
Pfadverfolgung Von Normalformen zu prädiktiven Reglern · PDF fileNonlinear Model...
32
Timm Faulwasser Laboratoire d’Automatique, Ecole Polytechnique Fédérale de Lausanne Institut für Angewandte Informatik, Karlsruher Institut für Technologie Joint work with: Tobias Weber, Janine Matschek, Juan Pablo Zometa, Rolf Findeisen (OvGU MD) Sven Lorenz, Johann Dauer (DLR Braunschweig) Elgersburg Workshop | 11.02.2016 Pfadverfolgung – Von Normalformen zu prädiktiven Reglern
Transcript of Pfadverfolgung Von Normalformen zu prädiktiven Reglern · PDF fileNonlinear Model...
Timm Faulwasser Laboratoire d’Automatique, Ecole Polytechnique Fédérale de LausanneInstitut für Angewandte Informatik, Karlsruher Institut für Technologie
Joint work with: Tobias Weber, Janine Matschek, Juan Pablo Zometa, Rolf Findeisen (OvGU MD)Sven Lorenz, Johann Dauer (DLR Braunschweig)
Elgersburg Workshop | 11.02.2016
Pfadverfolgung –Von Normalformen zu prädiktiven Reglern
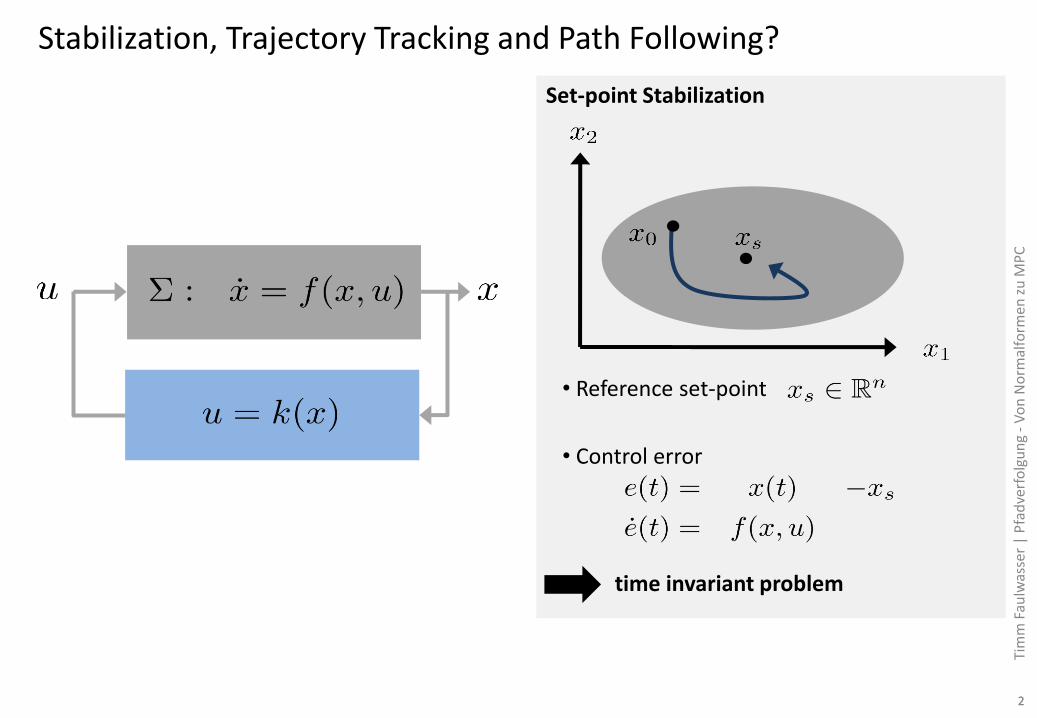
Stabilization, Trajectory Tracking and Path Following?
Set-point Stabilization
• Reference set-point
• Control error
time invariant problem
2
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
2
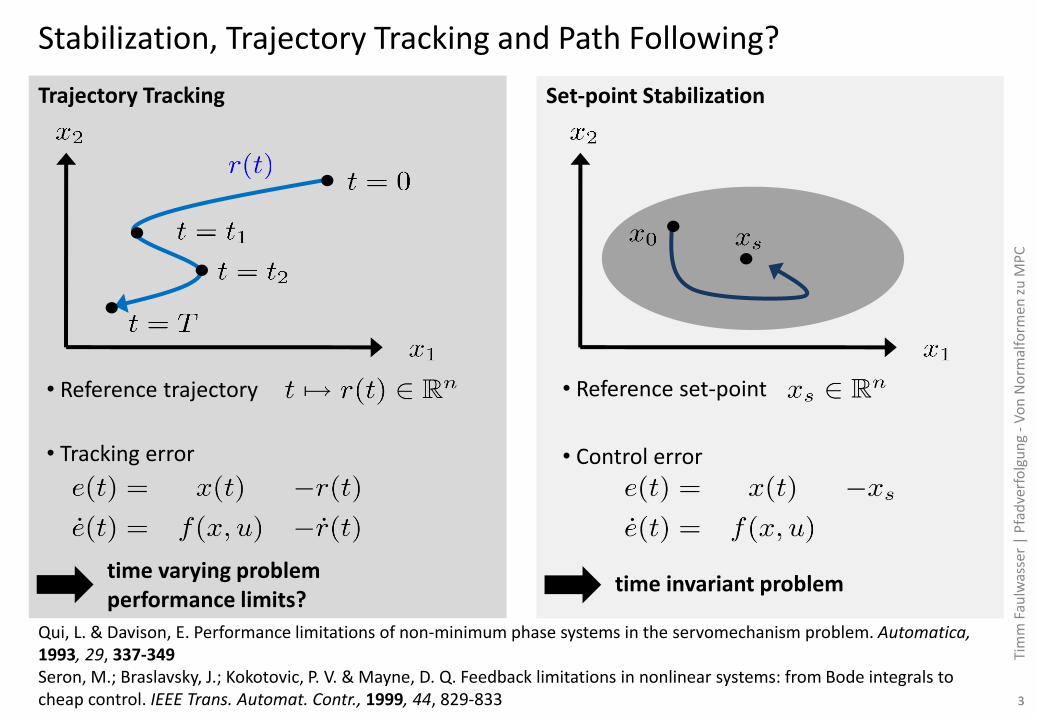
Stabilization, Trajectory Tracking and Path Following?
Set-point Stabilization
• Reference set-point
• Control error
time invariant problem
Trajectory Tracking
• Reference trajectory
• Tracking error
time varying problemperformance limits?
3
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Qui, L. & Davison, E. Performance limitations of non-minimum phase systems in the servomechanism problem. Automatica, 1993, 29, 337-349 Seron, M.; Braslavsky, J.; Kokotovic, P. V. & Mayne, D. Q. Feedback limitations in nonlinear systems: from Bode integrals tocheap control. IEEE Trans. Automat. Contr., 1999, 44, 829-833 3
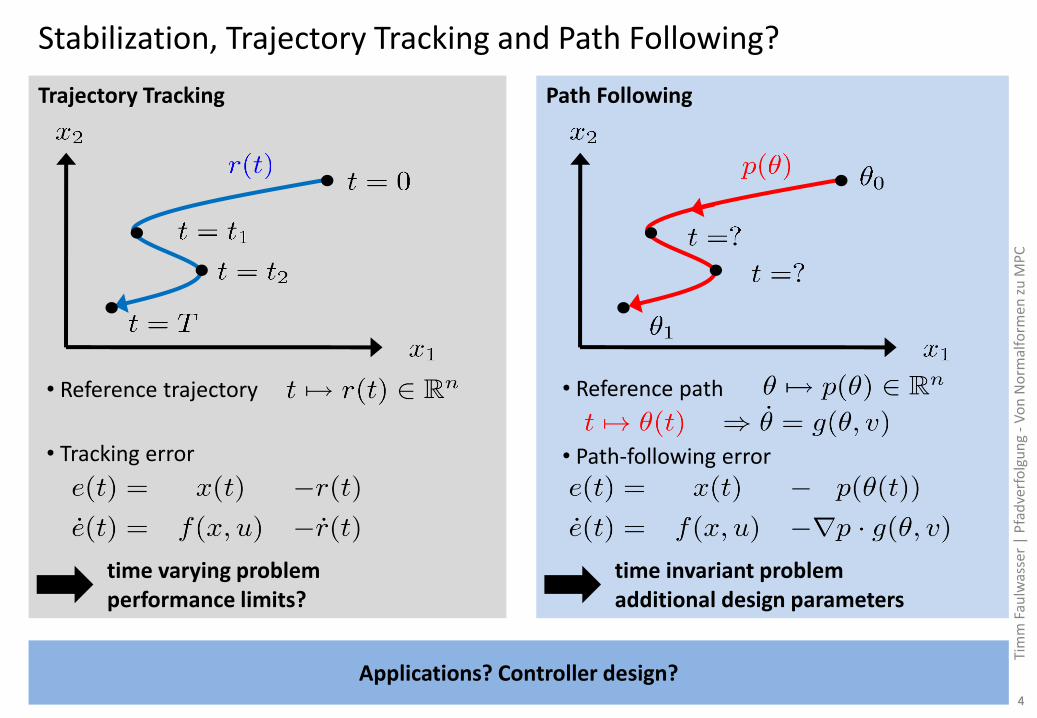
Stabilization, Trajectory Tracking and Path Following?
Applications? Controller design?
Trajectory Tracking
• Reference trajectory
• Tracking error
time varying problemperformance limits?
Path Following
• Reference path
• Path-following error
time invariant problemadditional design parameters
4
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
4
Path Following
Typical Applications
• Autonomous vehicles
• Machine tools
• Motion problems
• …
Problem definition? Controller design?
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
5
Outline
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Model Predictive Path Following Control• Convergence properties• MPFC for a robotic manipulator• Feedforward path following for an autonomous helicopter
Outlook and Summary
Path Following• Set-point stabilization, trajectory tracking and path following• Problem analysis: tailored normal forms• Path followability results• Examples• Feedforward path following and closed-loop path following
6
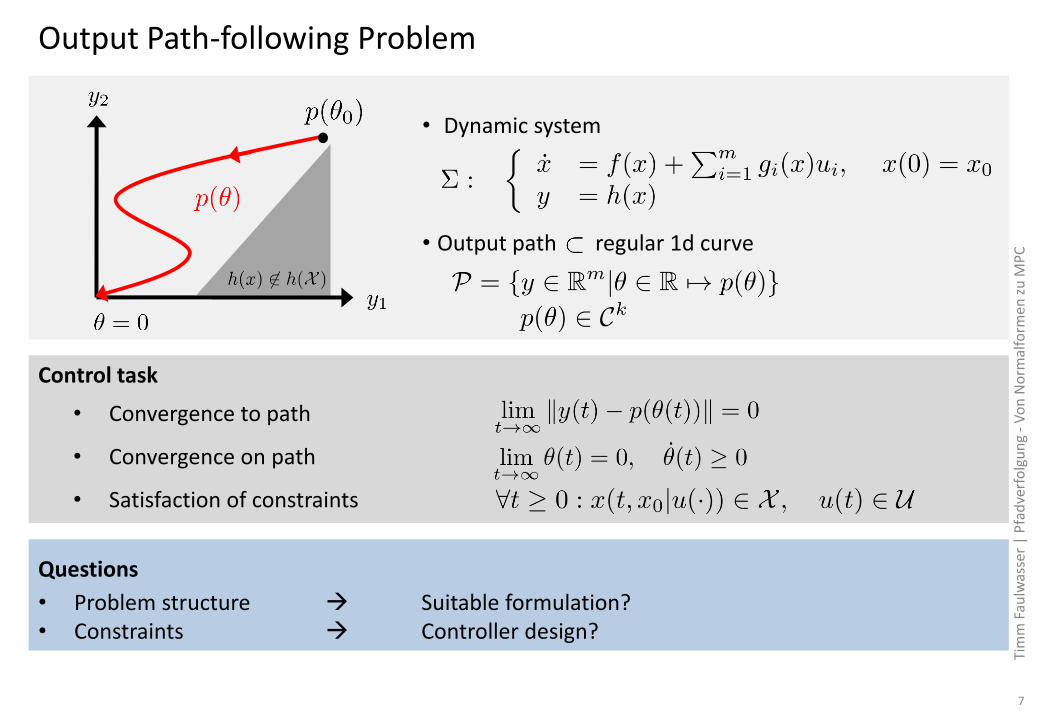
Output Path-following Problem
Control task
• Convergence to path
• Convergence on path
• Satisfaction of constraints
Questions
• Problem structure Suitable formulation?• Constraints Controller design?
• Dynamic system
• Output path regular 1d curve
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
7
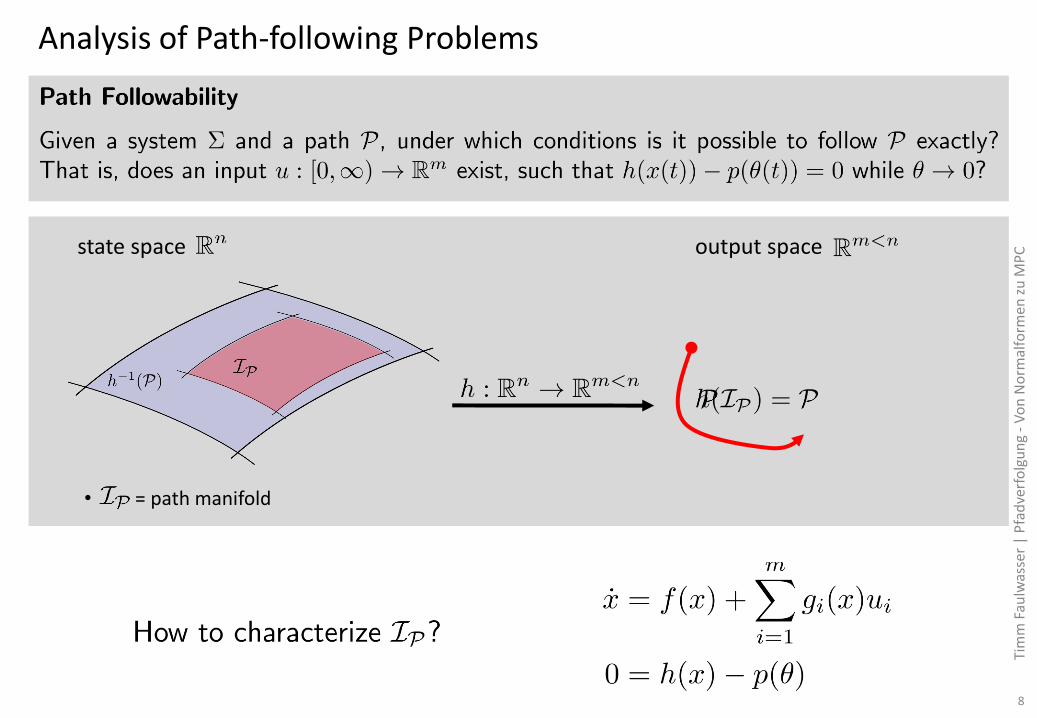
Analysis of Path-following Problems
state space output space
• = path manifold
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
8
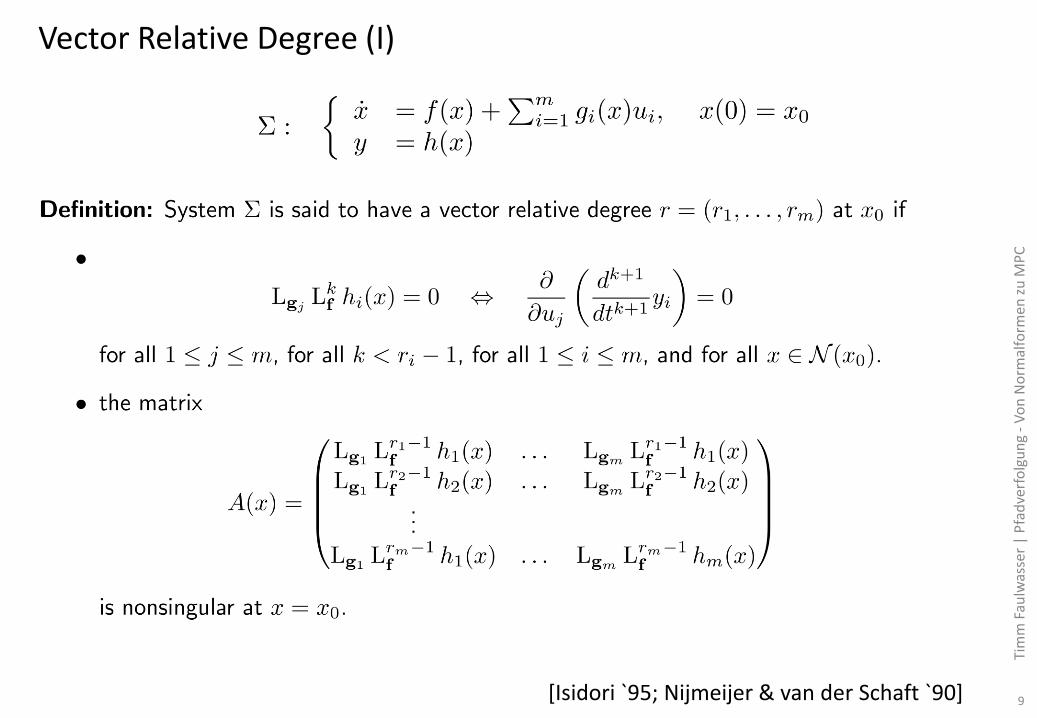
Vector Relative Degree (I)
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
[Isidori `95; Nijmeijer & van der Schaft `90] 9
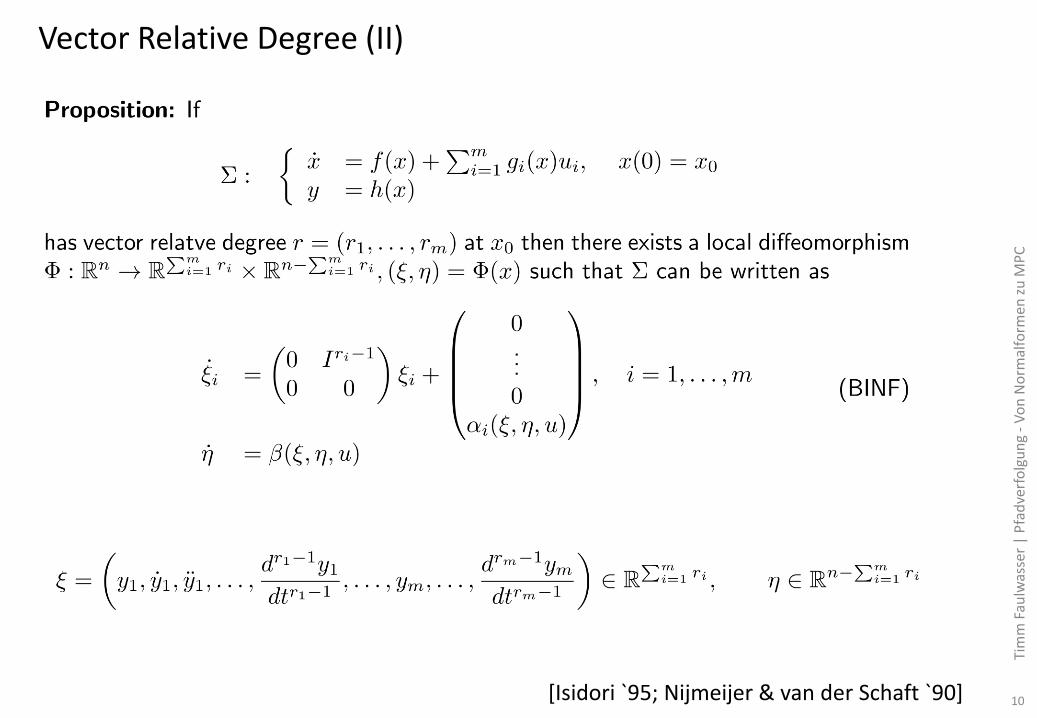
Vector Relative Degree (II)
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
[Isidori `95; Nijmeijer & van der Schaft `90] 10
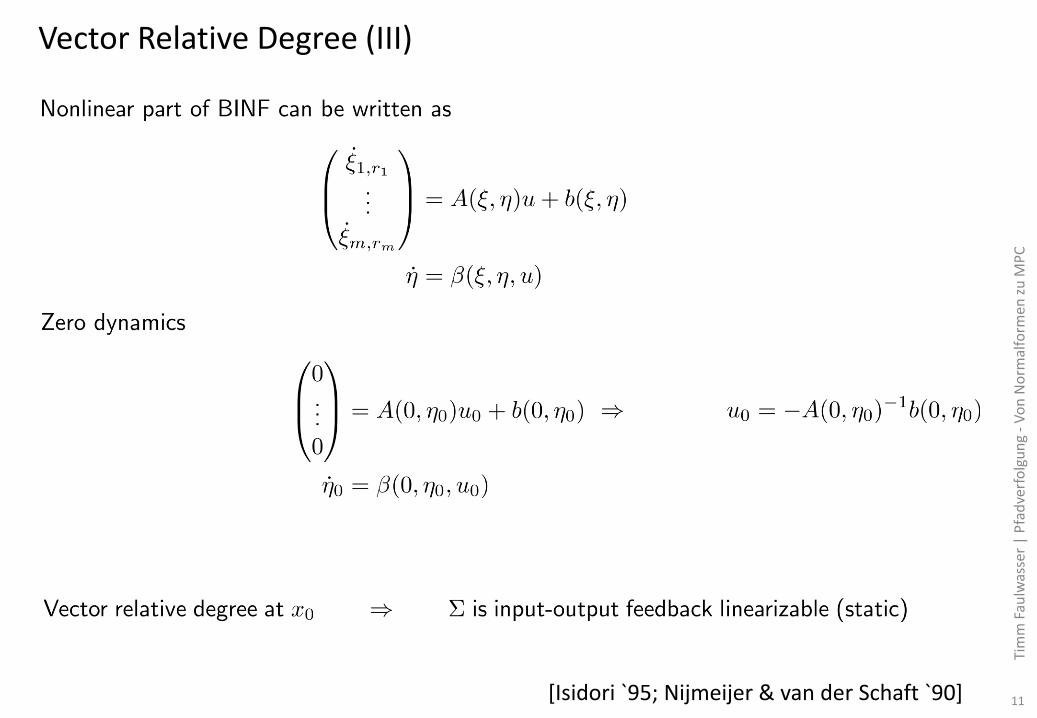
Vector Relative Degree (III)
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
[Isidori `95; Nijmeijer & van der Schaft `90] 11
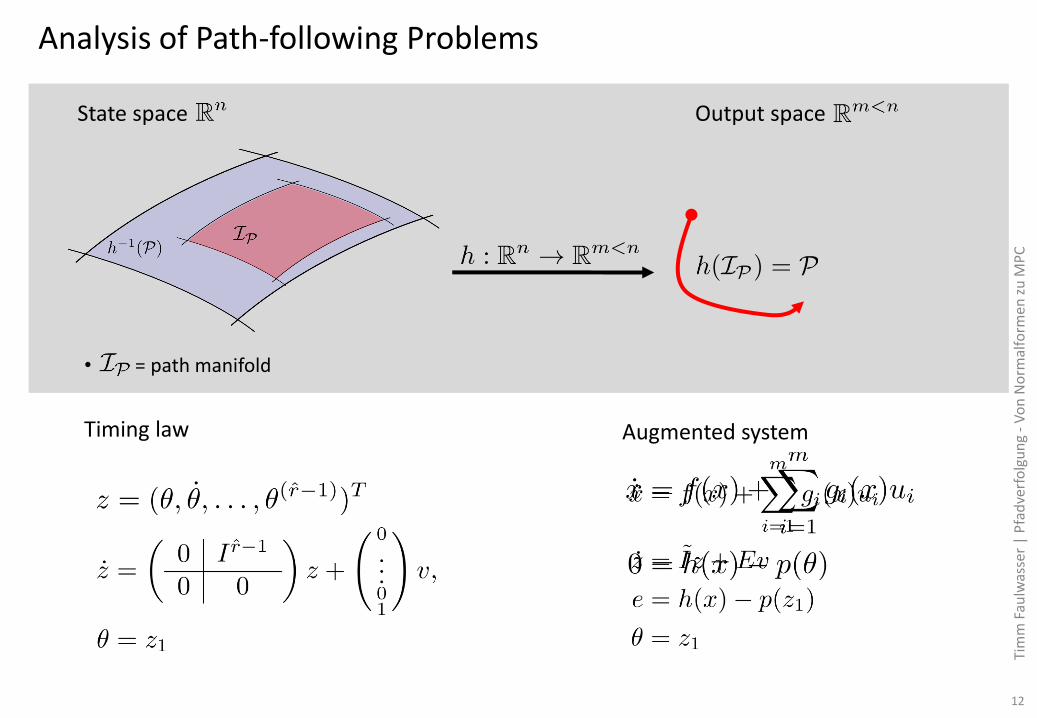
Analysis of Path-following Problems
State space Output space
• = path manifold
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Augmented systemTiming law
12
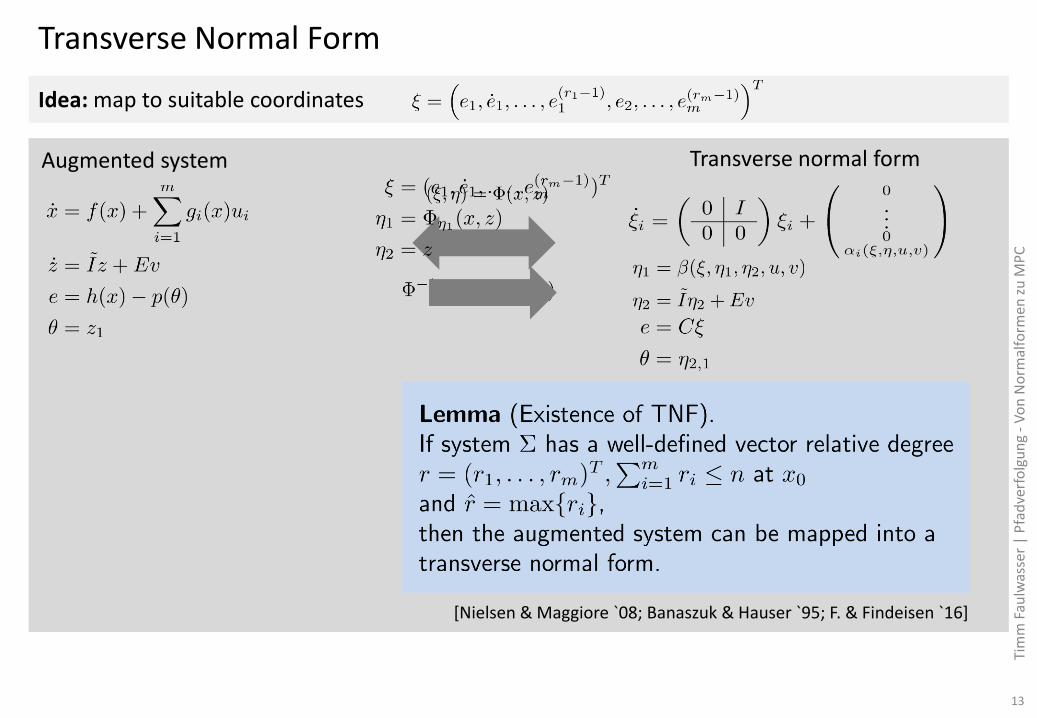
Idea: map to suitable coordinates
Transverse Normal Form
Augmented system Transverse normal form
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
[Nielsen & Maggiore `08; Banaszuk & Hauser `95; F. & Findeisen `16]
13
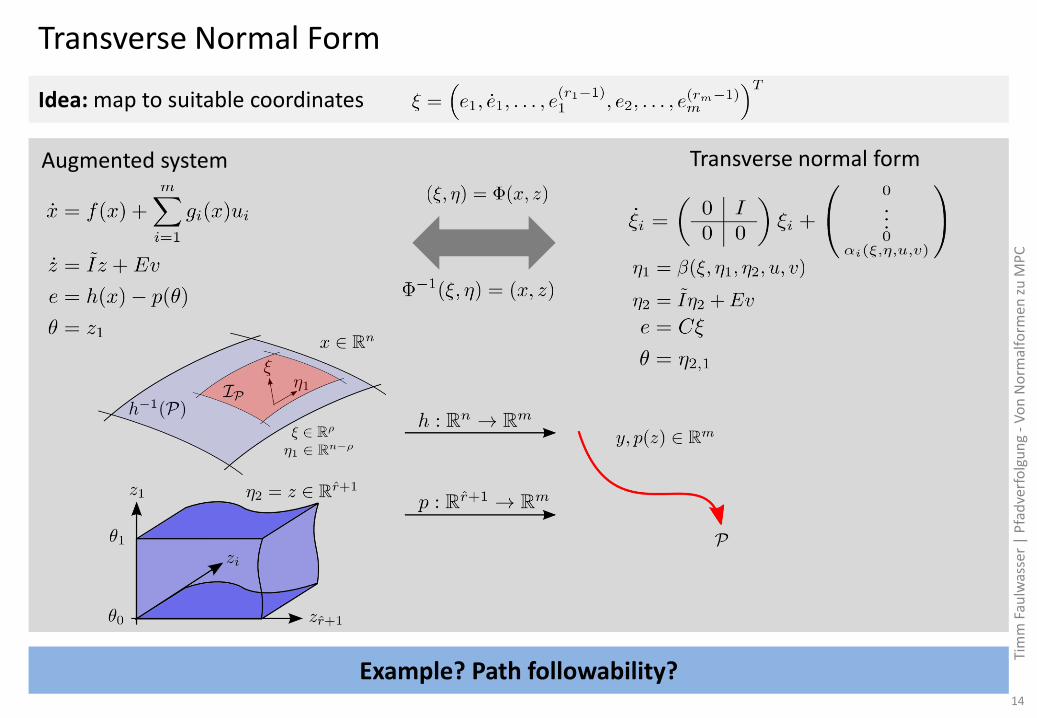
Idea: map to suitable coordinates
Transverse Normal Form
Augmented system Transverse normal form
Example? Path followability?
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
14
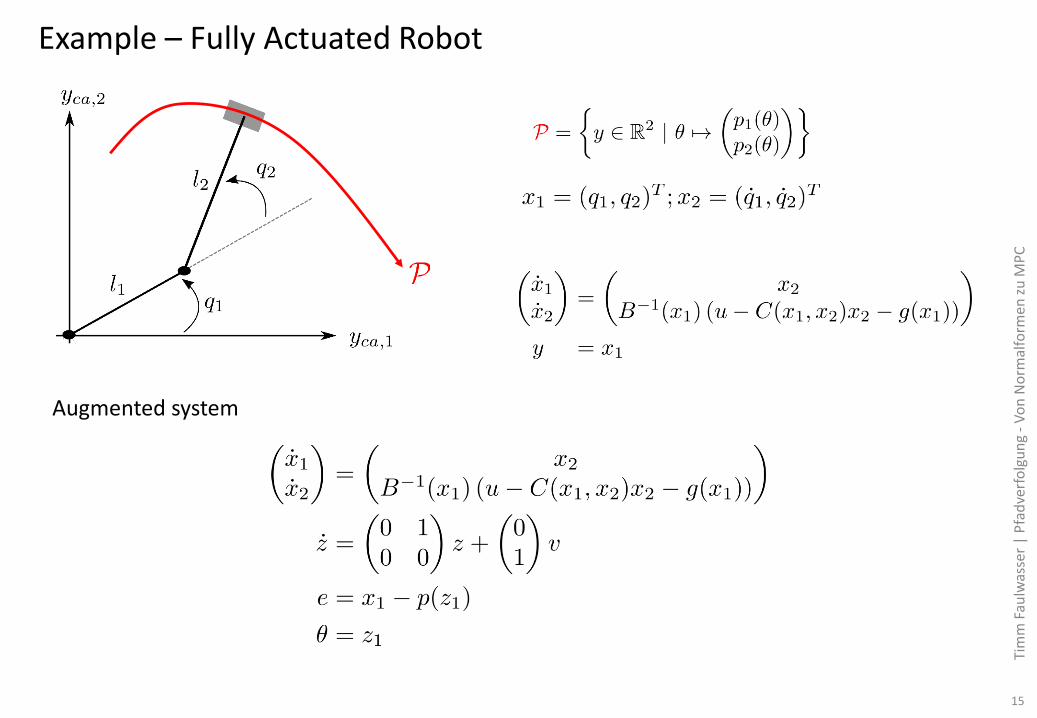
Example – Fully Actuated Robot
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Augmented system
15
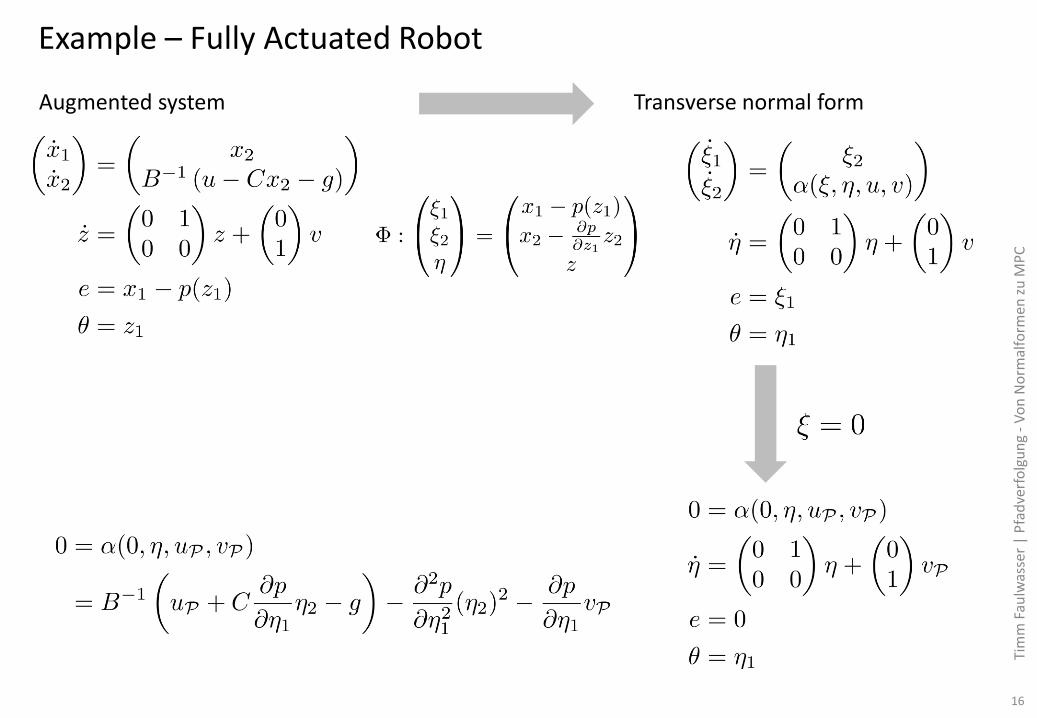
Example – Fully Actuated Robot
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Augmented system Transverse normal form
16
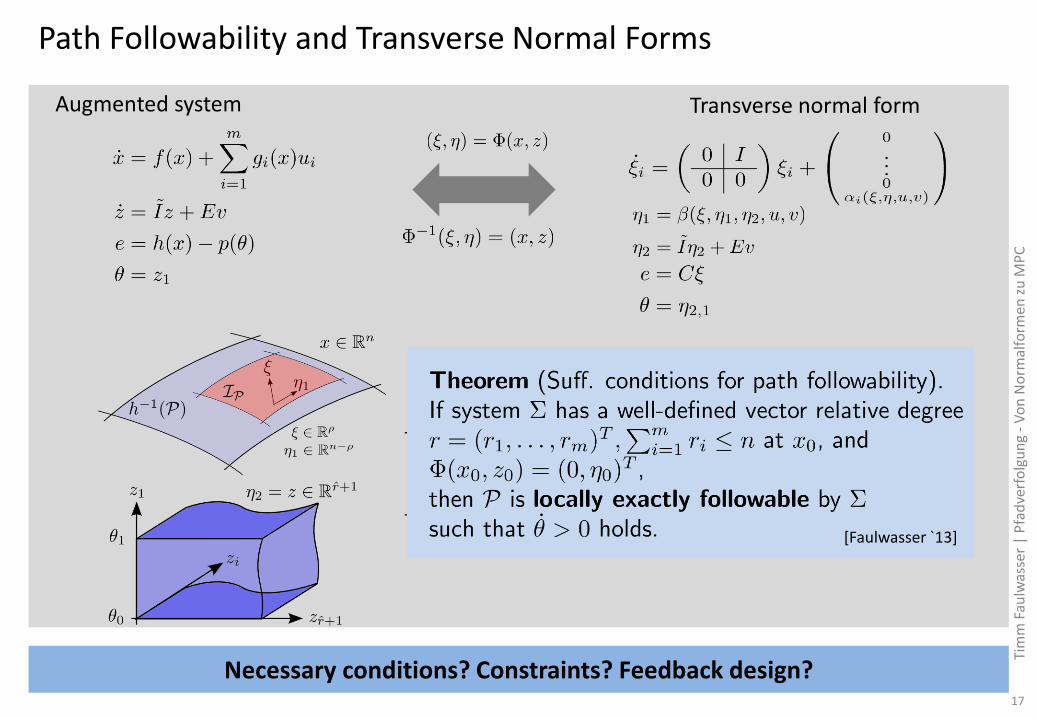
Path Followability and Transverse Normal Forms
Augmented system Transverse normal form
Necessary conditions? Constraints? Feedback design?
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
17
[Faulwasser `13]
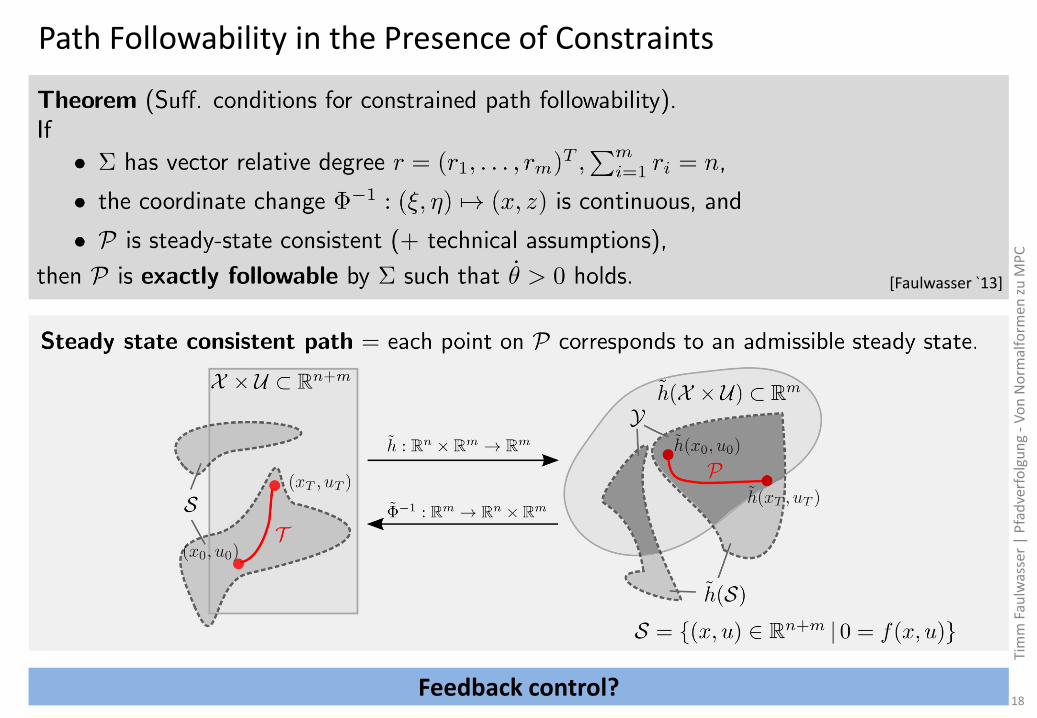
Path Followability in the Presence of Constraints
Feedback control?
[Faulwasser `13]
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
18
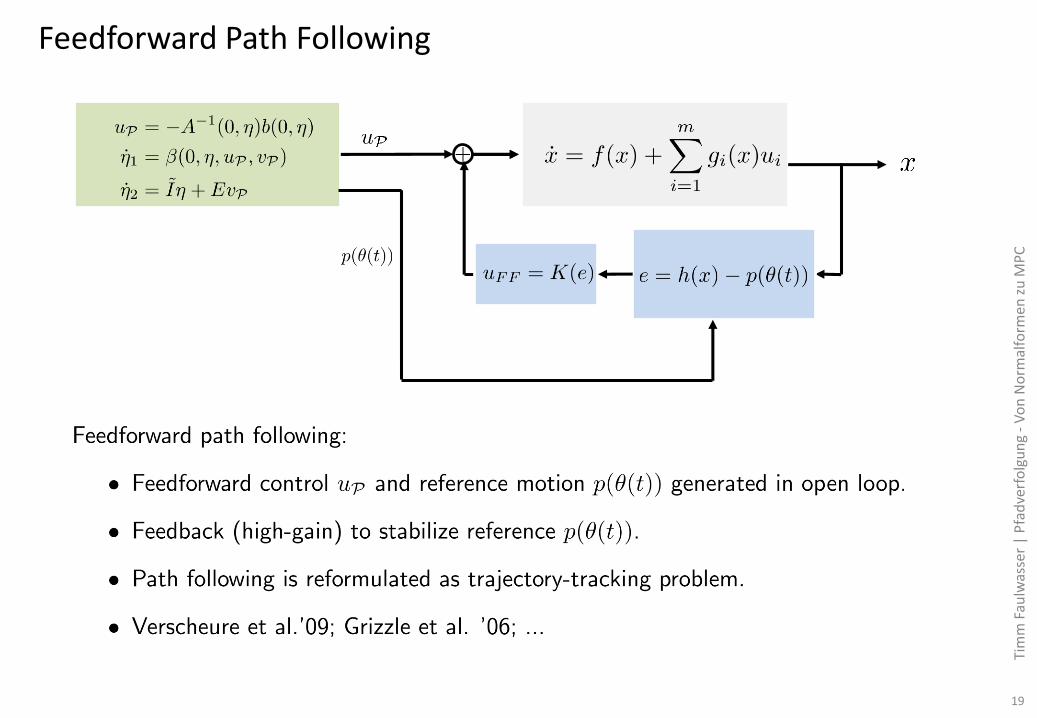
Feedforward Path Following
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
19
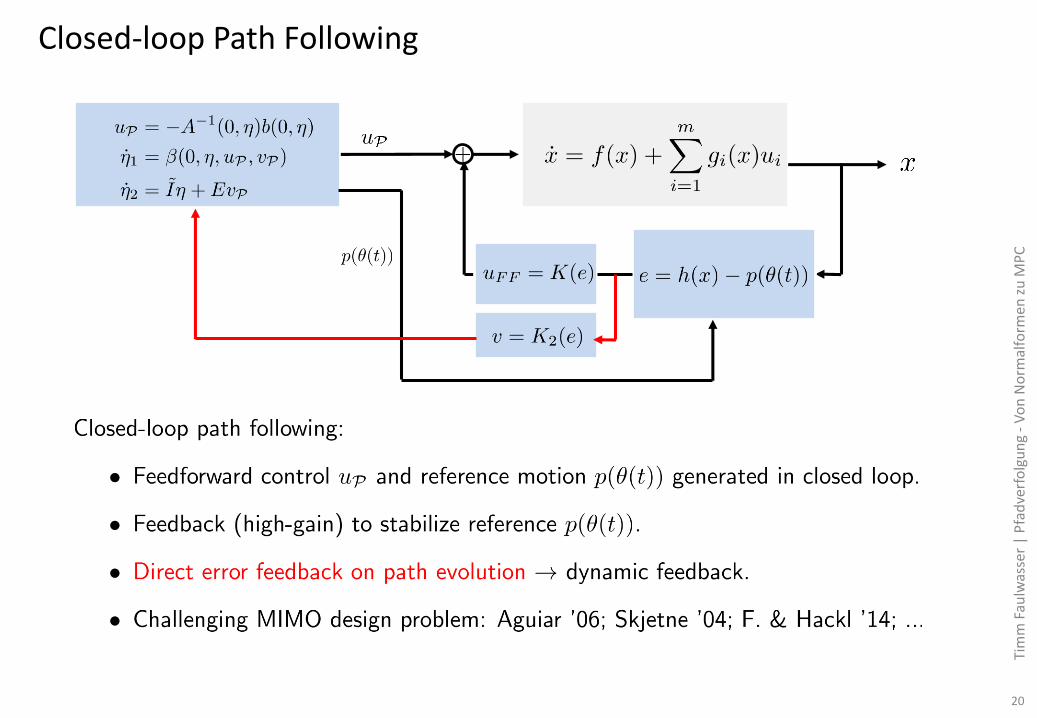
Closed-loop Path Following
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
20
Outline
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Model Predictive Path Following Control• Convergence properties• MPFC for a robotic manipulator• Feedforward path following for an autonomous helicopter
Outlook and Summary
Path Following• Set-point stabilization, trajectory tracking and path following• Problem analysis: tailored normal forms• Path followability results• Examples• Feedforward path following and closed-loop path following
21
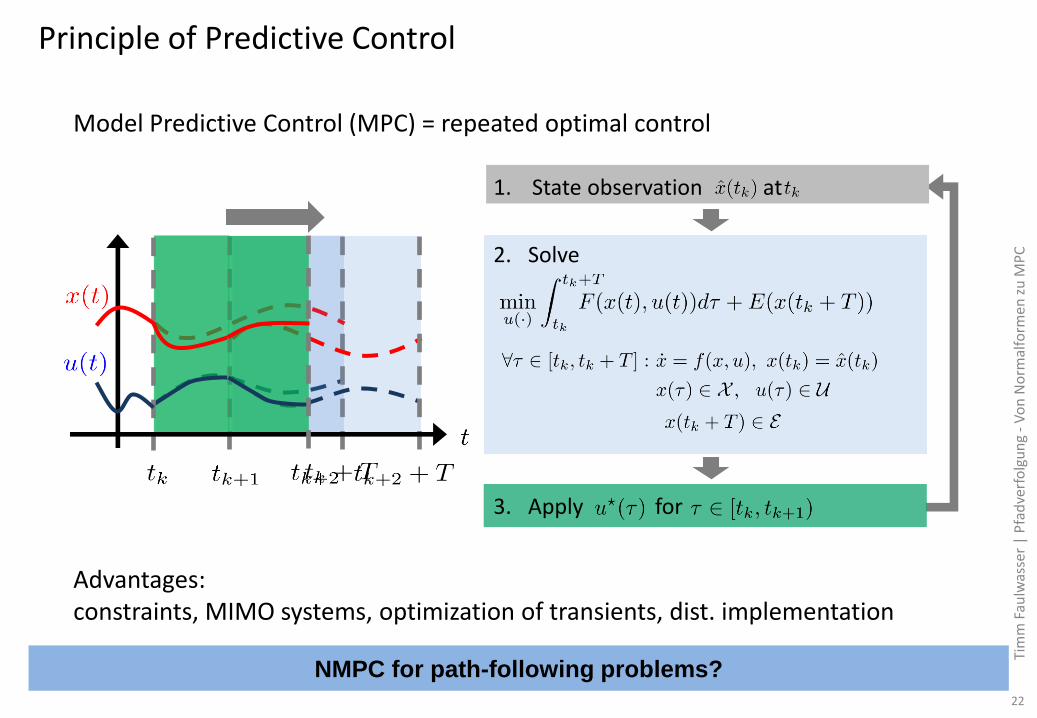
Principle of Predictive Control
NMPC for path-following problems?
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
22
Model Predictive Control (MPC) = repeated optimal control
Advantages: constraints, MIMO systems, optimization of transients, dist. implementation
1. State observation at
2. Solve
3. Apply for
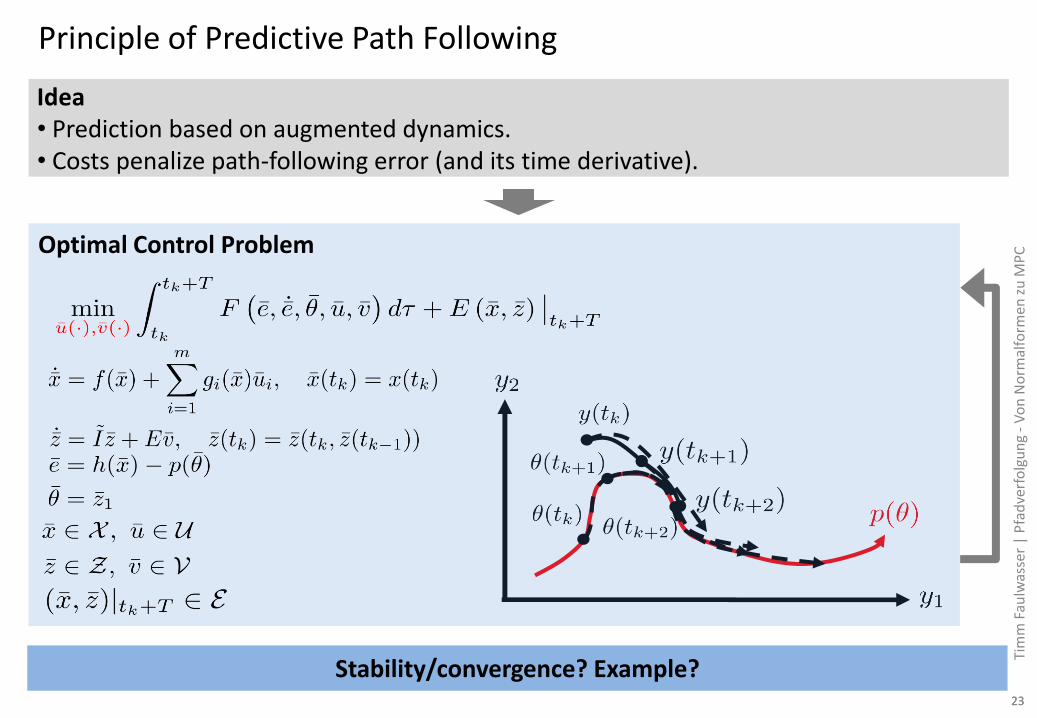
Principle of Predictive Path Following
Idea• Prediction based on augmented dynamics.• Costs penalize path-following error (and its time derivative).
Stability/convergence? Example?
Optimal Control Problem
23
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
23
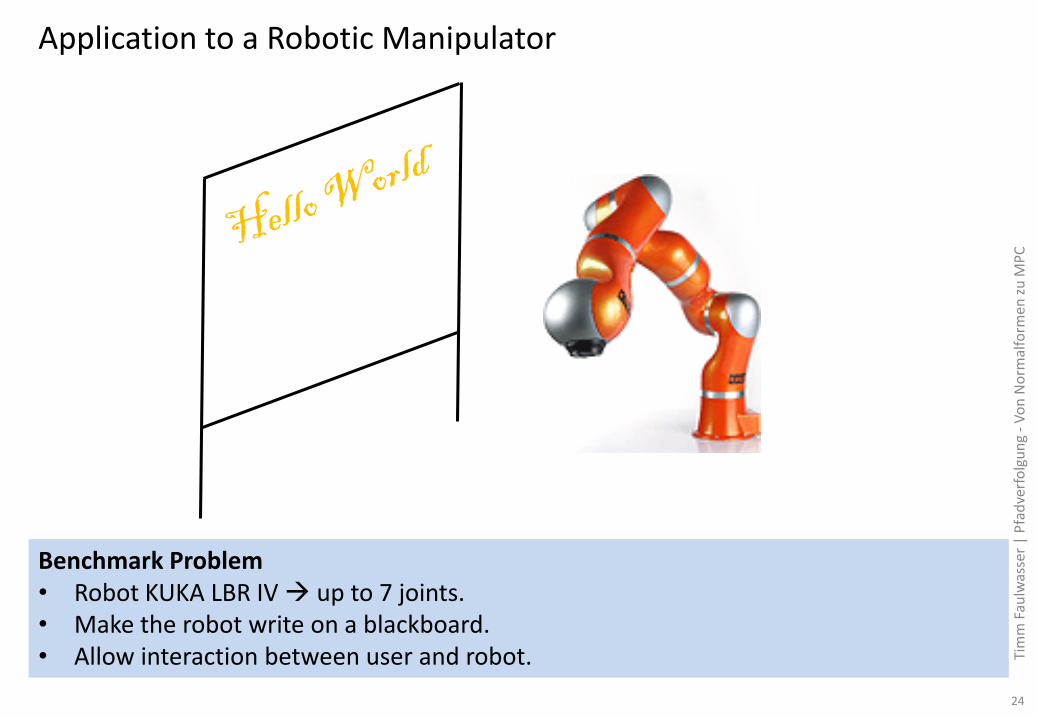
Application to a Robotic Manipulator
Benchmark Problem• Robot KUKA LBR IV up to 7 joints.• Make the robot write on a blackboard.• Allow interaction between user and robot. Ti
mm
Fau
lwas
ser
| P
fad
verf
olg
un
g -
Vo
n N
orm
alfo
rmen
zu
MP
C
24
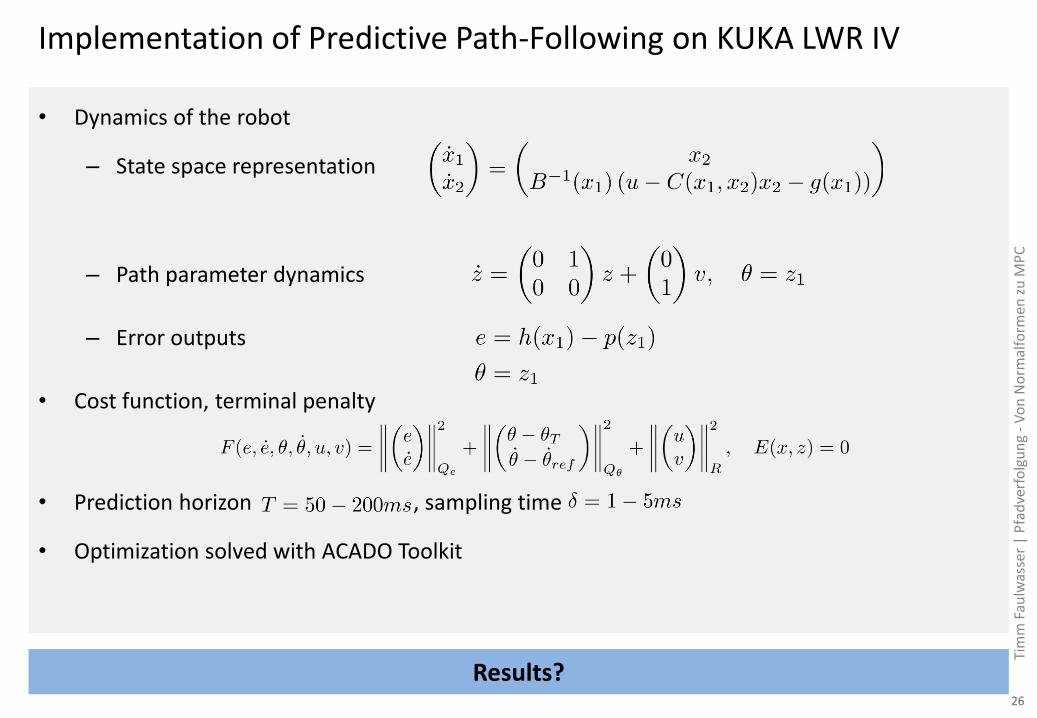
Implementation of Predictive Path-Following on KUKA LWR IV
• Dynamics of the robot
– State space representation
– Path parameter dynamics
– Error outputs
• Cost function, terminal penalty
• Prediction horizon , sampling time
• Optimization solved with ACADO Toolkit
Results?26
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
26

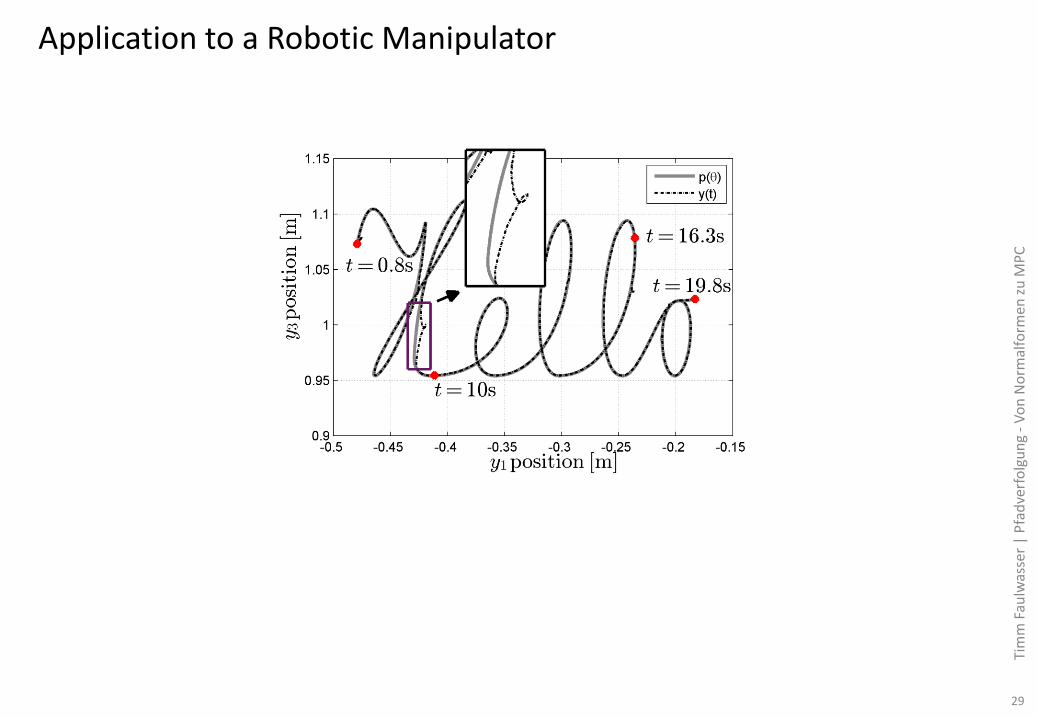
Application to a Robotic Manipulator
Joint work with: Juan P. Zometa, Janine Matschek, Tobias Weber, Rolf Findeisen (all OvG Magdeburg) [Faulwasser et al. `15]
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
27

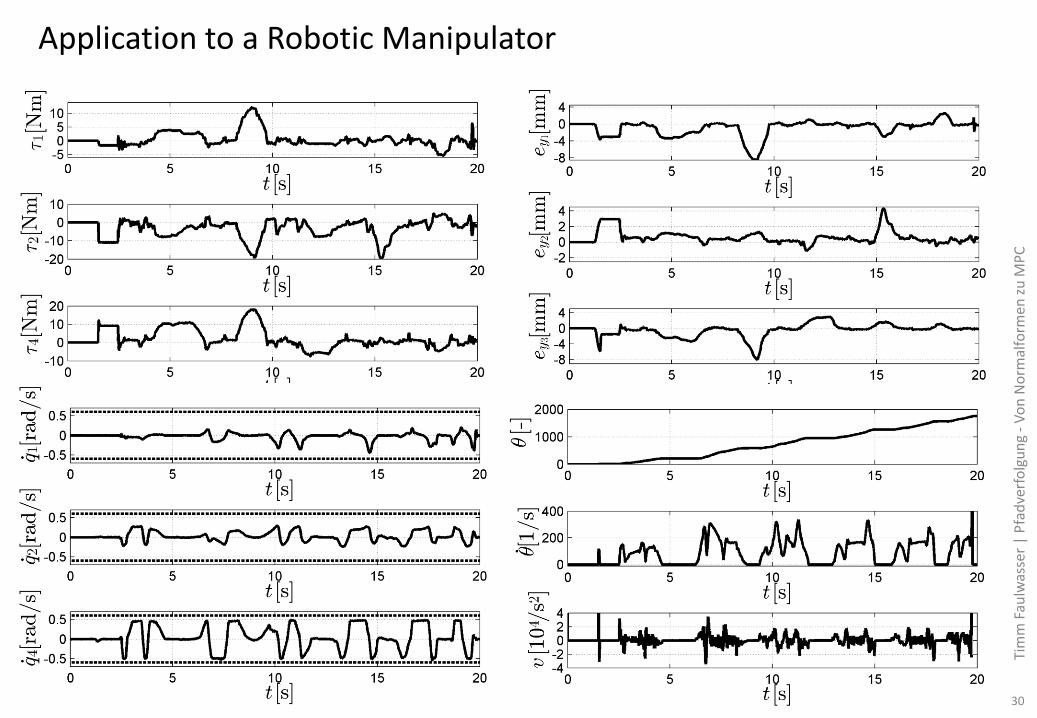
Application to a Robotic Manipulator
Joint work with: Juan P. Zometa, Janine Matschek, Tobias Weber, Rolf Findeisen (all OvG Magdeburg)
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
[Faulwasser et al. `15]
28
Application to a Robotic Manipulator
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
29
Application to a Robotic Manipulator
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
30
References
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
Lyapunov and back-stepping approaches to path following• Aguiar et al. (2005). Path-following for non minimumphase systems removes performanc e limitations. IEEE Transactions on
Automatic Control 50, 234-239.
• Dacic & Kokotovic (2006). Path-following for linear systems with unstable zero dynamics. Automatica 42, 1673-1683.
• Aguiar et al. (2008). Performance limitations in reference tracking and path-following for nonlinear systems. Automatica 44, 598-610.
• Skjetne et al. (2005). Robust output maneuvering for a class of nonlinear systems. Automatica 40, 373-383.
• Do & Pan (2006). Global robust adaptive path followng of underactuated ships. Automatica 42, 1713-1722.
• ...
Differential geometric reformulation• Banaszuk & Hauser (1995). Feedback linearization of transverse dynamics for periodic orbits
Sys. Contr. Lett., 26, 95-105.
• Nielsen & Maggiore (2008). On local transverse feedback linearization. SIAM Journal on Control and Optimization, 47, 2227-2250.
• Faulwasser (2013). Optimization-based Solutions to Constrained Trajectory-tracking and Path-following Problems. Shaker, Aachen, Germany.
• …
Feedforward path following• Shin & McKay (1985). Minimum-time control of robotic manipulators with geometric path constraints
IEEE Trans. Automat. Contr., 30, 531 – 541.
• Verscheure et al. (2009). Time-Optimal Path Tracking for Robots: A Convex Optimization Approach.IEEE Trans. Autom. Contr., 54, 2318-2327.
• Faulwasser, Hagenmeyer & Findeisen (2011). Optimal Exact Path-Following for Constrained Differentially Flat Systems. Proc. of 18th IFAC World Congress, pp. 9875–9880.
• Faulwasser, Hagenmeyer & Findeisen (2014). Constrained Reachability and Trajectory Generation for Flat Systems. Automatica, vol. 50, pp. 1151-1159.
31
ReferencesPredictive control for path following (theory)• Faulwasser & Findeisen (2008). Nonlinear model predictive path-following control. Proc. of Workshop Future Directions of
Nonlinear Model Predictive Control, Pavia, Italy.• Faulwasser, Kern & Findeisen (2009). Model predictive path-following for constrained nonlinear systems. Proc. of 48th IEEE
Conference on Decision and Control, pp. 8642-8647.
• Faulwasser & Findeisen (2016). Nonlinear Model Predictive Control for Constrained Output Path Following. IEEE Trans. Automatic Control.
• Faulwasser (2013). Optimization-based Solutions to Constrained Trajectory-tracking and Path-following Problems. Shaker, Aachen, Germany.
Predictive control for path following (applications)
• Faulwasser et al. (2013). Predictive Path-following Control: Concept and Implementation for an Industrial Robot. Proc. of IEEE Conference on Control Applications (CCA), pp. 128-133.
• Dauer et al. (2013). Optimization-based Feedforward Path Following for Model Reference Adaptive Control of an Unmanned Helicopter. Proc. of AIAA Guidance, Navigation and Control Conference.
• Lam et al. (2013). Model predictive contouring control for biaxial systems. IEEE Trans. Contr. Syst. Techn., 21, 552-559.
• Böck & Kugi (2014). Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower CraneIEEE Trans. Contr. Syst. Techn., 22, 1461-1473.
• Faulwasser et al. (2015). Implementation of Constrained Nonlinear Model Predictive Path-Following Control for an Industrial Robot. Submitted to IEEE Trans. Contr. Syst. Techn.
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
32
Summary and Conclusion
Summary
• Path following: combines trajectory generation and tracking
• Typical applications of path following: autonomous vehicles & robots, machine tools, …
• Tailored Byrnes-Isidori Normal Form is the key step for analysis
• MPC can be used to tackle path-following problems
Open questions
• Combination of path following and force control?
• Model uncertainty and repetitive motions?
• Implication of exo-systems with inputs for regulator problems?
• …
Thanks to: • Juan Pablo Zometa, Tobias Weber, Janine Matschek, Rolf Findeisen (OvG University Magdeburg)• Johann Dauer, Sven Lorenz (DLR Braunschweig)
33
Tim
m F
aulw
asse
r |
Pfa
dve
rfo
lgu
ng
-V
on
No
rmal
form
en z
u M
PC
33


















