Projective Geometry for Computer Vision - romano/talks/scs_05_12_04/scs_05_12_04.pdf · Projective...
45
Projective Geometry for Computer Vision Raquel A. Romano MIT Artificial Intelligence Laboratory [email protected] Scientific Computing Seminar May 12 , 2004 Projective Geometry for Computer Vision Raquel A. Romano 1
Transcript of Projective Geometry for Computer Vision - romano/talks/scs_05_12_04/scs_05_12_04.pdf · Projective...

Projective Geometryfor Computer Vision
Raquel A. RomanoMIT Artificial Intelligence Laboratory
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano1

3D Computer VisionClassical Problem:
Given a collection of 2D images,build a model of the 3D world.
Example Applications:•virtual/immersive environments•robotics & autonomous vehicles•minimally invasive surgery
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano2

Outline
1. Projective Geometry Overview2. Minimal Projective Parameters3. Projective Parameter Estimation4. Motion Boundary Detection5. Conclusion
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano3

Image Formation
3D scene imaging 2D images
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano4

Computer Vision
3D scene model data 2D images
analysis measurement
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano5

scene point
optical center
image point
optical ray
optical axis
Camera Geometry:Single View
pinhole model of perspective projection
ZYy
ZXx ==
unknown depth at each point
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡→⎥
⎦
⎤⎢⎣
⎡
y
x
y
x
cc
yx
fsf
yx
1unknown internal
camera parameters
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano6

Camera Geometry:Multiple Views
unknown rotations and translations
jkjk TR
ijij TR
ikik TR
jx
kxix
X
TR +⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ZYX
ZYX
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano7

Measured Data:Image Points and Lines
geometric constraint: optical rays intersect in 3Dprojective geometry: express constraint in terms of
measured 2D image featuresScientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano8

Projective Camera Model
• linear model of image formation
• depth-independent expression for optical ray intersections
• multilinear relations among point and line matches
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano9

Bilinear Constraints(Longuet-Higgins ,1981, Faugeras, 1992; Hartley, 1992)
iixX λ=
[ ] XTRAx ≅ jxijT
ixijR
XiA jA
ijijj ij TxRx += ιλλ
[ ] 0=iijTj ijxRTx x
jjj
iii
xAx
xAx1
1
−
−
→
→
0=iijTj xFx
[ ] 01 =−−i
ij
iijT
jTj ij x
F
ARTAx44 344 21 x fundamental matrix
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano10

Fundamental MatrixMaps a point in one image to a line in the
other image that contains its match
jx
kxix ijF kjF
Given matching points in two views, predict the matching point in a third image.
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano11

Projective Models in Practice• View synthesis and interpolation: point transfer
function for dense point correspondences
• Self-calibration: automatic recovery of internal camera parameters from fundamental matrices
• Bundle adjustment initialization: initial rotation and translation for nonlinear Euclidean optimization
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano12

Outline
1. Projective Geometry Overview2. Minimal Projective Parameters3. Projective Parameter Estimation4. Motion Boundary Detection5. Conclusion
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano13

Practical Problem
• Few point matches between some views.
• Unstable for estimating geometric relationships.
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano14

Geometric Consistency
Pairwise geometric relations may be inconsistent.
?
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano15

Goals• Impose algebraic
geometric constraints on stationary points seen in arbitrarily many views.
• Avoid estimating too many parameters: depths, rotations, translations
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano16

Geometric Dependencies
ijFijF
ijF
ijF
ijFijF
ijFijF
• Pairwise projective geometric relations are interdependent.
• Approach: define projective dependencies and restrict solutions to be globally consistent
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano17

Projective Bilinear Parameters
ix jx
0=iijTj xFx
X
[ ] 1−−= iijijT
jij ARTAFx
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano18

Projective Bilinear Parameters
ijhije jie
ix jx
0=iijTj xFx epipoles
jiij ee
ijhepipolar collineation
[ ] [ ] [ ]xx ijT
i
Ti
ijjjjiij ep
qhqpeF ⎥
⎦
⎤⎢⎣
⎡
−≅
(Csurka, et.al., 1997)
imaged 3Dtranslation & rotation
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano19

Projective Parameters
ijjiij hee ,,ijjiij hee ,,
ijjiij hee ,,
ijjiij hee ,,
ijjiij hee ,,
ijjiij hee ,,
ijjiij hee ,,
ijjiij hee ,,
• provide a complete projective model of camera configuration
But...• set of all pairwise
parameters are still redundant
• not all images have sufficient overlap
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano20

Trifocal Dependencies• derive dependencies among
three fundamental matrices
• correctly models degreesof freedom in camera configuration
• geometrically consistent parameterized model of view triplets
kie kje
ike
ije jie jke
kih kjh
ijh
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano21

Trifocal Dependencies
trifocal lines available from two fundamental matrices
• derive dependencies among three fundamental matrices
• correctly models degreesof freedom in camera configuration
• geometrically consistent parameterized model of view triplets
ktkie kje
it jtike
ije jie jke
kih kjh
ijh
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano22

Outline
1. Projective Geometry Overview2. Minimal Projective Parameters3. Projective Parameter Estimation4. Motion Boundary Detection5. Conclusion
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano23

Recovering Camera Geometryview i view jview k
fewcorrespondences
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano24

Linear Initialization8-point Algorithm
(Hartley, 1995)
( )( ){ }∑
ji
iijTj
xxxFx
,
Minimize over all matching point pairs.
[ ]Tij fffffffff 333231232221131211=f
Rewrite bilinear constraints as
where
and solve linear system
0Af =ij
[ ] 0f =ijjjjjijijjiji yxyyyyxxxyxx 1
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano25

Projection to Parameter Space
Map linear estimate of fundamental matrix to projective parameter space:
},,{7 ijjiijij heep =→ijF },,{4 ijji
ij hγγp =→
• parameterization requires choice of projective basis
• basis affects shape of error surface for nonlinear optimization
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano26

Geometric Objective Functionpoint-to-epipolar-line distance ~ image reprojection error
weighted residual of bilinear constraint
iTjij
ijji ijwE xFxpxx
p7);,( 7 =
22
21
22
21 )()(
1)()(
1
jT
jT
iijiijij
ijij
wxFxFxFxF +
++
=
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano27

Error Surface Depends on Basiscanonical basis geometrically defined basis
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano28
gamma(i,j) (h1,h2)
(h1,h2) (h2,h3) (h1,h3)
(e1,e2) (e3,e4)
gamma(i,j) (h1,h2)
(e1,e2) (e3,e4)
(h1,h2) (h2,h3) (h1,h3)

Nonlinear Trifocal Estimationi jk
1. Initialize epipolar geometry• 8-point algorithm: linear solution to fundamental
matrix for all view pairs• extract epipoles and epipolar collineations
2. 7D nonlinear minimization: bifocal parameters for view pairs (i,k) (j,k)
3. Trifocally constrained estimation for view pair (i,j)• compute trifocal lines• project parameters to trifocally constrained space• 4D nonlinear minimization for bifocal parameters
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano29
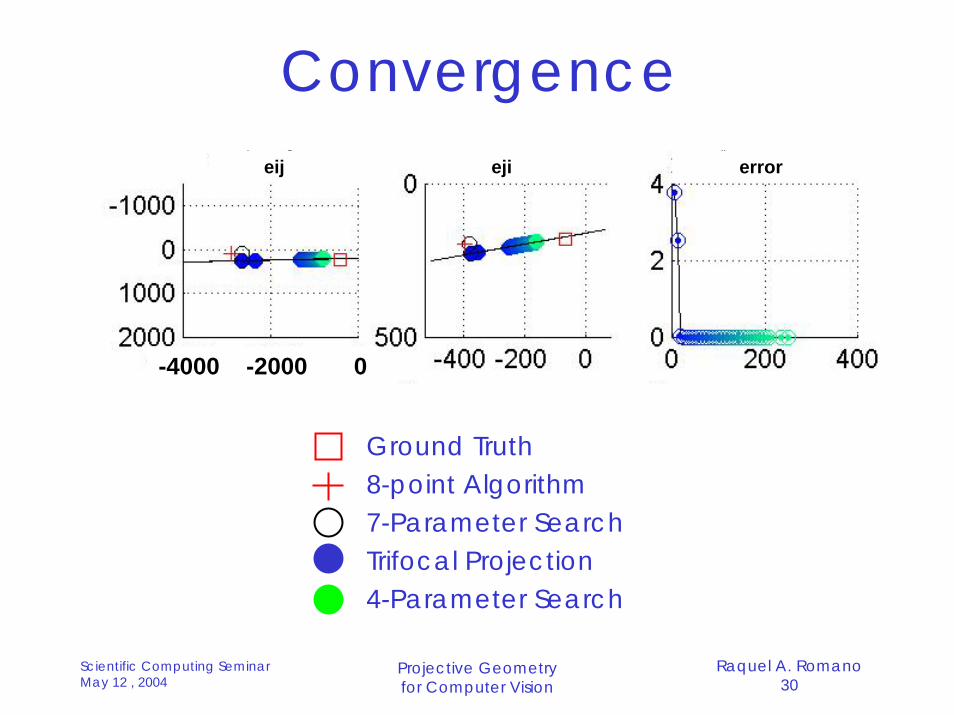
Convergenceeij erroreji
-4000 -2000 0
Ground Truth8-point Algorithm7-Parameter SearchTrifocal Projection4-Parameter Search
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano30

Ground Truth8-Point Algorithm
7-Parameter Algorithm
4-Parameter Algorithm
Results
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano31

knossos sequenceview i view k view j
fewcorrespondences
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano32
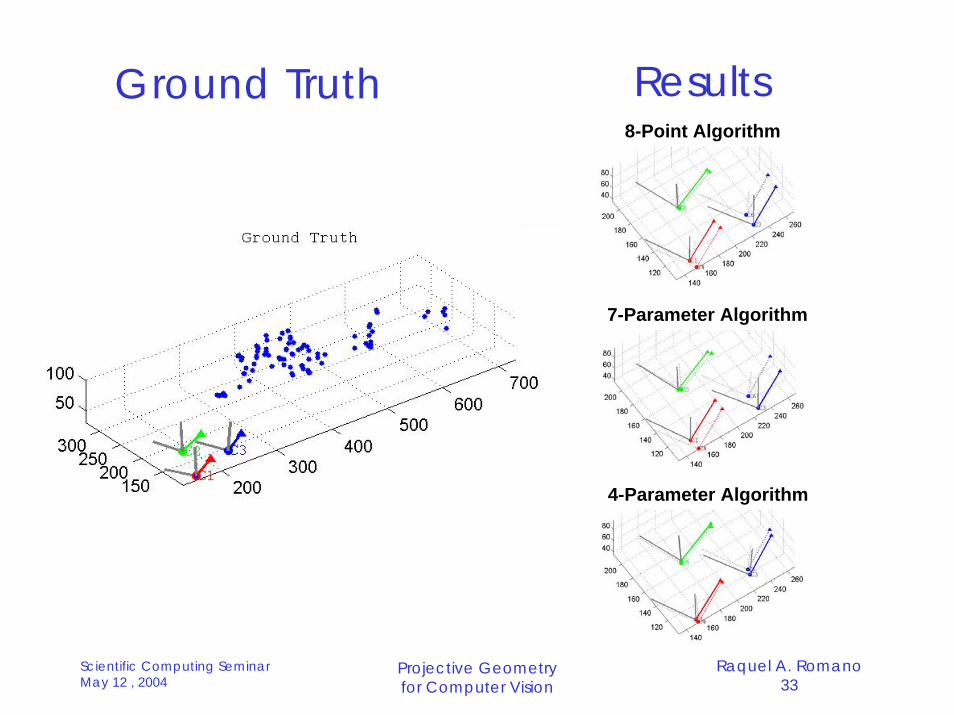
Ground Truth
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano33
4-Parameter Algorithm
7-Parameter Algorithm
8-Point Algorithm
Results

Summary
• Imposing projective constraints on camera geometry corrects the estimation of epipolar geometry
• Resulting camera configuration for multiple cameras is globally consistent
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano34
Outline
1. Projective Geometry Overview2. Minimal Projective Parameters 3. Projective Parameter Estimation4. Motion Boundary Detection5. Conclusion
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano35

Camera and Scene Motion
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano36

Combining Intensity and Geometrytrifocal tensor
projective linear form relating a point-line-line(Spetsakis & Aloimonos, 1990; Shashua, 1994)
0),,( =kjiΤ llxScientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano37

Tensor Brightness Constraint(Shashua & Hannah, 1995; Shashua & Stein, 1997)
• Horn-Schunk brightness constraint is linear in point coordinates
• Defines line in each image containing matching point
• Spatiotemporal gradient at every pixel provides test of rigid motion
u Ix + v Iy + It = 0
ax + by + c = 0
(a,b,c)T ≅Ix
⎥⎦
⎤⎢⎣
⎡Iy
It - x0 Ix – y0 Iy
u = x - x0 v = y - y0
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano38

Motion Boundary Detection
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano39
• Partition image into windows and solve for trifocal tensor coefficients.
• Sum residual error of tensor solution.
• Only regions with rigid 3D motion have a good fit.
• High residuals indicate regions that cross a motion boundary.

Multiple Frame Flow
• Multi-frame tracks fall into separable classes
• Track points over many frames
• Robustly fit tracks to linear approximation of instantaneous planar motion
x(t) = x0+ t [Ax0 + b]
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano40

Detecting Independent Motions
Residual error of estimated motion model on all point tracks
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano41

Complexity of Motion Model
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano42

ConclusionsWhen possible, use domain and task
knowledge to choose model:• What type of information is needed• What aspects of the imaging conditions
are known or controlled• What types of uncertainty can be
modeled and compensated for
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano43

Future NeedsRole of learning in motion analysis:
• Supervised learning of geometric motion classes
• Data-driven model selection by flow classification
• Robust estimation of appropriate motion model
• Adaptive, time-varying estimation
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano44

END
Scientific Computing SeminarMay 12 , 2004
Projective Geometryfor Computer Vision
Raquel A. Romano45