N PHYSICA - University of California,...
30
N ELSEVIER Physica D 113 (1998) 43-72 PHYSICA Convective and absolute instabilities of fluid flows in finite geometry S.M. Tobias a,b,,, M.R.E. Proctor a, E. Knobloch b a Department of Applied Mathematics and Theoretical Physics, University of Cambridge, Cambridge CB3 9EW, UK b JILA, University of Colorado, Boulder, CO 80309, USA Received 13 January 1997; received in revised form 18 May 1997; accepted 29 May 1997 Communicated by J.D. Meiss Abstract Dynamics of linear and nonlinear waves in driven dissipative systems in finite domains are considered. In many cases (for example, due to rotation) the waves travel preferentially in one direction. Such waves cannot be reflected from boundaries. As a consequence in the convectively unstable regime the waves ultimately decay; only when the threshold for absolute instability is exceeded can the waves be maintained against dissipation at the boundary. Secondary absolute instabilities are associated with the break-up of a wave train into adjacent wave trains with different frequencies, wave numbers and amplitudes, separated by a front. The process of frequency selection is discussed in detail, and the selected frequency is shown to determine the wave number and amplitude of the wave trains. The results are described using the complex Ginzburg-Landau equation and illustrated using a mean-field dynamo model of magnetic field generation in the Sun. PACS: 05.45; 47.20.K; 47.32; 47.54; 95.30.Q Keywords: Hydrodynamic instabilities; Complex Ginzburg-Landau equation; Front formation 1. Introduction The distinction between convective and absolute instabilities is of vital importance in studies of open flows [17]. Briefly, an instability is called convective if it is advected downstream so that at any fixed location in the laboratory frame a perturbation decays asymptotically to zero. In contrast when the instability is absolute it grows at every point in the laboratory frame. Heuristically, absolute instability requires that the growth rate of the instability be faster than the advection rate, and consequently we expect a transition with increasing driving from convective to absolute instability. In particular, near onset, instabilities are convective. The transition to absolute instability is associated with the appearance of an unstable global mode; such modes are believed to be responsible, for example, for the vortex pairing instability of a von Karm4n vortex street. The distinction between convective and absolute instabilities is also important for instabilities in bounded contain- ers, although the interpretation of the two types of instability is somewhat different. Indeed, any time a continuous * Corresponding author. Address: JILA, University of Colorado, Boulder, CO 80309, USA. 0167-2789/98/$19.00 Copyright © 1998 Published by Elsevier Science B.V. All rights reserved PH S01 67-2789(97)00141-3
Transcript of N PHYSICA - University of California,...
-
N ELSEVIER Physica D 113 (1998) 43-72
PHYSICA
Convective and absolute instabilities of fluid flows in finite geometry
S.M. Tobias a,b,,, M.R.E. Proctor a, E. Knobloch b a Department of Applied Mathematics and Theoretical Physics, University of Cambridge, Cambridge CB3 9EW, UK
b JILA, University of Colorado, Boulder, CO 80309, USA
Received 13 January 1997; received in revised form 18 May 1997; accepted 29 May 1997 Communicated by J.D. Meiss
Abstract
Dynamics of linear and nonlinear waves in driven dissipative systems in finite domains are considered. In many cases (for example, due to rotation) the waves travel preferentially in one direction. Such waves cannot be reflected from boundaries. As a consequence in the convectively unstable regime the waves ultimately decay; only when the threshold for absolute instability is exceeded can the waves be maintained against dissipation at the boundary. Secondary absolute instabilities are associated with the break-up of a wave train into adjacent wave trains with different frequencies, wave numbers and amplitudes, separated by a front. The process of frequency selection is discussed in detail, and the selected frequency is shown to determine the wave number and amplitude of the wave trains. The results are described using the complex Ginzburg-Landau equation and illustrated using a mean-field dynamo model of magnetic field generation in the Sun.
PACS: 05.45; 47.20.K; 47.32; 47.54; 95.30.Q Keywords: Hydrodynamic instabilities; Complex Ginzburg-Landau equation; Front formation
1. Introduct ion
The distinction between convective and absolute instabilities is of vital importance in studies of open flows [17].
Briefly, an instability is called convective if it is advected downstream so that at any fixed location in the laboratory
frame a perturbation decays asymptotically to zero. In contrast when the instability is absolute it grows at every
point in the laboratory frame. Heuristically, absolute instability requires that the growth rate of the instability be
faster than the advection rate, and consequently we expect a transition with increasing driving from convective to
absolute instability. In particular, near onset, instabilities are convective. The transition to absolute instability is
associated with the appearance of an unstable global mode; such modes are believed to be responsible, for example,
for the vortex pairing instability of a von Karm4n vortex street.
The distinction between convective and absolute instabilities is also important for instabilities in bounded contain-
ers, although the interpretation of the two types of instability is somewhat different. Indeed, any time a continuous
* Corresponding author. Address: JILA, University of Colorado, Boulder, CO 80309, USA.
0167-2789/98/$19.00 Copyright © 1998 Published by Elsevier Science B.V. All rights reserved PH S01 67-2789(97)00141-3
-
44 S.M. Tobias et al./Physica D 113 (1998) 43-72
system undergoes an instability leading to a propagating or travelling wave the concept of convective and absolute
instability becomes relevant. Perhaps the simplest example is provided by the complex Ginzburg-Landau (CGL)
equation on a finite domain (cf. [12]):
OA OA 02A = Cg~x + ~ A + a[AI2A + ) ~ x 2 , 0 < x < L. (1)
This equation describes the envelope of a travelling wave propagating at the group velocity cg towards negative
x, i.e., in one direction only. The wave is driven by the parameter /z and saturates at finite amplitude if ar < 0;
it is assumed that )~r > 0. The imaginary parts of a and )~ (i.e., ai, )~i) describe nonlinear frequency detuning and
linear dispersion, respectively. Formulations such as these are suitable for describing weakly nonlinear waves not
only in open flows but also their properties in finite containers. In the former case Deissler [12] uses the boundary
conditions A ( L ) = O, Axx (0) = 0 to mimic an open flow through x = 0. In the present paper we are not interested
so much in open flows as in flows in bounded domains. As a consequence we employ the boundary conditions
A = O a t x = 0, L (2)
so that x = 0 acts as an absorbing boundary. The results described below remain qualitatively unchanged if the
boundary condition at x = 0 is replaced by A + gOA/Ox = 0 with g real and negative so that no energy enters the
system at x = 0.
In the following we use the CGL model to illustrate the variety of novel behaviour that occurs when unidirectional
waves interact with boundaries. Although such situations do not arise in the simplest types of convectively unstable
flows, such as channel flow, they arise naturally in many problems of geophysical and astrophysical interest. We
describe here one such system, the mean-field solar dynamo, that exhibits many of the phenomena found in the
system (1) and (2). Related phenomena arise in problems involving pattern advection by through-flow [5,19].
a m p l i t u d e lO 0 . . . . . . . . . i . . . . . . . . . J . . . . . . . . . i . . . . . . . . .
1 0 - 2
10 - 4
1 0 - 6
1 0 - 8 1
0 1 O0 200 500 400 t ime
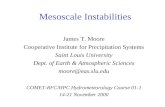
Fig. 1. Transient amplification and ultimate decay of the amplitude rAI in the CGL equation (1) and (2) with L = 60, Cg = 1.0, A. = 1.0 + 0.45i, a = -1.0 ÷ 2.0i and # = 0.15.
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 45
To indicate what might be expected suppose that /z > 0. Evidently the resulting unstable state must develop
spatial non-uniformities in order to satisfy the boundary conditions, and these will be advected towards x = 0. Thus
for/z > 0 a convectively unstable state develops. However, because of the absorption at x = 0 this state cannot be
sustained by a uniform forcing/z > 0 over the finite interval 0 < x < L, and hence the convecfively unstable state
ultimately decays. This is illustrated in Fig. 1. Only once/x exceeds a higher threshold/zf (>0) can the forcing of
the system overcome the dissipation at x = 0, and a globally unstable mode appears. Thus instability first sets in
at/~ = /~f instead of the value/z = 0 expected of an unbounded system. Moreover, the spatial structure of this
marginally stable mode is entirely different; as shown in Fig. 2 the marginally stable mode at/z = / z f has the form
of a wall mode. It should be emphasized that/zf is typically of order 1 so that the threshold shift due to the presence
(a)
10 20
0.045
0.04
0.035
0.03
_~ 0.025
0.02
0.015
0.01
0.005
0 0
0.05
I
4'o 50 so
(D rc
0.045
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
I
(b)
10 20 30 40 50 50 X
Fig. 2. The marginally stable wall mode for L = 60, Cg = 1.0, L = 1.0 + 0.45i, a = --1.0 + 2.0i and/zf = 0.2106. (a) The amplitude IA[ and (b) the instantaneous waveform Re(A).
-
46 S.M. Tobias et aL / Physica D 113 (1998) 43-72
0.5
0.4
0.3
0.2
0.1
0 0
(a)
lo 2'0 3'0 40 x
(b)
l
50 60
0.5
,< "~" o r r
-0.5 0
I t I 1 I
10 20 30 40 50 60 x
Fig. 3. (a) The stationary amplitude [A[ and (b) the instantaneous waveform Re(A) obtained by integrating Eqs. (1) and (2) with L = 60, Cg = 1.0, )~ = 1.0 + 0.45i, a = - 1 . 0 + 2.0i and/z = 0.3.
of boundaries is finite, and remains so even in the formal limit L -+ oo. This is because in the finite container the instability threshold/zf is associated with the onset of absolute instability (/zf = /z a --]- O ( t -2) if L is large, where/Za is the absolute instability threshold in the absence of boundaries) and not with the onset of convective instability. In Figs. 3 and 4 we show the results of integrating equations (1) and (2) for/z = 0.3 and/z = 1.0 using a finite-difference Adams-Bashforth time-stepping code. Both values of /z are supercritical (/z > / z f ) , but/z = 0.3 only marginally so. Observe that the solution now takes the form of a stationary front separating exponentially small waves at larger x from a fully developed nonlinear wave train at smaller x (Fig. 3). With increasing/z this wave
train broadens out to larger values of x, until it fills the domain (Fig. 4). For yet larger values o f / z the solution undergoes a secondary instability forming a secondary front which divides the domain into two wave trains with different frequencies, wave numbers and amplitudes, separated by the front. In Fig. 5 we show this behaviour in a
colour-coded space-time plot, with the interval (0, L) along the horizontal axis and time increasing upward. For /z = 0.3 (Fig. 5(a)) the waves initially travel towards x = 0, but as they grow in amplitude they reverse their direction of propagation, implying repeated phase slips at the front. B y / z = 1.5 (Fig. 5(b)) the secondary front is not only fully formed but signals a transition from a highly ordered state to spatio-temporal chaos at small x. This behaviour is quite different from that occurring in systems with reflection symmetry, such as binary fluid convection, in which the convectively unstable regime is associated with localized states and the onset of absolute instability with the so-called "filling" transition (cf. [6,7]). In that system, however, the waves can be reflected from the boundaries, and it is this reflection that is responsible for the difference between the two types of systems. When the symmetry between the left and right propagating waves is weakly broken boundary reflection remains important, but for strong asymmetry the absolute instability criterion again gives the instability boundary [15].
-
S.M. Tobias et al. /Physica D 113 (1998) 43-72 47
(a) i i I i
c,,. 0.8
0.6 I-j
0.4
0.2
0 0
0.5
< "6 0
-0.5
I I l [ I
10 20 30 40 50 x
(b)
60
-1 0 60
i i , l l
I I
l o 20 30 40 so x
Fig. 4. Same as Fig. 3 but for/z = 1.0. The wave now fills essentially the whole domain and the selected wave number is substantially higher.
The CGL equation is a convenient model within which much of the observed behaviour of unidirectional waves
in finite systems can be discussed. It is important, however, to describe a specific system that exhibits the type of
behaviour described above. In addition to illustrating how such a situation comes about, a discussion of a specific
example has one further merit. This is because, in contrast to the CGL equation, the specific example retains the
frequency and wave number of the basic waves instead of focusing only on their envelope. In particular, the process
of frequency and wave number selection can be discussed in detail. The system we consider arises in dynamo theory
[23], the theory of the generation and dynamics of large-scale magnetic fields in stars and planets. Specifically, we
consider here a nonlinear mean-field or-S2 dynamo described by the pair of equations
OA D B 0 2 A OB OA O2B
3 t - - I + B ~ + f f ~ x 2 - A ' Ot - - Ox + ff~x 2 - B (3)
Here D > 0 is the dynamo number, analogous to the parameter /z of the CGL model, and A and B are the poloidal
field potential and the toroidal field itself. Both are real-valued functions. The problem is posed on 0 < x < L, with
x playing the role of the latitude, so that x = 0 is the equator, and x = L the pole. Neither the derivation of these
equations nor the physics behind them will be needed in what follows; for the purposes of this paper it suffices that
the resulting system constitutes a convenient and tractable model of magnetic field generation in rotating stars [24]
and exhibits dynamics related to those described by Eq. (1). The nonlinearity in the first equation models the process
of "o,-quenching" [27] and results in the sa~tration of the instability. The dynamo number is taken to be uniform
on 0 < x __< L; because the "or-effect" measured by D vanishes at the equator, x = 0 forms a natural boundary
with which all incoming dynamo waves must interact. In the absence of boundaries these waves are first excited at
-
48 S.M. Tobias et al./Physica D 113 (1998) 43-72
X
(b)
. J
X
Fig. 5. Colour-coded space-t ime plots obtained for the CGL equation (1) and (2) with L = 60, Cg ---~ 1.0, )~ = 1.0 + 0.45i, a = - 1.0 ÷ 2.0i and (a)/z = 0.3, (b)/z = 1.5. The domain (0, L) lies along the horizontal axis, with time increasing upward. In (a) the waves change their direction of propagation as they pass through the primary front; in (b) a secondary front signals the transition to spatio-temporal chaos.
D ~ Dc = 32/3~,/3 ~ 6.16. Their frequency COc = 4/3 and wave number kc = 1/~¢/3 are obtained by minimizing the critical dynamo number as a function of k.
If Eqs. (3) are integrated with the (dipole) boundary conditions
OA - - B = 0 a t x = 0 , A = B = 0 a t x = L , (4)
Ox
one finds for D marginally greater than De a growing dynamo wave that propagates towards x = 0. Although this wave grows for a long time, O(L) for a large domain, it is in fact a transient and eventually decays to zero [31]. The explanation is identical to that for the CGL model. The dynamo waves only propagate in one direction, towards the equator. Consequently they cannot be reflected at x = 0 and hence the equator behaves like an absorbing boundary. To sustain the waves against the resulting dissipation it is necessary to increase the dynamo number to Df = ~/2Dc + O(L-2) , corresponding to the transition to absolute instability and the appearance of a globally unstable mode. For D > Df the unstable mode is confined to the vicinity of the equator, but with increasing D
-
S.M. Tobias et al./Physica D 113 (1998) 43-72
(a) 49
X
(b)
.+.3
X
Fig. 6. Colour-coded space-time plots obtained for the dynamo equations (3) and (4) with L = 300 and (a) D = 8.75, (b) D = 15.0. The domain (0, L) lies along the horizontal axis, with time increasing upward. In (a) the primary front selects the amplitude and wave number of finite amplitude dynamo waves; in (b) a secondary front signals the transition to temporal chaos.
it expands towards larger and larger latitudes until it interacts with the boundary at x ---- L. This interaction with
the boundary is important, and has several consequences that go beyond the CGL model. Before the interaction
the ampli tude of the solution near x = L is exponentially small, and consequently the waves that originate in
this region have essentially the linear frequency cof(L) ---- q ~ q- O ( L - 2 ) , obtained from the dispersion relation
when D = Dr. These waves grow as they propagate towards x = 0, and in steady state the rate of advecfion (at
the appropriate group velocity Cg) just balances the local growth rate. The wave number of the waves behind the
resulting front is selected by the incoming frequency cof: in this globally unstable regime the wave number selection
mechanism is thus quite different from that operating in the convecfively unstable regime. The selected wave number
is essentially independent of the domain length (if this is sufficiently large), at least until the solution expands all
the way to the boundary at x = L. Thereafter the selected frequency depends both on D and On the nature of
the boundary condit ions at x ---- L. This transition is usually soon followed by the break-up of the wave train into
two separate wave trains of different frequencies, wave numbers and amplitudes, separated by a secondary front
[29]. We illustrate these observations in Fig. 6, again in the form of a space- t ime plot. Fig. 6(a) shows the regime
-
50 S.M. Tobias et a l . /Physica D 113 (1998) 43-72
before the formation of the secondary front. The waves propagate uniformly towards x = 0, with a well-defined
wave number and constant amplitude. In contrast, Fig. 6(b) shows the corresponding situation substantially after the formation of the secondary front. The front oscillates chaotically, and phase is not conserved across the front.
The rest of this paper is devoted to a detailed understanding of the behaviour sketched above, focusing on the frequency and wave number selection process, and the properties of both the primary and secondary instabilities. In particular we find that the secondary instabilities in both systems have ultimately the same character, in that both
are associated with the transition from convective to absolute instability for appropriately defined perturbations. In the following we describe the theory for the CGL equation for which an analytical understanding of the secondary instability is possible. In Section 3 we present a similar discussion for the dynamo waves, and provide numerical
evidence that the secondary instability shown in Fig. 6(b) is also associated with the onset of absolute instability. In Section 4 we relate our results to the dynamics of fronts and the theory of modulational instabilities, and summarize
the role played by finite geometry in problems of this kind.
2. The complex Ginzburg-Landau equation
2.1. Linear theory
We first consider Eq. (1) in the absence of boundaries. The dispersion relation for perturbations of the trivial state A ---- 0 of the form A ( x , t) = IAle int÷ikx is
iX-2 = Ix + ikcg - )~k 2. (5)
Assuming that k is real we have
Ix = ).r k2, ,(2 = kcg - )qk 2. (6)
Evidently Ix is minimized by kc = 0, and thus Ixc = 0 represents the threshold for convective instability. The
corresponding frequency I-2c = 0. The theory describing the appearance of absolute instability [1,3] shows that the onset of the instability is associated with the appearance of a double root of the dispersion relation in the complex
k-plane satisfying a certain "pinching" condition. Eq. (5) has a double root when
2 iCg )~iCg 2 )-rCg ka - - A'2 a -- (7)
Ixa - - 41)q 2, 2)~' 41)q 2
In the following we assume that f2 a > 0 (i.e.,)~i > 0) so that Re ka > 0 and the waves travel leftward; if)~i < 0 we write instead A ( x , t) = e - i x 2 t - i k x and proceed as before.
In the presence of boundaries, A(0) = A ( L ) = 0, and large L we find that a global unstable mode sets in when
Ix ~-" Ixf ~ Ixa -}- C 1 L - 2 q- o ( L - 2 ) , (8)
and has frequency
S-2f = ,Qa "~ C2 L - 2 q- o ( L - 2 ) • (9)
Here C1 = )~r ~ 2 , C2 = --)~iYr 2 are constants. The unstable eigenfunction has the explicit form
A ( x ) = A l f ( x ) , f ( x ) = e -(%/2z)x sin Jr f_x (10) L
The above results were first obtained by Deissler [12]. However, Deissler was primarily interested in the effect of boundaries as a source (nozzle) through which (unstable) disturbances are injected into the flow and then left to
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 51
propagate downstream. As a consequence he failed to notice that when the wave is incident on a boundary it wilt decay unless /z > /xf. Indeed, in the finite container it is intuitively clear that fo r / z < /xf there is no sustained growth s ince/zf is defined to be the smallest ~f for which a globally unstable mode is present. Thus any growth present for /z < / x f has to be transient, cf. [19].
2.2. Weakly nonlinear theory : / z - /d , f = O(L -5)
Eq. (10) shows that the unstable mode falls off exponentially towards larger x, i.e., at onset the instability takes the form of a wall mode (e.g., [ 16] ). As/x is increased above/~f the amplitude A 1 of the mode will grow exponentially in t ime and the mode will saturate at finite amplitude. To examine this process we write
/Z = ]Zf q- ~2/.~ 2 -]- . - - , ~'~ = S2f -}- ~2~'2 2 q- - . . , A = 6 A l f ( x ) e ix?t + 33A3 + • . . , (11)
where f ( x ) is the eigenfunction (10), and ~
-
52 S.M. Tobias et al./Physica D 113 (1998) 43-72
number and amplitude, at least according to our numerical simulations. Both the wave number and amplitude are
selected by the frequency ;2f (assumed positive) of the incoming waves, as well as the value of /z , according to the
equation
iS2f - / z = ikcg - Xk 2 + alA0l 2. (16)
Here k is the real wave number of the waves in x < Xfron t and [A0[ is their amplitude. Specifically,
_1 IA012 [ar)~rC 2 + 2(Xrai -- Xiar)(S2fXr +/xXi)
- - 2()~rai Xiar) 2
q:: XrCg,/c2a 2 + 4 ( X r a i - Xiar)(S-2far + •ai)|, (17) J
and
4- ~/c~a'r z q- 4(Zrai -- Xia r ) (~fa r q-/zai) ~ C g a r k = " ° - (18)
2(Xrai -- Xiar)
These expressions apply as soon a s / z - / z f = O(L -2) when IA01 becomes O(1) in the posffront region. I f L is
large, we may approximate a'2f with a'2a so that a t /z = / z f ~ ]Za
2 2 cg 2)~21a]2 Cga r q- 4(Xrai - Xiar)(S2far q- /zai) -- i;q----5~ + O(L -2) > 0. (19)
Hence a t / z = / z f both [Ao] 2 and k are real. Moreover, at this value of /z , the requirement that IAol 2 > 0 leads to
the predict ion of a unique IAol 2,
2 2 IAol 2 = 1 CgXr 0~rar q- Xiai q- lall ;q), (20)
2 (Xrai - Xiar) 2 [XI 2
together with a unique wave number
k = Cg(I;qar + [alXr) (21) 21)q (3-rai - Xiar) "
Note that the selected wave number may be positive or negative, depending on parameters, and hence that the
selected waves may travel to the left or right under the envelope IA01. Note also that both of the above expressions reduce to the correct limits as ai ~ 0, Xi ~ 0.
F rom expressions (17) and (18) we also see that if a i (Xra i - Xiar) > 0 the selected wave number remains unique
a s / z increases. In contrast when ai (Xrai - Xiar) < 0 there are situations in which the selected wave number (and
IA012) are complex, and the Stokes solution I A01e iseyt+ikx ceases to exist. This interesting regime is not considered
in this paper. It is evident that as soon a s / z - / z f = O(L -2) the formation of the front provides a selection mechanism for a
particular member of the Stokes family of solutions of the CGL equation, and that this mechanism is essentially
the same as in periodical ly forced systems. Indeed, we can think of the exponentially small waves coming in from
large x as a p a c e m a k e r which sets the frequency of the finite amplitude waves in the postfront region. Moreover,
this selection process is effectively independent of the nature of the boundary conditions applied at x = L, provided
only that these are of no-flux type, i.e., provided they exclude incoming waves with frequency near X2f. Fig. 3(b)
shows that when/~ = 0.3 the selected wave number is small and close to that for the linear solution. However, as/x
is increased and the front moves farther to the right (nearly reaching the right-hand wall fo r /z = 1), the resulting
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 53
increase in the frequency of the solution produces an increase in the selected wave number (Fig. 4(b)). Nonetheless, Eq. (16) continues to describe the wave number and amplitude selection process in the postfront region, provided only that the correct frequency £2 is employed, as obtained from the nonlinear eigenvalue problem described below.
Except for the O(L -2) corrections due to boundary conditions the above picture of the front is essentially that
of Dee and Langer [11], see also [30], who argue that a front moving into an unstable domain (here x > Xfront with A = 0) should move with a speed c such that in the frame of the front the system is at the absolute instability
boundary. The resulting "marginal stability" criterion was adapted to the CGL equation on an unbounded domain by Nozaki and Bekki [21], who used it to study wave number selection behind a propagating front. It is not surprising, therefore, that there is a close relation between the results of Nozaki and Bekki, and those obtained above for a
stationary front at/~ ~ / x f . Despite this connection to the front propagation problem there is an important difference between the selection mechanism for the wave number behind the front proposed by Dee and Langer and Eq. (16).
Dee and Langer employ conservation of phase (in the frame of the front) to determine this wave number; as a
result their selection mechanism is purely linear. An identical argument applied in our case shows merely that the frequency is conserved across the front, as supposed in Eq. (16). However, by itself this argument does not lead to a prediction of the wave number behind the front. For this we use the nonlinear dispersion relation (16), and our wave number selection process is nonlinear.
As shown already by Dee [ 10] the approach suggested by Dee and Langer [ 11 ] may fail even for the real Ginzburg- Landau equation because of the detailed behaviour of the phase slips that take place as waves pass through the front.
While similar behaviour may occur in the CGL equation and result in the selection of postfront frequencies that differ from ~2f, the marginal stability criterion works well in the cases considered below (cf. [21]) and this accounts for the success of Eq. (16) in describing the postfront behaviour (cf. [25]).
2.4. Fully nonlinear solutions
When # - / z f = O(1) the front is within O(1) distance of the x = L boundary. As a result the frequency X2 near x = L differs from ff2f by O(1) and has to be determined numerically, even for L >> 1. This leads to a nonlinear eigenvalue problem for £2 whose solution depends both on/z and on the details of the boundary conditions applied at x = L. However, the wave amplitude and wave number continue to be selected by the frequency. In this regime
one typically finds a secondary instability as/x continues to increase, i.e., the basic periodic solution loses stability in a secondary Hopf bifurcation. The instability first occurs near x = 0 and generates an internal front separating two distinct waves (with different amplitudes, wave numbers and frequencies) adjacent to one another. The properties of
the wave at larger x continue to be selected by the boundary at x = L through its effect on the frequency. The wave at small x typically has quite different properties. These properties are not determined by phase conservation across
the front: as shown in Fig. 5 the phase is not conserved. The location of the front may be fixed in space, or the front can oscillate back and forth, typically irregularly. Even when the front appears stationary the complete solution is now typically quasiperiodic since the frequencies in the two constituent waves are expected to be incommensurate. With increasing/~ the internal front moves to higher and higher x, but does not reach x = L.
The dependence of the frequency ~ on/~ for the basic wave train, and the instability of the periodic solution to a secondary front can only be investigated systematically by solving the nonlinear eigenvalue problem. In theory
some information about the frequency could be ascertained from the time-stepping code but investigation of the secondary instability is difficult in the initial value problem, as the solutions are extremely sensitive to any numerical noise in the system (as noted by Deissler and discussed at greater length below). In the eigenvalue problem solutions of Eq. (1) of the form
A = eiS2t(Ao(x) -1- e A l ( x ) e i°)t+st q- eA~(x)e-i~°t+st), ~:
-
54
0.8
S.M. Tobias et al./Physica D 113 (1998) 43-72
mu=1.0 i i i i i i
0.78
_ 0.76 _
-
1.2
1
0.8
0.6
0.4 0.2
1.5
S.M. Tobias et al./Physica D 113 (1998) 43,72
L=60
J J
I I I I I I I I
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 I T lU
I I I i I I I I
55
1
E 0
0.5
J J
J
0 F I I I [ t I [
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 mu
Fig. 8. (a) The selected amplitude and b) the corresponding frequency I2 as a function of/z for L = 60, Cg = 1.0 and )~ -- 1.0 + 0.45i, a = -1.0 -t- 2.0i as obtained from the solution of the nonlinear eigenvalue problem.
for Cg ----- 1, 7. = 1.0 + 0.45i, a = - 1 . 0 + 2.0i and various values o f / z and L, although other parameter values
are also surveyed. For this case right-travelling waves are selected behind the front, and the corresponding Stokes
solution is Benjamin-Fe i r stable with respect to long wavelength perturbations when boundaries are ignored: recall
that when ~-rar %- )~iai < 0 there is a band of Benjamin-Fe i r unstable wave numbers, but sufficiently small wave
numbers are stable. In contrast if ~-rar %- ~iai > 0 no stable wave numbers are present, despite the fact that Eq. (16)
may predict real values for k and [A0[.
2.4.1. Properties o f the basic wave train
In order to compare these numerical results with the theory valid in the l imit of L --+ ~ it is important to check
that the length L is sufficiently long so that the results are only very weakly dependent on L. For the parameters used
in Fig. 4 the results of this test are shown in Fig. 7. Both the amplitude [A01 of the periodic state and its frequency
$2 become essentially independent of L as L is increased. The calculation shows that it suffices to fix the length at
L = 60 and still be well inside the asymptotic regime.
In the following we therefore fix L = 60, Cg = 1.0, and investigate the dependence of the frequency $2 on
the coefficients ai, 7.i and on the control parameter /z . Fig. 8 shows the dependence of both [A0] and S-2 o n / z for
a ---- - 1.0 + 2.0i, )~ = 1.0 + 0.45i. Evidently, the amplitude is a monotonical ly increasing function of the driving (as
expected), while the frequency also increases with/z; in particular the frequency departs from the linear value given
by Eq. (9). In this example I2 > 0 for al l /~. This is not always the case, however. For example, as ai is changed
(at a fixed value of /z and )~i) the frequency S2 becomes negative if ai is sufficiently small as shown in Fig. 9. This
-
56 S:M. Tobias et al./Physica D 113 (1998) 43-72
0.2
0.1
0 E 0 -0.1
-0.2
- 0 . 3
! ! ! ! ! ! !
i i -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
a_i
0.4
0.2
0
-0.2
-0.4 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
a_i
Fig. 9. (a) The frequency S2 and (b) the wave number k as a function of a i for fixed # = 1.0 and L = 60, Cg = 1.0, ,k = 1.0 + 0.45i, ar = -1.0. Notice that the phase speed of the waves X2/k is negative except in a small regime near a i = 0.
change of sign may or may not indicate a reversal in the direction of propagation of the basic wave, which depends
on the associated wave number. It is noteworthy that the wave number k (computed as part of the eigenfunction
A0) also changes sign as ai varies. Since the change in sign of k occurs near the value of ai at which X2 changes
sign, the phase velocity X2/k remains negative everywhere except in a very small region of parameter space. These
properties of the eigensolution correspond very accurately to the results of our finite-difference simulations.
It must be stressed that Fig. 8 alone gives no indication of the stability of the basic state to periodic perturbations;
we have already seen that for some of the values shown the periodic solution is unstable to the formation of a
secondary front (see Fig. 10). This instability occurs when the growth rate s of the linear perturbations A1 and A2
becomes positive. For a = - 1 . 0 + 2.0i, )~ = 1.0 ÷ 0.45i this occurs when # = 1.49222; the frequency of the
periodic solution is then ~2 = 0.711511. Fig. 10 shows the periodic solution A0 for this value of the parameters
together with one of the eigenfunctions (A2) of the linear problem. It is clear from this figure that A2 has the form of
a wall mode pressed against the left boundary, with a clearly defined wave number (different from the wave number
of A0).
2.4.2. Secondary instability o f the basic wave train
The appearance of the secondary front is of particular interest and appears to be associated with an absolute
instability of the original wave train. As noted already by Deissler [ 12,13] (see also [20]) unstable perturbations of
an already developed wave train can either propagate downstream (convective instability) or grow in place (absolute
instability). The argument given for the primary instability can thus be carried over to the secondary instability, and
formulated (at least for uniform wave trains) in terms of the properties of the Floquet multipliers of the wave train
-
- 1 ' 0
I
10
1 . 2 ]
S.M. Tobias et al./Physica D 113 (1998) 43-72
(a) 1
0.5
O I
0 re I
(b)
l I
20 30 X
I
50 60
-0.5
I
40
57
1L. 0.8
9 0.6
0.4
0.2
O0 10
-40 110
2'o ' ' 30 40 5 60 X
(c) I I
, , , ]
0 30 40 510 60
Fig. 10. Secondary instability: Solutions to Eqs. (23)-(25) for L = 60, Cg = 1.0, )~ = 1.0 + 0.45i, a = - 1.0 + 2.0i and/z = 1.449222 for which a secondary instability is present. (a) Graph of Re(A0) versus x, (b) graph of IA01 versus x. The basic periodic solution takes the form of a uniform wave except at the boundaries where an adjustment is made to satisfy the boundary conditions. (c) Graph of Re(A2) versus x. The linear perturbation takes the form of a wall mode pressed up against the left boundary.
[2]. The a r g u m e n t p red ic t s tha t w i th the g iven b o u n d a r y cond i t i ons the t h r e sho ld for s econda ry ins tab i l i ty wil l b e
sh i f t ed to the t h r e s h o l d for the onse t o f absolute seconda ry instabi l i ty , and wil l g ive r ise to a s econda ry front , w i th
the wave t ra in b e h i n d the f ron t d e t e r m i n e d by the f r e q u e n c y o f the pe r tu rba t i ons o f the bas ic wave t ra in p r o p a g a t i n g
in to the f ron t f r o m la rger x. Th i s f r e q u e n c y is d e t e r m i n e d b y the d i spe r s ion re l a t ion for the pe r tu rba t i ons o f the
bas i c wave train.
-
58 S.M. Tobias et al./Physica D 113 (1998) 43-72
For the CGL model this conclusion can be made explicit. We approximate the original wave train by Ao =
IAo [e is2t+ikx , where k is real, and look for a perturbation solution of the form
A = Ao[1 -t- al eic°t+qx + a~e-k°t+q*x], (27)
with co real but q complex. Substituting into the CGL equation and linearizing in a l , a2 yields a second order system
of the form
i c o ( a l ) = M ( a2 ' (28)
where the 2 x 2 matrix M depends on I n o l , k and q (once I2 is eliminated using Eq. (16)). This equation yields a
quartic dispersion relation of the form
F(co, q; rAol, k) -= q4 + rn3q3 + m 2 q 2 + m l q + t o o = 0, (29)
2CgZr
iXl 2 ,
(aX[Aol 2 + ~)~IAol 2 + c 2 - 4 c g k Z i - 2icoZr + 4k21ZI 2)
m 2 = i)~12
( - -2 ik lAol2(aZ -- K)~) -- 2icgco + 2CgarlAol 2 + 4icokZi) ml = IZI2
co(co q- 2iarlA0l 2) m0 = - IZI2
where
m3 - -
(30)
As before we look for a double root of the dispersion relation in the complex q-plane. In Appendix A we explain
why the location of the double root of the dispersion relation is a non-trivial numerical exercise.
The double root of the dispersion relation yields predictions for properties of the solution at the secondary Hopf
bifurcation that may be checked against those calculated from solving the nonlinear eigenvalue problem. These
predictions are summarized in Table 1 with the properties of the solution to the nonlinear eigenvalue problem
labelled with the subscript 1 whilst those calculated from the double root of the dispersion relation are labelled with
the subscript 2. The table demonstrates that the double root criterion gives an accurate prediction to the true value
Table 1 Comparison of the properties of the secondary instability obtained from the nonlinear eigenvalue problem (labelled by subscript 1) with those predicted using the secondary absolute instability criterion (labelled by subscript 2). Thus/z 1 denotes the threshold for the instability obtained from the eigenvalue problem; the parameters ki and a i vary for fixed Zr = 1, ar = - 1, Cg = 1.0 and L = 60
Zi ai `01 ~1 ]A0[1 o91 .02 ks IA012 o92
1 2 0.28837 0 . 8 6 7 2 0 3 0 .753416 1 .92408 0 . 3 2 2 7 --0.5393 0.7592 1 1.525 0 .6322098 1 .999482 1 .171324 3 . 2 7 6 5 2 0 . 6 6 9 3 --0.7928 1.1709 0.45 2 0.711511 1.49222 0 . 9 3 9 7 1 2 2 . 4 9 5 8 8 0 . 7 2 8 8 --0.7769 0.9427 0.45 3 0.255593 0 . 6 4 3 5 3 3 0 .567724 1 . 5 7 6 1 6 0 . 2 7 7 4 --0.5623 0.5721 0.45 4 0.160571 0 . 4 4 3 4 9 7 0 .439686 1 .33188 0 . 1 9 7 7 --0.4933 0.4474 0.7 2 0.452394 1 . 1 6 0 3 0 0 . 8 4 5 8 0 9 2 . 2 4 3 2 5 0 . 4 7 4 3 --0.6623 0.8496 0.9 2 0.3318650 0 .954848 0.782638 2 . 0 3 0 9 7 0 . 3 6 0 9 --0.5785 0.7876 0 2 3.11015 3.50669 1 . 4 6 2 4 0 3 . 8 8 3 6 7 3 . 1 4 2 5 --1.1635 1.4673
--0.0395 2 4.27104 4.40799 1.65794 4 . 5 8 4 9 9 4 . 5 6 5 3 --1.2832 1.6117
1.9161 3.2915 2.4960 1.5773 1.3384 2.2412 2.0235 3.8807 4.5653
-
S.M. Tobias et aI./Physica D 113 (1998) 43-72 59
0.8
(a)
o.7
0.6
0.5
O.4
0.3
0.2
0.1 2
a~
(b)
3 ......
1.
1.4
t I I
Fig. 11. Comparison of (a) the wave train frequency Y2 and (b) the frequency o9 of the secondary instability as functions of ai obtained from the nonlinear eigenvalue problem (solid line) and the double root criterion (asterisks) for i i = 0.45. The remaining parameters are as in Fig. 10.
for most of the parameter values chosen. These parameter values include regimes of both Benjamin-Fe i r stable
()~rar q- l i a i < 0) and Ben jamin-Fe i r unstable ()~rar q- i i a i > 0) solutions on unbounded domains, but in all cases
the waves in the basic wave train travel to the right when the secondary instability sets in.
The accuracy of the predictions is made clearer in Figs. 11 and 12 which show the primary and secondary
frequencies obtained both from the double root criterion and from the nonlinear eigenvalue problem.
2.4.3. Disappearance o f the secondary instability
In Section 2.4.2 we have demonstrated that the value of/~ at which the secondary instability first appears can be
successfully predicted, for a large range of parameters, from the transition to absolute instability of a periodic wave
train, provided only that the frequency of the wave train, ~2 (/z), is a known function of /z .
-
60
4.5
4
3.5
3
£.5
£
1
0.5
0 -0.';'
4.5
4
3.5
3
';'.5
1.5 -g,2
S.M. Tobias et al./Physica D !13 (1998) 43-72
(a)
i i
(b)
01. 01t 018
Fig. 12. Comparison of (a) the wave train frequency/2 and (b) the frequency ~o of the secondary instability as functions of ,k i obtained from the nonlinear eigenvalue problem (solid line) and the double root criterion (asterisks) for a i = 2.0. The remaining parameters are as in Fig. 10.
Fig. 13 shows, however, that as a i decreases for ~-i --~ 1.0, the critical value o f /x for the secondary instability
increases significantly. Indeed it appears as though there is a minimum value of ai (a~ nin) below which no secondary
instability occurs, at any #. This suggestion is consistent with the results of numerical t ime-stepping of the CGL
equation; these show that the primary wave train remains stable i f ai is sufficiently small even for exceptionally
large values of /x. Figs. 13(b) and (c) show that as ai approaches a rain from above both the primary f requency /2
and the secondary frequency co also increase.
The disappearance of the secondary instability can be understood using the absolute instability criterion discussed
in Section 2.5. The instability disappears when the condition for a double root of the dispersion relation (29), given
by expressions (A.5) and (A.6) of Appendix A, ceases to correspond to a real co and a real k. In practice we use the
f requency/2 as our parameter and use the solution k to calculate the corresponding/~ and I A01 using Eq. (16) even
though there is no guarantee that a physical ly realizable solution to the double root criterion exists for an arbitrary
-
£z
0 1.1
8
8
4
2
0 1.1
2.5
S.M. Tobias et al./Physica D 113 (1998) 43-72
1 i i i i
1.15 1 2 ' '. ' ~. ,
1..~5 1 3 1.35 1 4 1.45 a i
tb)
I I
1 . 1 5 1 . 2
i 13 i i i 1.2,5 1. 1.3.5 1.4 1.45
a i
1.5
1.5
61
9
1.,.5
1
0.5
I
.1 1.15 1..9,5 1 3 1.35 1 4 1.45 1.5
a i
Fig. 13. Threshold for secondary instability as a function ofai for L = 60, Cg = 1.0 and )~r = - a r = )~i = 1.0. The critical values of (a) /z, (b) the primary frequency S2 and (c) the secondary frequency co. All three quantifies start to increase rapidly as ai decreases.
value of £2. However, by varying S2, we can find the locus of double roots to the dispersion relation in the ( /2 , /x)
plane. The secondary instability of the wave train can then be predicted by comput ing /2 as a function of /z for the
primary solution (as discussed earlier in Section 2.4). I f the wave train is susceptible to secondary instability, these
two curves will cross, as shown schematically in Fig. 14(a). In the examples discussed in Section 2.4.2 the primary
solutions always lost stability and did so at a f r equency /2 known from the solution of the nonlinear eigenvalue
problem. Hence only a small range of values of S2 needed to be checked in order to find the crossing point of the two curves.
There is, however, no a priori reason why these curves must cross, and Fig. 14(b) shows a schematic of a scenario
where no secondary instability occurs. The key factor is the dependence of the frequency /2 on /z. I f / 2 is a
monotonical ly increasing function of /z (as in Fig. 14(a)) it is l ikely (although not certain) that the curves will cross
and the condition for absolute instability will be met. I f / 2 reaches a maximum (as in Fig. 14(b)) it is possible that
-
62 S.M. Tobias et al./Physica D 113 (1998) 43-72
(al
p.
f~ (bl
i
S
g
loc~s of dc~ble-root sol~tlc~s
freql~e~ilcy of primary wave-tra~
Fig. 14. Schematic showing disappearance of secondary instability: (a) The dependence of ~ on/~ for the primary wave train (solid line) is such that the curve crosses the locus of double root solutions (broken line). (b) The frequency £2 is not a monotonic function of # and the required frequency for secondary instability is not reached.
the primary wave train will never reach a frequency that triggers the secondary (absolute) instability and hence will remain stable for all values of/x. It is simple to calculate the dependence of ~ on/x for the primary wave train in
the two cases, ai large (secondary instability sets in) and ai small (no secondary instability) and these are shown in Fig. 15. As postulated, the frequency £2 for the case where the primary solution remains stable (Fig. 15(b)) has a turning point, and the secondary instability criterion is never met. This discussion demonstrates the importance of the primary frequency (controlled by both the boundaries and the nonlinear coefficients) in determining the nature
of the solutions.
2.5. CGL fronts and nonlinear absolute instability
Observe that the calculation leading to the dispersion relation (29) is nothing but the usual calculation to identify
the presence of sideband instabilities of Eckhaus-Benjamin-Feir type (e.g., [28]). The difference here is that instead of taking q to be real and looking for solutions with Im co < 0, we take co to be real and allow q to be complex. The
consequence of the absolute instability identified above, viz. the formation of the second front, was seen by Nozaki and Beldd [21] in their numerical study of the CGL equation on an unbounded domain. Nozaki and Bekki observe that the wave number selected by the marginal stability criterion of Dee and Langer may lie in the Benjamin-Feir unstable regime, and show that in this case as the pattern propagates an additional front will form, with the wave number of the pattern behind the new front selected by the same marginal stability mechanism, except in the very highly Benjamin-Feir unstable regime. As discussed above we find similar behaviour when boundaries are present. However, in contrast to the situation described by Nozaki and Bekki, in our case both fronts are essentially stationary in space (except for residual time-dependence due to repeated phase slips as the first wave is turned into the second),
and hence no relative motion between the fronts is present.
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 63
90
(a)
f /
~0
70
80
50
40
80
~0
10
0 0 50 100 150 ~00 250 300
0
2;:,
.-4
-6
-,8
- 1 0
-1 ")
-14
I I I I I I I
-180 50 100 1.50 200 @_50 {t00 &50
(b)
l i i t [
I l
400 45O 500
Fig. 15. Computed primary frequency I2(/z) for (a) a i = 1.5 and (b) ai = 0.4. The remaining parameters are as in Fig. 10.
On an unbounded domain one can show, fo l lowing Nozak i and Bekki [21], that Eq. (1) has a stationary front
solut ion o f the fo rm
A = A0[1 + eZX] - ( l+ ia ) e x p i ( K x + S2t)
when
2 Cg~.r (R) 2 _~_ 9,k2).
/Z ~--~ /£stationary ~ 3~T'7, , 4 ~ , - " r
(31)
(32)
-
64
Here
A 2 = - ( IZ -- XrK2) /ar ,
ee = --fi 4- ~ f i 2 + 2,
52 __ 4/ZZr 8~.r 2 + 9)~. 2 '
1
S.M. Tobias et al./Physica D 113 (1998) 43-72
( K = o r+ 2Zr// ' 3 ( k r a r + k i a i )
( ) q 12oel;q 2 S 7 2 = K c g - ~rr + 8 ~ r 2 ~ 2 / / z .
(33)
Note that only one choice of sign in the expression for ot yields a positive A2; hence only one front solution exists
for a given set of parameters. Note also that/Zstationary < ]~f while S'2stationary > S2f. Thus the role of the boundary conditions is to generate stationary fronts in the regime/z > /zf where in the absence of boundaries the front would
travel to the right, annihilating the unstable state A = 0. The wave number before the front (x >> Xfront ~ 0) is given by
k = K - tc~ = Re ka. (34)
Thus at /z = /Zstationary the prefront wave number is the same as that associated with absolute instability (at //, = ~a > //,stationary)- Similarly, the postfront (x Xfront is given by
c o = 12 - K~Va,
while for x 0.
The wave number in x >> Xffont is
32q k = K - Kot = - - t o .
2)~r
(37)
(38)
(39)
(40)
-
S.M. Tobias et al. IPhysica D 113 (1998) 43-72 65
Thus at # = /Za we have
1)~iCgl)~l ~ [ [ x 2++X 29X 2 .) k - R e k a - - 2 ~3~8~-r2 1 > 0. (41) Thus both the frequency and wave number in the prefront region are larger than those predicted by the marginal
stability criterion whenever )~r)~i ~ 0. Finally, the wave number in x >> Xfront is simply K, and when # =/Xa this is
rcg ( K = iXlv/8X2 + 9)~ 2 ot + 2)~rJ " (42)
It is important to understand the reason why both the frequency and wave number in the prefront region exceed the
linear stability results (7), even though when x >> Xfront the exact solution is exponentially small. It is tempting to suppose that in this regime the solution should approach the linear theory results. This belief is misplaced, however.
The solution (31) is fully nonlinear for all/~ > 0, even when x >> Xfront. Since for /z < //,stationary the front moves leftward, at every fixed x a finite amplitude disturbance ultimately decays to zero; similarly, for # > /Zstationary, the front propagates rightward, and at any fixed x the trivial state is ultimately replaced by the finite amplitude wave.
Thus/x = /~stationary plays the same role in the nonlinear problem as the transition from convective to absolute instability in the linear problem. Consequently we identify/x = /Zstationary as the transition to nonlinear absolute instability, and attribute the differences in the prefront values of the frequency and wave number from their linear values to the effects of nonlinearity. These effects are finite even though the finite amplitude solution is exponentially small in the prefront region. However, because of the smallness of the solution in this region/~stationary is independent of at, ai. Ultimately this remarkable fact is related to the fact that the front speed is selected by linear processes
alone, as described by the marginal stability hypothesis of Dee and Langer. Following Nozaki and Bekki [21,22], Landman [ 18] has found both analytical and numerical solutions of the CGL
equation on an unbounded domain in the form of primary and secondary fronts, and these results can be employed
in a similar fashion to those obtained above. In fact, for the real Ginzburg-Landau equation with a < 0, X > 0 the existence of front solutions connecting two different wave numbers has been established rigorously [14], for appropriate ranges of wave numbers. However, since in the presence of boundaries we do not expect the analytical
expressions for such secondary fronts to correspond as well to the numerical results as for the primary fronts we do
not pursue this avenue further.
3. Nonlinear dynamo waves
In the absence of boundaries the onset of dynamo waves can be determined from the dispersion relation for infinitesimal waves of the form e i~t+ikx obtained by linearizing Eqs. (3)
(iS2 + 1 + k2) 2 = ikD, (43)
or, equivalently,
D = 2(1 q- k2)2 /k , £2 = 1 + k 2. (44)
Minimizing Dc with respect to k yields
Dc = 32/3~/3, X2c = 4/3, kc = 1/ , /3 . (45)
-
66
1 . 5
I I
0.5 I I
I
0
-0.5
I
F
'1 |
t
S.M. Tobias et al./Physica D 113 (1998) 43-72
i i t i ~ i
i T f ~ i i i T r -10 0.1 0.2 0.3 0.4 0 5 0 6 0 7 0.8 0.9
x/L
Fig. 16. The marginally stable eigenfunction for the dynamo equations (3) with D = 9.02 and the boundary conditions Ax (0) = B(O) = 0 and A(L) = B(L) = 0 where L = 100 at a particular instant in time. The different lines indicate the real and imaginary parts of A(x , t) (solid, dashed) and B(x, t) (dot-dashed, dotted), respectively.
Thus Dc represents the threshold for convective instability. As in the CGL example, when boundaries are present
at x = 0, L (cf. (4)) the convective instability will result in a growing albeit transient solution. The dissipation at
the equator (x = 0) is only overcome with the appearance of a globally unstable mode which is associated with the
transition to absolute instability. In the absence of boundaries this transition is given by the solution of Eq. (43) in
conjunction with the equation
i.e.,
4k(iS2 + 1 + k 2) = iD, (46)
Da = 32~r2/3~/-3, S2a = ~/-3, /Ca = (~/3 -I- i ) /~/6 . (47)
Note that Da = ~/2Dc. With the boundary conditions (4) the transition to the globally unstable mode is given by
D f = Da -t- C t L - 2 q- O ( L - 2 ) , ~ ' 2 f = i f 2 a -~- C 2 L - 2 -I- O ( L - 2 ) , ( 4 8 )
where C1 = 97r2/8, C2 = 3~/37r2/4 [31]. In Fig. 16 we show the resulting eigenfunction computed for L = 100
(Df = 9.02). The eigenfunction takes the form of a wall mode attached to the equator at x = 0.
When D is increased beyond Dr, we find, as in the CGL case, that the equilibrated solution resembles this
eigenfunction only for D - Df =- O(L-5 ) . Once D -- Df = O(L -2) the equilibrated solution extends to
larger latitudes and is bounded by a front separating the waves behind the front (0 < x < Xfront) from the ex-
ponential ly small solution at larger latitudes. The frequency of the waves remains essentially at S'2f (to within O ( L - 2 ) ) , and as before it is this frequency that selects the wave number and amplitude behind the front. Extensive
-
S.M. Tobias et a l . / P h y s i c a D 113 (1998) 4 3 - 7 2 67
numerical simulations indicate that the selection is again unique. The location of the front continues to obey
relation (15). As D increases the front comes to within O(1) of x = L, and the frequency ~2 that is selected by the nonlinear
eigenvalue problem begins to depend strongly on D (and the nature of the applied boundary conditions). Thus the selected wave number and amplitude begin to change as well. For yet larger D we find, again as in the CGL case, a secondary instability that leads to a splitting of the wave train into two adjacent wave trains of different properties separated by an internal front (Fig. 6(b)).
The mechanism for the generation of this internal front appears to be identical to that described for the CGL model. Although we are unable to analyse this secondary instability in the same way as for the CGL model numerical
evidence suggests that the front formation is again the consequence of an absolute instability of the basic wave train.
Specifically, we can track perturbations of the wave train, and find that below the threshold for this instability all
perturbations are advected downstream. For reasons already explained such perturbations, even if they grow as they travel towards the equator, lead to at most transient amplification; in this case the basic state is stable.
The reason one cannot easily obtain a dispersion relation for the perturbations of a train of dynamo waves within
Eq. (3) is that these equations lack a Stokes-like solution. If we modify Eq. (3),
OA D B O2A 3B 3A 32B
Ot -- 1 q-IBI 2 q- ~ - A , 3t -- 3x + ~ - B, (49)
so that both A and B are now complex, a Stokes' solution of the form
A = Aoe is2t+ikx, B = Boe is2t+ikx (50)
is present:
( i~ -}- 1 + k2) 2 -- i k D 1 + IBol 2" (51)
Here S-2 and k are both real; given S2 and D this equation determines the amplitude I Bo[ and the wave number k of the waves. We let
A = Aoei~et+ikx(1 q- a), B -= BoeiSat+ikx(1 + b), (52)
and linearize in a, b. To look for modulational instability we write
• *,~--Rotq-q*x " 1.*,~--kot+q*x a = a l e lc° t+qx q- a2 , . , b = b l e~C°t+qx q- . ,2, . . (53)
The resulting equations reduce to a 4 x 4 linear matrix problem; the condition for a non-trivial solution yields the required dispersion relation:
4S2 5 ( ~ - - - ) q8 _ 4q6(ice + £2 - 2k 2) ~ - q 2k 2 + + 2q4(-3ce 2 + 6iceX2 + 4£22 + 8k 4 - 8icek 2 - 8k2S-2)
8 3( + ~ - - q 2k2ice + 2k212 - 4k 4 + - - + O~
- -4q 2 -4S22k 2 + (ice + ~ - 2k2)(2S22 - 2iS2ce - o) 2) + - - q- (o~ - 2)
4S-2 [S2ce 4 ~ k 2 ] k q ---~-- (--ce + 2i;2) -- (ice + S-2) + 2k2(2S-22 + 2i;2ce - o92)
0L
q- o) 4 -- 8S-22ce 2 + 8iS23ce -- 4ia"2ce 3 8iS23ce -- 0. (54) IX
-
68 S.M. Tobias et al./Physica D 113 (1998) 43-72
Here S-2 = 1 + k 2, a --: 1 + [B012 : kD/2 (1 + k2) 2. This dispersion relation is of degree 8 in q, and can be solved
for a double root in the complex q-plane as described in Appendix A. This calculation yields a critical value of D for the secondary instability which depends on ;2. Recall that this ;2 is in turn a solution of a nonlinear eigenvalue problem and hence is known as a function of D.
We have found when comparing this prediction with numerical simulation of the modified problem (49) with the boundary conditions (4) that the agreement is not as good as for the CGL equation. This appears to be due
to the rather sensitive dependence of the critical value of D on the frequency ;2. Nonetheless, the above mo-
dification of the problem lends support to our interpretation of the secondary instability as a secondary absolute instability.
It remains to observe that in a finite geometry the reduction of the dynamo equations to an amplitude equation of
CGL type is not a simple matter. Such a reduction cannot be accomplished by a rational asymptotic expansion because for finite cg the advection timescale is always fast compared to the growth time. Moreover, such an expansion is inevitably about the onset of convective instability of the trivial state, and not about the absolute instability threshold
relevant to the finite container. We refer to [31 ] for a derivation of this type in a semi-infinite domain together with a discussion of the subtleties that arise in such an approach.
4. Discussion and conclusion
In this paper we have described the effects of boundaries on waves travelling in a preferred direction. The waves studied were nonlinear dissipative waves in systems forced uniformly in space. Because of the preferred direction
a wave incident on a boundary cannot be reflected. As a consequence a convectively unstable wave amplifies as
it travels towards the boundary, piles up against it, and ultimately decays. We can attribute this decay either to the absorbing nature of the boundary, or equivalently to the generation of small scales and phase mixing near it. The presence of the outer boundary is crucial to this development, however distant it may be. This is because with appropriate boundary conditions (e.g., no-flux) the boundary prevents the replenishment of the wave by growing
disturbances coming in from yet greater distances. If such incoming perturbations are permitted (e.g., by using a
semi-infinite domain instead of a bounded one) a convectively unstable mode can be sustained against decay [31 ]. Thus we arrive at the remarkable situation that a boundary placed where no "real action" apparently takes place has
a dramatic effect on the evolution of the system. Of course if the boundary is at a distance L, it takes a time of order L before the wave deficit created by the boundary propagates to the other wall, and the wall-induced dissipation
begins to dominate advection towards the wall. The behaviour described here should be contrasted with what happens when the system can support a reflected
wave. In such (bidirectional) systems the onset of convective instability again produces a wave that grows as it propagates towards the boundary. However, this time a steady state is possible when the amplitude amplification
over the travel distance L just balances the loss due to partial reflection at the wall, i.e.,
[rlelZL/cg ~ 1, (55)
where r is the reflection coefficient [6,7]. Thus/z = -(cg/L) In [r I, and this quantity represents the threshold shift due to the presence of the boundary. Note in particular that as L --+ ~ , I rl > 0, the threshold shift goes to zero, i.e., a marginally stable mode is present arbitrarily close to the convective threshold for the unbounded system. This mode is of course localized next to the boundary, much as the globally unstable mode shown in Fig. 2. In such a system the transition to absolute instability is associated with a quite abrupt expansion of the unstable mode into the body of the container. Consequently, this transition has been called a "filling" transition. However, nothing else of particular
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 69
significance takes place. Note that the limits Irl --+ 0, L --+ ec do not commute. Since the unidirectional systems
discussed in the present paper are necessarily characterized by Irl = 0, this simple argument already suggests that such systems will necessarily exhibit novel dynamics. Indeed, when the reflection coefficient is O(e)
-
and
0.30
0.25
0.20
0.15
0.10
0.05
0.00
3F - - ( 0 9 , q; IAo], k) = 0 (A.2) 3q
determine co, [Aol and ko. For the CGL equation these conditions yield
q4 -t- m3q 3 + m2q 2 + m lq + mo = 0, (A.3)
4q 3 q- 3m3q 2 q- 2m2q q- ml = 0, (A.4)
where m 1 . . . . . m4 are given in Eq. (30).
Successive elimination of all the powers of q yields a complex constraint on the values of the mi of the form
~(mo, ml , m2, m3) = 0, (A.5)
0.25
0.20
0.15
0.10
0.05
0.00
70 S.M. Tobias et aL /Physica D 113 (1998) 43-72
Appendix A. Locating the double root of the dispersion relation
In this appendix a brief note is included on the numerical method for detecting the double root of the dispersion
relation (29). The double root conditions
F(co, q; IAo[, k) = 0 (A.1)
omega
2.46 2.48 2.50
k
2.52 2.54
Fig. 17. The smallest distance D between any two roots of (A.3) plotted as a function of (a) the secondary frequency w and (b) the wave number k of the basic wave train.
-0.800 -0.790 -0.780 -0.770 -0.760 -0.750
-
S.M. Tobias et al./Physica D 113 (1998) 43-72 71
where
~(mo, m l , m2, m3)
= rn 4 - 3 3 2 8 m ~ m l m 3 - 2048mo3mZ 2 + 2304m3omzm 2 - 4 3 2 m 3 m 4
+ 2304mZmZm2 + 96mo m2 21m32 _ l152mZmlmazm3 + 144mZmlm2m~
+ 27mZmlm 5 +256mZm 4 2 3 2 _ 4 3 2 m o m 4 + , 6 4 m o m 2 m 3 144mom3m2m3
2 2 2 18mom2m2m 4 -- 58morn~m~ -- 64mom2m~ + 96mornlm2m 3
-- 16momlm4m3 q- 4momlm~m 3 q- 27m5m3 -- 18m4m2m 2 + 4m4m 4
+ 4rn~m32m3 3 2 3 (A.6) -- mlm2m 3.
In theory it ought to be possible now to use a root-f inding program to determine the values of co and k given the
value of £2 and hence of IA012. However, the expression for G(m0, m 1, m2, m3) is sufficiently complicated (with
individual terms that are large) that the standard root-f inding procedures are very unstable, i.e., i f the initial guess
for the value of co and k is not extremely accurate, the root-f inding procedure will not converge to the required root.
For this reason a different approach is used. Roots of Eq. (A.3) are calculated us ing a standard root-f inding
procedure for a range of values of co and k. For each choice of co and k the m i n i m u m distance 79(co, k) be tween any
two roots is calculated and plotted against co and k. Here
79(00, k) ---- min(I Ri (co, k) Rj (co, k) l), (A.7) i@j
where Ri is the i th root of Eq. (A.3). For the choice of parameters used in Fig. 17 (i.e., a = - 1 . 0 + 2.0i, = 1.0 + 0.45i) numer ica l solution of the nonl inear eigenvalue problem yields co = 2.49588,/Xc = 1.49222 at a
basic wave f requency £2 = 0.711511. These results can be compared with those read off the graph in Fig. 17. This
process is repeated for other values of ai, )vi and the theory is plotted against numer ica l results in Figs. 11 and 12
and summar ized in Table 1.
The double root for the dispersion relat ion (54) for the complex dynamo equations is found in an entirely analogous
manner .
References
[1] A. Bers, in: Basic Plasma Physics I, eds. A.A. Galeev and R.N. Sudan, Ch. 3.2 (North-Holland, Amsterdam, 1983). [2] L. Brevdo and T.J. Bridges, Absolute and convective instabilities of spatially periodic flows, Phil. Trans. Roy. Soc. London A 354
(1996) 1027-1064. [3] R.J. Briggs, Electron-Stream Interaction with Plasmas (MIT Press, Cambridge, MA, 1964). [4] R Btichel, M. Lticke, D. Roth and R. Schmitz, Pattern selection in the absolutely unstable regime as a nonlinear eigenvalue problem:
Taylor vortices in axial flow, Phys. Rev. E 53 (1996) 4764-4777. [5] A. Couairon and J.M. Chomaz, Pattern selection in the presence of a cross flow, Phys. Rev. Lett. (1997), submitted. [6] M.C. Cross, Traveling and standing waves in binary-fluid convection in finite geometries, Phys. Rev. Lett. 57 (1986) 2935-2938. [7] M.C. Cross and E.Y. Kuo, One-dimensional spatial structure near a Hopf bifurcation at finite wavenumber, Physica D 59 (1992)
90-120. [8] G. Dangelmayr and E. Knobloch, Dynamics of slowly varying wave trains in finite geometry, in: Nonlinear Evolution of Spatio-
Temporal Structures in Dissipative Continuous Systems, eds. F.H. Busse and L: Kramer, NATO ASI Series, Vol. B 225 (Plenum Press, New York, 1990) pp. 399-410.
[9] G. Dangelmayr, E. Knobloch and M. Wegelin, Hopf bifurcation with broken 0(2) symmetry, Europhys. Lett. 16 (1991) 723-729. [10] G. Dee, Dynamical properties of propagating front solutions of the amplitude equation, Physica D 15 (1985) 295-304. [11] G. Dee and J.S. Langer, Propagating pattern selection, Phys. Rev. Lett. 50 (1983) 383-386. [12] RJ. Deissler, Noise-sustained structures, intermittency, and the Ginzburg-Landau equation, J. Stat. Phys. 40 (1985) 371-395. [13] R.J. Deissler, External noise and the origin and dynamics of structure in convectively unstable systems, J. Stat. Phys. 54 (1989)
1459-1488.
-
72 S.M. Tobias et aL/Physica D 113 (1998) 43-72
[14] J.-E Eckmann and Th. Gallay, Front solutions for the Ginzburg-Landau equation, Commtm. Math. Phys. 152 (1993) 221-248. [ 15] EJ. Fox and M.R.E. Proctor, The effects of distant boundaries on pattern-forming instabilities, Phys. Rev. Lett. (1997), submitted. [16] H.E Goldstein, E. Knobloeh, I. Mercader and M. Net, Convection in a rotating cylinder. Part 1. Linear theory for moderate Prandtl
numbers, J. Fluid Mech. 248 (1993) 583-604. [17] E Huerre and EA. Monkewitz, Local and global instabilities in spatially developing flows, Ann. Rev. Fluid Mech. 22 (1990)473-537. [ 18] M.J. Landman, Solutions of the Ginzburg-Landau equation of interest in shear flow transition, Stud. Appl. Math. 76 (1987) 187-237. [19] H.W. Mfiller, M. Lficke and M. Kamps, Transversal convection patterns in horizontal shear flow, Phys. Rev. A 45 (1992) 3714-3726. [20] H.W. Mfiller and M. Tveitereid, Absolute and convective nature of the Eckhaus and zigzag instability, Phys. Rev. Lett. 74 (1995)
1582-1585. [21] K. Nozaki and N. Bekki, Pattern selection and spatiotemporal transition to chaos in the Ginzburg-Landau equation, Phys. Rev. Lett.
51 (1983) 2171-2174. [22] K. Nozaki and N. Bekki, Exact solutions of the generalized Ginzburg-Landau equation, J. Phys. Soc. Japan 53 (1984) 1581-1582. [23] M.R.E. Proctor and A.D. Gilbert, eds., Lectures on Solar and Planetary Dynamos (Cambridge University Press, Cambridge, 1994). [24] M.R.E. Proctor and E.A. Spiegel, Waves of solar activity, in: The Sun and Cool Stars: Activity, Magnetism, Dynamos,
eds. I. Tuominen, D. Moss and G. Riidiger, Lecture Notes in Physics, Vol. 380 (Springer, Berlin, 1991) pp. 117-128. [25] D. Roth, E Biichel, M. Lficke, H.W. Miiller, M. Kamps and R. Schmitz, Influence of boundaries on pattern selection in through-flow,
Physica D 97 (1996) 253-263. [26] M.E Schatz, D. Barkley and H.L. Swinney, Instability in a spatially periodic open flow, Plays. Fluids 7 (1995) 344-358. [27] M. Stix, Nonlinear dynamo waves, Astron. Astrophys. 20 (1972) 9-12. [28] J.T. Stuart and R.C. Di Prima, The Eckhaus and Benjamin-Feir resonance mechanisms, Proc. Roy. Soc. London A 362 (1978) 27-41. [29] S.M. Tobias, M.R.E. Proctor and E. Knobloch, The role of absolute instability in the solar dynamo, Astron. Astrophys. 318 (1997)
L55-L58. [30] W. van Saarloos, Front propagation into unstable states: Marginal stability as a dynamical mechanism for velocity selection, Phys.
Rev. A 37 (1988) 211-229. [31] D. Worledge, E. Knobloch, S. Tobias and M. Proctor, Dynamo waves in semi-infinite and finite domains, Proc. Roy. Soc. London A
453 (1997) 119-143.