
Modelling Uncertain Implication Rules Theory
7
Mo de ll in g Un ce rt ain Im pl ic at io n u l ~ s Theory in Evidence Alessio Benavoli Engine ering Division SEL EX Sis temi Integra ti Italy benavoli@gmail com Luigi Chis ci DSI Universita di Firenze Italy chisci@dsLunifi it Alfonso Far ina Engi neer ing Division SELEX Sis temi Int egr ati Italy afarina@sele x si com Branko Ristic ISR Divi sion DSTO Australia branko ristic@dsto defence gov au Abstract Often knowledge from human experts is expressed in the form of uncertain implication rules, such as i f A then B with a certain degree of confidence. Therefore, it is important to include such a representation of knowledge into the process of reasoning under uncertainty. Incorporating inference rules based n the material implication of propositional logic into the evidence theory framework e.g. Dempster -Shafer, Smets , Dezert-Smarandache theory etc.) is conceptually simple, which is not the case with classical probability theory. In this paper, a transformation for converting uncertain impl ication rules into an evidence theory framework will be presented and it w ll be shown that it satisfie s the main propert es of lo gical implication, namely refl exivity, transitivi ty and contrapositi vity. Keywords: uncertain implication rules, evidence theory, Dempst er- Shafer , logi cal axioms. INTRODUCTION Often knowledge from human experts is expressed in the form unce rtai n implication rules, such as if AthenB with a cert ai n de gr ee of confidence. Ther e are essential ly two types of unc ertai n implic ati on rules. An implication rule i f A then B , which holds with a probability such that E [Q 1] and o Q :::; 1 will be referred to as 1 do f uncertain implication rule. E [Q ] means that the implication rule is believed true wi th probability Q and 1 - Q represen ts the unc ertainty. The term 1 do f means that unce rt ainty can be represented by means of a single parameter 1 degree of fre edo m), i. e. Q . Conversely, an implicat ion rule if AthenB , whichholdswith a prob abil ity p suchthat p E [Q 8] with 0 :::; Q S; 8 1 will be referred to as do f unce rtain impl ication rule. E a ] me ans that the implic ati onrule is believed tr ue with degree Q fa lse wi th degree 1 { and uncertain with degree {3 Q. Note that , in the special case {3 = 1 the do f uncertain implic ation rules reduce to 1 d of rules. Since human experts repres ent thei r knowledge in the form of unce rtai n implicat ion rules [1]-[4], itisimportanttoinclu de such a representation of knowledge into the process of reasoning under uncertainty. Incorpor at ing inference rules based on the material implication of propositional logi c into evidencetheoryisconceptuallysimple, whi ch is not the case with cla ssicalprobabili ty theory . Assuming that the probabil ity of the implicat ion i f A then B is equal to the conditional probability of B given A leads to the triv ial ization res ult s of Lewis, i.e., the probability can then only take three values [5 ]. Under thi s ass ump tion , probabil itytheory dege nera tes int o a useless theory. In the evidence theory framework, on the contra ry, one canassume th e equali ty between the implication and the conditional belief and still avoid th e trivializati on [3]. An implication rule can be expressed in evidence theory by me ns of a BasicBeliefAssignment BBA) functio n using the pri nciple of mini mum commitme nt [3] and it s inst antiation ref erredto as the balloo nin g extension [3]. Transfor mations to convert 1 do f and do f uncertain implication rules into the evidence theory framework have been presented in [3] and, resp ecti vely, [6]. In this paper, it is shown that the transformation in [6] for 2 do f uncertain implication rules does not satisfy two main properties of logical implic ati on, namely transitivity and contrapositivity A ne transformation for converting do f uncertain impl ication rules in to BBA fu nc ti ons is presented and it is proved that, in contrast, this transformation satis f ie s tr ansi ti vi ty and contrapositivity. Th e fulfilme nt of these properties guarantees that th e transformation is coherent, in the sense that the logical axioms continue to hold also in the BBA function domain and, thus, that the transformation does not alter the information. Maintaining coherence of information is a fundamental requirement in any data fusion process. Notice that, since the Dezert-Smarandache theory includes th e Dempster-Shafer theory as a particular case and it reduces to the Dempster-Shafer theory when the exclusivity of all elements in the fr ame is assumed [7], the transf ormation to conver tuncertain implication rules in to BBA functions can al so be used in th e Dezert-Smarandache theory framework. II . BACKGROUND ON EVIDENCE THEORY Let denote the set of possible values th frame of a variable x Whenmodellingreal worldproble ms weoftendeal with many interrelated variables and the re sulting joint frame is multi-dimensional. All the vari ables con sid ere d throughout the paper ha ve fin ite frames. Let D denote a set of variables. The Cartesianproduct en ~ x { : XED} is the frame of D. The el ements of en are called the configurations of D. The beliefs [8] about the true value of D are expr essed on the sub set s of en The ba sic belief assi gnmen t BBA) m D on domain D is a multivariate belief function which assigns to
-
Upload
science2010 -
Category
Documents
-
view
221 -
download
0
Transcript of Modelling Uncertain Implication Rules Theory

8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 1/7
Modelling Uncertain Implication u l ~ s
Theory
in
Evidence
Alessio Benavoli
Engineering Division
SELEX Sistemi Integrati
Italy
benavoli@gmail com
Luigi Chisci
DSI
Universita
di
Firenze
Italy
chisci@dsLunifi it
Alfonso Farina
Engineering Division
SELEX Sistemi Integrati
Italy
afarina@selex si com
Branko Ristic
ISR Division
DSTO
Australia
branko ristic@dsto defence gov au
Abstract Often knowledge from human experts is expressed
in the form of uncertain implication rules, such as i f A then B
with a certain degree of confidence. Therefore, it is important
to include such a representation of knowledge into the process
of reasoning under uncertainty. Incorporating inference rules
based on the material implication of proposi tional logic into
the evidence theory framework e.g. Dempster-Shafer, Smets,
Dezert-Smarandache theory etc.)
is
conceptually simple, which
is not the case with classical probabili ty theory. In this paper,
a transformation for converting uncertain implication rules into
an evidence theory framework will be presented and it will be
shown that it satisfies the main properties of logical implication,
namely reflexivity, transitivity and contrapositivity.
Keywords: uncertain implication rules, evidence theory,
Dempster-Shafer, logical axioms.
INTRODUCTION
Often knowledge from human experts is expressed in the
form of uncertain implication rules, such
as
i f
A then B with
a certain degree
of
confidence. There are essentially two types
of
uncertain implication rules. An implication rule i f A then
B , which holds with a probability such that E [Q 1] and
o Q :::; 1 will be referred to as 1do f uncertain implication
rule. E
[Q ]
means that the implication rule is believed
true with probability
Q
and 1 -
Q
represents the uncertainty.
The term 1do f means that uncertainty can be represented by
means of a single parameter 1 degree of freedom), i.e. Q .
Conversely, an implication rule
if
A thenB , which holds with
a probability p such that p
E
[Q 8]
with 0 :::; Q S; 8 1 will
be referred to as
do f
uncertain implication rule.
E a ]
means that the implication rule
is
believed true with degree Q
false with degree 1
{
and uncertain with degree {3
Q . Note
that, in the special case
{3
=
1
the
do f
uncertain implication
rules reduce to 1dof rules.
Since human experts represent their knowledge in the form
of
uncertain implication rules
[1]-[4],
it is important to include
such a representation of knowledge into the process
of
reasoning under uncertainty. Incorporating inference rules
based on the material implication
of
propositional logic into
evidence theory is conceptually simple, which
is
not the case
with classical probability theory. Assuming that the probability
of the implication i f A then B is equal to the conditional
probability of B given A leads to the trivialization results
of
Lewis, i.e., the probability can then only take three values
[5]. Under this assumption, probability theory degenerates into
a useless theory. In the evidence theory framework, on the
contrary, one can assume the equality between the implication
and the conditional belief and still avoid the trivialization [3].
An implication rule can be expressed in evidence theory
by means of a Basic BeliefAssignment BBA) function using
the principle
of
minimum commitment
[3]
and its instantiation
referred to as the ballooning extension [3]. Transformations to
convert 1
do f
and
do f
uncertain implication rules into the
evidence theory framework have been presented in [3] and,
respectively, [6].
In this paper, it is shown that the transformation in
[6]
for 2
do f
uncertain implication rules does not satisfy two
main properties of logical implication, namely transitivity and
contrapositivity A new transformation for converting do f
uncertain implication rules into BBA functions
is
presented
and it is proved that, in contrast, this transformation satis
fies transitivity and contrapositivity. The fulfilment
of
these
properties guarantees that the transformation is coherent, in
the sense that the logical axioms continue to hold also in
the BBA function domain and, thus, that the transformation
does not alter the information. Maintaining coherence
of
information is a fundamental requirement in any data fusion
process. Notice that, since the Dezert-Smarandache theory
includes the Dempster-Shafer theory as a particular case and
it reduces to the Dempster-Shafer theory when the exclusivity
of all elements in the frame
is
assumed [7], the transformation
to convert uncertain implication rules into BBA functions can
also be used in the Dezert-Smarandache theory framework.
II . BACKGROUND ON EVIDENCE THEORY
Let denote the set of possible values the frame of a
variable x When modelling real world problems we often deal
with many interrelated variables and the resulting joint frame
is multi-dimensional. All the variables considered throughout
the paper have finite frames. Let D denote a set of variables.
The Cartesian product en ~ x { :XED} is the frame
of
D.
The elements
of en
are called the configurations of
D.
The beliefs [8] about the true value of D are expressed on
the subsets
of en
The basic belief assignment BBA)
m
D
on
domain D is a multivariate belief function which assigns to

8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 2/7
where
a
is the normalisation constant.
3)
Marginalization is a proj e ctio n of a BBA defined on D
into a BB A d ef in ed
on
a coars er d om ai n
D D:
where A 8D
l
and B
8D
2
• T he rul e A = } B means that
every expression that satisfies A also satisfies B
In
words, B
is tr ue f or any e xp re ss io n t ha t satisfies
A,
i .e. the following
truth table holds
6)
A B
A B
A=}B
B=>A
1
1
0 0
1
1
1
0 0
1 0
0
0
1 1
0
1 1
0 0
1 1
1
1
A
1do implication rule
A 1do implication rule can be expressed as a BBA function
consisting
of 2
focal sets o n the joint domain
D
1
U D
2
[3],
[9]:
mDlUD2 C = { x
~ f C : x B U Ax
8D2
1 -
Q
If C - 8 D l U D 2
7)
where 11 is t he c om pl em en t
of
A in 8 D
l
Th e
BB A
in 7)
can be derived in a straightforward way fro m t he t ab le of truth
5).
In
fact, by definition,
A = } B
is t ru e w hen:
1
A and B
are
both
true;
2 A is false
and
B is t ru e or false.
IV . IMPLICATION RULES IN EVIDENCE THEORY
E vi dence t heory can m an ag e u ncertain i mp li cati on rul es in
a d ir ec t way, i.e. t he re is a o ne -t o- on e m ap pi ng b et we en u n
certain implication rules and BBA functions. Transformations
for converting
I
do f
an d
2dof
uncertain implication rules into
the evidence th eo ry fra mework have b ee n p res ente d in [3]
and, respectively,
[1], [6].
In the following sections, these
transfomations will
be
discussed in detail.
It
will
be
shown
th at the tra nsf orma tion pr ese nte d in [3] is c onsisten t w ith
t he axi om s
of
logical implication, i.e.
reflexivity transitivity
an d contrapositivity However, transitivity an d contrapositivity
properties are not satisfied by the transformation discussed in
[1],
[6] for 2dof uncertain implication rules. A
ne w
transfor
mation for modelling
2dof
uncertain implication rules within
evidence theory will be presented
and
it will
be
s ho wn t hat i t
satisfies all the axioms of logical implication.
It
is impor tan t tha t these axioms b e satisfied for the fol
lowing reasons. The fulfillment of these properties guarantees
that the transformation is coherent, in the sense that the logical
axi om s con ti nu e t o h ol d also i n t he
BB A
function domain.
Th e
transitivity property guarantees that the following procedures
are equivalent:
• e xploit the semantics
of
propositional logic to infer that
A => B a n d B
:::}
C imply A :::} C and , t hu s, con vert
A =>
C
i nt o a B BA fun ct io n;
• conve rt both A
= }
B a n d B
=>
C i nt o B BA fun ct io ns
and t hen exp lo it D em ps ter s rul e of combination to infer
t hat t he t wo t rans fo rm ed B BA fun ct io ns i mp ly A
=>
C
An
uncertain implication rule is an implication rule
4) which
is tr ue in a c er ta in p er ce nt ag e of cas es , i.e. w it h a p ro babi li ty
confidence)
P E [0,1],
with
0 ::; a ::;
1 for Idof uncertain
implication rules or
p
E [0, /3] with 0 ::; a
3
:::; 1 for 2dof
uncertain implication rules.
will b e re fe rr ed to as contrapositivity
5)
4)
2)
A = } B
A B
A=>B
1 1
1
1
0
0
0
1
1
0 0
1
m
D1D
A)
=
L
mD B)
B:BtD =A
Combination
of t wo B BA s rn?l an d r n ~ is c ar ri ed o ut
using the
Dempster s
rule of combination [8]. However, before
applying the Dempster s rul e, t he v acuo us ext en si on of both
mpl and to the joint domain D = D
1
U
D
2
is needed.
The result will be a B B A mR d efin ed o n d on lain
D,
as
follows:
[mpl mr
2
] A)
mR
o L
m?l B
nr
2
C
B,C:BiDnciD=A
The logical implication has two important properties:
• reflexi vi ty :
A = } A
is always true tautology);
•
transitivity: if
A
= }
B a n d B
= } C
then A => C.
F ro m t he b el ow t ab le
of
truth 6), it c an be seen that A
= }
B
is l og ical ly equ iv al en t to B
A
In the sequel, this property
III. IMPLICATION RULE
S up po se t here are t wo d is jo in t d om ai ns ,
D
1
and
D
2
,
with
associated frames
8
D l
an d
8
D2
respectively. Formally, an
implication rule is
an
expression
of
t he form
every subset A of 8
D
a value in [0,1], i.e. rn
D
:
2 f D
[ 0,1]. T he following co nditio n is a ssu me d to b e satisfied:
I : A ~ f D mD A) =
1 Th e
subsets A s uch t hat mD A)
>
0
are referred to as t he focal element s of th e BB A. T he sta te of
complete ignorance about the set of variables D is represented
by a
vacuous
B BA d ef ine d as mD A)
=
1
if A
=
8
D
an d
zero otherwise.
Three basic operations
on
multivariate belief functions are
of interest here: vacuous extension marginalization and com-
bination
[ ]
Vacuous
extension of
a BBA defined o n do mai n
D
to a
larger domain D 2 D is d efin ed as [8]
mD jD B) = {
m
D
A) if B = . A D j D
1)
o otherwIse.

8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 3/7
Therefore, the mass
a
is assigned to the elements of the
joint
frame eD
UD
2
which correspond to the previous listed cases,
i.e
A
x
B A
and
B
are both true) and, respectively,
A
x eD
2
A
false and B does
not
matter). The rest
of
the mass,
1 -
Q
is given to the universe set.
Example 1: - Let D
I
= {x} D
2
= {y}, ex =
{:Z:l, X2, X3},
e
y
= {YI,
Y2,
Y3}, A = {Xl,
X2}
and B = {Y2}.
Then the BBA representat ion of the rule
A = B
with
confidence
p E
[Q,
1]
is given by:
m{x,y} { Xl Y2 , X2 Y2 ,
X3
YI , X3 Y2 , X3 Y3 } = Q
m,{x,y} { Xl, YI , Xl, Y2 ,
Xl,
Y3 , X2, YI , X2, Y2 ,
X2,Y3 , X3,YI), X3,Y2 , X3,Y3)}) = 1 -
a.
8)
•
t
can be proved that 7) satisfies the reflexivity, transitivity
and contrapositivity properties of implication rules. A
proof
will be given later in the section. Here only the reflexivity
property is discussed. Rule A
=
A is a tautology, that is
a proposition which is always true and so does not carry
any addi tional in format ion. The correct way to represent
this statement in the evidence theory framework should be a
vacuous belief function.
Theorem
1: - The rule
7
satisfies the reflexivity property.
Proof -
Considering
D
I
=
D
2
and applying
7)
to
A = A,
one gets
m
D
UD
2 C) = { Q ifC =
A x A
U
11 x
e
D2
)
1 -
Q if C =
e
D
x
eD
2
9)
Being
D
2
=
D
I
,
i t results that eD
2
= e
D
= A U
11
and
thus
A
x
A U i1
x 8D
2
)
=
A x A
U
11 x
A U
11 x
11
Marginalizing the BBA 9) defined in the domain D
I
U
D
2
to
the domain
D
I
or equivalently to the domain
D
2
one gets
m
D1
C =rn
D2
C
= { 1,
if
C
=.E>
D
1=E>
D
2 10)
0, otherwise
which is a vacuous
belief
function
on
the frame 8
D1
=
E>D
2
•
Therefore, the reflexivity property is satisfied
B.
2dof
implication rule
The transformation of an impl ication rule into aBBA
is more complicated for 2dof uncertain implication rules.
In [6], a t ransformation to represent this kind
of
uncertain
implication rules within the evidence theory framework has
been presented. This representation is defined in the following
way:
{
Q i fC= AxB U 11x8
D2
)
mDIUD2 C) =
1 - fl,
if C =
A
x
B u if
x 8D2
{3
-
Q if C = e
D1U
D
2
11)
where 11 is the complement
of
A in eD , and accordingly B
is the complement of B in 8D
2
. Note that the mass 1 -
{3
has been assigned to
A
x
B U A
x 8
D2
).
Example
2: - Consider again example
1.
In the case
p E
[Q, 3], applying 11), the following BBA can be obtained:
m{x,y}
{ Xl Y2 , X2 Y2 , X3 YI , X3 Y2 ,
X3 Y3 } =
Q
m{x,y}
{
Xl
YI ,
Xl,
Y3 , X2 YI , X2,
Y3 ,
X3 YI ,
X3
Y2 ,
X3
Y3 }
=
1 -
{3
m{x,y}
{ Xl, YI , Xl, Y2 , Xl, Y3 , X2, YI , X2, Y2 ,
X2,Y3 , X3,YI), X3,Y2 , X3,Y3 } = {3-a.
12)
•
owever, as it will be proved in the sequel [10], this trans-
formation does not satisfy transit ivity and contraposit ivity
properties . In this paper, a new transformat ion, referred to
hereafter as new rule, is introduced and it will be proved that
it fulfills transitivity and contrapositivity 1. The
new rule
[10]
is defined as follows:
if
C
=
A
x
B U i f
x
8
D2
)
if C = i f
x
B
U
A
x
e
D2
)
if C = 8D1UD2
13)
In this case, the mass
1 -
{3 has been assigned to
C
=
11 x
B U
A x
8
D2
) instead of
A
x
B U
if x
8
D2
) as indicated
in 11).
Example
3: - Consider again example
1.
Applying 13), the
following BBA is obtained:
m{x,y} { Xl Y2 ,
X2
Y2 , X3
YI ,
X3 Y2 ,
X3
Y3 }
= Q
m{x,y} { Xl
YI ,
Xl,
Y2 , Xl Y3 ,
X2,
YI ,
X2
Y2 ,
X2 Y3 , X3 YI , X3 Y3 }
= 1 -
{3
m{x,y} { XI,YI),
XI,Y2), XI,Y3), X2,YI), X2,Y2 ,
X2,Y3), X3,YI), X3,Y2), X3,Y3)})
=
3-
Q.
14)
•
ote that the rule 11) and the
new rule
differ only in the
second focal set , i.e. the element with mass
1 -
3.
Theorem 2: - The new rule 13) satisfies the contraposi
tivity property, while rule 11) does not.
Proof - The contrapositivity property is satisfied if the two
BBA functions o t i n ~ d by
~ n s o r m i n g
the implications A =
B and, respectively, B = A are equal. The BBAs relative to
the implication A = B obtained
by
applying the ru le 11)
and the
n ew rule
are given in
11)
and, respectively,
13}.
Conversely, applying the two rules to the implication B = A,
one gets the BBAs defined below:
focal sets
mass rule 11)
new rule
n
B
x
A U B
x
SO l
B x A U B x SO l
1-{3
13 x
A U
B x
8 0 1
B x
A
U B x 8
01
)
{3-n
8
02UO
S02
UO
1The reflexivity property is also trivially satisfied

8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 4/7
A x
C
U
A
x 8D
3
)
A
x C U A
X
8
D3
)
22)
E =
A x
C
U
A
x 8D
3
)
E = A
x
C
U A
X
8D
3
)
E =
8 D I U D 3
A x C
U
A x C
U if
x C
A
x C
U
A x C
U
A x C
W he n the knowledge o n A =} C is only derived by the
knowledge on
=}
B a n d =} C, these conditions are
always satisfied. In fact, in this case, the probability interval
[0:3,
,83]
for
=} C is chosen only according to the probability
intervals
[a1 ,81]
and
[0:2, ,82]
Since the probability that
A
=}
B a n d C are both true is 0:10:2 and the probability
that they are both false is 1 - {31) 1 - {32), it follows that
0:3
=
0:10:2 and 1 -
,83 = 1
- 31) 1 -
,82)
Thus, 23) is
always satisf ied in this case. Conversely, it can be proved in
a s im ilar w ay that the r ule 11) does not s atis fy the condition
22). I n fact, in this case, from 11) it turns out that:
21)
Exploiting the fact that 8
DI
=
A
U
A
and 8D
3
= C u
C, the result of the combination of the above BBAs on the
frame
8 DIUD2 UD3
is given i n table I Finally, by applying
the marginalization operator defined in 2), the BBA m 1 mJ2
can be marginalized to the frame 8 D I U D 3 ; the resulting BBA
is shown in table II . Note that rn1
m 2 ) l D
I
UD
3
has t he
same focal sets
of
m 3
in 19), i.e.
a 1
E A x x 8
D3
)
U
A x 8
D2
x 8D
3
)
r n p I
UD
2
UD
3 E ) =
1
- 81
E A x x 8
D3
)
u
A x 8D2 x 8
D3
)
31 - a1
E
8D
I
UD
2
UD
3
20)
a 2
E
e
DI
x
B
x
C
U
e
DI
x B x 8
D3
)
rnrIUD2UD3 E)
=
1 - {32
E
e
DI
x
B
x
C
U 8
DI
X B x 8
D3
)
,82 - 0:2
E
8D
I
UD
2
UD
3
19)
The BBAs mDIUD2 and
mD2UD3
c an b e c omb in ed by ap-
p ly ing D emp st er s c ombi nat ion rule 3). Since t he c ombi
nation of belie f functions can only be carried out on the
same frame, before applying Dempste r s rule, the BBAs
mDIUD2
and
mD2UD3
must be extended to the common
frame 8DIUD2UD3 Applying the vacuous extension operator
defined in 1), one gets
18)
E
=
A x B U A x 8
D2
)
E = if x B U A x 8
D2
)
E
=
8
DI U
D
2
17)
E = B x C U
B
x 8
E = B x C
U
B x 8
D3
)
E = 8
D2U
D
3
In this case, by reversing variable order, one has
A x B
U
A X
2
)
which coincides with the second focal
set in 13). Finally,
by
reversing the var iables order , it can
b e see n tha t also t he t hi rd focal set
8D
2
uD
I
is equivalent to
e
DI
U
D
2 and, thus, contr apos itivity is satisfied by the new
•
It can be seen that, si nc e the first and thi rd focal sets
of
the
new rule 13) coincide with the focal sets of the rule 7),
also the trans formation f or the 1
do f
implication rule satisfies
contrapositivity.
By r ever sing the order
of
the variables, one gets:
8D
2
x A
U
B x A
---t
A x B
U A
x
2
)
which is equal to t he first focal set of the BBAs in 11) and,
respectively, 13). Contrapositivity is thus satisfied for the first
focal set of both r ules. Considering the s econd focal set and
the rule 11), one gets:
B x A U B X 8
DI
)
=
B x
A
U B x fi U B x
A
15)
Reversing the o rd er
o f
the variables , one gets
A
x
B U
A x B
U
A x B w hich is dif ferent f rom the s econd focal
element in 11), i.e. A x B U
A
x B U
A
x B . The rule
11) does not satisfy the contrapositivity property. Conversely,
if
the
new rule
is considered, one gets
B x A U B x 8D
I
=
B x A U B x A U B x A
= B x Ji
U 8
D2
X A .
Theorem
3: - The
new rule
satisfies the transitivity
pr oper ty, w hile rule 11) does not.
roo - T he t ra nsit ivit y pr op er ty mea ns t hat
=} B a n d
=} C implies
=}
C where 8
DI
, 8
D2
and C
8D3 In terms o f BBA functions, we state that the transitivity
property is satisfied if
mp1UD
2
mr2UD3)1{DIUD3} = m p I U D
3
16)
where:
m p I U D
2
is the BBA obtained f rom
A
with p
E
[al
,81]; m Jr
2UD3
is the BBA obtained from
=}
C with
p
E
[a2 ,82];
r n ? I U D
3
is the BBA obtained from
=}
C
with P E [a3, ,83] T he objective is to prove that new rule
satisfies the transitivity property. From 13), it turns out that:
C ons id er t he first focal set B x
A
U B X 8
DI
); since
8D
I
= A U
A
and 8D
2
= BUB, it follows that
B x A U B x 8D
I
B x A U B x A U B x
=
8
D2
x
A U B
x
A .
8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 5/7
TABLE I
RESULT OF THE COMBINATION
OF
THE
BBAs
m l AND m2 ON THE FRAME
8D
1
UD
2
UD
3
-
BASED
ON
RULE
13)
1
-
,8d l
-
,82
Xl
1
-
,82
A x B x C U :4 x B x C U if x x C u if x x C
A x B x C U A x B x C U A x x
C
U X x x
C
A
x
B
x
C
U
A
x
B
x
C
U
II
x
B
x
C
U
A
x
B
x
C
u A x B x
A
x
B
x
C
U
A
x
B
x
C
U
A
x x U
A
x x
C
u A x B x
A
x
B
x
C
U
A
x x
C
U
A
x x
C
U
if
x
B
x
C
U A x x C U A x B x
A
x
B
x
C
U
A
x
B
x C U
A
x
B
x
C
U
A
x
B
x C
u :4 x x C U A x x C
A x B x C U A x B x C U A x x C U A x x
C
u if x x C U if x x C
A x B x C U A x B x C U A x x C U A x B x C
u il
x
B
x
C
U
A
x x C
8
1U
D2
UD
3
TABLE
II
RESULT OF THE MARGINALIZATION OF m l
m2 TO 801U03
-
BASED
ON
RULE 13)
A
x
C U A
x
C U
X x
C
A
x
C
U A x U A x C
8DIUD3
26)
Again, by applying the Dempste r s combination rule 3),
the BBAs mDlUD2 and mD2UD3 can be combined on the
extended domain
D
1
U D
2
U D
3
, i.e.
E = B x
C
U B x
8
D3
)
E = B x C U B x 8D3
E
= 8D2UD3
25)
E
=
A
x C U
II
X 8
D3
)
E
= A x C
U i f X 8D3
E
= 8D
1
U
D
3
Fig. 1 Transfonnation 13) preserves logical axioms
:
E
A x B x 8D
3
)
u
A x SD
2
x
8
D3
)
mpl
UD
2
UD
3 E
=
1 -
f
E A x B x eD
3
)
U
i f x
E>D
2
x
E>
D
3
f3
-
:
E
8D
l UD
2U
D 3
27)
°2
E
Dl
X B x C
U
e
Dl
x B x e
D3
)
m ~ l U D 2 U D 3 E =
1 - f
E
e
Dl
x
B
x C
U e
Dl
x
B
x 8
D3
)
f -
:2
E
8DlUD2UD3
28)
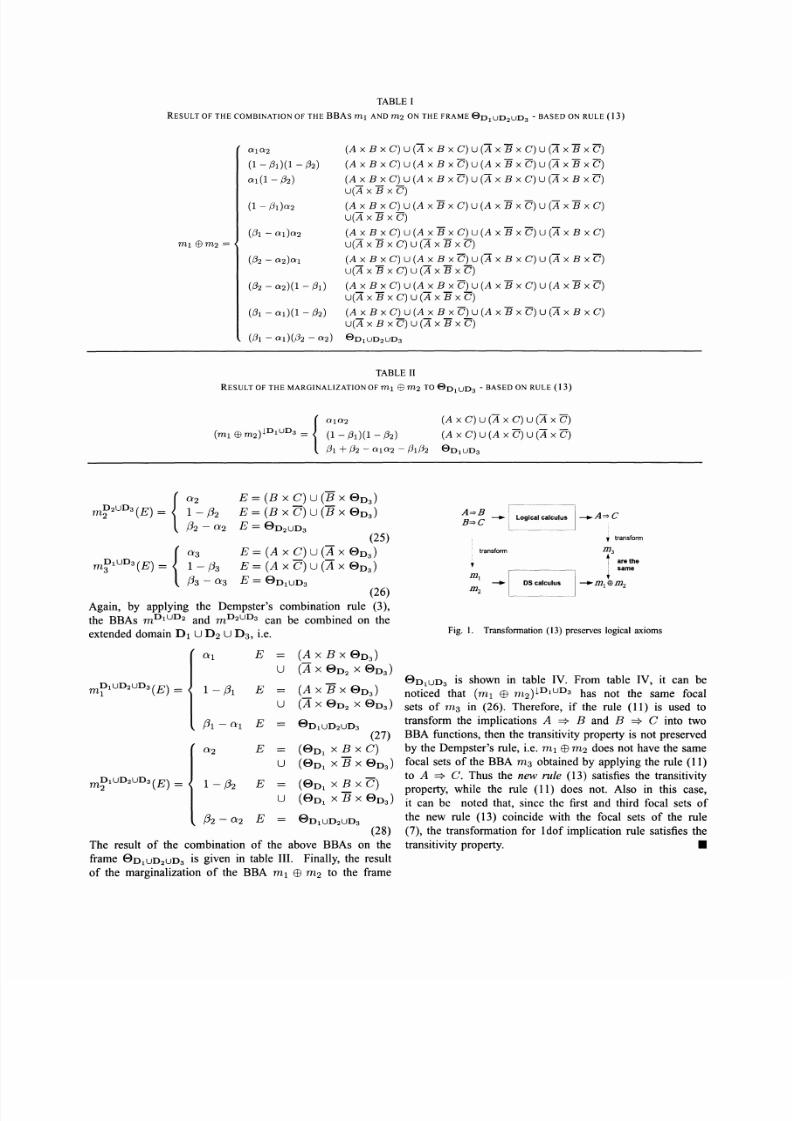
The r esult
of
the combination of the above BBAs on the
frame eD
l
UD
2
UD
3
is given in table III.
Finally, the result
of
the marginalization
of
the BBA m1
m2
to the frame
8
DlU
D
3
is shown in table IV. From table IV, it can be
noticed that
m 1
n12 lDlUD3 has not the same focal
sets of
rn3
in 26). Therefore, if the rule 11) is used to
transform the implications A =? Band B =? C into two
BBA functions, then the transitivity property
is
not preserved
by the Dempster s rule, i.e.
m1
m2 do es n ot have the same
focal sets of the BBA m3 obtained by applying the r ule 11)
to A =?
C.
Thus the new ntle 13) satisfies the transitivity
property, while the rule 11) does not. Also in this case,
it can be noted that, since the first and third focal sets of
the new rule 13) coincide with the focal sets of the rule
7), the trans form ation for 1dof implication rule satisfies the
transitivity property. •
8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 6/7
TABLE
III
RESULT
OF
THE
COMBINATION OF
THE BBAs m1
AND
m2 ON
THE
FRAME eD lUD UD -
BASED ON RULE
(11)
1 - 131 1 - 132
Q1
1 -
{32)
1 -
{31 Q2
A
x
B
x C)
U
Ax
B
x
C U A
x B x
C U
Ax B x C
A xB x
C U A
xB x C)
U
:4 x
B
x
C)
U
A x B x
C
U A
x
B
x C
A x B x C
U 11
x B x C
U
11 x B x
C U 11
x
13
x C
A x B x
C U
A x
Ii
x C)
U
u A x B x
C U
11 x B x C)
U 11
x
B
x
C)
A
x
B
x
C U
A x
B
x
C U A
x
B
x
C U :4
x
B
x
C
u A xB x C) U
11
xB x
C
A
x
B
x C U
A
x
B
x
C)
U
:4
x
B
x C U A x
B
x
C)
U A
x B x C U A x B x
C
A xB x
C
U A xB x C) U 11 x B x
C
U A x B x C)
U A
x
B
x
C U A
x
B
xC
A x
B
x C)
U
A x
B
x C)
U
A x
Ii
x
C U
A x B x C)
U A
x
B
x
C U A
x
B
x
C
TABLE IV
RESULT OF THE MARGINALIZATION OF
m1
m2 TO l UD 3 -
BASED
ON RULE (11)
Summarizing, when transformation (13) is exploited to
transform uncertain implication rules, logical and evidence
calculus can equivalently be used to combine pieces
of
in
formation. Figure 1 provides a pictorial representation of the
equivalence between logical and evidence theory calculus.
C. A practical application
In this section, a simple example will be used to illustrate
the application of (13) to a problem of decision-making under
uncertainty. An officer from a civil protection agency must
predict the chance of a flood occurring in the next few
hours in a given area. He knows that it will be cloudy with a
confidence of 0.7 and that:
1
if it is cloudy then it will rain strongly with a confidence
between 0.6 and 0.8;
2) if it rains strongly then it will flood with a confidence
between 0.5 and 0.9.
This problem is defined in the frame 8
v
=
{ r c, ) , r c ),
r,
c,
f ,
r, c,
f ,
r
c,
f ,
r
c,
1 ,
r,
c,
1 ,
r, c,
f }
where:
r
= rain, r = noRain, c = cloudy, c = noCloudy, =
flood
and
1= noFlood.
He can model this knowledge with
three BBA functions. The statement cloudy with a confidence
of 0.7 can be expressed by:
ml c =
0.7, ml c,c
=
0.3
The rest of the knowledge is represented by:
cloudy = }
r in
with a confidence between 0.6 and 0.8
rain
= }
flood
l1· ith
a confidence between
0.5
and 0.9
(29)
Using the formula given in (13), these rules can be converted
into the following BBA functions.
m2 r,c , r,c , r,c
0.6
m2 r,c , r,c , r,c
0.2
m2 r, c , r,c , r,c , r,c
0.2
m3 r, f , r, f , r,
1
0.5
m3 r, f , r
1 ,
r,
1
0.1
m3 r,
f ,
r, f ,
r 1 ,
r,
1 0.4
Before combiningthe previousBBAs via Dempster s rule, they
must be extended to the common frame
v
.
The result of
the combination of the two BBAs is reported in table V. The
resulting BBA
m2
E m3 is then combined with and the
result is shown in table VI. Finally, marginalizing the BBA in
table VI to the frame 8
f
=
{ , } of
the variable
of
interest
flood , one gets
m f) =
0.21, m , 1
=
0.79 (30)
The BBA (30) can equivalently be obtained by exploiting the
transitive property, the equivalence between logical calculus
and Dempster s combination rule. In fact, by applying the
transitive property to the two implications in (29), one gets
clottdy
= } .f
lood ~ i t a confidence e t ~ e e n
0.3
and 0.98
which can be transformed into the following BBA
m4 c,
f , c, f , c, 1 0.3
m4 c, f , c, 1 , c, f 0.02
m4 c,
f , c, f ,
c
1 , c, 1 0.68

8/20/2019 Modelling Uncertain Implication Rules Theory
http://slidepdf.com/reader/full/modelling-uncertain-implication-rules-theory 7/7
TABLE V
RESULT
OF THE COMBINATION OFm
m
mass
focal
mass
focal
0.3
(r,
c, f
(r,
f
1 ,
c
)(1 , c, )
0.24
(r,
c, f
(r,
f
1 ,
c f
(r,
c, f
(r,
c f 1 ,
c, )
0.02
(r, c,
f
(r, c,
f
1 , c, )(1 , c, )
0.08
(r, c,
f
1 ,
c f
1 , c
f
(r, c,
f
1 , c,
f
1 , c, )
0.06
(r, c, f (r, f (r, c, f (r, f 1 , c, )
0.1
(r, c, f 1 , c, f 1 , c f (r, f 1 , c f 1 , c, )
0.1
(r,c, ),(1 ,c, ),(1 ,c, ),(1 ,c, ),(1 ,c, )
0.02
(r, c f (r, c f 1 , c, f (r, f (r,
f 1 ,
c, )
0.08
v
TABLE VI
RESULT
OF THE COMBINATIONOF
m2
8
m3)
mass focal
mass focal
0.21
(r, c, )
0.018
(r, c, f (r,
f (r, c, f (r,
f 1 ,
c, )
0.21
(r, c, f (r, c, )
0.03
(r,
c f
1 ,
c, f
1 ,
c f
1 ,
c f
1 , c, )
0.028
(r,
c, f
(r,
c, f
1 , c, )
0.072
(r, c,
f
(r,
f
1 ,
f
(r, c,
f
(r, c
f
1 , c, )
0.14
(r,c, ),(1 ,c, ), (1 ,c, )
0.024
(r, c, f 1 , c, f 1 , f (r, c, f
1 ,
c, f 1 , c, )
0.112
(r,
c,
f
1 , c,
f
(r,
c,
f
1 ,
c, )
0.03
(r,
c,
f
1 , c,
f
1 , c,
f
(r, c
f
1 ,
c
f
1 ,
c, )
0.09
(r,
c f
(r,
f
1 ,
c
)(1 , c, )
0.006
(r,
c, f
(r,
c, f (r, c, f
(r,
f
(r,
c f
1 , c, )
0.006
(r, c, f (r, c, f
1 ,
c, )(1 , c, )
0.024
v
The result of the combination of rn l and rn4 on the frame E v
is given by
(31)
Marginalizing the BBA in (31) to
E
the BBA (30) is
obtained again. This is jus t a very simple example; these
techniques can, however, be applied to much more complex
decision-making probleills [1]. The major difficulty in this
kind
of applications is to quantify the knowledge, from human
experts and other sources
of
information, in precise numerical
values. Since humans usually represent the knowledge in terms
of uncertain implication rules, the transformation (13) can
become very useful.
V
CONCLUSIONS
In this paper, a transformation for converting 2dofuncertain
implication rules within the evidence theory framework has
been presented. Further, it has been proven that this transfor
mation
is
coherent, in the sense that the logical axioms con
tinue to hold in the BBA function domain as well. Therefore,
this transformation rule guarantees that the fused information
obtained either by combining single pieces of information
expressed in terms of uncertain implication rules by applying
the semantics
of
propositional logic or by transforming these
pieces of information using the equivalent BBA functions and
[1] A Benavoli,
B
Ristic, A Farina,
M
Oxenham, and L Chisci, An
approach to threat assessment based on evidential networks,
in
Int.
Con Fusion 2007, Quebec City, 2007.
[2]
M
Valtorta, J Byrnes, and
M
Huhns, Logical and probabilistic
reasoning to support information analysis in uncertain domains, inProc,
of
the third workshop
on
Combining Probability and Logic, Canterbury,
England, 2007.
[3]
B
Ristic and P Smets, Target identification using belief functions and
implication rules,
in IEEE Trans.
on
Aerospace and Electronic Systems,
vol. 41, no. 3 July 2005, pp. 1097-1103.
[4]
Target classif ication approach based on the belief function
theory, in
IEEE Trans.
on
Aerospace and Electronic Systems,
vol. 41,
no. 2 April 2005, pp. 574-583.
[5]
D
Lewis, Probabilities of Conditionals and Conditional Probabilities,
1976, vol. 85, pp. 297-315.
[6] R G Almond, Graphical Belie fModeling. Chapman and Hall, 1995.
[7]
F
Smarandache and J Dezert,
Applications and Advances
of
DSmTfor
Information Fusion vol. I. American Research Press, Rehoboth, 2004.
[8]
G
Shafer,
A mathematical theory
of
evidence.
Princeton University
Press, 1976.
[9] P Smets, Belief functions: the disjunctive rule
of
combination and
the generalized Bayesian theorem, in Int. Journal of Approximate
Reasoning,
vol. 9, 1993, pp. 1-35.
[10] A Benavoli,
Modelling and efficient fusion
of
uncertain
information: beyond the classical probability approach,
PhD thesis, University
of
Firenze, Firenze, Italy,
Web:
http://benavoli.googlepages.com/publications, 2007.
then combining them by means of evidence theory calculus,
will produce identical results.
REFERENCES
1 ,
c,
f),
(r,
c ]
r,c, ), r,c, ), r,c, ), r,c,])
r
c
f r c f (r, c f (r, c f
r
f
(r, c, )
r
c,
f
(r,
c,
f
r
f
r
c,
f
(r, c, f (r, c ]
E v
.204
0.006
0.21
0.49
0.09








![Basel 3 & Implication[1]](https://static.fdocuments.us/doc/165x107/577d1e721a28ab4e1e8e9042/basel-3-implication1.jpg)








