N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009 Slide 1 Spatial Dynamics,...
21
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009 Slide 1 Spatial Dynamics, Information Flow and Collective Behavior Naomi Ehrich Leonard Mechanical & Aerospace Engineering Princeton University naomi@princeton . edu www. princeton . edu/~naomi
-
Upload
reynold-david-skinner -
Category
Documents
-
view
214 -
download
0
Transcript of N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009 Slide 1 Spatial Dynamics,...
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 1
Spatial Dynamics, Information Flow and Collective Behavior
Naomi Ehrich LeonardMechanical & Aerospace Engineering
Princeton [email protected]
www.princeton.edu/~naomi

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 2
Observing Fish Schooling
QuickTime™ and aDivX 5.0 decompressor
are needed to see this picture.
with Iain Couzin, Dan Swain, Christos Ioannou, Yael Katz

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 3
Robot/Fish Hybrid Experiment
QuickTime™ and aH.264 decompressor
are needed to see this picture.
Replica fish use real-time feedback control
Replica Fish
Real Fish
Camera
Robot with magnets
Bluetooth Link
Tracking/Control Workstation
Replica fish leading real fish (Jens Krause, Univ. Leeds).
Replica predator approaching real fish.
Replica and real fish
with Iain Couzin, Dan Swain, Christos Ioannou, Yael Katz

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 4
Observations of Fish with Oscillating Speed
Data:Iain Couzin (Princeton) Albert Kao (Harvard)
2.0 meters
4.5 cm
Banded killifish
Data processing: with Dan Swain
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 5
Observed 2-Fish School Trajectories
QuickTime™ and a decompressor
are needed to see this picture.

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 6
Analysis of Killifish DataSubtract mean speed. Take Hilbert transform to get analytic signal.Magnitude of analytic signal.Phase of analytic signal.
Least square fit
Sinusoidal fit
Same frequency for each fish!
Best fit frequency = 3.58 rad/sec = 0.57 HzRelative phase = 3.295 = 1.05*pi

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 7
Goal
Use formal models to analytically investigate the coupling of spatial dynamics, information flow and decision-making dynamics in fish schools.
What is the influence on speed, accuracy, robustness of collective decision-making?
Are there classes of information flow patterns (spatial patterns) that yield “better” decision-making?
Is periodically time-varying information flow (spatial dynamics) advantageous?
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 8
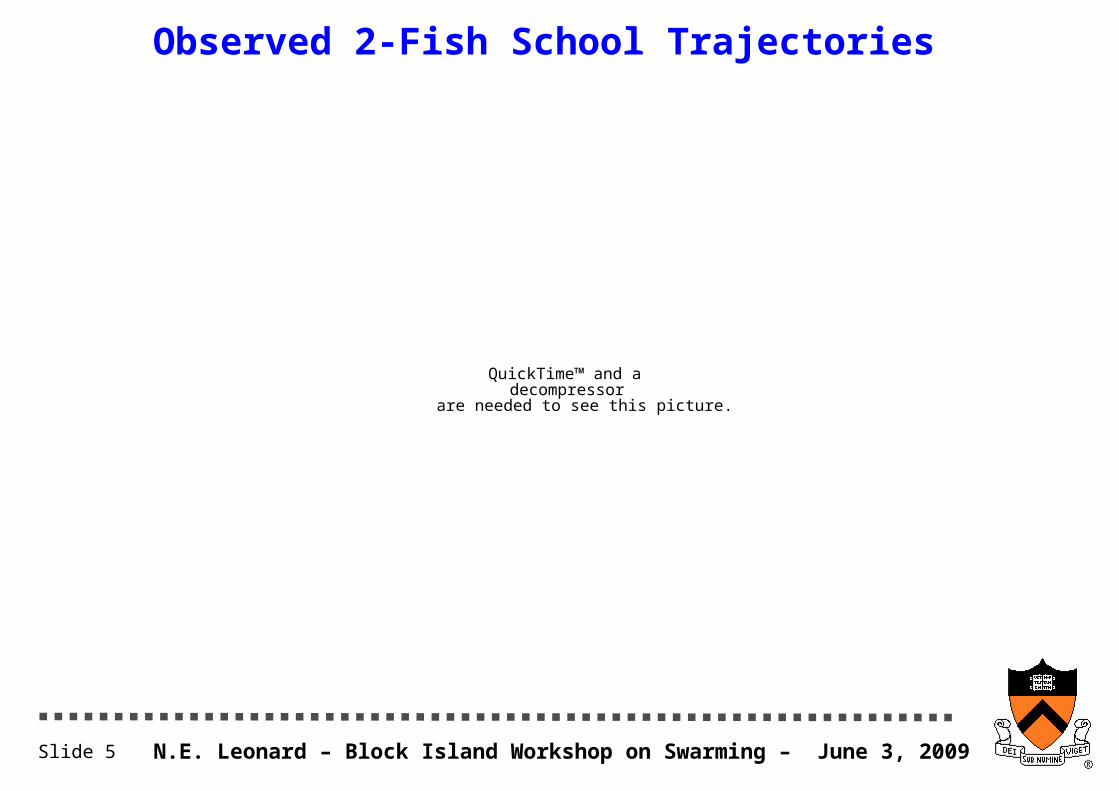
Spatial Dynamics of Agents with Oscillatory Speed
Steering control
Speed phase controlE.g.,
Extend model of Justh and Krishnaprasad.
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 9
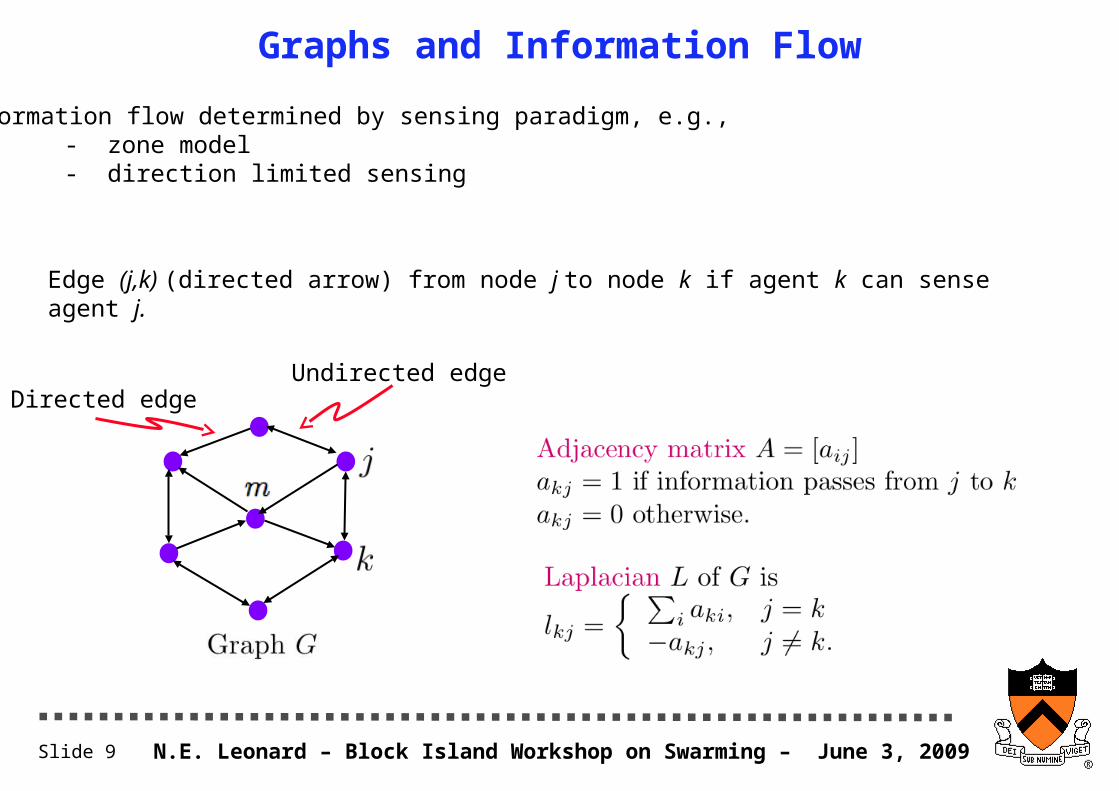
Graphs and Information Flow
Edge (j,k) (directed arrow) from node j to node k if agent k can sense agent j.
Undirected edgeDirected edge
Information flow determined by sensing paradigm, e.g., - zone model - direction limited sensing

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 10
Controlled Spatial Dynamics with Oscillatory Speed
Two sets of coupled oscillator dynamics
For example:

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 11
QuickTime™ and a decompressor
are needed to see this picture.
Circular Patterns with Oscillating Speed
Prove convergence to these circular patterns with feedback term, depending only on relative measurements, to synchronize instantaneous circle centers
Swain, Leonard, Couzin, Kao, Sepulchre, CDC ‘07Swain and Leonard, ACC ‘09

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 12
Effective Sensing Region
Periodically time-varying graph makes analysis tractable:Using effective sensing region compute union of edges over a period to get time-invariant graph. Study collective decision-making dynamics:
Swain, Cao, Leonard, CDC ‘08
Specializes to consensus dynamics if:
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 13
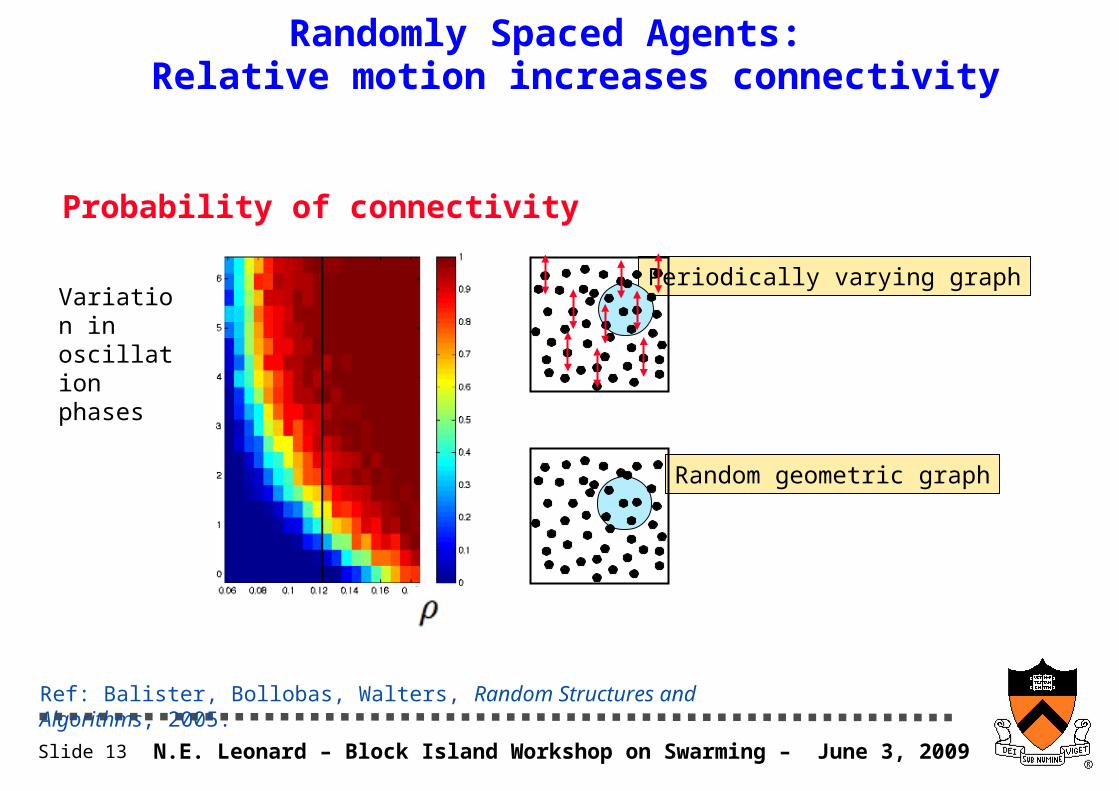
Randomly Spaced Agents: Relative motion increases connectivity
Random geometric graph
Periodically varying graphVariation in oscillation phases
Ref: Balister, Bollobas, Walters, Random Structures and Algorithms, 2005.
Variation in oscillation phases
Probability of connectivity

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 14
Regularly Spaced Agents:Relative motion increases connectivity
Consensus convergence rate maximal when relative phase of speed oscillations is
σσ
Consider consensus dynamics under this periodically time-varying sensing topology:

N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 15
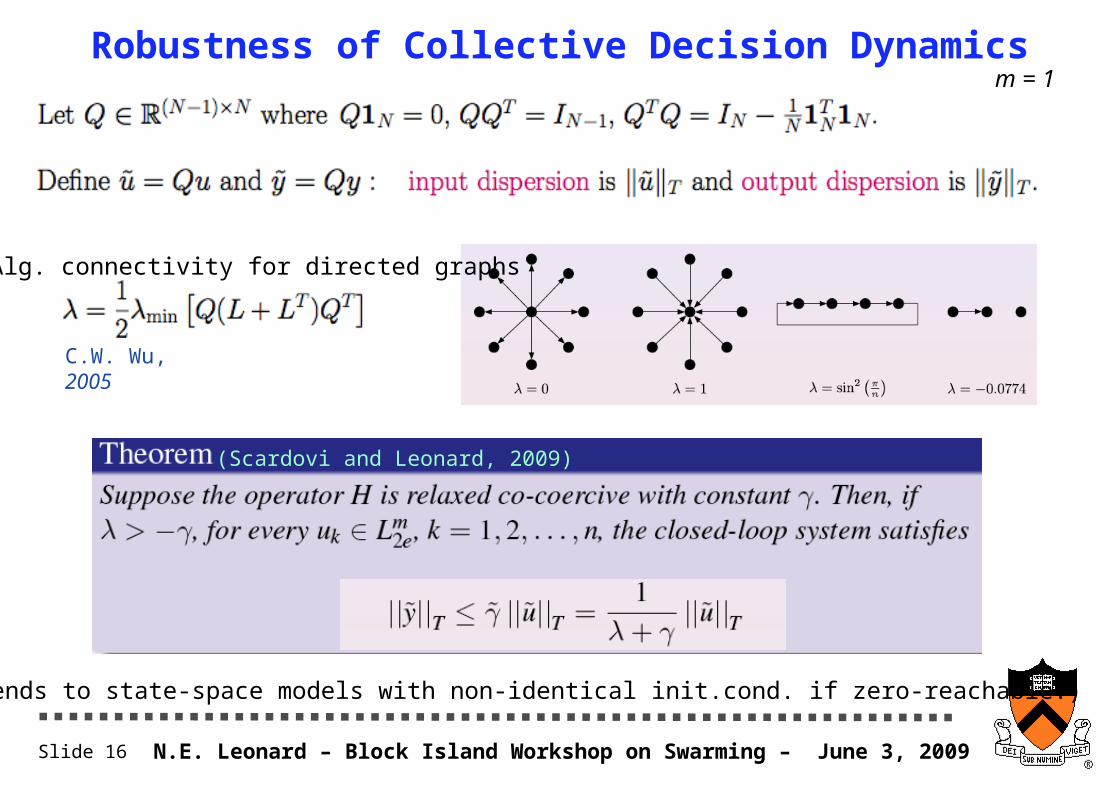
Robustness of Collective Decision Dynamics
N identical systems with heterogeneous external inputs and coupling defined by Laplacian L:
with Luca Scardovi
R.U. Verma, 2006
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 16
Robustness of Collective Decision Dynamicsm = 1
C.W. Wu, 2005
Alg. connectivity for directed graphs
(Scardovi and Leonard, 2009)
(Extends to state-space models with non-identical init.cond. if zero-reachable.)
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 17
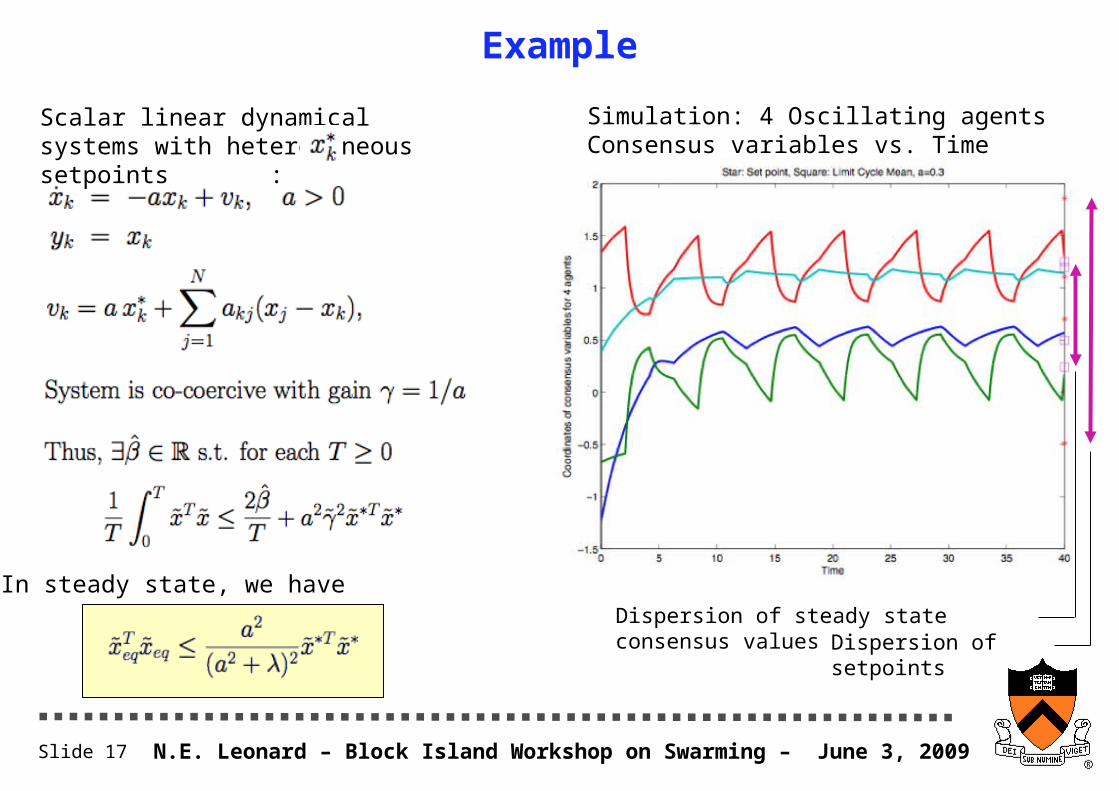
Example
Dispersion of setpoints Dispersion of steady state consensus values
Simulation: 4 Oscillating agents Consensus variables vs. Time
Scalar linear dynamical systems with heterogeneous setpoints :
In steady state, we have
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 18
Final RemarksOngoing development of to understand and exploit influence of coupling of spatial dynamics, information flow on collective behavior and decision-making dynamics.
Tie in with recent work on dynamics/leadership in swarms with heterogeneous information (micro-groups)(Nabet, Leonard, Couzin, Levin, J. Nonlinear Science, 2009)
New hybrid fish/robot test-bed for further integrated behavioral investigation with controlled experiments (joint with Iain Couzin).
Collective decision dynamics in teams of humans and robots (AFOSR MURI).
QuickTime™ and aH.264 decompressor
are needed to see this picture.
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 19
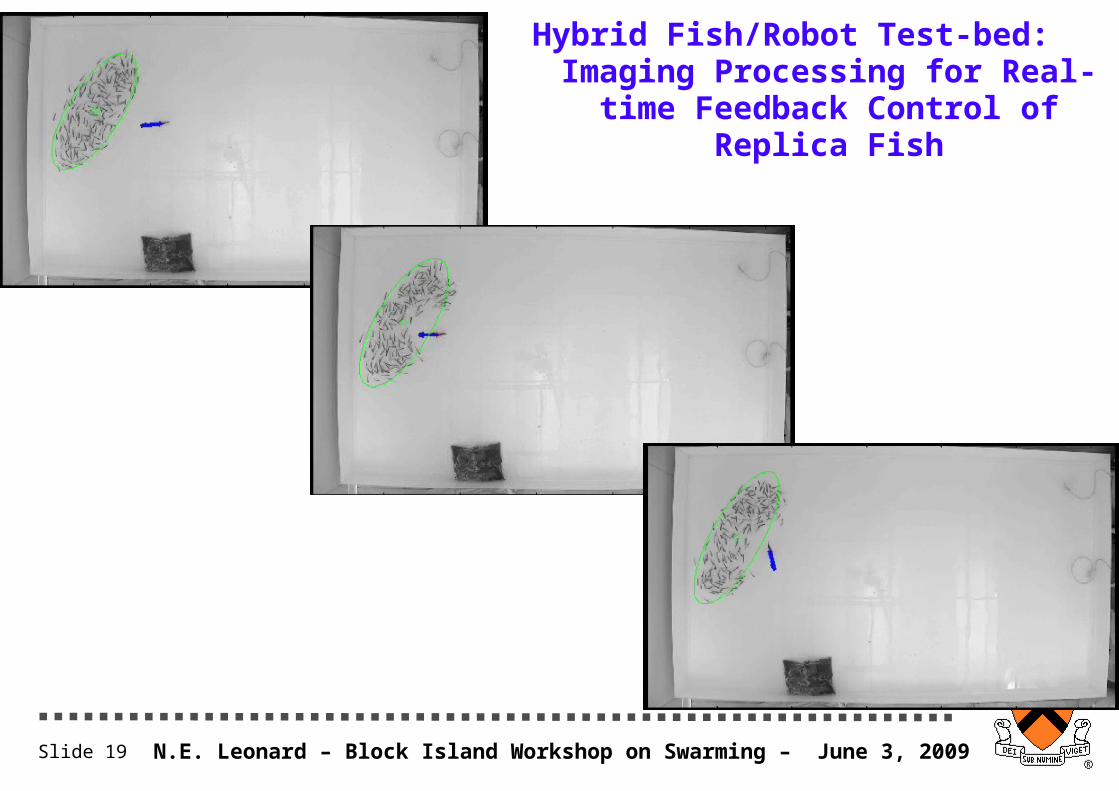
Hybrid Fish/Robot Test-bed: Imaging Processing for Real-time Feedback Control of Replica Fish
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 20
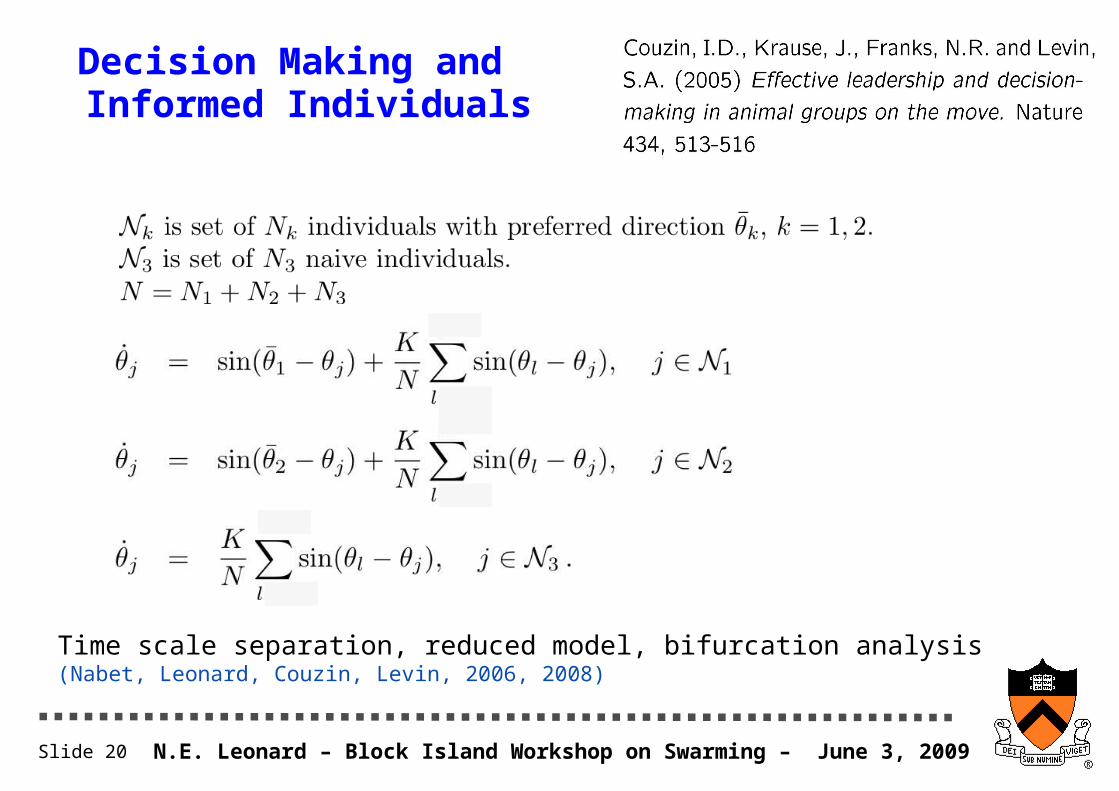
Decision Making and Informed Individuals
Time scale separation, reduced model, bifurcation analysis (Nabet, Leonard, Couzin, Levin, 2006, 2008)
N.E. Leonard – Block Island Workshop on Swarming – June 3, 2009Slide 21
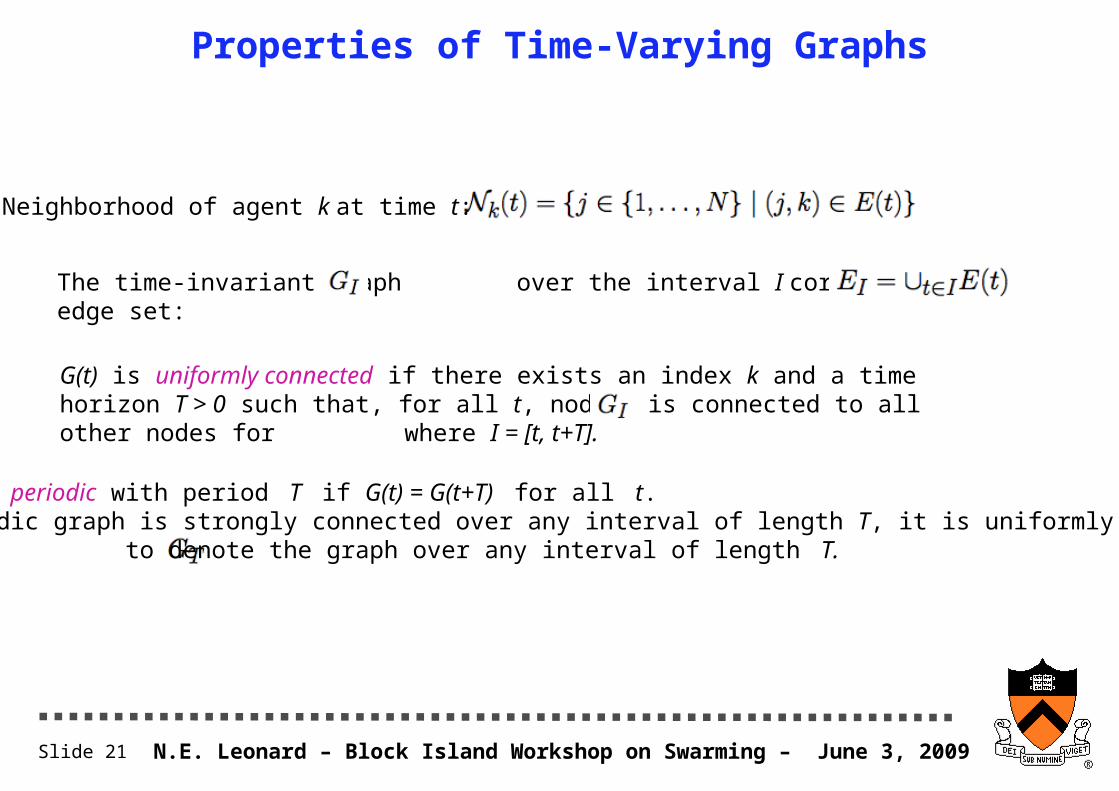
Properties of Time-Varying Graphs
Neighborhood of agent k at time t:
The time-invariant graph over the interval I corresponds to edge set:
G(t) is uniformly connected if there exists an index k and a time horizon T > 0 such that, for all t, node k is connected to all other nodes for where I = [t, t+T].
A graph is periodic with period T if G(t) = G(t+T) for all t.If a periodic graph is strongly connected over any interval of length T, it is uniformly connected.We write to denote the graph over any interval of length T.


















