Propuesta para Trabajo de Grado -...
135
CIS1610IN03 AKLAS: DISPOSITIVO DE ORIENTACIÓN PARA INVIDENTES BASADO EN EL PRINCIPIO DE ECOLOCALIZACIÓN OMAR ANDRES GONZALEZ MAYORGA ANDRÉS RICARDO SCARPETTA RUGELES PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA
Transcript of Propuesta para Trabajo de Grado -...

CIS1610IN03AKLAS: DISPOSITIVO DE ORIENTACIÓN PARA INVIDENTES BASADO EN EL
PRINCIPIO DE ECOLOCALIZACIÓN
OMAR ANDRES GONZALEZ MAYORGAANDRÉS RICARDO SCARPETTA RUGELES
PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMASBOGOTÁ, D.C.
2016

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
CIS1610IN03AKLAS: DISPOSITIVO DE ORIENTACIÓN PARA INVIDENTES BASADO EN
EL PRINCIPIO DE ECOLOCALIZACIÓN
Autores:
Omar Andrés González MayorgaAndrés Ricardo Scarpetta Rugeles
MEMORIA DEL TRABAJO DE GRADO REALIZADO PARA CUMPLIR UNO DE LOS REQUISITOS PARA OPTAR AL TITULO DE INGENIERO DE
SISTEMAS
Director
Luis Guillermo Torres Ribero
Jurados del Trabajo de Grado
Ingeniero Camilo Rey Torres
Ingeniero Enrique Ruiz García
Página web del Trabajo de Grado
http://pegasus.javeriana.edu.co/~CIS1610IN03
PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMASBOGOTÁ, D.C.
JUNIO, 2016
Página iPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008
Ingeniería de Sistemas SIDRe - CIS1610IN03
PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMAS
Rector Magnífico
Jorge Humberto Peláez Piedrahita, S.J.
Decano Académico Facultad de Ingeniería
Ingeniero Jorge Luis Sánchez Téllez
Director de la Carrera de Ingeniería de Sistemas
Ingeniera Mariela Josefina Curiel Huérfano
Director Departamento de Ingeniería de Sistemas
Ingeniero Efraín Ortiz Pabón
Página ii

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Artículo 23 de la Resolución No. 1 de Junio de 1946
“La Universidad no se hace responsable de los conceptos emitidos por sus alumnos en sus
proyectos de grado. Sólo velará porque no se publique nada contrario al dogma y la moral
católica y porque no contengan ataques o polémicas puramente personales. Antes bien, que
se vean en ellos el anhelo de buscar la verdad y la Justicia”
Página iiiPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
AGRADECIMIENTOS
Damos gracias a nuestras familias, las cuales estuvieron apoyándonos en todo aspecto a lo
largo este duro proceso y acompañándonos en los momentos difíciles del mismo.
Igualmente damos gracias a nuestros amigos, compañeros y profesores que creyeron en
este extraordinario proyecto, por sus palabras de aliento y reconocimientos hacia nosotros y
el trabajo realizado. Por último, agradecemos a Valentina Espinosa por siempre apoyarnos y
motivarnos a salir adelante siempre.
Un agradecimiento especial para los profesores Luis Guillermo Torres Ribero, director,
amigo y guía valioso para la orientación de este gran trabajo, y Leonardo Flórez Valencia,
por darnos la mano y asesorarnos en la creación del algoritmo que le da vida a este
proyecto. Sus ayudas fueron indispensables para el desarrollo del Trabajo de Grado aquí
consignado.
Página iv

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
CONTENIDO
CONTENIDO...............................................................................................................V
LISTA DE FIGURAS.....................................................................................................VII
LISTA DE TABLAS.........................................................................................................X
LISTA DE ECUACIONES................................................................................................XI
I - INTRODUCCIÓN..................................................................................................1
II - DESCRIPCION GENERAL................................................................................2
1. OPORTUNIDAD, PROBLEMÁTICA, ANTECEDENTES.............................................21.1. Formulación del problema que se resolvió..............................................................21.2. Justificación del problema........................................................................................31.3. Impacto Esperado.....................................................................................................4
2. DESCRIPCIÓN DEL PROYECTO............................................................................52.1. Objetivo general.......................................................................................................52.2. Objetivos específicos................................................................................................5
3. METODOLOGÍA...................................................................................................63.1. Fase 1: Documentación del Proceso y Diseño del Dispositivo....................................63.2. Fase 2: Obtención de Información y Diseño del Algoritmo de Procesamiento de Señales.................................................................................................................................83.3. Fase 3: Diseño de Ambientes Controlados y Validación Estadística..........................93.4. Calendario de Trabajo...............................................................................................10
III - CONTRIBUCIONES.........................................................................................10
1. CONCEPTOS FUNDAMENTALES.........................................................................13Ecolocalización / Ecolocación..........................................................................................13Acústica de interiores........................................................................................................13Arduino..............................................................................................................................17Sensor Ultrasónico............................................................................................................18Bluetooth............................................................................................................................18
Página vPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
2. TRABAJOS RELACIONADOS..............................................................................19Ecolocalización ciega usando sensores Ultrasónicos.......................................................19Tacit Project: Un sonar para invidentes...........................................................................20UltraCane..........................................................................................................................21Bastón Ultrasónico............................................................................................................22Uso de teléfonos inteligentes para ayudar a personas con discapacidad visual a localizarse dentro de un espacio cerrado..........................................................................23Perro Lazarillo..................................................................................................................24
3. JUSTIFICACIÓN..................................................................................................26
4. DESCRIPCIÓN DE LA SOLUCIÓN........................................................................27Diseño y construcción de la solución................................................................................28Restricciones......................................................................................................................45Estándares.........................................................................................................................46
5. VALIDACIÓN.....................................................................................................49
6. VALIDACIÓN Y RESULTADOS...........................................................................55Primera Franja..................................................................................................................56Segunda Franja.................................................................................................................59Consolidado de las Pruebas..............................................................................................63
7. ANÁLISIS DE IMPACTO.....................................................................................69
8. CONCLUSIONES.................................................................................................76
IV- REFERENCIAS Y BIBLIOGRAFÍA...............................................................78
IV - ANEXOS.............................................................................................................83
ANEXO 1. GLOSARIO....................................................................................................83
ANEXO 2. ESPECIFICACIÓN DE REQUERIMIENTOS (SRS) Y CASOS DE USO................84
ANEXO 3. DESCRIPCIÓN MATEMÁTICA DEL ALGORITMO (FILTRO DE KALMAN)........85
ANEXO 4. FORMATO DE ENCUESTA BASADO EN TAM................................................85
Página vi

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Lista de Figuras
Ilustración 1: Diagrama Gantt de Calendarización del proyecto.............................................11
Ilustración 2: Diagrama Gantt de la Calendarización Ejecutada del proyecto.........................12
Ilustración 3: Representación de las reflexiones del sonido [16].............................................15
Ilustración 4: Acústica geométrica y su influencia en la Reflexión del sonido [16]................16
Ilustración 5: Comparación entre absorción, reflexión y difusión [16]...................................17
Ilustración 6: Esquema del prototipo [9]..................................................................................20
Ilustración 7: Tacit Project y su concepto de banda en la muñeca [21]...................................21
Ilustración 8: UltraCane, en su modo para guardar [22]..........................................................22
Ilustración 9: Bastón Ultrasónico con su respectiva pulsera. Tomado de http://www.umb.edu.co/images/noticias/ing-electronica/2.jpg................................................23
Ilustración 10: Esquemático paso a paso de cómo usar esta solución [24]..............................24
Ilustración 11: Perros Lazarillos y sus dueños.........................................................................25
Ilustración 12: Esquemático base (versión 1.0).......................................................................30
Ilustración 13: Prototipo inicial sin uso de batería (las resistencias fueron agregadas posteriormente y por tanto, no hacen parte de esta versión)....................................................31
Ilustración 14: Mejora del prototipo inicial (versión 1.1)........................................................32
Ilustración 15: Posible circuito impreso de esta versión..........................................................33
Ilustración 16: Prototipo modificado siguiendo el esquemático..............................................34
Ilustración 17: Nuevo esquemático (versión 2.0).....................................................................36
Ilustración 18: Circuito impreso de la versión 2.0...................................................................36
Página viiPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 19: Prototipo actualizado según el esquemático....................................................37
Ilustración 20: Aplicación en funcionamiento y Caja alojando el sensor................................44
Ilustración 21: Áreas del Technology Acceptance Model a trabajar [46]................................50
Ilustración 22: Caja hecha en madera (Primer diseño)............................................................51
Ilustración 23: Caja alojando el módulo de Arduino...............................................................51
Ilustración 24: Caja de cartón (Segundo diseño).....................................................................52
Ilustración 25: Primer corredor................................................................................................52
Ilustración 26: Segundo corredor.............................................................................................53
Ilustración 27: Tercer corredor (derecha).................................................................................53
Ilustración 28: Tercer corredor (izquierda)..............................................................................54
Ilustración 29: Comportamiento del Filtro en el sujeto vidente 1............................................57
Ilustración 30: Comportamiento del Filtro en el sujeto vidente 2............................................58
Ilustración 31: Comportamiento del Filtro en el sujeto vidente 5............................................59
Ilustración 32: Comportamiento del Filtro en el sujeto vidente 6............................................60
Ilustración 33: Comportamiento del Filtro en el sujeto vidente 7............................................61
Ilustración 34: Comportamiento del Filtro en el sujeto vidente 8............................................61
Ilustración 35: Comportamiento del Filtro en el sujeto vidente 9............................................62
Ilustración 36: Comportamiento del Filtro en el sujeto vidente 10..........................................63
Ilustración 37: Respuestas pregunta 1......................................................................................63
Ilustración 38: Respuestas pregunta 2......................................................................................64
Ilustración 39: Respuestas pregunta 3......................................................................................64
Ilustración 40: Respuestas pregunta 4......................................................................................65
Página viii

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 41: Respuestas pregunta 5......................................................................................66
Ilustración 42: Respuestas pregunta 6......................................................................................66
Ilustración 43: Respuestas pregunta 7......................................................................................67
Ilustración 44: Respuestas pregunta 8......................................................................................67
Ilustración 45: Consolidado de datos del sensor......................................................................68
Ilustración 46: Consolidado de datos filtrados.........................................................................68
Ilustración 31: Comportamiento del Filtro en el sujeto invidente 1.........................................69
Ilustración 32: Comportamiento del Filtro en el sujeto invidente 2.........................................70
Ilustración 33: Comportamiento del Filtro en el sujeto invidente 3.........................................71
Ilustración 34: Comportamiento del Filtro en el sujeto invidente 4.........................................71
Ilustración 35: Comportamiento del Filtro en el sujeto invidente 5.........................................72
Ilustración 36: Comportamiento del Filtro en el sujeto invidente 6.........................................72
Página ixPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Lista de Tablas
Tabla 1: Materiales del módulo (versión 1.0)..........................................................................29
Tabla 2: Materiales del módulo (versión 2.0)..........................................................................35
Página x

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Lista de Ecuaciones
Ecuación 1: Definición de velocidad y sus unidades...............................................................38
Ecuación 2: Fórmula para generar los valores de la escala......................................................38
Ecuación 3: Valores máximo y mínimo de la escala propuesta...............................................39
Ecuación 4: Modelo de velocidad de Usuario y Objeto...........................................................39
Ecuación 5: Fórmulas de velocidad para Objeto y Usuario (calibración)................................40
Ecuación 6: Fórmula de escala adaptada al nuevo modelo......................................................40
Ecuación 7: Variables del estado.............................................................................................41
Ecuación 8: Ecuaciones de la fase de Predicción.....................................................................41
Ecuación 9: Ganancia de Kalman............................................................................................42
Ecuación 10: Ecuaciones de la fase de Actualización..............................................................42
Página xiPreparado por el Grupo Investigación Istar- Versión 1.0 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
ABSTRACT
AKLAS is a research project seeking to improve the quality of life of people with visual
impairment. This project focuses on the development of a guidance system by using an
ultrasonic sensor to collect data at 40 KHz, and implementing a Kalman filter for noise
reduction and to get the best estimate of the next state, creating a simulation of the
echolocation principle, found in bats, dolphins and whales.
RESUMEN
AKLAS es un proyecto de investigación que busca mejorar la calidad de vida de las personas
con discapacidad visual. Este se centra en el desarrollo de un sistema de orientación
mediante el uso de un sensor ultrasónico que recoge datos a 40 KHz, y la implementación de
un filtro de Kalman para la reducción de ruido y para obtener la mejor estimación del
siguiente estado, creando una simulación del principio de ecolocalización, encontrado en
murciélagos, delfines y ballenas.
Página xii

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
I - INTRODUCCIÓN
Las tecnologías de la información han tomado un puesto importante en nuestra sociedad.
Estas le facilitan diferentes tareas al ser humano y le permiten tener un mayor control de su
entorno. Los dispositivos electrónicos han evolucionado para que esto suceda. De ser
grandes máquinas para realizar cálculos en cuartos especiales, han pasado a ser pequeños
aparatos que caben en nuestro bolsillo y poseen miles de funciones. Estas tecnologías se
pueden considerar como una gran ayuda a las actividades que realiza el ser humano
cotidianamente, le permiten realizar tareas con una mayor calidad y en menor tiempo.
Además de ser útiles para las tareas diarias, se han implementado tecnologías que prestan
ayuda a personas con necesidades especiales. Estos dispositivos les permiten suplir la
ausencia de habilidades presentes en personas del común, tal como la visión, la escucha o
caminar. Algunas de estas tecnologías son comerciales, como los implantes cocleares,
mientras que otras se encuentran en una etapa de investigación. Desafortunadamente,
varias creaciones tecnológicas para personas con discapacidad visual solo están orientadas a
la accesibilidad y el uso de dispositivos de comunicación. En muy pocas ocasiones se han
planteado soluciones que ayuden a mejorar la movilidad de esta población.
En el presente documento se expone el proceso de investigación de una nueva tecnología
con el propósito de ayudar a personas con discapacidad visual. Este sistema se enfoca en la
orientación espacial de la persona en sitios cerrados, proporcionando información sobre su
entorno para darle mayor libertad en sus movimientos. Con esto se pretende dar una
solución a la necesidad más importante de la población con discapacidad visual.
Página 1
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
II - DESCRIPCION GENERAL
1. Oportunidad, Problemática, Antecedentes
Esta sección introduce el problema tratado por el presente Trabajo de Grado, cómo y por
qué se formuló, y su impacto esperado en la sociedad una vez terminada la investigación
correspondiente.
1.1. Formulación del problema que se resolvió
Uno de los problemas más comunes a los que se enfrentan las personas con discapacidad
visual es el cálculo de distancias en un lugar dado, el cual es necesario para evitar
accidentes. Es por esta razón que se acude al uso de elementos como el bastón; sin
embargo, el 98% de la población que presenta discapacidad visual no se encuentra cómoda
con el uso de un bastón que les permita ubicarse dentro de un entorno en su diario vivir [1];
además, presentan una fuerte incomodidad frente al hecho de llevar un dispositivo que
restringe el uso de sus extremidades para otras funciones [2]. Respecto a lo anteriormente
mencionado, se forman diversos estereotipos que encapsulan a la persona dentro de
diversas burlas y comentarios que son poco agradables [1].
Aparte de pasar por la incomodidad que causan los argumentos anteriores, las personas con
discapacidad visual tienen problemas a la hora de cruzar una calle, esto se debe a que no
tienen algún tipo de estímulo que les indique si la calle está despejada o incluso cuándo
cambia el semáforo. Para este tipo de situaciones el uso del bastón no es óptimo ya que no
brinda información para dar aviso a la persona si puede o no cruzar la calle sin el peligro de
tener algún accidente [3]. Por otra parte, múltiples opciones se han usado para ayudar a la
gente con discapacidad visual, una de estas opciones es el uso de perros, los cuales sirven de
guía en todo tipo de entorno; no obstante, al requerir un entrenamiento especial, el uso de
estos animales no termina siendo una opción muy rentable dado su alto costo y tiempo
requerido de entrenamiento [4].
Página 2

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Analizando la industria de ayudas para invidentes, se encontraron varios dispositivos que
pueden solucionar alguno de estos problemas por separado pero no todos en conjunto;
además, estos no son asequibles para el usuario, en especial porque la producción de cada
uno de los elementos cuesta mucho dinero contando su investigación, materiales y
posterior desarrollo [5]. En algunos casos se pueden ver dispositivos que son asequibles
para el usuario pero representan un gran esfuerzo o una incomodidad pues su tamaño
interfiere con las actividades cotidianas de la persona, como el uso del transporte público, y
demandan un esfuerzo físico por parte del usuario. Algunos ejemplos de lo anterior se
describen en la sección “Trabajos Relacionados” con mayor detalle.
En conclusión, una persona con discapacidad visual está atada a una dificultad en la
autonomía de sus acciones, es decir, sus movimientos están limitados a lo que pueden
percibir sus otros sentidos, lo cual supone un problema porque lo que demandan las
actividades cotidianas, como cruzar una calle, subir una escalera, y en general todas lo
relacionado con el cálculo de distancias requiere del sentido de la vista. Es por esta razón
que se hace necesaria la creación de un dispositivo que no solo mida distancias sino que
logre informar al usuario por medio de otros sentidos (como la audición o el tacto) la
presencia de objetos que interfieran con su recorrido; además, se busca que el dispositivo
sea cómodo para el usuario.
1.2. Justificación del problema
Un gran número de personas con discapacidad visual no se sienten cómodas con el uso de
los métodos tradicionales para localizarse espacialmente como lo es el bastón. El uso de
tecnologías de información proveyó la posibilidad de desarrollar un dispositivo que
cumpliera con las necesidades de este grupo de personas.
Página 3
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Se estima que en el mundo hay 285 millones de personas con impedimentos visuales, de las
cuales 39 millones son ciegas y 246 millones tienen visión baja [6]. Según el censo realizado
en el año 2005, en Colombia había 1’143.992 personas con impedimentos visuales,
aproximadamente el 2.8% de la población colombiana registrada ese año, siendo esta la
mayor cifra en cuanto a personas discapacitadas del país [7].
Algunas soluciones a esta discapacidad se han planteado utilizando principios de localización
espacial encontrados en la naturaleza. Un ejemplo de esto es la Ecolocalización, que es un
sistema sensorial encontrado en murciélagos y ballenas dentadas. En este sistema,
usualmente, se emiten frecuencias más allá del rango del oído humano (ultrasónico) y sus
ecos o reverberaciones son interpretados para determinar la dirección, la distancia y la
forma de los objetos [8].
A pesar de que existen algunos prototipos de dispositivos que utilizan este principio [9], son
dispositivos incomodos para estas personas en cuanto tamaño, lo que implica poca
independencia en sus movimientos. La ecolicalización también se define en algunos
humanos ciegos que desarrollan esta técnica mediante un arduo entrenamiento. A
diferencia del principio encontrado en los murciélagos, se emiten sonidos con la lengua
similares al clic de un mouse, los cuales se encuentran en el rango de frecuencias audibles
del ser humano [10].
De todos los aspectos anteriores, se dedujo que mediante las tecnologías de información se
podía crear un dispositivo cómodo y portable para personas invidentes, el cual está
orientado a la utilización del principio de la ecolicalización, para proveerles independencia
de un bastón o de ayudas caninas y humanas, y proporcionar autonomía total sobre sus
acciones físicas.
1.3. Impacto Esperado
Página 4

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Se espera que este proyecto tenga un alto impacto en los aspectos académico, social y
comercial. Al ser un trabajo de investigación, abre posibilidades para mejoras o nuevas
invenciones basadas en el presente proyecto, donde se pueden integrar métodos de
retroalimentación hápticos y la estimulación de otras áreas del cerebro para dar una mejor
percepción a los invidentes de su entorno. También, se pretende que el producto final
ayude a una gran porción de la población invidente colombiana en su etapa inicial, y
posteriormente, si es posible, a nivel mundial. Finalmente, a raíz de lo mencionado
anteriormente, el producto debe llegar a ser reconocido en el ámbito comercial como
marca.
2. Descripción del Proyecto
En esta sección se realiza una descripción general del proyecto mediante la exposición de
sus objetivos, general y específicos.
2.1. Objetivo general
Construir un sistema de ecolicalización para personas con discapacidad visual, que integre
un prototipo de dispositivo ultrasónico y una aplicación móvil funcional.
2.2. Objetivos específicos
Definir los requerimientos de ecolicalización para orientar a una persona con
discapacidad visual en interiores y espacios cerrados.
Diseñar un dispositivo electrónico con un microcontrolador que permita recoger datos
del entorno mediante un sensor ultrasónico.
Diseñar un algoritmo de ecolicalización que satisfaga los requerimientos planteados.
Validar el algoritmo propuesto de forma cuantitativa mediante pruebas en varios
ambientes controlados.
Página 5
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
3. Metodología
La metodología seleccionada fue EssUP (Essential Unified Process), la cual toma como base
los procesos unificados, metodologías ágiles y el modelo de madurez de procesos (CMMI).
Es una mejora a RUP que consiste en identificar diferentes prácticas de desarrollo iterativo,
se basa en casos de uso, prácticas para el equipo y los procesos [11].
El proceso de EssUp confía en la separación de intereses, lo cual ayuda a identificar y asignar
intereses en un cierto orden de prioridad, es decir, se hace un acercamiento a lo esencial
[11]. Para esto solo se usaron las prácticas que fueran necesarias en la iteración actual y se
adaptó el proceso a lo que demandara el proyecto. Aparte de lo anterior, integra una
práctica de ingeniería social, típica de las metodologías ágiles, lo que hace que EssUp sea un
híbrido entre algunos aspectos del Unified Process y las metodologías ágiles [12].
Esta metodología, al igual que otras formas del Unified Process, posee cuatro fases: Inicio,
Elaboración, Construcción y Transición [13]. Para este caso, solo se tomaron las tres
primeras fases, ya que se hizo énfasis en las necesidades del trabajo de grado, las cuales se
explican en esta sección, junto a cada fase. La fase de Transición se descartó ya que el
alcance del proyecto no consideró un despliegue total del algoritmo en una aplicación
funcional.
3.1. Fase 1: Documentación del Proceso y Diseño del Dispositivo
Esta es la fase de Inicio [13], en la cual se trabajaron todos los aspectos de la construcción y
formalización de la propuesta de trabajo de grado, aprovechando los contenidos de la
materia Seminario de Metodología de Investigación.
Página 6

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
3.1.1. Descripción de la fase
La primera fase consistió en la definición y formalización de la propuesta, esto implicó la
concepción de la idea a través de una pregunta generadora y la delimitación de su alcance.
El punto central del trabajo de esta fase fueron las actividades del curso Seminario de
Metodología de la Investigación. De forma paralela se realizó la construcción del Dispositivo
Ultrasónico, el cual fue necesario para el desarrollo posterior del algoritmo.
3.1.2. Actividades
Concepción de la idea a partir de temas de interés
Búsqueda de material bibliográfico
Definición de la problemática
Definición de la pregunta generadora
Justificación de la problemática
Definición de objetivos (general y específicos)
Definición de la metodología a usar
Creación del marco administrativo y financiero
Creación del marco teórico
Documentación sobre microcontroladores
Construcción del dispositivo electrónico
Pruebas del dispositivo electrónico en ambientes controlados
3.1.3. Resultados Esperados
Documento formal con la propuesta de Trabajo de Grado.
Aprobación de la propuesta de Trabajo de Grado.
Dispositivo Ultrasónico funcional.
Material bibliográfico de investigación.
Página 7
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
3.2. Fase 2: Obtención de Información y Diseño del Algoritmo de Procesamiento de Señales
Esta segunda fase es una combinación entre las fases de Elaboración y Construcción [13]. Se
hizo énfasis en el levantamiento de requerimientos y en el diseño del algoritmo para
integrarlo con el dispositivo electrónico obtenido como resultado de la fase anterior.
3.2.1. Descripción de la fase
En esta fase se trabajó el levantamiento de requerimientos como primer momento. Estos
requerimientos son la representación de las necesidades del público al que se dirigió el
algoritmo diseñado en esta fase, estos se refinaron mediante un proceso de observación
sobre las necesidades del público en su diario vivir. Para esto se contó con el apoyo de un
centro de ayuda a personas invidentes.
El segundo momento de esta fase consistió en el diseño del algoritmo de ecolicalización
basado en los requerimientos obtenidos y el uso del material bibliográfico obtenido en la
fase anterior. Principalmente se investigaron los parámetros acústicos del ultrasonido
mediante el dispositivo construido, es decir, el comportamiento de las ondas ultrasónicas
transmitidas en el aire y sus reflexiones tempranas, luego se dio paso a la exploración de
otros fenómenos como la difracción y el efecto Doppler. Una vez entendidos estos aspectos,
se inició la formalización del algoritmo de procesamiento de forma matemática y se
desarrolló en un lenguaje de programación.
Por último, se desarrolló la interfaz de usuario mediante mensajes de audio y vibraciones,
los cuales son producidos por funciones propias de Android. Se usó el asistente de voz que
viene integrado con el sistema operativo, ajustándolo al español. Las vibraciones se usaron a
manera de notificación de la aplicación creada.
Página 8

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
3.2.2. Actividades
1. Realizar un estudio sobre la movilidad de las personas invidentes en su diario vivir.
2. Documentar los requerimientos a partir del estudio realizado.
3. Priorizar los requerimientos teniendo en cuenta las necesidades del público
detectadas, el alcance y los objetivos del Trabajo de Grado.
4. Investigación de los parámetros y fenómenos acústicos del ultrasonido mediante el
dispositivo electrónico de la fase anterior.
5. Formalización matemática del algoritmo de procesamiento de señales.
6. Desarrollo del algoritmo de procesamiento de señales en un lenguaje de
programación.
7. Desarrollo de la interfaz de usuario mediante mensajes de audio.
3.2.3. Resultados Esperados
Documento de especificación de requerimientos.
Formalización matemática del algoritmo.
Código fuente del algoritmo de procesamiento de señales.
Sistema de ecolicalización funcional.
3.3. Fase 3: Diseño de Ambientes Controlados y Validación Estadística
Esta tercera fase es el componente de pruebas de la fase de Construcción [13]. Se trabajan
las pruebas del algoritmo de procesamiento obtenido como resultado de la fase anterior y
se toman cifras de satisfacción sobre los resultados de dichas pruebas.
3.3.1. Descripción de la fase
La tercera y última fase consta de la creación de ambientes controlados para la realización
de pruebas y la toma de datos sobre satisfacción. Estos ambientes se crearán con medidas
definidas por el grupo y una serie de obstáculos estáticos y en movimiento para validar el
funcionamiento del algoritmo obtenido como resultado de la fase anterior. Posterior a la
Página 9
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
realización de una prueba, se hace una encuesta al participante que consiste en preguntas
cerradas para determinar su grado de satisfacción respecto al sistema, basado en el Modelo
de Aceptación de Tecnologías o TAM por sus siglas en inglés (Technology Acceptance
Model), el cual es un modelo utilizado para estudiar la aceptación de una cierta tecnología
de un individuo, teniendo en cuenta la facilidad de uso de esta y su utilidad [14].
Al finalizar esta fase se analizan cuantitativamente los resultados obtenidos de las pruebas, y
se concluye si la solución propuesta cumple con los requerimientos obtenidos y refinados en
la segunda fase.
3.3.2. Actividades
1. Diseñar ambientes controlados destinados para pruebas.
2. Realizar las pruebas correspondientes con distintos sujetos, entre invidentes y
personas con visión.
3. Encuestar a los sujetos de prueba sobre el sistema.
4. Analizar cuantitativamente los resultados obtenidos en las pruebas.
3.3.3. Resultados Esperados
Documentación de las pruebas del sistema.
Encuestas basadas en TAM diligenciadas por los sujetos de prueba
Datos cuantitativos de las pruebas del sistema.
Conclusiones del trabajo realizado durante las tres fases.
Memoria del Trabajo de Grado.
Página 10

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
3.4. Calendario de Trabajo
En esta sección se explica el Calendario planeado del proyecto en contraste con el
Calendario de los eventos como realmente sucedieron, también plasmados en un
calendario.
Planeado
Ilustración 1: Diagrama Gantt de Calendarización del proyecto
La calendarización se basa en las fases propuestas dentro de la metodología del proyecto,
mediante esta metodología se obtienen los hitos más importantes, estos representan las
actividades más importantes del proyecto.
A continuación se muestra cada fase con sus actividades y sus fechas:
Fase 1
o Creación de dispositivo: 17 de Marzo al 17 de Abril del 2015.
o Documentación del proceso: 20 de Abril al 5 de Junio del 2015.
Fase 2
o Levantamiento de Requerimientos: 27 de Julio al 18 de Agosto del 2015.
o Creación del Algoritmo: 19 de Agosto al 18 de Septiembre del 2015.
o Documentación del Proceso: 21 de Septiembre al 2 de Octubre del 2015.
Fase 3
o Realización de Pruebas:
Página 11
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Pruebas en ambientes controlados - Personas Videntes: 5 de
Octubre al 9 de Octubre del 2015.
Pruebas en ambientes controlados - Personas Invidentes: 12 de
Octubre al 19 de Octubre del 2015.
o Validación TAM: 20 de Octubre al 30 de Octubre del 2015.
Segunda planeación y Ejecución
Durante el Trabajo de Grado se realizó un calendario de cómo se trabajaron las fases. Este
presenta una diferencia importante respecto a la primera planeación, debido a que pasaron
más de 6 meses entre la Primera Fase y la Segunda, en lugar de 2 meses. Este espacio de
tiempo se dio debido a que el grupo, por varios problemas, no pudo inscribir la materia de
Trabajo de Grado.
Ilustración 2: Diagrama Gantt de la Calendarización Ejecutada del proyecto
Al final del Trabajo de Grado, se tomaron las fechas reales de las fases, la cuales se
diferenciaron de la segunda planeación, debido a los diferentes contratiempos presentados
a lo largo de desarrollo del presente trabajo. A continuación se muestra cada fase con sus
actividades y sus fechas reales:
Fase 1
o Creación de dispositivo: 17 de Marzo al 17 de Abril del 2015.
o Documentación del proceso: 20 de Abril al 5 de Junio del 2015.
Fase 2
o Levantamiento de Requerimientos: 18 de Enero al 5 de Febrero del 2016.
o Creación del Algoritmo: 6 de Febrero al 2 de Mayo del 2016.
Página 12

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
o Documentación del Proceso: 3 de Mayo al 15 de Mayo del 2016.
Fase 3
o Realización de Pruebas:
Pruebas en ambientes controlados - Personas sin discapacidad: 16
de Mayo al 20 de Mayo del 2015.
o Validación TAM: 16 de Mayo al 20 de Mayo del 2016.
III - CONTRIBUCIONES
1. Conceptos Fundamentales
En esta sección se exponen los conceptos más importantes, pertinentes al Trabajo de Grado.
Estos conceptos tienen que ver con cada aspecto de la solución planteada, como los
principios físicos pertinentes y las tecnologías a usar.
Ecolicalización / Ecolocación
La ecolicalización es un sistema sensorial encontrado en animales como murciélagos,
delfines y ballenas dentadas, en el cual usualmente se emiten frecuencias más allá del rango
del oído humano (ultrasonido) y sus ecos o reverberaciones son interpretados para
determinar la dirección, la distancia y la forma de los objetos [8]. Muchos de estos
murciélagos buscan alimento en diferentes zonas oscuras, tales como insectos o frutas, y
necesitan un método de orientación espacial. En este caso es la ecolicalización.
Como se dijo anteriormente, los llamados emitidos van por encima del rango del oído
humano (20 Hz a 20 KHz). En comparación, los murciélagos pueden normalmente escuchar
sonidos con frecuencias de hasta 110 KHz a 110 dB, muy cerca del umbral del dolor humano.
Los sonidos se emiten de forma que su frecuencia varíe de alta a baja, o varía la intensidad
alrededor de una sola frecuencia, lo que les permite identificar obstáculos o a su presa para
evadirlos o capturarlos. Las diferentes especies de murciélagos se orientan dentro de
diferentes rangos de frecuencias que se ajustan a su entorno y a sus tipos de presas [15].
Página 13
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Acústica de interiores
Los diferentes materiales utilizados para la creación de estos espacios tienen diferentes
efectos o consecuencias, los cuales alteran el coeficiente de absorción total del recinto y el
tiempo de reverberación. Los materiales que producen estos efectos se enuncian a
continuación:
Absorción: Presencia de materiales absorbentes, resonadores (elementos
absorbentes selectivos), de la cantidad de personas presentes y de otros objetos
como sillas [16].
Reflexión (Reverberación): Presencia de elementos reflectores utilizados para
generar reflexiones útiles hacia el público, utilizado mayoritariamente en espacios
destinados a la palabra [16].
Difusión: Presencia de elementos difusores utilizados para dispersar en múltiples
direcciones la energía sonora [16].
La absorción del sonido se refiere a la reducción de energía asociada a las ondas sonoras. En
cualquier recinto cerrado, esta reducción y la propagación del sonido a través del aire al
incidir sobre sus superficies límite, determina la calidad acústica final de este. Este
fenómeno se da básicamente por los siguientes factores [16]:
Densidad de personas ubicadas en el recinto
Objetos ubicados en el recinto (sillas, mesas, etc.)
Materiales absorbentes y resonadores (absorbentes selectivos hechos en lana de
vidrio, lana mineral, espuma a base de resina de melanina y espuma de
poliuretano)
Toda superficie límite que pueda entrar en vibración, tal como puertas, ventanas y
paredes separadoras ligeras
El aire y su humedad relativa
Página 14
Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Materiales rígidos y no porosos utilizados para la construcción de paredes y techo,
tal como el hormigón macizo, los bloques de hormigón pintados y el ladrillo
revestido con yeso
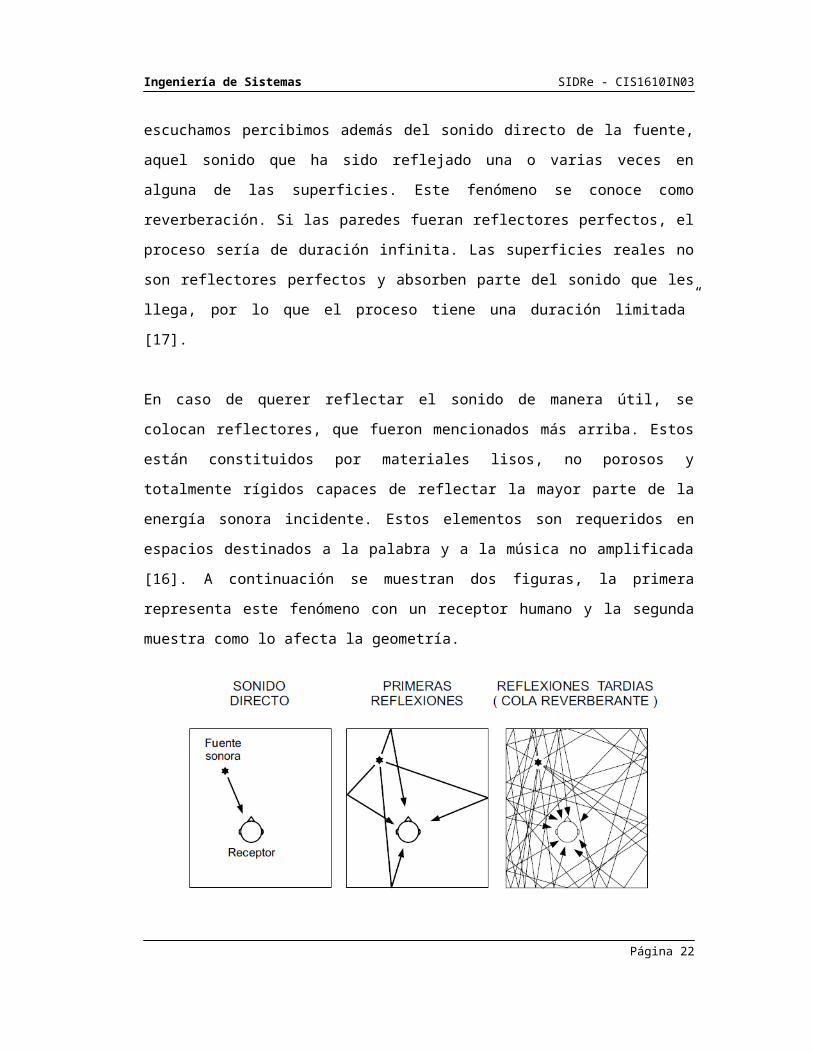
“En recintos cerrados, la energía de las ondas sonoras se refleja sucesivamente en las
paredes, suelo y techo. Cuando escuchamos percibimos además del sonido directo de la
fuente, aquel sonido que ha sido reflejado una o varias veces en alguna de las superficies.
Este fenómeno se conoce como reverberación. Si las paredes fueran reflectores perfectos, el
proceso sería de duración infinita. Las superficies reales no son reflectores perfectos y
absorben parte del sonido que les llega, por lo que el proceso tiene una duración limitada”
[17].
En caso de querer reflectar el sonido de manera útil, se colocan reflectores, que fueron
mencionados más arriba. Estos están constituidos por materiales lisos, no porosos y
totalmente rígidos capaces de reflectar la mayor parte de la energía sonora incidente. Estos
elementos son requeridos en espacios destinados a la palabra y a la música no amplificada
[16]. A continuación se muestran dos figuras, la primera representa este fenómeno con un
receptor humano y la segunda muestra como lo afecta la geometría.
Ilustración 3: Representación de las reflexiones del sonido [16]
Página 15
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 4: Acústica geométrica y su influencia en la Reflexión del sonido [16]
La difusión del sonido se refiere a la conservación de energía de las ondas sonoras y su
propagación en el aire, en este caso, en un recinto cerrado. Esto se consigue al colocar
elementos que dispersen la energía incidente en una o en múltiples direcciones. Todas las
superficies producen un cierto nivel de difusión, pero aquellas que tienen ornamentaciones,
nichos, irregularidades y relieves incrementan este fenómeno notablemente [16]. A
continuación se presenta una imagen que muestra este fenómeno sobre diferentes
superficies y como se propaga la energía de las ondas sonoras incidentes.
Página 16

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 5: Comparación entre absorción, reflexión y difusión [16]
Arduino
Es un tipo de microcontrolador utilizado para crear pequeños computadores que pueden
sentir y controlar el mundo físico más allá que un computador común. Esta plataforma es
open-source y consta de una placa programable o microcontrolador y un ambiente de
desarrollo de software exclusivo para esta. Puede ser integrado con dispositivos de entrada
como sensores o switches, dispositivos de salida como luces, motores, entre otros, y con
software que corre en un computador tal como Flash o MaxMSP [18].
Página 17
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Sensor Ultrasónico
Es un dispositivo que transforma energía eléctrica a mecánica para medir la distancia desde
el sensor hasta un objeto específico. Las ondas producidas por este dispositivo, bien lo dice
su nombre, son ultrasónicas, es decir, por encima del rango del oído humano (mayor a 20
kHz). Este sensor se categoriza de acuerdo al fenómeno por el cual funciona: piezoeléctrico
y electrostático. En este caso, se utiliza un sensor piezoeléctrico compuesto por un emisor y
un receptor [19].
El piezoeléctrico está formado por un disco hecho de un material piezocerámico fijado a un
disco de metal. La función de los materiales piezocerámicos es convertir señales eléctricas
en ondas que viajan por el aire, y viceversa. Cuando se aplica un voltaje a estos materiales,
se genera distorsión mecánica de acuerdo al voltaje y a la frecuencia. La placa piezocerámica
tiene forma de disco en el transmisor y es cuadrado en el receptor para producir vibraciones
de forma eficiente, y va fijada a una lámina de metal en forma de cono llamada resonador
[19].
El transmisor funciona al aplicar un voltaje sobre el piezocerámico que lo hace vibrar, esto
empuja las partículas de aire y genera una onda mecánica que se propaga de forma frontal
debido a la forma cónica del resonador. Este mismo concepto se aplica en el receptor pero
de forma inversa, es decir, la onda que golpea al resonador genera una vibración sobre el
piezocerámico, esto produce una corriente eléctrica la cual porta los datos de la onda
recibida [19].
Bluetooth
Es una tecnología de comunicaciones inalámbrica que se encuentra en una gran cantidad de
dispositivos, desde celulares y computadores hasta equipos médicos. Su intención es
reemplazar los cables que conectan a los dispositivos y mantener un nivel alto de seguridad.
Algunas de sus principales características son la ubicuidad, su bajo consumo energético y su
Página 18

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
bajo costo [20], lo que la hacen una tecnología excelente para la sincronización de
diferentes dispositivos.
La tecnología Bluetooth opera en la banda ISM (industrial, científica y médica) entre 2.4 GHz
y 2.485GHz, la cual no tiene restricciones de licencias. Usa un espectro ensanchado por salto
de frecuencia, full-dúplex, de 1600 saltos por segundo a una pequeña potencia de 2.5 mW.
Su salto es adaptativo entre 79 frecuencias a intervalos de 1 MHz, lo que significa que es
altamente inmune a interferencias y transmite de forma eficiente [20].
2. Trabajos Relacionados
Los trabajos relacionados en el área son aquellos que han resuelto problemas similares al
propuesto o altamente relacionados. En este caso, son trabajos que están dirigidos a
resolver el problema de orientar a personas invidentes en un ambiente específico. Es
oportuno mencionar que se obtuvieron 6 trabajos relacionados que tienen un fin similar al
de esta propuesta de Trabajo de Grado, estos se mencionan a continuación.
Ecolicalización ciega usando sensores Ultrasónicos
Este primer trabajo plantea una solución respecto a la orientación del invidente en
ambientes cerrados y abiertos. Para realizar este trabajo, se plantea el uso de unos
pequeños sensores ultrasónicos, que por medio de dos transductores utilizan el principio de
ecolicalización. Este dispositivo obtiene información del entorno de la persona y por medio
de un zumbador le da indicaciones de los resultados obtenidos, este se activa al detectar un
objeto cercano para evitar accidentes. Adicional a lo anterior, cuenta con una vara
extensible que sostiene todo cuerpo del dispositivo, una batería para su funcionamiento,
una correa para cargar el dispositivo en el hombro, una caja que contiene los sensores y
llantas para darle movilidad al usuario [9].
Página 19
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 6: Esquema del prototipo [9].
El dispositivo fue puesto a prueba en ambientes controlados, sus resultados no son
parecidos a lo esperado ya que la mayoría de los usuarios resaltaron la incomodidad de
cargar un dispositivo de este tamaño. Respecto a la parte ultrasónica, se evidenciaron
diferentes problemas tales como la no detección de objetos colgantes y las diferencias de
altura al movilizarse tales como huecos, escaleras, etc. Los problemas mencionados
anteriormente dan a entender que el problema se solucionó en una pequeña parte, ya que
estos aspectos son muy importantes para la población invidente y no fueron considerados
[9].
Tacit Project: Un sonar para invidentes
Este trabajo consiste en una solución similar a la planteada a lo largo de este documento.
Particularmente, esta solución tiene como objetivo orientar a una persona invidente en un
espacio cerrado por medio de un sensor ultrasónico ubicado en la muñeca, y cuenta con una
retroalimentación háptica por medio de dos servomotores que hacen presión sobre la piel al
detectar un objeto cercano [21]. El uso de este dispositivo es similar al de un bastón, ya que
requiere un esfuerzo de movimiento del brazo para obtener diferente información el
Página 20

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
entorno, y cuenta con un rango muy limitado. Su uso en la muñeca es un aspecto positivo,
no molesta al usuario al realizar acciones como comer o agarrar algún objeto [21].
Ilustración 7: Tacit Project y su concepto de banda en la muñeca [21]
El dispositivo cuenta con dos sensores ultrasónicos que están conectados a un Arduino,
quien se encarga de procesar la información obtenida y activar los servomotores que dan
retroalimentación al usuario sobre objetos cercanos [21]. Este utiliza una pila de 9V para
alimentar el sistema [21], pero representa una falla al no informar al usuario en caso de que
esta esté por acabar su carga. Lo anterior implica que el usuario seguirá usando el
dispositivo sin saber que este se encuentra sin batería, representando un riesgo potencial de
accidente.
UltraCane
Este trabajo toma un objeto ya existente y lo mejora de forma que solucione más
puntualmente el problema. Se trata de un bastón para invidentes que posee un sensor
Página 21
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
ultrasónico en su punta, y busca dar una nueva sensación de ambiente al usuario [22]. Al
tener conocimiento del funcionamiento de este invento, se puede manipular de mejor
forma la parte ultrasónica para crear una solución mejor.
Ilustración 8: UltraCane, en su modo para guardar [22]
Los sensores del bastón proveen una mayor precisión al poder recorrer una distancia mayor
a la que el bastón puede llegar [22]. Para informar al usuario, se usa una respuesta háptica,
que en este caso, se trata de un motor que vibra al detectar un obstáculo [22]. El gran
problema que existe en la utilización de este dispositivo, además del disgusto de usarlo (tal
como se explicó en secciones anteriores), es la facilidad para dañar el sensor al estar
expuesto a diferentes alturas respecto al suelo, tanto en interiores como en exteriores. Este
también puede llegar a abrumar a la persona debido a su constante vibración en terrenos
con varios desniveles.
Página 22

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Bastón Ultrasónico
Este es un Trabajo de Grado realizado en la Universidad Manuela Beltrán por estudiantes de
las carreras Ingeniería Biomédica e Ingeniería Electrónica. Consiste en un bastón que posee
tres sensores ultrasónicos, los cuales miden la distancia de un objeto en tres posibles
direcciones: izquierda, frente y derecha, en un rango de entre 15 y 20 cm [23]. Esta unidad
encargada de recoger y procesar los datos de los sensores se comunica con otro sensor que
va como pulsera en la mano del usuario, el cual informa mediante vibraciones la cercanía de
obstáculos [23].
Ilustración 9: Bastón Ultrasónico con su respectiva pulsera. Tomado de
http://www.umb.edu.co/images/noticias/ing-electronica/2.jpg
Al igual que UltraCane, los sensores se encuentran al nivel del suelo, lo cual puede dañarlos
al ser golpeados contra el piso, o en un caso de descuido, golpear un obstáculo. Igualmente
puede llegar a abrumar al usuario en terrenos con varios desniveles debido a su constante
vibración.
Uso de teléfonos inteligentes para ayudar a personas con discapacidad visual a localizarse dentro de un espacio cerrado
Este es un Trabajo de Grado realizado en la Pontificia Universidad Javeriana por estudiantes
de la carrera de Ingeniería de Sistemas. Consiste en el uso elementos de hardware y de
Página 23
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
software, que permiten a una persona con discapacidad visual conocer su localización
dentro de un lugar cerrado a través de una aplicación móvil, sin necesidad de usar un GPS
[24]. Además, el proyecto cuenta con retroalimentación al usuario de su localización
mediante un mecanismo de voz [24].
Ilustración 10: Esquemático paso a paso de cómo usar esta solución [24]
Esta aplicación resulta abrumadora para el usuario, ya que su mecanismo de voz se ejecuta
de forma repetitiva y puede llegar a molestar al usuario. Adicional a esto, dentro de ciertos
ambientes cerrados (como residencias), es más factible conocer los obstáculos que se
encuentran dentro de estos en comparación con conocer la localización de la persona. Si
bien conocer la ubicación actual es útil para los invidentes, no es suficiente a la hora de
caminar en estos ambientes cerrados.
Página 24

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Perro Lazarillo
Este animal tiene como objetivo orientar a una persona con discapacidad visual en todo tipo
de ambientes. Para ser lazarillo, un perro debe reunir ciertos aspectos de tamaño,
sociabilidad y vivacidad cerebral, siendo el Pastor Alemán, el Labrador Retriever y el Golden
Retriever los únicos que cumplen estas condiciones. Estos perros requieren normalmente un
año y 4 meses para considerarse aptos como Lazarillos, luego de pasar por una escuela de
adiestramiento y unas cuantas experiencias iniciales con su dueño [25]. A las afueras de
Bogotá, existe una escuela de adiestramiento para estos perros, la cual cuenta con el aval de
los ministerios de Transporte y de Medio Ambiente [26].
Algunos de estos son vistos ayudando a su dueño a conseguir asiento en un bus, cruzando
una calle y esquivando diferentes obstáculos. A pesar de contar con las capacidades para
hacerse cargo de una persona, hay que recordar que los Lazarillos son animales y como toda
mascota, deben ser cuidados en aspectos vitales como alimentación, higiene, salud y
buenos períodos de descanso, que pueden llegar a ser una carga más para el usuario.
Ilustración 11: Perros Lazarillos y sus dueños
Página 25
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008
Ingeniería de Sistemas SIDRe - CIS1610IN03
3. Justificación
Reuniendo los conceptos expuestos en este documento, se formuló la pregunta ¿cómo es
posible mejorar la calidad de vida de las personas con discapacidad visual mediante la
creación de un sistema que integre técnicas de orientación espacial? Como se mencionó en
secciones anteriores, es posible diseñar un dispositivo electrónico para simular la
ecolicalización como técnica de orientación espacial, y que a la vez sea cómodo y portable
para personas invidentes. Aunque ya existen algunos enfoques que emplean este principio
mediante sensores ultrasónicos, no aprovechan el uso de ciertas tecnologías portables como
lo son los teléfonos inteligentes.
El uso de soluciones no relacionadas a tecnologías de información es común entre la
población invidente, los mejores ejemplos de esto son los bastones y los perros lazarillos.
Como ya se mencionó en la sección Trabajos Relacionados, estos perros toman un largo
tiempo para ser adiestrados como guías (1 año y 4 meses), mientras que el dispositivo
electrónico se puede producir en serie en un tiempo menor y a un costo más bajo.
A diferencia de los lazarillos, los bastones no han sido ajenos a la integración de nuevas
tecnologías para proveer una mayor retroalimentación del entorno al usuario. En el caso de
los que usan sensores ultrasónicos como el UltraCane y el proyecto de los estudiantes de la
Universidad Manuela Beltrán, corren el riesgo de deteriorar el sensor mediante golpes al
suelo o, en un caso de descuido, a obstáculos. También pueden abrumar al usuario en
terrenos con desniveles.
También existen las soluciones que simulan la ecolicalización mediante dispositivos
electrónicos, pero estos se encuentran en una etapa experimental o son únicamente
difundidos en la página web de su creador. En estos casos, el tamaño juega un papel muy
importante, ya que un personaje invidente debe sentirse cómodo al hacer uso de estos
Página 26
Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
dispositivos. El dispositivo experimental no cumple con este criterio, debido a que no está
diseñado para cualquier ambiente y sus sujetos de prueba resaltaron lo incomodo de cargar
un dispositivo a la espalda [9], más grande que una simple mochila.
El segundo dispositivo, al ser basado en Arduino, se asemeja al presente trabajo de grado,
con la diferencia de que dicho dispositivo utiliza servomotores que presionan la piel del
usuario como retroalimentación [21]. Posee una pequeña capacidad de procesamiento ya
que utiliza un Arduino Pro Mini [27], así que sus funciones se limitan a hacer lecturas del
sensor y retroalimentar al usuario, sin hacer uso de un filtro para calcular la velocidad de
objetos en movimiento o tener en cuenta la velocidad del mismo usuario.
A diferencia de los microcontroladores, los teléfonos inteligentes son dispositivos con una
buena capacidad de procesamiento, pero han sido poco utilizados en soluciones para
invidentes. El caso expuesto en la sección anterior es uno de los pocos que hacen uso de
esta tecnología. Este brinda información respecto a la localización dentro de un
establecimiento, lo cual no resuelve el problema de orientación dentro de dicho lugar.
Debido a las desventajas que existen en los trabajos relacionados, se llegó a la conclusión de
que un sistema nuevo puede ser creado a partir del uso de un microcontrolador para
recoger datos de uno o más sensores ultrasónicos y enviarlos a un teléfono inteligente de
forma inalámbrica, el cual debe ejecutar un algoritmo para el procesamiento de dichos
datos y darle una retroalimentación precisa y confiable al usuario. De esta forma, se
aprovecha la capacidad de procesamiento de los teléfonos inteligentes y la versatilidad de
los microcontroladores para construir un dispositivo cómodo y portable.
Página 27
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
4. Descripción de la Solución
En esta sección se describe cómo fueron los pasos para diseñar y construir la solución
planteada. Dicha solución se dividió en dos módulos importantes: Arduino y Android.
Adicionalmente, se resaltan las restricciones de la solución y los estándares usados.
Diseño y construcción de la solución
El sistema consiste en dos módulos que interactúan para lograr un procesamiento eficiente
de la información recolectada. El primer módulo es un dispositivo electrónico que consta de
un sensor ultrasónico que recolecta la información del entorno. Dado que esto implica
conocimientos de electrónica avanzados, se optó por utilizar un microcontrolador como
Arduino o Raspberry Pi, que son plataformas electrónicas de código abierto basado en
hardware y software fáciles de usar y que están orientados a todo aquel que desee realizar
proyectos interactivos [18]. El segundo módulo consiste de una aplicación móvil, que
cumple la función de ejecutar un algoritmo de ecolicalización propuesto y comunicar los
datos a la persona invidente de forma entendible para esta (audio y vibraciones).
Se utilizó un teléfono inteligente ya que su capacidad de procesamiento es mayor a la de un
microcontrolador (se realiza una comparación entre un Samsung Galaxy S4 Mini y un
Arduino Mini Pro) [27] [28]. Para lograr comunicar estos dos módulos, se utiliza un
dispositivo Bluetooth en el primero para establecer una vía de transferencia de información
hacia el segundo.
A continuación se exponen en detalle el diseño y la construcción de los dos módulos
propuestos como parte de la solución, y su respectiva integración.
Página 28

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Arduino
Para lograr simular el mecanismo de ecolicalización, fue necesario crear un dispositivo
electrónico el cual debía contar con mínimo un sensor ultrasónico que emita y reciba ondas
mayores a 20 KHz. Se planteó un esquemático básico del módulo, donde se contemplaron
los componentes expuestos en la siguiente tabla.
Componente Cantidad Descripción
Sensor Ultrasónico HC-SR04 1
Emite ondas con una frecuencia de 40 KHz.
Útil para medir distancias desde 2 cm hasta 4
m con un ángulo máximo de 30° y un error de
3 mm [29]
Arduino Pro Mini 5V 1
Microcontrolador utilizado para recolectar
información de los sensores ultrasónicos y
realizar envíos a través de Bluetooth [27]
Modulo USB tipo A 1
Debido a que el Arduino a usar no posee su
propio módulo USB integrado, es necesario
integrar uno para subir el código
correspondiente a la solución
Bluetooth HC-05 1
Módulo que utiliza comunicación serial a
través de Bluetooth, puede ser Esclavo o
Maestro [30]
Protoboard/Breadboard 1
Debido a que se desea construir un prototipo,
se usa esta tableta para ubicar los
componentes enunciados [31]
Tabla 1: Materiales del módulo (versión 1.0)
Página 29
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 12: Esquemático base (versión 1.0)
Posteriormente, se construyó el primer prototipo del módulo. Este prototipo inicial
recolectaba información del sensor y la transmitía por comunicación serial a través del
Bluetooth cada 500 ms. Al tener solo un sensor habilitado, no existieron problemas de
interferencia con otro posible sensor ni lecturas sobrepuestas. En este enfoque, solo se
tomaron en cuenta los objetos que se encontraran al frente del usuario.
Página 30

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 13: Prototipo inicial sin uso de batería (esta foto fue tomada antes de colocar
el módulo Bluetooth)
Esta versión fue presentada en el primer semestre del 2015, en el marco de la feria de
posters de la materia Seminario de Metodología de Investigación, donde se mostró el
funcionamiento básico del dispositivo y como enviaría los datos al módulo de Android. Estos
datos fueron mostrados desde la pantalla de un computador, debido a que el receptor del
módulo Bluetooth no contaba con 3.3 V, voltaje con el cual trabaja para recibir datos del
Arduino, lo que hacía que el módulo no funcionara o trabajara por unos cuantos segundos
antes de apagarse.
Página 31
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
El siguiente paso consistió en integrar una batería de zinc-carbón de 9V como fuente de
alimentación del dispositivo para hacerlo independiente del USB como fuente, junto a un
switch de dos posiciones para prender y apagar el dispositivo sin necesidad de retirar la
batería mencionada. Como detalle adicional a lo propuesto como Trabajo de Grado, se
agregó un segundo sensor ultrasónico HC-SR04 con el objetivo de poder detectar cambios a
nivel del suelo como escalones, pendientes o huecos, siendo un complemento al bastón,
más no un reemplazo total. Por último, se agregaron dos (2) resistencias, de valores 2 KΩ y
4.7 KΩ respectivamente, para regular el voltaje en el receptor del Bluetooth a 3.3 V.
Para este prototipo se creó un esquema de circuito impreso o PCB (Printed Circuit Board), el
cual es una tarjeta que permite encaminar señales eléctricas entre diferentes puntos de
componentes soldados a estos y conectados entre sí a través de caminos [32]. Este se
realizó con el propósito de crear una vista previa del producto final en caso de poder crearlo
para la validación.
Ilustración 14: Mejora del prototipo inicial (versión 1.1)
Página 32

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 15: Posible circuito impreso de esta versión
Durante la actualización del prototipo, surgieron dos problemas graves que afectaron el
funcionamiento del módulo completo. Se encontró que el segundo sensor, para efectos de
pruebas, no se podía inclinar debido a que no podría hacer contacto con la protoboard.
Adicional a lo anterior, la protoboard utilizada en ese momento producía cortos,
específicamente en la zona donde estaba ubicada la batería, dejando el módulo sin
alimentación externa y, de nuevo, dependiendo del módulo USB como fuente de
alimentación.
El primer problema se resolvió mediante cables conectados a los pines del segundo sensor,
lo cual permitió moverlo e inclinarlo. El segundo problema fue solucionado mediante el
cambio de la protoboard por una nueva. Una vez solucionados ambos contratiempos,
aparece un nuevo problema, que consistió en que el módulo USB consumía toda la energía,
Página 33
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
privando al Bluetooth y al segundo sensor de la corriente necesaria para funcionar.
Curiosamente, esto solo sucedía al usar la batería para encender el módulo completo,
haciendo aún presente la dependencia del módulo USB como fuente de alimentación.
Ilustración 16: Prototipo modificado siguiendo el esquemático
Debido a los inconvenientes descritos anteriormente, se decide buscar un Arduino que
tuviera un módulo USB integrado a la placa, cantidad similar de pines digitales (13),
procesamiento (16 MHz) y medidas similares al Pro Mini (18x33mm) [27]. Después de una
exhaustiva búsqueda, se encuentra el Arduino Nano 3.0, el cual cuenta con características
similares al Pro Mini y un módulo USB tipo B integrado, solo su tamaño varía (18x45mm)
[33]. Gracias a este nuevo microcontrolador, se avanzó a la siguiente versión. Se planteó un
esquemático nuevo y su correspondiente representación en un esquema de circuito
impreso, donde se contemplaron los componentes expuestos en la siguiente tabla.
Página 34

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Componente Cantidad Descripción
Sensor Ultrasónico HC-SR04 2
Emite ondas con una frecuencia de 40 KHz.
Útil para medir distancias desde 2 cm hasta 4
m con un ángulo máximo de 30° y un error de
3 mm [29]
Arduino Nano 3.0 1
Microcontrolador utilizado para recolectar
información de los sensores ultrasónicos y
realizar envíos a través de Bluetooth [33]. Sus
pines trabajan a 5V.
Batería 9V 1Batería de zinc-carbón utilizada como fuente
de alimentación del módulo
Switch de 2 posiciones 1Switch que permite prender y apagar el
módulo
Bluetooth HC-05 1
Módulo que utiliza comunicación serial a
través de Bluetooth, puede ser Esclavo o
Maestro [30]
Protoboard/Breadboard 1
Debido a que se desea construir un prototipo,
se usa esta tableta para ubicar los
componentes enunciados [31]
Tabla 2: Materiales del módulo (versión 2.0)
Página 35
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 17: Nuevo esquemático (versión 2.0)
Ilustración 18: Circuito impreso de la versión 2.0
Página 36

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Luego de integrar el nuevo Arduino al módulo, los problemas de la versión anterior se vieron
resueltos y, adicionalmente, no se encontraron problemas nuevos. El tiempo de envío se
cambió para poder enviar más datos al módulo de Android y tener una mejor
retroalimentación de lo que capta el sensor, este nuevo tiempo fue de 100 ms.
Ilustración 19: Prototipo actualizado según el esquemático
Android
Este módulo se creó con el propósito de aprovechar la capacidad de procesamiento de los
smartphones, que es grande en comparación a la de los microcontroladores. Para iniciar con
la programación de este, se recurrió al uso de Android Studio como ambiente de desarrollo.
Cabe resaltar que este módulo se inició luego de la implementación de la versión 1.1 del
módulo de Arduino, la cual lograba transmitir los datos requeridos. También, se hizo un
levantamiento de requerimientos y un diseño de casos de uso, los cuales describen el diseño
del sistema y su funcionamiento orientado a la comodidad de las personas invidentes.
Página 37
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Como primer momento, se creó una aplicación base con una interfaz de usuario sencilla,
que recibía los datos del módulo de Arduino por medio del Bluetooth del teléfono. Esta app
sirvió como verificación de que, efectivamente, el módulo de Arduino funcionaba como se
había esperado, enviando los datos de distancia recogidos del primer sensor, sin importar si
se trataba de ruido o el dato exacto.
Posteriormente, se diseñó un primer algoritmo, el cual tenía en cuenta un intervalo de
tiempo t=500 ms para la recepción de cada dato. En este se planteó la velocidad como la
derivada de la posición respecto al tiempo, y sus unidades corresponderían a cm/ms.
dxdt
→ v [ cmms ]
Ecuación 1: Definición de velocidad y sus unidades
Se planteó el uso de una escala con tres regiones importantes llamadas safe, regular y
danger. Esta fue creada a partir de una fórmula donde se tenía en cuenta el tiempo, el dato
de posición actual y un acumulado de datos de posición divididos en el tiempo en un rango
de tiempo. Esta última variable sería usada como calibración para determinar la velocidad
del usuario y sería personalizada para el este.
y=t ∆ x
∆ tx
Ecuación 2: Fórmula para generar los valores de la escala
Los valores máximo y mínimo de la escala se determinaron teniendo en cuenta las distancias
máxima (xmax=400 cm) y mínima (xmin=2cm) posibles del sensor, un tiempo
t=1000 ms=1 s y una velocidad que consistía en la mitad del intervalo de distancias
posibles en el tiempo en que se enviaba un dato (v=199 cm /500 ms=0.39 cm /ms). A
partir de estos valores, se calculó la mitad de este rango, junto a sus cuartos, para
determinar las tres regiones planteadas.
Página 38

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
ymax=1000∗0.39
2=195 ymin=
1000∗0.39400
=0.975
Ecuación 3: Valores máximo y mínimo de la escala propuesta
En este primer modelo se encontraron inconsistencias tal como la falta de respuesta en
tiempo real, la velocidad del objeto captado por el sensor y la filtración de la señal para
eliminar el ruido propio del medio. Para solucionar uno de estos problemas se recurre a un
modelo matemático que se acerca al comportamiento de los murciélagos cuando cazan
[34]. Este segundo modelo se construye reemplazando al murciélago por el usuario, y la
presa por un objeto, y su movimiento en dos dimensiones por una sola dimensión, que es la
que se encuentra al frente del sensor.
d xu ( t )dt
=vu ( cos (30° ) )d xo (t )
dt=vo (cos (θ ( t ) ) )
Ecuación 4: Modelo de velocidad de Usuario y Objeto
Se define la velocidad del usuario en función del ángulo máximo del sensor (30°), el cual se
toma como factor de calibración, y la velocidad del objeto en función de su ángulo en el
tiempo respecto al sensor (0 ° ≤θ ( t )≤ 30°). Por simplicidad del modelo, se omite todo lo
referente a dirección, ya que este problema es de una sola dimensión.
Para integrar este segundo modelo a la fórmula de escala ya planteada, se propone una
forma de calcular las velocidades a partir de los datos ya recogidos en un intervalo de
tiempo. Se tomó un intervalo de tiempo de t=500 ms, con un tiempo de muestreo de
t n=100 ms, lo que quiere decir que se tenían en cuenta n=5 muestras. Luego de tomadas
las muestras, se calculaba el promedio de estas y se dividía en el tiempo t para tener la
velocidad del objeto, omitiendo el ángulo del objeto ya que no había forma de saber este
dato. Para la velocidad del usuario, se realizaría una calibración con una fórmula similar a la
Página 39
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
anterior, donde sí se tendría en cuenta el ángulo del máximo del sensor teniendo como
objeto un muro.
vo=1
t∗n∑i=1
n
xoivu=
30t∗n∑i=1
n
xoi
Ecuación 5: Fórmulas de velocidad para Objeto y Usuario (calibración)
y=t ( vo+vu )
xo
Ecuación 6: Fórmula de escala adaptada al nuevo modelo
El segundo modelo resolvió el problema de la calcular velocidad del objeto captado por el
sensor, pero aún persistían la ausencia de respuesta en tiempo real y la filtración de la señal.
Para plantear el tercer modelo, se pidió asesoría del profesor Leonardo Flórez Valencia,
quien sugirió el uso del Filtro de Kalman, el cual es un método recursivo de estimación
óptima, es decir, infiere parámetros de interés de observaciones inciertas e inexactas, y
procesa nuevos datos a medida que ingresan al sistema, siempre y cuando las variables sean
aleatorias y tengan una distribución gaussiana [35].
Este filtro se define a partir de un estado donde se tiene posición y velocidad: xk=[ pv ].
Como se mencionó anteriormente, las variables son aleatorias y tienen una distribución
Gaussiana, lo que implica que cada variable tenga una media μ como centro de su
distribución, y una varianza σ 2, la cual se interpreta como la incertidumbre. Para este caso,
la variable que se asume como aleatoria es la posición, mientras que la velocidad tiene fines
estadísticos para realizar las predicciones sobre la posición.
Para modelar un estado como una distribución Gaussiana en un tiempo k se necesitan la
mejor estimación xk (lo que se definió anteriormente como la media μ), y su matriz de
covarianza Pk, la cual representa la correlación de las variables a tratar, sus elementos se
Página 40

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
nombran Σij. Cabe resaltar que al ser una función de predicción, no concierne si el estado es
el real, lo importante es que trabaja sobre todos y arroja una nueva distribución [36].
xk=[ pv ]Pk=[Σ pp Σ pv
Σvp Σvv ]Ecuación 7: Variables del estado
Se revisa el estado actual en un tiempo k−1, para predecir el siguiente estado, en un
tiempo k . Este paso de predicción se puede representar con una matriz Ak , también
llamada matriz de transición, la cual toma todos los puntos de la estimación original y los
lleva a una nueva localización predicha, que es a donde se movería el sistema si la
predicción original fuera la correcta. Para actualizar la matriz de covarianza se actualiza
mediante la matriz identidad [36].
La influencia externa es todo factor que puede afectar el sistema desde el mundo exterior.
Esta se representa mediante la matriz Bk y el vector uk , los cuales añaden dichos factores a
la predicción, para tomarlos como una corrección. En sistemas simples se puede omitir ya
que seguramente estos no tienen influencia externa. Adicionalmente, se modela la
incertidumbre asociada al mundo exterior mediante la matriz Qk, la cual representa la
covarianza de las influencias que no se pueden seguir y que serían ruido. Todo lo anterior se
resume en las ecuaciones mostradas a continuación.
xk=A k xk−1+B k uk
Pk=A k P k−1 AkT+Qk
Ecuación 8: Ecuaciones de la fase de Predicción
Posteriormente se procede a refinar la predicción mediante la matriz de transición de la
medida H k. Esto permite entender la distribución esperada de las lecturas del sensor
mediante su media μesperada=H k xk, y su covarianza Σesperada=H k Pk H kT . Gracias a la
incertidumbre de los sensores, es más probable que algunos estados por encima de otros
Página 41
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
hayan producido la última lectura. Por esto, la covarianza de la incertidumbre producida por
ruido del sensor se representa en la matriz Rk , y su media, que es la última lectura
registrada, se representa en el vector mk.
Para este momento se tienen dos distribuciones Gaussianas, una correspondiente a la
predicción realizada y otra a la lectura del sensor. Al multiplicar estas dos distribuciones, se
obtiene una nueva distribución más precisa que las dos anteriores, donde la media de esta
nueva es la configuración para la cual ambas estimaciones tienen mayor probabilidad, y por
tanto, es la mejor estimación. La multiplicación de estas distribuciones se expresa mediante
la matriz K, llamada también Ganancia de Kalman.
K=P k H kT ( H k Pk H k
T+Rk )−1
Ecuación 9: Ganancia de Kalman
Retomando la media y covarianza esperadas, y agregando los términos anteriormente
mencionados, se obtiene la actualización del estado, en donde xk' es la nueva mejor
estimación y Pk' su error respectivo. Esta fase está compuesta por las ecuaciones mostradas
a continuación. Para una explicación matemática más detallada, se debe revisar el Anexo 3.
xk' = xk+K (mk−H k xk )
Pk' =P k−K H k Pk
Ecuación 10: Ecuaciones de la fase de Actualización
La implementación del algoritmo fue posible gracias al trabajo en conjunto con el profesor
Leonardo, ya que él proveyó el código necesario para implementar el filtro, mientras que el
grupo implementó una clase de Matriz, la cual permite realizar operaciones entre vectores y
matrices como suma, resta, multiplicación, transpuesta e inversa. Este filtro fue
implementado en C++, mientras que el resto de la aplicación (recepción del Bluetooth y
asistente de voz) fue implementada en Java. Para unir estos dos lenguajes en un ambiente
de cross-compile, se utilizó el Native Development Kit (NDK) de Android, que es una
Página 42

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
herramienta que permite implementar módulos de una aplicación de Android en C o C++
[37].
El NDK de Android soporta el código nativo gracias al Java Native Interface (JNI), el cual es
una interfaz que permite escribir métodos nativos en Java y embeber aplicaciones nativas
en la máquina virtual de Java [38]. En este caso, se requirió implementar una interfaz JNI en
C++ para poder usar el filtro por medio de un método nativo en Java, esta interfaz se
encarga de recibir datos del Bluetooth como un parámetro y devolver la mejor estimación
calculada por el filtro.
La implementación de la clase Matriz fue necesaria debido a que el filtro hecho por el
profesor Leonardo realizaba todas sus operaciones de algebra lineal utilizando una librería
llamada ITK (Insight Toolkit). La documentación sobre la compilación de esta librería en
Android es casi nula, y las guías que existen sobre esto se encuentran incompletas o mal
redactadas. Debido a esto y a que las matrices utilizadas para este problema son pequeñas
(tamaño máximo de 2x2), se toma la decisión de implementar dicha clase para realizar las
operaciones necesarias para el funcionamiento del filtro.
Luego de integrar el algoritmo a la aplicación base, se dio paso a la implementación del
asistente de voz de la aplicación, el cual considera 3 rangos para dar diferentes tipos de
retroalimentación. En el primer rango de 2cm a 100cm el asistente emite un mensaje de
emergencia de audio donde se advierte al usuario que existe un obstáculo muy cerca al
frente, el cual se repite cada 10 segundos. En el segundo rango de 101cm a 150cm el
asistente hace que el celular vibre por 5 segundos, cada 5 segundos para hacer consiente al
usuario de que hay un riesgo potencial al frente. En el tercer rango el asistente no genera
advertencias, ya que el usuario se encuentra fuera de peligro y a una distancia prudente de
un obstáculo.
Página 43
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Integración
Una vez terminado el módulo de Android, se procedió a crear una caja especial para alojar el
módulo de Arduino para facilitar el uso del mismo en la etapa de pruebas. En esta
integración, se aplicó el filtro solo al primer sensor, que es aquel que detecta los obstáculos
que se encuentran al frente del usuario. El sensor de desniveles en el suelo fue retirado
debido a que este presentaba fallas constantes y por su carácter opcional para este Trabajo
de Grado, lo que llevó a diseñar el ambiente para las pruebas sin desniveles. Esta caja se
explica con mayor detalle en la sección de Validación.
Ilustración 20: Aplicación en funcionamiento y Caja alojando el sensor
El siguiente diagrama describe los componentes esenciales del sistema. Como se puede
observar, este está repartido en los dos dispositivos físicos: el sistema AKLAS-Android, en un
Smartphone y AKLAS-Arduino en el dispositivo Arduino. Este último no posee componente
de visualización, solo obtiene los datos del tiempo y mediante el Serial Port Print, los envía
al Android. Una vez obtenida la información pasa por el mecanismo de recepción Bluetooth
Página 44

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
para ser totalmente procesado por el filtro de Kalman y así obtener la correspondiente
notificación.
Ilustración 21: Diagrama de Despliegue del proyecto
Página 45
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Restricciones
Distancia máxima
Como se describió en secciones anteriores, los sensores ultrasónicos utilizados solo pueden
medir distancias desde 2 cm hasta 4 m con un ángulo máximo de 30°. Esto significa que todo
obstáculo que se encuentre a más de 4 m o de 30°, no será tenido en cuenta en la lectura de
datos y su posterior filtrado.
Vida útil de la batería
Las baterías de 9V son conocidas por ser poco eficientes, especialmente cuando estas no
son recargables. Frente a un consumo de 20 mA por parte del dispositivo, al utilizar baterías
de Zinc-Carbón con capacidad de 400 mAh (miliamperios por hora) o Alcalinas con
capacidad de 550 mAh, el dispositivo puede funcionar por 14 horas o aproximadamente 19
horas respectivamente. Estos tipos de baterías son útiles para dispositivos de bajo drenaje,
además del hecho de que son baratas [39].
Para lograr que el dispositivo funcione por más tiempo, se recomienda el uso de baterías
recargables, las cuales pueden ser de Hidruro de Nickel-Metal (NiMH), Nickel-Zinc (NiZn) o
Alcalinas recargables. Si bien estas baterías pueden proveer una mayor duración, poseen
algunos problemas que se deben tener en cuenta, por ejemplo, las baterías NiZn puede
quemar las luces led o algunos circuitos rápido debido a su alto voltaje [39].
Estándares
EssUp (Essential Unified Process)
Metodología basada en los procesos unificados, metodologías agiles y el modelo de
madurez de procesos. Cada uno de estos aporta diferentes capacidades a la metodología
como una estructura definida, agilidad y mejora de procesos. Es una mejora a RUP que
consiste en identificar diferentes prácticas de desarrollo iterativo, se basa en casos de uso,
prácticas para el equipo y los procesos [11]. El proceso de EssUp confía en la separación de
Página 46

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
intereses, lo cual ayuda a identificar y asignar intereses en un cierto orden de prioridad,
además de simplificar y encaminar el proceso a una meta específica mediante un enfoque
determinado [11].
Comunicación Serial
Protocolo de comunicación entre dos dispositivos en el cual la información se envía a través
de un flujo de bits, donde solo pasa un bit a la vez. Este es asíncrono, es decir, no requiere
de un reloj externo para realizar intercambios de información. Entre los dispositivos más
comunes que usan este protocolo se destacan los módulos GPS, Bluetooth, Xbee y pantallas
LCD seriales [40].
Este protocolo posee cuatro mecanismos que aseguran una transferencia de datos robusta y
sin errores, siendo los últimos tres parte del entramado que se envía. Estos se explican a
continuación.
Baud Rate (velocidad de transmisión): define que tan rápido se envían los datos a
través del flujo, expresado en bits por segundo (bps). Ambos dispositivos deben
funcionar a la misma velocidad [40].
Bits de datos: Bits que corresponden a los datos a enviar, estos pueden variar entre
5 y 9 bits. Ambos dispositivos deben acordar si el bit más significante llega primero,
o al contrario [40].
Bits de sincronización: Estos corresponden a los bits de inicio y de final de la trama.
El final puede estar compuesto por 1 o 2 bits, mientras que el inicio solo contiene 1
bit [40].
Bit de paridad: Se usa para realizar un chequeo de errores de bajo nivel. Para
obtener estos bits, se deben sumar los bits de datos y dependiendo si la suma es par
o impar, se coloca o no el bit respectivamente. Este es opcional debido a que puede
hacer más lenta la transmisión y requiere que ambos dispositivos posean una
implementación de manejo de errores. Solo se reserva para medios de transmisión
con mayor presencia de ruido.
Página 47
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Bluetooth
Tecnología de comunicaciones inalámbrica que se encuentra en una gran cantidad de
dispositivos, desde celulares y computadores hasta equipos médicos. Su intención es
reemplazar los cables que conectan a los dispositivos y mantener un nivel alto de seguridad.
Algunas de sus principales características son la ubicuidad, su bajo consumo energético y su
bajo costo [20], lo que la hacen una tecnología excelente para la sincronización de
diferentes dispositivos.
La tecnología Bluetooth opera en la banda ISM (industrial, científica y médica) entre 2.4 GHz
y 2.485GHz, la cual no tiene restricciones de licencias. Usa un espectro ensanchado por salto
de frecuencia, full-duplex, de 1600 saltos por segundo a una pequeña potencia de 2.5 mW.
Su salto es adaptativo entre 79 frecuencias a intervalos de 1 MHz, lo que significa que es
altamente inmune a interferencias y transmite de forma eficiente [20].
Serial Port Profile (SPP)
Protocolo implementado sobre Bluetooth que permite definir puertos seriales virtuales. Este
se utiliza cuando se requiere cambiar la interfaz de comunicación serial entre dos
dispositivos, típicamente RS-232 y UART, por Bluetooth [41]. Para lograr la transmisión de
datos, se definen dos roles cruciales:
Dispositivo A: Crea la conexión a otro dispositivo [42].
Dispositivo B: Espera a un dispositivo que tome la iniciativa de conectarse [42].
Las aplicaciones en ambos dispositivos no conocen el funcionamiento del Bluetooth, solo
conocen el uso de puertos seriales, por tanto, se emulan los puertos seriales mediante un
API provisto por el módulo Bluetooth en uso [42].
Página 48

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Arduino
Es un tipo de microcontrolador utilizado para crear pequeños computadores que pueden
sentir y controlar el mundo físico más allá que un computador común. Esta plataforma es
open-source y consta de una placa programable o microcontrolador y un ambiente de
desarrollo de software exclusivo para esta. Puede ser integrado con dispositivos de entrada
como sensores o switches, dispositivos de salida como luces, motores, entre otros, y con
software que corre en un computador tal como Flash o MaxMSP [18].
Android
Sistema operativo para teléfonos inteligentes y tabletas, creado por Google, se encuentra en
cientos de millones de dispositivos móviles en más de 190 países en el mundo [43]. Android
es open-source, es decir, los fabricantes no deben pagar a Google para usarlo o modificarlo.
Permite comprar o descargar gratis aplicaciones desarrolladas por diferentes usuarios que
desean sacar un mayor potencial del teléfono [44].
SRS (Software Requirement Specification)
Documento que sirve como especificación de un producto de software en particular con un
objetivo determinado. Este debe únicamente definir los requerimientos de software del
proyecto, sin dar detalles de diseño, verificación o administración y planeación del proyecto
[45].
TAM (Technology Acceptance Model)
Modelo desarrollado para estudiar la aceptación de una tecnología para un grupo de
individuos, donde se evalúan la facilidad de uso y la utilidad percibidas de dicha tecnología
[14]. Debido al crecimiento de los costos en la producción de nuevas tecnologías, la poca
aceptación y subutilización de algunas de estas, es necesario realizar este estudio en una
etapa de investigación [46].
Página 49
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
5. Validación
Como se ha mencionado en secciones anteriores, se utiliza el Technology Acceptance Model
(TAM), el cual plantea evaluar la aceptación de una nueva tecnología en 2 áreas principales:
Utilidad Percibida (U) y Facilidad de Uso Percibida (E). A partir de estas áreas principales,
teniendo en cuenta las variables externas a la tecnología, se derivan 2 nuevas áreas como
complemento a las anteriores: Actitud hacia el Uso de esta tecnología (A) y la Intención de
Conducta de Uso (BI).
Se diseñó una encuesta de 8 preguntas que son pertinentes a las 4 áreas planteadas
anteriormente. Cada pregunta establecía una escala de 1 a 5, donde 1 es improbable y 5
probable. La intención de esta fue analizar el impacto del sistema de forma cuantitativa, y
observar qué tanta aceptación tendría el mismo. Para visualizar el formato de encuesta, ver
el Anexo 4.
Ilustración 22: Áreas del Technology Acceptance Model a trabajar [46]
Para facilitar el porte del sensor durante las pruebas, se planteó crear una caja para alojar el
módulo de Arduino, y que este se pudiera usar a modo de cinturón. Se diseñó un primer
modelo, el cual estaba hecho de un aglomerado de madera, con un grosor de 0.5 cm. Este
diseño resultó ser complicado y lento, debido a que la madera debió ser cortada y lijada
Página 50

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
para crear solo una cara. Una vez terminadas las caras, se realizó el intento de unirlas de
distintas formas (pegante, silicona y clavos) pero sin un resultado satisfactorio, lo cual tuvo
como consecuencia el planteamiento de un nuevo diseño.
Ilustración 23: Caja hecha en madera (Primer diseño)
En este nuevo modelo se tuvo en cuenta un aspecto importante: la caja no está relacionada
directamente a la propuesta de Trabajo de Grado. Para evitar más complicaciones, se optó
por comprar una caja de cartón que tuviera aproximadamente el tamaño de la protoboard
en que se montó el módulo de Arduino. Luego de adaptar la caja para alojar dicho módulo,
se colocó un cinturón en la parte posterior de esta para que los usuarios pudieran portarla
con facilidad.
Página 51
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 24: Caja alojando el módulo de Arduino
Ilustración 25: Caja de cartón (Segundo diseño)
Para crear el ambiente controlado, se reservó la de la Facultad de Ingeniería de la Pontificia
Universidad Javeriana. En este lugar se plantearon 3 corredores principales: el primero en la
entrada de la sala, el segundo en la división entre las mesas de computadores, y el tercero al
fondo de la sala. Adicionalmente, se acomodaron sillas apiladas para actuar como
obstáculos. Este ambiente se diseñó con el propósito de observar el comportamiento del
usuario en cada uno de los 3 rangos planteados en la sección anterior.
Página 52

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 26: Primer corredor
Ilustración 27: Segundo corredor
Página 53
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 28: Tercer corredor (derecha)
Ilustración 29: Tercer corredor (izquierda)
Página 54

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
El recorrido en el ambiente se inició desde el corredor de entrada, caminando derecho hasta
toparse con las sillas apiladas. El usuario debía girar hacia donde el sistema no le advirtiera
algún riesgo (a la derecha de las sillas), pasando al segundo corredor, donde debía caminar
hasta encontrar el tercer corredor. En caso de que quisiera girar, existían obstáculos que no
le permitirían seguir y lo forzarían a caminar hasta el fondo. En el tercer corredor, el usuario
tenía la opción de girar hacia la derecha o izquierda, para llegar al final de este pasaje que
marcaría el fin del recorrido.
Para las pruebas con invidentes, se contactó al Centro de Rehabilitación Para Adultos Ciegos
(CRAC) en la ciudad de Bogotá. Gracias a la doctora Esperanza González, se consiguió un
espacio en las instalaciones de la fundación para realizar las pruebas. Este consistió en un
pasillo de 10m, en el cual existe una puerta de vidrio y, adicionalmente, se iban ubicando
obstáculos como sillas o personas que muy amablemente colaboraron con la actividad. Los
sujetos de prueba debían recorrer el pasillo de ida y vuelta, desviándose al encontrar un
obstáculo.
6. Validación y Resultados
Este trabajo parte de la hipótesis de que la aplicación de electrónica digital a un sistema de
Ecolocalización produce una mejora significativa en la orientación de personas invidentes en
espacios cerrados. Para la validación de la solución se plantea la hipótesis de que la
aplicación de un algoritmo de estimación a un sistema de Ecolicalización muestra una
mejora significativa en la orientación de personas invidentes en espacios cerrados. Esta
segunda hipótesis busca complementar la primera para generar sistemas menos complejos
y distribuidos en función de mejorar la orientación de personas invidentes.
El sistema posee un error inherente de 0.03 cm por medida y un error para la iteración
actual del Filtro, calculado en la matriz de covarianza Pk' . Estos errores se encuentran
controlados mediante el Filtro de Kalman, lo que genera una mayor confiabilidad en el
sistema propuesto para la realización de la validación.
Página 55
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Pruebas Videntes
Las pruebas se realizaron con una muestra de 10 estudiantes entre los 18 y los 23 años de
edad, sin discapacidad alguna. Estos fueron vendados antes de usar el sistema, y adaptados
a este mediante el porte y ajuste del cinturón y la caja del módulo de Arduino, y la ejecución
del módulo de Android. Los sujetos de prueba atravesaron el ambiente creado de la forma
que fue explicada en la sección anterior. Los horarios en que fueron observados estos casos
de prueba corresponden a las franjas de 11 am a 1 am y de 6 pm a 8 pm del 21 de Mayo de
2016.
Adicionalmente, para visualizar el comportamiento de los datos tomados contra los datos
filtrados, se utilizó la aplicación web Ubidots, la cual permite monitorear cifras de sensores a
través de internet y generar gráficas de los datos recibidos en ciertas partes del ambiente.
Esto se agregó al módulo de Android, donde se enviaron los datos anteriormente
mencionados para ser graficados y contrastados. En cada caso se generaron dos gráficos:
uno azul para representar los datos tomados por el sensor y uno verde para representar los
datos procesados por el filtro.
Primera Franja
Durante la primera franja, se dieron comportamientos inusuales de la aplicación de Android,
entre las que se destacan un retardo de 2 segundos entre el cálculo del dato filtrado y la
reacción del asistente de voz, el cual también afectaba la toma de datos del Bluetooth y su
filtrado. A continuación se explica el comportamiento de cada sujeto de prueba, que en
total fueron 4 en dicha franja.
Sujeto 1
Este primer sujeto caminó lentamente por el ambiente debido a su prevención con los
obstáculos. Al visualizar el comportamiento de los datos, se evidencia cómo el filtro, entre
Página 56

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
más datos tenga, elimina más picos de ruido y estabiliza las lecturas, lo que quiere decir que
el filtro aprende con el paso del tiempo para ser más tiempo. Cuando existen cambios
drásticos en un punto del tiempo de ejecución donde el filtro ha tenido un gran aprendizaje,
este se demora en llegar a este valor nuevo debido a que al filtro de Kalman también se le
conoce como un estimador de regresión lineal.
Durante esta prueba, se detectó por primera vez el retardo, medido en un tiempo de 1
segundo para este caso. Aunque este sujeto fue bastante prevenido con los obstáculos, fue
posible detectar este problema para rastrearlo durante el resto de la franja.
Ilustración 30: Comportamiento del Filtro en el sujeto vidente 1
Sujeto 2
El segundo sujeto, debido a su gran estatura, presentó una dificultad para el sensor al
detectar las sillas apiladas en el primer corredor. Este problema fue solucionado
reemplazando las sillas por una persona. Durante esta prueba se reafirmó el
comportamiento de los datos arrojados por el filtro y se detectó el retardo de nuevo, esta
vez con una medida de 2 segundos gracias a la rápida reacción de este sujeto frente a
cambios en su entorno. A partir de este caso se empezaron a presentar diferencias grandes
en las gráficas de comportamiento debido al retardo, el cual afectó el procesamiento de
Página 57
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
datos tomados del sensor, y llevó a la decisión de no tener en cuenta más gráficas por el
resto de la franja.
Ilustración 31: Comportamiento del Filtro en el sujeto vidente 2
Sujeto 3
Este sujeto, al igual que el primero, se encontraba prevenido con los obstáculos. El retardo
fue notable en las gráficas, mientras los datos tomados por el sensor llegaban bien, los datos
filtrados estaban atrasados y mostraban un comportamiento anómalo respecto a lo que
sucedía en los diferentes momentos del recorrido. La nueva medición del retardo arrojó 2
segundos, reafirmando la medida anterior.
Sujeto 4
Este sujeto, al igual que el segundo, era más alto que las sillas apiladas y de reacción rápida
a cambios en su entorno. El retardo fue notable en el asistente de voz y en las gráficas
nuevamente. La nueva medición del retardo arrojó 2 segundos, reafirmando la medida
anterior. Terminada esta franja de pruebas, se procedió a solucionar los problemas
evidenciados al usar el sistema para tener mejores resultados en la segunda franja.
Página 58

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Segunda Franja
Antes de la segunda franja, se solucionó el retardo de 2 segundos presentado en la franja
anterior. Este retraso se presentaba debido a que algunas actividades que se debían hacer
en paralelo, se trabajaron secuencialmente. Durante la observación de los sujetos en este
lapso de tiempo, no se presentaron nuevas anomalías. A continuación, continuando con la
numeración de la sección anterior, se explica el comportamiento de cada sujeto de prueba,
que en total fueron 6.
Sujeto 5
Este sujeto tuvo la misma particularidad que los sujetos 2 y 4 en cuanto a su estatura, con la
diferencia de que este se encontraba más prevenido que los otros dos mencionados. En la
gráfica de comportamiento de este sujeto se evidencia la eliminación del retardo, ya que los
comportamientos corresponden a lo que sucedía en ese instante de tiempo en el ambiente.
El accionar del filtro fue mucho más evidente en este caso, se visualiza como no obedece a
los picos de ruido del sensor y estabiliza las medidas respecto a su predicción.
Ilustración 32: Comportamiento del Filtro en el sujeto vidente 5
Página 59
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Sujeto 6
El séptimo sujeto se mostró confiado a la hora de utilizar el sistema, por lo que su reacción a
los cambios en el entorno fue rápida. Gracias a su seguridad al caminar, se pudo ver una
gran cantidad de ruido en las lecturas del sensor, y qué tan bien cumple el Filtro con su
tarea.
Ilustración 33: Comportamiento del Filtro en el sujeto vidente 6
Sujeto 7
El caso de este sujeto fue particular, ya que por su baja estatura se acomodaba
perfectamente al ambiente, y su prevención con los obstáculos permitió al Filtro tener un
gran accionar con el ruido mientras se disminuía la distancia. Esta prueba se llevó a cabo
satisfactoriamente con comentarios positivos del sujeto respecto al sistema.
Página 60

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 34: Comportamiento del Filtro en el sujeto vidente 7
Sujeto 8
Este sujeto fue otro caso particular, debido a su alta prevención con los obstáculos que
producía un caminar mucho más lento que en otros sujetos. Continuando con las
particularidades, durante esta prueba el sensor no captó mucho ruido del entorno y en
ciertos intervalos de tiempo tuvo comportamientos similares al Filtro.
Ilustración 35: Comportamiento del Filtro en el sujeto vidente 8
Página 61
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Sujeto 9
El comportamiento presentado por el Filtro en este caso no fue diferente al de los
anteriores. Este sujeto no presentó prevención respecto a los obstáculos.
Ilustración 36: Comportamiento del Filtro en el sujeto vidente 9
Sujeto 10
El último sujeto se mostró confiado a la hora de utilizar el sistema, y al igual que el sujeto 7,
su reacción a los cambios en el entorno fue rápida. Este sujeto experimentó girar su cuerpo
ligeramente en ciertos tramos del segundo corredor, en el que el sensor captó una
considerable cantidad de ruido. El Filtro, nuevamente, presentó un comportamiento
esperado, suavizando los cambios drásticos y estabilizando las lecturas.
Página 62

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 37: Comportamiento del Filtro en el sujeto vidente 10
Consolidado de las Pruebas Videntes
Luego de la ejecución de cada prueba, se le pidió el favor a los sujetos de llenar la encuesta
basada en TAM. Los resultados al final de las dos franjas se explican a continuación.
Ilustración 38: Respuestas pregunta 1
En esta primera pregunta se ve una aceptación general de AKLAS para la realización de
tareas en el aspecto de movilidad en un espacio cerrado. El 60% de los sujetos de prueba
estuvo de acuerdo en que aún hacen falta mejorar algunos detalles del sistema como su
Página 63
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
tamaño y peso, pero que el funcionamiento es suficiente para suplir la necesidad de
moverse en espacios cerrados.
Ilustración 39: Respuestas pregunta 2
En esta segunda pregunta se evalúa que tan rápida es la respuesta del sistema a la hora de
moverse. De nuevo, el 60% de los sujetos de prueba estuvieron de acuerdo en que el
sistema tiene una buena respuesta ante el entorno, a pesar de que consideraron los rangos
muy cortos para generar las advertencias.
Ilustración 40: Respuestas pregunta 3
Página 64

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Esta pregunta fue orientada a la intención de conducta hacia el uso del sistema, en donde se
mostró que el 70% de los encuestados expresaron su satisfacción al dejar de preocuparse
por la movilidad en un espacio cerrado, ya que AKLAS les fue suficiente retroalimentación
del entorno para esto. Estos mismos expresaron que para hablar de productividad, hace
falta extender el sistema hacia los exteriores.
Ilustración 41: Respuestas pregunta 4
Para esta tercera pregunta, el 70% de los encuestados expresaron su conformidad con la
libertad que provee el sistema en su manipulación, ya que sus extremidades superiores se
encontraban libres para realizar una actividad cualquiera. Resaltaron que, en el estado en
que se encuentra el proyecto, es peligroso un eventual encuentro con unas escaleras.
Página 65
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 42: Respuestas pregunta 5
En esta quinta pregunta se ve que algunos de los sujetos no consideraron a AKLAS como un
obstáculo para vivir un día normal (40%), mientras que otros, a pesar de estar de acuerdo
con los primeros, señalaron la necesidad de mejorar la fuente de alimentación del módulo
de Arduino (60%), debido a que las pilas de 9V son reconocidas por su corta duración.
Ilustración 43: Respuestas pregunta 6
El 80% de los encuestados estuvo de acuerdo en que el sistema tiene una gran facilidad de
uso, ya que este solo consta de utilizar unos audífonos, vestir y encender el dispositivo, e
iniciar la aplicación de Android.
Página 66

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 44: Respuestas pregunta 7
El 70% de los sujetos de prueba expresaron el gusto por la interacción simple con el sistema,
destacando que solo se requiere ejecutar la aplicación para que esta comience a recoger
información del entorno y que no hay necesidad de acciones adicionales para su utilización.
Ilustración 45: Respuestas pregunta 8
En esta última pregunta los encuestados destacaron la baja curva de aprendizaje de este
sistema para ser dominado por completo. El 70% expresó sentirse a gusto con las
intervenciones del asistente de voz, bien sea por medio de vibraciones o mensajes de audio.
Página 67
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Adicional a las respuestas de la encuesta, se realizó un consolidado de gráficas de
comportamiento de todos los sujetos de prueba, teniendo en cuenta los datos del sensor y
los filtrados para dar una guía de cómo variaron los comportamientos de estos en los
mismos escenarios.
Ilustración 46: Consolidado de datos del sensor
Ilustración 47: Consolidado de datos filtrados
Página 68
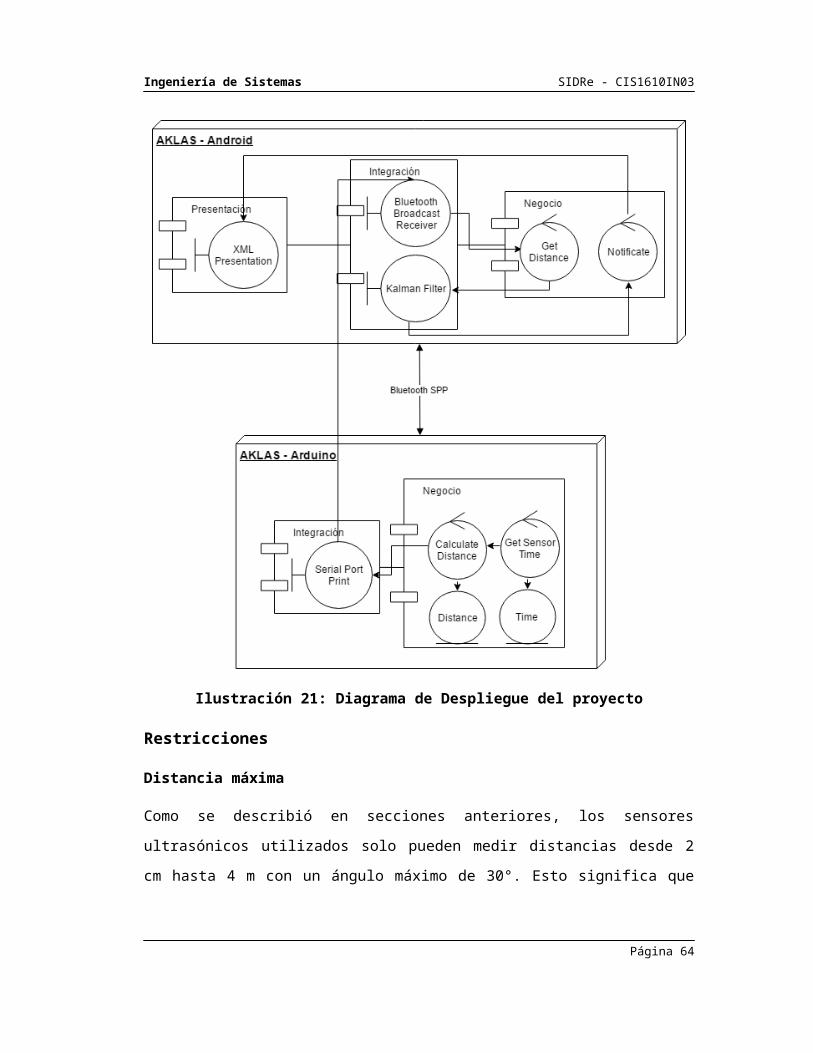
Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Pruebas Invidentes
Las pruebas con la población objetivo del proyecto se realizaron con una muestra de 6
personas entre los 20 y los 50 años de edad, de los cuales 2 poseen visión baja, mientras que
el resto son invidentes. Los sujetos de prueba atravesaron el ambiente creado de la forma
que fue explicada en la sección anterior. El horario en que fueron observados estos casos de
prueba corresponde a la franja de 1:30 pm a 3 pm del 31 de Mayo de 2016.
Nuevamente, para visualizar el comportamiento de los datos tomados contra los datos
filtrados, se utilizó la aplicación web Ubidots. Esto se encontraba en el módulo de Android,
donde se enviaron los datos que serían analizados posteriormente. En cada caso se
generaron dos gráficos, de la misma forma que en las pruebas con videntes.
Sujeto 1
El primer sujeto de prueba dio la pauta para descubrir que el vidrio no es buen reflector de
las ondas acústicas con frecuencias altas. El accionar del filtro fue evidente, ya que se
visualiza como suaviza los picos de ruido captados y estabiliza las medidas respecto a su
predicción. También, se notó que debido a la alta reverberación del sitio, el sonido afectó
armónicamente a las ondas emitidas por el sensor, introduciendo más ruido de lo esperado.
Ilustración 48: Comportamiento del Filtro en el sujeto invidente 1
Página 69
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Sujeto 2
Este sujeto tuvo la particularidad de que posee visión baja, es decir, ve montículos, por lo
que tuvo mayor retroalimentación que otros sujetos. Gracias a su seguridad al caminar, se
pudo ver una gran cantidad de ruido en las lecturas del sensor, y qué tan bien cumple el
Filtro con su tarea.
Ilustración 49: Comportamiento del Filtro en el sujeto invidente 2
Sujeto 3
Con este sujeto no se presentaron novedades respecto a los dos anteriores. Para esta
prueba se evidencia cómo el filtro se demora en aprender cuando hay una disminución de la
distancia captada por el sensor.
Página 70

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Ilustración 50: Comportamiento del Filtro en el sujeto invidente 3
Sujeto 4
La particularidad de este sujeto es que, tal como sucedió con el sujeto 2, posee visión baja.
Durante la prueba se pudo evidenciar mucho ruido en el ambiente, especialmente en las
frecuencias medias en el rango del audio. El filtro estabilizó las lecturas a medida que
pasaba el tiempo, mostrando su efectividad a pesar de iniciar su proceso con ruido.
Ilustración 51: Comportamiento del Filtro en el sujeto invidente 4
Página 71
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Sujeto 5
Este sujeto tuvo un obstáculo que se fue moviendo a un ritmo proporcional al caminar de
este. El comportamiento presentado por el Filtro en este caso no fue diferente al de los
anteriores.
Ilustración 52: Comportamiento del Filtro en el sujeto invidente 5
Sujeto 6
El último sujeto, al igual que el anterior, tuvo un obstáculo que se fue moviendo. A pesar de
la gran cantidad de ruido presente, el filtro se comportó de buena manera, no dejando pasar
aquellos picos innecesarios.
Ilustración 53: Comportamiento del Filtro en el sujeto invidente 6
Página 72

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Consolidado General de las Pruebas
Al igual que en las pruebas con personas videntes, se le pidió el favor a los sujetos de llenar
la encuesta basada en TAM. Para estos resultados existen dos valores importantes: un
puntaje obtenido de las respuestas a preguntas de un área específica, y un valor esperado
que sirve como estimación de los puntajes, el cual fue calculado como la media de las
posibles respuestas de una pregunta multiplicado por la cantidad de preguntas del área y el
tamaño de la muestra. Los resultados de ambas pruebas se exponen a continuación.
Utilidad Percibida
Se puede evidenciar que esta área tiene puntajes altos, hecho que da a entender que los
sujetos de prueba vieron una alta utilidad del proyecto para resolver el problema planteado
en la Descripción General.
Ilustración 54: Resultados TAM sobre Utilidad Percibida
Facilidad de Uso Percibida
Uno de los aspectos más destacados del proyecto es su comodidad y facilidad para ser
dominado. En especial, las personas invidentes destacaron que para ellos es fácil portar el
sensor en el cinturón y llevar el celular con auriculares, de los cuales solo es necesario
colocar uno.
Página 73
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Ilustración 55: Resultados TAM sobre Facilidad de Uso Percibida
Actitud hacia el Uso
En esta área, se evaluó cómo se siente el usuario cuando usa el sistema. En estos resultados
se muestra el agrado por usar el dispositivo, ya que este les libera las manos para realizar
cualquier otra actividad que deseen.
Ilustración 56: Resultados TAM sobre Actitud hacia el Uso
Página 74

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Intención de Conducta de Uso
Para la última área de TAM, se evaluó el comportamiento de los sujetos de prueba al utilizar
el sistema. Los resultados positivos son consecuencia del proceder de los usuarios al tener
contacto con el sistema, los cuales se imaginaron un día de su cotidianidad al probar el
dispositivo y hacer caso a las alarmas generadas.
Ilustración 57: Resultados TAM sobre Intención de Conducta de Uso
7. Análisis de Impacto
AKLAS, desde la perspectiva de los sujetos de prueba y de aquellos que han conocido el
proyecto, es un sistema que implica una mejora significativa en la calidad de vida de las
personas invidentes, no solo por su innovador concepto de liberar a las personas con
discapacidad visual del uso del bastón, sino por su interacción sencilla y su fácil dominio. El
presente Trabajo de Grado pretende que, a partir de este proyecto, se generen más
tecnologías que busquen ayudar a personas con diferentes discapacidades, dando solución a
los problemas reales de esta población en el mundo.
Se resalta que este proyecto puede llegar a convertirse en un producto comercial altamente
aceptado por las personas invidentes, tal como sucede con los implantes cocleares y las
Página 75
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
personas con discapacidad auditiva. También, se enfatiza la posibilidad de realizar un fuerte
trabajo en conjunto con fundaciones para que la población invidente del país conozca los
beneficios de este proyecto y este pueda mejorar en pro de ellos.
Este sistema es uno de los pocos trabajos de grado que buscan ayudar a las personas con
discapacidad visual, integrando conocimientos de electrónica básica, acústica, probabilidad,
ingeniería de software y análisis de algoritmos. Esto sirve como motivación para los
estudiantes de carreras relacionadas con tecnologías de información, los invita a que
orienten sus conocimientos al servicio de personas a las que se les puede mejorar su calidad
de vida.
8. Conclusiones
Se concluye que este proyecto investigación fue todo un éxito, debido a que se creó una
nueva tecnología basada en el principio de Ecolicalización funcional, útil y con mucho
potencial para ayudar a personas invidentes. Esta tecnología posee dos módulos: un
prototipo de dispositivo ultrasónico basado en Arduino y una aplicación de Android que
utiliza el Filtro de Kalman. La concordancia de los requerimientos con las necesidades de las
personas invidentes se evidencia en su utilidad, su facilidad de uso y que tanto se motiva el
uso de este sistema a través de sus buenos resultados.
Hubo un aprendizaje enorme en cuanto a la aceptación de nuevas tecnologías, donde se
muestra una perspectiva clara de cómo el usuario ve las innovaciones tecnológicas y como
estas deben ser hechas a su medida. El TAM enseña a concretar estas ideas en dos áreas
básicas, de las cuales se pueden derivar muchas más, teniendo en cuenta que tan grande y
complejo es el sistema a desarrollar.
Como trabajo futuro, se busca integrar de forma exitosa el segundo sensor ultrasónico,
orientado a detectar cambios en el suelo, y más sensores que puedan dar información útil
del entorno para mejorar el modelo, tal como un acelerómetro o un termómetro. También,
Página 76

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
se plantea crear un modelo de negocio para que este proyecto se convierta en un producto
comercial reconocido. Para esto es necesario concretar la idea del circuito impreso y el
diseño de una caja de menores dimensiones a la utilizada en la validación del proyecto.
Página 77
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
IV- REFERENCIAS Y BIBLIOGRAFÍA
[1] I. Lengua, L. Dunai, G. Peris Fajarnes y B. Defez, «Dispositivo de Navegación para Personas Invidentes Basado en la Tecnología Time Of Flight,» Dyna, Valencia, 2013.
[2] J. H. Cortes Valencia, L. A. Castaño Acosta y W. H. Morales Aristizabal, «Prototipo experimental de un sistema de detección de objetos por medio de imagenes y sensores para invidentes (DOMIS),» Universidad Tecnológica de Pereira, Pereira, 2010.
[3] S. Bellin, «Blindness: Mapping the Invisible,» 2011.
[4] J. L. Busaniche, «El Lazarillo de Ciegos Caminantes,» El Cid Editor, 2009.
[5] C. J. Baker, «Biomimetic Echolocation with Application to Radar and Sonar Sensing,» IEEE, 2014.
[6] World Health Organization, «Visual Impairment and Blindness,» Agosto 2014. [En línea]. Available: http://www.who.int/mediacentre/factsheets/fs282/en/. [Último acceso: 25 03 2015].
[7] J. C. Gómez Beltrán, «Diagnóstico "Discapacidad en Colombia: Retos para la inclusión en Capital Humano",» Abril 2010. [En línea]. Available: http://www.discapacidadcolombia.com/modules.php?name=Content&pa=showpage&pid=210. [Último acceso: 25 03 2015].
[8] M. D. Binder, N. Hirokawa y U. Windhorst, Encyclopedia of Neuroscience, Berlin: Springer Berlin Heidelberg, 2009.
[9] I. Abdul Aziz, S. Mahamad, M. Mehat y N. Samiha, «Blind Echolocation Using Ultrasonic Sensors,» IEEE, 2008.
[10] D. Kish, «Human echolocation: How to “see” like a bat,» NewScientist, 2009.
Página 78

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
[11] I. Jacobson, «The Essential Unified Process – An introduction,» 2008. [En línea]. Available: http://classic-web.archive.org/web/20080331082508/http://www.ivarjacobson.com/products/essup.cfm. [Último acceso: 18 04 2015].
[12] D. West, «THE ESSENTIAL UNIFIED PROCESS (ESSUP) - NEW LIFE FOR THE UNIFIED PROCESS,» 2006. [En línea]. Available: http://www.ivarjacobson.com/resource.aspx?id=430. [Último acceso: 18 04 2015].
[13] Rational Software Corporation, «Rational Unified Process - Best Practices for Software Development Teams,» 1998.
[14] CHIRr, «Technology Acceptance Model (Perceived Usefulness and Perceived Ease of Use),» [En línea]. Available: http://chirr.nlm.nih.gov/tam.php. [Último acceso: 24 05 2015].
[15] Bat Conservation Trust, «Echolocation,» [En línea]. Available: http://www.bats.org.uk/pages/echolocation.html. [Último acceso: 14 05 2015].
[16] A. C. Isbert, Diseño acústico de espacios arquitectónicos, Barcelona: UPC, 1998.
[17] Universidad del País Vasco, «Acústica de interiores,» 2003. [En línea]. Available: http://www.ehu.eus/acustica/espanol/salas/acines/acines.html. [Último acceso: 18 05 2015].
[18] Arduino, «What Is Arduino?,» 2015. [En línea]. Available: http://arduino.cc/en/guide/introduction. [Último acceso: 08 04 2015].
[19] A. Sharma, «Learn the Working of Ultrasonic Sensors,» [En línea]. Available: http://www.engineersgarage.com/insight/how-ultrasonic-sensors-work. [Último acceso: 18 05 2015].
[20] Bluetooth Special Interest Group, «A Look at the Basics of Bluetooth Technology,» 2015. [En línea]. Available: http://www.bluetooth.com/Pages/Basics.aspx. [Último acceso: 18 05 2015].
Página 79
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
[21] S. Hoefer, «Meet The Tacit Project. It’s Sonar For The Blind.,» Grathio Labs, 08 08 2011. [En línea]. Available: Meet The Tacit Project. It’s Sonar For The Blind.. [Último acceso: 18 05 2015].
[22] UltraCane, «The UltraCane - an award winning mobility aid,» [En línea]. Available: http://www.ultracane.com/about_the_ultracane. [Último acceso: 21 05 2015].
[23] M. D. Mosquera, «Proyectos que nacen para servir,» Vía U, nº 22, p. 57, 2015.
[24] A. P. Ortiz Pulido y J. S. Corredor Merchán, «Uso de teléfonos inteligentes para ayudar a personas con discapacidad visual a localizarse dentro de un espacio cerrado,» 18 11 2013. [En línea]. Available: http://pegasus.javeriana.edu.co/~CIS1430SD03. [Último acceso: 18 05 2015].
[25] I.A.P., Escuela para Entrenamiento de Perros Guía para Ciegos, «¿Cómo se entrenan los perros guía?,» 06 01 2016. [En línea]. Available: http://www.perrosguia.org.mx/#!comoseentrenan/c1bwo. [Último acceso: 25 01 2016].
[26] Fundación Colombiana para el Perro Guía Vishnú del Cyprés, «Etapas de Adiestramiento,» [En línea]. Available: http://www.escuelaperrosguia.com/index.htm. [Último acceso: 25 01 2016].
[27] Arduino, «Arduino Pro Mini,» 2015. [En línea]. Available: http://arduino.cc/en/Main/arduinoBoardProMini. [Último acceso: 09 04 2015].
[28] smartGSM, «Samsung Galaxy S4 Mini,» [En línea]. Available: http://www.smart-gsm.com/moviles/samsung-galaxy-s4-mini. [Último acceso: 09 04 2015].
[29] Elecfreaks, «Ultrasonic Ranging Module HC - SR04,» [En línea]. Available: http://www.micropik.com/PDF/HCSR04.pdf. [Último acceso: 11 02 2016].
[30] RCS Components, «HC Serial Bluetooth Products,» [En línea]. Available: https://www.rcscomponents.kiev.ua/datasheets/hc_hc-05-user-instructions-bluetooth.pdf. [Último acceso: 11 02 2016].
[31] Luis - IngenieríaElectrónica.org, «Definición de Protoboard y como utilizarlo,» 08 08
Página 80

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
2015. [En línea]. Available: http://ingenieriaelectronica.org/definicion-de-protoboard-y-como-utilizarlo/. [Último acceso: 12 02 2016].
[32] Sparkfun, «PCB Basics,» [En línea]. Available: https://learn.sparkfun.com/tutorials/pcb-basics. [Último acceso: 18 02 2016].
[33] Arduino, «Arduino Nano,» 2016. [En línea]. Available: https://www.arduino.cc/en/Main/ArduinoBoardNano. [Último acceso: 11 02 2016].
[34] I. Aihara, E. Fujioka y S. Hiryu, «Qualitative and Quantitative Analyses of the Echolocation Strategies of Bats on the Basis of Mathematical Modelling and Laboratory Experiments,» 05 07 2013. [En línea]. Available: http://journals.plos.org/plosone/article?id=10.1371/journal.pone.0068635. [Último acceso: 27 04 2016].
[35] L. Kleeman, «Understanding and Applying Kalman Filtering,» [En línea]. Available: http://biorobotics.ri.cmu.edu/papers/sbp_papers/integrated3/kleeman_kalman_basics.pdf. [Último acceso: 29 04 2016].
[36] T. Babb, «How a Kalman filter works, in pictures,» Bzarg, 08 11 2015. [En línea]. Available: http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/. [Último acceso: 30 04 2014].
[37] Google, «Android NDK,» [En línea]. Available: https://developer.android.com/ndk/index.html. [Último acceso: 10 05 2016].
[38] Oracle, «Java Native Interface,» [En línea]. Available: http://docs.oracle.com/javase/7/docs/technotes/guides/jni/. [Último acceso: 10 05 2016].
[39] M. Bluejay, «Battery Guide,» [En línea]. Available: http://michaelbluejay.com/batteries/. [Último acceso: 01 03 2016].
[40] Sparkfun, «Serial Communication,» [En línea]. Available: https://learn.sparkfun.com/tutorials/serial-communication. [Último acceso: 29 02 2016].
Página 81
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
[41] Sparkfun, «Bluetooth Basics,» [En línea]. Available: https://learn.sparkfun.com/tutorials/bluetooth-basics. [Último acceso: 09 02 2016].
[42] Bluetooth Special Interest Group, «Serial Port Profile (SPP),» [En línea]. Available: https://developer.bluetooth.org/TechnologyOverview/Pages/SPP.aspx. [Último acceso: 29 02 2016].
[43] Google, «Android, the world's most popular mobile platform,» [En línea]. Available: http://developer.android.com/about/index.html. [Último acceso: 24 05 2015].
[44] M. Bolton, «What is Android? A beginner's guide,» TechRadar, 06 07 2011. [En línea]. Available: http://www.techradar.com/news/phone-and-communications/mobile-phones/what-is-android-a-beginner-s-guide-975482. [Último acceso: 29 02 2016].
[45] IEEE, IEEE Guide for Software Requirements Specifications, New York: IEEE, 1984.
[46] V. Venkatesh y H. Bala, «Technology Acceptance Model 3 and a Research Agenda on Interventions,» 04 2008. [En línea]. Available: http://www.vvenkatesh.com/Downloads/Papers/fulltext/pdf/Venkatesh_Bala_DS_2008.pdf. [Último acceso: 29 02 2016].
[47] Real Academia Española, «Ultrasonido,» [En línea]. Available: http://lema.rae.es/drae/?val=ultrasonido. [Último acceso: 24 05 2015].
Página 82

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
IV - ANEXOS
Anexo 1. Glosario
Ultrasonido: Sonido cuya frecuencia es superior al límite perceptible por el oído humano (20
KHz). Tiene muchas aplicaciones industriales y se emplea en medicina [47].
Ecolocalización: Sistema sensorial encontrado en murciélagos, y ballenas dentadas, en el
que se emiten sonidos de alta frecuencia y sus ecos son interpretados para determinar la
dirección, distancia y forma de los objetos [8].
Filtro de Kalman: Método recursivo de estimación óptima. Este infiere parámetros de
interés de observaciones inciertas e inexactas, y procesa nuevos datos a medida que
ingresan al sistema, siempre y cuando las variables sean aleatorias y tengan una distribución
Gaussiana [35].
Distribución Gaussiana: Distribución continua de probabilidad, importante en estadística y
aplicada a ciencias sociales y naturales para representar variables aleatorias con valores
reales para las que no se conoce una distribución.
Arduino: Microcontrolador utilizado para crear pequeños computadores que pueden sentir
y controlar el mundo físico más allá que un computador común. Esta plataforma es open
source y consta de una placa programable o microcontrolador y un ambiente de desarrollo
de software exclusivo para esta
Android: Sistema operativo creado por Google, se encuentra en cientos de millones de
dispositivos móviles en más de 190 países en el mundo [43].
Página 83
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008

Ingeniería de Sistemas SIDRe - CIS1610IN03
Android NDK: Herramienta que permite implementar partes de una aplicación de Android
usando lenguajes de código nativo como C o C++. [37]
Java Native Interface (JNI): Interfaz estándar de programación que permite escribir
métodos nativos en Java y embeber la máquina virtual de Java en aplicaciones nativas [38].
Bluetooth: Tecnología de comunicaciones inalámbrica que se encuentra en una gran
cantidad de dispositivos, desde celulares y computadores hasta equipos médicos. Esta
trabaja en la banda ISM (industrial, científica y médica) entre 2.4 GHz y 2.485GHz [20].
Absorción: Reducción de energía asociada a las ondas sonoras al chocar contra una
superficie [16].
Reflexión (Reverberación): Energía de una onda sonora que regresa al no ser absorbida por
una superficie [16].
Difusión: Conservación de energía de las ondas sonoras y su propagación en el aire [16].
TAM (Technology Acceptance Model): Modelo utilizado para estudiar la aceptación de una
cierta tecnología de un individuo, teniendo en cuenta la facilidad de uso de esta y su utilidad
[14].
Anexo 2. Especificación de Requerimientos (SRS) y Casos de UsoEn el siguiente enlace podrá encontrar un documento que contiene la especificación de
Requerimientos del proyecto, la descripción de los mismos y la descripción de los Casos de
Uso correspondientes.
Especificación de Requerimientos de Software
Descripción de Requerimientos del proyecto
Descripción de Casos de Uso del proyecto
Página 84

Pontificia Universidad Javeriana Memoria de Trabajo de Grado - Investigación
Si el anterior enlace no funciona, es posible encontrar este y los otros anexos del presente
Trabajo de Grado en su página oficial, en la sección de documentos.
http://pegasus.javeriana.edu.co/~CIS1610IN03/
Anexo 3. Descripción Matemática del Algoritmo (Filtro de Kalman)En el siguiente enlace podrá encontrar un documento que contiene el desarrollo
matemático del algoritmo propuesto para solucionar el problema abordado.
Descripción Matemática del Algoritmo
Si el anterior enlace no funciona, es posible encontrar este y los otros anexos del presente
Trabajo de Grado en su página oficial, en la sección de documentos.
http://pegasus.javeriana.edu.co/~CIS1610IN03/
Anexo 4. Formato de Encuesta basado en TAMEn el siguiente enlace podrá encontrar la encuesta basada en las 2 áreas básicas del
Technology Acceptance Model y 2 áreas derivadas del mismo.
Formato de encuesta de satisfacción de AKLAS basado en las áreas principales del TAM
Si el anterior enlace no funciona, es posible encontrar este y los otros anexos del presente
Trabajo de Grado en su página oficial, en la sección de documentos.
http://pegasus.javeriana.edu.co/~CIS1610IN03/
Página 85
Preparado por el Grupo Investigación Istar- Versión 1.01 – 12/03/2008