Research Article Numerical and Analytical Study for Fourth ...els, and chemical kinetics. Integro-di...
8
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 434753, 7 pages http://dx.doi.org/10.1155/2013/434753 Research Article Numerical and Analytical Study for Fourth-Order Integro-Differential Equations Using a Pseudospectral Method N. H. Sweilam, 1 M. M. Khader, 2 and W. Y. Kota 3 1 Department of Mathematics, Faculty of Science, Cairo University, Giza 12613, Egypt 2 Department of Mathematics, Faculty of Science, Benha University, Benha 13511, Egypt 3 Department of Mathematics, Faculty of Science, Mansoura University, Damietta 35516, Egypt Correspondence should be addressed to M. M. Khader; [email protected] Received 16 July 2012; Accepted 2 December 2012 Academic Editor: Pedro Ribeiro Copyright © 2013 N. H. Sweilam et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A numerical method for solving fourth-order integro-differential equations is presented. is method is based on replacement of the unknown function by a truncated series of well-known shiſted Chebyshev expansion of functions. An approximate formula of the integer derivative is introduced. e introduced method converts the proposed equation by means of collocation points to system of algebraic equations with shiſted Chebyshev coefficients. us, by solving this system of equations, the shiſted Chebyshev coefficients are obtained. Special attention is given to study the convergence analysis and derive an upper bound of the error of the presented approximate formula. Numerical results are performed in order to illustrate the usefulness and show the efficiency and the accuracy of the present work. 1. Introduction e integro-differential equation (IDE) is an equation that involves both integrals and derivatives of an unknown func- tion. Mathematical modeling of real-life problems usually results in functional equations, like ordinary or partial differential equations, and integral and integro-differential equations, stochastic equations. Many mathematical formu- lations of physical phenomena contain integro-differential equations; these equations arise in many fields like physics, astronomy, potential theory, fluid dynamics, biological mod- els, and chemical kinetics. Integro-differential equations; are usually difficult to solve analytically; so, it is required to obtain an efficient approximate solution [1–5]. Recently, several numerical methods to solve IDEs have been given such as variational iteration method [6, 7], homotopy pertur- bation method [8, 9], spline functions expansion [10, 11], and collocation method [12–15]. Chebyshev polynomials are well-known family of orthog- onal polynomials on the interval [−1, 1] that have many applications [4, 6, 8, 13]. ey are widely used because of their good properties in the approximation of functions. However, with our best knowledge, very little work was done to adapt these polynomials to the solution of integro-differential equations. Orthogonal polynomials have a great variety and wealth of properties. Some of these properties take a very concise form in the case of the Chebyshev polynomials, mak- ing Chebyshev polynomials of leading importance among orthogonal polynomials. e Chebyshev polynomials belong to an exclusive band of orthogonal polynomials, known as Jacobi polynomials, which correspond to weight functions of the form (1 − ) (1 + ) and which are solutions of Sturm- Liouville equations [16]. In this work, we derive an approximate formula of the integral derivative () () and derive an upper bound of the error of this formula, and then we use this formula to solve a class of two-point boundary value problems (BVPs) for the fourth-order integro-differential equations as () () = ()+ ()+∫ 0 [ () ()+ () Θ ( ())] , 0≤, ≤1, (1)
Transcript of Research Article Numerical and Analytical Study for Fourth ...els, and chemical kinetics. Integro-di...
-
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013, Article ID 434753, 7 pageshttp://dx.doi.org/10.1155/2013/434753
Research ArticleNumerical and Analytical Study for Fourth-OrderIntegro-Differential Equations Using a Pseudospectral Method
N. H. Sweilam,1 M. M. Khader,2 and W. Y. Kota3
1 Department of Mathematics, Faculty of Science, Cairo University, Giza 12613, Egypt2 Department of Mathematics, Faculty of Science, Benha University, Benha 13511, Egypt3 Department of Mathematics, Faculty of Science, Mansoura University, Damietta 35516, Egypt
Correspondence should be addressed to M. M. Khader; [email protected]
Received 16 July 2012; Accepted 2 December 2012
Academic Editor: Pedro Ribeiro
Copyright © 2013 N. H. Sweilam et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
A numerical method for solving fourth-order integro-differential equations is presented. This method is based on replacement ofthe unknown function by a truncated series of well-known shifted Chebyshev expansion of functions. An approximate formulaof the integer derivative is introduced. The introduced method converts the proposed equation by means of collocation points tosystem of algebraic equations with shifted Chebyshev coefficients. Thus, by solving this system of equations, the shifted Chebyshevcoefficients are obtained. Special attention is given to study the convergence analysis and derive an upper bound of the error of thepresented approximate formula. Numerical results are performed in order to illustrate the usefulness and show the efficiency andthe accuracy of the present work.
1. Introduction
The integro-differential equation (IDE) is an equation thatinvolves both integrals and derivatives of an unknown func-tion. Mathematical modeling of real-life problems usuallyresults in functional equations, like ordinary or partialdifferential equations, and integral and integro-differentialequations, stochastic equations. Many mathematical formu-lations of physical phenomena contain integro-differentialequations; these equations arise in many fields like physics,astronomy, potential theory, fluid dynamics, biological mod-els, and chemical kinetics. Integro-differential equations;are usually difficult to solve analytically; so, it is requiredto obtain an efficient approximate solution [1–5]. Recently,several numerical methods to solve IDEs have been givensuch as variational iterationmethod [6, 7], homotopy pertur-bation method [8, 9], spline functions expansion [10, 11], andcollocation method [12–15].
Chebyshev polynomials arewell-known family of orthog-onal polynomials on the interval [−1, 1] that have manyapplications [4, 6, 8, 13].They are widely used because of theirgood properties in the approximation of functions. However,with our best knowledge, very little work was done to
adapt these polynomials to the solution of integro-differentialequations. Orthogonal polynomials have a great variety andwealth of properties. Some of these properties take a veryconcise form in the case of the Chebyshev polynomials, mak-ing Chebyshev polynomials of leading importance amongorthogonal polynomials.The Chebyshev polynomials belongto an exclusive band of orthogonal polynomials, known asJacobi polynomials, which correspond to weight functions ofthe form (1 − 𝑥)𝛼(1 + 𝑥)𝛽 and which are solutions of Sturm-Liouville equations [16].
In this work, we derive an approximate formula of theintegral derivative 𝑦(𝑛)(𝑥) and derive an upper bound of theerror of this formula, and then we use this formula to solvea class of two-point boundary value problems (BVPs) for thefourth-order integro-differential equations as
𝑦(𝑖𝑣)
(𝑥) = 𝑓 (𝑥)+𝛾𝑦 (𝑥)+∫𝑥
0
[𝑝 (𝑡) 𝑦 (𝑡)+𝑞 (𝑡) Θ (𝑦 (𝑡))] 𝑑𝑡,
0≤𝑥, 𝑡≤1,
(1)
-
2 Mathematical Problems in Engineering
under the boundary and initial conditions
𝑦 (0) = 𝛼0, 𝑦
(0) = 𝛼1,
𝑦 (1) = 𝛽0, 𝑦
(1) = 𝛽1,
(2)
where 𝑓(𝑥), 𝑝(𝑥), and 𝑞(𝑥) are known functions and 𝛾, 𝛼0,
𝛼1, 𝛽0, and𝛽
1are suitable constants. Several numericalmeth-
ods to solve the fourth-order integro-differential equationshave been given such as Chebyshev cardinal functions [17],variational iteration method [7], and others.
2. Some Basic Properties and Derivation of anApproximate Formula of the Derivative forChebyshev Polynomials Expansion
The Chebyshev polynomial of the first kind is a polynomialin 𝑧 of degree 𝑛, defined by the relation
𝑇𝑛(𝑧) = cos 𝑛𝜃, when 𝑧 = cos 𝜃. (3)
The Chebyshev polynomials of degree 𝑛 > 0 of the first kindhave precisely 𝑛 zeros and 𝑛 + 1 local extrema in the interval[−1, 1]. The zeros of 𝑇
𝑛(𝑧) are denoted by
𝑧𝑘= cos (𝑘 − 1/2) 𝜋
𝑛, 𝑘 = 1, 2, . . . , 𝑛. (4)
The Chebyshev polynomials can be determined with the aidof the following recurrence formula [18]:
𝑇𝑛+1
(𝑧) = 2𝑧𝑇𝑛(𝑧) − 𝑇
𝑛−1(𝑧) ,
𝑇0(𝑧) = 1, 𝑇
1(𝑧) = 𝑧, 𝑛 = 1, 2, . . . .
(5)
The analytic form of the Chebyshev polynomials 𝑇𝑛(𝑧) of
degree 𝑛 is given by
𝑇𝑛(𝑧) = 𝑛
[𝑛/2]
∑𝑖=0
(−1)𝑖
2𝑛−2𝑖−1 (𝑛 − 𝑖 − 1)!
(𝑖)! (𝑛 − 2𝑖)!𝑧𝑛−2𝑖
, (6)
where [𝑛/2] denotes the integer part of 𝑛/2.The orthogonalitycondition is
∫1
−1
𝑇𝑖(𝑧) 𝑇𝑗(𝑧)
√1 − 𝑧2𝑑𝑥 =
{{{{{{
{{{{{{
{
𝜋, for 𝑖 = 𝑗 = 0;
𝜋
2, for 𝑖 = 𝑗 ̸= 0;
0, for 𝑖 ̸= 𝑗.
(7)
In order to use these polynomials on the interval [0, 1],we define the so called shifted Chebyshev polynomials byintroducing the change of variable 𝑧 = 2𝑥 − 1. The shiftedChebyshev polynomials are denoted by 𝑇∗
𝑛(𝑥) and defined as
𝑇∗
𝑛(𝑥) = 𝑇
𝑛(2𝑥 − 1) = 𝑇
2𝑛(√𝑥).
The function 𝑦(𝑥), which belongs to the space of squareintegrable in [0, 1], may be expressed in terms of shiftedChebyshev polynomials as
𝑦 (𝑥) =
∞
∑𝑖=0
𝑐𝑖𝑇∗
𝑖(𝑥) , (8)
where the coefficients 𝑐𝑖are given by
𝑐0=
1
𝜋∫1
0
𝑦 (𝑥) 𝑇∗
0(𝑥)
√𝑥 − 𝑥2𝑑𝑥, 𝑐
𝑖=
2
𝜋∫1
0
𝑦 (𝑥) 𝑇∗
𝑖(𝑥)
√𝑥 − 𝑥2𝑑𝑥,
𝑖 = 1, 2, . . . .
(9)
In practice, only the first (𝑚 + 1) terms of shiftedChebyshev polynomials are considered. Then, we have that
𝑦𝑚(𝑥) =
𝑚
∑𝑖=0
𝑐𝑖𝑇∗
𝑖(𝑥) . (10)
Lemma 1. The analytic form of the shifted Chebyshev polyno-mials 𝑇∗
𝑛(𝑥) of degree 𝑛 is given by
𝑇∗
𝑛(𝑥) = 𝑛
𝑛
∑𝑘=0
(−1)𝑛−𝑘
22𝑘
(𝑛 + 𝑘 − 1)!
(2𝑘)! (𝑛 − 𝑘)!𝑥𝑘
, 𝑛 = 1, 2, . . . .
(11)
Proof. Since we have 𝑇∗𝑛(𝑥) = 𝑇
2𝑛(√𝑥), then by substituting
in (6), we can obtain that
𝑇∗
𝑛(𝑥) = 2𝑛
𝑛
∑𝑖=0
(−1)𝑖22𝑛−2𝑖−1
(2𝑛 − 𝑖 − 1)!
(𝑖)! (2𝑛 − 2𝑖)!𝑥𝑛−𝑖
,
𝑛 = 1, 2, . . . .
(12)
Now, we put 𝑘 = 𝑛 − 𝑖 in (12) we obtain the desired result(11).
Themain approximate formula of the derivative of 𝑦𝑚(𝑥),
and is given in the following theorem.
Theorem 2. Let 𝑦(𝑥) be approximated by shifted Chebyshevpolynomials as (10), and also suppose that 𝑟 is integer; then,
𝐷𝑟
(𝑦𝑚(𝑥)) =
𝑚
∑𝑖=𝑟
𝑖
∑𝑘=𝑟
𝑐𝑖𝜆𝑖,𝑘,𝑟
𝑥𝑘−𝑟
, (13)
where 𝜆𝑖,𝑘,𝑟
is given by
𝜆𝑖,𝑘,𝑟
= (−1)𝑖−𝑘
22𝑘
𝑖 (𝑖 + 𝑘 − 1)!𝑘!
(𝑖 − 𝑘)! (2𝑘)! (𝑘 − 𝑟)!. (14)
Proof. Since the differential operator 𝐷𝑟 is linear, we canobtain that
𝐷𝑟
(𝑦𝑚(𝑥)) =
𝑚
∑𝑖=0
𝑐𝑖𝐷𝑟
(𝑇∗
𝑖(𝑥)) . (15)
Since𝐷𝑟𝑐 = 0, 𝑐 is a constant, and
𝐷𝑟
𝑥𝑛
={
{
{
0, for 𝑛 ∈ 𝑁, 𝑛 < 𝑟,𝑛!
(𝑛 − 𝑟)!𝑥𝑛−𝑟
, for 𝑛 ∈ 𝑁, 𝑛 ≥ 𝑟. (16)
Then, we have that
𝐷𝑟
𝑇∗
𝑖(𝑥) = 0, 𝑖 = 0, 1, . . . , 𝑟 − 1, (17)
-
Mathematical Problems in Engineering 3
and for 𝑖 = 𝑟, 𝑟 + 1, . . . , 𝑚, and by using (16), we get that
𝐷𝑟
𝑇∗
𝑖(𝑥) = 𝑖
𝑖
∑𝑘=𝑟
(−1)𝑖−𝑘
22𝑘
(𝑖 + 𝑘 − 1)!
(𝑖 − 𝑘)! (2𝑘)!𝐷𝑟
𝑥𝑘
= 𝑖
𝑖
∑𝑘=𝑟
(−1)𝑖−𝑘
22𝑘
(𝑖 + 𝑘 − 1)!𝑘!
(𝑖 − 𝑘)! (2𝑘)! (𝑘 − 𝑟)!𝑥𝑘−𝑟
.
(18)
A combination of (17), (18), and (14) leads to the desired resultand completes the proof of the theorem.
3. Error Analysis
In this section, special attention is given to study the conver-gence analysis and evaluate the upper bound of the error ofthe proposed formula.
Theorem 3 (Chebyshev truncation theorem; see [18]). Theerror in approximating 𝑦(𝑥) by the sum of its first 𝑚 terms isbounded by the sum of the absolute values of all the neglectedcoefficients. If
𝑦𝑚(𝑥) =
𝑚
∑𝑘=0
𝑐𝑘𝑇𝑘(𝑥) , (19)
then
𝐸𝑇(𝑚) ≡
𝑦 (𝑥) − 𝑦𝑚 (𝑥) ≤
∞
∑𝑘=𝑚+1
𝑐𝑘 , (20)
for all 𝑦(𝑥), all𝑚, and all 𝑥 ∈ [−1, 1].
Theorem 4. The derivative of order 𝑟 for the shifted Chebyshevpolynomials can be expressed in terms of the shifted Chebyshevpolynomials themselves in the following form:
𝐷𝑟
(𝑇∗
𝑖(𝑥)) =
𝑖
∑𝑘=𝑟
𝑘−𝑟
∑𝑗=0
Θ𝑖,𝑗,𝑘
𝑇∗
𝑗(𝑥) , (21)
where
Θ𝑖,𝑗,𝑘
=(−1)𝑖−𝑘
2𝑖 (𝑖 + 𝑘 − 1)!Γ (𝑘 − 𝑟 + 1/2)
ℎ𝑗Γ (𝑘 + 1/2) (𝑖 − 𝑘)! (𝑘 − 𝑟 − 𝑗)! (𝑘 + 𝑗 − 𝑟)!
,
ℎ0= 2, ℎ
𝑗= 1, 𝑗 = 0, 1, . . . .
(22)
Proof. We use the properties of the shifted Chebyshev poly-nomials [18] and expand 𝑥𝑘−𝑟 in (18) in the following form:
𝑥𝑘−𝑟
=
𝑘−𝑟
∑𝑗=0
𝑐𝑘𝑗𝑇∗
𝑗(𝑥) , (23)
where 𝑐𝑘𝑗can be obtained using (9), and𝑦(𝑥) = 𝑥𝑘−𝑟; then,
𝑐𝑘𝑗
=2
ℎ𝑗𝜋
∫1
0
𝑥𝑘−𝑟
𝑇∗
𝑗(𝑥)
√𝑥 − 𝑥2𝑑𝑥, ℎ
0= 2, ℎ
𝑗= 1,
𝑗 = 1, 2, . . . .
(24)
At 𝑗 = 0, we find that 𝑐𝑘0
= (1/𝜋) ∫10
(𝑥𝑘−𝑟
𝑇∗
0(𝑥)/
√𝑥 − 𝑥2)𝑑𝑥 = (1/√𝜋)(Γ(𝑘 − 𝑟 + 1/2)/(𝑘 − 𝑟)!); also, at any𝑗 and using the formula (10), we can find that
𝑐𝑘𝑗
=𝑗
√𝜋
𝑗
∑𝑙=0
(−1)𝑗−𝑙
(𝑗 + 𝑙 − 1)!22𝑙+1
Γ (𝑘 + 𝑙 − 𝑟 + 1/2)
(𝑗 − 𝑙)! (2𝑙)! (𝑘 + 𝑙 − 𝑟)!,
𝑗 = 1, 2, 3, . . . ,
(25)
employing (18) and (23) gives
𝐷𝑟
(𝑇∗
𝑖(𝑥)) =
𝑖
∑𝑘=𝑟
𝑘−𝑟
∑𝑗=0
Θ𝑖,𝑗,𝑘
𝑇∗
𝑗(𝑥) , 𝑖 = 𝑟, 𝑟 + 1, . . . , (26)
where
Θ𝑖,𝑗,𝑘 =
{{{{{{{{{{{{
{{{{{{{{{{{{
{
𝑖
(−1)𝑖−𝑘(𝑖 + 𝑘 − 1)!2
2𝑘𝑘!Γ (𝑘 − 𝑟 + 1/2)
(𝑖 − 𝑘)! (2𝑘)!√𝜋 (Γ (𝑘 + 1 − 𝑟))2, 𝑗 = 0;
(−1)𝑖−𝑘𝑖𝑗 (𝑖 + 𝑘 − 1)!2
2𝑘+1𝑘!
√𝜋 (𝑘 − 𝑟)! (𝑖 − 𝑘)! (2𝑘)!
×
𝑗
∑
𝑙=0
(−1)𝑗−𝑙(𝑗 + 𝑙 − 1)!2
2𝑙Γ (𝑘 + 𝑙 − 𝑟 + 1/2)
(𝑗 − 𝑙)! (2𝑙)! (𝑘 + 𝑙 − 𝑟)!
, 𝑗 = 1, 2, 3, . . . .
(27)
After some lengthy manipulation, Θ𝑖,𝑗,𝑘
can be put in thefollowing form:
Θ𝑖,𝑗,𝑘
=(−1)𝑖−𝑘
2𝑖 (𝑖 + 𝑘 − 1)!Γ (𝑘 − 𝑟 + 1/2)
ℎ𝑗Γ (𝑘 + 1/2) (𝑖 − 𝑘)! (𝑘 − 𝑟 − 𝑗)! (𝑘 + 𝑗 − 𝑟)!
,
𝑗 = 0, 1, . . . ,
(28)
and this completes the proof of the theorem.
Theorem 5. The error |𝐸𝑇(𝑚)| = |𝐷
𝑟
𝑦(𝑥) − 𝐷𝑟
𝑦𝑚(𝑥)| in
approximating𝐷𝑟𝑦(𝑥) by𝐷𝑟𝑦𝑚(𝑥) is bounded by
𝐸𝑇 (𝑚) ≤
∞
∑𝑖=𝑚+1
𝑐𝑖(
𝑖
∑𝑘=𝑟
𝑘−𝑟
∑𝑗=0
Θ𝑖,𝑗,𝑘
)
. (29)
Proof. A combination of (8), (10), and (21) leads to
𝐸𝑇 (𝑚) =
𝐷𝑟
𝑦 (𝑥) − 𝐷𝑟
𝑦𝑚(𝑥)
=
∞
∑𝑖=𝑚+1
𝑐𝑖(
𝑖
∑𝑘=𝑟
𝑘−𝑟
∑𝑗=0
Θ𝑖,𝑗,𝑘
𝑇∗
𝑗(𝑥))
,(30)
but |𝑇∗𝑗(𝑥)| ≤ 1; so, we can obtain that
𝐸𝑇 (𝑚) ≤
∞
∑𝑖=𝑚+1
𝑐𝑖(
𝑖
∑𝑘=𝑟
𝑘−𝑟
∑𝑗=0
Θ𝑖,𝑗,𝑘
)
, (31)
and subtracting the truncated series from the infinite series,bounding each term in the difference, and summing thebounds complete the proof of the theorem.
-
4 Mathematical Problems in Engineering
4. Procedure Solution for the Fourth-OrderIntegro-Differential Equation
In this section, we will present the proposed method to solvenumerically the fourth-order integro-differential equation ofthe form in (1).The unknown function𝑦(𝑥)may be expandedby finite series of shifted Chebyshev polynomials as in thefollowing approximation:
𝑦𝑚(𝑥) =
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥) , (32)
and approximated formula of its derivatives can be defined inTheorem 2. From (1), (32), andTheorem 2, we have that
𝑚
∑𝑖=𝑟
𝑖
∑𝑘=𝑟
𝑐𝑖𝜆𝑖,𝑘,𝑟
𝑥𝑘−𝑟
= 𝑓 (𝑥) + 𝛾
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥)
+ ∫𝑥
0
[𝑝 (𝑡) (
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))
+ 𝑞 (𝑡) Θ(
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))] 𝑑𝑡.
(33)
We now collocate (33) at (𝑚 − 1 + 𝑟) points 𝑥𝑠, 𝑠 =
0, 1, . . . , 𝑚 − 𝑟 as
𝑚
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,4
𝑥𝑘−4
𝑠
= 𝑓 (𝑥𝑠) + 𝛾
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥𝑠)
+ ∫𝑥𝑠
0
[𝑝 (𝑡) (
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))
+ 𝑞 (𝑡) Θ(
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))] 𝑑𝑡.
(34)
For suitable collocation points, we use roots of shifted Cheby-shev polynomial 𝑇∗
𝑚+1−𝑟(𝑥). The integral terms in (34) can be
found using composite trapezoidal integration technique as
∫𝑥𝑠
0
[𝑝 (𝑡) (
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡)) + 𝑞 (𝑡) Θ(
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))] 𝑑𝑡
≅ℎ𝑠
2(Ω (𝑡
0) + Ω (𝑡
𝐿) + 2
𝐿−1
∑𝑘=1
Ω(𝑡𝑘)) ,
(35)
where Ω(𝑡) = 𝑝(𝑡) ∑𝑚𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡) + 𝑞(𝑡)Θ(∑
𝑚
𝑛=0𝑐𝑛𝑇∗
𝑛(𝑡)), ℎ
𝑠=
𝑥𝑠/𝐿, for an arbitrary integer 𝐿, 𝑡
𝑗+1= 𝑡𝑗+ ℎ𝑠, 𝑠 = 0, 1, . . . ,
𝑚 − 𝑟, and 𝑗 = 0, 1, . . . , 𝐿. So, by using (34) and (35), weobtain
𝑚
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,𝑟
𝑥𝑘−𝑟
𝑠
= 𝑓 (𝑥𝑠) + 𝛾
𝑚
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥𝑠)
+ℎ𝑠
2(Ω (𝑡
0) + Ω (𝑡
𝐿) + 2
𝐿−1
∑𝑘=1
Ω(𝑡𝑘)) .
(36)
Also, by substituting (32) in the boundary conditions (2), wecan obtain 𝑟 equations as follows:
𝑚
∑𝑖=0
(−1)𝑖
𝑐𝑖= 𝛼0,
𝑚
∑𝑖=0
𝑐𝑖= 𝛽0,
𝑚
∑𝑖=2
𝑐𝑖𝑇∗
𝑖
(0) = 𝛼1,
𝑚
∑𝑖=2
𝑐𝑖𝑇∗
𝑖
(1) = 𝛽1.
(37)
Equation (36), together with 𝑟 equations of the bound-ary conditions (37), give (𝑚 + 1) of system of algebraicequations which can be solved, for the unknowns 𝑐
𝑛, 𝑛 =
0, 1, . . . , 𝑚, using conjugate gradient method or Newtoniteration method.
5. Numerical Results
In this section, to verify the validity and the accuracy andsupport our theoretical discussion of the proposed method,we give some computations results of numerical examples.
Example 6. Consider the nonlinear fourth-order integro-differential equation as in (1) and (2) with 𝑓(𝑥) = 1, 𝛾 =0, 𝑝(𝑡) = 0, 𝑞(𝑡) = 𝑒
−𝑡
, and Θ(𝑦) = 𝑦2(𝑥); then, theintegro-differential equation will be
𝑦(𝑖𝑣)
(𝑥) = 1 + ∫𝑥
0
𝑒−𝑡
𝑦2
(𝑡) 𝑑𝑡, 0 ≤ 𝑥 ≤ 1, (38)
subject to the boundary conditions
𝑦 (0) = 𝑦
(0) = 1, 𝑦 (1) = 𝑦
(1) = 𝑒. (39)
The exact solution of this problem is 𝑦(𝑥) = 𝑒𝑥 [7].We apply the suggested method with 𝑚 = 5 and
approximate the solution 𝑦(𝑥) as follows:
𝑦5(𝑥) =
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥) . (40)
From (38), (40), andTheorem 2, we have that5
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,4
𝑥𝑘−4
= 1 + ∫𝑥
0
𝑒−𝑡
(
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))
2
𝑑𝑡. (41)
We now collocate (41) at points, 𝑥𝑠, 𝑠 = 0, 1 as
5
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,4
𝑥𝑘−4
𝑠= 1 + ∫
𝑥𝑠
0
𝑒−𝑡
(
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))
2
𝑑𝑡. (42)
-
Mathematical Problems in Engineering 5
For suitable collocation points we use roots of shifted Cheby-shev polynomial 𝑇∗
2(𝑥). The integral terms in (42) can be
found using composite trapezoidal integration technique as
∫𝑥𝑠
0
𝑒−𝑡
(
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))
2
𝑑𝑡
=ℎ𝑠
2(Ω (𝑡
0) + Ω (𝑡
𝐿) + 2
𝐿−1
∑𝑘=1
Ω(𝑡𝑘)) ,
(43)
where Ω(𝑡) = 𝑒−𝑡(∑5𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡))2, ℎ𝑠= 𝑥𝑠/𝐿, for an arbitrary
integer 𝐿, 𝑡𝑗+1
= 𝑡𝑗+ ℎ𝑠, 𝑠 = 0, 1, and 𝑗 = 0, 1, . . . , 𝐿. So,
by using (43) and (42), we obtain
5
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,4
𝑥𝑘−4
𝑠
= 1 +ℎ𝑠
2(Ω (𝑡
0) + Ω (𝑡
𝐿) + 2
𝐿−1
∑𝑘=1
Ω(𝑡𝑘)) .
(44)
Also, by substituting (40) in the boundary conditions (39), wecan obtain four equations as follows:
𝑐0− 𝑐1+ 𝑐2− 𝑐3+ 𝑐4− 𝑐5= 1,
𝑐0+ 𝑐1+ 𝑐2+ 𝑐3+ 𝑐4+ 𝑐5= 𝑒,
𝑙0𝑐0+ 𝑙1𝑐1+ 𝑙2𝑐2+ 𝑙3𝑐3+ 𝑙4𝑐4+ 𝑙5𝑐5= 1,
𝑠0𝑐0+ 𝑠1𝑐1+ 𝑠2𝑐2+ 𝑠3𝑐3+ 𝑠4𝑐4+ 𝑠5𝑐5= 𝑒,
(45)
where 𝑙𝑖= 𝑇∗
𝑖
(0) and 𝑠𝑖= 𝑇∗
𝑖
(1).Equation (44), together with four equations of the bound-
ary conditions (45), represent, a nonlinear system of sixalgebraic equations in the coefficients 𝑐
𝑛; by solving it using
the Newton iteration method, we obtain
𝑐0= 1.75379, 𝑐
1= 0.85039, 𝑐
2= 0.10478,
𝑐3= 0.00872, c
4= 0.00057, 𝑐
5= 0.00003.
(46)
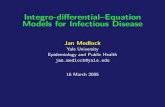
The behavior of the approximate solution using the proposedmethod with 𝑚 = 5, the approximate solution usingvariational iteration method (VIM), and the exact solutionare presented in Figure 1. Table 1 shows the behavior ofthe absolute error between exact solution and approximatesolution using the presented method at 𝑚 = 6 and 𝑚 = 8.FromFigure 1 andTable 1, it is clear that the proposedmethodcan be considered as an efficient method to solve the non-linear integro-differential equations. Table 1 indicates thatas 𝑚 increases the errors decrease more rapidly; hence, forbetter results, using number 𝑚 is recommended. Also, wecan conclude that the obtained approximated solution is inexcellent agreement with the exact solution.
Example 7. Consider the linear fourth-order integro-differential equation as in (1) and (2) with𝑓(𝑥) = 𝑥+(𝑥+3)𝑒𝑥,
2.8
2.6
2.4
2.2
2
1.8
1.6
1.4
1.2
1
0.80 0.2 0.4 0.6 0.8 1
𝑦(𝑥)
𝑥
Exact solution 𝑦(𝑥)Chebyshev solutionVIM solution
Figure 1: The behavior of the exact solution, the approximate solu-tion using VIM, and the approximate solution using the proposedmethod at𝑚 = 5.
𝛾 = 1, 𝑝(𝑡) = −1, ℎ(𝑡) = 0, and Θ(𝑦) = 𝑦(𝑥); then, theintegro-differential equation will be
𝑦(𝑖𝑣)
(𝑥) = 𝑥 + (𝑥 + 3) 𝑒𝑥
+ 𝑦 (𝑥)
− ∫𝑥
0
𝑦 (𝑡) 𝑑𝑡, 0 ≤ 𝑥 ≤ 1,
(47)
subject to the boundary conditions
𝑦 (0) = 1, (1) = 1 + 𝑒,
𝑦
(0) = 2, 𝑦
(1) = 3𝑒.(48)
The exact solution of this problem is 𝑦(𝑥) = 1 + 𝑥𝑒𝑥 [17].We apply the suggested method with 𝑚 = 5 and
approximate the solution 𝑦(𝑥) as follows:
𝑦 (𝑥) ≅
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥) . (49)
By the same procedure in the previous example, we have
5
∑𝑖=4
𝑖
∑𝑘=4
𝑐𝑖𝜆𝑖,𝑘,4
𝑥𝑘−4
𝑠
= 𝑓 (𝑥𝑠) +
5
∑𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑥𝑠) +
ℎ𝑠
2
× (Ω (𝑡0) + Ω (𝑡
𝐿) + 2
𝐿−1
∑𝑘=1
Ω(𝑡𝑘)) , 𝑠 = 0, 1, 2,
(50)
-
6 Mathematical Problems in Engineering
Table 1: The behavior of the absolute error between the exactsolution and approximate solution at𝑚 = 6 and𝑚 = 8.
𝑥 |𝑦ex. − 𝑦ap.| at𝑚 = 6 |𝑦ex. − 𝑦ap.| at𝑚 = 80.0 2.2548𝑒 − 10 2.0254𝑒 − 100.2 2.3654𝑒 − 04 1.2548𝑒 − 060.4 3.5687𝑒 − 04 3.2541𝑒 − 060.6 0.1587𝑒 − 04 5.2548𝑒 − 060.8 9.2450𝑒 − 04 7.2581𝑒 − 061.0 1.2589𝑒 − 10 2.2548𝑒 − 10
Table 2: The behaviour of the absolute error between the exactsolution and approximate solution at𝑚 = 7 and𝑚 = 9.
𝑥 |𝑦ex. − 𝑦ap.| at𝑚 = 7 |𝑦ex. − 𝑦ap.| at𝑚 = 90.0 1.2587𝑒 − 08 5.1236𝑒 − 090.2 6.2548𝑒 − 03 2.2258𝑒 − 050.4 2.0254𝑒 − 03 9.2154𝑒 − 050.6 1.3654𝑒 − 03 2.0054𝑒 − 050.8 0.2540𝑒 − 03 2.3690𝑒 − 051.0 6.0254𝑒 − 08 5.2478𝑒 − 09
where Ω(𝑡) = ∑5𝑛=0
𝑐𝑛𝑇∗
𝑛(𝑡), and the nodes 𝑡
𝑗+1= 𝑡𝑗+ ℎ𝑠, 𝑗 =
0, 1, . . . , 𝐿, 𝑡0
= 0, and ℎ𝑠= 𝑥𝑠/𝐿. We can write the initi-
alboundary conditions in the form
𝑐0− 𝑐1+ 𝑐2− 𝑐3+ 𝑐4− 𝑐5+ 𝑐6= 1,
𝑐0+ 𝑐1+ 𝑐2+ 𝑐3+ 𝑐4+ 𝑐5+ 𝑐6= 1 + 𝑒,
𝑙0𝑐0+ 𝑙1𝑐1+ 𝑙2𝑐2+ 𝑙3𝑐3+ 𝑙4𝑐4+ 𝑙5𝑐5+ 𝑙6𝑐6= 2,
𝑠0𝑐0+ 𝑠1𝑐1+ 𝑠2𝑐2+ 𝑠3𝑐3+ 𝑠4𝑐4+ 𝑠5𝑐5+ 𝑠6𝑐6= 3𝑒.
(51)
By using (50) and (51), we obtain a linear system of sevenalgebraic equations in the coefficients 𝑐
𝑛; by solving it using
the conjugate gradient method, we obtain
𝑐0= 2.09189, 𝑐
1= 1.32820, 𝑐
2= 0.26461,
𝑐3= 0.03079, 𝑐
4= 0.00264, 𝑐
5= 0.00015.
(52)
The behavior of the approximate solution using the proposedmethod with 𝑚 = 6, the approximate solution usingvariational iteration method (VIM) and the exact solutionare presented in Figure 2. Table 2 shows the behaviour ofthe absolute error between exact solution and approximatesolution using the presented method at 𝑚 = 7 and 𝑚 =9. From this figure, it is clear that the proposed methodcan be considered as an efficient method to solve the linearintegro-differential equations. Also, we can conclude that theobtained approximate solution is in excellent agreement withthe exact solution.
6. Conclusion and Discussion
Integro-differential equations are usually difficult to solveanalytically; so, it is required to obtain the approximate solu-tion. In this paper, we proposed the pseudospectral method
Exact solution 𝑦(𝑥)Chebyshev solutionVIM solution
4
3.5
3
2.5
2
1.5
1
0.50 0.2 0.4 0.6 0.8 1
𝑦(𝑥)
𝑥
Figure 2: The behavior of the exact solution, the approximate solu-tion using VIM, and the approximate solution using the proposedmethod at𝑚 = 6.
using shifted Chebyshev method for solving the integro-differential equations. The Chebyshev method is useful foracquiring both the general solution and particular solutionas demonstrated in examples. Special attention is given tostudy the convergence analysis and derive an upper boundof the error of the derived approximate formula. From ourobtained results, we can conclude that the proposed methodgives solutions in excellent agreement with the exact solutionand better than the other methods. An interesting featureof this method is that when an integral system has linearlyindependent polynomial solution of degree𝑚 or less than𝑚,themethod can be used for finding the analytical solution. Allcomputations are done using MATLAB 8.
References
[1] R. P. Agarwal, “Boundary value problems for higher orderintegro-differential equations,” Nonlinear Analysis: Theory,Methods & Applications, vol. 7, no. 3, pp. 259–270, 1983.
[2] E. Babolian, F. Fattahzadeh, and E. G. Raboky, “A Chebyshevapproximation for solving nonlinear integral equations ofHam-merstein type,”Applied Mathematics and Computation, vol. 189,no. 1, pp. 641–646, 2007.
[3] A. H. Borzabadi, A. V. Kamyad, and H. H. Mehne, “A differentapproach for solving the nonlinear Fredholm integral equationsof the second kind,”AppliedMathematics and Computation, vol.173, no. 2, pp. 724–735, 2006.
[4] M. M. Khader, “On the numerical solutions for the fractionaldiffusion equation,” Communications in Nonlinear Science andNumerical Simulation, vol. 16, no. 6, pp. 2535–2542, 2011.
[5] N. H. Sweilam, M. M. Khader, and A. M. Nagy, “Numericalsolution of two-sided space-fractional wave equation usingfinite difference method,” Journal of Computational and AppliedMathematics, vol. 235, no. 8, pp. 2832–2841, 2011.
-
Mathematical Problems in Engineering 7
[6] M. M. Khader, “Introducing an efficient modification of thevariational iteration method by using Chebyshev polynomials,”Applications and Applied Mathematics, vol. 7, no. 1, pp. 283–299,2012.
[7] N. H. Sweilam, “Fourth order integro-differential equationsusing variational iteration method,” Computers & Mathematicswith Applications, vol. 54, no. 7-8, pp. 1086–1091, 2007.
[8] M. M. Khader, “Introducing an efficient modification of thehomotopy perturbation method by using Chebyshev polyno-mials,” Arab Journal of Mathematical Sciences, vol. 18, no. 1, pp.61–71, 2012.
[9] N. H. Sweilam, M. M. Khader, and R. F. Al-Bar, “Homotopyperturbation method for linear and nonlinear system of frac-tional integro-differential equations,” International Journal ofComputational Mathematics and Numerical Simulation, vol. 1,no. 1, pp. 73–87, 2008.
[10] M. M. Khader and S. T. Mohamed, “Numerical treatmentfor first order neutral delay differential equations using splinefunctions,” EngineeringMathematics Letters, vol. 1, no. 1, pp. 32–43, 2012.
[11] S. T. Mohamed and M. M. Khader, “Numerical solutions to thesecond order Fredholm integro-differential equations using thespline functions expansion,” Global Journal of Pure and AppliedMathematics, vol. 34, pp. 21–29, 2011.
[12] M. M. Khader and A. S. Hendy, “The approximate and exactsolutions of the fractional-order delay differential equationsusing Legendre pseudo-spectral method,” International Journalof Pure and Applied Mathematics, vol. 74, no. 3, pp. 287–297,2012.
[13] M.M. Khader, N. H. Sweilam, and A.M. S. Mahdy, “An efficientnumerical method for solving the fractional difusion equation,”Journal of Applied Mathematics and Bioinformatics, vol. 1, no. 2,pp. 1–12, 2011.
[14] N. H. Sweilam, M. M. Khader, andW. Y. Kota, “On the numeri-cal solution of Hammerstein integral equations using Legendreapproximation,” International Journal of Applied MathematicalResearch, vol. 1, no. 1, pp. 65–76, 2012.
[15] S. Yousefi and M. Razzaghi, “Legendre wavelets method for thenonlinear Volterra-Fredholm integral equations,” Mathematicsand Computers in Simulation, vol. 70, no. 1, pp. 1–8, 2005.
[16] J. C. Mason and D. C. Handscomb, Chebyshev Polynomials,Chapman & Hall/CRC, Washington, DC, USA, 2003.
[17] M. Lakestani and M. Dehghan, “Numerical solution of fourth-order integro-differential equations using Chebyshev cardinalfunctions,” International Journal of Computer Mathematics, vol.87, no. 6, pp. 1389–1394, 2010.
[18] M. A. Snyder, Chebyshev Methods in Numerical Approximation,Prentice-Hall Inc., Englewood Cliffs, NJ, USA, 1966.
-
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of