Robotica verso il 2020? - Politecnico di...
64
Robotica verso il 2020? Robotica verso il 2020? Giuseppina Gini
Transcript of Robotica verso il 2020? - Politecnico di...

Robotica verso il 2020?Robotica verso il 2020?Giuseppina Gini
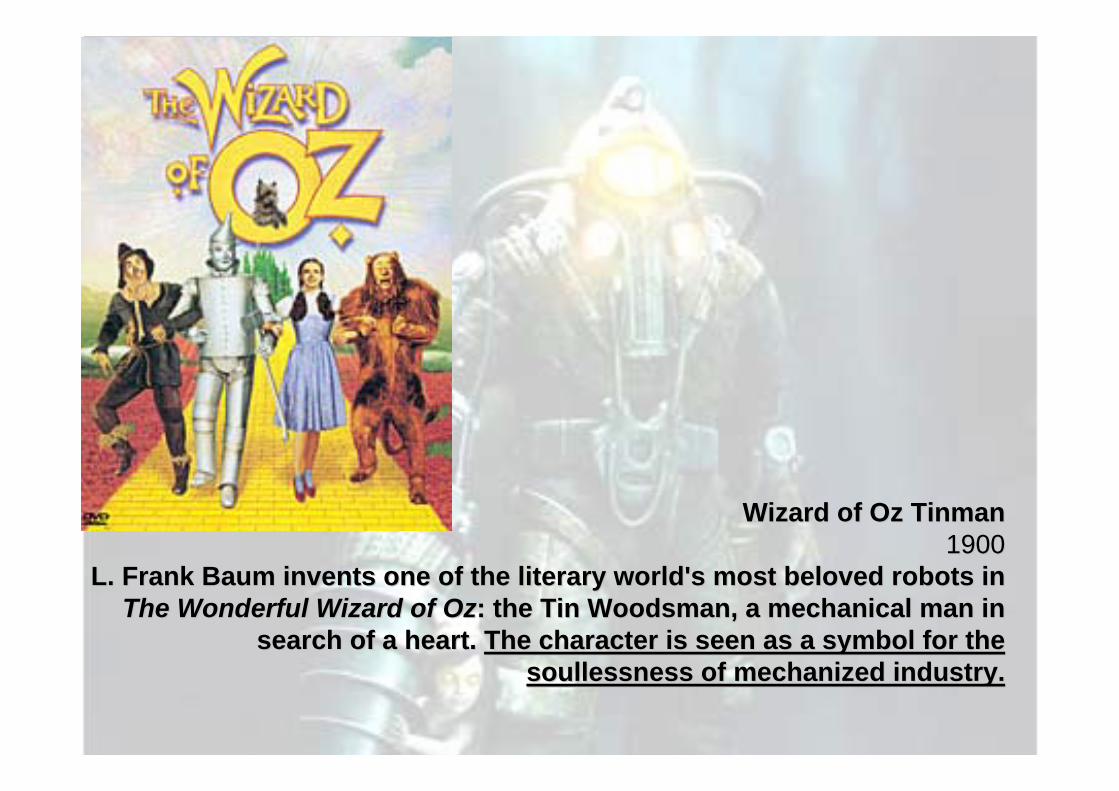
Wizard of Oz Wizard of Oz TinmanTinman19001900
L. Frank Baum invents one of the literary world's most beloved rL. Frank Baum invents one of the literary world's most beloved robots in obots in The Wonderful Wizard of OzThe Wonderful Wizard of Oz: the Tin Woodsman, a mechanical man in : the Tin Woodsman, a mechanical man in
search of a heart. search of a heart. The character is seen as a symbol for the The character is seen as a symbol for the soullessness of mechanized industry.soullessness of mechanized industry.

CapekCapek’’s s RobotaRobota19211921
Czech playwright Karl Capek popularizes the term "robot" in a Czech playwright Karl Capek popularizes the term "robot" in a play called "R.U.R. (play called "R.U.R. (RossumsRossums Universal Robot)." The word comes Universal Robot)." The word comes
from the Czech from the Czech robotarobota, which means forced work. The play ends , which means forced work. The play ends with robots taking over the earth and destroying their makers.with robots taking over the earth and destroying their makers.

MetropolisMetropolis19261926
Film director Fritz Lang releases Metropolis, a silent film set Film director Fritz Lang releases Metropolis, a silent film set in a in a futuristic urban dystopia. It features a female robotfuturistic urban dystopia. It features a female robot----the first to the first to
appear on the silver screenappear on the silver screen----who takes the shape of a human who takes the shape of a human woman in order to destroy a labor movement.woman in order to destroy a labor movement.
AsimovAsimov’’s Three Laws of Roboticss Three Laws of Robotics19421942
American science fiction author Isaac Asimov publishes a short sAmerican science fiction author Isaac Asimov publishes a short story, tory, "Runaround," that introduces the "Three Laws of Robotics""Runaround," that introduces the "Three Laws of Robotics"----rules that rules that
every robot is programmed to obey: every robot is programmed to obey: 1. A robot may not harm a human being, or, through inaction, all1. A robot may not harm a human being, or, through inaction, allow a ow a
human being to come to harm.human being to come to harm.2. A robot must obey the orders given to it by human beings exce2. A robot must obey the orders given to it by human beings except where pt where
such orders would conflict with the First Law.such orders would conflict with the First Law.3. A robot must protect its own existence, as long as such prote3. A robot must protect its own existence, as long as such protection ction
does not conflict with the First or Second Law.does not conflict with the First or Second Law.

UnimationUnimation19561956
George George DevolDevol and Joseph and Joseph EngelbergerEngelberger (pictured) (pictured) form the world's form the world's first robotics company, first robotics company, UnimationUnimation....

UnimateUnimate19611961
UnimateUnimate, the world's first industrial robot, goes to work on a , the world's first industrial robot, goes to work on a General Motors assembly line.General Motors assembly line.

ShakeyShakey19661966
The Artificial Intelligence Center at the Stanford Research CentThe Artificial Intelligence Center at the Stanford Research Center er begins development of begins development of ShakeyShakey, the first mobile robot. It is , the first mobile robot. It is
endowed with a limited ability to see and model its environment endowed with a limited ability to see and model its environment and is controlled by a computer that fills an entire roomand is controlled by a computer that fills an entire room..

HALHAL19681968
HAL 9000 (HAL 9000 (HHeuristically programmed euristically programmed ALALgorithmicgorithmic computer) appears computer) appears in the Stanley Kubrick film 2001: A Space Odyssey, written by Arin the Stanley Kubrick film 2001: A Space Odyssey, written by Arthur thur
C. Clarke. The artificially intelligent computer runs the spacesC. Clarke. The artificially intelligent computer runs the spaceship. hip. The The character reflects concern about the increasing power of intellicharacter reflects concern about the increasing power of intelligent gent
machines over man.machines over man.

StarWarsStarWars19771977
R2R2--D2 and CD2 and C--3PO appear in George Lucas' 3PO appear in George Lucas' Star WarsStar Wars films.films.

DanteDante19931993
An eightAn eight--legged robot named Dante attempts to explore legged robot named Dante attempts to explore Antarctica's Mount Erebus volcano. It is remotely controlled froAntarctica's Mount Erebus volcano. It is remotely controlled from m
the U.S. and collects a small amount of data before mechanical the U.S. and collects a small amount of data before mechanical difficulties end the experiment. difficulties end the experiment. But the landmark effort ushers in a But the landmark effort ushers in a
new era of robotic exploration of hazardous environments.new era of robotic exploration of hazardous environments.

FurbyFurby19981998
A fuzzy, A fuzzy, batlikebatlike robot called robot called FurbyFurby becomes the mustbecomes the must--have toy of have toy of the holiday season. The $30 toys seemingly "evolve" over time, the holiday season. The $30 toys seemingly "evolve" over time,
first speaking in gibberish but soon developing the use of first speaking in gibberish but soon developing the use of preprogrammed English phrases. More than 27 million of the toys preprogrammed English phrases. More than 27 million of the toys
sell in a 12sell in a 12--month period.month period.

AiboAibo19991999
Gadget lovers develop a serious case of puppy love for Sony's roGadget lovers develop a serious case of puppy love for Sony's robot bot dog AIBO.dog AIBO.
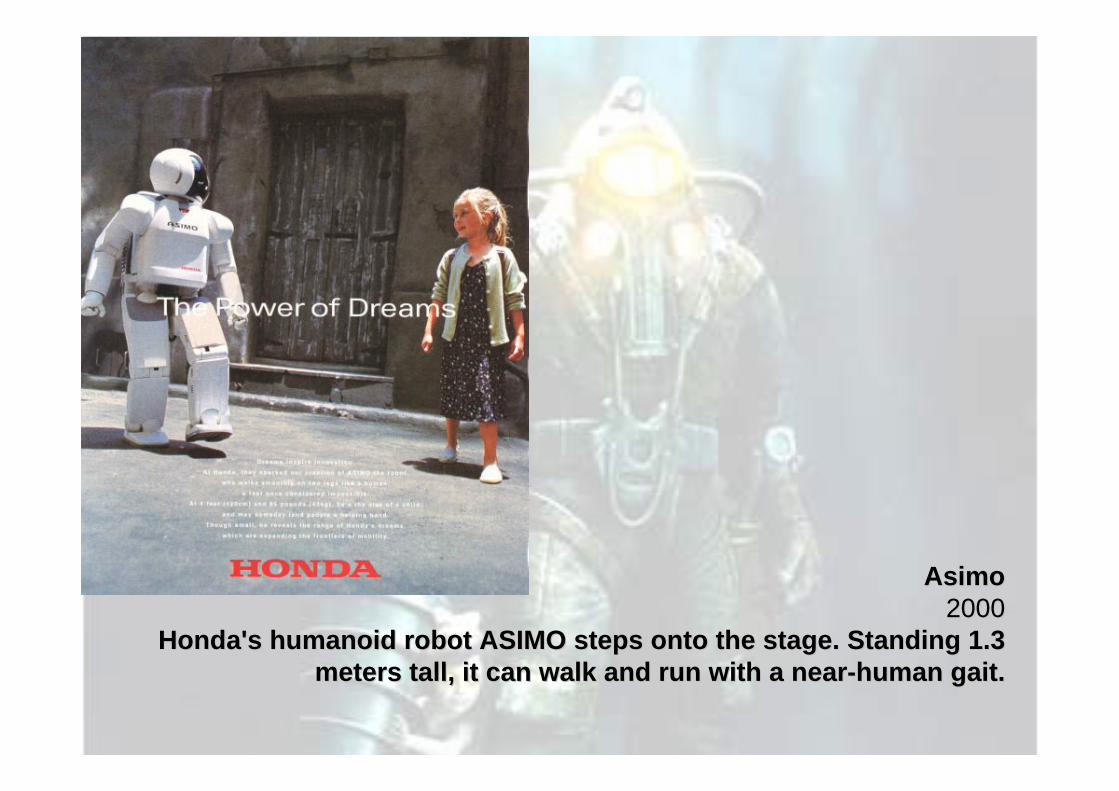
AsimoAsimo20002000
Honda's humanoid robot ASIMO steps onto the stage. Standing 1.3 Honda's humanoid robot ASIMO steps onto the stage. Standing 1.3 meters tall, it can walk and run with a nearmeters tall, it can walk and run with a near--human gait.human gait.

RoombaRoomba20022002
The The RoombaRoomba robotic vacuum from the robotic vacuum from the iRobotiRobot Corp. is released. Corp. is released. The FrisbeeThe Frisbee--shaped device has sold over 2 million units to date, shaped device has sold over 2 million units to date,
making it the most commercially successful domestic robot in making it the most commercially successful domestic robot in history.history.


Robot market Robot market forecastforecast

Rapporto 2008Rapporto 2008Market2007 6.5 milioni di robot nel mondoCrescita 3% nei robot industrialiCrescita 15% in EuropaGiappone è il principale mercatoGermania è il primo mercato in Europa, Italia il secondo
Robot density310/10000 lavoratori del manufacturing in Giappone234/1000 la Germaniapoi Korea, Italia, USA, Svezia

Applicazioni industrialiApplicazioni industriali

Robot industriali in usoRobot industriali in uso
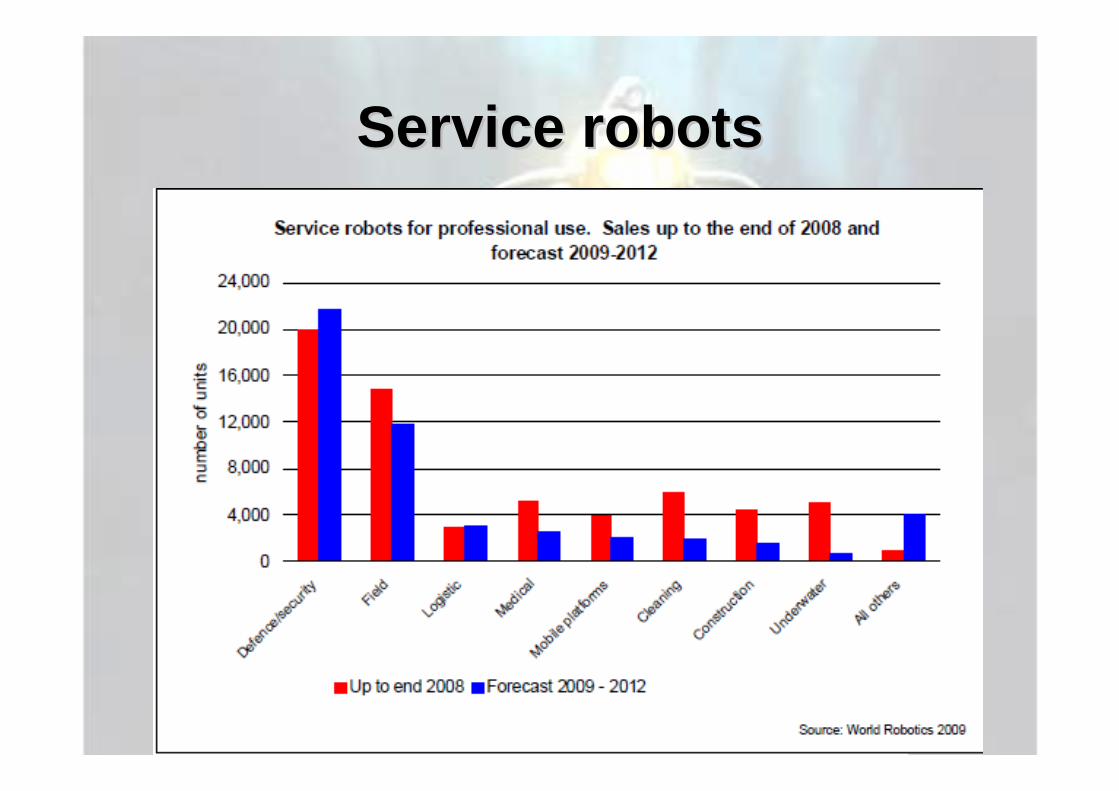
Service Service robotsrobots

Industrial robot Industrial robot -- ISOISO• Un robot è un manipolatore multifunzionale
riprogrammabile, comandatoautomaticamente. Un robot deve avere tre o più assi. Può essere fisso oppure spostarsisu carrello o rotaia.
• Un robot mobile è un sistema in grado di spostarsi in ambienti più o meno strutturatitramite vari apparati di locomozione (ruote o zampe). Di solito questi robot sono dotati di sensori che permettono di esplorarel’ambiente.
Classificazione Classificazione -- secondo applicazionisecondo applicazioni• Industrialiì
saldatura,verniciatura,montaggio ed assemblaggio,manipolazione,guarnizione e sigillatura,packaging (es. alimentare),trasferimento fra isole/linee/magazzini,assistenza allo stampaggio o forgiatura,taglio laser 3d,controllo qualità con sensori,fonderia (manipolazione, rimozione forme di colata, sbavaturachimica combinatorialaboratorio analisi
• applicazioni specialiapplicazioni chirurgiche (endoscopiche, microchirurgiche, telechirurgiche, etc.),per medicina (robot mobili per assistenza con manipolatori specali)spaziali,sottomarine
nucleari (prevenzione ed emergenza),militari (veicoli robotizzati, geologiche (esplorazione),archeologiche,sicurezza impianti (robot e manipolatori per ambienti ostili/esplosivi),Sminamentomovimento terracostruzioni

Classificazione Classificazione -- secondo mobilitsecondo mobilitàà
fissimobilisu rotaiesu ruotesu cingolisu zampe …
secondo tipologia articolazioni,cartesianicilindricisferici“scara”articolatia 3 dof, a 4 dof, a 5 dof, a 6 dof, oltre 6 dofcomposti (es. antropomorfi)
secondo topologia parallela/seriale,paralleliseriali(ibridi/composti)

Classificazione Classificazione -- secondo precisionesecondo precisionealta precisione e ripetibilità (robot cartesiani, robot
paralleli. Per lavorazioni e saldature miniaturizzate)
media precisione (es: per manipolazione, montaggio)
bassa precisione (robot articolati con molti d.o.f., es. per packaging, verniciatura, appl. biomecc.)
secondo velocitàrobot lenti, per operazioni con precisione elevata robot rapidi (es. per packaging, con controllo PTP)

secondo grado evolutivosecondo grado evolutivo• da associazione Robotics Usa
• 1-robot “playback”2-robot programmabili (comportamento condizionale, I/O)3- robot con riconoscimento visivo4- robot con AI e reti neurali

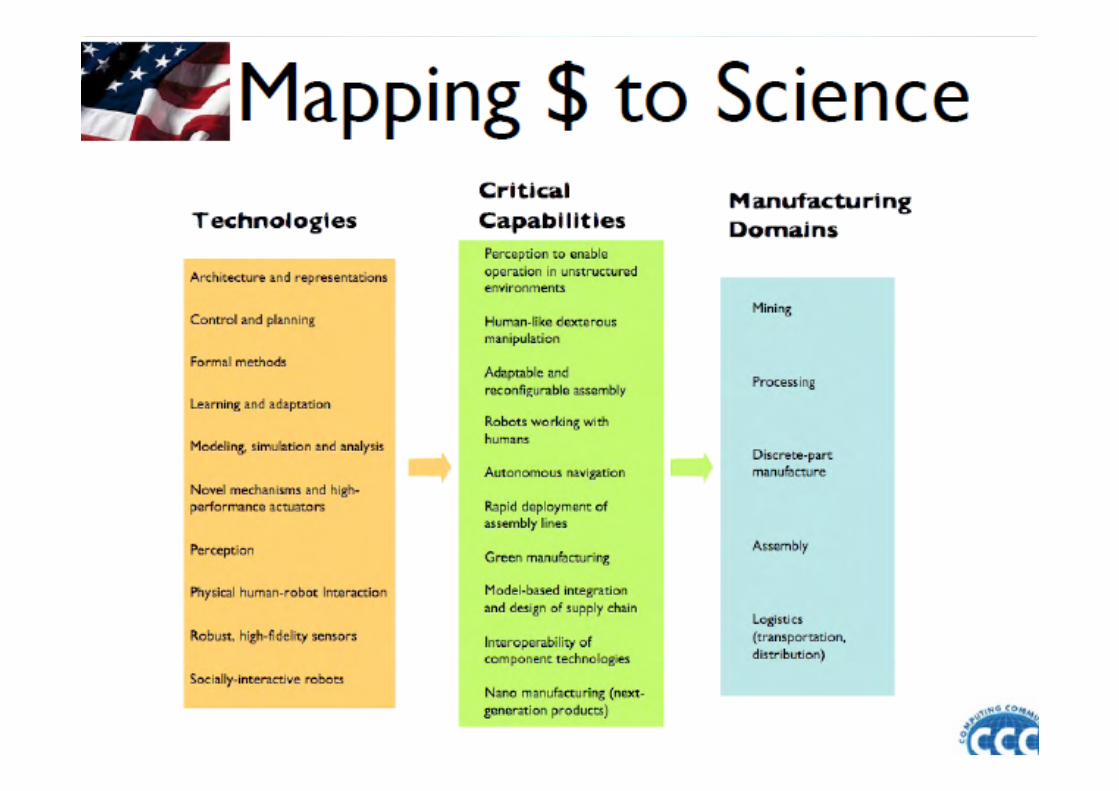
Technical Coordinating Technical Coordinating
Unit onUnit on
Robot PlanningRobot Planning

RoadmapRoadmap• Problems and challenges in Robot
Planning• State of the art• Technology maturity • What needs to be done• Research at TCU Nodes
A summit of AI A summit of AI peeoplepeeople -- USAUSACHARLES PETIT: We have predictions that in 30 years there will be robots
that walk and talk like people and have emotions. They'll take your kids tothe soccer game, tell you when to get up in the morning, and help pick out groceries. They'll even sit down and have a talk with you about how you're getting along with your wife or husband. But if we don't even understandhow our own brains work, how will we be able to build something thatintelligent? What do you think, Marvin? Is such a future possible?
MARVIN MINSKY: Oh, I'm sure it's possible, although one can't predicthow long it will take. And we won't need to know all about how brainswork, because there may be simpler ways. But it seems to me--and I disagree with most of the other people on this panel--that building mechanical robots that look like people so that they evoke emotionalreactions is just a waste of time. It hasn't led to any improvement in knowledge about how to do the important things that would makemachines really smart. The key problem is how to imbue computerswith what John McCarthy and I call "commonsense reasoning." There's no robot "alive" today that knows general things, like if you let go of something, it will fall. No robot knows that you can pull something witha string but you can't push it with a string. Little things like that. The average 5-year-old knows a few hundred thousand of those things and anadult a few million. Today there are only a handful of people working on commonsense reasoning, so you can't say how long it will take beforerobots are truly smart
Summit 2Summit 2CHARLES PETIT: John, we were talking about interfaces and whether robots
ought to be made into companions and almost members of society. Howdo you feel about that?
JOHN McCARTHY: Well, I agree with Marvin substantially. It's probablyeasier to program in emotions than intelligence. Allow me to sharpen up a couple of points that have been made so far. Imagine that we have robot servants that will do housework, and imagine a child who is born into a family with robot servants. In my opinion, the robots need to bedesigned so that they will be regarded as appliances rather than aspeople. We don't want robots that people will hate or fall in love with or anything like that. We have enough trouble treating other people decentlywithout inventing a new oppressed minority. Also, we are not yet withindevelopment range of a general-purpose household servant. There are conceptual problems to be solved. In a certain sense, a large part of the field of artificial intelligence is following the wrong tracks, and I'm sureI'm following some of them.

Summit Summit -- 33CHARLES PETIT: Joe Herkert, Is there also an ethical dimension to havingmachines look and act like people?
JOE HERKERT: Yes, I think so. We're very good at the how of technology, butwe're not as good at the why. I'm particularly troubled by suggestions that weought to be making robots that are so humanlike, both in terms of intelligence and emotions, that they become indistinguishable from humans. In the near term, it makes it more likely that people might shun contact with humans. We see thisalready--and I'm as guilty of this as anyone else--with our computers and tvs. Technology, while it presents possibilities for contacting others, also presentspossibilities for isolating us from others. If I have a robot as a best friend, then I am less likely to have a person as a best friend.
MARVIN MINSKY: So what?
JOE HERKERT: Well, I would much rather have a person as a best friend.
MARVIN MINSKY: Yeah, but why? You're not speaking as a person but as anethicist. Suppose that the robot had all of the virtues of people and was smarterand understood things better. Then why would you want to prefer those grubbyold people?

Summit Summit -- 44JOE HERKERT: Well, for one, I doubt that the robot would have the virtues.
MARVIN MINSKY: You can doubt it, but what's your basis? Now you're notspeaking as an ethicist but as a skeptic. Suppose that robots will have all the virtues of people and more. Then where do you stand?
JOE HERKERT: Well, that's an assumption I can't accept. I can't accept thata robot would have ethics, for example. Only people can have ethics. Butlet's take it for granted that what Marvin and I were just jousting about can beachieved. Then I see a serious problem in human life being devalued. If we can have robots who have all our virtues and can do jobs more efficiently and never complain, why would we need imperfect humans? I fear that the people who would be most in jeopardy are the people who are marginalized in society--the poor, minorities, perhaps women, people in developing countries.
MARVIN MINSKY: That's what they said when Darwin started to promulgate his theory. I don't see anything wrong with human life being devalued if wehave something better.

Summit Summit -- 55ERIC HASELTINE: If you want to adapt technology to people, you have to go to wherepeople are. You don't want to bring people to the technology.
MARVIN MINSKY: It's true they have to be somewhat familiar, but nobody hangs faceson toasters. We don't make most appliances look like people. The new point to me is the idea that we don't want people to learn to order around servants that look like people, because that's catching. If you tell a household robot to do unspeakable, disgusting, or just boring things, you'll get the hang of telling other people to. And most human interactionsare rotten already. People lie, they cheat, they do all sorts of awful things. We've got to becareful not to say that things are OK as they are and that we want them to stay that way.
CHARLES PETIT: Plus we don't want to teach the robots to be rotten.
JOE ENGELBERGER: There's no necessity for robots to be evil unless, as Marvin says, we deliberately generate evilness in them.
ERIC HASELTINE: As with any technology, there is the potential for abuse, and itundoubtedly will happen. Robots will evolve pretty much like prime-time tv shows, basedon the evolutionary forces in the marketplace. Whether we like it or not, what we ashumans want is going to dictate the shape that robots take.

fromfrom IntelIntelWhat are the biggest challenges facing robotics researchers today?
One of the key challenges in robotics over the last 20 years has been the issue of localization- that is, how does a robot actually know where it is? Intel is tackling this challenge through research such as the Precision Location project. Over the next few years, Intel's mobile group is preparing to deliver a universal location framework that will enable a mobile device-a PDA, cell phone, or laptop-to know where it is and what computing resources are in the local area. This framework will be useful in the roboticsenvironment. If a robot moves through a network dead zone, for example, and it knowsthere's network connectivity a short way ahead, and it needs some computing assistance, the robot would know to move into that area to get the information it needs.
We think that Intel's research in the areas of localization, mapping and navigation will bevery useful to the robotics community. If Intel can provide a framework for doing thatwork, researchers can focus on some other hard problems, like how to train a robot to do something useful, such as picking up a trash can without bumping into plants or otherobjects.
The hardest problem that robotics researchers face is something Intel can't address, and that's where we're looking for our commercial partners to help. The probleminvolves how robots interact with the physical world. Today robotic systems are driven by electric motors, which have a very poor power-to-weight ratio. Honda's Asimo robot can't pick up more than a quarter-pound hamburger. Here is this 120-pound object walking around, and when it tries to pick something up and it can only pick up four ounces.
So the real problem is not providing the computational horsepower to get a robot to a

EU EU -- FunzionalitFunzionalitàà e tecnologiee tecnologie

Cognitive Systems, Cognitive Systems, Interaction, Robotics: 7Interaction, Robotics: 7°° EUEUartificial systems need to be more…
1. adaptive - to changing tasks and situations;2. robust – against surprise;3. effective – improve performance through
anticipating or predicting the future;4. natural - in dealing with humans and human-like
behaviour.
In a nutshell:artificial systems should be able to function effectively in circumstances that were not planned for explicitly when the system was designed
… an engineering goal

Cognitive system Cognitive system perspectiveperspective

Functionality Functionality --> Technology> Technology
• A functionality is a feature made available upon request in order to pursue a certain goal.
• They are characterized by what they provide to services and how they provide it.
• Each functionality is enabled by one or more technology.
3D ImagingArtificial LifeBroadbandData CaptureHuman InterfacingImage RecognitionInformation Displaying Information RetrievalLanguage Understanding Embedded SystemMultimodePerson IdentificationSeamless Ubiquitous AccessSensing
Virtual PresenceTerminals/Wearable…..

Artificial LifeArtificial Life
"Artificial Life" • research into human-made systems that possess some of the essential properties of life. •to understand high-level behavior from low-level rules; for example, how the simple rules of Darwinian evolution lead to high-level structure, or the way in which the simple interactions between ants and their environment lead to complex trail-following behavior.

AlifeAlife to roboticsto robotics• The construction of living systems out
of non-living parts is clearly the most ambitious of all the areas of Artificial Life.
• At present, two largely independent endeavors: – the creation of life using the classical
building blocks of nature (carbon-based life) - attempting to construct self-replicating molecules
– the creation of life using the same principles but a different medium for implementation: the computer- by simulating simple populations of self-replicating entities
• an impressive engineering effort is geared towards the construction of adaptive autonomous robots. This work differs from the classical robotics approach, in that the robotic agent interacts with its environment and learns
Artificial Life Artificial Life -- keywordskeywords
SymbioticSocialMicroSwarm

in health carein health care
Time
Human Genoma
Drug synthesesFast Mapping
Symbioses
MonitoringBio-Substitution

DisruptionsDisruptions
Technological evolution, the availability of novel functionalities and the widespread adoption of new services is likely to create new ways of living.
Transformation of Products into ServicesThe Disappearance of the Computer Ubiquitous seamless connectivityChanging Traffic PatternsInfinite BandwidthDisposable ProductsAutonomous SystemsFrom Content to PackagingThe emergence of Virtual Infrastructures

From Products to ServicesFrom Products to Services
• Selling products limits the interaction with the client at the selling point (in space and in time).
• In a service sale the contact continues through the usage of the service
• On the other hand selling a product means making the intended margin as the sale is sealed. In a service relationship revenues are distributed over time.
• Technologies are getting cheaper and accessibility to central management, distribution centres is becoming easier. This is enabling the transformation of products into services.
• Rather than selling hardware companies are moving into providing hardware (at very low cost or even for free) to run the services

From Products to ServicesFrom Products to Services
Technological Enabling FactorsEmbedding of communications capabilitiesRising of profiling Cheaper production processes
Embedded Systems Seamless Ubiquitous Access Communications

From Products to ServicesFrom Products to Services
Technological Enabling FactorsMarket Driven Factors
Products becoming commoditiesLoss of differentiation capabilities Increased copycat possibilities

From Products to ServicesFrom Products to Services
Technological Enabling FactorsMarket Driven FactorsIndustry Impact
Transformation into service companies Shortening of products’ life cycle Strong increase in call centersAutomated customised assistance Increased globalisation of the market Restructuring of the value chain

From Products to ServicesFrom Products to Services
Technological Enabling FactorsMarket Driven FactorsIndustry ImpactMarket Sectors Affected
Health care Entertainment Transportation Consumer appliances Education …
PresentationPresentation toto the American the American CongressCongress