Practical multiagent rendezvous through modified circumcenter algorithms
8
Automatica 45 (2009) 2010–2017 Contents lists available at ScienceDirect Automatica journal homepage: www.elsevier.com/locate/automatica Practical multiagent rendezvous through modified circumcenter algorithms ✩ Sonia Martínez * Mechanical and Aerospace Engineering Department, University of California at San Diego, 9500 Gilman Dr, La Jolla, CA, 92093-0411, USA article info Article history: Received 9 November 2007 Received in revised form 5 March 2009 Accepted 13 May 2009 Available online 4 July 2009 Keywords: Multiagent systems Mobile robots Motion coordination Rendezvous algorithm Autonomous vehicles abstract We present a class of modified circumcenter algorithms that allow a group of agents to achieve ‘‘practical rendezvous’’ when they are only able to take noisy measurements of their neighbors. Assuming a uniform detection probability in a disk of radius σ about each neighbor’s true position, we show how initially connected agents converge to a practical stability ball. More precisely, a deterministic analysis allows us to guarantee convergence to such a ball under r -disk graph connectivity in 1D under the condition that r /σ be sufficiently large. A stochastic analysis leads to a similar convergence result in probability, but for any r /σ > 1, and under a sequence of switching graphs that contains a connected graph within bounded time intervals. We include several simulations to discuss the performance of the proposed algorithms. © 2009 Elsevier Ltd. All rights reserved. 1. Introduction The topic of distributed algorithms for robotic networks is at- tracting intense research activity in recent years; see e.g., Kumar, Leonard and Morse (2004). As a consequence of this, a wealth of algorithms are being proposed together with novel analysis tools to evaluate their performance. Clearly, an important aspect to consider is that of robustness to measurement and communica- tion disturbance. If possible, a characterization of what typical de- graded behaviors are, and how these are affected by the network size should be provided. When the characterized behavior is not satisfactory, the performed analysis may help find an alternative solution. Motivated by this, we discuss how the nonlinear Circumcenter Algorithm, see Ando, Oasa, Suzuki, and Yamashita (1999), can be made robust with respect to measurement noise. This complements the work in Ando et al. (1999), which observed good performance of the algorithm in simulation, and the work in Cortés, Martínez, and Bullo (2006), Flocchini, Prencipe, Santoro, and Widmayer (2001) and Lin, Morse, and Anderson (2007a), which respectively considered asynchronous versions of the algorithm, and proved convergence under sequences of switching graphs. Other related papers include Kingston, Ren, ✩ The material in this paper was partially presented at 46th IEEE International Conference on Decision and Control, New Orleans, December 2007. This paper was recommended for publication in revised form by Associate Editor Zhihua Qu under the direction of Editor Andrew R. Teel. * Tel.: +1 858 822 4243; fax: +1 858 534 4387. E-mail address: [email protected]. and Beard (2005), Schenato and Zampieri (2006) and Xiao, Boyd, and Kim (2007), which study how consensus algorithms are robust to communication, measurement noise and quantization errors. However, the type of algorithms considered in these works are linear, while the Circumcenter Algorithm is nonlinear and agents’ motion is constrained. For simplicity, we consider here first-order dynamics for each agent. Rendezvous algorithms for nonholonomic vehicles has been studied in; e.g., Dimarogonas and Kyriakopoulos (2007). The contributions of this paper can be summarized as follows. First, we propose an alternative to the standard Circumcenter Algorithm. The alternative algorithm, which has been termed as the ‘‘1/2 Circumcenter Algorithm’’, does not require either of the following: (i) the explicit computation of constraint sets so agents maintain connectivity with others within distance r > 0, and (ii) knowledge of the absolute positions of neighbors. Second, we propose two possible modifications of the standard Circumcenter Algorithm and the new 1/2 Circumcenter Algorithm to deal with noisy measurements. The assumption is that every measured neighbor’s position belongs to a disk centered at the neighbor’s true position and radius σ< r . This noise can make agents lose connectivity when they implement the standard or the 1/2 Circumcenter Algorithms. The two proposed modifications of each algorithm guarantee agent connectivity. The first one restricts further each agent’s motion constraint set to guarantee connectivity of the network (variant 1). In the second one, agents filter measurements of neighbors to make sure that they are still within the connectivity radius r (variant 2). After this, we look at all variants of the modified circumcenter algorithms in 1D and analyze them using a deterministic approach. Being the proofs analogous, we present a detailed account of the modified (standard) Circumcenter Algorithm, variant 1. All 0005-1098/$ – see front matter © 2009 Elsevier Ltd. All rights reserved. doi:10.1016/j.automatica.2009.05.013
-
Upload
sonia-martinez -
Category
Documents
-
view
212 -
download
0
Transcript of Practical multiagent rendezvous through modified circumcenter algorithms

Automatica 45 (2009) 2010–2017
Contents lists available at ScienceDirect
Automatica
journal homepage: www.elsevier.com/locate/automatica
Practical multiagent rendezvous through modified circumcenter algorithmsI
Sonia Martínez ∗Mechanical and Aerospace Engineering Department, University of California at San Diego, 9500 Gilman Dr, La Jolla, CA, 92093-0411, USA
a r t i c l e i n f o
Article history:Received 9 November 2007Received in revised form5 March 2009Accepted 13 May 2009Available online 4 July 2009
Keywords:Multiagent systemsMobile robotsMotion coordinationRendezvous algorithmAutonomous vehicles
a b s t r a c t
We present a class of modified circumcenter algorithms that allow a group of agents to achieve ‘‘practicalrendezvous’’ when they are only able to take noisymeasurements of their neighbors. Assuming a uniformdetection probability in a disk of radius σ about each neighbor’s true position, we show how initiallyconnected agents converge to a practical stability ball. More precisely, a deterministic analysis allows usto guarantee convergence to such a ball under r-disk graph connectivity in 1D under the condition thatr/σ be sufficiently large. A stochastic analysis leads to a similar convergence result in probability, but forany r/σ > 1, and under a sequence of switching graphs that contains a connected graph within boundedtime intervals. We include several simulations to discuss the performance of the proposed algorithms.
© 2009 Elsevier Ltd. All rights reserved.
1. Introduction
The topic of distributed algorithms for robotic networks is at-tracting intense research activity in recent years; see e.g., Kumar,Leonard and Morse (2004). As a consequence of this, a wealthof algorithms are being proposed together with novel analysistools to evaluate their performance. Clearly, an important aspectto consider is that of robustness to measurement and communica-tion disturbance. If possible, a characterization of what typical de-graded behaviors are, and how these are affected by the networksize should be provided. When the characterized behavior is notsatisfactory, the performed analysis may help find an alternativesolution.Motivated by this, we discuss how the nonlinear Circumcenter
Algorithm, see Ando, Oasa, Suzuki, and Yamashita (1999), canbe made robust with respect to measurement noise. Thiscomplements the work in Ando et al. (1999), which observedgood performance of the algorithm in simulation, and thework in Cortés, Martínez, and Bullo (2006), Flocchini, Prencipe,Santoro, and Widmayer (2001) and Lin, Morse, and Anderson(2007a), which respectively considered asynchronous versionsof the algorithm, and proved convergence under sequences ofswitching graphs. Other related papers include Kingston, Ren,
I The material in this paper was partially presented at 46th IEEE InternationalConference on Decision and Control, New Orleans, December 2007. This paper wasrecommended for publication in revised form by Associate Editor Zhihua Qu underthe direction of Editor Andrew R. Teel.∗ Tel.: +1 858 822 4243; fax: +1 858 534 4387.E-mail address: [email protected].
0005-1098/$ – see front matter© 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.automatica.2009.05.013
and Beard (2005), Schenato and Zampieri (2006) and Xiao, Boyd,and Kim (2007), which study how consensus algorithms arerobust to communication, measurement noise and quantizationerrors. However, the type of algorithms considered in these worksare linear, while the Circumcenter Algorithm is nonlinear andagents’ motion is constrained. For simplicity, we consider herefirst-order dynamics for each agent. Rendezvous algorithms fornonholonomic vehicles has been studied in; e.g., Dimarogonas andKyriakopoulos (2007).The contributions of this paper can be summarized as follows.
First, we propose an alternative to the standard CircumcenterAlgorithm. The alternative algorithm, which has been termedas the ‘‘1/2 Circumcenter Algorithm’’, does not require either ofthe following: (i) the explicit computation of constraint sets soagents maintain connectivity with others within distance r >0, and (ii) knowledge of the absolute positions of neighbors.Second, we propose two possible modifications of the standardCircumcenter Algorithm and the new 1/2 Circumcenter Algorithmto deal with noisy measurements. The assumption is that everymeasured neighbor’s position belongs to a disk centered at theneighbor’s true position and radius σ < r . This noise can makeagents lose connectivity when they implement the standard orthe 1/2 Circumcenter Algorithms. The two proposed modificationsof each algorithm guarantee agent connectivity. The first onerestricts further each agent’s motion constraint set to guaranteeconnectivity of the network (variant 1). In the second one, agentsfilter measurements of neighbors to make sure that they are stillwithin the connectivity radius r (variant 2).After this, we look at all variants of the modified circumcenter
algorithms in 1D and analyze themusing a deterministic approach.Being the proofs analogous, we present a detailed account ofthe modified (standard) Circumcenter Algorithm, variant 1. All

S. Martínez / Automatica 45 (2009) 2010–2017 2011
proofs make use of basic mathematical arguments, require initialagent connectivity under the r-disk graph, and different lower-bounds on r/σ . For example, themodified (standard) CircumcenterAlgorithm, variants 1 and 2, require that r > 7σ .We also show thatthe practical stability ball where all agents converge under any ofthe modified algorithms has a diameter upper bounded by 2σ .As shown in simulations, the same type ofmulti-agent behavior
does not hold for other graphs. To dealwith those cases andmotionin higher dimensions, we make use of stochastic analysis tools.By using an argument similar to that of the LaSalle invarianceprinciple, we can characterize the behavior of the modified 1/2Circumcenter Algorithm. More precisely, we can prove that theexpectation of the position of every agent tends to the same pointas time goes to infinity. This holds for any r/σ > 1, and under aperiodic strong-connectivity assumption detailed in the paper. Ingeneral, we see that the diameter of the practical stability ball isupper bounded by r − σ or r .We also look at executions of the algorithms in simulation. In
all cases, agents reach a practical stability ball with diameter muchsmaller than 2σ when using the r-disk graph. Simulations alsoshow that convergence holds for small ratios r/σ at the expenseof longer convergence times. In general, the convergence getsworse as connectivity becomes sparser and the number of agentsincreases.With respect toMartínez (2007), herewepresent the 1/2Circumcenter Algorithm and extend the stochastic analysis to 2D.The paper is organized as follows. Section 2 introduces
preliminary notions, circumcenter algorithms and modifications.Section 3 includes a deterministic analysis of the modifiedcircumcenter algorithms when implemented in 1D and over ther-disk graph. Section 4 includes a stochastic analysis of thealgorithms in 2D. Finally, Section 5 illustrates the performanceof the algorithms in simulations and Section 6 presents someconcluding remarks.
2. Preliminaries
Here, we review some notation for standard geometric objects;for additional information the reader is referred to Bullo, Cortés,and Martínez (2009) and de Berg, van Kreveld, Overmars, andSchwarzkopf (2000). We then recall the circumcenter and parallelcircumcenter algorithms as discussed in Ando et al. (1999), Lin,Morse, and Anderson (2007b) and Martínez, Bullo, Cortés, andFrazzoli (2007). The section concludes introducing the new classof modified circumcenter algorithms.
2.1. Basic geometric notions and notation
In what follows, Rd will refer to either R or R2. For a boundedset S ⊂ Rd, we let co(S) denote the convex hull of S and diam(S) =diam(co(S)) = maxq1,q2∈S ‖q1−q2‖ its diameter. For p, q ∈ Rd, welet (p, q) = λp + (1 − λ)q | λ ∈ (0, 1) and [p, q] = co(p, q)denote the open and closed segment with extreme points p and q,respectively. For a bounded set S ⊂ Rd, we let CC(S) and CR(S)denote the circumcenter and circumradius of S, respectively, thatis, the center and radius of the smallest-radius d-sphere enclos-ing S. Let S = q1, . . . , qk ⊆ R2, then it can be proved thatCC(S) ∈ co(S) \ S. The computation of the circumcenter and cir-cumradius of a bounded set is a strictly convex problem and inparticular a quadratically constrained linear program. In particu-lar, the circumcenter of a set of points CC(q1, . . . , qk) becomes acontinuous function of q1, . . . , qk. For p ∈ Rd let D(p, r) denotethe closed disk of center p and radius r ∈ R>0.In the sequel we will use tuples P = (p1, . . . , pn) ∈ Rdn to
refer to the positions of a group of n robots in space. The algo-rithms we consider are implemented in discrete time over a time
schedule m = 0, 1, 2, 3, . . ., and give rise to point sequencesPm = (p1,m, . . . , pn,m) ∈ Rdnm≥0.A proximity graph function G(P ) associates to a point set P =
p1, . . . , pn ⊂ Rd an undirected graphwith vertex setP and edgeset EG(P ) ⊆ P × P \ diag(P × P ). In other words, the edgeset of a proximity graphmay depend on the location of its vertices.General properties of proximity graphs, basics on graph theory andexamples can be found in Jaromczyk and Toussaint (1992), de Berget al. (2000) and Bullo et al. (2009). In particular, we will make useof the r-disk proximity graph Gdisk(r), for r ∈ R>0, over a set ofvertices P . In this graph, two agents pi, pj ∈ P are neighbors iff‖pi − pj‖ ≤ r . We denote the set of neighbors of agent pi in G(P )by:
Ni(G) = j ∈ 1, . . . , n \ i | (pi, pj) ∈ EG(P ),
and the cardinality of Ni(G) will be denoted as ni = |Ni(G)|.A sequence of tuples Pmm≥0 (or associated finite point setsPmm≥0) and a given G induce a sequence of graphs that wedenote as G(m), m ≥ 0, when it is clear from the context thatG(m) ≡ G(Pm). We will also consider proximity graphs subject tolink failures, GF (P ). These are graphs on P with an edge set thatmay also be dependent on the location of the vertices. However,given (pi, pj) in GF (P ), the reversed edge (pj, pi) may not be inGF (P ). In other words, GF (P ) is a directed graph. We will usethese graphs to capture sensing or communication failures. Whenelements in the setP are indexed by i ∈ 1, . . . , n = V , the graphGF (P ) can be associated with a graph G over V in a natural way.With a slight abuse of notation, we will sometimes identify thesetwo objects.For q0 and q1 in Rd, and for a convex closed set Q ⊂ Rd with
q0 ∈ Q , let λ(q0, q1,Q ) denote the solution of the strictly convexproblem:
maximize λsubject to λ ≤ 1, (1− λ)q0 + λq1 ∈ Q . (1)
Note that this convex optimization problem has the following in-terpretation: move along the segment from q0 to q1 the maximumpossible distance while remaining in the constraint set Q . Underthe stated assumptions the solution exists and is unique. We willmake explicit use of the constraint set in the circumcenter algo-rithms that follow.
2.2. Circumcenter algorithms
In the following, we present an informal description of oneexecution of the Circumcenter Algorithm for a group of agents P .It is defined for any graphGF (P ) ⊆ Gdisk(r)(P ), with r ∈ R>0. Fora formal description of this algorithm written in pseudocode, thereader is referred to Bullo et al. (2009).
(Standard) Circumcenter Algorithm (Ando et al., 1999; Lin et al.,2007a; Cortés et al., 2006) Each agent performs the followingactions: (i) it detects its neighbors according to the connectivitygraph; (ii) it computes the circumcenter of the point setcomprised of its neighbors and of itself; (iii) it moves tothe closest point to the circumcenter while remaining in aconstraint set Qi =
⋂j∈Ni(G)∪i
D(pi+pj2 , r2
). The constraint set
guarantees connectivity with the group of previous neighborsin Gdisk(r)(P ).
This algorithm can be implemented by each agent with knowl-edge of neighbors’ positions in a local frame. When implementedover a proximity graph with failures, GF ⊂ Gdisk, convergenceof the algorithm can be guaranteed as long as GF is periodicallystrongly connected (Cortés et al., 2006). The asynchronous behav-ior of the algorithm for was studied in Flocchini et al. (2001) and

2012 S. Martínez / Automatica 45 (2009) 2010–2017
Lin et al. (2007a). InMartínez et al. (2007), it was proven that, whenimplemented over a 1D space, it is not necessary to enforce theconnectivity constraint. In other words, step (iii) can be rephrasedas ‘‘(iii) agent moves to the circumcenter of neighbors’’. Assumingthat agents have knowledge of a frame with parallel axes,1 the 1Dalgorithm can be extended to arbitrary dimensions as follows:
Parallel Circumcenter Algorithm (Martínez et al., 2007). Eachagent performs the following actions: (i) it detects its neighborsaccording to the connectivity graph; (ii) it projects the detectedpositions to each axis of its frame; (iii) it computes thecircumcenters of each of the projected sets of positions on eachaxis of its frame; (iii) it moves to the point whose coordinatesare given by each of those circumcenters (motion inside aconstraint set is not necessary.)
Yet there is another way to define a circumcenter algorithm thatrequires neither the explicit use of constraint sets nor knowledgeof a frame with parallel axes. It is based on the following lemma.
Lemma 1. Let p1, . . . , pn be points in Rd. Let s > 0 and define thedisks D(pi, s), i ∈ 1, . . . , n. If the intersection
⋂ni=1 D(pi, s) is non
empty, then CC(p1, . . . , pn) ∈⋂ni=1 D(pi, s).
The proof is omitted due to space constraints. The reader is referredto an enlarged version of themanuscript in Martínez (2009), for allthe omitted proofs.Now the (standard) Circumcenter Algorithm can be replaced by
the following novel algorithm.
1/2 Circumcenter Algorithm. Each agent performs the followingactions: (i) it detects its neighbors according to the connectivitygraph; (ii) it computes the circumcenter of points comprisedof itself and the midpoints between each neighbor and itself;(iii) it moves to the point whose coordinates are given by thiscircumcenter.
In other words, the new circumcenter for agent i becomesCC(pi,
pi+pj2 | j ∈ Ni(G)). Since ‖pi−pj‖ ≤ r , then ‖pi−
pi+pj2 ‖ ≤
r2 ,
for all j ∈ Ni(G) ∪ i. Therefore pi ∈ Qi 6= ∅. By Lemma 1, wehave that CC(pi,
pi+pj2 | j ∈ Ni(G)) ∈ Qi. That is, moving to this
new circumcenter, we guarantee that agents will not lose connec-tivity with neighbors in Gdisk(r). At the same time, CC(pi,
pi+pj2 |
j ∈ Ni(G)) ∈ co(pi,pi+pj2 | j ∈ Ni(G)), see previous section, and
pi+pj2 ∈ co(pj, pi | j ∈ Ni(G)) \ pj, pi | j ∈ Ni(G); thus CC(pi,
pi+pj2 | j ∈ Ni(G)) ∈ co(pj, pi | j ∈ Ni(G)) \ pj, pi | j ∈ Ni(G).Similarly to Cortés et al. (2006), these are the key propertiesone needs to prove convergence of the algorithm for periodicallystrongly-connected graphs GF ⊆ Gdisk.A significant difference between the 1/2 Circumcenter Algo-
rithm and the (standard) Circumcenter Algorithm is that, undercomplete agent connectivity, rendezvous does not occur in a sin-gle step. This is because the goal CC(pi,
pi+pj2 | j ∈ Ni(G)) is not the
same for agents at different positions.
2.2.1. Modified circumcenter algorithmsAssume now that each agent is only able to detect a perturbed
position of each neighbor. In other words, agent i measures theposition of agent j as pij ≡ pj + ω
ij , where ω
ij ∈ D(0, σ ), σ < r ,
is an error measurement vector chosen according to a uniformprobability distribution. In particular, we have that E[pij] = pj, forall j ∈ Ni(G).
1 That is, any two frames B1 , B2 such that B2 = R(B1) where R is a rotation ofeither π/2, π, 3π/2 or 0 angle.
Table 1Modified 1/2 Circumcenter Algorithm, variant 1.
Due to measurement errors, an agent that implements a cir-cumcenter algorithm may lose connectivity with neighbors. Ifagents have access to a common upper bound on the sensing er-ror radius, σ , there are two possible corrections they can imple-ment. The first consists of restricting the constraint set where theyare allowed to move (variant 1). The second one consists of filter-ing neighbors’ positions (variant 2). For the sake of briefness, wepresent only the formal description of the Modified 1/2 Circum-center Algorithm, variants 1 and 2, being the modifications for thestandard case analogous. The algorithms allow each agent to com-pute ui,m+1 at time m ≥ 0 so that pi,m+1 = pi,m + ui,m+1, for alli ∈ 1, . . . , n.As expected, the noise will affect the emerging behavior of the
multiagent system. Eventually, the proposed algorithms will onlyachieve ‘‘practical rendezvous’’ in the sense that robot positions(p1, . . . , pn) ∈ Rdn will converge to a neighborhood of diag(Rdn).This neighborhood depends on σ and, as σ tends to 0, it shrinksto a point in diag(Rdn). This is analogous to what happensto practically stable dynamical systems and thus the name of‘‘practical rendezvous’’. See the formal description of the modified1/2 Circumcenter Algorithms, variant 1 (1/2-MCA.v1 for short) inTable 1.The Modified (standard) Circumcenter Algorithm, variant 1
(MCA.v1 for short), is similar to the above one with the followingsubstitutions. Step 2 becomes Mi =
pij1 , . . . , p
ijni
∪ pi, with
j` ∈ Ni(G), Step 3 becomes Qi =⋂q∈Mi
D( q+pi2 ,r−σ2 ), and Step 7 is
substituted by (i) the computation of λ∗i = λ(pi, CC(Mi),Qi); see(1), and (ii) ui = λ∗i (CC(Mi) − pi). Observe that, although the setMi is different for this algorithm, themotion constraint setQi is thesame.An alternative to the 1/2-MCA.v1 is the Modified 1/2 Circum-
center Algorithm, variant 2 (1/2-MCA.v2 for short), that filters thevalues pij as described in Table 2. Observe that with variant 2 it is
always true that pi ∈ Qi = ∩j∈Ni(G)∪i D(pi+pij2 , r2
)6= ∅, where
pij corresponds to the filtered position of neighbor j. Thus, the ex-plicit computation of Qi can be eliminated from the algorithm.Again, the Modified (standard) Circumcenter Algorithm, variant 2(MCA.v2 for short), is similar to the one in the table with the fol-lowing substitutions. Step 5 becomesMi =
pij1 , . . . , p
ijni
∪ pi,
with j` ∈ Ni(G), and Step 6 is substituted by (i) compute Qi =
∩q∈Mi D(q+pi2 ,
r2
), (ii) computeλ∗i = λ(pi, CC(Mi),Qi); see (1), and
(iii) apply ui = λ∗i (CC(Mi)− pi).

S. Martínez / Automatica 45 (2009) 2010–2017 2013
Table 2Modified 1/2 Circumcenter Algorithm, variant 2.
All modified circumcenter algorithms guarantee agent connec-tivity as shown in the following lemma.
Lemma 2 (Connectivity Maintenance). Let p1,m, . . . , pn,m ∈ Rd bethe positions of n agents at time m ≥ 0, and suppose that ‖pi,m −pj,m‖ ≤ r for some i, j ∈ 1, . . . , n. Let σ < r be an upper boundon the sensing error radius. Then, after one execution of any of themodified circumcenter algorithms, we have that ‖pi,m+1 − pj,m+1‖≤ r.
3. Deterministic analysis of the modified circumcenter algo-rithms
Here, we present a deterministic analysis of the convergence ofthe modified circumcenter algorithms in 1Dwith Gdisk(r) for somer ∈ R>0. In particular,wewill focus on theMCA.v1, since the proofsfor the other algorithms are analogous.We will employ the following shorthand notation: piM =
maxpi, pij | j ∈ Ni(Gdisk(r)) (resp. piM = maxpi, pj | j ∈ Ni
(Gdisk(r))), and pim = minpi, pij | j ∈ Ni(Gdisk(r)) (resp. pim =
minpi, pij | j ∈ Ni(Gdisk(r))). In this way, CCi = CC(pi, pij|j ∈Ni(Gdisk(r))) = 1
2 (piM + p
im), and CCi = CC(pi, pj|j ∈ Ni(Gdisk(r)))
=12 (p
iM + p
im), i ∈ 1, . . . , n. Before stating the main result
of the section, we present some properties of the MCA.v1 andits constraint set. These are employed extensively in the proof ofTheorem 5.
Lemma 3. The constraint set Qi in the modified CircumcenterAlgorithm, variant 1, satisfies:(i) pi ∈ Qi if and only if ‖pi − pij‖ ≤ r − σ for all j ∈ Ni(Gdisk(r)).(ii) In 1D, Qi is equal to[
12(pi + piM)−
12(r − σ),
12(pi + pim)+
12(r − σ)
]and Qi 6= ∅ if and only if ‖piM − p
im‖ ≤ 2(r − σ).
Lemma 4. Let p1,m, . . . , pn,m ∈ R be the positions of n agents attime m ≥ 0. Suppose each agent executes one step of the MCA.v1.Assume there are q1, q2 ∈ R, such that q1 < CCi,m < q2 for agenti ∈ 1, . . . , n. We have:(i) If Qi,m 6= ∅ and
pim,m + pi2
+r − σ2− q1 > 0, (2)
then pi,m+1 > q1.
(ii) If Qi 6= ∅ and
piM,m + pi2
−r − σ2− q2 < 0,
then pi,m+1 < q2.(iii) If Qi = ∅ and q1 < pi,m < q2, then q1 < pi,m+1 < q2.
Theorem 5. Let p1,0, . . . , pn,0 ∈ R be the initial positions of a roboticnetwork. Suppose the agents are initially connected by Gdisk(r) forsome r ∈ R>0. Let σ < r, be the sensing error radius and let Pmm≥0be a sequence of positions obtained by applying the Modified(standard) Circumcenter Algorithm, variant 1, with Gdisk(r). Then, ifr > 7σ , we have that Pm → S, as m→∞, where
S = P ∈ Rn | diam(P) ≤ 2σ .
Proof. The proof is based on the following argument. If at timem the agents are not in a ball of diameter 2σ , then diam(p1,m+`,. . . , pn,m+`) < diam(p1,m, . . . , pn,m) for ` = 1 or ` = 2. Withoutloss of generality, suppose that p1,m and pn,m satisfy p1,m ≤ pi,m ≤pn,m, for all i ∈ 1, . . . , n. Then the result holds if p1,m < pi,m+` <pn,m, for all i ∈ 1, . . . , n, and ` = 1 or ` = 2. We prove thefirst inequality holds, since the proof of the second inequality isanalogous.If diam(p1,m, . . . , pn,m) > 2σ , we distinguish two possible
cases:
(a) ∃j ∈ N1(Gdisk(r)(m)) s. t. ‖p1,m − pj,m‖ > 2σ .(b) ∀k ∈ N1(Gdisk(r)(m)) we have that ‖p1,m − pk,m‖ ≤ 2σbut ∃ j ∈ N1(Gdisk(r)(m)) such that ‖p
jM,m − pj,m‖ ≤ r and
‖pjM,m − p1,m‖ > r .
From here, one can employ basic mathematical arguments to getto the conclusions of the theorem. The rest of the proof is omitteddue to space constraints.
Remark 6. This result holds independently of the number ofagents in the network, which in particular does not affect thediameter 2σ of the practical stability ball. As we show insimulations later, the ball does wander in space by the effect ofnoise. The proof of the theorem gives only sufficient conditions todecrease the diameter of the group strictly after two time steps.Simulations show convergence for much smaller ratios r/σ . •
Remark 7. The proof of convergence of Theorem 5 makes explicituse of the fact that the connectivity graph is Gdisk(r); e.g., so that(a) and (b) are the only two possibilities when diam(Pm) > 2σ . Aswe show in simulations later, convergence to a practical stabilityball of a similar radius can be observed for other graphs as well.The proof of Theorem 5 can be easily modified to prove stability ofvariant 2 of the algorithm, with the difference that we do not needtomake sure that Qi 6= ∅ since this property is always true. Finally,the proof can also be adapted for the modified 1/2 CircumcenterAlgorithm, variant 1 and 2. In this case, we do not need to use
Lemma 4, since the motion of agents is to CCi =piM+2pi+p
im
4whenever the constraint set Qi is not empty. The analogous proofmethod leads to a required r/σ > 19. The higher ratio is due tothe slower motion of agents to the new circumcenters. •
Remark 8. The deterministic analysis of the algorithm guaranteesperformance in 1D. Although restrictive, the analysis can alsobe used to guarantee performance of the modified ParallelCircumcenter algorithms, valid in higher dimensions. Recall thata requirement for the implementation of this algorithm is thatagents have knowledge of reference frames with parallel axes. •

2014 S. Martínez / Automatica 45 (2009) 2010–2017
4. Stochastic analysis of theModified Circumcenter Algorithms
In this section, we present a stochastic analysis of the 1/2-MCA.v1 and 1/2-MCA.v2. For this purpose, we need to introducesomenotation and a description of the algorithm through aMarkovprocess evolving under a set-valued map.Let (Ω,F , P) denote a compact probability space. Outcomes
ω ∈ Ω correspond to an error measurement vector ω = (ωij). Inour particular algorithms, pij = pj + ω
ij , for j ∈ Ni(G), and we will
assume that Ω = Πni=1Πnj=1D(0, σ ). Let R = R : Ω → Rnd |
R = (R1, . . . , Rn) R.V. denote the set of random variables overΩ . As in the previous section, let us denote the agents’ positionsas P = (p1, . . . , pn) ∈ Rdn. An initial condition P0 determinesa constant random variable R0(ω) = P0, ω ∈ Ω . A particularsequence of measurement outcomes ωm and the application ofa circumcenter algorithm will determine a Markov process Rm |Rm ∈ Rm≥0, and agents positions Pmm≥0 so that Rm(ωm) = Pmfor allm ≥ 0.The random variable R obtained after applying a circumcenter
algorithm for amultiagent system connected under the fixed graphG, can be described by a map FG : Rnd → R such that
R(ω) = FG(P)(ω) ≡ FG(P, ω)= (FG,1(P, ω), . . . , FG,n(P, ω)), ω ∈ Ω.
For instance, under the 1/2-MCA.v1., the randomvariable R is givenby R(ω) = FG(P)(ω) = (CC(g1(G, P +ω)), . . . , CC(gn(G, P +ω))),where gi(G, P + ω) = pi when Qi = ∅ otherwise
gi(G, P + ω) =
(pi,pi + pj1 + ω
ij
2, . . . ,
pi + pjni + ωijni
2
),
where jk ∈ Ni(G).
Circumcenter algorithms employ proximity graphs, thereforeG = G(P) for some G ∈ GPF, will not be fixed from one step tothe next. Similar to Cortés et al. (2006), we make use of set-valuedmaps to analyze the algorithms under a sequence of switchinggraphs. In particular, the set valued-map T : Rnd ⇒ R,
T (P) = FG(P) | G ∈ GPF, (3)
defined in association with F , is used to describe the algorithm asfollows. Taking R0 = P0, we have
Rm+1 ∈ T (Pm),
Pm+1 = Rm+1(ωm+1), m ≥ 0. (4)
That is, Rm+1(ω) = FGm(Pm)(ω) for some Gm ∈ GPF and all ω ∈ Ω .In this way, the set-valued map captures the evolution of thealgorithm under any sequence of switching graphs.It is easy to see that the maps FG, G ∈ GPF, satisfy the following
properties:
(i) FG(P, ω) is continuous in (P, ω),(ii) FG(P, ω) is invariantmodulo points in diag(Rnd). That is, FG(P+
(q, . . . , q), ω) = FG(P, ω)+ (q, . . . , q), for any q ∈ Rd.
In the sequel, wewill also workwith an associatedMarkov processRmm≥0 defined as follows. Consider FG : Rnd → R, G ∈ GPF, suchthat
FG = FG − (π1 FG, . . . , π1 FG),
where π1 : (Rd)n → Rd is the natural projection, and defineT : Rnd ⇒ R
T (P) = FG(P) | G ∈ GPF. (5)
Then, from an initial condition P0 ∈ Rnd, R0 = P0,
Rm+1 ∈ T (Pm).
Pm+1 = Rm+1(ωm+1), m ≥ 0. (6)
Because of property (ii) above, taking P0 = P0, one can see that
Rm = Rm − (π1 Rm, . . . , π1 Rm), m ≥ 0, (7)
where it is assumed that the sequences ωmm≥0 and Gmm≥0,chosen to obtain Rmm≥0 and Rmm≥0, are the same. Property (i)implies the following results.
Lemma 9. Consider the set-valuedmap T defined as in (3) in associa-tionwith FG satisfying (i) (resp. themap T as in (5)). Then T (resp. T ) isclosed. That is, given sequences Rm and Pm such that Rm ∈ T (Pm),for all m ≥ 0, and Rm → R (punctual convergence), Pm → P, thenR ∈ T (P).
Proposition 10. Consider a sequence of random variables Rmm≥0defined as in (4) in association with maps FG that satisfy Prop-erty (i) (resp. a family Rm as in (6)). Then, (a) if Rmm≥0 is uni-formly bounded inΩ then it is an equicontinuous family, and (b) if Tis defined from a modified circumcenter algorithm, then all sequencesRmm≥0 are uniformly bounded inΩ .
Given a discrete-time Markov process, Rm, we can define anomega-limit set for it as follows:
Φ(Rm) = R : Ω → Rdn Random Variable |∃Rmk ⊆ Rm s.t. Rmk → R uniformly inΩ.
Observe that if Rm is uniformly bounded and equicontinuous, bythe Ascoli–Arzela theorem, there is always a subsequence Rmkthat is uniformly convergentRmk → R. In thisway,R ∈ Φ(Rm) 6= ∅.Suppose further that Rm is determined from a set-valued map T .We say thatΦ(Rm) is (weakly) positively invariant with respect toT if for every R ∈ Φ(Rm) there exists ω ∈ Ω , and R′ ∈ T (R(ω))such that R′ ∈ Φ(Rm). The following result holds.
Proposition 11. Let T be a set-valued map defined as in (3) inassociation with maps FG satisfying Property (i). Consider a uniformlybounded sequence Rm defined as in (4). Then Φ(Rm), is weaklypositively invariant with respect to T .
Proof. Suppose that R ∈ Φ(Rm). Then, there is a subsequenceRmk → R uniformly. Now, since Rm is uniformly bounded inΩ by hypothesis, by Proposition 10 is an equicontinuous family.Therefore, the limit R is continuous over Ω . Note also that Rmk isalso uniformly continuous over the compactΩ .Consider now Rmk+1 ∈ T (Rmk(ωmk)). The sequence ωmk ⊆ Ω
has a convergent subsequence to ω ∈ Ω because Ω is compact.Denote this subsequence by ωmk for simplicity. We have thatlimk→∞ Rmk(ωml) = R(ωml) for every l, and limk→∞ Rmk(ω) =R(ω). Using the property of equicontinuity of Rmk converging to R,and the continuity of R, it follows that limk→∞ Rmk(ωmk) = R(ω).Consider now the sequence Rmk+1. Since by Proposition 10
the family is equicontinuous and uniformly bounded, the As-coli–Arzela theorem guarantees that there exists a uniformlyconvergent subsequence. For ease of notation, we denote the sub-sequence in the same way, i.e. Rmk+1 → R′. Thus, R′ ∈ Φ(Rm).The result follows if we can prove that there exists ω such thatR′ ∈ T (R(ω)).Now we use the fact that T is closed (see previous lemma) to
conclude the result. By hypothesis Rmk+1 ∈ T (Rmk(ωmk)). Then, wehave that
R′(ω) = limk→∞
Rmk+1(ω)
∈ limk→∞
T (Rmk(ωmk))(ω) ⊆ T (R(ω))(ω),
for all ω ∈ Ω .
The following is a general theorem that will be used as part ofthe argument in the proof of convergence ofmodified circumcenteralgorithms.

S. Martínez / Automatica 45 (2009) 2010–2017 2015
Theorem 12. Let T : Rnd ⇒ R a closed set-valued map defined inassociation with maps FG satisfying Property (i). Consider sequencesPmm≥0 ⊆ Rnd and Rmm≥0 ⊆ R such that Rm+1 ∈ T (Pm),with m ≥ 0. Suppose that (a) there exists a continuous Lyapunovfunction V : Rnd → R≥0 such that V (E[Rm+1]) ≤ V (E[Rm]), for allm ≥ 0, (b) Rmm≥0 is uniformly bounded inΩ . Then Rm convergesto the largest (weakly positively) invariant set contained in
R ∈ R | ∃R′ ∈ T (R(ω))for some ω ∈ Ω and V (E[R′]) = V (E[R]).
Proof. First observe that Proposition 11 implies that Φ(Rm) isweakly positively invariant under T . Now consider the sequenceV (E[Rm]). Because of (a) we have that limk→+∞ V (E[Rm]) = c ≥ 0.The conclusion of the theorem follows if we can prove that forevery R ∈ Φ(Rm) it must be that V (E[R]) = c.Since R ∈ Φ(Rm) there exists a subsequence Rmk such
that Rmk → R uniformly. Since uniform convergence impliesconvergence in expectation, we have that limk→+∞ E[Rmk ] = E[R].Now, the continuity of V implies that limk→+∞ V (E[Rmk ]) = V(E[R]). Since limm→+∞ V (E[Rm]) = c , it must be that V (E[R]) = c.Finally, the fact that Φ(Rm) is weakly positively invariant and
V E is constant onΦ(Rm) implies that
Φ(Rm) ⊂ R ∈ R | ∃ω ∈ Ω and R′ ∈ T (R(ω)) ∩ (V E)−1(c).
That is, Φ(Rm) is in the largest (weakly positively) invariant setcontained in a level set of V E.
The above theorem implies that there are always sequencesthat can be generated from elements in Φ(Rm) that belong toa common level set of V E. That is, for R ∈ R, we canfind an ω1 and S1 ∈ Φ(Rm) such that S1 ∈ T (R(ω1)) withV (E[S1]) = V (E[R]). Recursively, there is ωm, and Sm+1 ∈ Φ(Rm)such that Sm+1 ∈ T (Sm) and V (E[Sm+1]) = V (E[Sm]), m ≥ 0.The following results are lemmas necessary to prove that withprobability one, any sequence V (E[Sm])m≥0, where Sm definedas in (6) from a 1/2-MCA algorithm, will decrease strictly whenthere is frequent multiagent connectivity. This fact together withthe weak invariance property of Φ(Rm) will serve to prove ourconvergence result by a contradiction argument.
Lemma 13. Let p1, . . . , pn ∈ R2 be the n vertices of a convex polygonordered in a counterclockwise manner. Then, there exists a vertex pisuch that the angle of the polygon at this vertex,αi = 6 (pi−1, pi, pi+1),is bounded by (n− 2)π/n < π/2.
Lemma 14. Let p1, . . . , pn ∈ R2 be the n vertices of a convex polygonordered in a counterclockwise manner. Let r > σ > 0 and k > 0.Suppose that α1 = 6 (q1, p1, q2) ≤ 2α = (n−2)π/n, that q1, q2 areat a distance r−σ+k from p1, and that the sector of D(p1, r−σ+k)limited by the angle 6 (q1, p1, q2) contains all other pj, j ∈ 1, . . . , n.
(i) The following set inclusion holds:
I0 = D(p1,r − σ2
)∩ D
(p1 + q12
,r − σ2
)∩
· · · ∩ D(p1 + q22
,r − σ2
)⊆
n⋂i=1
D(p1 + pj2
,r − σ2
)(ii) If k ≤ min
(r − σ) 1−sinαsinα , (r − σ)
1−cosαcosα
, then I0 6= ∅.
Theorem 15. Let p1,0, . . . , pn,0 ∈ R2 be the initial positions ofa robotic network. Suppose the agents are initially connected byGdisk(r) for some r ∈ R>0. Let σ < r, be the sensing error radius,and let Rm = (R1,m, . . . , Rn,m)m≥0 denote the discrete-timeMarkovprocess obtained by applying the Modified 1/2 CircumcenterAlgorithm (variant 1 or 2) with Gdisk. Then Rm converges w.p.1 tothe set
M = R ∈ R | diam(E[R]) = 0⇔ E[R] ∈ diag(Rnd).
Proof. In the following we will consider both Rmm≥0, andRmm≥0 defined as in (6) from amodified circumcenter algorithm.Observe that diam(E[Rm]) = diam(E[Rm]) for all m ≥ 0. We willmake use of Theorem 12 to first prove that Rm converges to aninvariant set contained in a level set of diam E.First, by Proposition 10 the process Rm≥0 is uniformly
bounded inΩ . Second, because the circumcenter of a set of pointsis a continuous function, the FG, G ∈ GPF are continuous or satisfyProperty (i). Lemma 9 implies then that T and T are closed. Third,the function diam : Rnd → R≥0 is continuous. In the following wesee that diam is non-increasing along the sequence Rmm≥0.Given a sequence of events ω1, . . . , ωm, we have that co(E
[Rm+1(ω)|ω1, . . . , ωm]) ⊆ co(Rm(ωm)). To see this, first observethat
Ri,m+1(ω) ∈ co(pi,m, Riji,m(ω)|ji ∈ Ni(m)).
Since taking expectations is a linear operation, then
E[Ri,m+1(ω)|ω1, . . . , ωm] ∈ co(pi,m, Rj1,m, . . . , Rjni ,m).
In turn, co(pi,m, Rj1,m, . . . , Rjni ,m) ⊆ co(Rm), therefore E[Rm+1|ω1,. . . , ωm] ∈ co(Rm) for all m ≥ 0. An analogous argument can beemployed to deduce that E[Rm|ω1, . . . , ωm] ∈ co(Rm). Now, byFubini’s theorem we have
E[Rm+1] = E[E[Rm+1|ω1, . . . , ωm]] ∈ E[co(Rm)].
Again by linearity of the expectation operator and the definition ofconvex hull of a set of points, this implies E[Rm+1] ⊆ co(E[Rm]).Therefore, co(E[Rm+1]) ⊆ co(E[Rm]) and 0 ≤ diam(E[Rm+1]) ≤diam(E[Rm]), for allm ≥ 0.By Theorem 12, we have that Rmm≥0 converges to the largest
(weakly positively) invariant setM contained in a level set of V E.Using a contradiction argument we see next that if R ∈M then
diam(E[R]) = 0 with probability one. Let R ∈ M. Suppose thatdiam(E[R]) = c > 0. Consider any sequence Smm≥0 definedfrom the initial condition S0 = R and the algorithm T . By theweak invariance property ofM, it must be that we can always finda sequence such that diam(E[Sm]) = c for all m ≥ 0. We willshow that with probability one, for all the sequences chosen thereism0 > 0 such that diam(E[Sm0 ]) < c. This is a contradiction withthe invariance property ofM.Consider E[S0] = (p1,0, . . . , pn,0) and suppose that pi,0 6= pj,0
by simplicity (the case pi,0 = pj,0 for some i, j is similar). By the1/2-MCA.v2, we have that pi,1 coincides with the circumcenter
of Mi =
pi,0,
pi,0+pij,02 | j ∈ Ni(0)
(no constraint restricted by
r − σ is enforced and connectivity under Gdisk(r) is preserved).This implies that pi,1 ∈ co(pi,0, pij,0) \ pi,0, p
ij,0 | j ∈ Ni(0) and
therefore E[pi,1] ∈ co(pi,0, pj,0) \ pi,0, pj,0 | j ∈ Ni(0). Thus,diam(E[S1]) < diam(E[S0]), for any outcome ω ∈ Ω , which is acontradiction with the weak invariance ofM.For the 1/2-MCA.v1., we can not guarantee in general that
Qi(0) 6= ∅ for all i ∈ 1, . . . , n and thus agents may remainstationary. A contradiction argument will prove that there existsat least an agent i, such that pi,0 ∈ ∂(cop1,0, . . . , pn,0), with pi,0

2016 S. Martínez / Automatica 45 (2009) 2010–2017
determining the diameter of cop1,0, . . . , pn,0, and a time m > 0such that Qi(m) 6= ∅ with probability one. This implies that w.p.1there exists a time m > 0 such that E[co(Sm)] ( E[co(S0)] anddiam(E[Sm]) < diam(E[S0])with probability one.Assume that Qj(m) = ∅ for all m > 0 and j ∈ 1, . . . , n.
As a consequence, none of the agents will be able to move. ByLemma 13, there exists i ∈ 1, . . . , n, such that pi,0 ∈ ∂(cop1,0, . . . , pn,0), pi,0 determines the diameter of cop1,0, . . . , pn,0,and the angle formed by pi,0 and the positions of any other twoagents pk,0, pj,0, is upper bounded by 6 (pi,0, pj,0, pk,0) ≤ (n −2)π/n < π/2.It is not difficult to see that, for a uniform distribution of pij,0
in a disk of radius σ and centered at pj,0, the probability that‖pi,m − pij,m‖ ≤ r − σ + k, for any k > 0, is a positive one:
P(‖pi,m − pij,m‖ ≤ r − σ + k)
=
1, ‖pi,m − pj,m‖ ≤ r − 2σ ,1πσ 2
∫Ddp > 0, r − 2σ ≤ ‖pi,m − pj,m‖ ≤ r
where D = p ∈ D(pj, σ ) | ‖pi − p‖ ≤ r − σ + k. Let us use thenotation P(‖pi,m− pij,m‖ ≤ r−σ + k) = a > 0 and let us computethe probability of the event A = ∃m > 0 | ‖pi,m − pij1,m‖ ≤r − σ + k for a fixed j1 ∈ Ni(Gdisk(r)). In fact, we can write A asthe disjoint union of events Am,m ≥ 0:
A =∞⋃m=0
Am =∞⋃m=0
‖pi,s − pij1,s‖ > r − σ + k,
∀s ≤ m− 1, and ‖pi,m − pij1,m‖ ≤ r − σ + k.
In this way,
P(A) =∞∑m=0
P(Am) =∞∑m=0
a(1− a)m =a
1− (1− a)= 1.
Reasoning in an inductive manner, we can find w.p.1 an infinitesequence of timesm`, ` ∈ N, such that ‖pi,m`−p
ij1,m`‖ ≤ r−σ +k,
for all ` ∈ N. Similarly, we can find w.p.1 an infinite subsequenceof times m`l , l ∈ N, such that ‖pi,m`l − p
ij1,m`l‖ ≤ r − σ + k and
‖pi,m`l −pij2,m`l‖ ≤ r−σ+k for another neighbor j2 ∈ Ni(Gdisk(r)).
Since the number of neighbors of i is finite, we can extend thisargument to conclude that w.p.1 there exists a m > 0 such thatfor every j ∈ Ni(Gdisk(r))we have that ‖pi,m − pij,m‖ ≤ r − σ + k.How large m is will depend on the number of neighbors of i andhow large k is.Now, by choosing k as in Lemma 14(ii) we can guarantee that
w.p.1 there exist a m > 0 such that Qi(m) 6= ∅. This implies thatfor all possible sequences generated from S0 = R ∈ M, there ism > 0 such that diam(E[Sm]) < diam(E[R]) with probability one.This is a contradictionwith theweak invariance property of the setM, and the property of V E being constant always on sequencesgenerated through elements inM.
Remark 16. The extension of the previous result to the (standard)Circumcenter Algorithm, variant 1, becomes more difficult as itrequires checking that the closest point to E[CC(Mi)] does notcontain any vertex pj,0. In any case, all simulations in 2D showedmultiagent rendezvous to a practical stability ball. •
Corollary 17 (Switching Graphs with Failures). Let p1,0, . . . , pn,0 ∈R2 be the initial positions of a robotic network. Suppose the agents areconnected by a sequence of proximity graphs with failures GF ,m ⊆
Gdisk(r), m ≥ 0, so that for some L > 0, the graph GF ,mL is stronglyconnected, for all m ≥ 1. Let σ ∈ R>0, σ < r, be the sensing errorradius, and let Rm(ω) = (R1,m(ω), . . . , Rn,m(ω))m≥0 denote the
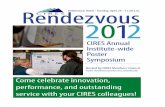
Fig. 1. Modified (standard) Circumcenter Algorithm, variant 2, for 15 agents in 2Dconnected by Gdisk(r), with r = 6. The noise error is bounded by σ = 3.
discrete-time Markov process obtained by applying the 1/2-MCA.v1or 1/2-MCA.v2. Then for any r > σ , with probability one Rm con-verges to the set
M = R ∈ R | diam(E[R]) = 0.
Corollary 18 (Diameter of Stability Ball). Let p1,0, . . . , pn,0 ∈ R2be the initial positions of a robotic network. Suppose the conditions ofCorollary 17 on graph connectivity hold. Let σ ∈ R>0, σ < r, be thesensing error radius, and let Rm(ω) = (R1,m(ω), . . . , Rn,m(ω))m≥0denote the discrete-time Markov process obtained by applyingthe 1/2-MCA.v1 (resp. the 1/2-MCA.v2) with Gdisk. Then w.p.1 agentsconverge to a practical stability ball of diameter r − σ (resp. r.)
5. Simulations
We present some simulations of the modified circumcenteralgorithms here. Fig. 1 shows a run of the Modified (standard)Circumcenter Algorithm, variant 2, forGdisk(r) in 2D, 15 agents and300 time steps. Here r = 6 and σ = 3. The initial connectivity ofthe group of the 15 agents is shown in the left box of Fig. 1 whileits evolution is shown in the right box. There is a slight wanderingof the practical stability ball and its size is not greater than 2σ . Thisbehavior is representative of what we have seen in many repeatedsimulations with different initial conditions and relations r/σ .Simulations of the evolution of the diameter under theModified
(standard) Circumcenter Algorithm, variant 1, for Gdisk(r) areshown in Figs. 2 and 3 for a network of 4 and 50 agents. In generalwe observe that the smaller the group of agents, the increasedwandering of the stability ball and the larger its diameter. Whenthe number of agents is increased, a filtering effect is producedwhich favors the final outcome. Note that, for the case of 50 agents,the diameter function remains constant for some period of time.This is due to the constraint enforcement that does not allowagents to move, which can happen when r − σ is small. Since theinformation about the neighbors positions changes randomly intime according to a uniform distribution, it is clear that eventuallythe constraint sets will become nonempty and agents will be ableto move. This is the essence of the proof of Theorem 15, which isactually proven for the Modified 1/2 Circumcenter Algorithm. Atrick to diminish the wandering effect of the practical stability ballmight be to pick a homogeneous σ ≤ σ0 ≈ r and σ0 < r in thefinal stages of the algorithm. A simulation of Modified (standard)Circumcenter Algorithm, variant 1, for a fixed graph G ⊆ Gdisk(r)and 30 agents is shown in Fig. 4. Convergence here is much slowerdue to the fact that each agent has only two neighbors. Note alsothat the diameter may increase at any time, so a deterministicanalysis like the for Gdisk(r) is no longer feasible.Finally, Fig. 5 illustrates the Modified 1/2 Circumcenter
Algorithm, variant 1, for 15 agents connected in 2D under asequence of switching graphs. Overall, we observe a decreasingtrend until agents reach a ball of approximately r−σ as a diameter.

S. Martínez / Automatica 45 (2009) 2010–2017 2017
Fig. 2. Diameter evolution of a network of 4 agents in 1D connected by Gdisk(r),r = 3, and evolving under theModified (standard) Circumcenter Algorithm, variant1. The noise error is bounded by σ = 1.
Fig. 3. Diameter evolution of a network of 50 agents in 1D connected by Gdisk(r),r = 3, and evolving under theModified (standard) Circumcenter Algorithm, variant1. The noise error is bounded by σ = 1.
Fig. 4. Diameter evolution of a network of 30 agents in 1D connected by G ⊆Gdisk(r), r = 3, and evolving under the Modified (standard) Circumcenter Algo-rithm, variant 1. The noise error is bounded by σ = 1 and the fixed graph Gcorresponds to the Limited Delaunay graph of the initial positions, see Cortés et al.(2006).
Fig. 5. Diameter evolution of a network of 15 agents in 2D connected by a sequenceof graphsG(t) ⊆ Gdisk(r), r = 2, and evolving under theModified 1/2 CircumcenterAlgorithm, variant 1. The noise error is bounded by σ = 1 andG(t) = Gdisk(r) every20 steps.
6. Conclusions
This paper presents variations of the standard CircumcenterAlgorithm in order to (i) remove the explicit computation of theconstraint set, and (ii) deal with noisymeasurements of neighbors.The algorithms are analyzed using deterministic and stochasticanalysis tools. The stochastic part makes use of a LaSalle type of
argument that may be applicable to general multi-agent systemssubject to noise. Simulations show that the convergence of thealgorithm behaves well even under less stringent conditions thanthose given by the theorems. Future work will be devoted tostudying the effect of random graphs and multi-agent connectionswith some probability.
Acknowledgements
This material is based upon work supported by NSF AwardsCMS-0643679, and IIS-0712743. An early version of this workappeared in the 2007 IEEE Conference in Decision and Control.
References
Ando, H., Oasa, Y., Suzuki, I., & Yamashita, M. (1999). Distributed memorylesspoint convergence algorithm for mobile robots with limited visibility. IEEETransactions on Robotics and Automation, 15(5), 818–828.
de Berg, M., van Kreveld, M., Overmars, M., & Schwarzkopf, O. (2000). Computationalgeometry: Algorithms and applications (2nd ed.). Springer.
Dimarogonas, D. V., & Kyriakopoulos, K. J. (2007). On the rendezvous problem formultiple nonholonomic agents. IEEE Transactions on Automatic Control, 52(5),916–922.
Flocchini, P., Prencipe, G., Santoro, N., & Widmayer, P. (2001). Gathering ofasynchronous oblivious robotswith limited visibility. In A. Ferreira, & H. Reichel(Eds.), Lecture notes in computer science: Vol. 2010. STACS 2001, 18th annualsymposium on theoretical aspects of computer science (pp. 247–258). Springer.
Jaromczyk, J. W., & Toussaint, G. T. (1992). Relative neighborhood graphs and theirrelatives. Proceedings of the IEEE, 80(9), 1502–1517.
Kingston, D. B., Ren, W., & Beard, R. W. (2005). Consensus algorithms are input-to-state stable. In American Control Conference (pp. 1686–1690).
Kumar, V., Leonard, N., & Morse, A. (Eds.). (2004). Lecture notes in control andinformation sciences: Vol. 309. Proc. of the 2003 Block Island workshop oncooperative control. Springer-Verlag.
Lin, J., Morse, A., & Anderson, B. (2007a). The multi-agent rendezvous problem—Part 2: The asynchronous case. SIAM Journal on Control and Optimization, 46(6),2120–2147.
Lin, J., Morse, A., & Anderson, B. (2007b). The multi-agent Rendezvous problem—Part 1: The synchronous case. SIAM Journal on Control and Optimization, 46(6),2096–2119.
Bullo, F., Cortés, J., & Martínez, S. (2009). Applied mathematics series, Distributedcontrol of robotic networks. Princeton University Press, Available at http://www.coordinationbook.info.
Martínez, S. (2007). Practical rendezvous through modified Circumcenter Algo-rithms. In IEEE international conference on decision and control.
Martínez, S. (2009). Practical multiagent rendezvous through modified circumcen-ter algorithms. Enlarged version in: http://faemino.ucsd.edu/∼soniamartinez/papers.
Cortés, J., Martínez, S., & Bullo, F. (2006). Robust rendezvous formobile autonomousagents via proximity graphs in arbitrary dimensions. IEEE Transactions onAutomatic Control, 51(8), 1289–1298.
Martínez, S., Bullo, F., Cortés, J., & Frazzoli, E. (2007). On synchronous roboticnetworks – Part II: Time complexity of rendezvous and deployment algorithms.IEEE Transactions on Automatic Control, 52(12), 2214–2226.
Schenato, L., & Zampieri, S. (2006). Optimal rendezvous control for ran-domized communication topologies. In IEEE Conf. on Decision and Control(pp. 4339–4344).
Xiao, L., Boyd, S., &Kim, S.-J. (2007). Distributed average consensuswith least-mean-square deviation. Journal of Parallel and Distributed Computing , 67(1), 33–46.
SoniaMartınez is an assistant professor at theMechanicaland Aerospace Engineering department at UC San Diego.She received her Ph.D. degree in EngineeringMathematicsfrom the Universidad Carlos III de Madrid, Spain, in May2002. Following a year as a Visiting Assistant Professorof Applied Mathematics at the Technical University ofCatalonia, Spain, she obtained a Postdoctoral Fulbrightfellowship and held positions as a visiting researcher atUIUC and UCSB. Dr Martinez’ main research interestsinclude nonlinear control theory, robotics, cooperativecontrol and networked control systems. In particular, her
work has focused on the modeling and control of robotic sensor networks, thedevelopment of distributed coordination algorithms for groups of autonomousvehicles, and the geometric control of mechanical systems. For her work on thecontrol of underactuated mechanical systems she received the Best Student Paperaward at the 2002 IEEE Conference onDecision and Control. Shewas the recipient ofa NSF CAREER Award in 2007. For the paper ‘‘Motion coordination with DistributedInformation,’’ coauthored with Francesco Bullo and Jorge Cortes, she received the2008 Control Systems Magazine Outstanding Paper Award.