Muscle, joint, and tendon contributions to the torque...
5
Muscle, joint, and tendon contributions to the torque profile of frog hip joint RICHARD L. LIEBER AND SCOTT D. SHOEMAKER Department of Orthopedics and Biomedical Sciences Graduate Group, University of California, San Diego and Veterans Administration Medical Center, San Diego, California 92161 Lieber, Richard L., and Scott D. Shoemaker. Muscle, joint, and tendon contributions to the torque profile of frog hip joint. Am. J. Physiol. 263 (Regulatory Integrative Comp. Physiol. 32): R586-R590, 1992.-The relative contributions of muscle force, moment arm, and tendon compliance were determined as a function of joint angle in the frog semitendinosus-hip joint system. Muscle, joint, and tendon properties were individually measured and then combined to predict the torque generated at the hip joint as a function of joint angle (i.e., the hip torque profile). Predicted torques were then compared to experimen- tally measured torques using a stepwise regression model to quantify the relative importance of muscle, joint, and tendon contributions to the hip torque profile. Variation in moment arm accounted for 74% of the variability observed in the hip torque profile, while addition of the muscle’s intrinsic sarco- mere length-tension property accounted for an additional 19% of the torque profile variability. Tendon compliance, which per- mitted a small amount of sarcomere shortening, accounted for only about 4% of the torque profile variability. We conclude that in this muscle-joint system, the relative fiber length-to-moment arm ratio is the major determinant of the shape of the isometric joint profile. The fiber length-to-moment arm ratio in other mammalian systems is also discussed. fiber length-to-moment arm ratio; muscle-joint interaction; joint torque TORQUE PRODUCED at a joint results from a combina- tion of factors including muscle, tendons, and bones; muscles generate forces that are transmitted to bones via tendons. However, although a great deal is known about basic muscle fiber properties, (7), the tendons to which they attach (3), and the kinematics of the joints about which bones rotate (1, 12), much less is known about the interaction between these structures. The relationship between isometric torque and knee joint angle (i.e., the torque profile) in the frog hindlimb results from the interaction between skeletal muscle and joint properties, and is not simply a direct reflection of either muscle or joint properties alone (8). In fact, Lieber and Boakes (8) demonstrated that the joint angle where maximum torque occurs is neither the joint angle at which the muscle develops maximum force nor the angle at which the moment arm is maximum. Sim- ilarly, in a theoretical model of human lower limb torque production, Hoy et al. (6) showed that muscles usually generate their maximum force at joint angles which are different from the angle at which joint torque is maxi- mum. The fact that such unexpected results often arise, despite the fact that the properties of the system com- ponents are well known, highlights the importance of studying the interaction between components. The complex nature of the interaction between skel- etal muscles and tendons has also be,en recently eluci- dated. For example, using nominal values for tendon stiffness and muscle force, Zajac (14) described the in- tricate interaction between muscles and their tendons: R586 “musculotendinous actuators” can have properties that are qualitatively different from the properties of the muscle alone. We recently obtained experimental evi- dence in support of this interaction showing that frog semitendinosus muscle sarcomeres can shorten consid- erably due to their series arrangement with the tendon (9, w* Despite these demonstrations of the intricate nature of muscle-joint and muscle-tendon interaction, interac- tion among all three systems has not been investigated in a single joint system. Therefore, the relative role that muscles, joints, and tendons play in determining the torque profile is not known. Thus the purpose of this study was to identify the relative contribution of muscle, joint, and tendon properties to the experimentally mea- sured torque profile of the frog hip joint. A brief version of this work was reported earlier (11). METHODS The experimental model is the semitendinosus muscle and the hip joint of the frog (Rana pipiens). This model was chosen because of the frog’s well-defined sarcomere length-tension re- lationship (5) and because of our previous experiments that defined the biomechanical properties of the frog tendon (9, 10). The protocol was designed such that muscle, joint, and tendon properties could be individually determined, mathematically combined, and compared with a simultaneously measured torque. Frog semitendinosus muscle preparation. Frogs were killed by double pithing, and then the semitendinosus muscle, pelvis, femur, and tibia were isolated as previously described (n = 15; Ref. 8). Care was taken to keep the hip joint capsule intact and to maintain the complex in normal frog Ringer (NFR) solution (in mM) 115 NaCl, 2.5 KCl, 2.15 Na,HPO*, 1.8 CaCl,, and 0.85 NaH,PO, adjusted to pH 7.0 and maintained at 10°C through- out the dissection. The pelvis was secured to the rotating por- tion of a specially designed jig that enabled hip joint rotation to occur while maintaining the muscle and femur in a constant position relative to the force transducer secured to the distal femur (Fig. I). The entire jig containing the muscle bone com- plex was mounted on a micromanipulator and immersed in NFR from a chilled l,OOO-ml reservoir that circulated at a rate of approximately 50 ml/min. In this setting, the preparation was stable over ~6 h. Knee joint angle was maintained at 90” of flexion and motion was restricted to the frontal plane using a Kirschner wire splint. Two cylindrical platinum electrodes attached to a second micromanipulator straddled the muscle, enabling direct muscle activation. Muscle activation effected hip joint extension torque, which was measured by an orthogonally placed force transducer (model 400A, Cambridge Technology, Cambridge, MA) connected to the distal femur via a 6-O suture. Above this physiological testing apparatus was a video camera that enabled measurement of musculotendinous length and knee angle during repetitive contractions (see below). This was necessary, since muscle contraction caused slight amounts of joint rotation (L-3”) and joint compression (0.5-2.0 mm). on July 19, 2006 ajpregu.physiology.org Downloaded from
Transcript of Muscle, joint, and tendon contributions to the torque...

Muscle, joint, and tendon contributions to the torque profile of frog hip joint
RICHARD L. LIEBER AND SCOTT D. SHOEMAKER Department of Orthopedics and Biomedical Sciences Graduate Group, University of California, San Diego and Veterans Administration Medical Center, San Diego, California 92161
Lieber, Richard L., and Scott D. Shoemaker. Muscle, joint, and tendon contributions to the torque profile of frog hip joint. Am. J. Physiol. 263 (Regulatory Integrative Comp. Physiol. 32): R586-R590, 1992.-The relative contributions of muscle force, moment arm, and tendon compliance were determined as a function of joint angle in the frog semitendinosus-hip joint system. Muscle, joint, and tendon properties were individually measured and then combined to predict the torque generated at the hip joint as a function of joint angle (i.e., the hip torque profile). Predicted torques were then compared to experimen- tally measured torques using a stepwise regression model to quantify the relative importance of muscle, joint, and tendon contributions to the hip torque profile. Variation in moment arm accounted for 74% of the variability observed in the hip torque profile, while addition of the muscle’s intrinsic sarco- mere length-tension property accounted for an additional 19% of the torque profile variability. Tendon compliance, which per- mitted a small amount of sarcomere shortening, accounted for only about 4% of the torque profile variability. We conclude that in this muscle-joint system, the relative fiber length-to-moment arm ratio is the major determinant of the shape of the isometric joint profile. The fiber length-to-moment arm ratio in other mammalian systems is also discussed.
fiber length-to-moment arm ratio; muscle-joint interaction; joint torque
TORQUE PRODUCED at a joint results from a combina- tion of factors including muscle, tendons, and bones; muscles generate forces that are transmitted to bones via tendons. However, although a great deal is known about basic muscle fiber properties, (7), the tendons to which they attach (3), and the kinematics of the joints about which bones rotate (1, 12), much less is known about the interaction between these structures.
The relationship between isometric torque and knee joint angle (i.e., the torque profile) in the frog hindlimb results from the interaction between skeletal muscle and joint properties, and is not simply a direct reflection of either muscle or joint properties alone (8). In fact, Lieber and Boakes (8) demonstrated that the joint angle where maximum torque occurs is neither the joint angle at which the muscle develops maximum force nor the angle at which the moment arm is maximum. Sim- ilarly, in a theoretical model of human lower limb torque production, Hoy et al. (6) showed that muscles usually generate their maximum force at joint angles which are different from the angle at which joint torque is maxi- mum. The fact that such unexpected results often arise, despite the fact that the properties of the system com- ponents are well known, highlights the importance of studying the interaction between components.
The complex nature of the interaction between skel- etal muscles and tendons has also be,en recently eluci- dated. For example, using nominal values for tendon stiffness and muscle force, Zajac (14) described the in- tricate interaction between muscles and their tendons: R586
“musculotendinous actuators” can have properties that are qualitatively different from the properties of the muscle alone. We recently obtained experimental evi- dence in support of this interaction showing that frog semitendinosus muscle sarcomeres can shorten consid- erably due to their series arrangement with the tendon (9, w*
Despite these demonstrations of the intricate nature of muscle-joint and muscle-tendon interaction, interac- tion among all three systems has not been investigated in a single joint system. Therefore, the relative role that muscles, joints, and tendons play in determining the torque profile is not known. Thus the purpose of this study was to identify the relative contribution of muscle, joint, and tendon properties to the experimentally mea- sured torque profile of the frog hip joint. A brief version of this work was reported earlier (11).
METHODS
The experimental model is the semitendinosus muscle and the hip joint of the frog (Rana pipiens). This model was chosen because of the frog’s well-defined sarcomere length-tension re- lationship (5) and because of our previous experiments that defined the biomechanical properties of the frog tendon (9, 10). The protocol was designed such that muscle, joint, and tendon properties could be individually determined, mathematically combined, and compared with a simultaneously measured torque.
Frog semitendinosus muscle preparation. Frogs were killed by double pithing, and then the semitendinosus muscle, pelvis, femur, and tibia were isolated as previously described (n = 15; Ref. 8). Care was taken to keep the hip joint capsule intact and to maintain the complex in normal frog Ringer (NFR) solution (in mM) 115 NaCl, 2.5 KCl, 2.15 Na,HPO*, 1.8 CaCl,, and 0.85 NaH,PO, adjusted to pH 7.0 and maintained at 10°C through- out the dissection. The pelvis was secured to the rotating por- tion of a specially designed jig that enabled hip joint rotation to occur while maintaining the muscle and femur in a constant position relative to the force transducer secured to the distal femur (Fig. I). The entire jig containing the muscle bone com- plex was mounted on a micromanipulator and immersed in NFR from a chilled l,OOO-ml reservoir that circulated at a rate of approximately 50 ml/min. In this setting, the preparation was stable over ~6 h. Knee joint angle was maintained at 90” of flexion and motion was restricted to the frontal plane using a Kirschner wire splint.
Two cylindrical platinum electrodes attached to a second micromanipulator straddled the muscle, enabling direct muscle activation. Muscle activation effected hip joint extension torque, which was measured by an orthogonally placed force transducer (model 400A, Cambridge Technology, Cambridge, MA) connected to the distal femur via a 6-O suture. Above this physiological testing apparatus was a video camera that enabled measurement of musculotendinous length and knee angle during repetitive contractions (see below). This was necessary, since muscle contraction caused slight amounts of joint rotation (L-3”) and joint compression (0.5-2.0 mm).
on July 19, 2006 ajpregu.physiology.org
Dow
nloaded from

DETERMINANTS OF FROG HIP TORQUE PROFILE R587
To joint angle indicator
,, To stimulator
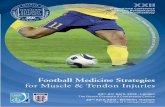
Fig. 1. Experimental apparatus used to measure joint torque, sarcomere length, and moment arm in frog hind- limb. Force transducer is arranged such that hip extension moment resulting from semitendinosus contraction is measured at the distal femur. Note video camera for mo- ment arm measurement and photodiode array for sarco- mere length measurement are placed above the chamber and not shown. [From Mai and Lieber (13).]
Ringer’s solution
Sarcomere length measurements. Sarcomere lengths were measured at each joint angle by transilluminating the muscle with a 5 mW HeNe laser oriented normally to the long axis of the muscle. The laser beam was guided using optical-quality mirrors and attenuated as needed using a linear neutral-density gray wedge mounted on a micromanipulator (model 4320,
.18 -
.16 -
.14 -
z^ . ;.12. ~
2 ,a
LLo.lO- [
Melles Griot, Irvine, CA). Sarcomere length was calculated from the distance between the zeroth and first diffraction orders. At
i-5 A 3.08.
z .
each joint angle, three measurements of sarcomere length were made in the proximal, middle, and distal ST regions and aver- aged to yield a single value for sarcomere length at that angle.
Experimentalprotocol. Hip joint angle was initially set to 90’ and the muscle was maximally stimulated at 60 Hz with a field
c F .06.
strength 20 V/cm and a pulse duration of 3 ms for a train that lasted - 1.2 s. The muscle was activated at exactly 6-min inter-
0 12 24 36 48 60 72 84 96 108
Time (minutes)
1 - T
120 132
vals’ to ensure uniform recovery between contractions and to Fig. 2. Summary of the experimental protocol. Contractions are elicited enable sufficient time with which to measure sarcomere length. at 6-min intervals throughout experiment. The 10 contractions ob- All contractile events were videotaped for off-line moment arm tained at joint angle of 90” (open squares) were used to correct for
analysis. muscle fatigue or specimen deterioration. Each symbol represents mean
Initially, the muscle was contracted six times at a hip joint ’ SE for l5 ‘pecimens* angle of 90” (measured as the included angle between the pos- terior surface of the femur and the spine) to standardize the Double pulses were used to compensate for the relatively com- starting conditions. Then, hip joint angle was varied from 30” to pliant muscle-tendon unit and long sutures (2). Then the muscle 140” in IO” increments with sarcomere length measured at each was maximally stimulated at 60 Hz for 1.2 s, yielding the value angle. Finally, hip joint angle was returned to 90” and three for maximum tetanic tension (P,). After determination of P,, stimulations were effected to correct for fatigue on a muscle-by- the muscle was excised, tendon length was measured, and the muscle basis (Fig. 2). In practice, this was not necessary as muscle was fixed in 10% phosphate-buffered Formalin for ar- muscles did not fatigue significantly over the ninety-minute chitectural determination (8). testing period (P > 0.4). Moment arm measurement. &loment arms were measured by
After the last contraction at 90”, the distal ST tendon was videotaping the configuration of the muscle-joint complex dur- directly connected to the force transducer with 6-O suture. ing the contraction for which torque was measured, following Through the use of double pulses, the muscle was contracted An et al. (1). It was necessary to make these measurements from and set to the length at which tension was maximum (L,). videotaped records due to joint laxity which permitted slight
on July 19, 2006 ajpregu.physiology.org
Dow
nloaded from

R588 DETERMINANTS OF FROG HIP TORQUE PROFILE
joint rotation and compression during contractions (see above). Then, by measuring the change in muscle-tendon length and joint angle as the joint was rotated throughout its range of motion, the instantaneous moment arm could be calculated ac- cording to the relationship
dS
r=z (0
where r is moment arm (mm), + is hip joint angle (radians), and s is muscle-tendon length (mm).
Such raw muscle-tendon length vs. joint-angle curves were fit to a third-order polynomial, which was then differentiated to yield moment arm vs. joint angle using Eq. 1. Similar moment arms were obtained using other equations and polynomials of different orders. However, since the correlation coefficients for the raw data curve fits using most equations always exceeded 0.93 (range 0.93-0.99), third-order polynomials were used for convenience.
Data analysis. For each specimen, sarcomere length vs. joint angle, joint torque vs. joint angle, muscle moment arm vs. joint angle, P,, tendon length, and muscle fiber length were determined. It was thus possible to compare the mathematical combination of these variables with the experimentally mea- sured joint torque. Joint torque as a function of hip joint angle [i.e., ~((a)] was calculated as
7,&v = F, l w9 (2)
where F, was the force measured at the transducer secured to the femur, and t(a) was the distance from the point of trans- ducer attachment along the femur to the instantaneous joint center.
To quantify the relative contribution of each parameter to the experimentally measured torque profile (obtained using Eq. 2), three torque profiles were calculated using muscle, joint, and tendon parameters sequentially. First, using only muscle maximum tetanic tension and joint kinematics
71w = p , , l rw (3)
where r(a) was the muscle moment arm function determined experimentally. Second, using joint kinematics and the muscle length-tension property
7&D) = PO l r(a) 0 %P,,(SL) (4)
where %P,,(SL) represented the relative muscle force as a func- tion of sarcomere length (5). Finally, using joint kinematics, muscle properties, and correcting for tendon compliance
73(+) = PO l r(a) l %P,(SL, P) (5)
where %P,,( SL, P) represented the sarcomere length-tension relationship (5), which was corrected for the change in sarco- mere shortening due to tendon compliance (9). Briefly, this formula was obtained by generating loadstrain curves on iso- lated semitendinosus muscle-tendon units and then formulating a computer model to predict sarcomere shortening as a function of tension (cf., Fig. 7, Ref. 9).
To compare the calculated results using Eqs. 3-5 with the experimental results from Eq. 2, the coefficient of determina- tion between each of Eqs. 3-5 and Eq. 2 were calculated using standard statistical equations. Each data set was screened for normality and skew to ensure appropriate application of this parametric equation.
RESULTS
Muscle and joint properties. The plot of sarcomere length vs. hip joint angle follows approximately the same
relationship described previously by Mai and Lieber (13). With the hip near full extension, sarcomere length is only -2.0 pm, whereas near full flexion, sarcomere length in- creases to -3.0 pm (Fig. 3). According to the sarcomere length-tension relationship reported by Gordon et al. (5), these data predict that the muscle would develop maximal tension with the hip joint extended to 20-40’ and only -50% maximum with the joint flexed.
Kinematically, the relationship between hip joint mo- ment arm and joint angle was well described by an inner- vated parabola (Fig. 4). Maximum moment arm occurs at a joint angle of 70-80” and decreases at larger and smaller angles. Note that moment arm varies greatly throughout the range of motion and is thus likely to strongly influ- ence the nature of the torque profile.
The experimentally measured torque profile demon- strates a relatively strong dependence of torque on joint angle (Fig. 5). Near full extension (30”), torque is only about one-third of that demonstrated at the optimal joint angle of 70”. As the joint is further flexed, torque drops precipitously to a level equivalent to only - 15% of the torque at the optimal joint angle. Interestingly, optimal joint angle is approximately the same as the angle at which maximum moment arm occurs but is not at the same angle where muscle force is maximal.
Comparison between experimental and calculated torque profiles. Muscle, tendon, and joint angle contributions to the torque profile were calculated as described in METH- ODS. First, torque was calculated as the simple product of P, and r(@) (Eq. 3; Fig. 5A). Note that the use of r(@) and P, alone provides a fair approximation of the observed torque-angle relationship. This suggests that moment arm plays a large part in determination of the torque profile and is supported by the relatively large coefficient of determination (r2 = 0.74, P c 0.01). Both peaks occur at -70’ of flexion and decreased at larger and smaller angles. However, the curves deviated from one another, especially at larger hip joint angles.
When the sarcomere length-tension relationship is in- cluded (using Eq. 4), the fit between calculated and ob- served torque improves (Fig. 5B, r2 = 0.93, P < 0.01).
A 1.2 E
E' 1.1 _- 1
2 E l.O-
-6 e 0.9-
5 , .- 2 0.8~ + Muscle Force L e Sarcomere Length . -I
Y- . - g 0*7-
z k 0.6-
(1, . 0 u) 0.5-
'0.4 . , . , . , . , . , , , 7 , - 11.8
0 20 40 60 80 100 120 140 160
Hip Joint Angle (degrees) Fig. 3. Relationship between sarcomere length vs. hip joint angle (closed circles, right vertical scale) and relative muscle force vs. hip joint joint angle (open circles, left vertical scale). SE contained within the symbol.
on July 19, 2006 ajpregu.physiology.org
Dow
nloaded from

DETERMINANTS OF FROG HIP TORQUE PROFILE R589
32.0
z- E 30.0 - r 5 28.0
5
-I
5 26.0
z
8 24.0 0
0
'3 22.0 z
7.0
6.0
5.0 z-
-L. 4.0 E
2
3.0 E
E 2.0 O
e Muscle-Tendon Leng 2
e Moment Arm 1.0
20.0 0.0 0 20 40 60 80 100 120 140 160
Hip Joint Angle (degrees)
Fig. 4. Relationship between moment arm vs. hip joint angle (closed circles, right vertical scale) and muscle-tendon length vs. hip joint joint angle (open circles, left vertical scale). Moment arm was calculated using Eq. I (METHODS) based on raw length vs. joint angle data. (Raw data were curve fitted and differentiated to yield the moment arm curve).
“1 B
alone 0 20 40 60 80 100 120 140 160
Therefore, while the variation in moment arm ac- 4 1 C counts for -74% of the observed experimental variabil- ity, the addition of intrinsic muscle properties accounts for an additional 19% of the variability. Finally, the effect z3 z of including tendon compliance (using Eq. 5) is relatively E small. Predicted sarcomere length changes due to tendon z2 compliance rarely exceed 0.2 pm, and this occurs only in $ the region of the torque profile where muscle force is 21 + maximum (Fig. 5C). Inclusion of tendon compliance sig- nificantly increased the correlation between experimental and predicted torques, but only by 4% (r2 = 0.97, P <
0.05). Upon inclusion of all available experimental data, we described 97% of the experimental variability.
04 0 20 40 60 80 100 120 140 160
Hip Joint Angle (degrees)
Fig. 5. Comparison between experimentally measured hip torque pro- files (open circles) and calculated profiles (closed circles). A: torque profile calculated using only maximum tetanic tension (P,,) and moment arm (r2 = 0.74, P c 0.01). B: torque profile calculated using PO, moment arm, and muscle length-tension relationship (r2 = 0.93, P < 0.01). C: torque profile calculated using PO, moment arm, muscle length- tension relationship, and correction for tendon compliance (r2 = 0.98, P < 0.05).
DISCUSSION
The purpose of this paper was to use measured muscle, tendon, and joint properties to provide a complete de- scription of the semitendinosus isometric torque profile in the frog hindlimb. We found that, in this preparation, the moment arm dominated the nature of the torque curve accounting for XO% of the variability in the torque profile. The intrinsic isometric properties of the muscle, i.e., the length-tension relation, explained an additional 20% of the variability, whereas tendon com- pliance accounted for only a few percent of the variability in the data. Thus, in the frog semitendinosus hip-torque generating system, the relative importance of the various factors in determining the shape of the torque profile was, in order: moment arm > muscle intrinsic properties > tendon properties.
Muscle-joint interaction. While this study provides a relatively complete description of the relative contribu- tion of joint angle, semitendinosus muscle force and ten- don compliance to the torque about the frog hip joint, it would be inappropriate to generalize this result to all muscle-joint systems. This caution is based on the fact that the change in sarcomere length as a function of joint angle is a direct function of the ratio between muscle fiber length and moment arm. As the fiber length-to-moment arm ratio increases, sarcomere length changes a smaller amount for a given joint angle rotation resulting in less
muscle force change. Consequently, as this ratio increases the intrinsic muscle length-tension properties contribute less to the torque profile. In the frog semitendinosus hip- joint system, this ratio is approximately 3:1 (15 mm fiber length/6 mm moment arm). It is clear, however, that fiber length-to-moment arm ratio is not a constant for all mus- cle-joint combinations. For example, in the human lower limb Hoy et al. (6) have calculated that the fiber length- to-moment arm ratio varies from -0.8 (for the soleus muscle acting at the ankle), to -80 (for the gluteus me- dius acting at the hip). We would thus predict gluteus medius sarcomere length change during hip rotation to be relatively unimportant compared with the kinematics of the hip joint, whereas soleus fiber sarcomere length change during ankle rotation would be significantly more important.
Muscle-tendon interaction. Similarly, it is also not sur- prising that tendon compliance had a relatively small effect on the torque profile of the frog hip joint. In his recent review, Zajac (14) suggested that the compliance of a muscle-tendon actuator was dependent on the relative
on July 19, 2006 ajpregu.physiology.org
Dow
nloaded from

R590 DETERMINANTS OF FROG HIP TORQUE PROFILE
length of the muscle fibers compared with the tendon. We recently performed explicit measurements of the compli- ance of the connective tissue in series with the frog semi- tendinosus muscle fibers and found them to be of varying stiffnesses along the length of the connective tissue. For example, the aponeurosis was five times as compliant as the tendon near the bone-tendon junction (10). With the use of these biomechanical data, sarcomere length was predictably shortened at the expense of the tendon lengthening under the conditions of a fixed-end contrac- tion at various muscle-tendon lengths (9). Sarcomere length shortening was found to be relatively small with the maximum amount of length shortening -0.3 pm at an initial sarcomere length of 2.45 pm. Using the theo- retically derived relationship between sarcomere length change and initial sarcomere length, we predicted the amount of sarcomere length shortening that must have occurred during our experimentation (because we mea- sured the starting sarcomere length under all conditions) and therefore determined the relative influence of this magnitude of tendon lengthening. Tendon compliance in this system had an almost negligible effect, explaining only -3% of the data. That O-O.3 pm of sarcomere short- ening would have such a small effect on the torque profile is not surprising. This is because the region of the torque profile in which maximum sarcomere shortening oc- curred is that region from 20 to 60” (Fig. 3) where sarco- mere length varied from ~2.0 to 2.3 pm and muscle force was maximum. Since the length-tension curve has a pla- teau over the range 2.0-2.2 km, sarcomere shortening at these lengths results in no force change. In addition, sar- comeres shortening from ~2.0 pm to 1.8 pm would only change force by w 5%. This relatively small force change is dominated by the large change in moment arm that occurs at these angles. This result is not necessarily the rule for any muscle-joint-tendon system, but occurs in this particular system due to the relative angles at which muscles and joints generated their maximum effects in conjunction with the compliance of the tendinous attach- ments.
While we have demonstrated the relative importance of muscle, joint, and tendon properties in determining the torque profile of the semitendinosus-hip complex, a num- ber of other muscle-joint systems need to be studied to elucidate the general design principles by which the mus- culoskeletal system operates. Such an understanding is fundamental to complete description of the physiological basis of performance as well as in providing the rationale for surgical transposition of skeletal muscles.
The authors thank Alex M. Green for technical assistance and the reviewers for their excellent comments.
This work was supported by the Veterans Administration and Na- tional Institute of Arthritis and Musculoskeletal and Skin Diseases Grants AR-35192 and AR-40050.
This research was performed in partial fulfillment of the UCSD School of Medicine requirements for the Independent Study Project.
Address for reprint requests: R. L. Lieber, Dept. of Orthopedics (V-151), University of California San Diego School of Medicine and Veterans Administration Medical Center, 3350 La Jolla Village Dr., San Diego, CA 92161.
Received 20 August 1991; accepted in final form 4 March 1992.
REFERENCES
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
An, K. N., Y. Ueba, E. Y. Chao, W. P. Cooney, and R. L. Linscheid. Tendon excursion and moment arm of index finger muscles. J. Biomech. 16: 419-425, 1983. Bahler, A. S., J. T. Fales, and K. L. Zierler. The dynamic properties of mammalian skeletal muscle. J. Gen. Physiol. 51: 69-384, 1968. Butler, D. L., E. S. Grood, F. R. Noyes, and R. F. Zernicke. Biomechanics of ligaments and tendons. In: Exercise and Sport Sciences Reviews, edited by R. S. Hutton. Philadelphia, PA: Fran- klin Institute Press, 1978, vol. 6. Chao, E. Y., and B. F. Morrey. Three-dimensional rotation of the elbow. J. Biomech. 11: 57-73, 1978. Gordon, A. M., A. F. Huxley, and F. J. Julian. The variation in isometric tension with sarcomere length in vertebrate muscle fibers. J. Physiol. Lond. 184: 170-192, 1966. Hoy, M. G., F. E. Zajac, and M. E. Gordon. A musculoskeletal model of the human lower extremity: the effect of muscle, tendon, and moment arm on the moment-angle relationship of musculo- tendon actuators at the hip, knee, and ankle. J. Biomech. 23: 157-169, 1990. Huxley, A. F. Muscular contraction (Review lecture). J. Physiol. Lond. 243: l-43, 1974. Lieber, R. L., and J. L. Boakes. Sarcomere length and joint kinematics during torque production in the frog hindlimb. Am. J. Physiol. 254 (Cell Physiol. 23): C759-C768, 1988. Lieber, R. L., C. G. Brown, and C, L. Trestik. Model of muscle-tendon interaction during frog semitendinosus fixed-end contractions. J. Biomech. 25: 421-428, 1992. Lieber, R. L., M. E. Leonard, C. G. Brown, and C. L. Trestik. Frog semitendinosus tendon load-strain and stress- strain properties during passive loading. Am. J. Physiol. 261 (Cell Physiol. 30): C86-C92, 1991. Lieber, R. L., S. D. Shoemaker, and A. M. Green. Sarco- mere length, hip joint moment arm and muscle force used as torque predictors in the frog hindlimb (Abstract). Physiologist 33: A120, 1990. London, J. T. Kinematics of the elbow (Abstract). J. Bone Jt. Surg. Am. Vol. 63: 529-535, 1981. Mai, M. T., and R. L. Lieber. Interaction between semitendi- nosus muscle and knee and hip joints during torque production in the frog hindlimb. J. Biomech. 23: 271-279, 1990. Zajac, F. E. Muscle and tendon: properties, models, scaling and application to biomechanics and motor control. CRC Crit. Rev. Biomed. Eng. 17: 359-411, 1989.
on July 19, 2006 ajpregu.physiology.org
Dow
nloaded from