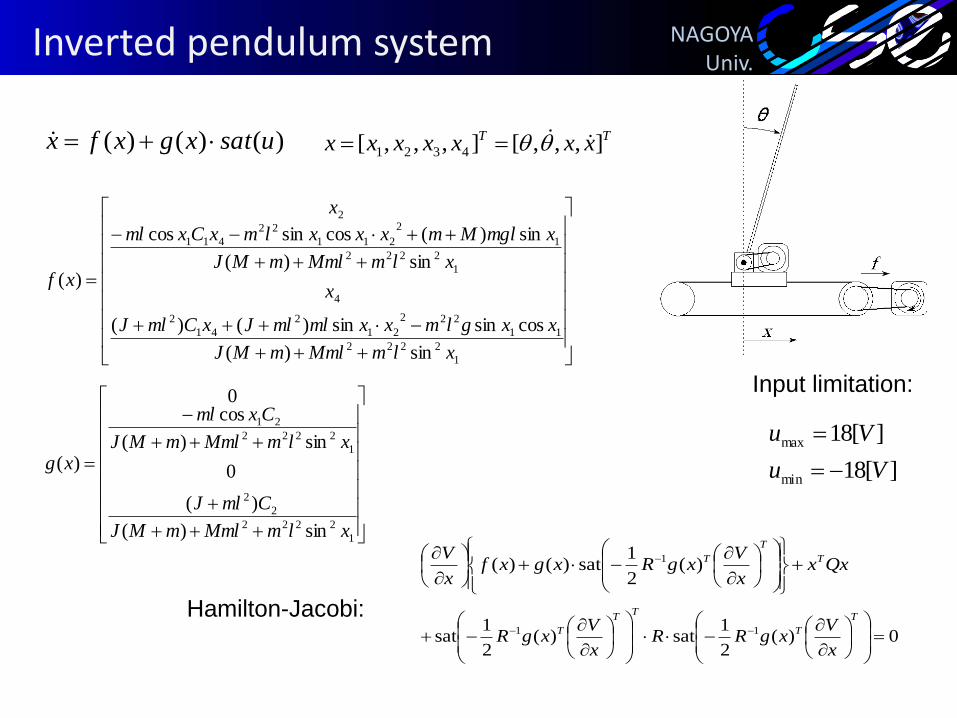
Inverted pendulum system
1
2222
11
222
21
2
41
2
4
1
2222
1
2
211
22
411
2
sin)(
cossinsin)()(
sin)(
sin)(cossincos
)(
xlmMmlmMJ
xxglmxxmlmlJxCmlJ
x
xlmMmlmMJ
xmglMmxxxlmxCxml
x
xf
1
2222
2
2
1
2222
21
sin)(
)(
0
sin)(
cos0
)(
xlmMmlmMJ
CmlJ
xlmMmlmMJ
Cxml
xg
TT xxxxxxx ],,,[],,,[ 4321)()()( usatxgxfx
][18
][18
min
max
Vu
Vu
Input limitation:
0)(2
1sat)(
2
1sat 11
T
T
TT
T
x
VxgRR
x
VxgR
Qxxx
VxgRxgxf
x
V T
T
T
)(2
1sat)()( 1
Hamilton-Jacobi:

NAGOYA Univ.
・Taylor approximation method:
・Stable manifold approach:(N.Sakamoto and A.J.van der Schaft, IEEE TAC, 2008)
Approximate solutions for HJ eq
(○) is directly computed
(○) iterative method suitable for computer implementation
(○) Larger domain of convergence etc…
x
V
(×) Cannot handle non-analytic nonlinearities
(×) Computationally inefficient
(×) Small domain of convergence

NAGOYA Univ.
Stable manifold method for HJ eq.

NAGOYA Univ.
Stable manifold method for HJ eq.

NAGOYA Univ.
Closed loop trajectories for different iteration number
Computational result
-4 -3 -2 -1 0-1.5
-1
-0.5
0
0.5
1
1.5
pendulum angle(rad)
H
k=0(linear)k=6k=10k=25
Initial value
○
-4 -3 -2 -1 0-5
0
5
10
15
pendulum angle(rad)
an
gu
lar
velo
city
(ra
d/s
)
k=0
k=6
k=10
k=25
Hamiltonian Trajectories in the (θ,dθ/dt)-space
Initial value
○
(HJ eq.) QxxxpxgRxgxfxpH TTT
)()(
2
1sat)()()( 1
0)()(2
1sat)()(
2
1sat 11
xpxgRRxpxgR T
T
T

NAGOYA Univ. Simulation/Experiment results
Input voltage is under the limitation 18[V] Swing up with 2 swings → Robustness for parameter variations 20% →
Movie1
Movie2
Responses (simulation)
17.7[V]

NAGOYA Univ.
What do saturation functions do?
Effect of saturation function
Responses (simulation)
Saturation is an identity function inside of limitation
The solution solves the original HJ eq as well??
Qxxx
VxgRxgxf
x
V T
T
T
)(2
1sat)()( 1
0)(2
1sat)(
2
1sat 11
T
T
TT
T
x
VxgRR
x
VxgR
Hamilton-Jacobi eq with saturations
Simulation by HJ eq without saturation function
- Swing up control with 1 swing - Input voltage is far beyond 18[V]
NAGOYA Univ.
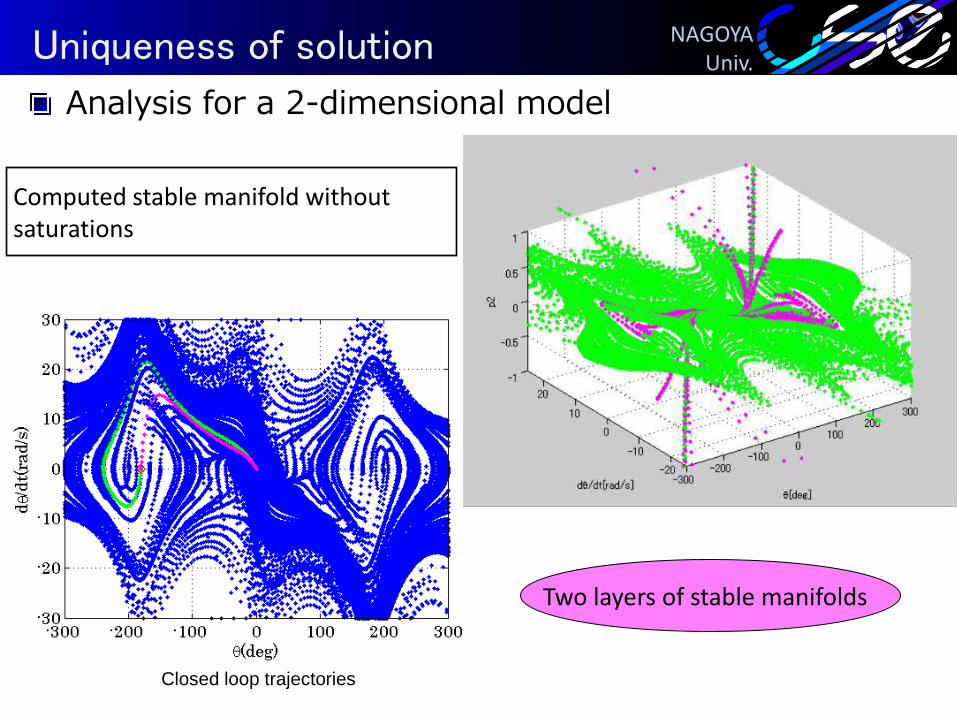
Analysis for a 2-dimensional model
Uniqueness of solution
Closed loop trajectories
Two layers of stable manifolds
Computed stable manifold without saturations
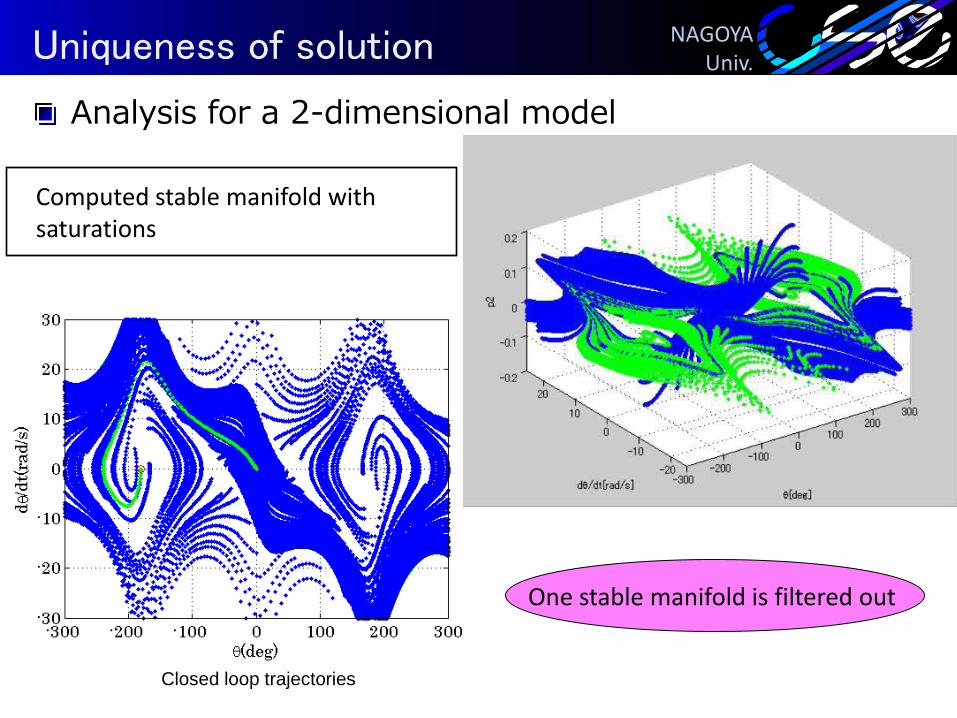
NAGOYA Univ. Uniqueness of solution
Closed loop trajectories
Computed stable manifold with saturations
One stable manifold is filtered out
Analysis for a 2-dimensional model

NAGOYA Univ. With smaller input constraint…
Swing up with 3 swings
Efficient strategy with low voltage
Third stable manifold → infinite layers
Movie3
Responses (simulation)
Apply 40 iterations of the stable
manifold algorithm
][12
][12
min
max
Vu
Vu
][18
][18
min
max
Vu
Vu
Feedback function is expressed
with polynomials
11.8[V]

NAGOYA Univ.
Concluding remarks
Optimal swing up and stabilization of inverted pendulum
Single feedback by solving a Hamilton-Jacobi equation
Large domain of validity to include the pending position
Explicitly include saturation functions in the HJ equation
1 swing, 2 swing and 3 swing controllers by changing the value of input limitation
An example of non-unique solutions to HJ equation

NAGOYA Univ.
Thank you for your attention

NAGOYA Univ. Stable manifold algorithm
N.Sakamoto and A.J.van der Schaft, 2008
),(),,( tptx kk converge to a solution on k),,0[
),(
),(
pxpFp
pxxFx
T
,2,1,0,,
,2,1,0,,
0,,
)(
1
01
00
kdsspsxetp
kdsspsxeetx
tpetx
tkk
stF
k
t
kk
stFFt
k
At
T
・・・(※)
A Hamiltoinan system
Stable F,smooth nonlinearities pxpx ,,,

NAGOYA Univ. Limitation of the Taylor method
,3 uxxx
1-dimensional optimal control problem
1)1(
02
1
2
1)(
223
223
xxxxp
xpxxpH
0
22 dtuxJ
Series solutions cannot approximate for
19.1x
has complex zeros at 19.1|| z1)1( 22 z

NAGOYA Univ.
Inverted pendulum setup