Research Article - Hindawi Publishing...
16
Research Article Dynamic Analysis of Stochastic Lotka–Volterra Predator-Prey Model with Discrete Delays and Feedback Control Jinlei Liu 1 and Wencai Zhao 1,2 1 College of Mathematics and Systems Science, Shandong University of Science and Technology, Qingdao 266590, China 2 State Key Laboratory of Mining Disaster Prevention and Control Co-founded by Shandong Province and the Ministry of Science and Technology, Shandong University of Science and Technology, Qingdao 266590, China Correspondence should be addressed to Wencai Zhao; [email protected] Received 2 June 2019; Revised 26 September 2019; Accepted 24 October 2019; Published 16 November 2019 Academic Editor: Mahdi Jalili Copyright © 2019 Jinlei Liu and Wencai Zhao. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In this paper, a stochastic Lotka–Volterra predator-prey model with discrete delays and feedback control is studied. Firstly, the existence and uniqueness of global positive solution are proved. Further, we investigate the asymptotic property of stochastic system at the positive equilibrium point of the corresponding deterministic model and establish sufficient conditions for the persistence and extinction of the model. Finally, the correctness of the theoretical derivation is verified by numerical simulations. 1. Introduction In nature, time delays exist in many ecosystems [1–5]. For example, maturity stage is a common phenomenon in bi- ological population, and many diseases have a long in- cubation period. e mathematical model describing this phenomenon with time delay is called the delay differential equation. In 1999, Saito et al. [6] studied a Lotka–Volterra predator-prey model with discrete delays, which can be defined as follows: dx(t) dt x(t) r 1 + ax(t)+ αxt - τ 1 ( ) - βyt - τ 2 ( ) , dy(t) dt y(t) r 2 + ay(t)+ βxt - τ 1 ( ) + αyt - τ 2 ( ) , (1) where x(t) and y(t) stand for the population density of prey and predator at time t, respectively. r i (i 1, 2) rep- resent the intrinsic growth rate of corresponding pop- ulation. τ 1 and τ 2 are discrete time delays. a(a < 0), α and β are constants. Due to the environmental changes and increased human activities, many rare species are at risk of extinction. How to protect endangered species of floras and faunas and maintain the diversity of ecosystems is an important issue that needs to be solved urgently. In the process of marine fishery production, overfishing often results in the ex- haustion of fishery resources. It is rewarding for humans to develop and utilize the ecological system of the population rationally, which also contributes to the sustainability of the system [7–14]. In 2003, Gopalsamy and Weng [15] studied the following population competition model with feedback control: Hindawi Complexity Volume 2019, Article ID 4873290, 15 pages https://doi.org/10.1155/2019/4873290
Transcript of Research Article - Hindawi Publishing...

Research ArticleDynamic Analysis of Stochastic LotkandashVolterra Predator-PreyModel with Discrete Delays and Feedback Control
Jinlei Liu 1 and Wencai Zhao 12
1College of Mathematics and Systems Science Shandong University of Science and Technology Qingdao 266590 China2State Key Laboratory of Mining Disaster Prevention and Control Co-founded by Shandong Province and the Ministry of Scienceand Technology Shandong University of Science and Technology Qingdao 266590 China
Correspondence should be addressed to Wencai Zhao zhaowencaisdusteducn
Received 2 June 2019 Revised 26 September 2019 Accepted 24 October 2019 Published 16 November 2019
Academic Editor Mahdi Jalili
Copyright copy 2019 Jinlei Liu andWencai Zhao is is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
In this paper a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control is studied Firstlythe existence and uniqueness of global positive solution are proved Further we investigate the asymptotic property ofstochastic system at the positive equilibrium point of the corresponding deterministic model and establish sucientconditions for the persistence and extinction of the model Finally the correctness of the theoretical derivation is veried bynumerical simulations
1 Introduction
In nature time delays exist in many ecosystems [1ndash5] Forexample maturity stage is a common phenomenon in bi-ological population and many diseases have a long in-cubation period e mathematical model describing thisphenomenon with time delay is called the delay dierentialequation In 1999 Saito et al [6] studied a LotkandashVolterrapredator-prey model with discrete delays which can bedened as follows
dx(t)dt
x(t) r1 + ax(t) + αx t minus τ1( ) minus βy t minus τ2( )[ ]
dy(t)dt
y(t) r2 + ay(t) + βx t minus τ1( ) + αy t minus τ2( )[ ]
(1)
where x(t) and y(t) stand for the population density ofprey and predator at time t respectively ri(i 1 2) rep-resent the intrinsic growth rate of corresponding pop-ulation τ1 and τ2 are discrete time delays a(alt 0) α and βare constants
Due to the environmental changes and increased humanactivities many rare species are at risk of extinction How toprotect endangered species of oras and faunas andmaintain the diversity of ecosystems is an important issuethat needs to be solved urgently In the process of marineshery production overshing often results in the ex-haustion of shery resources It is rewarding for humans todevelop and utilize the ecological system of the populationrationally which also contributes to the sustainability of thesystem [7ndash14] In 2003 Gopalsamy and Weng [15] studiedthe following population competition model with feedbackcontrol
HindawiComplexityVolume 2019 Article ID 4873290 15 pageshttpsdoiorg10115520194873290
dx1(t)
dt x1(t) b1 minus a11x1(t) minus a12x2(t) minus α1u1(t minus τ)1113858 1113859
dx2(t)
dt x2(t) b2 minus a21x1(t) minus a22x2(t) minus α2u2(t minus τ)1113858 1113859
du1(t)
dt minus η1u1(t) + a1x1(t minus τ)
du2(t)
dt minus η2u2(t) + a2x2(t minus τ)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(2)
where u1(t) and u2(t) are the feedback control variablesbi gt 0 aij gt 0 αi gt 0 ηi gt 0 and ai gt 0 (i j 1 2) ey alsodiscussed the existence of positive equilibrium point andglobal attraction of the model In 2013 Li et al [16]introduced feedback control variables into the two-species competition system and discussed the extinctionand global attraction of equilibrium points ey foundthat if the two-species competition model is globallystable the system retains the stable property afteradding feedback controls and the position of equilib-rium point is changed If the two-species competitionmodel is extinct by choosing the suitable values offeedback control variables they can make extinct speciesbecome globally stable or still keep the property ofextinction In 2017 Shi et al [17] discussed a LotkandashVolterra predator-prey model with discrete delays andfeedback control as follows
dx1(t)
dt x1(t) r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859
dx2(t)
dt x2(t) r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
du(t)
dt minus eu(t) + fx2(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where u(t) is the feedback control variable e and f denotethe feedback control coefficients aii(i 1 2) denote theintraspecific competition rates aij(ine j i j 1 2) stand forthe capturing rates of the prey and predator populations τ1is the time of catching prey and τ2 is maturation delay ofpredator Shi et al [17] show that
(i) e solution (x1(t) x2(t) u(t)) of system (3) isultimately bounded
(ii) When the conditions (r1r2)gt (a12(a22 +(cfe)))
(a11a21)gt (a12a22) are established system (3) hasa unique globally asymptotically stable positiveequilibrium point (xlowast1 xlowast2 ulowast) where xlowast1 (e(r1a22minus r2a12) + r1cf)(e(a11a22 + a12a21) + cfa11) xlowast2
e(r2a11 + r1a21)(e(a11a22 + a12a21) + cfa11) andulowast (fe)xlowast2
In fact in nature ecosystems are inevitably affected byvarious environmental noises [18ndash28] Mathematical modelswith environmental disturbances can usually be described bystochastic differential equations Stochastic noise can gen-erally be divided into two categories one type is a smallnumber of strong interference usually called colored noiseor electrical noise which can be described by the Markovchain [29ndash31] the other type is the sum of many smallindependent random interference called white noise whichis usually represented by Brownian motion [32ndash35] Assumethat the populationrsquos intrinsic growth rate ri is disturbed bywhite noise
ri⟶ ri + σi_Bi(t) i 1 2 (4)
en model (3) is transformed intodx1(t) x1(t) r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859dt
+ σ1x1(t)dB1(t)
dx2(t) x2(t) r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859dt
+ σ2x2(t)dB2(t)
du(t) minus eu(t) + fx2(t)1113858 1113859dt
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
and satisfies the initial conditions
xi(θ) ϕi(θ)
u(θ) ψ(θ)
θ isin [minus τ 0]
i 1 2
(6)
where Bi(t) (i 1 2) denote the independent standardBrownian motion σ2i denote the intensity of white noiseτ max τ1 τ21113864 1113865 ϕi(0)gt 0 ψ(0)gt 0 and ϕi(θ) and ψ(θ) areboth nonnegative continuous functions on [minus τ 0]
Due to the interference of stochastic noise system (5)does not possess an equilibrium point An interestingquestion is Does model (5) still have stability What is theinfluence of white noise on system (5) is paper mainlystudies the dynamical properties of stochastic systems (5)also satisfying initial conditions (6) e second part provesthe suitability of the system e third part discusses theoscillation of the stochastic model near the positive equi-librium point (xlowast1 xlowast2 ulowast) of the corresponding
2 Complexity
deterministic model e fourth and fifth parts respectivelyobtain the conditions for the persistence and extinction ofthe stochastic system Finally the correctness of the theo-retical derivation is verified by numerical simulation
2 Existence and Uniqueness of GlobalPositive Solutions
e stochastic differential equation is expressed as
dx(t) f(x(t) t)dt + g(x(t) t)dB(t) x isin Rn (7)
If the Lyapunov function V(x t) isin C21[Rn times R+ R] thestochastic differential equation of V(x t) along system (7) isdefined as [36]
dV(x(t) t) 1113890Vt(x(t) t) + Vx(x(t) t)f(x(t) t)
+12tr g
T(x(t) t)Vxx(x(t) t)g(x(t) t)1113872 11138731113891dt
+ Vx(x(t) t)g(x(t) t)dB(t)as(8)
where LV Vt(x t) + Vx(x t)f(x t)+ (12)tr(gT(x t)
Vxx(x t)g(x t)) represent diffusion operator
Theorem 1 For any given initial condition (6) model (5)has a unique global positive solution (x1(t) x2(t) u(t)) andthe solution will remain in R3
+ with probability one
Proof Since the coefficients of system (5) satisfy the locallyLipschitz condition for any given initial condition (6)model (5) has a unique local positive solution (x1(t) x2(t)
u(t)) in interval t isin [0 τe) where τe is the explosiontime
To prove that this solution is global we only need toprove τe infin as Let k0 gt 0 be a sufficiently large constantfor any initial value x1(0) x2(0) and u(0) lying within theinternal [(1k0) k0] For each integer kge k0 define thestopping time
τk inf1113896t isin 0 τe1113858 1113857 min x1(t) x2(t) u(t)1113864 1113865
le1k
or max x1(t) x2(t) u(t)1113864 1113865ge k1113897
(9)
Obviously τk is increasing as k⟶infin Let τinfin
limk⟶infinτk therefore τinfin le τe as Now we need to verifyτinfin infin as Otherwise there are two constants Tgt 0 andϵ isin (0 1) such that P τinfin leT1113864 1113865gt ϵ So there is a positiveinteger k1 ge k0 such that
P τk leT1113864 1113865gt ϵ kge k1 (10)
Define a C2 minus functionV R3+⟶ R+ by
V x1 x2 u( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus ln x2( 1113857
+12a11 1113946
t
tminus τ2x21(s)ds
+ a12 1113946t
tminus τ1x2(s)ds +
a11a22c
2fa221
u2
+ u minus 1 minus ln u
V1 x1 x2( 1113857 + V2(u)
(11)
where
V1 x1 x2( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus lnx2( 1113857
+12
a11 1113946t
tminus τ2x21(s)ds + a12 1113946
t
tminus τ1x2(s)ds
V2(u) a11a22c
2fa221
u2
+ u minus 1 minus ln u
(12)
e nonnegativity of this function can be obtained from
x minus 1 minus lnxge 0 xgt 0 (13)
Applying Itorsquos formula yields
dV x1 x2 u( 1113857 LV x1 x2 u( 1113857dt + σ1 x1 minus 1( 1113857dB1(t)
+a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(14)
where
Complexity 3
LV LV1 + LV2
LV1 x1(t) minus 1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +12σ21 +
a11a22
a221
x2(t) minus 1( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
+a11a22
2a221
σ22 +12
a11x21(t) minus
12
a11x21 t minus τ2( 1113857 + a12x2(t) minus a12x2 t minus τ1( 1113857
r1 + a11( 1113857x1(t) minus12
a11x21(t) minus a12x1(t)x2 t minus τ1( 1113857 minus r1 +
12σ21 +
a11a22
a221
r2 + a22( 1113857x2(t) minus a22x22(t) minus cx2(t)u(t) + cu(t)1113960 1113961
+a11a22
a21x2(t) minus 1( 1113857x1 t minus τ2( 1113857 +
a11a22
a221
minus r2 +12σ221113874 1113875 minus
12
a11x21 t minus τ2( 1113857 + a12x2(t)
le r1 + a11( 1113857x1(t) minus12
a11x21(t) +
a11a22
a221
r2x2(t) minus12
a22x22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1 +
12σ21
+a11a22
a221
minus r2 +12σ22 +
12
a221113874 1113875
LV2 a11a22c
fa221
u(t) minus eu(t) + fx2(t)( 1113857 + 1 minus1
u(t)1113888 1113889 minus eu(t) + fx2(t)( 1113857
le minusa11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
(15)
erefore
LV LV1 + LV2
le r1 + a11( 1113857x1(t) minus12a11x
21(t) +
a11a22
a221
r2x2(t) minus12a22x
22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1
+12σ21 +
a11a22
a221
minus r2 +12σ22 +
12a221113874 1113875 minus
a11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
lemax minus12a11x
21(t) + r1 + a11( 1113857x1(t)1113882 1113883 +
a11a22
a221
max minus12a22x
22(t) + r2 +
a221 f + a12( 1113857
a11a221113888 1113889x2(t)1113896 1113897
+a11a22
a221
max minusce
fu2(t) + c minus
a221e
a11a221113888 1113889u(t)1113896 1113897 +
a11a22
a221
12a22 +
12σ22 minus r21113874 1113875 +
12σ21 + e minus r1
leK
(16)
where K is a positive constant So we get
dVleKdt + σ1 x1 minus 1( 1113857dB1(t) +a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(17)
Integrating (17) from 0 to τkandT and taking expectationon both sides we have
EV x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
leEV x1(0) x2(0) u(0)( 1113857 + KT(18)
Set Ωk τk leT1113864 1113865 and from inequality (10) we haveP(Ωk)ge ϵ Note that for every ω isin Ωk there is at least one ofx1(τkω) x2(τkω) or u(τkω) equaling either k or (1k)and then we have
4 Complexity
V x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
ge (k minus 1 minus ln k)and1k
minus 1 minus ln1k
1113874 1113875
(19)
It can be obtained by (18)
EV x1(0) x2(0) u(0)( 1113857 + KTgeE 1Ωk(ω)V x1 τkω( 1113857 x2 τkω( 1113857 u τkω( 1113857( 11138571113960 1113961
ge ε(k minus 1 minus ln k)and1k
minus 1 + ln k1113874 1113875
(20)
where 1Ωkis the indicator function of Ωk and letting
k⟶infin yields
infingtEV x1(0) x2(0) u(0)( 1113857 + KT infin (21)
is is a contradiction we must have τinfin infin and wehave completed the proof
3 Asymptotic Property
Due to the interference of white noise the solution of system(5) will have stochastic oscillation Next we discuss theasymptotic property of stochastic system at the positiveequilibrium point of the corresponding deterministic modelIn order to study the problem conveniently the hypothesis is
A1( 1113857 r1
r2gt
a12
a22 +(cfe)a11
a21gt
a12
a22 (22)
Theorem 2 For any given initial condition (6) if hypothesis(A1) is established the solution (x1(t) x2(t) u(t)) of system(5) has the property that
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2
+ u(θ) minus ulowast
( 111385721113891dθle
n
m
(23)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ
21
2+
a12fxlowast2σ22
2a21
(24)
where (xlowast1 xlowast2 ulowast) is the positive equilibrium point of thecorresponding deterministic model (3)
Proof Define the function
V x1 x2 u( 1113857 f x1 minus xlowast1 minus xlowast1 ln
x1
xlowast11113888 1113889 +
a12f
a21x2 minus x
lowast2 minus xlowast2 ln
x2
xlowast21113888 1113889 +
a12c
2a21u minus ulowast
( 11138572
+a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(25)
where ω1 and ω2 are positive constants Define
Complexity 5
V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
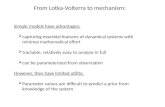
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

dx1(t)
dt x1(t) b1 minus a11x1(t) minus a12x2(t) minus α1u1(t minus τ)1113858 1113859
dx2(t)
dt x2(t) b2 minus a21x1(t) minus a22x2(t) minus α2u2(t minus τ)1113858 1113859
du1(t)
dt minus η1u1(t) + a1x1(t minus τ)
du2(t)
dt minus η2u2(t) + a2x2(t minus τ)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(2)
where u1(t) and u2(t) are the feedback control variablesbi gt 0 aij gt 0 αi gt 0 ηi gt 0 and ai gt 0 (i j 1 2) ey alsodiscussed the existence of positive equilibrium point andglobal attraction of the model In 2013 Li et al [16]introduced feedback control variables into the two-species competition system and discussed the extinctionand global attraction of equilibrium points ey foundthat if the two-species competition model is globallystable the system retains the stable property afteradding feedback controls and the position of equilib-rium point is changed If the two-species competitionmodel is extinct by choosing the suitable values offeedback control variables they can make extinct speciesbecome globally stable or still keep the property ofextinction In 2017 Shi et al [17] discussed a LotkandashVolterra predator-prey model with discrete delays andfeedback control as follows
dx1(t)
dt x1(t) r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859
dx2(t)
dt x2(t) r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
du(t)
dt minus eu(t) + fx2(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where u(t) is the feedback control variable e and f denotethe feedback control coefficients aii(i 1 2) denote theintraspecific competition rates aij(ine j i j 1 2) stand forthe capturing rates of the prey and predator populations τ1is the time of catching prey and τ2 is maturation delay ofpredator Shi et al [17] show that
(i) e solution (x1(t) x2(t) u(t)) of system (3) isultimately bounded
(ii) When the conditions (r1r2)gt (a12(a22 +(cfe)))
(a11a21)gt (a12a22) are established system (3) hasa unique globally asymptotically stable positiveequilibrium point (xlowast1 xlowast2 ulowast) where xlowast1 (e(r1a22minus r2a12) + r1cf)(e(a11a22 + a12a21) + cfa11) xlowast2
e(r2a11 + r1a21)(e(a11a22 + a12a21) + cfa11) andulowast (fe)xlowast2
In fact in nature ecosystems are inevitably affected byvarious environmental noises [18ndash28] Mathematical modelswith environmental disturbances can usually be described bystochastic differential equations Stochastic noise can gen-erally be divided into two categories one type is a smallnumber of strong interference usually called colored noiseor electrical noise which can be described by the Markovchain [29ndash31] the other type is the sum of many smallindependent random interference called white noise whichis usually represented by Brownian motion [32ndash35] Assumethat the populationrsquos intrinsic growth rate ri is disturbed bywhite noise
ri⟶ ri + σi_Bi(t) i 1 2 (4)
en model (3) is transformed intodx1(t) x1(t) r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859dt
+ σ1x1(t)dB1(t)
dx2(t) x2(t) r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859dt
+ σ2x2(t)dB2(t)
du(t) minus eu(t) + fx2(t)1113858 1113859dt
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
and satisfies the initial conditions
xi(θ) ϕi(θ)
u(θ) ψ(θ)
θ isin [minus τ 0]
i 1 2
(6)
where Bi(t) (i 1 2) denote the independent standardBrownian motion σ2i denote the intensity of white noiseτ max τ1 τ21113864 1113865 ϕi(0)gt 0 ψ(0)gt 0 and ϕi(θ) and ψ(θ) areboth nonnegative continuous functions on [minus τ 0]
Due to the interference of stochastic noise system (5)does not possess an equilibrium point An interestingquestion is Does model (5) still have stability What is theinfluence of white noise on system (5) is paper mainlystudies the dynamical properties of stochastic systems (5)also satisfying initial conditions (6) e second part provesthe suitability of the system e third part discusses theoscillation of the stochastic model near the positive equi-librium point (xlowast1 xlowast2 ulowast) of the corresponding
2 Complexity
deterministic model e fourth and fifth parts respectivelyobtain the conditions for the persistence and extinction ofthe stochastic system Finally the correctness of the theo-retical derivation is verified by numerical simulation
2 Existence and Uniqueness of GlobalPositive Solutions
e stochastic differential equation is expressed as
dx(t) f(x(t) t)dt + g(x(t) t)dB(t) x isin Rn (7)
If the Lyapunov function V(x t) isin C21[Rn times R+ R] thestochastic differential equation of V(x t) along system (7) isdefined as [36]
dV(x(t) t) 1113890Vt(x(t) t) + Vx(x(t) t)f(x(t) t)
+12tr g
T(x(t) t)Vxx(x(t) t)g(x(t) t)1113872 11138731113891dt
+ Vx(x(t) t)g(x(t) t)dB(t)as(8)
where LV Vt(x t) + Vx(x t)f(x t)+ (12)tr(gT(x t)
Vxx(x t)g(x t)) represent diffusion operator
Theorem 1 For any given initial condition (6) model (5)has a unique global positive solution (x1(t) x2(t) u(t)) andthe solution will remain in R3
+ with probability one
Proof Since the coefficients of system (5) satisfy the locallyLipschitz condition for any given initial condition (6)model (5) has a unique local positive solution (x1(t) x2(t)
u(t)) in interval t isin [0 τe) where τe is the explosiontime
To prove that this solution is global we only need toprove τe infin as Let k0 gt 0 be a sufficiently large constantfor any initial value x1(0) x2(0) and u(0) lying within theinternal [(1k0) k0] For each integer kge k0 define thestopping time
τk inf1113896t isin 0 τe1113858 1113857 min x1(t) x2(t) u(t)1113864 1113865
le1k
or max x1(t) x2(t) u(t)1113864 1113865ge k1113897
(9)
Obviously τk is increasing as k⟶infin Let τinfin
limk⟶infinτk therefore τinfin le τe as Now we need to verifyτinfin infin as Otherwise there are two constants Tgt 0 andϵ isin (0 1) such that P τinfin leT1113864 1113865gt ϵ So there is a positiveinteger k1 ge k0 such that
P τk leT1113864 1113865gt ϵ kge k1 (10)
Define a C2 minus functionV R3+⟶ R+ by
V x1 x2 u( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus ln x2( 1113857
+12a11 1113946
t
tminus τ2x21(s)ds
+ a12 1113946t
tminus τ1x2(s)ds +
a11a22c
2fa221
u2
+ u minus 1 minus ln u
V1 x1 x2( 1113857 + V2(u)
(11)
where
V1 x1 x2( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus lnx2( 1113857
+12
a11 1113946t
tminus τ2x21(s)ds + a12 1113946
t
tminus τ1x2(s)ds
V2(u) a11a22c
2fa221
u2
+ u minus 1 minus ln u
(12)
e nonnegativity of this function can be obtained from
x minus 1 minus lnxge 0 xgt 0 (13)
Applying Itorsquos formula yields
dV x1 x2 u( 1113857 LV x1 x2 u( 1113857dt + σ1 x1 minus 1( 1113857dB1(t)
+a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(14)
where
Complexity 3
LV LV1 + LV2
LV1 x1(t) minus 1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +12σ21 +
a11a22
a221
x2(t) minus 1( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
+a11a22
2a221
σ22 +12
a11x21(t) minus
12
a11x21 t minus τ2( 1113857 + a12x2(t) minus a12x2 t minus τ1( 1113857
r1 + a11( 1113857x1(t) minus12
a11x21(t) minus a12x1(t)x2 t minus τ1( 1113857 minus r1 +
12σ21 +
a11a22
a221
r2 + a22( 1113857x2(t) minus a22x22(t) minus cx2(t)u(t) + cu(t)1113960 1113961
+a11a22
a21x2(t) minus 1( 1113857x1 t minus τ2( 1113857 +
a11a22
a221
minus r2 +12σ221113874 1113875 minus
12
a11x21 t minus τ2( 1113857 + a12x2(t)
le r1 + a11( 1113857x1(t) minus12
a11x21(t) +
a11a22
a221
r2x2(t) minus12
a22x22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1 +
12σ21
+a11a22
a221
minus r2 +12σ22 +
12
a221113874 1113875
LV2 a11a22c
fa221
u(t) minus eu(t) + fx2(t)( 1113857 + 1 minus1
u(t)1113888 1113889 minus eu(t) + fx2(t)( 1113857
le minusa11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
(15)
erefore
LV LV1 + LV2
le r1 + a11( 1113857x1(t) minus12a11x
21(t) +
a11a22
a221
r2x2(t) minus12a22x
22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1
+12σ21 +
a11a22
a221
minus r2 +12σ22 +
12a221113874 1113875 minus
a11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
lemax minus12a11x
21(t) + r1 + a11( 1113857x1(t)1113882 1113883 +
a11a22
a221
max minus12a22x
22(t) + r2 +
a221 f + a12( 1113857
a11a221113888 1113889x2(t)1113896 1113897
+a11a22
a221
max minusce
fu2(t) + c minus
a221e
a11a221113888 1113889u(t)1113896 1113897 +
a11a22
a221
12a22 +
12σ22 minus r21113874 1113875 +
12σ21 + e minus r1
leK
(16)
where K is a positive constant So we get
dVleKdt + σ1 x1 minus 1( 1113857dB1(t) +a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(17)
Integrating (17) from 0 to τkandT and taking expectationon both sides we have
EV x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
leEV x1(0) x2(0) u(0)( 1113857 + KT(18)
Set Ωk τk leT1113864 1113865 and from inequality (10) we haveP(Ωk)ge ϵ Note that for every ω isin Ωk there is at least one ofx1(τkω) x2(τkω) or u(τkω) equaling either k or (1k)and then we have
4 Complexity
V x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
ge (k minus 1 minus ln k)and1k
minus 1 minus ln1k
1113874 1113875
(19)
It can be obtained by (18)
EV x1(0) x2(0) u(0)( 1113857 + KTgeE 1Ωk(ω)V x1 τkω( 1113857 x2 τkω( 1113857 u τkω( 1113857( 11138571113960 1113961
ge ε(k minus 1 minus ln k)and1k
minus 1 + ln k1113874 1113875
(20)
where 1Ωkis the indicator function of Ωk and letting
k⟶infin yields
infingtEV x1(0) x2(0) u(0)( 1113857 + KT infin (21)
is is a contradiction we must have τinfin infin and wehave completed the proof
3 Asymptotic Property
Due to the interference of white noise the solution of system(5) will have stochastic oscillation Next we discuss theasymptotic property of stochastic system at the positiveequilibrium point of the corresponding deterministic modelIn order to study the problem conveniently the hypothesis is
A1( 1113857 r1
r2gt
a12
a22 +(cfe)a11
a21gt
a12
a22 (22)
Theorem 2 For any given initial condition (6) if hypothesis(A1) is established the solution (x1(t) x2(t) u(t)) of system(5) has the property that
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2
+ u(θ) minus ulowast
( 111385721113891dθle
n
m
(23)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ
21
2+
a12fxlowast2σ22
2a21
(24)
where (xlowast1 xlowast2 ulowast) is the positive equilibrium point of thecorresponding deterministic model (3)
Proof Define the function
V x1 x2 u( 1113857 f x1 minus xlowast1 minus xlowast1 ln
x1
xlowast11113888 1113889 +
a12f
a21x2 minus x
lowast2 minus xlowast2 ln
x2
xlowast21113888 1113889 +
a12c
2a21u minus ulowast
( 11138572
+a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(25)
where ω1 and ω2 are positive constants Define
Complexity 5
V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

deterministic model e fourth and fifth parts respectivelyobtain the conditions for the persistence and extinction ofthe stochastic system Finally the correctness of the theo-retical derivation is verified by numerical simulation
2 Existence and Uniqueness of GlobalPositive Solutions
e stochastic differential equation is expressed as
dx(t) f(x(t) t)dt + g(x(t) t)dB(t) x isin Rn (7)
If the Lyapunov function V(x t) isin C21[Rn times R+ R] thestochastic differential equation of V(x t) along system (7) isdefined as [36]
dV(x(t) t) 1113890Vt(x(t) t) + Vx(x(t) t)f(x(t) t)
+12tr g
T(x(t) t)Vxx(x(t) t)g(x(t) t)1113872 11138731113891dt
+ Vx(x(t) t)g(x(t) t)dB(t)as(8)
where LV Vt(x t) + Vx(x t)f(x t)+ (12)tr(gT(x t)
Vxx(x t)g(x t)) represent diffusion operator
Theorem 1 For any given initial condition (6) model (5)has a unique global positive solution (x1(t) x2(t) u(t)) andthe solution will remain in R3
+ with probability one
Proof Since the coefficients of system (5) satisfy the locallyLipschitz condition for any given initial condition (6)model (5) has a unique local positive solution (x1(t) x2(t)
u(t)) in interval t isin [0 τe) where τe is the explosiontime
To prove that this solution is global we only need toprove τe infin as Let k0 gt 0 be a sufficiently large constantfor any initial value x1(0) x2(0) and u(0) lying within theinternal [(1k0) k0] For each integer kge k0 define thestopping time
τk inf1113896t isin 0 τe1113858 1113857 min x1(t) x2(t) u(t)1113864 1113865
le1k
or max x1(t) x2(t) u(t)1113864 1113865ge k1113897
(9)
Obviously τk is increasing as k⟶infin Let τinfin
limk⟶infinτk therefore τinfin le τe as Now we need to verifyτinfin infin as Otherwise there are two constants Tgt 0 andϵ isin (0 1) such that P τinfin leT1113864 1113865gt ϵ So there is a positiveinteger k1 ge k0 such that
P τk leT1113864 1113865gt ϵ kge k1 (10)
Define a C2 minus functionV R3+⟶ R+ by
V x1 x2 u( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus ln x2( 1113857
+12a11 1113946
t
tminus τ2x21(s)ds
+ a12 1113946t
tminus τ1x2(s)ds +
a11a22c
2fa221
u2
+ u minus 1 minus ln u
V1 x1 x2( 1113857 + V2(u)
(11)
where
V1 x1 x2( 1113857 x1 minus 1 minus lnx1 +a11a22
a221
x2 minus 1 minus lnx2( 1113857
+12
a11 1113946t
tminus τ2x21(s)ds + a12 1113946
t
tminus τ1x2(s)ds
V2(u) a11a22c
2fa221
u2
+ u minus 1 minus ln u
(12)
e nonnegativity of this function can be obtained from
x minus 1 minus lnxge 0 xgt 0 (13)
Applying Itorsquos formula yields
dV x1 x2 u( 1113857 LV x1 x2 u( 1113857dt + σ1 x1 minus 1( 1113857dB1(t)
+a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(14)
where
Complexity 3
LV LV1 + LV2
LV1 x1(t) minus 1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +12σ21 +
a11a22
a221
x2(t) minus 1( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
+a11a22
2a221
σ22 +12
a11x21(t) minus
12
a11x21 t minus τ2( 1113857 + a12x2(t) minus a12x2 t minus τ1( 1113857
r1 + a11( 1113857x1(t) minus12
a11x21(t) minus a12x1(t)x2 t minus τ1( 1113857 minus r1 +
12σ21 +
a11a22
a221
r2 + a22( 1113857x2(t) minus a22x22(t) minus cx2(t)u(t) + cu(t)1113960 1113961
+a11a22
a21x2(t) minus 1( 1113857x1 t minus τ2( 1113857 +
a11a22
a221
minus r2 +12σ221113874 1113875 minus
12
a11x21 t minus τ2( 1113857 + a12x2(t)
le r1 + a11( 1113857x1(t) minus12
a11x21(t) +
a11a22
a221
r2x2(t) minus12
a22x22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1 +
12σ21
+a11a22
a221
minus r2 +12σ22 +
12
a221113874 1113875
LV2 a11a22c
fa221
u(t) minus eu(t) + fx2(t)( 1113857 + 1 minus1
u(t)1113888 1113889 minus eu(t) + fx2(t)( 1113857
le minusa11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
(15)
erefore
LV LV1 + LV2
le r1 + a11( 1113857x1(t) minus12a11x
21(t) +
a11a22
a221
r2x2(t) minus12a22x
22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1
+12σ21 +
a11a22
a221
minus r2 +12σ22 +
12a221113874 1113875 minus
a11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
lemax minus12a11x
21(t) + r1 + a11( 1113857x1(t)1113882 1113883 +
a11a22
a221
max minus12a22x
22(t) + r2 +
a221 f + a12( 1113857
a11a221113888 1113889x2(t)1113896 1113897
+a11a22
a221
max minusce
fu2(t) + c minus
a221e
a11a221113888 1113889u(t)1113896 1113897 +
a11a22
a221
12a22 +
12σ22 minus r21113874 1113875 +
12σ21 + e minus r1
leK
(16)
where K is a positive constant So we get
dVleKdt + σ1 x1 minus 1( 1113857dB1(t) +a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(17)
Integrating (17) from 0 to τkandT and taking expectationon both sides we have
EV x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
leEV x1(0) x2(0) u(0)( 1113857 + KT(18)
Set Ωk τk leT1113864 1113865 and from inequality (10) we haveP(Ωk)ge ϵ Note that for every ω isin Ωk there is at least one ofx1(τkω) x2(τkω) or u(τkω) equaling either k or (1k)and then we have
4 Complexity
V x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
ge (k minus 1 minus ln k)and1k
minus 1 minus ln1k
1113874 1113875
(19)
It can be obtained by (18)
EV x1(0) x2(0) u(0)( 1113857 + KTgeE 1Ωk(ω)V x1 τkω( 1113857 x2 τkω( 1113857 u τkω( 1113857( 11138571113960 1113961
ge ε(k minus 1 minus ln k)and1k
minus 1 + ln k1113874 1113875
(20)
where 1Ωkis the indicator function of Ωk and letting
k⟶infin yields
infingtEV x1(0) x2(0) u(0)( 1113857 + KT infin (21)
is is a contradiction we must have τinfin infin and wehave completed the proof
3 Asymptotic Property
Due to the interference of white noise the solution of system(5) will have stochastic oscillation Next we discuss theasymptotic property of stochastic system at the positiveequilibrium point of the corresponding deterministic modelIn order to study the problem conveniently the hypothesis is
A1( 1113857 r1
r2gt
a12
a22 +(cfe)a11
a21gt
a12
a22 (22)
Theorem 2 For any given initial condition (6) if hypothesis(A1) is established the solution (x1(t) x2(t) u(t)) of system(5) has the property that
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2
+ u(θ) minus ulowast
( 111385721113891dθle
n
m
(23)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ
21
2+
a12fxlowast2σ22
2a21
(24)
where (xlowast1 xlowast2 ulowast) is the positive equilibrium point of thecorresponding deterministic model (3)
Proof Define the function
V x1 x2 u( 1113857 f x1 minus xlowast1 minus xlowast1 ln
x1
xlowast11113888 1113889 +
a12f
a21x2 minus x
lowast2 minus xlowast2 ln
x2
xlowast21113888 1113889 +
a12c
2a21u minus ulowast
( 11138572
+a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(25)
where ω1 and ω2 are positive constants Define
Complexity 5
V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

LV LV1 + LV2
LV1 x1(t) minus 1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +12σ21 +
a11a22
a221
x2(t) minus 1( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859
+a11a22
2a221
σ22 +12
a11x21(t) minus
12
a11x21 t minus τ2( 1113857 + a12x2(t) minus a12x2 t minus τ1( 1113857
r1 + a11( 1113857x1(t) minus12
a11x21(t) minus a12x1(t)x2 t minus τ1( 1113857 minus r1 +
12σ21 +
a11a22
a221
r2 + a22( 1113857x2(t) minus a22x22(t) minus cx2(t)u(t) + cu(t)1113960 1113961
+a11a22
a21x2(t) minus 1( 1113857x1 t minus τ2( 1113857 +
a11a22
a221
minus r2 +12σ221113874 1113875 minus
12
a11x21 t minus τ2( 1113857 + a12x2(t)
le r1 + a11( 1113857x1(t) minus12
a11x21(t) +
a11a22
a221
r2x2(t) minus12
a22x22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1 +
12σ21
+a11a22
a221
minus r2 +12σ22 +
12
a221113874 1113875
LV2 a11a22c
fa221
u(t) minus eu(t) + fx2(t)( 1113857 + 1 minus1
u(t)1113888 1113889 minus eu(t) + fx2(t)( 1113857
le minusa11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
(15)
erefore
LV LV1 + LV2
le r1 + a11( 1113857x1(t) minus12a11x
21(t) +
a11a22
a221
r2x2(t) minus12a22x
22(t) minus cx2(t)u(t) + cu(t)1113876 1113877 + a12x2(t) minus r1
+12σ21 +
a11a22
a221
minus r2 +12σ22 +
12a221113874 1113875 minus
a11a22ce
fa221
u2(t) +
a11a22c
a221
u(t)x2(t) minus eu(t) + fx2(t) + e
lemax minus12a11x
21(t) + r1 + a11( 1113857x1(t)1113882 1113883 +
a11a22
a221
max minus12a22x
22(t) + r2 +
a221 f + a12( 1113857
a11a221113888 1113889x2(t)1113896 1113897
+a11a22
a221
max minusce
fu2(t) + c minus
a221e
a11a221113888 1113889u(t)1113896 1113897 +
a11a22
a221
12a22 +
12σ22 minus r21113874 1113875 +
12σ21 + e minus r1
leK
(16)
where K is a positive constant So we get
dVleKdt + σ1 x1 minus 1( 1113857dB1(t) +a11a22
a221
σ2 x2 minus 1( 1113857dB2(t)
(17)
Integrating (17) from 0 to τkandT and taking expectationon both sides we have
EV x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
leEV x1(0) x2(0) u(0)( 1113857 + KT(18)
Set Ωk τk leT1113864 1113865 and from inequality (10) we haveP(Ωk)ge ϵ Note that for every ω isin Ωk there is at least one ofx1(τkω) x2(τkω) or u(τkω) equaling either k or (1k)and then we have
4 Complexity
V x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
ge (k minus 1 minus ln k)and1k
minus 1 minus ln1k
1113874 1113875
(19)
It can be obtained by (18)
EV x1(0) x2(0) u(0)( 1113857 + KTgeE 1Ωk(ω)V x1 τkω( 1113857 x2 τkω( 1113857 u τkω( 1113857( 11138571113960 1113961
ge ε(k minus 1 minus ln k)and1k
minus 1 + ln k1113874 1113875
(20)
where 1Ωkis the indicator function of Ωk and letting
k⟶infin yields
infingtEV x1(0) x2(0) u(0)( 1113857 + KT infin (21)
is is a contradiction we must have τinfin infin and wehave completed the proof
3 Asymptotic Property
Due to the interference of white noise the solution of system(5) will have stochastic oscillation Next we discuss theasymptotic property of stochastic system at the positiveequilibrium point of the corresponding deterministic modelIn order to study the problem conveniently the hypothesis is
A1( 1113857 r1
r2gt
a12
a22 +(cfe)a11
a21gt
a12
a22 (22)
Theorem 2 For any given initial condition (6) if hypothesis(A1) is established the solution (x1(t) x2(t) u(t)) of system(5) has the property that
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2
+ u(θ) minus ulowast
( 111385721113891dθle
n
m
(23)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ
21
2+
a12fxlowast2σ22
2a21
(24)
where (xlowast1 xlowast2 ulowast) is the positive equilibrium point of thecorresponding deterministic model (3)
Proof Define the function
V x1 x2 u( 1113857 f x1 minus xlowast1 minus xlowast1 ln
x1
xlowast11113888 1113889 +
a12f
a21x2 minus x
lowast2 minus xlowast2 ln
x2
xlowast21113888 1113889 +
a12c
2a21u minus ulowast
( 11138572
+a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(25)
where ω1 and ω2 are positive constants Define
Complexity 5
V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

V x1 τk andT( 1113857 x2 τk andT( 1113857 u τk andT( 1113857( 1113857
ge (k minus 1 minus ln k)and1k
minus 1 minus ln1k
1113874 1113875
(19)
It can be obtained by (18)
EV x1(0) x2(0) u(0)( 1113857 + KTgeE 1Ωk(ω)V x1 τkω( 1113857 x2 τkω( 1113857 u τkω( 1113857( 11138571113960 1113961
ge ε(k minus 1 minus ln k)and1k
minus 1 + ln k1113874 1113875
(20)
where 1Ωkis the indicator function of Ωk and letting
k⟶infin yields
infingtEV x1(0) x2(0) u(0)( 1113857 + KT infin (21)
is is a contradiction we must have τinfin infin and wehave completed the proof
3 Asymptotic Property
Due to the interference of white noise the solution of system(5) will have stochastic oscillation Next we discuss theasymptotic property of stochastic system at the positiveequilibrium point of the corresponding deterministic modelIn order to study the problem conveniently the hypothesis is
A1( 1113857 r1
r2gt
a12
a22 +(cfe)a11
a21gt
a12
a22 (22)
Theorem 2 For any given initial condition (6) if hypothesis(A1) is established the solution (x1(t) x2(t) u(t)) of system(5) has the property that
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2
+ u(θ) minus ulowast
( 111385721113891dθle
n
m
(23)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ
21
2+
a12fxlowast2σ22
2a21
(24)
where (xlowast1 xlowast2 ulowast) is the positive equilibrium point of thecorresponding deterministic model (3)
Proof Define the function
V x1 x2 u( 1113857 f x1 minus xlowast1 minus xlowast1 ln
x1
xlowast11113888 1113889 +
a12f
a21x2 minus x
lowast2 minus xlowast2 ln
x2
xlowast21113888 1113889 +
a12c
2a21u minus ulowast
( 11138572
+a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(25)
where ω1 and ω2 are positive constants Define
Complexity 5
V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

V1 x1 minus xlowast1 minus xlowast1 ln
x1
xlowast1
V2 x2 minus xlowast2 minus xlowast2 ln
x2
xlowast2
V3 u minus ulowast
( 11138572
V4 a12f
2ω21113946
t
tminus τ2x1(s) minus x
lowast1( 1113857
2ds +a12fω1
21113946
t
tminus τ1x2(s) minus x
lowast2( 1113857
2ds
(26)
By Itorsquos formula we obtain
dV1 LV1dt + x1 minus xlowast1( 1113857σ1dB1(t) (27)
where
LV1 x1(t) minus xlowast1( 1113857 r1 minus a11x1(t) minus a12x2 t minus τ1( 11138571113858 1113859 +
12xlowast1σ
21
x1(t) minus xlowast1( 1113857 minus a11 x1(t) minus x
lowast1( 1113857 minus a12 x2 t minus τ1( 1113857 minus x
lowast2( 11138571113858 1113859 +
12xlowast1σ
21
le minus a11 x1(t) minus xlowast1( 1113857
2+
a12
2ω1x1(t) minus x
lowast1( 1113857
2+
a12ω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12xlowast1σ
21
(28)
Similarly
dV2 LV2dt + x2 minus xlowast2( 1113857σ2dB2(t) (29)
where
LV2 x2(t) minus xlowast2( 1113857 r2 + a21x1 t minus τ2( 1113857 minus a22x2(t) minus cu(t)1113858 1113859 +
12xlowast2σ
22
x2(t) minus xlowast2( 1113857 a21 x1 t minus τ2( 1113857 minus x
lowast1( 1113857 minus a22 x2(t) minus x
lowast2( 1113857 minus c u(t) minus u
lowast( 11138571113858 1113859 +
12xlowast2σ
22
lea21
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a21ω2
2x2(t) minus x
lowast2( 1113857
2minus a22 x2(t) minus x
lowast2( 1113857
2minus c x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857 +
12xlowast2σ
22
(30)
In the same way
dV3 2 u(t) minus ulowast
( 1113857 minus eu(t) + fx2(t)( 1113857dt
minus 2e u(t) minus ulowast
( 11138572
+ 2f u(t) minus ulowast
( 1113857 x2(t) minus xlowast2( 11138571113960 1113961dt
dV4 a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
21113890 1113891dt
(31)
6 Complexity
erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

erefore we have
LV fLV1 +a12f
a21LV2 +
a12c
2a21
dV3
dt+dV4
dt
le minus a11f x1(t) minus xlowast1( 1113857
2+
a12f
2ω1x1(t) minus x
lowast1( 1113857
2+
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2+12
fxlowast1σ
21
+a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2+
a12fω2
2x2(t) minus x
lowast2( 1113857
2minus
a12a22f
a21x2(t) minus x
lowast2( 1113857
2minus
a12cf
a21x2(t) minus x
lowast2( 1113857 u(t) minus u
lowast( 1113857
+a12fxlowast22a21
σ22 minusa12ce
a21u(t) minus u
lowast( 1113857
2+
a12cf
a21u(t) minus u
lowast( 1113857 x2(t) minus x
lowast2( 1113857 +
a12f
2ω2x1(t) minus x
lowast1( 1113857
2minus
a12f
2ω2x1 t minus τ2( 1113857 minus x
lowast1( 1113857
2
+a12fω1
2x2(t) minus x
lowast2( 1113857
2minus
a12fω1
2x2 t minus τ1( 1113857 minus x
lowast2( 1113857
2
minus f a11 minusa12
2ω1minus
a12
2ω21113888 1113889 x1(t) minus x
lowast1( 1113857
2minus f
a12a22
a21minus
a12ω2
2minus
a12ω1
21113888 1113889 x2(t) minus x
lowast2( 1113857
2minus
a12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21
+a12fxlowast22a21
σ22
(32)
Let ω1 ω2 ((a11a22 + a12a21)2a11a21) we obtain
LVle minusa11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(t) minus x
lowast1( 1113857
2minus
a12f a11a22 minus a12a21( 1113857
2a11a21x2(t) minus x
lowast2( 1113857
2
minusa12ce
a21u(t) minus u
lowast( 1113857
2+
fxlowast12
σ21 +a12fxlowast22a21
σ22
(33)
erefore
dV x1 x2 u( 1113857 LVdt + f x1 minus xlowast1( 1113857σ1dB1(t)
+a12f
a21x2 minus x
lowast2( 1113857σ2dB2(t)
(34)
Integrate both sides of (18) from 0 to t and take theexpectation and then we get
EV(t) minus EV(0)le minus E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
minus E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ minus E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ +fxlowast1σ
21t
2+
a12fxlowast2σ22t
2a21
(35)
Divide both sides by t and take the limit superior andthen we have
Complexity 7
lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

lim supt⟶+infin
1t
E 1113946t
0
a11f a11a22 minus a12a21( 1113857
a11a22 + a12a21x1(θ) minus x
lowast1( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12f a11a22 minus a12a21( 1113857
2a11a21x2(θ) minus x
lowast2( 1113857
2dθ
+ lim supt⟶+infin
1t
E 1113946t
0
a12ce
a21u(θ) minus u
lowast( 1113857
2dθ lefxlowast1σ21
2+
a12fxlowast2σ222a21
(36)
Obviously
lim supt⟶+infin
1t
E 1113946t
01113890 x1(θ) minus x
lowast1( 1113857
2+ x2(θ) minus x
lowast2( 1113857
2+ u(θ) minus u
lowast( 1113857
21113891dθle
n
m (37)
where
m mina11f a11a22 minus a12a21( 1113857
a11a22 + a12a21a12f a11a22 minus a12a21( 1113857
2a11a21a12ce
a211113896 1113897
n fxlowast1σ21
2+
a12fxlowast2σ222a21
(38)
We have completed the proofeorem 2 shows that if the condition (A1) holds the
solution oscillates around the equilibrium point xlowast and theamplitude of oscillation is positively correlated with theintensity σ21 and σ22 of environmental noise In particular ifσ21 σ22 0 the influence of environmental noise is nottaken into account
x1(t)⟶ xlowast1 x2(t)⟶ x
lowast2 u(t)⟶ u
lowast for t⟶ +infin
(39)
e equilibrium point xlowast is globally asymptoticallystable is is the conclusion of reference [17]
4 Persistence
In nature whether ecosystems can survive or not is our mainconcern Before discussing the persistence of stochasticsystem we give the following assumption
A2( 1113857 μ max σ1 σ2( 1113857ltmin xlowast1
m
n0
1113970
xlowast2
m
n0
1113970
ulowast
m
n0
1113970
1113896 1113897 n0 fxlowast12
+a12fxlowast22a21
(40)
Theorem 3 For any given initial condition (6) if as-sumptions (A1) and (A2) hold at the same time the solution(x1(t) x2(t) u(t)) of system (5) is persistent that
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθ gt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(41)
Proof According to (37) we have
lim supt⟶+infin
1t
E 1113946t
0x1(θ) minus x
lowast1( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0x2(θ) minus x
lowast2( 1113857
21113960 1113961dθle
n
m
lim supt⟶+infin
1t
E 1113946t
0u(θ) minus u
lowast( 1113857
21113960 1113961dθle
n
m
(42)
As we know x1(t)ge 0 and xlowast1 gt 0 from 2x1(t)xlowast1ge (xlowast1 )2 minus (x1(t) minus xlowast1 )2 one can get
8 Complexity
x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

x1(t)gexlowast12
minusx1(t) minus xlowast1( 1113857
2
2xlowast1 (43)
By the condition μltxlowast1mn0
1113968 we have
lim inft⟶infin
1t
E 1113946t
0x1(θ)dθ
gexlowast12
minus lim supt⟶infin
1t
E 1113946t
0
x1(θ) minus xlowast1( 11138572
2xlowast1dθ
gexlowast12
minusn
2mxlowast1ge
xlowast12
minusμ2n0
2mxlowast1gt 0
(44)
Similarly when μltmin xlowast2mn0
1113968 ulowast
mn0
11139681113966 1113967
lim inft⟶infin
1t
E 1113946t
0x2(θ)dθgt 0
lim inft⟶infin
1t
E 1113946t
0u(θ)dθ gt 0
(45)
5 Extinction
Define
Δ a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875
Δ1 e a11a22 + a12a21( 1113857 minus a11cf
Δ2 a12Δ e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859
minus r1 minus12σ211113874 1113875e a11a22 + a12a21( 1113857
2
(46)
For the extinction of system (5) we have the followingconclusions
Theorem 4 For any given initial condition (6) the solution(x1(t) x2(t) u(t)) of system (5) has the following properties
(i) when r1 minus (12)σ21 lt 0 and r2 minus (12)σ22 lt 0 thepopulation is extinct
(ii) when r1 minus (12)σ21 gt 0 and Δlt 0 population x1 ispersistent and x2 and u are extinct
(iii) when r1 minus (12)σ21 gt 0Δgt 0 Δ1 gt 0 and Δ2 gt 0population x1 is extinct and x2 and u are persistent
Before proving eorem 4 consider the followingauxiliary system [37]
dz1(t) z1(t) r1 minus a11z1(t)1113858 1113859dt + σ1z1(t)dB1(t)
dz2(t) z2(t) r2 + a21z1 t minus τ2( 1113857 minus a22z2(t)1113858 1113859dt
+ σ2z2(t)dB2(t)
⎧⎪⎪⎨
⎪⎪⎩
(47)
and it satisfies the initial condition ϕ(θ) (ϕ1(θ)
ϕ2(θ)) isin C([minus τ 0] R2+)
Lemma 1 If r1 minus (12)σ21 gt 0 the solution z(t) of system(47) has the following properties
(i) limt⟶+infintminus 1 1113938t
0 z1(s)ds (r1 minus ((12)σ21))a11
(ii) if Δlt 0 limt⟶+infinz2(t) 0
(iii) if Δgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) as
Proof By Itorsquos formula we obtain
ln z1(t) minus ln z1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0z1(s)ds + σ1B1(t) (48)
ln z2(t) minus ln z2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0z1 s minus τ2( 1113857ds minus a22 1113946
t
0z2(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0z1(s)ds minus a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 minus a22 1113946
t
0z2(s)ds + σ2B2(t)
(49)
Dividing both sides of (48) and (49) by t we have
tminus 1ln
z1(t)
z1(0) r1 minus
12σ211113874 1113875 minus a11t
minus 11113946
t
0z1(s)ds + t
minus 1σ1B1(t) (50)
tminus 1ln
z2(t)
z2(0)+ t
minus 1a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891 r2 minus
12σ221113874 1113875 + a21t
minus 11113946
t
0z1(s)ds minus a22t
minus 11113946
t
0z2(s)ds + t
minus 1σ2B2(t) (51)
Complexity 9
By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

By using Lemma 2 of [37] from equation (48) it followsthat
lim supt⟶+infin
tminus 1
1113946t
0z1(s)ds le
r1 minus (12)σ21a11
lim inft⟶+infin
tminus 1
1113946t
0z1(s)ds ge
r1 minus (12)σ21a11
(52)
and therefore
limt⟶+infin
tminus 1
1113946t
0z1(s)ds
r1 minus (12)σ21a11
(53)
Substitute (53) into (50) and from limt⟶+infintminus 1Bi(t) 0(i 1 2) we get
limt⟶+infin
tminus 1ln z1(t) 0 (54)
On the other hand computing (50)times a21 + (51)times a11 wehave
a21tminus 1ln
z1(t)
z1(0)+ a11t
minus 1lnz2(t)
z2(0)+ t
minus 1a11a21 1113946
t
tminus τ2z1(s)ds minus 1113946
0
minus τ2z1(s)ds1113890 1113891
a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22t
minus 11113946
t
0z2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(55)
By Lemma 2 in literature [37] when Δlt 0lim
t⟶+infinz2(t) 0 (56)
If Δgt 0
limt⟶+infin
tminus 1
1113946t
0z2(s)ds
Δa11a22
as (57)
Proof of lemma is completed
is is where we prove eorem 4
Proof By using Itorsquos formula for system (5) we have
lnx1(t) minus lnx1(0) r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2 s minus τ1( 1113857ds + σ1B1(t)
r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds minus a12 1113946
t
0x2(s)ds + a12 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + σ1B1(t)
(58)
lnx2(t) minus lnx2(0) r2 minus12σ221113874 1113875t + a21 1113946
t
0x1 s minus τ2( 1113857ds minus a22 1113946
t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
r2 minus12σ221113874 1113875t + a21 1113946
t
0x1(s)ds minus a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
minus a22 1113946t
0x2(s)ds minus c 1113946
t
0u(s)ds + σ2B2(t)
(59)
We first prove (i) from equation (58) we can get
lnx1(t) minus lnx1(0)le r1 minus12σ211113874 1113875t minus a11 1113946
t
0x1(s)ds + σ1B1(t)
(60)
By the condition r1 minus (12)σ21 lt 0 and Lemma 2 in lit-erature [37]
limt⟶+infin
x1(t) 0 as (61)
From (57) (61) and the condition r2 minus (12)σ22 lt 0 wehave
limt⟶+infin
x2(t) 0 as (62)
Further from the third equation of model (5) we can get
limt⟶+infin
u(t) 0 as (63)
Secondly it proves (ii) comparing model (5) withauxiliary system (37) one can get x1(t)le z1(t) andx2(t)le z2(t) By Lemma 1 when r1 minus (12)σ21 gt 0 andΔlt 0limt⟶+infinz2(t) 0 as therefore limt⟶+infinx2(t) 0 asSo we have limt⟶+infinu(t) 0 en the limit system ofmodel (5) is as follows
dx1(t) x1(t) r1 minus a11x1(t)1113858 1113859dt + σ1x1(t)dB1(t) (64)
From Lemma 1 we can conclude that
10 Complexity
0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

0 20 40 60 80 100t
0
2
4
6
8
10x 1
(t) x
2(t)
u(t)
x1x2u
(a)
16
2
5 7
3u(t)
6
4
4 5
5
43 32 2
x1(t)x2(t)
(b)
Figure 1 (a) Time series diagram of (x1(t) x2(t) u(t)) and (b) its phase diagram
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 2 Time series diagram of (x1(t) x2(t) u(t))
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
Figure 3 Time series diagram of (x1(t) x2(t) u(t))
Complexity 11
limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

limt⟶+infin
tminus 1
1113946t
0x1(s)ds
r1 minus (12)σ21a11
as (65)
erefore population x1 is persistent and x2 and u areextinct
Finally we prove (iii) by Lemma 1 when r1 minus (12)
σ21 gt 0 andΔgt 0 limt⟶+infintminus 1 1113938t
0 z2(s)ds (Δa11a22) asAnd by (54)
lim supt⟶+infin
tminus 1 ln x1(t)le lim
t⟶+infintminus 1 ln z1(t) 0 (66)
Computing (58)times a21 + (59)times a11
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891
tminus 1
a12a21 1113946t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891 + a21 r1 minus
12σ211113874 1113875
+ a11 r2 minus12σ221113874 1113875 minus a11ct
minus 11113946
t
0u(s)ds minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(67)
erefore
a21tminus 1 ln
x1(t)
x1(0)+ a11t
minus 1 lnx2(t)
x2(0)+ t
minus 1a11a21 1113946
t
tminus τ2x1(s)ds minus 1113946
0
minus τ2x1(s)ds1113890 1113891 minus t
minus 1a12a21 1113946
t
tminus τ1x2(s)ds minus 1113946
0
minus τ1x2(s)ds1113890 1113891
le a21 r1 minus12σ211113874 1113875 + a11 r2 minus
12σ221113874 1113875 minus a11a22 + a12a21( 1113857t
minus 11113946
t
0x2(s)ds + t
minus 1a21σ1B1(t) + a11σ2B2(t)1113858 1113859
(68)
Let t⟶ +infin and the condition Δ a21(r1 minus (12)σ21) + a11(r2 minus (12)σ22)gt 0 is satisfied so
lim supt⟶+infin
tminus 1
1113946t
0x2(s)dsle
Δa11a22 + a12a21
as (69)
Considering the third equation of model (5)u(t) minus u(0)
t minus et
minus 11113946
t
0u(s)ds + ft
minus 11113946
t
0x2(s)ds (70)
hence
0 10 15 20t
0
2
4
6
8
10
5
x 1(t)
x2(t)
u(t)
x1x2u
(a)
2 25 3 35 4 45 5 55 6x2(t)
1
15
2
25
3
35
4
45
5
u(t)
(b)
Figure 4 (a) Time series diagram of (x1(t) x2(t) u(t)) (b) Phase diagram of (x2(t)) u(t)
12 Complexity
lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

lim supt⟶+infin
tminus 1
1113946t
0u(s)dsle
fΔe a11a22 + a12a21( 1113857
as (71)
Substitute (71) into equation (67) and by the conditionΔ1 e(a11a22 + a12a21) minus a11cfgt 0 we have
lim inft⟶+infin
tminus 1
1113946t
0x2(s)dsge
Δ minus a11cfΔe a11a22 + a12a21( 1113857( 1113857
a11a22 + a12a21
e a11a22 + a12a21( 1113857 minus a11cf( 1113857Δ
e a11a22 + a12a21( 11138572 gt 0 as
(72)
It is concluded that predator x2(t) is persistentWhen t⟶ +infin and substituting (72) into equation
(70) one can see that
lim inft⟶+infin
tminus 1
1113946t
0u(s)dsge
f e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe2 a11a22 + a12a21( 1113857
2 gt 0 as
(73)
So u(t) is persistente condition Δ2 gt 0 means that
r1 minus12σ21 lt
a12 e a11a22 + a12a21( 1113857 minus a11cf1113858 1113859Δe a11a22 + a12a21( 1113857
2 (74)
Substituting (72) into equation (58) and by the conditionΔ2 gt 0 we have
limt⟶+infin
x1(t) 0 as (75)
So x1(t) is extinction e proof of eorem 4 iscomplete
6 Conclusions and Numerical Simulations
is paper proposes a stochastic LotkandashVolterra predator-prey model with discrete delays and feedback control Wefirstly study the existence and uniqueness of global positivesolution By constructing appropriate Lyapunov functionsand applying Itorsquos formula we discuss the asymptotic be-havior of stochastic system at the positive equilibrium pointof the corresponding deterministic model Finally this papergives the conditions for the persistence and extinction ofstochastic system eorem 3 shows that the system ispersistent if the intensity σi(i 1 2) of random disturbanceand the coefficient c of feedback control variable satisfy thecondition (A2) eorem 4 indicates that
(1) If the coefficient c of the feedback control cu(t)x2(t)
remains unchanged and the intensity σi(i 1 2) ofrandom disturbance increases the population can-not resist the disturbance of the external environ-ment and extinct
(2) If the intensity of random disturbance σi(i 1 2)
remains unchanged and the coefficient c of feedbackcontrol cu(t)x2(t) is small Δ1 gt 0 and Δ2 gt 0 aresatisfied which will cause the continuous increase of
predator number for a period of time thus leading tothe extinction of the prey population
erefore utilizing the feedback control measures tolimit the predator quantity within a certain range is bene-ficial for the sustained existence of the population
In order to verify the correctness of the theoreticalanalysis we carry out the following numerical simulationsChoose the parameters in system (5) as follows
r1 15
r2 12
e 05
f 02
a11 02
a21 02
a22 04
τ1 1
τ2 1
(76)
Let Δt 001 and the initial value x1(0)
7 x2(0) 6 and u(0) 5
(i) Set c 04 a12 025 σ1 005 and σ2 005 andthe positive equilibrium point of the correspondingdeterministic model is (xlowast1 xlowast2 ulowast) (103 103 43) It is proved that conditions (A1) and (A2)
are satisfied and eorem 2 and eorem 3 arevalid System (5) oscillates slightly near the point(103 103 43) and persistently (see Figure 1)
(ii) Set c 01 a12 025 σ1 18 and σ2 16 onecan get r1minus (12)σ21 minus 012lt 0 and r2 minus (12)σ22
minus 008lt 0 According to eorem 4 (i) system (5) isextinct (see Figure 2)
(iii) Set c 01 a12 025 σ1 005 and σ2 25 wehave r1 minus (12)σ21 14988gt 0 and Δ a21(r1minus
(12)σ21) + a11(r2 minus (12)σ22) minus 00852lt 0According to eorem 4 (ii) population x1 ispersistent and x2 and u are extinct (see Figure 3)
(iv) Set c 01 a12 055 σ1 005 and σ2 005 weobtain r1 minus (12)σ21 14988gt 0 Δ a21(r1 minus (12)
σ21) + a11(r2 minus (12)σ22) 05395gt 0 Δ1 e(a11a22+ a12a21) minus a11cf 0091gt 0 and Δ2 a12Δ[e(a11a22 + a12a21) minus a11cf] minus (r1 minus (12)σ21)e(a11a22 + a12a21)
2 0027gt 0 According to eorem 4 (iii)population x1 is extinct and x2 and u are persistent(see Figure 4)
Data Availability
All data sets used in this study are hypothetical
Conflicts of Interest
e authors declare that they have no conflicts of interest
Complexity 13
Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Acknowledgments
is work was supported by the National Natural ScienceFoundation of China (11371230) and SDUST Research Fund(2014TDJH102)
References
[1] Y Muroya ldquoPermanence and global stability in a lotka-vol-terra predator-prey system with delaysrdquo Applied MathematicsLetters vol 16 no 8 pp 1245ndash1250 2003
[2] X Meng F Li and S Gao ldquoGlobal analysis and numericalsimulations of a novel stochastic eco-epidemiological modelwith time delayrdquo Applied Mathematics and Computationvol 339 pp 701ndash726 2018
[3] T Ma X Meng and Z Chang ldquoDynamics and optimalharvesting control for a stochastic one-predator-two-preytime delay system with jumpsrdquo Complexity vol 2019 ArticleID 5342031 p 19 2019
[4] Z Jiang X Bi T Zhang and B S A Pradeep ldquoGlobal hopfbifurcation of a delayed phytoplankton-zooplankton systemconsidering toxin producing effect and delay dependent co-efficientrdquo Mathematical Biosciences and Engineering vol 16no 5 pp 3807ndash3829 2019
[5] F Li S Zhang and X Meng ldquoDynamics analysis and nu-merical simulations of a delayed stochastic epidemic modelsubject to a general response functionrdquo Computational andApplied Mathematics vol 38 no 2 p 95 2019
[6] Y Saito T Hara and W Ma ldquoNecessary and sufficientconditions for permanence and global stability of a lotka-volterra system with two delaysrdquo Journal of MathematicalAnalysis and Applications vol 236 no 2 pp 534ndash556 1999
[7] H Hu Z Teng and S Gao ldquoExtinction in nonautonomouslotka-volterra competitive system with pure-delays andfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 10 no 4 pp 2508ndash2520 2009
[8] H Huo and W Li ldquoPositive periodic solutions of a class ofdelay differential system with feedback controlrdquo AppliedMathematics and Computation vol 148 no 1 pp 35ndash462004
[9] W Wang W Ma and Z Feng ldquoDynamics of reactionndashdiffusion equations for modeling CD4+ T cells decline withgeneral infection mechanism and distinct dispersal ratesrdquoNonlinear Analysis Real World Applications vol 51 ArticleID 102976 2020
[10] W Lv F Wang and Y Li ldquoAdaptive finite-time trackingcontrol for nonlinear systems with unmodeled dynamicsusing neural networksrdquo Advances in Difference Equationsvol 2018 Article ID 159 2018
[11] J Wang H Cheng H Liu and Y Wang ldquoPeriodic solutionand control optimization of a prey-predator model with twotypes of harvestingrdquo Advances in Difference Equationsvol 2018 Article ID 41 2018
[12] W Lv and F Wang ldquoAdaptive tracking control for a class ofuncertain nonlinear systems with infinite number of actuatorfailures using neural networksrdquo Advances in DifferenceEquations vol 2017 no 1 Article ID 374 2017
[13] T Zhang N Gao T Wang H Liu and Z Jiang ldquoGlobaldynamics of a model for treating microorganisms in sewageby periodically adding microbial flocculantsrdquo MathematicalBiosciences and Engineering vol 17 no 1 pp 179ndash201 2020
[14] T Zhang T Xu J Wang Y Song and Z Jiang ldquoGeometricalanalysis of a pest management model in food-limited envi-ronments with nonlinear impulsive state feedback controlrdquo
Journal of Applied Analysis and Computation vol 9 no 6pp 1ndash17 2019
[15] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 4-5 pp 665ndash6762003
[16] Z Li M Han and F Chen ldquoInfluence of on an autonomousLotkandashVolterra competitive system with infinite delaysfeedback controlsrdquo Nonlinear Analysis Real World Appli-cations vol 14 no 1 pp 402ndash413 2013
[17] C Shi X Chen and Y Wang ldquoFeedback control effect on thelotka-volterra prey-predator system with discrete delaysrdquoAdvances in Difference Equations vol 2017 no 1 p 373 2017
[18] F Bian W Zhao Y Song and R Yue ldquoDynamical analysis ofa class of prey-predator model with Beddington-DeAngelisfunctional response stochastic perturbation and impulsivetoxicant inputrdquo Complexity vol 2071 Article ID 3742197 p 182017
[19] M Chi and W Zhao ldquoDynamical analysis of multi-nutrientand single microorganism chemostat model in a pollutedenvironmentrdquo Advances in Difference Equations vol 2018no 1 Article ID 120 2018
[20] A Miao T Zhang J Zhang and C Wang ldquoDynamics ofa stochastic sir model with both horizontal and verticaltransmissionrdquo Journal of Applied Analysis and Computationvol 8 no 4 pp 1108ndash1121 2018
[21] T Feng Z Qiu X Meng and L Rong ldquoAnalysis of a sto-chastic hiv-1 infection model with degenerate diffusionrdquoAppliedMathematics and Computation vol 348 pp 437ndash4552018
[22] X Li and X Mao ldquoPopulation dynamical behavior of non-autonomous lotka-volterra competitive system with randomperturbationrdquo Discrete and Continuous Dynamical Systems-Series A vol 24 no 2 pp 523ndash593 2009
[23] Y Li and X Meng ldquoDynamics of an impulsive stochasticnonautonomous chemostat model with two different growthrates in a polluted environmentrdquoDiscrete Dynamics in Natureand Society vol 2019 Article ID 5498569 p 15 2019
[24] W Zhang X Meng and Y Dong ldquoPeriodic solution andergodic stationary distribution of stochastic siri epidemicsystems with nonlinear perturbationsrdquo Journal of SystemsScience and Complexity vol 32 no 4 pp 1104ndash1124 2019
[25] G Liu Z Chang and X Meng ldquoAsymptotic analysis ofimpulsive dispersal predator-prey systems with markovswitching on finitendashstate spacerdquo Journal of Function Spacesvol 2019 Article ID 8057153 p 18 2019
[26] H Qi X Meng and T Feng ldquoDynamics analysis of a sto-chastic nonndashautonomous onendashpredatorndashtwondashprey systemwith BeddingtonndashDeAngelis functional response and im-pulsive perturbationsrdquo Advances in Difference Equationsvol 2019 no 1 Article ID 235 2019
[27] M Chi andW Zhao ldquoDynamical analysis of two-microorganismand single nutrient stochastic chemostat model with monod-haldane response functionrdquo Complexity vol 2019 Article ID8719067 p 13 2019
[28] F F Zhu X Z Meng and T H Zhang ldquoOptimal harvestingof a competitive n-species stochastic model with delayeddiffusionsrdquoMathematical Biosciences and Engineering vol 16no 3 pp 1554ndash1574 2019
[29] X Yu S Yuan and T Zhang ldquoPersistence and ergodicity ofa stochastic single species model with allee effect under regimeswitchingrdquo Communications in Nonlinear Science and Nu-merical Simulation vol 59 pp 359ndash374 2018
14 Complexity
[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

[30] W Zhao J Li T Zhang X Meng and T Zhang ldquoPersistenceand ergodicity of plant disease model with markov conversionand impulsive toxicant inputrdquo Communications in NonlinearScience and Numerical Simulation vol 48 pp 70ndash84 2017
[31] W Zhao J Liu M Chi and F Bian ldquoDynamics analysis ofstochastic epidemic models with standard incidencerdquo Ad-vances in Difference Equations vol 2019 no 1 Article ID 222019
[32] T Feng Z Qiu and X Meng ldquoDynamics of a stochastichepatitis c virus system with host immunityrdquo Discrete ampContinuous Dynamical SystemsndashB vol 24 no 12 pp 6367ndash6385 2019
[33] T Feng Z Qiu and X Meng ldquoAnalysis of a stochastic re-covery-relapse epidemic model with periodic parameters andmedia coveragerdquo Journal of Applied Analysis and Computa-tion vol 9 no 3 pp 1007ndash1021 2019
[34] N Gao Y Song X Wang and J Liu ldquoDynamics of a sto-chastic sis epidemic model with nonlinear incidence ratesrdquoAdvances in Difference Equations vol 2019 no 1 Article ID41 2019
[35] Y Song A Miao T Zhang X Wang and J Liu ldquoExtinctionand persistence of a stochastic sirs epidemic model withsaturated incidence rate and transfer from infectious tosusceptiblerdquo Advances in Difference Equations vol 2018no 1 Article ID 293 2018
[36] X Mao Stochastic Differential Equations and ApplicationsHorwood Publishing Chichester UK 2007
[37] M Liu H Qiu and K Wang ldquoA remark on a stochasticpredator-prey system with time delaysrdquo Applied MathematicsLetters vol 26 no 3 pp 318ndash323 2013
Complexity 15
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom









![Competitive Lotka-Volterra Population Dynamics with · PDF filearXiv:1102.2163v1 [math.PR] 10 Feb 2011 Competitive Lotka-Volterra Population Dynamics with Jumps Jianhai Bao1,3, Xuerong](https://static.fdocuments.us/doc/165x107/5aa5c9347f8b9a185d8dc6a8/competitive-lotka-volterra-population-dynamics-with-11022163v1-mathpr-10.jpg)