
Research Article Robust Distributed Model...
11
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 468168, 10 pages http://dx.doi.org/10.1155/2013/468168 Research Article Robust Distributed Model Predictive Load Frequency Control of Interconnected Power System Xiangjie Liu, 1 Huiyun Nong, 1 Ke Xi, 1 and Xiuming Yao 2 1 State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources, North China Electric Power University, Beijing 102206, China 2 Department of Automation, North China Electric Power University, Baoding 071003, China Correspondence should be addressed to Xiangjie Liu; [email protected] Received 10 August 2013; Accepted 20 September 2013 Academic Editor: Zhiguang Feng Copyright © 2013 Xiangjie Liu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Considering the load frequency control (LFC) of large-scale power system, a robust distributed model predictive control (RDMPC) is presented. e system uncertainty according to power system parameter variation alone with the generation rate constraints (GRC) is included in the synthesis procedure. e entire power system is composed of several control areas, and the problem is formulated as convex optimization problem with linear matrix inequalities (LMI) that can be solved efficiently. It minimizes an upper bound on a robust performance objective for each subsystem. Simulation results show good dynamic response and robustness in the presence of power system dynamic uncertainties. 1. Introduction e load frequency control (LFC) has long been a much concerned research interest for power system engineers over the past forty years [1]. In modern power system, undesirable frequency and scheduled tie-line power changes in multiarea power system are a direct result of the imbalance between generated power and system demand plus associated system losses. e main objectives of the LFC are to keep the system frequency at the scheduled value and regulate the generator units to make the area control error tend to zero under the continuous adjustment of active power, so that the generation of the entire system and the load power well match. In a practical power system, there exist different kinds of uncertainties, such as changes in parameter. And each control area contains various disturbances due to increased complexity, system modeling errors, and changing power system structure. us the robustness must be taken into theoretical consideration in the LFC design procedure to promise high power quality. A fixed controller based on classical theory is not very suitable for the LFC problem. It is necessary that a flexible controller should be developed [2–4]. Robust LFC was early designed based on the Riccati equation approach [5], which is simple and effective and can ensure the overall system to be asymptotically stable for all admissible uncertainties. Motivated by the large uncertainty in dynamic models of power system components and their interconnections, paper [6] proposes a physically motivated passivity objective as a means to achieve effective closed-loop control. Recently, robust LFC can be realized using linear matrix inequalities [7], fuzzy logic [8], neural networks [9], and genetic algorithms [10]. Model predictive control (MPC) has been an attracting method for power system LFC, which can perform an optimi- zation procedure to calculate optimal control actions within the realistic power system constrains. In LFC research, there is the practical limit on the rate of change in the generating power, called the generation rate constraints (GRC), which can result in the LFC to be a constraint optimal problem. Traditional MPC is unable to explicitly incorporate plant uncertainty. us, robust MPC has been well developed recently [11, 12]. Most existing MPCs assume that all subsystems are identical, which is not the case of actual power systems. Sub- sequently, a number of decentralized/distributed load fre- quency controllers were developed to eliminate the above
Transcript of Research Article Robust Distributed Model...
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 468168 10 pageshttpdxdoiorg1011552013468168
Research ArticleRobust Distributed Model Predictive Load Frequency Control ofInterconnected Power System
Xiangjie Liu1 Huiyun Nong1 Ke Xi1 and Xiuming Yao2
1 State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources North China Electric Power UniversityBeijing 102206 China
2Department of Automation North China Electric Power University Baoding 071003 China
Correspondence should be addressed to Xiangjie Liu liuxjncepueducn
Received 10 August 2013 Accepted 20 September 2013
Academic Editor Zhiguang Feng
Copyright copy 2013 Xiangjie Liu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Considering the load frequency control (LFC) of large-scale power system a robust distributedmodel predictive control (RDMPC)is presented The system uncertainty according to power system parameter variation alone with the generation rate constraints(GRC) is included in the synthesis procedure The entire power system is composed of several control areas and the problemis formulated as convex optimization problem with linear matrix inequalities (LMI) that can be solved efficiently It minimizes anupper bound on a robust performance objective for each subsystem Simulation results show good dynamic response and robustnessin the presence of power system dynamic uncertainties
1 Introduction
The load frequency control (LFC) has long been a muchconcerned research interest for power system engineers overthe past forty years [1] In modern power system undesirablefrequency and scheduled tie-line power changes in multiareapower system are a direct result of the imbalance betweengenerated power and system demand plus associated systemlosses The main objectives of the LFC are to keep the systemfrequency at the scheduled value and regulate the generatorunits to make the area control error tend to zero under thecontinuous adjustment of active power so that the generationof the entire system and the load power well match
In a practical power system there exist different kindsof uncertainties such as changes in parameter And eachcontrol area contains various disturbances due to increasedcomplexity system modeling errors and changing powersystem structure Thus the robustness must be taken intotheoretical consideration in the LFC design procedure topromise high power quality A fixed controller based onclassical theory is not very suitable for the LFC problem Itis necessary that a flexible controller should be developed[2ndash4] Robust LFC was early designed based on the Riccati
equation approach [5] which is simple and effective and canensure the overall system to be asymptotically stable for alladmissible uncertainties Motivated by the large uncertaintyin dynamic models of power system components and theirinterconnections paper [6] proposes a physically motivatedpassivity objective as a means to achieve effective closed-loopcontrol Recently robust LFC can be realized using linearmatrix inequalities [7] fuzzy logic [8] neural networks [9]and genetic algorithms [10]
Model predictive control (MPC) has been an attractingmethod for power systemLFCwhich can perform an optimi-zation procedure to calculate optimal control actions withinthe realistic power system constrains In LFC research thereis the practical limit on the rate of change in the generatingpower called the generation rate constraints (GRC) whichcan result in the LFC to be a constraint optimal problemTraditional MPC is unable to explicitly incorporate plantuncertainty Thus robust MPC has been well developedrecently [11 12]
Most existing MPCs assume that all subsystems areidentical which is not the case of actual power systems Sub-sequently a number of decentralizeddistributed load fre-quency controllers were developed to eliminate the above
2 Mathematical Problems in Engineering
drawback In [13] the distributed model predictive control(DMPC) is used in LFC which offers an effective meansof achieving the desired controller coordination and per-formance improvements A decentralized MPC frameworkfor multiarea power system has been presented in [14]Accordingly the robustness of DMPC strategies to modelerrors has been identified as a key factor for the successfulapplication of DMPC [15]
In this paper a robust distributed MPC (RDMPC)strategy for load frequency control in interconnected powersystem is presented The entire power system is composedof several subareas and the problem is formulated as convexoptimization problem with linear matrix inequalities (LMI)that can be solved efficiently using the algorithmThemethodshows good dynamic response and robustness in the presenceof power system model dynamic uncertainties
2 Mathematical Model of Power System
The interconnected power system consists of at least twocontrol areas connected by tie lines Usually the subsystemcontains thermal power system hydro power system nuclearpower system and renewable power system inwhich thermalpower system and hydro power system generally participatein load frequency control Figures 1 and 2 show respectivelythe structures of thermal power plant and hydro power plantin power system LFC The original model has been given in[16] Comparing to [16] the model in this article containsthe reheater part which is quite common in modern thermalpower plant Each control area has its own controller Thevariables and parameters are given in Table 1
When load change happens in one area all the intercon-nected areas will be affected and the controllers act to adjustthe frequency deviation and tie-line active power to returnto steady state The LFC using RDMPC will be applied to thewhole control areas
The time-varying linearized mathematical model of ther-mal andhydro plant used in interconnected power systemcanbe described as
x119894 (119905) = A
119894119894 (119905) x119894 (119905)
+ sum
119895
A119894119895 (119905) x119895 (119905) + B
119894119894 (119905) u119894 (119905) + F
119894119894 (119905) d119894 (119905)
(1)
where 119894 represents the control area x119894isin R119899119894 u
119894isin R119898119894 and
d119894isin R119911119894 represent the state input and disturbance vector in
the 119894rsquos subsystem respectively x119895isin R119899119895 is a state vector of the
neighbor systemDefine the area control error (ACE) to be
ACE119894= y119894 (119905) = C
119894119894x119894 (119905) = 119861119894
Δ119891
119894 (119905) + Δ119875tie119894 (119905) (2)
where y119894isin RV119894 represents system output signal Matrices in
(1) and (2) have dimensions
A119894119894isin R
119899119894times119899119894 A
119894119895isin R
119899119894times119899119895 B
119894119894isin R
119899119894times119898119894
F119894119894isin R
119899119894times119911119894 C
119894119894isin R
V119894times119899119894
(3)
In Figure 1 the state variable in the thermal power systemis
x119894 (119905) = [
Δ119891
119894 (119905) Δ119875tie119894 (119905) Δ119875119892119894 (119905) Δ119883119892119894 (119905) Δ119875119903119894 (119905)]
119879
(4)
while the state variable in the hydro power system is
x119894 (119905) = [
Δ119891
119894 (119905) Δ119875tie119894 (119905) Δ119875119892119894 (119905) Δ119883119892119894 (119905) Δ119883119892ℎ119894 (119905)]
119879
(5)
The control signal and disturbance in both the thermalpower system and the hydro power system are as follows
u119894 (119905) = Δ119875119888119894 (
119905) d119894 (119905) = Δ119875119889119894 (
119905) (6)
The state control and disturbance matrix in thermalpower system are
A119894119894=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
minus
1
119879
119901119894
minus
119870
119901119894
119879
119901119894
119870
119901119894
119879
119901119894
0 0
sum
119895 = 119894
119879
1199041198941198950 0 0 0
0 0 minus
1
119879
119879119894
0
1
119879
119879119894
minus
1
119879
119866119894119877
119894
0 0 minus
1
119879
119866119894
0
minus
119870
119903119894
119877
119894119879
119866119894
0 0
1
119879
119903119894
minus
119870
119903119894
119879
119866119894
minus
1
119879
119903119894
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
B119894119894=
[
[
[
[
[
[
[
[
0
0
0
1
119879
119866119894
0
]
]
]
]
]
]
]
]
F119894119894=
[
[
[
[
[
[
[
[
minus
119870
119901119894
119879
119901119894
0
0
0
0
]
]
]
]
]
]
]
]
(7)
while the state control and disturbance matrix in hydropower system are
A119894119894=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
minus
1
119879
119875119894
minus
119870
119875119894
119879
119875119894
119870
119875119894
119879
119875119894
0 0
sum
119895 = 119894
119879
1199041198941198950 0 0 0
2120572 0 minus
2
119879
119882119894
2120581 2120573
minus120572 0 0 minus
1
119879
2119894
minus120573
minus
1
119879
1119894119877
119894
0 0 0 minus
1
119879
1119894
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
B119894119894=
[
[
[
[
[
[
[
[
0
0
minus2119877
119894120573
119877
119894120573
1
119879
1119894
]
]
]
]
]
]
]
]
F119894119894=
[
[
[
[
[
[
[
[
minus
119870
119875119894
119879
119875119894
0
0
0
0
]
]
]
]
]
]
]
]
(8)
Mathematical Problems in Engineering 3
Kpi
1 + sTpi
Bi
1
Ri
+
+ + +MPC
ui minus
minus
minus1
1 + sTGi
ΔXgi
Δfi
1
1 + sTTi
ΔPdi
ΔPgiΔPriTri1 + sKri
Tri1 + s
ACEi
ΔPtie i
Tsij
s
Figure 1 The block diagram of thermal power plant in area 119894
1
1 + sT1i
ΔXghi 1 + sTRi
1 + sT2i
ΔXgi 1 minus sTWi
1 + 05sTWi
ΔPgi
ΔPdi
Δfi
sumjnei
(Δfi minus Δfj)
1+ pisT
Kpi
ΔPtie i
ACEi
Tsij
s
+
+
Bi
MPC
1
Ri
+
uiminus
+minus
minus
Figure 2 The block diagram of hydro power plant in area 119894
where 120572 = 119879
119877119894119879
1119894119879
2119894119877
119894 120573 = (119879
119877119894minus 119879
1119894)119879
1119894119879
2119894 120581 = (119879
2119894+
119879
119882119894)119879
2119894119879
119882119894
Here 119860119894119895have 5 times 5 dimensions All their elements are
equal to zero except for the element at position (1 2) whichis equal to minus119879
119904119894119895
For the whole power system the state-space equation isas follows
x (119905) = A (119905) 119909 (119905) + B (119905) 119906 (119905) + F (119905) 119889 (119905)
y (119905) = C (119905) 119909 (119905) (9)
where
x (119905) =[
[
[
[
[
x1 (119905)
x2 (119905)
x119872 (119905)
]
]
]
]
]
u (119905) =[
[
[
[
[
u1 (119905)
u2 (119905)
u119872 (119905)
]
]
]
]
]
d (119905) =[
[
[
[
[
d1 (119905)
d2 (119905)
d119872 (119905)
]
]
]
]
]
y (119905) =[
[
[
[
[
y1 (119905)
y2 (119905)
y119872 (119905)
]
]
]
]
]
(10)
This is a general continuous-time linear system withadded disturbance 119872 is the number of control areas of theinterconnected power systemAfter using the zero-order hold(ZOH) discretization method each control arearsquos distributeddiscrete-time linear model is expressed as follows
119909
119894 (119896 + 1) =
119860
119894119894 (119896) 119909119894 (
119896) +
119861
119894119894 (119896) 119906119894 (
119896)
+
119872
sum
119895 = 119894
(
119860
119894119895 (119896) 119909119895 (
119896) +
119861
119894119895 (119896) 119906119895 (
119896))
119910
119894 (119896) =
119862
119894119894119909
119894 (119896)
(11)
From (11) the polytopic model of each control area is
[
119860
119894119894 (119896)
119861
119894119894 (119896) sdot sdot sdot
119860
119894119895 (119896)
119861
119894119895 (119896) sdot sdot sdot ]
=
119871
sum
ℓ=1
120573
ℓ[
119860
(ℓ)
119894119894
119861
(ℓ)
119894119894sdot sdot sdot
119860
(ℓ)
119894119895
119861
(ℓ)
119894119895sdot sdot sdot ] isin Ω
forall119895 isin 1 119872 119895 = 119894
(12)
4 Mathematical Problems in Engineering
Table 1 Variables and parameters used in thermal and hydro power plant
Parametervariable Description UnitΔ119891 (119905) Frequency deviation HzΔ119875
119892(119905) Generator output power deviation puMW
Δ119883
119892(119905) Governor valve position deviation pu
Δ119875
119903(119905) Reheater output deviation pu
Δ119883
119892ℎ(119905) Governor valve servomotor position deviation pu
Δ119875tie (119905) Tie-line active power deviation puMWΔ119875
119889(119905) Load disturbance puMW
Δ120575 (119905) Rotor angle deviation rad119870
119875Power system gain HzpuMW
119870
119903Reheater gain pu
119879
119875Power system time constant s
119879
119882Water starting time s
119879
1 119879
2 119879
119877Hydrogovernor time constants s
119879
119866Thermal governor time constant s
119879
119879Turbine time constant s
119879
119903Reheater time constant s
119879
119904Interconnection gain between CAs puMW
119861 Frequency bias factor puMWHz119877 Speed droop due to governor action HzpuMWACE Area control error puMW
119860
119894119894(119896) 119861
119894119894(119896) 119860
119894119895(119896) 119861
119894119895(119896) and
119862
119894119894are the relative
matrices in the discrete-time model (11) Ω is the modelparameter uncertainty set 120573
ℓrsquos are used to represent a convex
combination of the model vertices since the convex hull(the polytope) is the extreme model vertices Each vertex ℓcorresponds to a linear model The states are assumed to beavailable
3 Robust Distributed Model PredictiveControl Algorithm
Considering the distributed discrete-time power systemmodel (11) the min-max problem to be solved for eachsubsystem is expressed as
min119906119894(119896+119897|119896)
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) (13)
st 1003816100381610038161003816
119906
119894 (119896 + 119897 | 119896)
1003816
1003816
1003816
1003816
le 119906
max119894 119897 ge 0 (14)
where 119869119894(119896) is an object function for subsystem 119894 to guarantee
the cooperation of subsystem controllers defined as
119869
119894 (119896) =
infin
sum
119897=0
[119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)]
+
119872
sum
119895 = 119894
infin
sum
119897=0
[119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+ 119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896)]
(15)
where 119909119894(119896 + 119897 | 119896) and 119906
119894(119896 + 119897 | 119896) are the predicted state and
input variables for the 119894th subsystem at time instant 119896+119897 119897 ge 0based on data at time 119896 119878
119894 119877119894 119878119895 and 119877
119895are the weighting
matricesThe maximization is to choose time-varying model
[
119860
119894119894(119896+119897)
119861
119894119894(119896+119897) sdot sdot sdot
119860
119894119895(119896+119897)
119861
119894119895(119896+119897) sdot sdot sdot ] in the uncertainty
set Ω to get the worst situation of 119869119894(119896) and this worst
situation will be minimized on the current and the futurehorizons
To solve the optimal problem (13) it is necessary to findan upper bound of the object function (15) Considering thequadratic function
119881
119894 (119909) = 119909
119879119875
119894119909 119875
119894gt 0 (16)
where 119909 = [11990910158401119909
1015840
2sdot sdot sdot 119909
1015840
119872]
1015840 For all the subsystem 119894 119881119894(119909)
should satisfy the following stability constraint
119881
119894 (119909 (119896 + 119897 + 1 | 119896)) minus 119881119894 (
119909 (119896 + 119897 | 119896))
le minus [119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)
+
119872
sum
119895 = 119894
(119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896))]
(17)
For 119897 = 0 1 infin the accumulation of (17) is
119881
119894 (119909 (119896 | 119896)) ge 119869119894 (
119896) (18)
Mathematical Problems in Engineering 5
So the upper bound of object function can be proved tobe
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) (19)
A state-feedback law is sought for each subsystem 119894 asfollows
119906
119894 (119896 + 119897 | 119896) = 119891119894119894
119909
119894 (119896 + 119897 | 119896) +
119872
sum
119895 = 119894
119891
119894119895119909
119895 (119896 + 119897 | 119896)
= 119891
119894119909 (119896 + 119897 | 119896)
(20)
where 119891119894= [1198911198941
119891
1198942sdot sdot sdot 119891
119894119872]When solving optimization problem of the subsystem 119894
the state-feedback law of the neighboring subsystem 119895 (119895 = 119894)
is expressed as
119906
119895 (119896 + 119897 | 119896) = 119891
lowast
119895119895119909
119895 (119896 + 119897 | 119896) +
119872
sum
119895 = 119904
119891
lowast
119895119904119909
119904 (119896 + 119897 | 119896)
= 119891
lowast
119895119909 (119896 + 119897 | 119896)
(21)
where 119891lowast119895= [119891
lowast
1198951119891
lowast
1198952sdot sdot sdot 119891
lowast
119895119872]
The RDMPC algorithm will be redefined using state-feedback law (20) to minimize the upper bound
min119906119894(119896+119897|119896)
119881
119894 (119909 (119896 | 119896)) = min
119891119894
119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) 119875
119894gt 0
(22)
For the whole power system the expression of 119909 is
119909 (119896 + 1) =
[
[
[
[
[
119909
1 (119896 + 1)
119909
2 (119896 + 1)
119909
119872 (119896 + 1)
]
]
]
]
]
=
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
[
[
[
[
[
119909
1 (119896)
119909
2 (119896)
119909
119872 (119896)
]
]
]
]
]
+
[
[
[
[
[
119861
11 (119896)
119861
21 (119896)
119861
1198721 (119896)
]
]
]
]
]
119906
1 (119896) +
[
[
[
[
[
119861
12 (119896)
119861
22 (119896)
119861
1198722 (119896)
]
]
]
]
]
119906
2 (119896)
+ sdot sdot sdot +
[
[
[
[
[
119861
1119872 (119896)
119861
2119872 (119896)
119861
119872119872 (119896)
]
]
]
]
]
119906
119872 (119896)
(23)
Define
119860 (119896) =
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
(24)
119861
119894 (119896) =
[
[
[
[
[
119861
1119894 (119896)
119861
2119894 (119896)
119861
119872119894 (119896)
]
]
]
]
]
(25)
Using (20) and (21) the state (23) can be simplified as
119909 (119896 + 1) = [119860 (119896) + 119861119894 (119896) 119891119894
] 119909 (119896) (26)
in which 119860(119896) = 119860(119896) + sum119872119895 = 119894
119861
119895(119896)119891
lowast
119895
The robust stability constraint in (17) becomes
[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
]
1015840
times 119875
119894[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
] minus 119875
119894
le minus(119878
119894+
119872
sum
119895 = 119894
119891
lowast1015840
119895119877
119895119891
lowast
119895+ 119891
1015840
119894119877
119894119891
119894)
(27)
where
119878
119894=
[
[
[
[
119878
1
119878
2
d119878
119872
]
]
]
]
(28)
By defining an upper bound
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) le 120574119894 (29)
The optimal problem (22) is equivalent to
min120574119894 119875119894
120574
119894
st 119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) le 120574119894
(30)
Substituting 119875119894= 120574
119894119876
minus1
119894gt 0 119884
119894= 119891
119894119876
119894 with the input
constraints given in (13) and the stability constraint (27)followed by a Schur complement decomposition the min-imization of 119869
119894(119896) can be replaced by the minimization
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
drawback In [13] the distributed model predictive control(DMPC) is used in LFC which offers an effective meansof achieving the desired controller coordination and per-formance improvements A decentralized MPC frameworkfor multiarea power system has been presented in [14]Accordingly the robustness of DMPC strategies to modelerrors has been identified as a key factor for the successfulapplication of DMPC [15]
In this paper a robust distributed MPC (RDMPC)strategy for load frequency control in interconnected powersystem is presented The entire power system is composedof several subareas and the problem is formulated as convexoptimization problem with linear matrix inequalities (LMI)that can be solved efficiently using the algorithmThemethodshows good dynamic response and robustness in the presenceof power system model dynamic uncertainties
2 Mathematical Model of Power System
The interconnected power system consists of at least twocontrol areas connected by tie lines Usually the subsystemcontains thermal power system hydro power system nuclearpower system and renewable power system inwhich thermalpower system and hydro power system generally participatein load frequency control Figures 1 and 2 show respectivelythe structures of thermal power plant and hydro power plantin power system LFC The original model has been given in[16] Comparing to [16] the model in this article containsthe reheater part which is quite common in modern thermalpower plant Each control area has its own controller Thevariables and parameters are given in Table 1
When load change happens in one area all the intercon-nected areas will be affected and the controllers act to adjustthe frequency deviation and tie-line active power to returnto steady state The LFC using RDMPC will be applied to thewhole control areas
The time-varying linearized mathematical model of ther-mal andhydro plant used in interconnected power systemcanbe described as
x119894 (119905) = A
119894119894 (119905) x119894 (119905)
+ sum
119895
A119894119895 (119905) x119895 (119905) + B
119894119894 (119905) u119894 (119905) + F
119894119894 (119905) d119894 (119905)
(1)
where 119894 represents the control area x119894isin R119899119894 u
119894isin R119898119894 and
d119894isin R119911119894 represent the state input and disturbance vector in
the 119894rsquos subsystem respectively x119895isin R119899119895 is a state vector of the
neighbor systemDefine the area control error (ACE) to be
ACE119894= y119894 (119905) = C
119894119894x119894 (119905) = 119861119894
Δ119891
119894 (119905) + Δ119875tie119894 (119905) (2)
where y119894isin RV119894 represents system output signal Matrices in
(1) and (2) have dimensions
A119894119894isin R
119899119894times119899119894 A
119894119895isin R
119899119894times119899119895 B
119894119894isin R
119899119894times119898119894
F119894119894isin R
119899119894times119911119894 C
119894119894isin R
V119894times119899119894
(3)
In Figure 1 the state variable in the thermal power systemis
x119894 (119905) = [
Δ119891
119894 (119905) Δ119875tie119894 (119905) Δ119875119892119894 (119905) Δ119883119892119894 (119905) Δ119875119903119894 (119905)]
119879
(4)
while the state variable in the hydro power system is
x119894 (119905) = [
Δ119891
119894 (119905) Δ119875tie119894 (119905) Δ119875119892119894 (119905) Δ119883119892119894 (119905) Δ119883119892ℎ119894 (119905)]
119879
(5)
The control signal and disturbance in both the thermalpower system and the hydro power system are as follows
u119894 (119905) = Δ119875119888119894 (
119905) d119894 (119905) = Δ119875119889119894 (
119905) (6)
The state control and disturbance matrix in thermalpower system are
A119894119894=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
minus
1
119879
119901119894
minus
119870
119901119894
119879
119901119894
119870
119901119894
119879
119901119894
0 0
sum
119895 = 119894
119879
1199041198941198950 0 0 0
0 0 minus
1
119879
119879119894
0
1
119879
119879119894
minus
1
119879
119866119894119877
119894
0 0 minus
1
119879
119866119894
0
minus
119870
119903119894
119877
119894119879
119866119894
0 0
1
119879
119903119894
minus
119870
119903119894
119879
119866119894
minus
1
119879
119903119894
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
B119894119894=
[
[
[
[
[
[
[
[
0
0
0
1
119879
119866119894
0
]
]
]
]
]
]
]
]
F119894119894=
[
[
[
[
[
[
[
[
minus
119870
119901119894
119879
119901119894
0
0
0
0
]
]
]
]
]
]
]
]
(7)
while the state control and disturbance matrix in hydropower system are
A119894119894=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
minus
1
119879
119875119894
minus
119870
119875119894
119879
119875119894
119870
119875119894
119879
119875119894
0 0
sum
119895 = 119894
119879
1199041198941198950 0 0 0
2120572 0 minus
2
119879
119882119894
2120581 2120573
minus120572 0 0 minus
1
119879
2119894
minus120573
minus
1
119879
1119894119877
119894
0 0 0 minus
1
119879
1119894
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
B119894119894=
[
[
[
[
[
[
[
[
0
0
minus2119877
119894120573
119877
119894120573
1
119879
1119894
]
]
]
]
]
]
]
]
F119894119894=
[
[
[
[
[
[
[
[
minus
119870
119875119894
119879
119875119894
0
0
0
0
]
]
]
]
]
]
]
]
(8)
Mathematical Problems in Engineering 3
Kpi
1 + sTpi
Bi
1
Ri
+
+ + +MPC
ui minus
minus
minus1
1 + sTGi
ΔXgi
Δfi
1
1 + sTTi
ΔPdi
ΔPgiΔPriTri1 + sKri
Tri1 + s
ACEi
ΔPtie i
Tsij
s
Figure 1 The block diagram of thermal power plant in area 119894
1
1 + sT1i
ΔXghi 1 + sTRi
1 + sT2i
ΔXgi 1 minus sTWi
1 + 05sTWi
ΔPgi
ΔPdi
Δfi
sumjnei
(Δfi minus Δfj)
1+ pisT
Kpi
ΔPtie i
ACEi
Tsij
s
+
+
Bi
MPC
1
Ri
+
uiminus
+minus
minus
Figure 2 The block diagram of hydro power plant in area 119894
where 120572 = 119879
119877119894119879
1119894119879
2119894119877
119894 120573 = (119879
119877119894minus 119879
1119894)119879
1119894119879
2119894 120581 = (119879
2119894+
119879
119882119894)119879
2119894119879
119882119894
Here 119860119894119895have 5 times 5 dimensions All their elements are
equal to zero except for the element at position (1 2) whichis equal to minus119879
119904119894119895
For the whole power system the state-space equation isas follows
x (119905) = A (119905) 119909 (119905) + B (119905) 119906 (119905) + F (119905) 119889 (119905)
y (119905) = C (119905) 119909 (119905) (9)
where
x (119905) =[
[
[
[
[
x1 (119905)
x2 (119905)
x119872 (119905)
]
]
]
]
]
u (119905) =[
[
[
[
[
u1 (119905)
u2 (119905)
u119872 (119905)
]
]
]
]
]
d (119905) =[
[
[
[
[
d1 (119905)
d2 (119905)
d119872 (119905)
]
]
]
]
]
y (119905) =[
[
[
[
[
y1 (119905)
y2 (119905)
y119872 (119905)
]
]
]
]
]
(10)
This is a general continuous-time linear system withadded disturbance 119872 is the number of control areas of theinterconnected power systemAfter using the zero-order hold(ZOH) discretization method each control arearsquos distributeddiscrete-time linear model is expressed as follows
119909
119894 (119896 + 1) =
119860
119894119894 (119896) 119909119894 (
119896) +
119861
119894119894 (119896) 119906119894 (
119896)
+
119872
sum
119895 = 119894
(
119860
119894119895 (119896) 119909119895 (
119896) +
119861
119894119895 (119896) 119906119895 (
119896))
119910
119894 (119896) =
119862
119894119894119909
119894 (119896)
(11)
From (11) the polytopic model of each control area is
[
119860
119894119894 (119896)
119861
119894119894 (119896) sdot sdot sdot
119860
119894119895 (119896)
119861
119894119895 (119896) sdot sdot sdot ]
=
119871
sum
ℓ=1
120573
ℓ[
119860
(ℓ)
119894119894
119861
(ℓ)
119894119894sdot sdot sdot
119860
(ℓ)
119894119895
119861
(ℓ)
119894119895sdot sdot sdot ] isin Ω
forall119895 isin 1 119872 119895 = 119894
(12)
4 Mathematical Problems in Engineering
Table 1 Variables and parameters used in thermal and hydro power plant
Parametervariable Description UnitΔ119891 (119905) Frequency deviation HzΔ119875
119892(119905) Generator output power deviation puMW
Δ119883
119892(119905) Governor valve position deviation pu
Δ119875
119903(119905) Reheater output deviation pu
Δ119883
119892ℎ(119905) Governor valve servomotor position deviation pu
Δ119875tie (119905) Tie-line active power deviation puMWΔ119875
119889(119905) Load disturbance puMW
Δ120575 (119905) Rotor angle deviation rad119870
119875Power system gain HzpuMW
119870
119903Reheater gain pu
119879
119875Power system time constant s
119879
119882Water starting time s
119879
1 119879
2 119879
119877Hydrogovernor time constants s
119879
119866Thermal governor time constant s
119879
119879Turbine time constant s
119879
119903Reheater time constant s
119879
119904Interconnection gain between CAs puMW
119861 Frequency bias factor puMWHz119877 Speed droop due to governor action HzpuMWACE Area control error puMW
119860
119894119894(119896) 119861
119894119894(119896) 119860
119894119895(119896) 119861
119894119895(119896) and
119862
119894119894are the relative
matrices in the discrete-time model (11) Ω is the modelparameter uncertainty set 120573
ℓrsquos are used to represent a convex
combination of the model vertices since the convex hull(the polytope) is the extreme model vertices Each vertex ℓcorresponds to a linear model The states are assumed to beavailable
3 Robust Distributed Model PredictiveControl Algorithm
Considering the distributed discrete-time power systemmodel (11) the min-max problem to be solved for eachsubsystem is expressed as
min119906119894(119896+119897|119896)
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) (13)
st 1003816100381610038161003816
119906
119894 (119896 + 119897 | 119896)
1003816
1003816
1003816
1003816
le 119906
max119894 119897 ge 0 (14)
where 119869119894(119896) is an object function for subsystem 119894 to guarantee
the cooperation of subsystem controllers defined as
119869
119894 (119896) =
infin
sum
119897=0
[119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)]
+
119872
sum
119895 = 119894
infin
sum
119897=0
[119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+ 119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896)]
(15)
where 119909119894(119896 + 119897 | 119896) and 119906
119894(119896 + 119897 | 119896) are the predicted state and
input variables for the 119894th subsystem at time instant 119896+119897 119897 ge 0based on data at time 119896 119878
119894 119877119894 119878119895 and 119877
119895are the weighting
matricesThe maximization is to choose time-varying model
[
119860
119894119894(119896+119897)
119861
119894119894(119896+119897) sdot sdot sdot
119860
119894119895(119896+119897)
119861
119894119895(119896+119897) sdot sdot sdot ] in the uncertainty
set Ω to get the worst situation of 119869119894(119896) and this worst
situation will be minimized on the current and the futurehorizons
To solve the optimal problem (13) it is necessary to findan upper bound of the object function (15) Considering thequadratic function
119881
119894 (119909) = 119909
119879119875
119894119909 119875
119894gt 0 (16)
where 119909 = [11990910158401119909
1015840
2sdot sdot sdot 119909
1015840
119872]
1015840 For all the subsystem 119894 119881119894(119909)
should satisfy the following stability constraint
119881
119894 (119909 (119896 + 119897 + 1 | 119896)) minus 119881119894 (
119909 (119896 + 119897 | 119896))
le minus [119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)
+
119872
sum
119895 = 119894
(119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896))]
(17)
For 119897 = 0 1 infin the accumulation of (17) is
119881
119894 (119909 (119896 | 119896)) ge 119869119894 (
119896) (18)
Mathematical Problems in Engineering 5
So the upper bound of object function can be proved tobe
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) (19)
A state-feedback law is sought for each subsystem 119894 asfollows
119906
119894 (119896 + 119897 | 119896) = 119891119894119894
119909
119894 (119896 + 119897 | 119896) +
119872
sum
119895 = 119894
119891
119894119895119909
119895 (119896 + 119897 | 119896)
= 119891
119894119909 (119896 + 119897 | 119896)
(20)
where 119891119894= [1198911198941
119891
1198942sdot sdot sdot 119891
119894119872]When solving optimization problem of the subsystem 119894
the state-feedback law of the neighboring subsystem 119895 (119895 = 119894)
is expressed as
119906
119895 (119896 + 119897 | 119896) = 119891
lowast
119895119895119909
119895 (119896 + 119897 | 119896) +
119872
sum
119895 = 119904
119891
lowast
119895119904119909
119904 (119896 + 119897 | 119896)
= 119891
lowast
119895119909 (119896 + 119897 | 119896)
(21)
where 119891lowast119895= [119891
lowast
1198951119891
lowast
1198952sdot sdot sdot 119891
lowast
119895119872]
The RDMPC algorithm will be redefined using state-feedback law (20) to minimize the upper bound
min119906119894(119896+119897|119896)
119881
119894 (119909 (119896 | 119896)) = min
119891119894
119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) 119875
119894gt 0
(22)
For the whole power system the expression of 119909 is
119909 (119896 + 1) =
[
[
[
[
[
119909
1 (119896 + 1)
119909
2 (119896 + 1)
119909
119872 (119896 + 1)
]
]
]
]
]
=
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
[
[
[
[
[
119909
1 (119896)
119909
2 (119896)
119909
119872 (119896)
]
]
]
]
]
+
[
[
[
[
[
119861
11 (119896)
119861
21 (119896)
119861
1198721 (119896)
]
]
]
]
]
119906
1 (119896) +
[
[
[
[
[
119861
12 (119896)
119861
22 (119896)
119861
1198722 (119896)
]
]
]
]
]
119906
2 (119896)
+ sdot sdot sdot +
[
[
[
[
[
119861
1119872 (119896)
119861
2119872 (119896)
119861
119872119872 (119896)
]
]
]
]
]
119906
119872 (119896)
(23)
Define
119860 (119896) =
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
(24)
119861
119894 (119896) =
[
[
[
[
[
119861
1119894 (119896)
119861
2119894 (119896)
119861
119872119894 (119896)
]
]
]
]
]
(25)
Using (20) and (21) the state (23) can be simplified as
119909 (119896 + 1) = [119860 (119896) + 119861119894 (119896) 119891119894
] 119909 (119896) (26)
in which 119860(119896) = 119860(119896) + sum119872119895 = 119894
119861
119895(119896)119891
lowast
119895
The robust stability constraint in (17) becomes
[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
]
1015840
times 119875
119894[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
] minus 119875
119894
le minus(119878
119894+
119872
sum
119895 = 119894
119891
lowast1015840
119895119877
119895119891
lowast
119895+ 119891
1015840
119894119877
119894119891
119894)
(27)
where
119878
119894=
[
[
[
[
119878
1
119878
2
d119878
119872
]
]
]
]
(28)
By defining an upper bound
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) le 120574119894 (29)
The optimal problem (22) is equivalent to
min120574119894 119875119894
120574
119894
st 119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) le 120574119894
(30)
Substituting 119875119894= 120574
119894119876
minus1
119894gt 0 119884
119894= 119891
119894119876
119894 with the input
constraints given in (13) and the stability constraint (27)followed by a Schur complement decomposition the min-imization of 119869
119894(119896) can be replaced by the minimization
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Kpi
1 + sTpi
Bi
1
Ri
+
+ + +MPC
ui minus
minus
minus1
1 + sTGi
ΔXgi
Δfi
1
1 + sTTi
ΔPdi
ΔPgiΔPriTri1 + sKri
Tri1 + s
ACEi
ΔPtie i
Tsij
s
Figure 1 The block diagram of thermal power plant in area 119894
1
1 + sT1i
ΔXghi 1 + sTRi
1 + sT2i
ΔXgi 1 minus sTWi
1 + 05sTWi
ΔPgi
ΔPdi
Δfi
sumjnei
(Δfi minus Δfj)
1+ pisT
Kpi
ΔPtie i
ACEi
Tsij
s
+
+
Bi
MPC
1
Ri
+
uiminus
+minus
minus
Figure 2 The block diagram of hydro power plant in area 119894
where 120572 = 119879
119877119894119879
1119894119879
2119894119877
119894 120573 = (119879
119877119894minus 119879
1119894)119879
1119894119879
2119894 120581 = (119879
2119894+
119879
119882119894)119879
2119894119879
119882119894
Here 119860119894119895have 5 times 5 dimensions All their elements are
equal to zero except for the element at position (1 2) whichis equal to minus119879
119904119894119895
For the whole power system the state-space equation isas follows
x (119905) = A (119905) 119909 (119905) + B (119905) 119906 (119905) + F (119905) 119889 (119905)
y (119905) = C (119905) 119909 (119905) (9)
where
x (119905) =[
[
[
[
[
x1 (119905)
x2 (119905)
x119872 (119905)
]
]
]
]
]
u (119905) =[
[
[
[
[
u1 (119905)
u2 (119905)
u119872 (119905)
]
]
]
]
]
d (119905) =[
[
[
[
[
d1 (119905)
d2 (119905)
d119872 (119905)
]
]
]
]
]
y (119905) =[
[
[
[
[
y1 (119905)
y2 (119905)
y119872 (119905)
]
]
]
]
]
(10)
This is a general continuous-time linear system withadded disturbance 119872 is the number of control areas of theinterconnected power systemAfter using the zero-order hold(ZOH) discretization method each control arearsquos distributeddiscrete-time linear model is expressed as follows
119909
119894 (119896 + 1) =
119860
119894119894 (119896) 119909119894 (
119896) +
119861
119894119894 (119896) 119906119894 (
119896)
+
119872
sum
119895 = 119894
(
119860
119894119895 (119896) 119909119895 (
119896) +
119861
119894119895 (119896) 119906119895 (
119896))
119910
119894 (119896) =
119862
119894119894119909
119894 (119896)
(11)
From (11) the polytopic model of each control area is
[
119860
119894119894 (119896)
119861
119894119894 (119896) sdot sdot sdot
119860
119894119895 (119896)
119861
119894119895 (119896) sdot sdot sdot ]
=
119871
sum
ℓ=1
120573
ℓ[
119860
(ℓ)
119894119894
119861
(ℓ)
119894119894sdot sdot sdot
119860
(ℓ)
119894119895
119861
(ℓ)
119894119895sdot sdot sdot ] isin Ω
forall119895 isin 1 119872 119895 = 119894
(12)
4 Mathematical Problems in Engineering
Table 1 Variables and parameters used in thermal and hydro power plant
Parametervariable Description UnitΔ119891 (119905) Frequency deviation HzΔ119875
119892(119905) Generator output power deviation puMW
Δ119883
119892(119905) Governor valve position deviation pu
Δ119875
119903(119905) Reheater output deviation pu
Δ119883
119892ℎ(119905) Governor valve servomotor position deviation pu
Δ119875tie (119905) Tie-line active power deviation puMWΔ119875
119889(119905) Load disturbance puMW
Δ120575 (119905) Rotor angle deviation rad119870
119875Power system gain HzpuMW
119870
119903Reheater gain pu
119879
119875Power system time constant s
119879
119882Water starting time s
119879
1 119879
2 119879
119877Hydrogovernor time constants s
119879
119866Thermal governor time constant s
119879
119879Turbine time constant s
119879
119903Reheater time constant s
119879
119904Interconnection gain between CAs puMW
119861 Frequency bias factor puMWHz119877 Speed droop due to governor action HzpuMWACE Area control error puMW
119860
119894119894(119896) 119861
119894119894(119896) 119860
119894119895(119896) 119861
119894119895(119896) and
119862
119894119894are the relative
matrices in the discrete-time model (11) Ω is the modelparameter uncertainty set 120573
ℓrsquos are used to represent a convex
combination of the model vertices since the convex hull(the polytope) is the extreme model vertices Each vertex ℓcorresponds to a linear model The states are assumed to beavailable
3 Robust Distributed Model PredictiveControl Algorithm
Considering the distributed discrete-time power systemmodel (11) the min-max problem to be solved for eachsubsystem is expressed as
min119906119894(119896+119897|119896)
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) (13)
st 1003816100381610038161003816
119906
119894 (119896 + 119897 | 119896)
1003816
1003816
1003816
1003816
le 119906
max119894 119897 ge 0 (14)
where 119869119894(119896) is an object function for subsystem 119894 to guarantee
the cooperation of subsystem controllers defined as
119869
119894 (119896) =
infin
sum
119897=0
[119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)]
+
119872
sum
119895 = 119894
infin
sum
119897=0
[119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+ 119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896)]
(15)
where 119909119894(119896 + 119897 | 119896) and 119906
119894(119896 + 119897 | 119896) are the predicted state and
input variables for the 119894th subsystem at time instant 119896+119897 119897 ge 0based on data at time 119896 119878
119894 119877119894 119878119895 and 119877
119895are the weighting
matricesThe maximization is to choose time-varying model
[
119860
119894119894(119896+119897)
119861
119894119894(119896+119897) sdot sdot sdot
119860
119894119895(119896+119897)
119861
119894119895(119896+119897) sdot sdot sdot ] in the uncertainty
set Ω to get the worst situation of 119869119894(119896) and this worst
situation will be minimized on the current and the futurehorizons
To solve the optimal problem (13) it is necessary to findan upper bound of the object function (15) Considering thequadratic function
119881
119894 (119909) = 119909
119879119875
119894119909 119875
119894gt 0 (16)
where 119909 = [11990910158401119909
1015840
2sdot sdot sdot 119909
1015840
119872]
1015840 For all the subsystem 119894 119881119894(119909)
should satisfy the following stability constraint
119881
119894 (119909 (119896 + 119897 + 1 | 119896)) minus 119881119894 (
119909 (119896 + 119897 | 119896))
le minus [119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)
+
119872
sum
119895 = 119894
(119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896))]
(17)
For 119897 = 0 1 infin the accumulation of (17) is
119881
119894 (119909 (119896 | 119896)) ge 119869119894 (
119896) (18)
Mathematical Problems in Engineering 5
So the upper bound of object function can be proved tobe
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) (19)
A state-feedback law is sought for each subsystem 119894 asfollows
119906
119894 (119896 + 119897 | 119896) = 119891119894119894
119909
119894 (119896 + 119897 | 119896) +
119872
sum
119895 = 119894
119891
119894119895119909
119895 (119896 + 119897 | 119896)
= 119891
119894119909 (119896 + 119897 | 119896)
(20)
where 119891119894= [1198911198941
119891
1198942sdot sdot sdot 119891
119894119872]When solving optimization problem of the subsystem 119894
the state-feedback law of the neighboring subsystem 119895 (119895 = 119894)
is expressed as
119906
119895 (119896 + 119897 | 119896) = 119891
lowast
119895119895119909
119895 (119896 + 119897 | 119896) +
119872
sum
119895 = 119904
119891
lowast
119895119904119909
119904 (119896 + 119897 | 119896)
= 119891
lowast
119895119909 (119896 + 119897 | 119896)
(21)
where 119891lowast119895= [119891
lowast
1198951119891
lowast
1198952sdot sdot sdot 119891
lowast
119895119872]
The RDMPC algorithm will be redefined using state-feedback law (20) to minimize the upper bound
min119906119894(119896+119897|119896)
119881
119894 (119909 (119896 | 119896)) = min
119891119894
119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) 119875
119894gt 0
(22)
For the whole power system the expression of 119909 is
119909 (119896 + 1) =
[
[
[
[
[
119909
1 (119896 + 1)
119909
2 (119896 + 1)
119909
119872 (119896 + 1)
]
]
]
]
]
=
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
[
[
[
[
[
119909
1 (119896)
119909
2 (119896)
119909
119872 (119896)
]
]
]
]
]
+
[
[
[
[
[
119861
11 (119896)
119861
21 (119896)
119861
1198721 (119896)
]
]
]
]
]
119906
1 (119896) +
[
[
[
[
[
119861
12 (119896)
119861
22 (119896)
119861
1198722 (119896)
]
]
]
]
]
119906
2 (119896)
+ sdot sdot sdot +
[
[
[
[
[
119861
1119872 (119896)
119861
2119872 (119896)
119861
119872119872 (119896)
]
]
]
]
]
119906
119872 (119896)
(23)
Define
119860 (119896) =
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
(24)
119861
119894 (119896) =
[
[
[
[
[
119861
1119894 (119896)
119861
2119894 (119896)
119861
119872119894 (119896)
]
]
]
]
]
(25)
Using (20) and (21) the state (23) can be simplified as
119909 (119896 + 1) = [119860 (119896) + 119861119894 (119896) 119891119894
] 119909 (119896) (26)
in which 119860(119896) = 119860(119896) + sum119872119895 = 119894
119861
119895(119896)119891
lowast
119895
The robust stability constraint in (17) becomes
[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
]
1015840
times 119875
119894[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
] minus 119875
119894
le minus(119878
119894+
119872
sum
119895 = 119894
119891
lowast1015840
119895119877
119895119891
lowast
119895+ 119891
1015840
119894119877
119894119891
119894)
(27)
where
119878
119894=
[
[
[
[
119878
1
119878
2
d119878
119872
]
]
]
]
(28)
By defining an upper bound
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) le 120574119894 (29)
The optimal problem (22) is equivalent to
min120574119894 119875119894
120574
119894
st 119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) le 120574119894
(30)
Substituting 119875119894= 120574
119894119876
minus1
119894gt 0 119884
119894= 119891
119894119876
119894 with the input
constraints given in (13) and the stability constraint (27)followed by a Schur complement decomposition the min-imization of 119869
119894(119896) can be replaced by the minimization
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
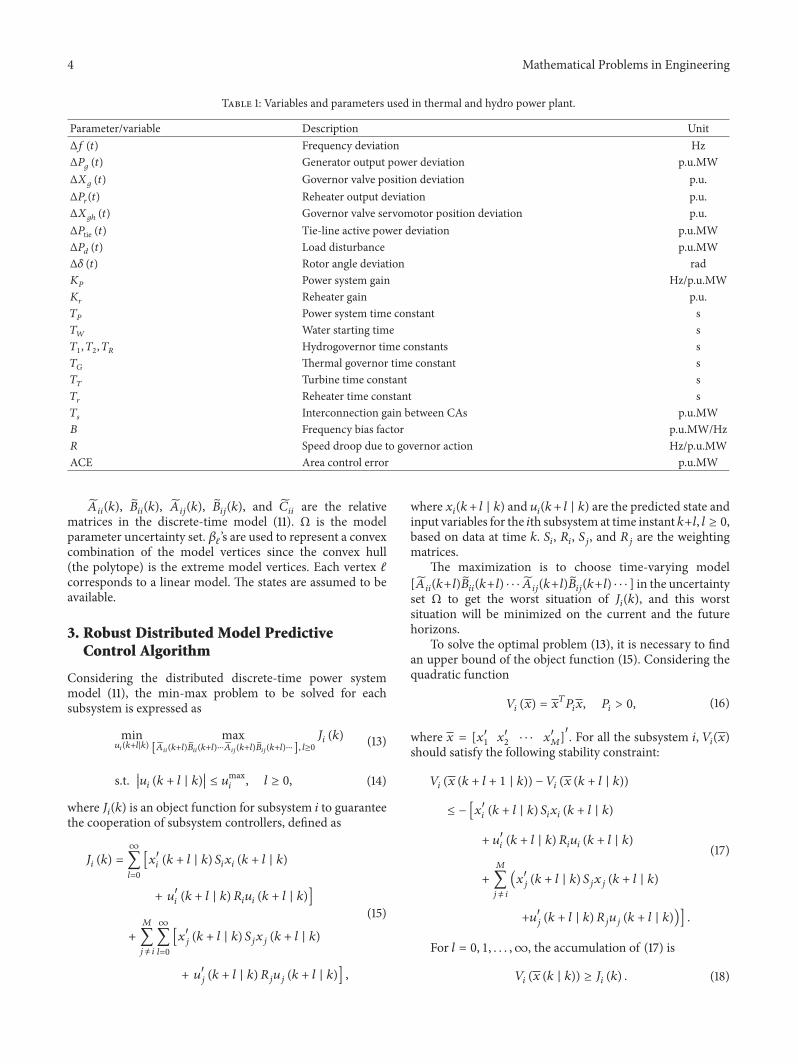
4 Mathematical Problems in Engineering
Table 1 Variables and parameters used in thermal and hydro power plant
Parametervariable Description UnitΔ119891 (119905) Frequency deviation HzΔ119875
119892(119905) Generator output power deviation puMW
Δ119883
119892(119905) Governor valve position deviation pu
Δ119875
119903(119905) Reheater output deviation pu
Δ119883
119892ℎ(119905) Governor valve servomotor position deviation pu
Δ119875tie (119905) Tie-line active power deviation puMWΔ119875
119889(119905) Load disturbance puMW
Δ120575 (119905) Rotor angle deviation rad119870
119875Power system gain HzpuMW
119870
119903Reheater gain pu
119879
119875Power system time constant s
119879
119882Water starting time s
119879
1 119879
2 119879
119877Hydrogovernor time constants s
119879
119866Thermal governor time constant s
119879
119879Turbine time constant s
119879
119903Reheater time constant s
119879
119904Interconnection gain between CAs puMW
119861 Frequency bias factor puMWHz119877 Speed droop due to governor action HzpuMWACE Area control error puMW
119860
119894119894(119896) 119861
119894119894(119896) 119860
119894119895(119896) 119861
119894119895(119896) and
119862
119894119894are the relative
matrices in the discrete-time model (11) Ω is the modelparameter uncertainty set 120573
ℓrsquos are used to represent a convex
combination of the model vertices since the convex hull(the polytope) is the extreme model vertices Each vertex ℓcorresponds to a linear model The states are assumed to beavailable
3 Robust Distributed Model PredictiveControl Algorithm
Considering the distributed discrete-time power systemmodel (11) the min-max problem to be solved for eachsubsystem is expressed as
min119906119894(119896+119897|119896)
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) (13)
st 1003816100381610038161003816
119906
119894 (119896 + 119897 | 119896)
1003816
1003816
1003816
1003816
le 119906
max119894 119897 ge 0 (14)
where 119869119894(119896) is an object function for subsystem 119894 to guarantee
the cooperation of subsystem controllers defined as
119869
119894 (119896) =
infin
sum
119897=0
[119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)]
+
119872
sum
119895 = 119894
infin
sum
119897=0
[119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+ 119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896)]
(15)
where 119909119894(119896 + 119897 | 119896) and 119906
119894(119896 + 119897 | 119896) are the predicted state and
input variables for the 119894th subsystem at time instant 119896+119897 119897 ge 0based on data at time 119896 119878
119894 119877119894 119878119895 and 119877
119895are the weighting
matricesThe maximization is to choose time-varying model
[
119860
119894119894(119896+119897)
119861
119894119894(119896+119897) sdot sdot sdot
119860
119894119895(119896+119897)
119861
119894119895(119896+119897) sdot sdot sdot ] in the uncertainty
set Ω to get the worst situation of 119869119894(119896) and this worst
situation will be minimized on the current and the futurehorizons
To solve the optimal problem (13) it is necessary to findan upper bound of the object function (15) Considering thequadratic function
119881
119894 (119909) = 119909
119879119875
119894119909 119875
119894gt 0 (16)
where 119909 = [11990910158401119909
1015840
2sdot sdot sdot 119909
1015840
119872]
1015840 For all the subsystem 119894 119881119894(119909)
should satisfy the following stability constraint
119881
119894 (119909 (119896 + 119897 + 1 | 119896)) minus 119881119894 (
119909 (119896 + 119897 | 119896))
le minus [119909
1015840
119894(119896 + 119897 | 119896) 119878119894
119909
119894 (119896 + 119897 | 119896)
+ 119906
1015840
119894(119896 + 119897 | 119896) 119877119894
119906
119894 (119896 + 119897 | 119896)
+
119872
sum
119895 = 119894
(119909
1015840
119895(119896 + 119897 | 119896) 119878119895
119909
119895 (119896 + 119897 | 119896)
+119906
1015840
119895(119896 + 119897 | 119896) 119877119895
119906
119895 (119896 + 119897 | 119896))]
(17)
For 119897 = 0 1 infin the accumulation of (17) is
119881
119894 (119909 (119896 | 119896)) ge 119869119894 (
119896) (18)
Mathematical Problems in Engineering 5
So the upper bound of object function can be proved tobe
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) (19)
A state-feedback law is sought for each subsystem 119894 asfollows
119906
119894 (119896 + 119897 | 119896) = 119891119894119894
119909
119894 (119896 + 119897 | 119896) +
119872
sum
119895 = 119894
119891
119894119895119909
119895 (119896 + 119897 | 119896)
= 119891
119894119909 (119896 + 119897 | 119896)
(20)
where 119891119894= [1198911198941
119891
1198942sdot sdot sdot 119891
119894119872]When solving optimization problem of the subsystem 119894
the state-feedback law of the neighboring subsystem 119895 (119895 = 119894)
is expressed as
119906
119895 (119896 + 119897 | 119896) = 119891
lowast
119895119895119909
119895 (119896 + 119897 | 119896) +
119872
sum
119895 = 119904
119891
lowast
119895119904119909
119904 (119896 + 119897 | 119896)
= 119891
lowast
119895119909 (119896 + 119897 | 119896)
(21)
where 119891lowast119895= [119891
lowast
1198951119891
lowast
1198952sdot sdot sdot 119891
lowast
119895119872]
The RDMPC algorithm will be redefined using state-feedback law (20) to minimize the upper bound
min119906119894(119896+119897|119896)
119881
119894 (119909 (119896 | 119896)) = min
119891119894
119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) 119875
119894gt 0
(22)
For the whole power system the expression of 119909 is
119909 (119896 + 1) =
[
[
[
[
[
119909
1 (119896 + 1)
119909
2 (119896 + 1)
119909
119872 (119896 + 1)
]
]
]
]
]
=
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
[
[
[
[
[
119909
1 (119896)
119909
2 (119896)
119909
119872 (119896)
]
]
]
]
]
+
[
[
[
[
[
119861
11 (119896)
119861
21 (119896)
119861
1198721 (119896)
]
]
]
]
]
119906
1 (119896) +
[
[
[
[
[
119861
12 (119896)
119861
22 (119896)
119861
1198722 (119896)
]
]
]
]
]
119906
2 (119896)
+ sdot sdot sdot +
[
[
[
[
[
119861
1119872 (119896)
119861
2119872 (119896)
119861
119872119872 (119896)
]
]
]
]
]
119906
119872 (119896)
(23)
Define
119860 (119896) =
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
(24)
119861
119894 (119896) =
[
[
[
[
[
119861
1119894 (119896)
119861
2119894 (119896)
119861
119872119894 (119896)
]
]
]
]
]
(25)
Using (20) and (21) the state (23) can be simplified as
119909 (119896 + 1) = [119860 (119896) + 119861119894 (119896) 119891119894
] 119909 (119896) (26)
in which 119860(119896) = 119860(119896) + sum119872119895 = 119894
119861
119895(119896)119891
lowast
119895
The robust stability constraint in (17) becomes
[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
]
1015840
times 119875
119894[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
] minus 119875
119894
le minus(119878
119894+
119872
sum
119895 = 119894
119891
lowast1015840
119895119877
119895119891
lowast
119895+ 119891
1015840
119894119877
119894119891
119894)
(27)
where
119878
119894=
[
[
[
[
119878
1
119878
2
d119878
119872
]
]
]
]
(28)
By defining an upper bound
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) le 120574119894 (29)
The optimal problem (22) is equivalent to
min120574119894 119875119894
120574
119894
st 119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) le 120574119894
(30)
Substituting 119875119894= 120574
119894119876
minus1
119894gt 0 119884
119894= 119891
119894119876
119894 with the input
constraints given in (13) and the stability constraint (27)followed by a Schur complement decomposition the min-imization of 119869
119894(119896) can be replaced by the minimization
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
So the upper bound of object function can be proved tobe
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ] 119897ge0
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) (19)
A state-feedback law is sought for each subsystem 119894 asfollows
119906
119894 (119896 + 119897 | 119896) = 119891119894119894
119909
119894 (119896 + 119897 | 119896) +
119872
sum
119895 = 119894
119891
119894119895119909
119895 (119896 + 119897 | 119896)
= 119891
119894119909 (119896 + 119897 | 119896)
(20)
where 119891119894= [1198911198941
119891
1198942sdot sdot sdot 119891
119894119872]When solving optimization problem of the subsystem 119894
the state-feedback law of the neighboring subsystem 119895 (119895 = 119894)
is expressed as
119906
119895 (119896 + 119897 | 119896) = 119891
lowast
119895119895119909
119895 (119896 + 119897 | 119896) +
119872
sum
119895 = 119904
119891
lowast
119895119904119909
119904 (119896 + 119897 | 119896)
= 119891
lowast
119895119909 (119896 + 119897 | 119896)
(21)
where 119891lowast119895= [119891
lowast
1198951119891
lowast
1198952sdot sdot sdot 119891
lowast
119895119872]
The RDMPC algorithm will be redefined using state-feedback law (20) to minimize the upper bound
min119906119894(119896+119897|119896)
119881
119894 (119909 (119896 | 119896)) = min
119891119894
119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) 119875
119894gt 0
(22)
For the whole power system the expression of 119909 is
119909 (119896 + 1) =
[
[
[
[
[
119909
1 (119896 + 1)
119909
2 (119896 + 1)
119909
119872 (119896 + 1)
]
]
]
]
]
=
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
[
[
[
[
[
119909
1 (119896)
119909
2 (119896)
119909
119872 (119896)
]
]
]
]
]
+
[
[
[
[
[
119861
11 (119896)
119861
21 (119896)
119861
1198721 (119896)
]
]
]
]
]
119906
1 (119896) +
[
[
[
[
[
119861
12 (119896)
119861
22 (119896)
119861
1198722 (119896)
]
]
]
]
]
119906
2 (119896)
+ sdot sdot sdot +
[
[
[
[
[
119861
1119872 (119896)
119861
2119872 (119896)
119861
119872119872 (119896)
]
]
]
]
]
119906
119872 (119896)
(23)
Define
119860 (119896) =
[
[
[
[
[
119860
11 (119896)
119860
12 (119896) sdot sdot sdot
119860
1119872 (119896)
119860
21 (119896)
119860
22 (119896) sdot sdot sdot
119860
2119872 (119896)
119860
1198721 (119896)
119860
1198722 (119896) sdot sdot sdot
119860
119872119872 (119896)
]
]
]
]
]
(24)
119861
119894 (119896) =
[
[
[
[
[
119861
1119894 (119896)
119861
2119894 (119896)
119861
119872119894 (119896)
]
]
]
]
]
(25)
Using (20) and (21) the state (23) can be simplified as
119909 (119896 + 1) = [119860 (119896) + 119861119894 (119896) 119891119894
] 119909 (119896) (26)
in which 119860(119896) = 119860(119896) + sum119872119895 = 119894
119861
119895(119896)119891
lowast
119895
The robust stability constraint in (17) becomes
[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
]
1015840
times 119875
119894[119860
(ℓ)
(119896 + 119897) + 119861
(ℓ)
119894(119896 + 119897) 119891119894
] minus 119875
119894
le minus(119878
119894+
119872
sum
119895 = 119894
119891
lowast1015840
119895119877
119895119891
lowast
119895+ 119891
1015840
119894119877
119894119891
119894)
(27)
where
119878
119894=
[
[
[
[
119878
1
119878
2
d119878
119872
]
]
]
]
(28)
By defining an upper bound
119869
119894 (119896) le 119881119894 (
119909 (119896 | 119896)) le 120574119894 (29)
The optimal problem (22) is equivalent to
min120574119894 119875119894
120574
119894
st 119909
1015840(119896 | 119896) 119875119894
119909 (119896 | 119896) le 120574119894
(30)
Substituting 119875119894= 120574
119894119876
minus1
119894gt 0 119884
119894= 119891
119894119876
119894 with the input
constraints given in (13) and the stability constraint (27)followed by a Schur complement decomposition the min-imization of 119869
119894(119896) can be replaced by the minimization
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
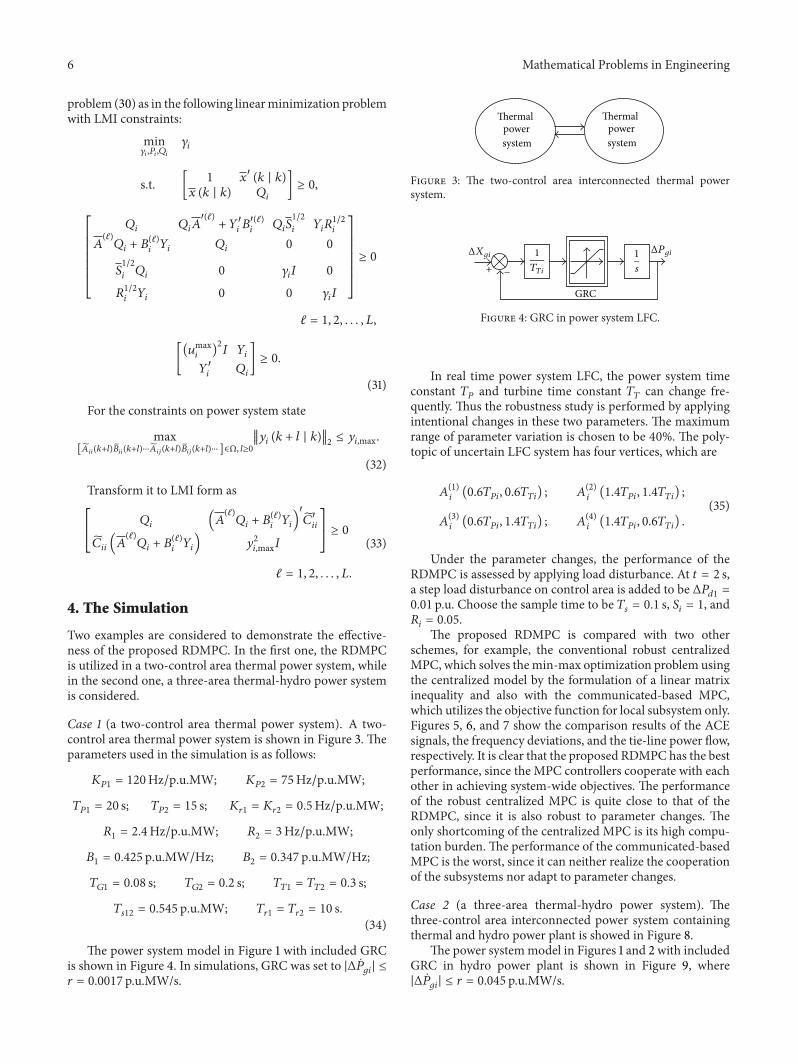
6 Mathematical Problems in Engineering
problem (30) as in the following linearminimization problemwith LMI constraints
min120574119894119875119894 119876119894
120574
119894
st [
1 119909
1015840(119896 | 119896)
119909 (119896 | 119896) 119876
119894
] ge 0
[
[
[
[
[
[
[
119876
119894119876
119894119860
1015840(ℓ)
+ 119884
1015840
119894119861
1015840(ℓ)
119894119876
119894119878
12
119894119884
119894119877
12
119894
119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894119876
1198940 0
119878
12
119894119876
1198940 120574
119894119868 0
119877
12
119894119884
1198940 0 120574
119894119868
]
]
]
]
]
]
]
ge 0
ℓ = 1 2 119871
[
(119906
max119894)
2119868 119884
119894
119884
1015840
119894119876
119894
] ge 0
(31)
For the constraints on power system state
max[119860119894119894(119896+119897)119861119894119894(119896+119897)sdotsdotsdot119860119894119895(119896+119897)119861119894119895(119896+119897)sdotsdotsdot ]isinΩ 119897ge0
1003817
1003817
1003817
1003817
119910
119894 (119896 + 119897 | 119896)
1003817
1003817
1003817
10038172le 119910
119894max
(32)
Transform it to LMI form as
[
[
119876
119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894)
1015840
119862
1015840
119894119894
119862
119894119894(119860
(ℓ)
119876
119894+ 119861
(ℓ)
119894119884
119894) 119910
2
119894max119868
]
]
ge 0
ℓ = 1 2 119871
(33)
4 The Simulation
Two examples are considered to demonstrate the effective-ness of the proposed RDMPC In the first one the RDMPCis utilized in a two-control area thermal power system whilein the second one a three-area thermal-hydro power systemis considered
Case 1 (a two-control area thermal power system) A two-control area thermal power system is shown in Figure 3 Theparameters used in the simulation is as follows
119870
1198751= 120HzpuMW 119870
1198752= 75HzpuMW
119879
1198751= 20 s 119879
1198752= 15 s 119870
1199031= 119870
1199032= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 3HzpuMW
119861
1= 0425 puMWHz 119861
2= 0347 puMWHz
119879
1198661= 008 s 119879
1198662= 02 s 119879
1198791= 119879
1198792= 03 s
119879
11990412= 0545 puMW 119879
1199031= 119879
1199032= 10 s
(34)
The power system model in Figure 1 with included GRCis shown in Figure 4 In simulations GRC was set to |Δ
119875
119892119894| le
119903 = 00017 puMWs
Thermalpowersystem
Thermalpowersystem
Figure 3 The two-control area interconnected thermal powersystem
ΔXgiΔPgi1
TTiminus+
GRC
1
s
Figure 4 GRC in power system LFC
In real time power system LFC the power system timeconstant 119879
119875and turbine time constant 119879
119879can change fre-
quently Thus the robustness study is performed by applyingintentional changes in these two parameters The maximumrange of parameter variation is chosen to be 40 The poly-topic of uncertain LFC system has four vertices which are
119860
(1)
119894(06119879
119875119894 06119879
119879119894) 119860
(2)
119894(14119879
119875119894 14119879
119879119894)
119860
(3)
119894(06119879
119875119894 14119879
119879119894) 119860
(4)
119894(14119879
119875119894 06119879
119879119894)
(35)
Under the parameter changes the performance of theRDMPC is assessed by applying load disturbance At 119905 = 2 sa step load disturbance on control area is added to be Δ119875
1198891=
001 pu Choose the sample time to be 119879119904= 01 s 119878
119894= 1 and
119877
119894= 005The proposed RDMPC is compared with two other
schemes for example the conventional robust centralizedMPC which solves themin-max optimization problem usingthe centralized model by the formulation of a linear matrixinequality and also with the communicated-based MPCwhich utilizes the objective function for local subsystem onlyFigures 5 6 and 7 show the comparison results of the ACEsignals the frequency deviations and the tie-line power flowrespectively It is clear that the proposed RDMPC has the bestperformance since the MPC controllers cooperate with eachother in achieving system-wide objectives The performanceof the robust centralized MPC is quite close to that of theRDMPC since it is also robust to parameter changes Theonly shortcoming of the centralized MPC is its high compu-tation burden The performance of the communicated-basedMPC is the worst since it can neither realize the cooperationof the subsystems nor adapt to parameter changes
Case 2 (a three-area thermal-hydro power system) Thethree-control area interconnected power system containingthermal and hydro power plant is showed in Figure 8
The power systemmodel in Figures 1 and 2 with includedGRC in hydro power plant is shown in Figure 9 where|Δ
119875
119892119894| le 119903 = 0045 puMWs
Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
ACE1
(pu
MW
)
002
001
0
0
minus001
minus002
minus0032 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(a)
ACE2
(pu
MW
)
4
2
0
minus2
minus4
times10minus3
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
(b)
Figure 5 ACE signals in the two subsystems
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
004
002
0
minus002
minus004
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
6
4
2
0
minus2
minus4
minus6
minus8
times10minus3
(b)
Figure 6 The frequency deviations
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Tie-
line p
ower
flow
001
0005
0
minus0005
minus001
minus0015
minus002
Figure 7 The tie-line power flow between two control areas
8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Thermalpowerplant
Thermalpowerplant
plantHydro power
Figure 8 The three-control area interconnected thermal-hydro power system
ΔXgiΔPgi1 minus sTWi
1 + 05sTWi
GRC
Figure 9 GRC in hydro power system
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
002
001
0
minus001
minus002
minus003
minus004
ACE1
(pu
MW
)
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE2
(pu
MW
)
002
0015
001
0005
0
minus0005
minus001
minus0015
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
ACE3
(pu
MW
)
003
0
minus001
minus002
001
002
(c)
Figure 10 ACE signals in three-area thermal-hydro power system
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
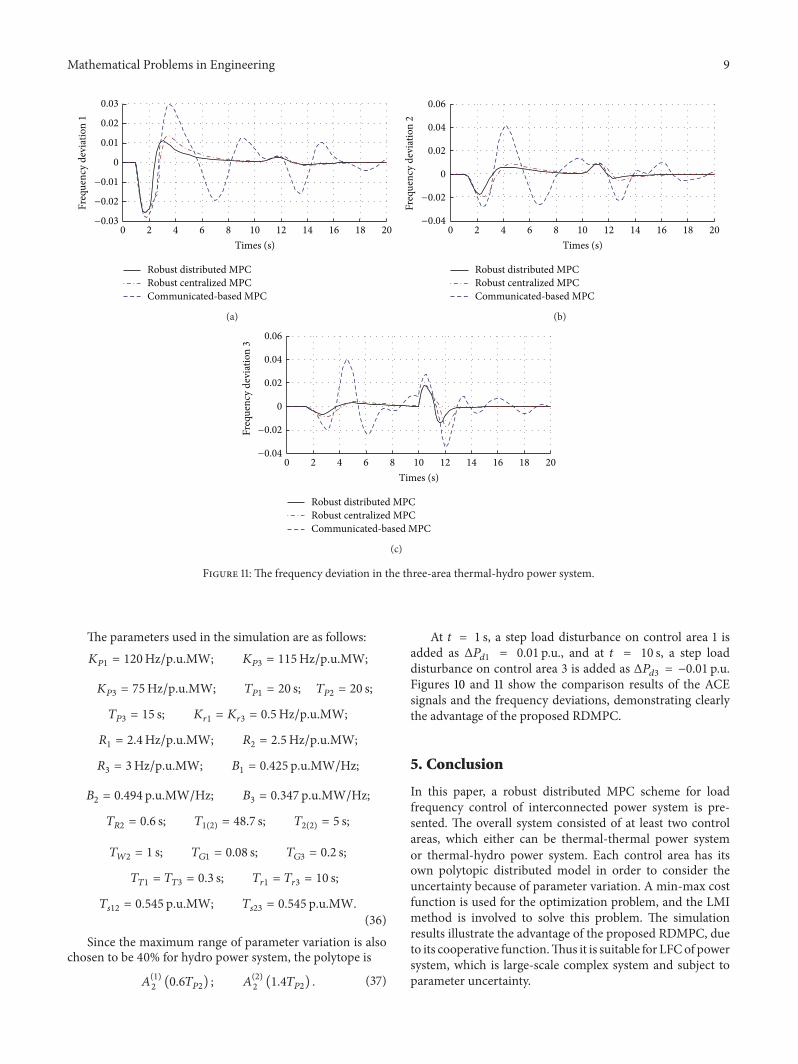
Mathematical Problems in Engineering 9
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion1
003
002
001
0
minus001
minus002
minus003
(a)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion2
006
004
002
0
minus002
minus004
(b)
0 2 4 6 8 10 12 14 16 18 20
Times (s)
Robust distributed MPCRobust centralized MPCCommunicated-based MPC
Freq
uenc
y de
viat
ion3
006
004
002
0
minus002
minus004
(c)
Figure 11 The frequency deviation in the three-area thermal-hydro power system
The parameters used in the simulation are as follows119870
1198751= 120HzpuMW 119870
1198753= 115HzpuMW
119870
1198753= 75HzpuMW 119879
1198751= 20 s 119879
1198752= 20 s
119879
1198753= 15 s 119870
1199031= 119870
1199033= 05HzpuMW
119877
1= 24HzpuMW 119877
2= 25HzpuMW
119877
3= 3HzpuMW 119861
1= 0425 puMWHz
119861
2= 0494 puMWHz 119861
3= 0347 puMWHz
119879
1198772= 06 s 119879
1(2)= 487 s 119879
2(2)= 5 s
119879
1198822= 1 s 119879
1198661= 008 s 119879
1198663= 02 s
119879
1198791= 119879
1198793= 03 s 119879
1199031= 119879
1199033= 10 s
119879
11990412= 0545 puMW 119879
11990423= 0545 puMW
(36)Since the maximum range of parameter variation is also
chosen to be 40 for hydro power system the polytope is
119860
(1)
2(06119879
1198752) 119860
(2)
2(14119879
1198752)
(37)
At 119905 = 1 s a step load disturbance on control area 1 isadded as Δ119875
1198891= 001 pu and at 119905 = 10 s a step load
disturbance on control area 3 is added as Δ1198751198893= minus001 pu
Figures 10 and 11 show the comparison results of the ACEsignals and the frequency deviations demonstrating clearlythe advantage of the proposed RDMPC
5 Conclusion
In this paper a robust distributed MPC scheme for loadfrequency control of interconnected power system is pre-sented The overall system consisted of at least two controlareas which either can be thermal-thermal power systemor thermal-hydro power system Each control area has itsown polytopic distributed model in order to consider theuncertainty because of parameter variation A min-max costfunction is used for the optimization problem and the LMImethod is involved to solve this problem The simulationresults illustrate the advantage of the proposed RDMPC dueto its cooperative functionThus it is suitable for LFCof powersystem which is large-scale complex system and subject toparameter uncertainty
10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants 60974051 61273144 and61203041 Natural Science Foundation of Beijing under Grant4122071 Chinese National Postdoctoral Science Foundationunder Grants 2011M500217 and 2012T50036 and the Doc-toral Fund of Ministry of Education of China under Grant20120036120013
References
[1] R K Cavin M C Budge and P Rasmussen ldquoAn optimal linearsystem approach to load-frequency controlrdquo IEEE Transactionson Power Apparatus and Systems vol 90 no 6 pp 2472ndash24821971
[2] S Yin H Luo and S Ding ldquoReal-time implementation of faulttolerant control system with performance optimizationrdquo IEEETransactions on Industrial Electronics vol 61 no 5 pp 2402ndash2411 2013
[3] S Ding S Yin K Peng H Hao and B Shen ldquoA novel schemefor key performance indicator prediction and diagnosis withapplication to an industrial hot strip millrdquo IEEE Transactionson Industrial Informatics vol 9 no 4 pp 2239ndash2247 2012
[4] T LiW X Zheng and C Lin ldquoDelay-slope-dependent stabilityresults of recurrent neural networksrdquo IEEE Transactions onNeural Networks vol 22 no 12 pp 2138ndash2143 2011
[5] Y Wang R Zhou and C Wen ldquoRobust load-frequency con-troller design for power systemsrdquo IEE Proceedings C vol 140no 1 pp 11ndash16 1993
[6] A M Stankovic G Tadmor and T A Sakharuk ldquoOn robustcontrol analysis and design for load frequency regulationrdquo IEEETransactions on Power Systems vol 13 no 2 pp 449ndash455 1998
[7] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[8] H J Lee J B Park and Y H Joo ldquoRobust load-frequencycontrol for uncertain nonlinear power systems a fuzzy logicapproachrdquo Information Sciences vol 176 no 23 pp 3520ndash35372006
[9] H Shayeghi H A Shayanfar and O P Malik ldquoRobust decen-tralized neural networks based LFC in a deregulated powersystemrdquo Electric Power Systems Research vol 77 no 3-4 pp241ndash251 2007
[10] D Rerkpreedapong A Hasanovic and A Feliachi ldquoRobustload frequency control using genetic algorithms and linearmatrix inequalitiesrdquo IEEE Transactions on Power Systems vol18 no 2 pp 855ndash861 2003
[11] M V Kothare V Balakrishnan and M Morari ldquoRobust con-strained model predictive control using linear matrix inequali-tiesrdquo Automatica vol 32 no 10 pp 1361ndash1379 1996
[12] X Liu S Feng and M Ma ldquoRobust MPC for the constrainedsystem with polytopic uncertaintyrdquo International Journal ofSystems Science vol 43 no 2 pp 248ndash258 2012
[13] A N Venkat I A Hiskens J B Rawlings and S J WrightldquoDistributed MPC strategies with application to power systemautomatic generation controlrdquo IEEE Transactions on ControlSystems Technology vol 16 no 6 pp 1192ndash1206 2008
[14] T H Mohamed H Bevrani A A Hassan and T HiyamaldquoDecentralized model predictive based load frequency controlin an interconnected power systemrdquo Energy Conversion andManagement vol 52 no 2 pp 1208ndash1214 2011
[15] W Al-Gherwi H Budman and A Elkamel ldquoA robust dis-tributed model predictive control algorithmrdquo Journal of ProcessControl vol 21 no 8 pp 1127ndash1137 2011
[16] K Vrdoljak N Peric and I Petrovic ldquoSlidingmode based load-frequency control in power systemsrdquo Electric Power SystemsResearch vol 80 no 5 pp 514ndash527 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of


















