MIT Electric Machines
337
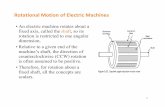
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.685 Electric Machines Class Notes 1: Electromagnetic Forces September 5, 2005 c 2003 James L. Kirtley Jr. 1 Introduction Stator Stator Conductors Rotor Rotor Conductors Bearings Shaft End Windings Air Gap Figure 1: Form of Electric Machine This section of notes discusses some of the fundamental processes involved in electric machinery. In the section on energy conversion processes we examine the two major ways of estimating elec- tromagnetic forces: those involving thermodynamic arguments (conservation of energy) and field methods (Maxwell’s Stress Tensor). But first it is appropriate to introduce the topic by describing a notional rotating electric machine. Electric machinery comes in many different types and a strikingly broad range of sizes, from those little machines that cause cell ’phones and pagers to vibrate (yes, those are rotating electric machines) to turbine generators with ratings upwards of a Gigawatt. Most of the machines with which we are familiar are rotating, but linear electric motors are widely used, from shuttle drives in weaving machines to equipment handling and amusement park rides. Currently under development are large linear induction machines to be used to launch aircraft. It is our purpose in this subject to develop an analytical basis for understanding how all of these different machines work. We start, however, with a picture of perhaps the most common of electric machines. Electric Machine Description: Figure 1 is a cartoon drawing of a conventional induction motor. This is a very common type of electric machine and will serve as a reference point. Most other electric machines operate in 1 2
Transcript of MIT Electric Machines

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 1: Electromagnetic Forces September 5, 2005 c©2003 James L. Kirtley Jr.
1 Introduction
Stator
Stator Conductors
Rotor
Rotor Conductors
Bearings
Shaft End Windings
Air Gap
Figure 1: Form of Electric Machine
This section of notes discusses some of the fundamental processes involved in electric machinery. In the section on energy conversion processes we examine the two major ways of estimating electromagnetic forces: those involving thermodynamic arguments (conservation of energy) and field methods (Maxwell’s Stress Tensor). But first it is appropriate to introduce the topic by describing a notional rotating electric machine.
Electric machinery comes in many different types and a strikingly broad range of sizes, from those little machines that cause cell ’phones and pagers to vibrate (yes, those are rotating electric machines) to turbine generators with ratings upwards of a Gigawatt. Most of the machines with which we are familiar are rotating, but linear electric motors are widely used, from shuttle drives in weaving machines to equipment handling and amusement park rides. Currently under development are large linear induction machines to be used to launch aircraft. It is our purpose in this subject to develop an analytical basis for understanding how all of these different machines work. We start, however, with a picture of perhaps the most common of electric machines.
Electric Machine Description:
Figure 1 is a cartoon drawing of a conventional induction motor. This is a very common type of electric machine and will serve as a reference point. Most other electric machines operate in
1
2

a fashion which is the same as the induction machine or which differ in ways which are easy to reference to the induction machine.
Most (but not all!) machines we will be studying have essentially this morphology. The rotor of the machine is mounted on a shaft which is supported on some sort of bearing(s). Usually, but not always, the rotor is inside. I have drawn a rotor which is round, but this does not need to be the case. I have also indicated rotor conductors, but sometimes the rotor has permanent magnets either fastened to it or inside, and sometimes (as in Variable Reluctance Machines) it is just an oddly shaped piece of steel. The stator is, in this drawing, on the outside and has windings. With most of the machines we will be dealing with, the stator winding is the armature, or electrical power input element. (In DC and Universal motors this is reversed, with the armature contained on the rotor: we will deal with these later).
In most electrical machines the rotor and the stator are made of highly magnetically permeable materials: steel or magnetic iron. In many common machines such as induction motors the rotor and stator are both made up of thin sheets of silicon steel. Punched into those sheets are slots which contain the rotor and stator conductors.
Figure 2 is a picture of part of an induction machine distorted so that the air-gap is straightened out (as if the machine had infinite radius). This is actually a convenient way of drawing the machine and, we will find, leads to useful methods of analysis.
Air Gap
Stator Core
Stator Conductors In Slots
Rotor Conductors In Slots
Figure 2: Windings in Slots
What is important to note for now is that the machine has an air gap g which is relatively small (that is, the gap dimension is much less than the machine radius r). The air-gap also has a physical length l. The electric machine works by producing a shear stress in the air-gap (with of course side effects such as production of “back voltage”). It is possible to define the average air-gap shear stress, which we will refer to as τ . Total developed torque is force over the surface area times moment (which is rotor radius):
T = 2πr 2ℓ < τ >
Power transferred by this device is just torque times speed, which is the same as force times
2

3
surface velocity, since surface velocity is u = rΩ:
Pm = ΩT = 2πrℓ < τ > u
If we note that active rotor volume is , the ratio of torque to volume is just:
T = 2 < τ >
Vr
Now, determining what can be done in a volume of machine involves two things. First, it is clear that the volume we have calculated here is not the whole machine volume, since it does not include the stator. The actual estimate of total machine volume from the rotor volume is actually quite complex and detailed and we will leave that one for later. Second, we need to estimate the value of the useful average shear stress. Suppose both the radial flux density Br and the stator surface current density Kz are sinusoidal flux waves of the form:
Br = √
2B0 cos (pθ − ωt)
Kz = √
2K0 cos (pθ − ωt)
Note that this assumes these two quantities are exactly in phase, or oriented to ideally produce torque, so we are going to get an “optimistic” bound here. Then the average value of surface traction is:
1 2π
< τ >= BrKzdθ = B0K02π 0
The magnetic flux density that can be developed is limited by the characteristics of the magnetic materials (iron) used. Current densities are a function of technology and are typically limited by how much effort can be put into cooling and the temperature limits of insulating materials. In practice, the range of shear stress encountered in electric machinery technology is not terribly broad: ranging from a few kPa in smaller machines to about 100 kPa in very large, well cooled machines.
It is usually said that electric machines are torque producing devices, meaning tht they are defined by this shear stress mechanism and by physical dimensions. Since power is torque times rotational speed, high power density machines necessarily will have high shaft speeds. Of course there are limits on rotational speed as well, arising from centrifugal forces which limit tip velocity.
Our first step in understanding how electric machinery works is to understand the mechanisms which produce forces of electromagnetic origin.
Energy Conversion Process:
In a motor the energy conversion process can be thought of in simple terms. In “steady state”, electric power input to the machine is just the sum of electric power inputs to the different phase terminals:
Pe = viii i
Mechanical power is torque times speed:
Pm = TΩ
3

Mechanical
Electro-
Converter Mechanical Power OutElectric Power In
Losses: Heat, Noise, Windage,...
Figure 3: Energy Conversion Process
And the sum of the losses is the difference:
Pd = Pe − Pm
It will sometimes be convenient to employ the fact that, in most machines, dissipation is small enough to approximate mechanical power with electrical power. In fact, there are many situations in which the loss mechanism is known well enough that it can be idealized away. The “thermodynamic” arguments for force density take advantage of this and employ a “conservative” or lossless energy conversion system.
3.1 Energy Approach to Electromagnetic Forces:
Magnetic Field
System
+ v -
f
x
Figure 4: Conservative Magnetic Field System
To start, consider some electromechanical system which has two sets of “terminals”, electrical and mechanical, as shown in Figure 4. If the system stores energy in magnetic fields, the energy stored depends on the state of the system, defined by (in this case) two of the identifiable variables: flux (λ), current (i) and mechanical position (x). In fact, with only a little reflection, you should be able to convince yourself that this state is a single-valued function of two variables and that the energy stored is independent of how the system was brought to this state.
Now, all electromechanical converters have loss mechanisms and so are not themselves conservative. However, the magnetic field system that produces force is, in principle, conservative in the
4

sense that its state and stored energy can be described by only two variables. The “history” of the system is not important.
It is possible to chose the variables in such a way that electrical power into this conservative system is:
dλ P e = vi = i
dt
Similarly, mechanical power out of the system is:
dx Pm = f e
dt
The difference between these two is the rate of change of energy stored in the system:
dWm = P e − Pm
dt
It is then possible to compute the change in energy required to take the system from one state to another by:
a
Wm(a) − Wm(b) = idλ − f edx b
where the two states of the system are described by a = (λa, xa) and b = (λb, xb) If the energy stored in the system is described by two state variables, λ and x, the total
differential of stored energy is: ∂Wm ∂Wm
dWm = dλ + dx ∂λ ∂x
and it is also: dWm = idλ − f edx
So that we can make a direct equivalence between the derivatives and:
∂Wmf e = −
∂x
In the case of rotary, as opposed to linear, motion, torque T e takes the place of force f e and angular displacement θ takes the place of linear displacement x. Note that the product of torque and angle has the same units as the product of force and distance (both have units of work, which in the International System of units is Newton-meters or Joules.
In many cases we might consider a system which is electricaly linear, in which case inductance is a function only of the mechanical position x.
λ(x) = L(x)i
In this case, assuming that the energy integral is carried out from λ = 0 (so that the part of the integral carried out over x is zero),
λ 1 1 λ2
Wm = λdλ = 0 L(x) 2 L(x)
This makes
f e 1 λ2 ∂ 1
= −2 ∂x L(x)
5

Note that this is numerically equivalent to
f e = 1 i2 ∂ L(x)−
2 ∂x
This is true only in the case of a linear system. Note that substituting L(x)i = λ too early in the derivation produces erroneous results: in the case of a linear system it produces a sign error, but in the case of a nonlinear system it is just wrong.
3.1.1 Example: simple solenoid
Consider the magnetic actuator shown in cartoon form in Figure 5. The actuator consists of a circular rod of ferromagnetic material (very highly permeable) that can move axially (the x-direction) inside of a stationary piece, also made of highly permeable material. A coil of N turns carries a current I. The rod has a radius R and spacing from the flat end of the stator is the variable dimension x. At the other end there is a radial clearance between the rod and the stator g. Assume g ≪ R. If the axial length of the radial gaps is ℓ = R/2, the area of the radial gaps is the same as the area of the gap between the rod and the stator at the variable gap.
R/2
µ CLx R
g
N turns
µ
Figure 5: Solenoid Actuator
The permeances of the variable width gap is:
µ0πR2
=P1 x
and the permeance of the radial clearance gap is, if the gap dimension is small compared with the radius:
2µ0πRℓ µ0πR2
P2 = g
= g
The inductance of the coil system is:
L = N2
= N2 P1P2 =
µ0πR2N2
x + gR1 + R2 P2 + P2
Magnetic energy is:
6

λ0 λ2 x + gWm = idλ =
1 λ2
= 0
0 2 L(x) 2 µ0πR2N2
And then, of course, force of electric origin is:
∂Wm λ2 d 1 f e 0 = =−
∂x −
2 dx L(x)
Here that is easy to carry out:
d 1 1 =
dx L µ0πR2N2
So that the force is:
λ2 1 f e(x) = 0 −
2 µ0πR2N2
Given that the system is to be excited by a current, we may at this point substitute for flux:
µ0πR2Ni λ = L(x)i =
x + g
and then total force may be seen to be:
µ0πR2N2 i2
f e = − (x + g)2 2
The force is ‘negative’ in the sense that it tends to reduce x, or to close the gap.
3.1.2 Multiply Excited Systems
There may be (and in most electric machine applications there will be) more than one source of electrical excitation (more than one coil). In such systems we may write the conservation of energy expression as:
dWm = ikdλk − f edx k
which simply suggests that electrical input to the magnetic field energy storage is the sum (in this case over the index k) of inputs from each of the coils. To find the total energy stored in the system it is necessary to integrate over all of the coils (which may and in general will have mutual inductance).
Wm = i dλ ·
Of course, if the system is conservative, Wm(λ1, λ2, . . . , x) is uniquely specified and so the actual path taken in carrying out this integral will not affect the value of the resulting energy.
7

3.1.3 Coenergy
We often will describe systems in terms of inductance rather than its reciprocal, so that current, rather than flux, appears to be the relevant variable. It is convenient to derive a new energy variable, which we will call co-energy, by:
′ W = λiii − Wmm
i
and in this case it is quite easy to show that the energy differential is (for a single mechanical variable) simply:
′ dW = λkdik + f edx m
k
so that force produced is: ′∂W
fe = m
∂x
3.2 Example: Synchronous Machine
µ
µ
F
F
F’
F’
A’
A
A’
B
B’
B
B’
C
C’
C
C’
A
θ Rotor
Stator
Gap
Figure 6: Cartoon of Synchronous Machine
Consider a simple electric machine as pictured in Figure 6 in which there is a single winding on a rotor (call it the field winding and a polyphase armature with three identical coils spaced at uniform locations about the periphery. We can describe the flux linkages as:
λa = Laia + Labib + Labic + M cos(pθ)if
2π λb = Labia + Laib + Labic + M cos(pθ −
3 )if
2π λc = Labia + Labib + Laic + M cos(pθ +
3 )if
2π 2π λf = M cos(pθ)ia + M cos(pθ −
3 )ib + M cos(pθ +
3 ) + Lf if
It is assumed that the flux linkages are sinusoidal functions of rotor position. As it turns out, many electrical machines work best (by many criteria such as smoothness of torque production)
8

if this is the case, so that techniques have been developed to make those flux linkages very nearly sinusoidal. We will see some of these techniques in later chapters of these notes. For the moment, we will simply assume these dependencies. In addition, we assume that the rotor is magnetically ’round’, which means the stator self inductances and the stator phase to phase mutual inductances are not functions of rotor position. Note that if the phase windings are identical (except for their angular position), they will have identical self inductances. If there are three uniformly spaced windings the phase-phase mutual inductances will all be the same.
Now, this system can be simply described in terms of coenergy. With multiple excitation it is important to exercise some care in taking the coenergy integral (to ensure that it is taken over a valid path in the multi-dimensional space). In our case there are actually five dimensions, but only four are important since we can position the rotor with all currents at zero so there is no contribution to coenergy from setting rotor position. Suppose the rotor is at some angle θ and that the four currents have values ia0, ib0, ic0 and if0. One of many correct path integrals to take would be:
ia0 ′ Wm = Laiadia
0 ib0
+ (Labia0 + Laib) dib 0 ic0
+ (Labia0 + Labib0 + Laic) dic 0 if 0 2π 2π
+ M cos(pθ)ia0 + M cos(pθ − )ib0 + M cos(pθ + )ic0 + Lf if dif 0 3 3
The result is:
1′ Wm = La i2
co + Lab (iaoib0 + iaoic0 + icoib0)a0 + i2 b0 + i2
2 2π 2π 1
+Mif0 ia0 cos(pθ) + ib0 cos(pθ − ) + ic0 cos(pθ + ) + Lf i2
3 3 2 f0
Since there are no variations of the stator inductances with rotor position θ, torque is easily given by:
′∂W 2π 2π Te = m = −pMif0 ia0 sin(pθ) + ib0 sin(pθ − ) + ico sin(pθ + )
∂θ 3 3
3.2.1 Current Driven Synchronous Machine
Now assume that we can drive this thing with currents:
ia0 = Ia cos ωt 2π
ib0 = Ia cos ω t − 3 2π
ic0 = Ia cos ω t + 3
if0 = If
9

and assume the rotor is turning at synchronous speed:
pθ = ωt + δi
=Noting that cos x sin y 12 sin(x − y) + 12 sin(x + y), we find the torque expression above to be:
1 1 Te = −pMIaIf sin δi + sin (2ωt + δi)
2 2 1 1 4π
+ sin δi + sin 2ωt + δi −2 2 3 1 1 4π
+ sin δi + sin 2ωt + δi + 2 2 3
The sine functions on the left add and the ones on the right cancel, leaving:
3 Te = pMIaIf sin δi−
2
And this is indeed one way of looking at a synchronous machine, which produces steady torque if the rotor speed and currents all agree on frequency. Torque is related to the current torque angle
δi. As it turns out such machines are not generally run against current sources, but we will take up actual operation of such machines later.
4 Field Descriptions: Continuous Media
While a basic understanding of electromechanical devices is possible using the lumped parameter approach and the principle of virtual work as described in the previous section, many phenomena in electric machines require a more detailed understanding which is afforded by a continuum approach. In this section we consider a fields-based approach to energy flow using Poynting’s Theorem and then a fields based description of forces using the Maxwell Stress Tensor. These techniques will both be useful in further analysis of what happens in electric machines.
4.1 Field Description of Energy Flow: Poyting’s Theorem
Start with Faraday’s Law:
∂ B E =∇× −
∂t
and Ampere’s Law: H = J∇×
Multiplying the first of these by E and taking the difference: H and the second by
∂ H E − H = ∇ · E × H = − B
E JH · ∇ × E · ∇ × · dt
− ·
On the left of this expression is the divergence of electromagnetic energy flow:
S = E × H
10

Here, S is the celebrated Poynting flow which describes power in an electromagnetic field sysstem. (The units of this quantity is watts per square meter in the International System). On
the right hand side are two terms: ∂dt
~is rate of change of magnetic stored energy. The second H B ·
term, E J looks a lot like power dissipation. We will discuss each of these in more detail. For the · moment, however, note that the divergence theorem of vector calculus yields:
Sdv = © S nda volume
∇ · ·
that is, the volume integral of the divergence of the Poynting energy flow is the same as the Poynting energy flow over the surface of the volume in question. This integral becomes:
∂ B © S nda = H dv · −
volume E · J + ·
∂t
which is simply a realization that the total energy flow into a region of space is the same as the volume integral over that region of the rate of change of energy stored plus the term that looks like dissipation. Before we close this, note that, if there is motion of any material within the system, we can use the empirical expression for transformation of electric field between observers moving with respect to each other. Here the ’primed’ frame is moving with respeect to the ’unprimed’ frame with the velocity v
′ E = E + v × B
This transformation describes, for example, the motion of a charged particle such as an electron under the influence of both electric and magnetic fields. Now, if we assume that there is material motion in the system we are observing and if we assign v to be the velocity of that material, so that ′E is measured in a frame in which thre is no material motion (that is the frame of the material itself), the product of electric field and current density becomes:
′ ′ J − ′ E J = E − v × B · J = E v × B · J = E J + v· · · · J× B
In the last step we used the fact that in a scalar triple product the order of the scalar (dot) and vector (cross) products can be interchanged and that reversing the order of terms in a vector (cross) product simply changes the sign of that product. Now we have a ready interpretation for what we have calculated:
If the ’primed’ coordinate system is actually the frame of material motion,
1 ′ E J = · σ|J| 2
which is easily seen to be dissipation and is positive definite if material conductivity σ is positive. The last term is obviously conversion of energy from electromagnetic to mechanical form:
v J× B = v F· ·
where we have now identified force density to be:
F = J × B
11

This is the Lorentz Force Law, which describes the interaction of current with magnetic field to produce force. It is not, however, the complete story of force production in electromechanical systems. As we learned earlier, changes in geometry which affect magnetic stored energy can also produce force. Fortunately, a complete description of electromechanical force is possible using only magnetic fields and that is the topic of our next section.
4.2 Field Description of Forces: Maxwell Stress Tensor
Forces of electromagnetic origin, because they are transferred by electric and magnetic fields, are the result of those fields and may be calculated once the fields are known. In fact, if a surface can be established that fully encases a material body, the force on that body can be shown to be the integral of force density, or traction over that surface.
The traction τ derived by taking the cross product of surface current density and flux density on the air-gap surface of a machine (above) actually makes sense in view of the empirically derived Lorentz Force Law: Given a (vector) current density and a (vector) flux density. This is actually enough to describe the forces we see in many machines, but since electric machines have permeable magnetic material and since magnetic fields produce forces on permeable material even in the absence of macroscopic currents it is necessary to observe how force appears on such material. A suitable empirical expression for force density is:
1 H F = J × B −2
· H ∇µ
where H is the magnetic field intensity and µ is the permeability.Now, note that current density is the curl of magnetic field intensity, so that:
1 F = H × µH − H H ∇µ∇×
2 ·
1 = µ H H H ∇µ∇× × H −
2 ·
And, since: 1
H × H = H −2∇ H H∇× H · ∇ ·
force density is:
1 1 F = µ H − µ∇ H H H H ∇µH · ∇
2· −
2 ·
1 = µ µ H HH · ∇ H −∇
2 ·
This expression can be written by components: the component of force in the i’th dimension is:
∂ 1 Fi = µ Hk
∂xk Hi −
∂xi µ H2∂
2 k
k k
The first term can be written as:
∂ ∂ µ Hk Hi =
∂xk µHkHi − Hi µHk
∂
∂xk ∂xkk k k
12

The last term in this expression is easily shown to be divergence of magnetic flux density, which is zero:
∂ B = µHk = 0∇ ·
∂xkk
Using this, we can write force density in a more compact form as:
H2Fk = ∂
µHiHk − µδik n∂xi 2 n
where we have used the Kroneker delta δik = 1 if i = k, 0 otherwise. Note that this force density is in the form of the divergence of a tensor:
∂ Fk = Tik
∂xi
or F = ∇ · T
In this case, force on some object that can be surrounded by a closed surface can be found by using the divergence theorem:
f = Fdv = = © T nda vol vol
∇ · Tdv ·
or, if we note surface traction to be τi = k Tiknk , where n is the surface normal vector, then the total force in direction i is just:
f = τida = Tiknkda s k
The interpretation of all of this is less difficult than the notation suggests. This field description of forces gives us a simple picture of surface traction, the force per unit area on a surface. If we just integrate this traction over the area of some body we get the whole force on the body.
Note one more thing about this notation. Sometimes when subscripts are repeated as they are here the summation symbol is omitted. Thus we would write τi = k Tiknk = Tiknk.
4.3 Example: Linear Induction Machine
Figure 7 shows a highly simplified picture of a single sided linear induction motor. This is not how most linear induction machines are actually built, but it is possible to show through symmetry arguments that the analysis we can carry out here is actually valid for other machines of this class.
This machine consists of a stator (the upper surface) which is represented as a surface current on the surface of a highly permeable region. The moving element consists of a thin layer of conducting material on the surface of a highly permeable region. The moving element (or ’shuttle’) has a velocity u with respect to the stator and that motion is in the x direction. The stator surface current density is assumed to be:
Kz = Re K ej(ωt−kx) z
13

µ
µ
Kz
Ks
u
g
x
y
σs
Figure 7: Simple Model of single sided linear induction machine
Note that we are ignoring some important effects, such as those arising from finite length of thestator and of the shuttle. Such effects can be quite important, but we will leave those until later,as they are what make linear motors interesting.
Viewed from the shuttle for which the dimension in the direction of motion is x′ − x − ut′, therelative frequency is:
ωt − kx = (ω − ku) t − kx′ = ωst − kx′
Now, since the shuttle surface can support a surface current and is excited by magnetic fieldswhich are in turn excited by the stator currents, it is reasonable to assume that the form of rotorcurrent is the same as that of the stator:
Ks = Re
Ksej(ωst−kx′)
Ampere’s Law is, in this situation:
g∂Hy
∂x= Kz + Ks
which is, in complex amplitudes:
Hy =Kz + Ks
−jkg
The y- component of Faraday’s Law is, assuming the problem is uniform in the z- direction:
−jωsBy = jkE ′
z
orE′
z = −ωs
kµ0Hy
A bit of algebraic manipulation yields expressions for the complex amplitudes of rotor surfacecurrent and gap magnetic field:
Ks =−j µ0ωsσs
k2g
1 + j mu0ωsσs
k2g
Kz
Hy =j
kg
Kz
1 + j mu0ωsσs
k2g
14

To find surface traction, the Maxwell Stress Tensor can be evaluated at a surface just below the stator (on this surface the x- directed magnetic field is simply H = K . Thus the traction is x z
τx = Txy = µ0HxHy
and the average of this is: µ0
< τx >= Re HxH2 y∗
This is: µ0 1 z k2g
< τx >= |K |2 µ0ωsσs
2 kg 1 + µ0ωsσs
2
k2g
Now, if we consider electromagnetic power flow (Poynting’s Theorem): in the y- direction:
Sy = EzHx
′ And since in the frame of the shuttle Ez = −ωk s µ0Hy
µ0ωsσs
′ 1 ωs µ0
< S >=
k2gz = − ω
k s
< τx >y −2 k kg 1 + µ0ωsσs
2 |K | 2
k2g
Similarly, evaluated in the frame of the stator:
ω < Sy >= < τ − x > −
k
This shows what we already suspected: the electromagnetic power flow from the stator is the force density on the shuttle times the wave velocity. The electromagnetic ower flow into the shuttle is the same force density times the ’slip’ velocity. The difference between these two is the power converted to mechanical form and it is the force density times the shuttle velocity.
4.4 Rotating Machines
The use of this formulation in rotating machines is a bit tricky because, at lest formally, directional vectors must have constant identity if an integral of forces is to become a total force. In cylindrical coordinates, of course, the directional vectors are not of constant identity. However, with care and understanding of the direction of traction and how it is integrated we can make use of the MST approach in rotating electric machines.
Now, if we go back to the case of a circular cylinder and are interested in torque, it is pretty clear that we can compute the circumferential force by noting that the normal vector to the cylinder is just the radial unit vector, and then the circumferential traction must simply be:
τθ = µ0HrHθ
Assuming that there are no fluxes inside the surface of the rotor, simply integrating this over the surface gives azimuthal force. In principal this is the same as surrounding the surface of the rotor by a continuum of infinitely small boxes, one surface just outside the rotor and with a normal facing outward, the other surface just inside with normal facing inward. (Of course the MST is zero on this inner surface). Then multiplying by radius (moment arm) gives torque. The last step is to note that, if the rotor is made of highly permeable material, the azimuthal magnetic field just outside the rotor is equal to surface current density.
15

5 Generalization to Continuous Media
Now, consider a system with not just a multiplicity of circuits but a continuum of current-carrying paths. In that case we could identify the co-energy as:
′ W = λ(a)dJ dam area
·
where that area is chosen to cut all of the current carrying conductors. This area can be picked to be perpedicular to each of the current filaments since the divergence of current is zero. The flux λ is calculated over a path that coincides with each current filament (such paths exist since current has zero divergence). Then the flux is:
nλ(a) = B d·
Now, if we use the vector potential A for which the magnetic flux density is:
B = A∇×
the flux linked by any one of the current filaments is:
ℓλ(a) = A d·
where dℓ is the path around the current filament. This implies directly that the coenergy is:
W = A d′ ℓdJ dam area J
· ·
Now: it is possible to make dℓ coincide with da and be parallel to the current filaments, so that:
W = A d′ Jdv m vol
·
5.1 Permanent Magnets
Permanent magnets are becoming an even more important element in electric machine systems. Often systems with permanent magnets are approached in a relatively ad-hoc way, made equivalent to a current that produces the same MMF as the magnet itself.
The constitutive relationship for a permanent magnet relates the magnetic flux density B to magnetic field M .H and the property of the magnet itself, the magnetization
B = µ0 H + M
Now, the effect of the magnetization is to act as if there were a current (called an amperian current) with density:
J∗ = ∇× M
Note that this amperian current “acts” just like ordinary current in making magnetic flux density. Magnetic co-energy is:
′ W = Mdv m vol
A · ∇ × d
16

C D Now, Next, note the vector identity ∇ · C × D = D C − · ∇ × · ∇ ×
W = vol
−∇ · A × d Mdv ′ M dv + A d m
vol ∇× ·
B = A:Then, noting that ∇×
′ − © A × d vol
· Mdv W = Mds + B d m
The first of these integrals (closed surface) vanishes if it is taken over a surface just outside the magnet, where M is zero. Thus the magnetic co-energy in a system with only a permanent magnet source is
W = B d ′ Mdv m
vol ·
Adding current carrying coils to such a system is done in the obvious way.
17

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 2 Magnetic Circuit Basics September 5, 2005 c©2003 James L. Kirtley Jr.
1 Introduction
Magnetic Circuits offer, as do electric circuits, a way of simplifying the analysis of magnetic field systems which can be represented as having a collection of discrete elements. In electric circuits the elements are sources, resistors and so forth which are represented as having discrete currents and voltages. These elements are connected together with ‘wires’ and their behavior is described by network constraints (Kirkhoff’s voltage and current laws) and by constitutive relationships such as Ohm’s Law. In magnetic circuits the lumped parameters are called ‘Reluctances’ (the inverse of ‘Reluctance’ is called ‘Permeance’). The analog to a ‘wire’ is referred to as a high permeance magnetic circuit element. Of course high permeability is the analog of high conductivity.
By organizing magnetic field systems into lumped parameter elements and using network constraints and constitutive relationships we can simplify the analysis of such systems.
2 Electric Circuits
First, let us review how Electric Circuits are defined. We start with two conservation laws: conservation of charge and Faraday’s Law. From these we can, with appropriate simplifying assumptions, derive the two fundamental circiut constraints embodied in Kirkhoff’s laws.
2.1 KCL
Conservation of charge could be written in integral form as:
dρf© J~ · ~nda + dv = 0 (1) volume dt
This simply states that the sum of current out of some volume of space and rate of change of free charge in that space must be zero.
Now, if we define a discrete current to be the integral of current density crossing through a part of the surface:
ik = − J~ · ~nda (2) surfacek
and if we assume that there is no accumulation of charge within the volume (in ordinary circuit theory the nodes are small and do not accumulate charge), we have:
−
© J~ · ~nda = ik = 0 (3) k
1

~
~
which holds if the sum over the index k includes all current paths into the node. This is, of course, KCL.
2.2 KVL
Faraday’s Law is, in integral form:
~ ℓ = −E · d~ d B · ~nda (4)
dt
where the closed loop in the left hand side of the equation is the edge of the surface of the integral on the right hand side.
Now if we define voltage in the usual way, between points a and b for element k:
bk ~ ℓvk = E · d~ (5)
ak
Then, if we assume that the right-hand side of Faraday’s Law (that is, magnetic induction) is zero, the loop equation becomes:
vk = 0 (6) k
This works for circuit analysis because most circuits do not involve magnetic induction in the loops. However, it does form the basis for much head scratching over voltages encountered by ‘ground loops’.
2.3 Constitutive Relationship: Ohm’s Law
Many of the materials used in electric circuits carry current through a linear conduction mechanism. That is, the relationship between electric field and electric current density is
J = σ ~~ E (7)
Suppose, to start, we can identify a piece of stuff which has constant area and which is carrying current over some finite length, as shown in Figure 1. Assume this rod is carrying current density J~ (We won’t say anything about how this current density managed to get into the rod, but assume that it is connected to something that can carry current (perhaps a wire....). Total current carried by the rod is simply
I = |J |A
and then voltage across the element is:
ℓ v = E · dℓ = I
σA
from which we conclude the resistance is
V ℓ R = =
I σA
2

J E
l
Figure 1: Simple Rod Shaped Resistor
Of course we can still employ the lumped parameter picture even with elements that are more complex. Consider the annular resistor shown in Figure 2. This is an end-on view of something which is uniform in cross-section and has depth D in the direction you can’t see. Assume that the inner and outer elements are very good conductors, relative to the annular element in between. Assume further that this element has conductivity σ and inner and outer radii Ri and Ro, respectively.
Electrodes +v−
Resistive Material
Figure 2: Annular Resistor
Now, if the thing is carrying current from the inner to the outer electrode, current density would be:
I J~ = ~irJr(r) =
2πDr
Electric field is
Er = Jr
σ =
I
2πDrσ
Then voltage is
v =
Ro
Ri
Er(r) = I
2πσD log
Ro
Ri
so that we conclude the resistance of this element is
log Ro
R = Ri
2πσD
3

~
3 Magnetic Circuit Analogs
In the electric circuit, elements for which voltage and current are defined are connected together by elements thought of as ‘wires’, or elements with zero or negligible voltage drop. The interconnection points are ‘nodes’. In magnetic circuits the analogous thing occurs: elements for which magnetomotive force and flux can be defined are connected together by high permeability magnetic circuit elements (usually iron) which are the analog of wires in electric circuits.
3.1 Analogy to KCL
Gauss’ Law is:
© B · ~nda = 0 (8)
which means that the total amount of flux coming out of a region of space is always zero. Now, we will define a quantity which is sometimes called simply ‘flux’ or a ‘flux tube’. This
might be thought to be a collection of flux lines that can somehow be bundled together. Generally it is the flux that is identified with a magnetic circuit element. Mathematically it is:
Φk = B · ~~ nda (9)
In most cases, flux as defined above is carried in magnetic circuit elements which are made of high permeability material, analogous to the ‘wires’ of high conductivity material which carry current in electric circuits. It is possible to show that flux is largely contained in such high permeability materials.
If all of the flux tubes out of some region of space (’node’) are considered in the sum, they must add to zero:
Φk = 0 (10) k
3.2 Analogy to KVL: MMF
Ampere’s Law is
H · d~~ ℓ = J~ · ~nda (11)
Where, as for Faraday’s Law, the closed contour on the left is the periphery of the (open) surface on the right. Now we define what we call Magnetomotive Force, in direct analog to ‘Electromotive Force’, (voltage).
bk ~ ℓFk = H · d~ (12)
ak
Further, define the current enclosed by a loop to be:
F0 = J~ · ~nda (13)
Then the analogy to KVL is: Fk = F0
k
4

Note that the analog is not exact as there is a source term on the right hand side whereas KVL has no source term. Note also that sign counts here. The closed integral is taken in such direction so that the positive sense of the surface enclosed is positive (upwards) when the surface is to the left of the contour. (This is another way of stating the celebrated ‘right hand rule’: if you wrap your right hand around the contour with your fingers pointing in the direction of the closed contour integration, your thumb is pointing in the positive direction for the surface).
3.3 Analog to Ohm’s Law: Reluctance
Consider a ‘gap’ between two high permeability pieces as shown in Figure 3. If we assume that their permeability is high enough, we can assume that there is no magnetic field H in them and so the MMF or ‘magnetic potential’ is essentially constant, just like in a wire. For the moment, assume that the gap dimension g is ‘small’ and uniform over the gap area A. Now, assume that some flux Φ is flowing from one of these to the other. That flux is
Φ = BA
where B is the flux density crossing the gap and A is the gap area. Note that we are ignoring ‘fringing’ fields in this simplified analysis. This neglect often requires correction in practice. Since the permeability of free space is µ0, (assuming the gap is indeed filled with ’free space’), magnetic field intensity is
B H =
µ0
and gap MMF is just magnetic field intensity times gap dimension. This, of course, assumes that the gap is uniform and that so is the magnetic field intensity:
B F = g
µ0
Which means that the reluctance of the gap is the ratio of MMF to flux:
F gR = = Φ µ0A
Φ
y Area A
x µ
g
Figure 3: Air Gap
5

3.4 Simple Case
Consider the magnetic circuit situation shown in Figure 4. Here there is a piece of highly permeable material shaped to carry flux across a single air-gap. A coil is wound through the window in the magnetic material (this shape is usually referred to as a ‘core’). The equivalent circuit is shown in Figure 5.
Region 1
Region 2 I
Figure 4: Single air-capped Core
Note that in Figure 4, if we take as the positive sense of the closed loop a direction which goes vertically upwards through the leg of the core through the coil and then downwards through the gap, the current crosses the surface surrounded by the contour in the positive sense direction.
+F = N I Φ
−
Figure 5: Equivalent Circuit
3.5 Flux Confinement
The gap in this case has the same reluctance as computed earlier, so that the flux in the gap is simply Φ = NI . Now, by focusing on the two regions indicated we might make a few observations
R
about magnetic circuits. First, consider ‘region 1’ as shown in Figure 6.
µ
Figure 6: Flux Confinement Boundary: This is ’Region 1’
6

In this picture, note that magnetic field ~H parallel to the surface must be the same inside the material as it is outside. Consider Ampere’s Law carried out about a very thin loop consisting of the two arrows drawn at the top boundary of the material in Figure 6 with very short vertical paths joining them. If there is no current singularity inside that loop, the integral around it must be zero which means the magnetic field just inside must be the same as the magnetic field outside. Since
B = µH, and ’highly permeable’ means µ is very large, the material is very highly permeable and ~ ~
unless B is really large, ~H must be quite small. Thus the magnetic circuit has small magnetic field H and therfore flux densities parallel to and just outside its boundaries aer also small.
B is perpendicular
µ
Figure 7: Gap Boundary
At the surface of the magnetic material, since the magnetic field parallel to the surface must be very small, any flux lines that emerge from the core element must be perpendicular to the surface as shown for the gap region in Figure 7. This is true for region 1 as well as for region 2, but note that the total MMF available to drive fields across the gap is the same as would produce field lines from the area of region 1. Since any lines emerging from the magnetic material in region 1 would have very long magnetic paths, they must be very weak. Thus the magnetic circuit material largely confines flux, with only the relatively high permeance (low reluctance) gaps carrying any substantive amount of flux.
3.6 Example: C-Core
Consider a ‘gapped’ c-core as shown in Figure 8. This is two pieces of highly permeable material shaped generally like ‘C’s. They have uniform depth in the direction you cannot see. We will call that dimension D. Of course the area A = wD, where w is the width at the gap. We assume the two gaps have the same area. Each of the gaps will have a reluctance
gR = µ0A
Suppose we wind a coil with N turns on this core as shown in Figure 9. Then we put a current I in that coil. The magnetic circuit equivalent is shown in Figure 10. The two gaps are in series and, of course, in series with the MMF source. Since the two fluxes are the same and the MMF’s add:
F0 = NI = F1 + F2 = 2RΦ
and then
NI µ0ANI Φ = =
2R 2g
7

µ g
Area A
Figure 8: Gapped Core
Φ
N Turns
I
Figure 9: Wound, Gapped Core
and corresponding flux density in the gaps would be:
µ0NI By =
2g
3.7 Example: Core with Different Gaps
As a second example, consider the perhaps oddly shaped core shown in Figure 11. Suppose the gap on the right has twice the area as the gap on the left. We would have two gap reluctances:
g gR1 = R2 = µ0A 2µ0A
Since the two gaps are in series the flux is the same and the total reluctance is
3 gR = 2 µ0A
Flux in the magnetic circuit loop is
F 2 µ0ANI Φ = = R 3 g
and the flux density across, say, the left hand gap would be:
Φ 2 µ0NI By = =
A 3 g
8

F +−
Φ
Figure 10: Equivalent Magnetic Circuit
Φ
N Turns
I
Figure 11: Wound, Gapped Core: Different Gaps
9

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 3: Eddy Currents, Surface Impedances and Loss Mechanisms
September 5, 2005 c©2005 James L. Kirtley Jr.
1 Introduction
Losses in electric machines arise from conduction and magnetic hysteresis. Conduction losses are attributed to straightforward transport conduction and to eddy currents. Transport losses are relatively easy to calculate so we will not pay them much attention. Eddy currents are more interesting and result in frequency dependent conduction losses in machines.
Eddy currents in linear materials can often be handled rigorously, but eddy currents in saturating material are more difficult and are often handled in a heuristic fashion. We present here both analytical and semi-emiprical ways of dealing with such losses.
We start with surface impedance: the ratio of electric field to surface current. This is important not just in calculating machine losses, but also in describing how some machines operate.
2 Surface Impedance of Uniform Conductors
The objective of this section is to describe the calculation of the surface impedance presented by a layer of conductive material. Two problems are considered here. The first considers a layer of linear
material backed up by an infinitely permeable surface. This is approximately the situation presented by, for example, surface mounted permanent magnets and is probably a decent approximation to the conduction mechanism that would be responsible for loss due to asynchronous harmonics in these machines. It is also appropriate for use in estimating losses in solid rotor induction machines and in the poles of turbogenerators. The second problem, which we do not work here but simply present the previously worked solution, concerns saturating ferromagnetic material.
2.1 Linear Case
The situation and coordinate system are shown in Figure 1. The conductive layer is of thicknes T and has conductivity σ and permeability µ0. To keep the mathematical expressions within bounds, we assume rectilinear geometry. This assumption will present errors which are small to the extent that curvature of the problem is small compared with the wavenumbers encountered. We presume that the situation is excited, as it would be in an electric machine, by a current sheet of the form
Kz = Re Kej(ωt−kx)
In the conducting material, we must satisfy the diffusion equation:
∂H ∇2H = µ0σ ∂t
1

Conductive Region
x
y
Permeable
H
x
zK
Surface
Figure 1: Axial View of Magnetic Field Problem
In view of the boundary condition at the back surface of the material, taking that point to be y = 0, a general solution for the magnetic field in the material is:
Hx = Re A sinhαyej(ωt−kx)
k
Hy = Re j A coshαyej(ωt−kx)
α
where the coefficient α satisfies: α2 = jωµ0σ + k2
and note that the coefficients above are chosen so that H has no divergence. Note that if k is small (that is, if the wavelength of the excitation is large), this spatial coefficient
α becomes 1 + j
α = δ
where the skin depth is:
2 δ =
ωµ0σ
Faraday’s law: ∂B ∇× E = −∂t
gives: ω
E = −µ0 Hz k y
Now: the “surface current” is just K = −Hxs
so that the equivalent surface impedance is:
E ω Z = z = jµ0 cothαT
α−Hx
A pair of limits are interesting here. Assuming that the wavelength is long so that k is negligible, then if αT is small (i.e. thin material),
ω 1 Z → jµ0 =
α2T σT
2

On the other hand as αT → ∞, 1 + j
Z → σδ
Next it is necessary to transfer this surface impedance across the air-gap of a machine. So, assume a new coordinate system in which the surface of impedance Z is located at y = 0, and we s
wish to determine the impedance Z = −Ez/Hx at y = g. In the gap there is no current, so magnetic field can be expressed as the gradient of a scalar
potential which obeys Laplace’s equation:
H = −∇ψ
and ∇ 2ψ = 0
Ignoring a common factor of ej(ωt−kx), we can express H in the gap as:
−ky H = jk ψ + eky + ψ ex −
−ky H = −k ψ eky − ψ − ey +
At the surface of the rotor, E = −HxZz s
or −ωµ0 = jkZs ψ
+ + ψψ
+ − ψ
− −
and then, at the surface of the stator,
ekg − ψ −
−kg eZ =
Ez = jµ0 ω ψ
+
ekg + ψ e−kg −Hx k ψ
+ −
A bit of manipulation is required to obtain:
ω ekg (ωµ0 − jkZs) − e−kg (ωµ0 + jkZs)Z = jµ0 k ekg (ωµ0 − jkZs) + e−kg (ωµ0 + jkZs)
It is useful to note that, in the limit of Zs → ∞, this expression approaches the gap impedance
ωµ0Z = jg k2g
and, if the gap is small enough that kg → 0,
Z Z s→ g||Z
3

~
~ ~
~ ~
3 Iron
Electric machines employ ferromagnetic materials to carry magnetic flux from and to appropriate places within the machine. Such materials have properties which are interesting, useful and problematical, and the designers of electric machines must deal with this stuff. The purpose of this note is to introduce the most salient properties of the kinds of magnetic materials used in electric machines.
We will be concerned here with materials which exhibit magnetization: flux density is something other than ~B = µ0H. Generally, we will speak of hard and soft magnetic materials. Hard materials are those in which the magnetization tends to be permanent, while soft materials are used in magnetic circuits of electric machines and transformers. Since they are related we will find ourselves talking about them either at the same time or in close proximity, even though their uses are widely disparite.
3.1 Magnetization:
It is possible to relate, in all materials, magnetic flux density to magnetic field intensity with a consitutive relationship of the form:
B = µ0 H + ~~ ~ M
where magnetic field intensity H and magnetization M are the two important properties. Now, in linear magnetic material magnetization is a simple linear function of magnetic field:
M = χmH
so that the flux density is also a linear function:
B = µ0 (1 + χm)H
Note that in the most general case the magnetic susceptibility χm might be a tensor, leading to flux density being non-colinear with magnetic field intensity. But such a relationship would still be linear. Generally this sort of complexity does not have a major effect on electric machines.
3.2 Saturation and Hysteresis
In useful magnetic materials this nice relationship is not correct and we need to take a more general view. We will not deal with the microscopic picture here, except to note that the magnetization is due to the alignment of groups of magnetic dipoles, the groups often called domaines. There are only so many magnetic dipoles available in any given material, so that once the flux density is high enough the material is said to saturate, and the relationship between magnetic flux density and magnetic field intensity is nonlinear.
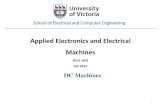
Shown in Figure 2, for example, is a “saturation curve” for a magnetic sheet steel that is sometimes used in electric machinery. Note the magnetic field intensity is on a logarithmic scale. If this were plotted on linear coordinates the saturation would appear to be quite abrupt.
At this point it is appropriate to note that the units used in magnetic field analysis are not always the same nor even consistent. In almost all systems the unit of flux is the weber (Wb),
4

Figure 2: Saturation Curve: Commercial M-19 Silicon Iron
5
Courtesy of United States Steel Corporation. (U.S. Steel).U.S. Steel accepts no liability for reliance on any information contained in the graphs shown above.

Magnetic
FieldCoercive Field
Hc
Remanent
Flux Density Br
Saturation
Field H s
Saturation Flux
Density Bs
Flux
Density
Figure 3: Hysteresis Curve Nomenclature
which is the same as a volt-second. In SI the unit of flux density is the tesla (T), but many people refer to the gauss (G), which has its origin in CGS. 10,000 G = 1 T. Now it gets worse, because there is an English system measure of flux density generally called kilo-lines per square inch. This is because in the English system the unit of flux is the line. 108 lines is equal to a weber. Thus a Tesla is 64.5 kilolines per square inch.
The SI and CGS units of flux density are easy to reconcile, but the units of magnetic field are a bit harder. In SI we generally measure H in amperes/meter (or ampere-turns per meter). Often, however, you will see magnetic field represented as Oersteds (Oe). One Oe is the same as the magnetic field required to produce one gauss in free space. So 79.577 A/m is one Oe.
In most useful magnetic materials the magnetic domaines tend to be somewhat “sticky”, and a more-than-incremental magnetic field is required to get them to move. This leads to the property called “hysteresis”, both useful and problematical in many magnetic systems.
Hysteresis loops take many forms; a generalized picture of one is shown in Figure 3. Salient features of the hysteresis curve are the remanent magnetization Br and the coercive field Hc. Note that the actual loop that will be traced out is a function of field amplitude and history. Thus there are many other “minor loops” that might be traced out by the B-H characteristic of a piece of material, depending on just what the fields and fluxes have done and are doing.
Hysteresis is important for two reasons. First, it represents the mechanism for “trapping” magnetic flux in a piece of material to form a permanent magnet. We will have more to say about that anon. Second, hysteresis is a loss mechanism. To show this, consider some arbitrary chunk of material for which we can characterize an MMF and a flux:
~ ℓF = N I = H d~·
V
~ AΦ = dt = B d ~N Area
·
6

~
Energy input to the chunk of material over some period of time is
w = V Idt = FdΦ = H d~ d ~ d ~~ ℓ B A dt t
· ·
Now, imagine carrying out the second (double) integral over a continuous set of surfaces which are perpendicular to the magnetic field H. (This IS possible!). The energy becomes:
~ Bdvol dt w = H d ~t
·
and, done over a complete cycle of some input waveform, that is:
w = Wmdvol vol
~ BWm = H d ~t
·
That last expression simply expresses the area of the hysteresis loop for the particular cycle. Generally, for most electric machine applications we will use magnetic material characterized
as “soft”, having as narrow a hysteresis loop (and therefore as low a hysteretic loss) as possible. At the other end of the spectrum are “hard” magnetic materials which are used to make permanent magnets. The terminology comes from steel, in which soft, annealed steel material tends to have narrow loops and hardened steel tends to have wider loops. However permanent magnet technology has advanced to the point where the coercive forces possible in even cheap ceramic magnets far exceed those of the hardest steels.
3.3 Conduction, Eddy Currents and Laminations:
Steel, being a metal, is an electrical conductor. Thus when time varying magnetic fields pass through it they cause eddy currents to flow, and of course those produce dissipation. In fact, for almost all applications involving “soft” iron, eddy currents are the dominant source of loss. To reduce the eddy current loss, magnetic circuits of transformers and electric machines are almost invariably laminated, or made up of relatively thin sheets of steel. To further reduce losses the steel is alloyed with elements (often silicon) which poison the electrical conductivity.
There are several approaches to estimating the loss due to eddy currents in steel sheets and in the surface of solid iron, and it is worthwhile to look at a few of them. It should be noted that this is a “hard” problem, since the behavior of the material itself is difficult to characterize.
3.4 Complete Penetration Case
Consider the problem of a stack of laminations. In particular, consider one sheet in the stack represented in Figure 4. It has thickness t and conductivity σ. Assume that the “skin depth” is much greater than the sheet thickness so that magnetic field penetrates the sheet completely. Further, assume that the applied magnetic flux density is parallel to the surface of the sheets:
jωt B = ~izRe √
2B0e
7

t
y
x z
Figure 4: Lamination Section for Loss Calculation
Now we can use Faraday’s law to determine the electric field and therefore current density in the sheet. If the problem is uniform in the x- and z- directions,
∂Ex
∂y = −jω0B0
Note also that, unless there is some net transport current in the x- direction, E must be antisymmetric about the center of the sheet. Thus if we take the origin of y to be in the center, electric field and current are:
E = −jωB0yx
J = −jωB0σy x
Local power dissipated is
P (y) = ω2B02σy 2 =
|J |2
σ To find average power dissipated we integrate over the thickness of the lamination:
2 t 2
t 22 1
ω2B02σ 2 ω2B2
0 t2σ< P >= P (y)dy = dy =y
12 t t0 0
Pay attention to the orders of the various terms here: power is proportional to the square of flux density and to the square of frequency. It is also proportional to the square of the lamination thickness (this is average volume power dissipation).
As an aside, consider a simple magnetic circuit made of this material, with some length ℓ and area A, so that volume of material is ℓA. Flux lined by a coil of N turns would be:
Λ = NΦ = NAB0
and voltage is of course just V = jwL. Total power dissipated in this core would be:
1 V 2
Pc = Aℓ ω2B02t2σ =
12 Rc
where the equivalent core resistance is now
A 12N2Rc =
ℓ σt2
8

B
H
B 0
Figure 5: Idealized Saturating Characteristic
3.5 Eddy Currents in Saturating Iron
The same geometry holds for this pattern, although we consider only the one-dimensional problem (k → 0). The problem was worked by McLean and his graduate student Agarwal [2] [1]. They assumed that the magnetic field at the surface of the flat slab of material was sinusoidal in time and of high enough amplitude to saturate the material. This is true if the material has high permeability and the magnetic field is strong. What happens is that the impressed magnetic field saturates a region of material near the surface, leading to a magnetic flux density parallel to the surface. The depth of the region affected changes with time, and there is a separating surface (in the flat problem this is a plane) that moves away from the top surface in response to the change in the magnetic field. An electric field is developed to move the surface, and that magnetic field drives eddy currents in the material.
Assume that the material has a perfectly rectangular magnetization curve as shown in Figure 5, so that flux density in the x- direction is:
Bx = B0sign(Hx)
The flux per unit width (in the z- direction) is:
−∞
Φ = Bxdy 0
and Faraday’s law becomes: ∂Φ
Ez = ∂t
while Ampere’s law in conjunction with Ohm’s law is:
∂Hx = σEz
∂y
Now, McLean suggested a solution to this set in which there is a “separating surface” at depth ζ below the surface, as shown in Figure 6 . At any given time:
yHx = Hs(t) 1 +
ζ Hs
Jz = σEz = ζ
9

y
x
Separating Surface
B
B s
s
Penetration
Depth
Figure 6: Separating Surface and Penetration Depth
That is, in the region between the separating surface and the top of the material, electric field Ez is uniform and magnetic field Hx is a linear function of depth, falling from its impressed value at the surface to zero at the separating surface. Now: electric field is produced by the rate of change of flux which is:
∂Φ ∂ζ Ez = = 2Bx
∂t ∂t Eliminating E, we have:
∂ζ Hs2ζ = ∂t σBx
and then, if the impressed magnetic field is sinusoidal, this becomes:
dζ2 H0 = σB0
| sin ωtdt
|
This is easy to solve, assuming that ζ = 0 at t = 0,
2H0 ωt ζ = sin
ωσB0 2
Now: the surface always moves in the downward direction (as we have drawn it), so at each half cycle a new surface is created: the old one just stops moving at a maximum position, or penetration depth:
2H0δ =
ωσB0
This penetration depth is analogous to the “skin depth” of the linear theory. However, it is an absolute penetration depth.
The resulting electric field is:
2H0 ωt Ez = cos 0 < ωt < π
σδ 2
This may be Fourier analyzed: noting that if the impressed magnetic field is sinusoidal, only the time fundamental component of electric field is important, leading to:
8 H0Ez = (cos ωt + 2 sin ωt + . . .)
3π σδ
10

4
Complex surface impedance is the ratio between the complex amplitude of electric and magnetic field, which becomes:
E 8 1 Z = z = (2 + j)s H 3π σδ x
Thus, in practical applications, we can handle this surface much as we handle linear conductive surfaces, by establishing a skin depth and assuming that current flows within that skin depth of the surface. The resistance is modified by the factor of 16 and the “power factor” of this surface is 3π
about 89 % (as opposed to a linear surface where the “power factor” is about 71 %. Agarwal suggests using a value for B0 of about 75 % of the saturation flux density of the steel.
Semi-Empirical Method of Handling Iron Loss
Neither of the models described so far are fully satisfactory in describing the behavior of laminated iron, because losses are a combination of eddy current and hysteresis losses. The rather simple model employed for eddy currents is precise because of its assumption of abrupt saturation. The hysteresis model, while precise, would require an empirical determination of the size of the hysteresis loops anyway. So we must often resort to empirical loss data. Manufacturers of lamination steel sheets will publish data, usually in the form of curves, for many of their products. Here are a few ways of looking at the data.
A low frequency flux density vs. magnetic field (“saturation”) curve was shown in Figure 2. Included with that was a measure of the incremental permeability
dB ′ µ =
dH
In some machine applications either the “total” inductance (ratio of flux to MMF) or “incremental” inductance (slope of the flux to MMF curve) is required. In the limit of low frequency these numbers may be useful.
For designing electric machines, however, a second way of looking at steel may be more useful. This is to measure the real and reactive power as a function of magnetic flux density and (sometimes) frequency. In principal, this data is immediately useful. In any well-designed electric machine the flux density in the core is distributed fairly uniformly and is not strongly affected by eddy currents, etc. in the core. Under such circumstances one can determine the flux density in each part of the core. With that information one can go to the published empirical data for real and reactive power and determine core loss and reactive power requirements.
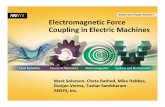
Figure 7 shows core loss and “apparent” power per unit mass as a function of (RMS) induction for 29 gage, fully processed M-19 steel. The two left-hand curves are the ones we will find most useful. “P ” denotes real power while “Pa ” denotes “apparent power”. The use of this data is quite straightforward. If the flux density in a machine is estimated for each part of the machine and the mass of steel calculated, then with the help of this chart a total core loss and apparent power can be estimated. Then the effect of the core may be approximated with a pair of elements in parallel with the terminals, with:
Rc = q|V |2
P
Xc = q|V |2
Q
11

Figure 7: Real and Apparent Loss: M19, Fully Processed, 29 Ga
12
Courtesy of United States Steel Corporation. (U.S. Steel).U.S. Steel accepts no liability for reliance on any information contained in the graphs shown above.

M-19, 29 Ga, Fully Processed
0.01
0.1
1
10
100
10 100 1000 10000
Lo
ss, W
/Lb
0.1 T
0.3 T
0.5 T
0.7 T
1.0 T
Flux Density
Frequency, Hz
Figure 8: Steel Sheet Core Loss Fit vs. Flux Density and Frequency
Q = Pa 2 − P 2
Where q is the number of machine phases and V is phase voltage. Note that this picture is, strictly speaking, only valid for the voltage and frequency for which the flux density was calculated. But it will be approximately true for small excursions in either voltage or frequency and therefore useful for estimating voltage drop due to exciting current and such matters. In design program applications these parameters can be re-calculated repeatedly if necessary.
“Looking up” this data is a bit awkward for design studies, so it is often convenient to do a “curve fit” to the published data. There are a large number of possible ways of doing this. One method that has been found to work reasonably well for silicon iron is an “exponential fit”:
B ǫB f
ǫF
P ≈ P0 B0 f0
This fit is appropriate if the data appears on a log-log plot to lie in approximately straight lines. Figure 8 shows such a fit for the same steel sheet as the other figures.
For “apparent power” the same sort of method can be used. It appears, however, that the simple exponential fit which works well for real power is inadequate, at least if relatively high inductions are to be used. This is because, as the steel saturates, the reactive component of exciting current rises rapidly. I have had some success with a “double exponential” fit:
B ǫ0 B
ǫ1
VA ≈ VA0 + VA1B0 B0
13

Table 1: Exponential Fit Parameters for Two Steel Sheets
29 Ga, Fully Processed M-19 M-36
Base Flux Density B0 1 T 1 T Base Frequency f0 60 Hz 60 Hz Base Power (w/lb) P0 0.59 0.67 Flux Exponent ǫB 1.88 1.86 Frequency Exponent ǫF 1.53 1.48 Base Apparent Power 1 V A0 1.08 1.33 Base Apparent Power 2 V A1 .0144 .0119 Flux Exponent ǫ0 1.70 2.01 Flux Exponent ǫ1 16.1 17.2
To first order the reactive component of exciting current will be linear in frequency.
References
[1] W. MacLean, “Theory of Strong Electromagnetic Waves in Massive Iron”, Journal of Applied Physics, V.25, No 10, October, 1954
[2] P.D. Agarwal, “Eddy-Current Losses in Solid and Laminated Iron”, Trans. AIEE, V. 78, pp 169-171, 1959
14

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 4: Elementary Synchronous Machine Models September 14, 2005 c©2005 James L. Kirtley Jr.
1 Introduction
The objective here is to develop a simple but physically meaningful model of the synchronous machine, one of the major classes of electric machine. We can look at this model from several different directions. This will help develop an understanding of analysis of machines, particularly in cases where one or another analytical picture is more appropriate than others. Both operation and sizing will be of interest here.
Along the way we will approach machine windings from two points of view. On the one hand, we will approximate windings as sinusoidal distributions of current and flux linkage. Then we will take a concentrated coil point of view and generalize that into a more realistic and useful winding model.
2 Physical Picture: Current Sheet Description
Consider this simple picture. The ‘machine’ consists of a cylindrical rotor and a cylindrical stator which are coaxial and which have sinusoidal current distributions on their surfaces: the outer surface of the rotor and the inner surface of the stator.
R
g
Stator
Rotor
Kz s
Kz r z
θ r
µ → ∞
µ → ∞
Figure 1: Elementary Machine Model: Axial View
The ‘rotor’ and ‘stator’ bodies are made of highly permeable material (we approximate this as being infinite for the time being, but this is something that needs to be looked at carefully later).
1

We also assume that the rotor and stator have current distributions that are axially (z) directed and sinusoidal:
KS = KS cos pθ z
KR = KR cos p (θ − φ)z
Here, the angle φ is the physical angle of the rotor. The current distribution on the rotor is fixed with respect to the rotor. Now: assume that the air-gap dimension g is much less than the radius: g << R. It is not difficult to show that with this assumption the radial flux density Br is nearly uniform across the gap (i.e. not a function of radius) and obeys:
∂Br KzS + KR
z = ∂Rθ
−µ0 g
Then the radial magnetic flux density for this case is simply:
µ0R Br = (KS sin pθ + KR sin p (θ − φ)) −
pg
Now it is possible to compute the traction on rotor and stator surfaces by recognizing that the surface current distributions are the azimuthal magnetic fields: at the surface of the stator, Hθ = −Kz
S, and at the surface of the rotor, Hθ = KR . So at the surface of the rotor, traction is: z
µ0R τθ = Trθ = (KS sin pθ + KR sin p (θ − φ))KR cos p (θ − φ)−
pg
The average of that is simply:
µ0R < τθ >= KSKR sin pφ −
2pg
The same exercise done at the surface of the stator yields the same results (with opposite sign). To find torque, use:
T = 2πR2ℓ < τθ >= µ0πR
3ℓKSKR sin pφ
pg
We pause here to make a few observations:
1. For a given value of surface currents Ks and Kr, torque goes as the third power of linear dimension. That implies that the the achieved shear stres is constant with machine size. And the ratio of machine torque density to machine volume is constant.
2. If, on the other hand, gap is held constant, torque goes as the fourth power of machine volume. Since the volume of the machine goes as the third power, this implies that torque capability goes as the 4/3 power of machine volume.
3. Actually, this understates the situation since the assumed surface current densities are the products of volume current densities and winding depth, which one would expect to increase with machine size. As machine radius grows one would expect both stator and rotor surface current densities to grow. Thus machine torque (and power) densities tend to increase somewhat faster than linearly with machine volume.
2

3
4. The current distributions want to align with each other. In actual practice what is done is to generate a stator current distribution which is not static as implied here but which rotates in space:
KS = KS cos (pθ − ωt)z
and this pulls the rotor along.
5. For a given pair of current distributions there is a maximum torque that can be sustained, but as long as the torque that is applied to the rotor is less than that value the rotor will adjust to the correct angle.
Continuous Approximation to Winding Patterns:
Now let’s try to produce those surface current distributions with physical windings. In fact we can’t do exactly that yet, but we can approximate a physical winding with a turns distribution that would look like:
NS nS = cos pθ
2R NR
nR = cos p (θ − φ)2R
Note that this implies that NS and NR are the total number of turns on the rotor and stator. i.e.:
π 2
p −
π 2
nSRdθ = NS
Then the surface current densities are as we assumed above, with:
NSIS NRIRKS = KR =
2R 2R
So far nothing is different, but with an assumed number of turns we can proceed to computing inductances. It is important to remember what these assumed winding distributions mean: they are the density of wires along the surface of the rotor and stator. A positive value implies a wire with sense in the +z direction, a negative value implies a wire with sense in the -z direction. That is, if terminal current for a winding is positive, current is in the +z direction if n is positive, in the -z direction if n is negative. In fact, such a winding would be made of elementary coils with one half (the negatively going half) separated from the other half (the positively going half) by a physical angle of π/p. So the flux linked by that elemental coil would be:
θ ′ ′ Φi(θ) = µ0Hr(θ )ℓRdθ
θ−π/p
So, if only the stator winding is excited, radial magnetic field is:
NSISHr = sin pθ −
2gp
3

and thus the elementary coil flux is:
µ0NSISℓR Φi(θ) = cos pθ
p2g
Now, this is flux linked by an elementary coil. To get flux linked by a whole winding we must ‘add up’ the flux linkages of all of the elementary coils. In our continuous approximation to the real coil this is the same as integrating over the coil distribution:
λS p
= p −
π 2
π 2p
Φi(θ)nS(θ)Rdθ
This evaluates fairly easily to: π ℓRN 2
λS = µ0 S Is
4 gp2
which implies a self-inductance for the stator winding of:
π ℓRN 2
LS = µ0 S
4 gp2
The same process can be used to find self-inductance of the rotor winding (with appropriate changes of spatial variables), and the answer is:
π ℓRN 2
LR = µ0 R
4 gp2
To find the mutual inductance between the two windings, excite one and compute flux linked by the other. All of the expressions here can be used, and the answer is:
π ℓRNSNRM (φ) = µ0
4 gp2 cos pφ
Now it is fairly easy to compute torque using conventional methods. Assuming both windings are excited, magnetic coenergy is:
1′ W = LSI
2 1 LRI
2 S + R + M (φ)ISIRm 2 2
and then torque is:′∂W π ℓRNSNR
T = m = −µ0 ISIR sin pφ ∂φ 4 gp
and then substituting for NSIS and NRIR:
NSIS = 2RKS
NRIR = 2RKR
we get the same answer for torque as with the field approach:
T = 2πR2ℓ < τθ >= µ0πR
3ℓKSKR sin pφ −
pg
4

4 Classical, Lumped-Parameter Synchronous Machine:
Now we are in a position to examine the simplest model of a polyphase synchronous machine. Suppose we have a machine in which the rotor is the same as the one we were considering, but the stator has three separate windings, identical but with spatial orientation separated by an electrical angle of 120 = 2π/3. The three stator windings will have the same self- inductance (La).
With a little bit of examination it can be seen that the three stator windings will have mutual inductance, and that inductance will be characterized by the cosine of 120 . Since the physical angle between any pair of stator windings is the same,
1 Lab = Lac = Lbc = La−
2
There will also be a mutual inductance between the rotor and each phase of the stator. Using M to denote the magnitude of that inductance:
π ℓRNaNfM = µ0
4 gp2
Maf = M cos (pφ)
2π Mbf = M cos pφ −
3 2π
Mcf = M cos pφ + 3
We show in Chapter 1 of these notes that torque for this system is:
2π 2π T = −pM iaif sin (pφ) − pM ibif sin pφ − − pM icif sin pφ +
3 3
5 Balanced Operation:
Now, suppose the machine is operated in this fashion: the rotor turns at a constant velocity, the field current is held constant, and the three stator currents are sinusoids in time, with the same amplitude and with phases that differ by 120 degrees.
pφ = ωt + δi
if = If
ia = I cos (ωt) 2π
ib = I cos ωt − 3 2π
ic = I cos ωt + 3
Straightforward (but tedious) manipulation yields an expression for torque:
3 T = pM IIf sin δi−
2
5

Operated in this way, with balanced currents and with the mechanical speed consistent with the electrical frequency (pΩ = ω), the machine exhibits a constant torque. The phase angle δi is called the torque angle, but it is important to use some caution, as there is more than one torque angle.
Now, look at the machine from the electrical terminals. Flux linked by Phase A will be:
λa = Laia + Labib + Lacic + MIf cos pφ
Noting that the sum of phase currents is, under balanced conditions, zero and that the mutual phase-phase inductances are equal, this simplifies to:
λa = (La − Lab) ia + MIf cos pφ = Ldia + MIf cos pφ
where we use the notation Ld to denote synchronous inductance. Now, if the machine is turning at a speed consistent with the electrical frequency we say it is
operating synchronously, and it is possible to employ complex notation in the sinusoidal steady state. Then, note:
ia = I cos (ωt + θi) = Re Iejωt+θi
If , we can write an expression for the complex amplitude of flux as:
λa = Re Λaejωt
where we have used this complex notation:
I = Iejθi
If = Ifejθm
Now, if we look for terminal voltage of this system, it is:
va = dλa
= Re jωΛ ejωt
dt a
This system is described by the equivalent circuit shown in Figure 2.
-
+ E af
jXd
+ V -
I
Figure 2: Round Rotor Synchronous Machine Equivalent Circuit
where the internal voltage is: Eaf = jωMIfe
jθm
6

Now, if that is connected to a voltage source (i.e. if V is fixed), terminal current is:
V − Eafejδ
I = jXd
where Xd = ωLd is the synchronous reactance. Then real and reactive power (in phase A) are:
1 ∗P + jQ = V I
2
∗
1 V − Eafejδ
= V 2 jXd
1 |V 2 1 V Eafejδ
= |
2 −jXd
−2 −jXd
This makes real and reactive power:
1 V Eaf Pa = −
2 Xd sin δ
1 V 2 1 V Eaf Qa =
2 Xd −
2 Xd cos δ
If we consider all three phases, real power is
3 V Eaf P = −
2 Xd
sin δ
Now, at last we need to look at actual operation of these machines, which can serve either as motors or as generators.
Vector diagrams that describe operation as a motor and as a generator are shown in Figures 3 and 4, respectively.
Ia
V V
Eaf
jXdIa
δ Ia
Eaf
jXdIa
δ
Figure 3: Motor Operation, Over- and Under- Excited
Operation as a generator is not much different from operation as a motor, but it is common to make notations with the terminal current given the opposite (“generator”) sign.
7

Eaf
jXdIg
V Ig
V
Figure 4: Generator Operation, Over- and Under- Excited
6 Reconciliation of Models
We have determined that we can predict its power and/or torque characteristics from two points of view : first, by knowing currents in the rotor and stator we could derive an expression for torque vs. a power angle:
3 T =
2pMIIf sin δi−
From a circuit point of view, it is possible to derive an expression for power:
3 V Eaf P = sin δ−
2 Xd
and of course since power is torque times speed, this implies that:
3 V Eaf 3 pV Eaf T = sin δ = sin δ−
2 ΩXd
−2 ωXd
In this section of the notes we will, first of all, reconcile these notions, look a bit more at what they mean, and then generalize our simple theory to salient pole machines as an introduction to two-axis theory of electric machines.
6.1 Torque Angles:
Figure 5 shows a vector diagram that shows operation of a synchronous motor. It represents the MMF’s and fluxes from the rotor and stator in their respective positions in space during normal operation. Terminal flux is chosen to be ‘real’, or occupy the horizontal position. In motor operation the rotor lags by angle δ, so the rotor flux MIf is shown in that position. Stator current is also shown, and the torque angle between it and the rotor, δi is also shown. Now, note that the dotted line OA, drawn perpendicular to a line drawn between the stator flux LdI and terminal flux Λt, has length:
OA = LdI sin δi = Λt sin δ| |Then, noting that terminal voltage V = ωΛt, Ea = ωMIf and Xd = ωLd , straightforward
substitution yields:
jXdIg
Eaf
Ig
3 pV Eaf 3 sin δ = pMIIf sin δi
2 ωXd 2
8

7
Ld I
i
A
O t
fM I
Figure 5: Synchronous Machine Phasor Addition
So the current- and voltage- based pictures do give the same result for torque.
Per-Unit Systems:
Before going on, we should take a short detour to look into per-unit systems, a notational device that, in addition to being convenient, will sometimes be conceptually helpful. The basic notion is quite simple: for most variables we will note a base quantity and then, by dividing the variable by the base we have a per-unit version of that variable. Generally we will want to tie the base quantity to some aspect of normal operation. So, for example, we might make the base voltage and current correspond with machine rating. If that is the case, then power base becomes:
PB = 3VBIB
and we can define, in similar fashion, an impedance base:
VBZB =
IB
Now, a little caution is required here. We have defined voltage base as line-neutral and current base as line current (both RMS). That is not necessary. In a three phase system we could very well have defined base voltage to have been line-line and base current to be current in a delta connected element: √
3VB IB
VBΔ = IBΔ = √3
In that case the base power would be unchanged but base impedance would differ by a factor of three:
PB = VBΔIBΔ ZBΔ = 3ZB
However, if we were consistent with actual impedances (note that a delta connection of elements ofimpedance 3Z is equivalent to a wye connection of Z), the per-unit impedances of a given systemare not dependent on the particular connection. In fact one of the major advantages of using a
9

8
per-unit system is that per-unit values are uniquely determined, while ordinary variables can be line-line, line-neutral, RMS, peak, etc., for a large number of variations.
Perhaps unfortunate is the fact that base quantities are usually given as line-line voltage and base power. So that:
PB VB 1 VBΔ V 2
IB = ZB = = BΔ =√3VBΔ IB 3 IBΔ PB
Now, we will usually write per-unit variables as lower-case versions of the ordinary variables:
V P v = p = etc.
VB PB
Thus, written in per-unit notation, real and reactive power for a synchronous machine operating in steady state are:
2veaf v veaf p = −
xd
sin δ q = xd
− xd
cos δ
These are, of course, in motor reference coordinates, and represent real and reactive power into the terminals of the machine.
Normal Operation:
The synchronous machine is used, essentially interchangeably, as a motor and as a generator. Note that, as a motor, this type of machine produces torque only when it is running at synchronous speed. This is not, of course, a problem for a turbogenerator which is started by its prime mover (e.g. a steam turbine). Many synchronous motors are started as induction machines on their damper cages (sometimes called starting cages). And of course with power electronic drives the machine can often be considered to be “in synchronism” even down to zero speed.
As either a motor or as a generator, the synchronous machine can either produce or consume reactive power. In normal operation real power is dictated by the load (if a motor) or the prime mover (if a generator), and reactive power is determined by the real power and by field current.
Figure 6 shows one way of representing the capability of a synchronous machine. This picture represents operation as a generator, so the signs of p and q are reversed, but all of the other elements of operation are as we ordinarily would expect. If we plot p and q (calculated in the normal way) against each other, we see the construction at the right. If we start at a location q = −v2/xd, (and remember that normally v = 1 per-unit) , then the locus of p and q is what would be obtained by swinging a vector of length veaf/xd over an angle δ. This is called a capability chart because it is an easy way of visualizing what the synchronous machine (in this case generator) can do. There are three easily noted limits to capability. The upper limit is a circle (the one traced out by that vector) which is referred to as field capability. The second limit is a circle that describes constant p + jq . This is, of course, related to the magnitude of armature current and so this limit is called | |armature capability. The final limit is related to machine stability, since the torque angle cannot go beyond 90 degrees. In actuality there are often other limits that can be represented on this type of a chart. For example, large synchronous generators typically have a problem with heating of the stator iron when they attempt to operate in highly underexcited conditions (q strongly negative), so that one will often see another limit that prevents the operation of the machine near its stability
10

9
Q
dX
1
P
Field Limit
Stator
Limit
Stability Limit
Figure 6: Synchronous Generator Capability Diagram
limit. In very large machines with more than one cooling state (e.g. different values of cooling hydrogen pressure) there may be multiple curves for some or all of the limits.
Another way of describing the limitations of a synchronous machine is embodied in the Vee
Curve. An example is shown in Figure 7 . This is a cross-plot of magnitude of armature current with field current. Note that the field and armature current limits are straightforward (and are the right-hand and upper boundaries, respectively, of the chart). The machine stability limit is what terminates each of the curves at the upper left-hand edge. Note that each curve has a minimum at unity power factor. In fact, there is yet another cross-plot possible, called a compounding curve, in which field current is plotted against real power for fixed power factor.
Salient Pole Machines: Two-Reaction Theory
So far, we have been describing what are referred to as “round rotor” machines, in which stator reactance is not dependent on rotor position. This is a pretty good approximation for large turbine generators and many smaller two-pole machines, but it is not a good approximation for many synchronous motors nor for slower speed generators. For many such applications it is more cost effective to wind the field conductors around steel bodies (called poles) which are then fastened onto the rotor body, with bolts or dovetail joints. These produce magnetic anisotropies into the machine which affect its operation. The theory which follows is an introduction to two-reaction theory and consequently for the rotating field transformations that form the basis for most modern dynamic analyses.
Figure 8 shows a very schematic picture of the salient pole machine, intended primarily to show how to frame this analysis. As with the round rotor machine the stator winding is located in slots in the surface of a highly permeable stator core annulus. The field winding is wound around steel pole pieces. We separate the stator current sheet into two components: one aligned with and one in quadrature to the field. Remember that these two current components are themselves (linear) combinations of the stator phase currents. The transformation between phase currents and the d
11

6
Per
-Un
it Ia
Vee Curves
1.2
1
0.8
0.6
0.4
0.2
0
0 0.5 1 1.5 2 2.5 3
Per-Unit Field Current
Per-Unit Real Power: 0.00 0.32 0.64 0.96
Figure 7: Synchronous Machine Vee Curve
and q- axis components is straightforward and will appear in Chapter 8 of these notes. The key here is to separate MMF and flux into two orthogonal components and to pretend that
each can be treated as sinusoidal. The two components are aligned with the direct axis and with the quadrature axis of the machine. The direct axis is aligned with the field winding, while the quadrature axis leads the direct by 90 degrees. Then, if φ is the angle between the direct axis and the axis of phase a, we can write for flux linking phase a:
λs = λd cos φ − λq sin φ
Then, in steady state operation, if Va = dλa and φ = ωt + δ ,dt
Va = −ωλs sin φ − ωλq cos φ
which allows us to define:
Vd = −ωλq
Vq = ωλd
one might think of the ‘voltage’ vector as leading the ‘flux’ vector by 90 degrees. Now, if the machine is linear, those fluxes are given by:
λd = LdId + MIf
λq = LqIq
Note that, in general, Ld = Lq. In wound-field synchronous machines, usually Ld > Lq. The reverse is true for most salient (buried magnet) permanent magnet machines.
12

d axis
If
Id
Iq
q axis
Figure 8: Cartoon of a Salient Pole Synchronous Machine
Vq V
V d
Figure 9: Resolution of Terminal Voltage
Referring to Figure 9, one can resolve terminal voltage into these components:
Vd = V sin δ
Vq = V cos δ
or:
Vd = −ωλq = −ωLqIq = V sin δ
Vq = ωλd = ωLdId + ωMIf = V cos δ
which is easily inverted to produce:
Id = V cos δ − Eaf
Xd
V sin δ Iq = −
Xq
13

where Xd = ωLd Xq = ωLq Eaf = ωMIf
Now, we are working in ordinary variables (this discussion should help motivate the use of per-unit!), and each of these variables is peak amplitude. Then, if we take up a complex frame of reference:
V = Vd + jVq
I = Id + jIq
complex power is:
P + jQ = 3
2 V I∗ =
3
2 (VdId + VqIq) + j (VqId − VdIq)
or:
P = − 3
2
V Eaf
Xd sin δ +
V 2
2
1
Xq − 1
Xd sin 2δ
Q = 3
2
V 2
2
1
Xd
+ 1
Xq − V 2
2
1
Xq − 1
Xd
cos 2δ − V Eaf
Xd
cos δ
q
d d
δ
ψ
E 1
E af
j X I
V I
I d
I q
d axix
q axis
j X I
j X I
q q
Figure 10: Phasor Diagram: Salient Pole Machine
A phasor diagram for a salient pole machine is shown in Figure 10. This is a little different from the equivalent picture for a round-rotor machine, in that stator current has been separated into its d- and q- axis components, and the voltage drops associated with those components have been drawn separately. It is interesting and helpful to recognize that the internal voltage Eaf can be expressed as:
Eaf = E1 + (Xd −Xq) Id
14

where the voltage E1 is on the quadrature axis. In fact, E1 would be the internal voltage of a round rotor machine with reactance Xq and the same stator current and terminal voltage. Then the operating point is found fairly easily:
δ = − tan −1 XqI cos ψ V + XqI sin ψ
E1 = (V + XqI sin ψ)2 + (XqI cos ψ)2
Power-Angle Curves
-1.5
-1
-0.5
0
0.5
1
1.5
-4 -3 -2 -1 0 1 2 3 4
Torque Angle
Per
-Un
it Round Rotor
Salient Rotor
xd=2.2
xq = 1.6
Figure 11: Torque-Angle Curves: Round Rotor and Salient Pole Machines
A comparison of torque-angle curves for a pair of machines, one with a round, one with a salient rotor is shown in Figure 11 . It is not too difficult to see why power systems analysts often neglect saliency in doing things like transient stability calculations.
10 Relating Rating to Size
It is possible, even with the simple model we have developed so far, to establish a quantitative relationship between machine size and rating, depending (of course) on elements such as useful flux and surface current density. To start, note that the rating of a machine (motor or generator) is:
P + jQ = qV I | |where q is the number of phases, V is the RMS voltage in each phase and I is the RMS current. To establish machine rating we must establish voltage and current, and we do these separately.
15

10.1 Voltage
Assume that our sinusoidal approximation for turns density is valid:
Na na(θ) = cos pθ
2R
And suppose that working flux density is:
Br(θ) = B0 sin p(θ − φ)
Now, to compute flux linked by the winding (and consequently to compute voltage), we first compute flux linked by an incremental coil:
θ+ πp
′ ′ λi(θ) = ℓBr(θ )Rdθ θ
Then flux linked by the whole coil is:
p
−
π 2
π 2p
λi(θ)na(θ)Rdθ =λa = pπ 2ℓRNa
4 pB0 cos pφ
This is instantaneous flux linked when the rotor is at angle φ. If the machine is operating at some electrical frequency ω with a phase angle so that pφ = ωt + δ, the RMS magnitude of terminal voltage is:
ω π B0Va = 2ℓRNa
p 4 √
2
Finally, note that the useful peak current density that can be used is limited by the fraction of machine periphery used for slots:
B0 = Bs (1 − λs)
where Bs is the flux density in the teeth, limited by saturation of the magnetic material.
10.2 Current
The (RMS) magnitude of the current sheet produced by a current of (RMS) magnitude I is:
q NaI Kz =
2 2R
And then the current is, in terms of the current sheet magnitude:
2 I = 2RKz
qNa
Note that the surface current density is, in terms of area current density Js, slot space factor λs
and slot depth hs: Kz = λsJshs
This gives terminal current in terms of dimensions and useful current density:
4RI = λshsJs
qNa
16

10.3 Rating
Assembling these expressions, machine rating becomes:
ω Bs |P + jQ| = qV I = p
2πR2ℓ√2 λs (1 − λs)hsJs
This expression is actually fairly easily interpreted. The product of slot factor times one minus slot factor optimizes rather quickly to 1/4 (when λs = 1). We could interpret this as:
∗P = jQ = Asusτ| |
where the interaction area is: As = 2πRℓ
The surface velocity of interaction is:
ω us = R = ΩR
p
and the fragment of expression which “looks like” traction is:
∗ Bs
τ = hsJs λs (1 − λs)√2
Note that this is not quite traction since the current and magnetic flux may not be ideally aligned, and this is why the expression incorporates reactive as well as real power.
This is not quite yet the whole story. The limit on Bs is easily understood to be caused by saturation of magnetic material. The other important element on shear stress density, hsJs is a little more involved.
10.4 Role of Reactance
The per-unit, or normalized synchronous reactance is:
I µ0R λs √
2 hsJs
xd = Xd = V pg 1 − λs Bs
While this may be somewhat interesting by itself, it becomes useful if we solve it for hsJa:
p(1 − λs)BshsJa = xdg
µ0Rλs
√2
That is, if xd is fixed, hsJa (and so power) are directly related to air-gap g. Now, to get a limit on g, we must answer the question of how far the field winding can “throw” effective air-gap flux? To understand this question, we must calculate the field current to produce rated voltage, no-load, and then the excess of field current required to accommodate load current.
Under rated operation, per- unit field voltage is:
2 2 eaf = v + (xdi)2 + 2xdi sin ψ
Or, if at rated conditions v and i are both unity (one per- unit), then
2eaf = 1 + xd + 2xd sin ψ
17

10.5 Field Winding
Thus, given a value for xd and ψ, per- unit internal voltage eaf is also fixed. Then field current required can be calculated by first estimating field winding current for “no-load operation”.
µ0NfIfnl Br =
2gp
and rated field current is: If = Ifnleaf
or, required rated field current is:
NfIf =2gp(1 − λs)Bs
eaf µ0
Next, If can be related to a field current density:
NRS NfIf = ARSJf
2
where NRS is the number of rotor slots and the rotor slot area ARS is
ARS = wRhR
where hR is rotor slot height and wR is rotor slot width:
2πR wR = λR
NRS
Then: NfIf = πRλRhRJf
Now we have a value for air- gap g:
π µ0RλRhRJf g =
2 p(1 − λs)Bseaf
This then gives us useful armature surface current density:
π xd λRhsJs = hRJf
2√
2 eaf λs
We will not have a lot more to say about this. Note that the ratio of xd/eaf can be quite small (if the per-unit reactance is small), will never be a very large number for any practical machine, and is generally less than one. As a practical matter it is unusual for the per-unit synchronous reatance of a machine to be larger than about 2 or 2.25 per-unit. What this tells us should be obvious: either the rotor or the stator of a machine can produce the dominant limitation on shear stress density (and so on rating). The best designs are “balanced”, with both limits being reached at the same time.
18

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machinery
Class Notes 5: Winding Inductances September 5, 2005 c©2005 James L. Kirtley Jr.
1 Introduction
The purpose of this document is to show how the inductances of windings in round- rotor machines with narrow air gaps may be calculated. We deal only with the idealized air- gap magnetic fields, and do not consider slot, end winding, peripheral or skew reactances. We do, however, consider the space harmonics of winding magneto-motive force (MMF).
2 Description of Stators
Back Iron
Slots
Teeth
Slot Depression
Figure 1: Stator Cross-Section
Figure 1 shows a cartoon view of an axial cross-section of a twelve-slot stator. Actually, what is shown is the shape of a thin sheet of steel, or lamination that is used to make up the magnetic circuit. The iron is made of thin sheets to control eddy current losses. Thickness varies according to freuqency of operation, but in machines for 60 Hz (the vast bulk of machines made for industrial
1

use), lamination thickness is typically .014” (.355 mm). These are stacked to make the magnetic circuit of the appropriate length. Windings are carried in the slots of this structure.
Figure 1 shows trapezoidal slots with teeth of approximately uniform cross-section over most of their length but wider extent near the air-gap. The tooth ends, in combination with the relatively narrow slot depression region, help control certain parasitic losses in the rotor of many machines by improving uniformity of the air-gap fields, increase the air-gap permeance and help hold the windings in the slots. It should be noted that large machines, with what are called “form wound” coils, have straight-sided rectangular slots and consequently teeth of non-uniform cross-section. The description that follows will hold for both types of machine.
1 2 3 4 5 6 7 8 9 10 11 12
A A A’ A’B B B’ B’C’ C’ C C
Figure 2: Full-Pitched Winding
To simplify the discussion, imagine the slot/tooth region to be “straightened out” as shown in Figure 2. This shows a three-phase, two-pole winding in the twelve slots. Such a winding would have two slots per pole per phase. One of the two coils of phase A would be wound in slots 1 and 7 (six slots apart).
1 2 3 4 5 6 7 8 9 10 11 12
A A C’ C’ B B A’ A’ C C B’ B’
A C’ C’ B B A’ A’ C C B’ B’ A
Figure 3: Five-Sixths-Pitched Winding
Machines are seldom wound as shown in Figure 2 for a variety of reasons. It is usually advantageous in reducing the length of the end turns and to reducing space harmonic effects in the machine (usually bad effects!) to wind the machine with “short-pitched” windings as shown in Figure 3. Each phase in this case consists of four coils (two per slot). The four coils of Phase A would span between slots 1 and 6, slots 2 and 7, slots 7 and 12 and slots 8 and 1. Each of these coil spans is five slots, so this choice of winding pattern is referred to as “Five-Sixths” pitch.
So this cartoon-figure machine stator (which could represent either a synchronous or induction motor or generator) has both breadth because there are more than one slots per pole per phase, and it may have the need for accounting for winding pitch. What follows in this note is a simple protocol for estimating the important air-gap fields and inductances.
2

3 Winding MMF
To start, consider the MMF of a full- pitch, concentrated winding as shown in schematic form in Figure 4. Assuming that the winding has a total of N turns over p pole- pairs, and is carrying current I the MMF is:
∞ 4 NI
F = − n = 1
nπ 2p sin npθ (1)
nodd
This distribution is shown, as a function of angle θ in Figure 5. This leads directly to magnetic flux density in the air- gap:
∞ µ0 4 NI
Br = − sin npθ (2) g nπ 2p
n = 1 nodd
Note that a real winding, which will most likely not be full- pitched and concentrated, will have a winding factor which is the product of pitch and breadth factors, to be discussed later.
µ
µ NI p
Rg
Magnetic Circuit:
Stator Rotor
Air-Gap
r z
θ
Figure 4: Primitive Geometry Problem
Now, suppose that there is a polyphase winding, consisting of more than one phase (we will use three phases), driven with one of two types of current. The first of these is balanced, current:
Ia = I cos(ωt)
2π Ib = I cos(ωt −
3 )
2π Ic = I cos(ωt +
3 ) (3)
Conversely, we might consider Zero Sequence currents:
Ia = Ib = Ic = I cos ωt (4)
3

π 2 p
π p
π3 2 p
π p 2
F( )
θ
θ
NI p
Figure 5: Air-Gap MMF
Then it is possible to express magnetic flux density for the two distinct cases. For the balanced
case: ∞
Br = Brn sin(npθ ∓ ωt) (5) n=1
where
• The upper sign holds for n = 1, 7, ...
• The lower sign holds for n = 5, 11, ...
• all other terms are zero
and 3 µ0 4 NI
Brn = (6) 2 g nπ 2p
The zero- sequence case is simpler: it is nonzero only for the triplen harmonics:
∞ µ0 4 NI 3
Br = (sin(npθ − ωt) + sin(npθ + ωt)) (7) g nπ 2p 2
n=3,9,...
Next, consider the flux from a winding on the rotor: that will have the same form as the flux produced by a single armature winding, but will be referred to the rotor position:
∞ µ0 4 NI
′ Brf = sin npθ (8) g nπ 2p
n = 1 nodd
′which is, substituting θ = θ − ωt ,p
∞ µ0 4 NI
Brf = sin n(pθ − ωt) (9) g nπ 2p
n = 1 nodd
The next step here is to find the flux linked if we have some air- gap flux density of the form:
∞
Br = Brn sin(npθ ± ωt) (10) n=1
4

Now, it is possible to calculate flux linked by a single-turn, full-pitched winding by:
πp
Φ = BrRldθ (11) 0
and, using (10), this is: ∞ Brn
Φ = 2Rl cos(ωt) (12) np
n=1
This allows us to compute self- and mutual- inductances, since winding flux is:
λ = NΦ (13)
The end of this is a set of expressions for various inductances. It should be noted that, in the real world, most windings are not full-pitched nor concentrated. Fortunately, these shortcomings can be accommodated by the use of winding factors.
The simplest and perhaps best definition of a winding factor is the ratio of flux linked by an actual winding to flux that would have been linked by a full- pitch, concentrated winding with the same number of turns. That is:
λactual kw = (14)
λfull−pitch
It is relatively easy to show, using reciprocity arguments, that the winding factors are also the ratio of effective MMF produced by an actual winding to the MMF that would have been produced by the same winding were it to be full- pitched and concentrated. The argument goes as follows: mutual inductance between any pair of windings is reciprocal. That is, if the windings are designated one and two, the mutual inductance is flux induced in winding one by current in winding two, and it is also flux induced in winding two by current in winding one. Since each winding has a winding factor that influences its linking flux, and since the mutual inductance must be reciprocal, the same winding factor must influence the MMF produced by the winding.
The winding factors are often expressed for each space harmonic, although sometimes when a winding factor is referred to without reference to a harmonic number, what is meant is the space factor for the space fundamental.
Two winding factors are commonly specified for ordinary, regular windings. These are usually called pitch and breadth factors, reflecting the fact that often windings are not full pitched, which means that individual turns do not span a full π electrical radians and that the windings occupy a range or breadth of slots within a phase belt. The breadth factors are ratios of flux linked by a given winding to the flux that would be linked by that winding were it full- pitched and concentrated. These two winding factors are discussed in a little more detail below. What is interesting to note, although we do not prove it here, is that the winding factor of any given winding is the product of the pitch and breadth factors:
kw = kpkb (15)
With winding factors as defined by (14) and the sections below, it is possible to define winding inductances. For example, the synchronous inductance of a winding will be the apparent inductance of one phase when the polyphase winding is driven by a balanced set of currents as in (3). This is, approximately:
∞ 3 4 µ0N
2Rlk2
Ld = 2
wn (16) 2 π p gn2
n=1,5,7,...
5

This expression is approximate because it ignores the asynchronous interactions between higher order harmonics and the rotor of the machine. These are beyond the scope of this note.
Zero- sequence inductance is the ratio of flux to current if a winding is excited by zero sequence currents, as in (4):
∞ 4 µ0N
2Rlk2
L0 = 3 2
wn (17) π p gn2
n=3,9,...
And then mutual inductance, as between a field winding (f) and an armature winding (a), is: ∞ 4 µ0NfNakfnkanRl
M(φ) = 2
cos(npφ) (18) π p2gn
n = 1 nodd
4 Winding Factors
Now we turn our attention to computing the winding factors for simple, regular winding patterns. We do not prove but only state that the winding factor can, for regular winding patterns, be expressed as the product of a pitch factor and a breadth factor, each of which can be estimated separately.
4.1 Pitch Factor
r z
θ
α
Figure 6: Short-Pitched Coils
Pitch factor is found by considering the flux linked by a less- than- full pitched winding. Consider the situation in which radial magnetic flux density is:
Br = Bn sin(npθ − ωt) (19)
A winding with pitch α will link flux (see Figure 6: α 2
+ p
λ = Nl α 2
π 2
π 2
p
− p p
Bn sin(npθ − ωt)Rdθ (20)
6

Pitch α refers to the angular displacement between sides of the coil, expressed in electrical radians. For a full- pitch coil α = π.
The flux linked is: 2NlRBn nπ nα
λ = sin( ) sin( ) (21) np 2 2
Using the definition (14), the pitch factor is seen to be:
nα kpn = sin (22)
2
4.2 Breadth Factor
Now for breadth factor. This describes the fact that a winding may consist of a number of coils, each linking flux slightly out of phase with the others. A regular winding will have a number (say m) coil elements, separated by electrical angle γ. (See Figure 7
r z
θ γ
Figure 7: Distributed Coils
A full- pitch coil with one side at angle ξ will, in the presence of magnetic flux density as described by (19), link flux:
λ = Nl
This is readily evaluated to be:
πp
ξ
p
− ξ
p
Bn sin(npθ − ωt)Rdθ (23)
2NlRBn Re ej(ωt−nξ) (24) λ =
np
where in (24), complex number notation has been used for convenience in carrying out the rest of this derivation.
What happens here is that the coils link fluxes that differ in phase, so the addition of flux is as shown in vector form in Figure 8.
7

Individual Total FluxFlux Linkages Linkage
Figure 8: Vector Flux Addition
Now: if the winding is distributed into m sets of slots and the slots are evenly spaced, the angular position of each slot will be:
m − 1 ξi = iγ − γ (25)
2
and the number of turns in each slot will be N , so that actual flux linked will be: mp
m−1 2NlRBn 1
Re ej(ωt−nξi) (26) λ = np m
i=0
The breadth factor is then simply:
m−1
kb =1
e −jn(iγ− m−1 γ)
2 (27) m
i=0
Note that (27) can be written as:
jnγ m−1 m 2 e
kb = e −jniγ (28) m
i=0
Now, focus on that sum. We know that any coverging geometric sum has a simple sum:
∞ 1i x = (29)
1 − x i=0
and that a truncated sum is: m−1 ∞ ∞
= − (30) i=0 i=0 i=m
Then the sum in (28) can be written as:
m−1
i=0
e −jniγ =
1 − ejnmγ
∞
i=0
e −jniγ = 1 − ejnmγ
1 − e−jnγ (31)
Now, inserting the results of (31) into (28), and using the definitions for sine, the breadth factor is found:
sin nmγ
kbn = m sin
2 nγ (32) 2
8

4.3 Alternate Derivation of Breadth Factor
Most textbooks, if they bother to prove the Breadth Factor, use a geometric proof as shown in Figure 9.
2 γ
γm 2
O
AB
C
Figure 9: Alternate Proof of Breadth Factor
The short vectors (e.g. AC) represent the voltages induced in individual coils. In fact, what is shown in this figure is the same as is shown in Figure 8, but spread out to show the actual addition. Now, note that if each of the vectors is bisected by a line segment at right angles, all of those
γ 2
line segments meet at point O. The line segment that includes OB is one of these. Line segments that run from O to the ends of the vectors will have an angle from the bisectors of the vectors.
mγ Similarly, the line segment OA has an angle of 2 with respect to the bisector of the resultant voltage vector.
Now, if we note F1 as the length of each of the individual coil voltage vectors and F as the length of the resultant sum, the length of half of the bisector is:
F mγ AB =
2 = OA sin
2 (33)
but then 1 1 γ
2 AC =
2 F1 = OA sin
2 (34)
Then the resultant vector is:
F = 2AB = mF1 sin m γ
2
m γ 2sin
(35)
9

Massachusetts Institute of TechnologyDepartment of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 6: DC (Commutator) and Permanent Magnet Machines
September 5, 2005c©2005 James L. Kirtley Jr.
1 Introduction
Virtually all electric machines, and all practical electric machines employ some form of rotatingor alternating field/current system to produce torque. While it is possible to produce a “trueDC” machine (e.g. the “Faraday Disk”), for practical reasons such machines have not reachedapplication and are not likely to. In the machines we have examined so far the machine is operatedfrom an alternating voltage source. Indeed, this is one of the principal reasons for employing ACin power systems.
The first electric machines employed a mechanical switch, in the form of a carbon brush/commutatorsystem, to produce this rotating field. While the widespread use of power electronics is making“brushless” motors (which are really just synchronous machines) more popular and common, com-mutator machines are still economically very important. They are relatively cheap, particularly insmall sizes, and they tend to be rugged and simple.
You will find commutator machines in a very wide range of applications. The starting motoron all automobiles is a series-connected commutator machine. Many of the other electric motors inautomobiles, from the little motors that drive the outside rear-view mirrors to the motors that drivethe windshield wipers are permanent magnet commutator machines. The large traction motorsthat drive subway trains and diesel/electric locomotives are DC commutator machines (althoughinduction machines are making some inroads here). And many common appliances use “universal”motors: series connected commutator motors adapted to AC.
1.1 Geometry:
Stator YokeField Poles
Field Winding
Armature Winding
Rotor Ω
Figure 1: Wound-Field DC Machine Geometry
1

~
A schematic picture (“cartoon”) of a commutator type machine is shown in 1. The armature of this machine is on the rotor (this is the part that handles the electric power), and current is fed to the armature through the brush/commutator system. The interaction magnetic field is provided (in this picture) by a field winding. A permanent magnet field is applicable here, and we will have quite a lot more to say about such arrangements below.
Now, if we assume that the interaction magnetic flux density averages Br, and if there are Ca
conductors underneath the poles at any one time, and if there are m parallel paths, then we may estimate torque produced by the machine by:
CaTe = RℓBrIa
m
where R and ℓ are rotor radius and length, respectively and Ia is terminal current. Note that Ca
is not necessarily the total number of conductors, but rather the total number of active conductors (that is, conductors underneath the pole and therefore subject to the interaction field). Now, if we note Nf as the number of field turns per pole, the interaction field is just:
Nf IfBr = µ0
g
leading to a simple expression for torque in terms of the two currents:
Te = GIaIf
where G is now the motor coefficient (units of N-m/ampere squared):
Ca NfG = µ0 Rℓ
m g
Now, let’s go back and look at this from the point of view of voltage. Start with Faraday’s Law:
∂ ~∇× ~ B E = −
∂t
Integrating both sides and noting that the area integral of a curl is the edge integral of the quantity, we find:
∂ ~B E · dℓ = −
∂t Now, that is a bit awkward to use, particularly in the case we have here in which the edge of
the contour is moving (note we will be using this expression to find voltage). We can make this a bit more convenient to use if we note:
d
∂ ~
B~ B · d~B · ~n da = · ~n da + ~v × ~ ℓ dt ∂t
where ~v is the velocity of the contour. This gives us a convenient way of noting the apparent electric field within a moving object (as in the conductors in a DC machine):
E = E + ~v × ~~ ′ ~ B
Now, note that the armature conductors are moving through the magnetic field produced by the stator (field) poles, and we can ascribe to them an axially directed electric field:
Ez = −RΩBr
2

H v
H B
H dl
Figure 2: Motion of a contour through a magnetic field produces flux change and electric field in the moving contour
If the armature conductors are arranged as described above, with Ca conductors in m parallel paths underneath the poles and with a mean active radial magnetic field of Br, we can compute a voltage induced in the stator conductors:
CaEb = RΩBr
m
Note that this is only the voltage induced by motion of the armature conductors through the field and does not include brush or conductor resistance. If we include the expression for effective magnetic field, we find that the back voltage is:
Eb = GΩIf
which leads us to the conclusion that newton-meters per ampere squared equals volt seconds per ampere. This stands to reason if we examine electric power into the interaction and mechanical power out:
Pem = EbIa = TeΩ
Now, a more complete model of this machine would include the effects of armature, brush and lead resistance, so that in steady state operation:
Va = RaIa + GΩIf
Now, consider this machine with its armatucre connected to a voltage source and its field operating at steady current, so that:
Va − GΩIfIa =
Ra
Then torque, electric power in and mechanical power out are:
Va − GΩIfTe = GIf
Ra
Va − GΩIfPe = Va
Ra
Va − GΩIfPm = GΩIf
Ra
Now, note that these expressions define three regimes defined by rotational speed. The two “break points” are at zero speed and at the “zero torque” speed:
VaΩ0 =
GIf
3

Ra
+ +
Va GΩI f
-
Figure 3: DC Machine Equivalent Circuit
ical
El ical
Mechan
ectr
Figure 4: DC Machine Operating Regimes
For 0 < Ω < Ω0, the machine is a motor: electric power in and mechanical power out are both positive. For higher speeds: Ω0 < Ω , the machine is a generator, with electrical power in and mechanical power out being both negative. For speeds less than zero, electrical power in is positive and mechanical power out is negative. There are few needs to operate machines in this regime, short of some types of “plugging” or emergency braking in tractions systems.
1.2 Hookups:
We have just described a mode of operation of a commutator machine usually called “separately excited”, in which field and armature circuits are controlled separately. This mode of operation is used in some types of traction applications in which the flexibility it affords is useful. For example, some traction applications apply voltage control in the form of “choppers” to separately excited machines.
Note that the “zero torque speed” is dependent on armature voltage and on field current. For high torque at low speed one would operate the machine with high field current and enough armature voltage to produce the requisite current. As speed increases so does back voltage, and field current may need to be reduced. At any steady operating speed there will be some optimum mix of field and armature currents to produced the required torque. For braking one could (and this is often done) re-connect the armature of the machine to a braking resistor and turn the machine into a generator. Braking torque is controlled by field current.
A subset of the separately excited machine is the shunt connection in which armature and field are supplied by the same source, in parallel. This connection is not widely used any more: it does
4

G I fΩ
Ra
+
-
Figure 5: Two-Chopper, separately excited machine hookup
+ V
Figure 6: Series Connection
not yield any meaningful ability to control speed and the simple applications to which it used to be used are handled by induction machines.
Another connection which is still widely used is the series connection, in which the field winding is sized so that its normal operating current level is the same as normal armature current and the two windings are connected in series. Then:
V Ia = If =
Ra + Rf + GΩ
And then torque is: GV 2
Te = (Ra + Rf + GΩ)2
It is important to note that this machine has no “zero-torque” speed, leading to the possibility that an unloaded machine might accelerate to dangerous speeds. This is particularly true because the commutator, made of pieces of relatively heavy material tied together with non-conductors, is not very strong.
Speed control of series connected machines can be achieved with voltage control and many appliances using this type of machine use choppers or phase control. An older form of control used in traction applications was the series dropping resistor: obviously not a very efficient way of controlling the machine and not widely used (except in old equipment, of course).
5

A variation on this class of machine is the very widely used “universal motor”, in which the statorand rotor (field and armature) of the machine are both constructed to operate with alternatingcurrent. This means that both the field and armature are made of laminated steel. Note that sucha machine will operate just as it would have with direct current, with the only addition being thereactive impedance of the two windings. Working with RMS quantities:
I =V
Ra +Rf +GΩ + jω (La + Lf )
Te =G|V |2
(Ra +Rf +GΩ)2 + (ωLa + ωLf )2
where ω is the electrical supply frequency. Note that, unlike other AC machines, the universalmotor is not limited in speed to the supply frequency. Appliance motors typically turn substantiallyfaster than the 3,600 RPM limit of AC motors, and this is one reason why they are so widely used:with the high rotational speeds it is possible to produce more power per unit mass (and more powerper dollar).
1.3 Commutator:
The commutator is what makes this machine work. The brush and commutator system of thisclass of motor involves quite a lot of “black art”, and there are still aspects of how they workwhich are poorly understood. However, we can make some attempt to show a bit of what thebrush/commutator system does.
To start, take a look at the picture shown in Figure 7. Represented are a pair of poles (shaded)and a pair of brushes. Conductors make a group of closed paths. Current from one of the brushestakes two parallel paths. You can follow one of those paths around a closed loop, under each ofthe two poles (remember that the poles are of opposite polarity) to the opposite brush. Opencommutator segments (most of them) do not carry current into or out of the machine.
Figure 7: Commutator and Current Paths
A commutation interval occurs when the current in one coil must be reversed. (See Figure 8In the simplest form this involves a brush bridging between two commutator segments, shortingout that coil. The resistance of the brush causes the current to decay. When the brush leaves theleading segment the current in the leading coil must reverse.
We will not attempt to fully understand the commutation process in this type of machine, butwe can note a few things. Resistive commutation is the process relied upon in small machines.
6

Figure 8: Commutator at Commutation
When the current in one coil must be reversed (because it has left one pole and is approaching theother), that coil is shorted by one of the brushes. The brush resistance causes the current in thecoil to decay. Then the leading commutator segment leaves the brush the current MUST reverse(the trailing coil has current in it), and there is often sparking.
1.4 Commutation
CommutationInterpoles
Stator YokeField Poles
Field Winding
Armature Winding
Rotor Ω
Figure 9: Commutation Interpoles
In larger machines the commutation process would involve too much sparking, which causesbrush wear, noxious gases (ozone) that promote corrosion, etc. In these cases it is common to useseparate commutation interpoles. These are separate, usually narrow or seemingly vestigal polepieces which carry armature current. They are arranged in such a way that the flux from theinterpole drives current in the commutated coil in the proper direction. Remember that the coilbeing commutated is located physically between the active poles and the interpole is therefore in theright spot to influence commutation. The interpole is wound with armature current (it is in serieswith the main brushes). It is easy to see that the interpole must have a flux density proportionalto the current to be commutated. Since the speed with which the coil must be commutated isproportional to rotational velocity and so is the voltage induced by the interpole, if the right
7

2
number of turns are put around the interpole, commutation can be made to be quite accurate.
Commutation
Pole−Face Compensation Winding
Field Poles
Field Winding
Armature Winding
Rotor Ω
1.5 Compensation:
Interpoles
Figure 10: Pole Face Compensation Winding
The analysis of commutator machines often ignores armature reaction flux. Obviously these machines DO produce armature reaction flux, in quadrature with the main field. Normally, commutator machines are highly salient and the quadrature inductance is lower than direct-axis inductance, but there is still flux produced. This adds to the flux density on one side of the main poles (possibly leading to saturation). To make the flux distribution more uniform and therefore to avoid this saturation effect of quadrature axis flux, it is common in very highly rated machines to wind compensation coils: essentially mirror-images of the armature coils, but this time wound in slots in the surface of the field poles. Such coils will have the same number of ampere-turns as the armature. Normally they have the same number of turns and are connected directly in series with the armature brushes. What they do is to almost exactly cancel the flux produced by the armature coils, leaving only the main flux produced by the field winding. One might think of these coils as providing a reaction torque, produced in exactly the same way as main torque is produced by the armature. A cartoon view of this is shown in Figure 10.
Permanent Magnets in Electric Machines
Of all changes in materials technology over the last several years, advances in permanent magnets have had the largest impact on electric machines. Permanent magnets are often suitable as replacements for the field windings in machines: that is they can produce the fundamental interaction field. This does three things. First, since the permanent magnet is lossless it eliminates the energy required for excitation, usually improving the efficiency of the machine. Second, since eliminating the excitation loss reduces the heat load it is often possible to make PM machines more compact. Finally, and less appreciated, is the fact that modern permanent magnets have very large coercive
8

force densities which permit vastly larger air gaps than conventional field windings, and this in turn permits design flexibility which can result in even better electric machines.
These advantages come not without cost. Permanent magnet materials have special characteristics which must be taken into account in machine design. The highest performance permanent magnets are brittle ceramics, some have chemical sensitivities, all are sensitive to high temperatures, most have sensitivity to demagnetizing fields, and proper machine design requires understanding the materials well. These notes will not make you into seasoned permanent magnet machine designers. They are, however, an attempt to get started, to develop some of the mathematical skills required and to point to some of the important issues involved.
2.1 Permanent Magnets:
0
1
0Tes
la
Hysteresis Loop: Perm anent Magn et
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
-400 -300 -200 -100 100 200 300 400
Kilo Am per es /Meter
Figure 11: Hysteresis Loop Of Ceramic Permanent Magnet
Permanent magnet materials are, at core, just materials with very wide hysteresis loops. Figure 11 is an example of something close to one of the more popular ceramic magnet materials. Note that this hysteresis loop is so wide that you can see the effect of the permeability of free space.
It is usual to display only part of the magnetic characteristic of permanent magnet materials (see Figure 12), the third quadrant of this picture, because that is where the material is normally operated. Note a few important characteristics of what is called the “demagnetization curve”. The remanent flux density Br, is the value of flux density in the material with zero magnetic field H. The coercive field Hc is the magnetic field at which the flux density falls to zero. Shown also on the curve are loci of constant energy product. This quantity is unfortunately named, for although it has the same units as energy it represents real energy in only a fairly general sense. It is the product of flux density and field intensity. As you already know, there are three commonly used systems of units for magnetic field quantities, and these systems are often mixed up to form very confusing units. We will try to stay away from the English system of units in which field intensity H is measured in amperes per inch and flux density B in lines (actually, usually kilolines) per square inch. In CGS units flux density is measured in Gauss (or kilogauss) and magnetic field intensity in Oersteds. And in SI the unit of flux density is the Tesla, which is one Weber per square
meter, and the unit of field intensity is the Ampere per meter. Of these, only the last one, A/m is obvious. A Weber is a volt-second. A Gauss is 10−4 Tesla. And, finally, an Oersted is that field
9

Demagnetization Curve
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
-250 -200 -150 -100 -50 0
H, kA/m
B, T
esla
BrEnergy Product Loci
Hc
Figure 12: Demagnetization Curve
intensity required to produce one Gauss in the permeability of free space. Since the permeabilityof free space µ0 = 4π × 10−7Hy/m, this means that one Oe is about 79.58 A/m. Commonly, theenergy product is cited in MgOe (Mega-Gauss-Oersted)s. One MgOe is equal to 7.958kJ/m3. Acommonly used measure for the performance of a permanent magnet material is the maximumenergy product, the largest value of this product along the demagnetization curve.
To start to understand how these materials might be useful, consider the situation shown inFigure 13: A piece of permanent magnet material is wrapped in a magnetic circuit with effectivelyinfinite permeability. Assume the thing has some (finite) depth in the direction you can’t see. Now,if we take Ampere’s law around the path described by the dotted line,
∮
~H · d~ℓ = 0
since there is no current anywhere in the problem. If magnetization is upwards, as indicated bythe arrow, this would indicate that the flux density in the permanent magnet material is equal tothe remanent flux density (also upward).
A second problem is illustrated in Figure 14, in which the same magnet is embedded in amagnetic circuit with an air gap. Assume that the gap has width g and area Ag. The magnet hasheight hm and area Am. For convenience, we will take the positive reference direction to be up (aswe see it here) in the magnet and down in the air-gap.
Thus we are following the same reference direction as we go around the Ampere’s Law loop.That becomes:
∮
~H · d~ℓ = Hmhm +Hgg
Now, Gauss’ law could be written for either the upper or lower piece of the magnetic circuit.Assuming that the only substantive flux leaving or entering the magnetic circuit is either in themagnet or the gap:
∫∫
© ~B · d ~A = BmAm − µ0HgAg
Solving this pair we have:
Bm = −µ0Ag
Am
hm
gHm = µ0PuHm
10

Magnetic Circuit, µ→∞
Permanent Magnet
Figure 13: Permanent Magnet in Magnetic Circuit
Magnetic Circuit, µ→∞
Permanent Magnet
g
hm
Figure 14: Permanent Magnet Driving an Air-Gap
This defines the unit permeance, essentially the ratio of the permeance facing the permanentmagnet to the internal permeance of the magnet. The problem can be, if necessary, solved graph-ically, since the relationship between Bm and Hm is inherently nonlinear, as shown in Figure 15“load line” analysis of a nonlinear electronic circuit.
Now, one more ‘cut’ at this problem. Note that, at least for fairly large unit permeances theslope of the magnet characteristic is fairly constant. In fact, for most of the permanent magnetsused in machines (the one important exception is the now rarely used ALNICO alloy magnet), itis generally acceptable to approximate the demagnitization curve with:
~Bm = µm
(
~Hm + ~M0
)
Here, the magnetization M0 is fixed. Further, for almost all of the practical magnet materialsthe magnet permeability is nearly the same as that of free space (µm ≈ µ0). With that in mind,consider the problem shown in Figure 16, in which the magnet fills only part of a gap in a magneticcircuit. But here the magnet and gap areas are essentially the same. We could regard the magnetas simply a magnetization.
11

− ℘µ 0 u
Figure 15: Load Line, Unit Permeance Analysis
Magnetic Circuit, µ→∞
Permanent Magnet
Figure 16: Surface Magnet Primitive Problem
In the region of the magnet and the air-gap, Ampere’s Law and Gauss’ law can be written:
∇× ~H = 0
∇ · µ0
(
~Hm + ~M0
)
= 0
∇ · µ0~Hg = 0
Now, if in the magnet the magnetization is constant, the divergence of H in the magnet is zero.Because there is no current here, H is curl free, so that everywhere:
~H = −∇ψ∇2ψ = 0
That is, magnetic field can be expressed as the gradient of a scalar potential which satisfiesLaplace’s equation. It is also pretty clear that, if we can assign the scalar potential to have a valueof zero anywhere on the surface of the magnetic circuit it will be zero over all of the magneticcircuit (i.e. at both the top of the gap and the bottom of the magnet). Finally, note that we can’tactually assume that the scalar potential satisfies Laplace’s equation everywhere in the problem.In fact the divergence of M is zero everywhere except at the top surface of the magnet where it issingular! In fact, we can note that there is a (some would say fictitious) magnetic charge density:
ρm = −∇ · ~M
12

At the top of the magnet there is a discontinuous change in M and so the equivalent of a magnetic surface charge. Using Hg to note the magnetic field above the magnet and Hm to note the magnetic field in the magnet,
µ0Hg = µ0 (Hm + M0)
σm = M0 = Hg − Hm
and then to satisfy the potential condition, if hm is the height of the magnet and g is the gap:
gHg = −hmHm
Solving, hm
Hg = M0 hm + g
Now, one more observation could be made. We would produce the same air-gap flux density if we regard the permanent magnet as having a surface current around the periphery equal to the magnetization intensity. That is, if the surface current runs around the magnet:
Kφ = M0
This would produce an MMF in the gap of:
F = Kφhm
and then since the magnetic field is just the MMF divided by the total gap:
F hmHg = = M0
hm + g hm + g
The real utility of permanent magnets comes about from the relatively large magnetizations: numbers of a few to several thousand amperes per meter are common, and these would translate into enormous current densities in magnets of ordinary size.
3 Simple Permanent Magnet Machine Structures: Commutator
Machines
Figure 17 is a cartoon picture of a cross section of the geometry of a two-pole commutator machine using permanent magnets. This is actually the most common geometry that is used. The rotor (armature) of the machine is a conventional, windings-in-slots type, just as we have already seen for commutator machines. The field magnets are fastened (often just bonded) to the inside of a steel tube that serves as the magnetic flux return path.
Assume for the purpose of first-order analysis of this thing that the magnet is describable by its remanent flux density Br and has permeability of µ0. First, we will estimate the useful magnetic flux density and then will deal with voltage generated in the armature.
3.1 Interaction Flux Density
Using the basics of the analysis presented above, we may estimate the radial magnetic flux density at the air-gap as being:
BrBd =
1 + 1 Pc
13

Back Iron
Rotor
Permanent Magnets
R
g h m
Figure 17: PM Commutator Machine
where the effective unit permeance is:
fl hm AgPc = ff g Am
A book on this topic by James Ireland suggests values for the two “fudge factors”:
1. The “leakage factor” fl is cited as being about 1.1.
2. The “reluctance factor” ff is cited as being about 1.2.
We may further estimate the ratio of areas of the gap and magnet by:
Ag R + g 2=
Am R + g + h2 m
Now, there are a bunch of approximations and hand wavings in this expression, but it seems to work, at least for the kind of machines contemplated.
A second correction is required to correct the effective length for electrical interaction. The reason for this is that the magnets produce fringing fields, as if they were longer than the actual ”stack length” of the rotor (sometimes they actually are). This is purely empirical, and Ireland gives a value for effective length for voltage generation of:
∗ℓ=ℓeff fℓ
∗where ℓ = ℓ + 2NR , and the empirical coefficient
A hmN ≈ log 1 + B
B R
where
hmB = 7.4 − 9.0
R A = 0.9
14

3.1.1 Voltage:
It is, in this case, simplest to consider voltage generated in a single wire first. If the machine is running at angular velocity Ω, speed voltage is, while the wire is under a magnet,
vs = ΩRℓBr
Now, if the magnets have angular extent θm the voltage induced in a wire will have a waveform as shown in Figure 18: It is pulse-like and has the same shape as the magnetic field of the magnets.
θm
πvs
Ωt
Figure 18: Voltage Induced in One Conductor
The voltage produced by a coil is actually made up of two waveforms of exactly this form, but separated in time by the ”coil throw” angle. Then the total voltage waveform produced will be the sum of the two waveforms. If the coil thrown angle is larger than the magnet angle, the two voltage waveforms add to look like this: There are actually two coil-side waveforms that add with a slight phase shift.
vc
0m
0m
Figure 19: Voltage Induced in a Coil
If, on the other hand, the coil thrown is smaller than the magnet angle, the picture is the same, only the width of the pulses is that of the coil rather than the magnet. In either case the average voltage generated by a coil is:
∗θv = ΩRℓNs Bd
π ∗where θ is the lesser of the coil throw or magnet angles and Ns is the number of series turns in
the coil. This gives us the opportunity to develop the number of “active” turns:
∗ ∗θCa θ Ctot = Ns = m π m π
15

Here, Ca is the number of active conductors, Ctot is the total number of conductors and m is the number of parallel paths. The motor coefficient is then:
RℓeffCtotBd ∗θ
K = m π
3.2 Armature Resistance
The last element we need for first-order prediction of performance of the motor is the value of armature resistance. The armature resistance is simply determined by the length and area of the wire and by the number of parallel paths (generally equal to 2 for small commutator motors). If we note Nc as the number of coils and Na as the number of turns per coil,
NcNaNs =
m
Total armature resistance is given by:
NsRa = 2ρwℓt
m
where ρw is the resistivity (per unit length) of the wire:
1 ρw = π
4d2 wσw
(dw is wire diameter, σw is wire conductivity and ℓt is length of one half-turn). This length depends on how the machine is wound, but a good first-order guess might be something like this:
ℓt ≈ ℓ + πR
16

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machines
Class Notes 7: Permanent Magnet “Brushless DC” Motors September 5, 2005 c2005 James L. Kirtley Jr.
1 Introduction
This document is a brief introduction to the design evaluation of permanent magnet motors, with an eye toward servo and drive applications. It is organized in the following manner: First, we describe three different geometrical arrangements for permanent magnet motors:
1. Surface Mounted Magnets, Conventional Stator,
2. Surface Mounted Magnets, Air-Gap Stator Winding, and
3. Internal Magnets (Flux Concentrating).
After a qualitative discussion of these geometries, we will discuss the elementary rating parameters of the machine and show how to arrive at a rating and how to estimate the torque and power vs. speed capability of the motor. Then we will discuss how the machine geometry can be used to estimate both the elementary rating parameters and the parameters used to make more detailed estimates of the machine performance.
Some of the more involved mathematical derivations are contained in appendices to this note.
2 Motor Morphologies
There are, of course, many ways of building permanent magnet motors, but we will consider only a few in this note. Actually, once these are understood, rating evaluations of most other geometrical arrangements should be fairly straightforward. It should be understood that the “rotor inside” vs. “rotor outside” distinction is in fact trivial, with very few exceptions, which we will note.
2.1 Surface Magnet Machines
Figure 1 shows the basic magnetic morphology of the motor with magnets mounted on the surface of the rotor and an otherwise conventional stator winding. This sketch does not show some of the important mechanical aspects of the machine, such as the means for fastening the permanent magnets to the rotor, so one should look at it with a bit of caution. In addition, this sketch and the other sketches to follow are not necessarily to a scale that would result in workable machines.
This figure shows an axial section of a four-pole (p = 2) machine. The four magnets are mounted on a cylindrical rotor “core”, or shaft, made of ferromagnetic material. Typically this would simply be a steel shaft. In some applications the magnets may be simply bonded to the steel. For applications in which a glue joint is not satisfactory (e.g. for high speed machines) some sort of rotor banding or retaining ring structure is required.
1

Rotor Core (Shaft)Stator Winding
in Slots
Rotor Magnets
Stator Core
Air−Gap
Figure 1: Axial View of a Surface Mount Motor
The stator winding of this machine is “conventional”, very much like that of an induction motor, consisting of wires located in slots in the surface of the stator core. The stator core itself is made of laminated ferromagnetic material (probably silicon iron sheets), the character and thickness of the sheets determined by operating frequency and efficiency requirements. They are required to carry alternating magnetic fields, so must be laminated to reduce eddy current losses.
This sort of machine is simple in construction. Note that the operating magnetic flux density in the air-gap is nearly the same as in the magnets, so that this sort of machine cannot have air-gap flux densities higher than that of the remanent flux density of the magnets. If low cost ferrite magnets are used, this means relatively low induction and consequently relatively low efficiency and power density. (Note the qualifier “relatively” here!). Note, however, that with modern, high performance permanent magnet materials in which remanent flux densities can be on the order of 1.2 T, air-gap working flux densities can be on the order of 1 T. With the requirement for slots to carry the armature current, this may be a practical limit for air-gap flux density anyway.
It is also important to note that the magnets in this design are really in the “air gap” of the machine, and therefore are exposed to all of the time- and space- harmonics of the stator winding MMF. Because some permanent magnets have electrical conductivity (particularly the higher performance magnets), any asynchronous fields will tend to produce eddy currents and consequent losses in the magnets.
2.2 Interior Magnet or Flux Concentrating Machines
Interior magnet designs have been developed to counter several apparent or real shortcomings of surface mount motors:
• Flux concentrating designs allow the flux density in the air-gap to be higher than the flux density in the magnets themselves.
2

• In interior magnet designs there is some degree of shielding of the magnets from high order space harmonic fields by the pole pieces.
• There are control advantages to some types of interior magnet motors, as we will show anon. Essentially, they have relatively large negative saliency which enhances “flux weakening” for high speed operation, in rather direct analogy to what is done in DC machines.
• Some types of internal magnet designs have (or claim) structural advantages over surface mount magnet designs.
Slots
Stator Core
Rotor Pole Pieces
Armature in
Rotor Magnets
Non−magnetic Rotor Core (shaft)
Figure 2: Axial View of a Flux Concentrating Motor
The geometry of one type of internal magnet motor is shown (crudely) in Figure 2. The permanent magnets are oriented so that their magnetization is azimuthal. They are located between wedges of magnetic material (the pole pieces) in the rotor. Flux passes through these wedges, going radially at the air- gap, then azimuthally through the magnets. The central core of the rotor must be non-magnetic, to prevent “shorting out” the magnets. No structure is shown at all in this drawing, but quite obviously this sort of rotor is a structural challenge. Shown is a six-pole machine. Typically, one does not expect flux concentrating machines to have small pole numbers, because it is difficult to get more area inside the rotor than around the periphery. On the other hand, a machine built in this way but without substantial flux concentration will still have saliency and magnet shielding properties.
A second morphology for an internal magnet motor is shown in Figure 3. This geometry has been proposed for highly salient synchronous machines without permanent magnets: such machines would run on the saliency torque and are called synchronous reluctance motors. however, the saliency slots may be filled with permanent magnet material, giving them some internally generated flux as well. The rotor iron tends to short out the magnets, so that the ’bridges’ around the ends of the permanent magnets must be relatively thin. They are normally saturated.
3

Stator Core
Stator Slots
Air Gap
Rotor
Saliency Slots
Figure 3: Axial View of Internal Magnet Motor
At first sight, these machines appear to be quite complicated to analyze, and that judgement seems to hold up.
2.3 Air Gap Armature Windings
Shown in Figure 4 is a surface-mounted magnet machine with an air-gap, or surface armature winding. Such machines take advantage of the fact that modern permanent magnet materials have very low permeabilities and that, therefore, the magnetic field produced is relatively insensitive to the size of the air-gap of the machine. It is possible to eliminate the stator teeth and use all of the periphery of the air-gap for windings.
Not shown in this figure is the structure of the armature winding. This is not an issue in “conventional” stators, since the armature is contained in slots in the iron stator core. The use of an air-gap winding gives opportunities for economy of construction, new armature winding forms such as helical windings, elimination of “cogging” torques, and (possibly) higher power densities.
3 Zeroth Order Rating
In determining the rating of a machine, we may consider two separate sets of parameters. The first set, the elementary rating parameters, consist of the machine inductances, internal flux linkage and stator resistance. From these and a few assumptions about base and maximum speed it is possible to get a first estimate of the rating and performance of the motor. More detailed performance estimates, including efficiency in sustained operation, require estimation of other parameters. We will pay more attention to that first set of parameters, but will attempt to show how at least some of the more complete operating parameters can be estimated.
4

-
+
Rotor Core Stator Winding (Shaft)
Stator Core
000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000
000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000 000000000000000000000000
111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111
111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111 111111111111111111111111
000000000000000000000000111111111111111111111111
Rotor Magnets
000000000000000000000000 000000000000000000000000 000000000000000000000000
111111111111111111111111 111111111111111111111111 111111111111111111111111
Figure 4: Axial View of a PM Motor With an Air-Gap Winding
3.1 Voltage and Current: Round Rotor
To get started, consider the equivalent circuit shown in Figure 5. This is actually the equivalent circuit which describes all round rotor synchronous machines. It is directly equivalent only to some of the machines we are dealing with here, but it will serve to illustrate one or two important points.
X Ia ∩∩∩∩
+ Ea Vt −
Figure 5: Synchronous Machine Equivalent Circuit
What is shown here is the equivalent circuit of a single phase of the machine. Most motors are three-phase, but it is not difficult to carry out most of the analysis for an arbitrary number of phases. The circuit shows an internal voltage Ea and a reactance X which together with the terminal current I determine the terminal voltage V . In this picture armature resistance is ignored. If the machine is running in the sinusoidal steady state, the major quantities are of the form:
Ea = ωλa cos (ωt + δ)
Vt = V cos ωt
5

I
ψ V
δ
jXI
Ea
Figure 6: Phasor Diagram For A Synchronous Machine
Ia = I cos (ωt − ψ)
The machine is in synchronous operation if the internal and external voltages are at the same frequency and have a constant (or slowly changing) phase relationship (δ). The relationship between the major variables may be visualized by the phasor diagram shown in Figure 3.1. The internal voltage is just the time derivative of the internal flux from the permanent magnets, and the voltage drop in the machine reactance is also the time derivative of flux produced by armature current in the air-gap and in the “leakage” inductances of the machine. By convention, the angle ψ is positive when current I lags voltage V and the angle δ is positive then internal voltage Ea leads terminal voltage V . So both of these angles have negative sign in the situation shown in Figure 3.1.
If there are q phases, the time average power produced by this machine is simply:
P = q V I cos ψ
2
For most polyphase machines operating in what is called “balanced” operation (all phases doing the same thing with uniform phase differences between phases), torque (and consequently power) are approximately constant. Since we have ignored power dissipated in the machine armature, it must be true that power absorbed by the internal voltage source is the same as terminal power, or:
qP = EaI cos (ψ − δ)
2
Since in the steady state:ω
P = T p
where T is torque and ω/p is mechanical rotational speed, torque can be derived from the terminal quantities by simply:
qT = p λaI cos (ψ − δ)
2 In principal, then, to determine the torque and hence power rating of a machine it is only
necessary to determine the internal flux, the terminal current capability, and the speed capability of the rotor. In fact it is almost that simple. Unfortunately, the model shown in Figure 5 is not quite complete for some of the motors we will be dealing with, and we must go one more level into machine theory.
6

3.2 A Little Two-Reaction Theory
The material in this subsection is framed in terms of three-phase (q = 3) machine theory, but it is actually generalizable to an arbitrary number of phases. Suppose we have a machine whose three-phase armature can be characterized by internal fluxes and inductance which may, in general, not be constant but is a function of rotor position. Note that the simple model we presented in the previous subsection does not conform to this picture, because it assumes a constant terminal inductance. In that case, we have:
λph = L ph Iph + λR (1)
where λR is the set of internally produced fluxes (from the permanent magnets) and the stator winding may have both self- and mutual- inductances.
Now, we find it useful to do a transformation on these stator fluxes in the following way: each armature quantity, including flux, current and voltage, is projected into a coordinate system that is fixed to the rotor. This is often called the Park’s Transformation. For a three phase machine it is:
ud ua
uq = udq = Tuph = T
ub (2) u0 uc
Where the transformation and its inverse are:
cos θ cos(θ − 23 π ) cos(θ + 23
π ) 2π
T =2 − sin θ − sin(θ − 3 ) − sin(θ + 23
π ) (3)
3 1 1 1 2 2 2
cos θ − sin θ 1
2π 2π
T −1 = cos(θ − 3 ) − sin(θ − 3 ) 1
(4) 2πcos(θ + 23
π ) − sin(θ + 3 ) 1
It is easy to show that balanced polyphase quantities in the stationary, or phase variable frame, translate into constant quantities in the so-called “d-q” frame. For example:
Ia = I cos ωt 2π
Ib = I cos(ωt − )3 2π
Ic = I cos(ωt + )3
θ = ωt + θ0
maps to:
Id = I cos θ0
Iq = −I sin θ0
Now, if θ = ωt + θ0, the transformation coordinate system is chosen correctly and the “d-” axis will correspond with the axis on which the rotor magnets are making positive flux. That happens
7

if, when θ = 0, phase A is linking maximum positive flux from the permanent magnets. If this is the case, the internal fluxes are:
λaa = λf cos θ 2π
λab = λf cos(θ − )3 2π
λac = λf cos(θ + )3
Now, if we compute the fluxes in the d-q frame, we have:
λdq = L dq I dq + λR = TL T −1Idq + λR (5)
ph
Now: two things should be noted here. The first is that, if the coordinate system has been chosen as described above, the flux induced by the rotor is, in the d-q frame, simply:
λf
λR = 0
(6) 0
That is, the magnets produce flux only on the d- axis. The second thing to note is that, under certain assumptions, the inductances in the d-q frame
are independent of rotor position and have no mutual terms. That is:
Ld 0 0
L = TL T −1 = 0 Lq 0
(7) dq ph
0 0 L0
The assertion that inductances in the d-q frame are constant is actually questionable, but it is close enough to being true and analyses that use it have proven to be close enough to being correct that it (the assertion) has held up to the test of time. In fact the deviations from independence on rotor position are small. Independence of axes (that is, absence of mutual inductances in the d-q frame) is correct because the two axes are physically orthogonal. We tend to ignore the third, or “zero” axis in this analysis. It doesn’t couple to anything else and has neither flux nor current anyway. Note that the direct- and quadrature- axis inductances are in principle straightforward to compute. They are
direct axis the inductance of one of the armature phases (corrected for the fact of multiple phases) with the rotor aligned with the axis of the phase, and
quadrature axis the inductance of one of the phases with the rotor aligned 90 electrical degrees away from the axis of that phase.
Next, armature voltage is, ignoring resistance, given by:
d d V ph =
dtλph = T −1λdq (8)
dt and that the transformed armature voltage must be:
8

V dq = TV ph
d = T (T −1λdq )dt
d d = λdq + (T T −1)λdq (9)
dt dt The second term in this expresses “speed voltage”. A good deal of straightforward but tedious
manipulation yields:
0 −dθ 0
dt d dθ
T T −1 = dt 0 0 (10)
dt 0 0 0
The direct- and quadrature- axis voltage expressions are then:
dλdVd = − ωλq (11)
dt dλq
Vq = + ωλd (12) dt
where dθ
ω = dt
Instantaneous power is given by:
P = VaIa + VbIb + VcIc (13)
Using the transformations given above, this can be shown to be:
3 3 P =
2 VdId +
2 Vq Iq + 3V0I0 (14)
which, in turn, is:
P = ω 3
2(λdIq − λq Id) +
3
2( dλd
dt Id +
dλq dt
Iq ) + 3 dλ0
dt I0 (15)
Then, noting that ω = pΩ and that (15) describes electrical terminal power as the sum of shaft power and rate of change of stored energy, we may deduce that torque is given by:
qT = p(λdIq − λq Id) (16)
2
Note that we have stated a generalization to a q- phase machine even though the derivation given here was carried out for the q = 3 case. Of course three phase machines are by far the most common case. Machines with higher numbers of phases behave in the same way (and this generalization is valid for all purposes to which we put it), but there are more rotor variables analogous to “zero axis”.
Now, noting that, in general, Ld and Lq are not necessarily equal,
λd = LdId + λf (17)
λq = Lq Iq (18)
then torque is given by: q
T = p (λf + (Ld − Lq ) Id) Iq (19) 2
9

3.3 Finding Torque Capability
For high performance drives, we will generally assume that the power supply, generally an inverter, can supply currents in the correct spatial relationship to the rotor to produce torque in some reasonably effective fashion. We will show in this section how to determine, given a required torque (or if the torque is limited by either voltage or current which we will discuss anon), what the values of Id and Iq must be. Then the power supply, given some means of determining where the rotor is (the instantaneous value of θ), will use the inverse Park’s transformation to determine the instantaneous valued required for phase currents. This is the essence of what is known as “field oriented control”, or putting stator currents in the correct location in space to produce the required torque.
Our objective in this section is, given the elementary parameters of the motor, find the capability of the motor to produce torque. There are three things to consider here:
• Armature current is limited, generally by heating,
• A second limit is the voltage capability of the supply, particularly at high speed, and
• If the machine is operating within these two limits, we should consider the optimal placement of currents (that is, how to get the most torque per unit of current to minimize losses).
Often the discussion of current placement is carried out using, as a tool to visualize what is going on, the Id, Iq plane. Operation in the steady state implies a single point on this plane. A simple illustration is shown in Figure 7. The thermally limited armature current capability is represented as a circle around the origin, since the magnitude of armature current is just the length of a vector from the origin in this space. In general, for permanent magnet machines with buried magnets, Ld < Lq , so the optimal operation of the machine will be with negative Id. We will show how to determine this optimum operation anon, but it will in general follow a curve in the Id, Iq plane as shown.
Finally, an ellipse describes the voltage limit. To start, consider what would happen if the terminals of the machine were to be short-circuited so that V = 0. If the machine is operating at sufficiently high speed so that armature resistance is negligible, armature current would be simply:
λfId = −
Ld
Iq = 0
Now, loci of constant flux turn out to be ellipses around this point on the plane. Since terminal flux is proportional to voltage and inversely proportional to frequency, if the machine is operating with a given terminal voltage, the ability of that voltage to command current in the Id, Iq plane is an ellipse whose size “shrinks” as speed increases.
To simplify the mathematics involved in this estimation, we normalize reactances, fluxes, currents and torques. First, let us define the base flux to be simply λb = λf and the base current Ib to be the armature capability. Then we define two per-unit reactances:
LdIb xd = (20)
λb Lq Ib
xq = (21) λb
10

√ √ √ √
√
√ √ √ √
√
Voltage Limit
Armature Current Limit Optimal Torque Locus
i q
id
Loci
Speed = Base Speed > Base
Short Circuit Point
Figure 7: Limits to Operation
Next, define the base torque to be: q
Tb = p λbIb2
and then, given per-unit currents id and iq , the per-unit torque is simply:
te = (1 − (xq − xd) id) iq (22)
It is fairly straightforward (but a bit tedious) to show that the locus of current-optimal operation (that is, the largest torque for a given current magnitude or the smallest current magnitude for a given torque) is along the curve:
( )2 √( )2
√ i2 1 1 √ 1 i2 √ aid = − a + 2 − + (23)
2 4 (xq − xd) 2 (xq − xd) 4 (xq − xd) 2
( )2 √( )2
√ i2 1 1 √ 1 i2 √ aiq = − a − 2 + + (24)
2 4 (xq − xd) 2 (xq − xd) 4 (xq − xd) 2
The “rating point” will be the point along this curve when ia = 1, or where this curve crosses the armature capability circle in the id, iq plane. It should be noted that this set of expressions only works for salient machines. For non-salient machines, of course, torque-optimal current is on the q-axis. In general, for machines with saliency, the “per-unit” torque will not be unity at the rating, so that the rated, or “Base Speed” torque is not the “Base” torque, but:
Tr = Tb × te (25)
where te is calculated at the rating point (that is, ia = 1 and id and iq as per (23) and (24)).
11

√
√
√
√ √ √ √ (
√
For sufficiently low speeds, the power electronic drive can command the optimal current to produce torque up to rated. However, for speeds higher than the “Base Speed”, this is no longer true. Define a per-unit terminal flux:
V ψ =
ωλb
Operation at a given flux magnitude implies:
ψ2 = (1 + xdid)2 + (xq iq )
2
which is an ellipse in the id, iq plane. The Base Speed is that speed at which this ellipse crosses the point where the optimal current curve crosses the armature capability. Operation at the highest attainable torque (for a given speed) generally implies d-axis currents that are higher than those on the optimal current locus. What is happening here is the (negative) d-axis current serves to reduce effective machine flux and hence voltage which is limiting q-axis current. Thus operation above the base speed is often referred to as “flux weakening”.
The strategy for picking the correct trajectory for current in the id, iq plane depends on the value of the per-unit reactance xd. For values of xd > 1, it is possible to produce some torque at any
speed. For values of xd < 1, there is a speed for which no point in the armature current capability is within the voltage limiting ellipse, so that useful torque has gone to zero. Generally, the maximum torque operating point is the intersection of the armature current limit and the voltage limiting ellipse:
√( )2 2
q − ψ2 + 1 √ xxd xdid = (26) − +2
d 2 d
2 d
2 q
2 q − x 2
q − x− xx x x
2 diq = 1 − i (27)
It may be that there is no intersection between the armature capability and the voltage limiting ellipse. If this is the case and if xd < 1, torque capability at the given speed is zero.
If, on the other hand, xd > 1, it may be that the intersection between the voltage limiting ellipse and the armature current limit is not the maximum torque point. To find out, we calculate the maximum torque point on the voltage limiting ellipse. This is done in the usual way by differentiating torque with respect to id while holding the relationship between id and iq to be on the ellipse. The algebra is a bit messy, and results in:
)22 d
2 d xd) (ψ2 − 1) + 3xd (xq − xd) −3xd (xq − xd) − (xq −xx xd
id = − (28) − +2 (xqd − 2 (xqd − 2 d4x xd) 4x xd) 2 (xq − xd)x
1 iq = ψ2 − (1 + xdid)
2 (29) xq
Ordinarily, it is probably easiest to compute (28) and (29) first, then test to see if the currents are outside the armature capability, and if they are, use (26) and (27).
These expressions give us the capability to estimate the torque-speed curve for a machine. As an example, the machine described by the parameters cited in Table 1 is a (nominal) 3 HP, 4-pole, 3000 RPM machine.
The rated operating point turns out to have the following attributes:
12

∫
Table 1: Example Machine
D- Axis Inductance 2.53 mHy Q- Axis Inductance 6.38 mHy Internal Flux 58.1 mWb Armature Current 30 A
Table 2: Operating Characteristics of Example Machine
Per-Unit D-Axis Current At Rating Point id -.5924 Per-Unit Q-Axis Current At Rating Point iq .8056 Per-Unit D-Axis Reactance xd 1.306 Per-Unit Q-Axis Reactance xq 3.294 Rated Torque (Nm) Tr 9.17 Terminal Voltage at Base Point (V) 97
The loci of operation in the Id, Iq plane is shown in Figure 8. The armature current limit is shown only in the second and third quadrants, so shows up as a semicircle. The two ellipses correspond with the rated point (the larger ellipse) and with a speed that is three times rated (9000 RPM). The torque-optimal current locus can be seen running from the origin to the rating point, and the higher speed operating locus follows the armature current limit. Figure 9 shows the torque/speed and power/speed curves. Note that this sort of machine only approximates “constant power” operation at speeds above the “base” or rating point speed.
4 Parameter Estimation
We are now at the point of estimating the major parameters of the motors. Because we have a number of different motor geometries to consider, and because they share parameters in not too orderly a fashion, this section will have a number of sub-parts. First, we calculate flux linkage, then reactance.
4.1 Flux Linkage
Given a machine which may be considered to be uniform in the axial direction, flux linked by a single, full-pitched coil which spans an angle from zero to π/p, is:
φ = Br Rldφ 0
where Br is the radial flux through the coil. And, if Br is sinusoidally distributed this will have a peak value of
2RlBrφp =
p
13
πp

0
PM Brushless Machine Current Loci 60
40
20
0
-20
-40
-60
Q-A
xis
Cur
rent
(A
)
-80 -60 -40 -20 0 20D-Axis Current (A)
Figure 8: Operating Current Loci of Example Machine
PM Brushless Machine
0
2
4
6
8
10
Tor
que,
N-m
1000 2000 3000 4000 5000 6000 7000 8000 9000
0
1000
2000
3000
4000
Pow
er, W
atts
1000 2000 3000 4000 5000 6000 7000 8000 9000 Speed, RPM
Figure 9: Torque- and Power-Speed Capability
14
0

( ) ( ) ( )
( ) ( )
( ) ( ) ( )
Now, if the actual winding has Na turns, and using the pitch and breadth factors derived in Appendix 1, the total flux linked is simply:
2RlB1Nakwλf = (30)
p
where
kw = kpkb α
kp = sin 2
sin m γ
kb = 2
m sin γ 2
The angle α is the pitch angle, Np
α = 2πp Ns
where Np is the coil span (in slots) and Ns is the total number of slots in the stator. The angle γ is the slot electrical angle:
2πp γ =
Ns
Now, what remains to be found is the space fundamental magnetic flux density B1. In Appendix 2 it is shown that, for magnets in a surface-mount geometry, the magnetic field at the surface of the magnetic gap is:
B1 = µ0M1kg (31)
where the space-fundamental magnetization is:
Br 4 pθmM1 = sin
µ0 π 2
where Br is remanent flux density of the permanent magnets and θm is the magnet angle. and where the factor that describes the geometry of the magnetic gap depends on the case. For
magnets inside and p = 1,
Rp−1 pRp+1 − Rp+1 p
Ri 2p 1−p 1−p
2p 2 1 + R1 − R2 skg =
Rs − Ri 2p p + 1 p − 1
For magnets inside and p = 1,
1 1 kg =
R2 − R2 R2 2 − R2 + Ri
2 log R2
2 1 R1s i
For the case of magnets outside and p = 1:
Rip−1 p
Rp+1 − Rp+1 1−p 1−pkg = Rs − Ri
2p p + 1 +
pR2p R1 − R22p 2 1 p − 1 s
and for magnets outside and p = 1,
15

( ) ( )
∫
( )
( )
1 1 2 − R2 + R2 R2
2 R1 kg =
R2 − R2 R21 s log
s i
Where Rs and Ri are the outer and inner magnetic boundaries, respectively, and R2 and R1
are the outer and inner boundaries of the magnets. Note that for the case of a small gap, in which both the physical gap g and the magnet thickness
hm are both much less than rotor radius, it is straightforward to show that all of the above expressions approach what one would calculate using a simple, one-dimensional model for the permanent magnet:
hmkg →
g + hm
This is the whole story for the winding-in-slot, narrow air-gap, surface magnet machine. For air-gap armature windings, it is necessary to take into account the radial dependence of the magnetic field.
4.2 Air-Gap Armature Windings
With no windings in slots, the conventional definition of winding factor becomes difficult to apply. If, however, each of the phase belts of the winding occupies an angular extent θw, then the equivalent to (31) is:
sin p θw
kw = θw
2
p 2
Next, assume that the “density” of conductors within each of the phase belts of the armature winding is uniform, so that the density of turns as a function of radius is:
2Nar N (r) =
R2 − R2 wo wi
This just expresses the fact that there is more azimuthal room at larger radii, so with uniform density the number of turns as a function of radius is linearly dependent on radius. Here, Rwo and Rwi are the outer and inner radii, respectively, of the winding.
Now it is possible to compute the flux linked due to a magnetic field distribution:
Rwo 2lNakwr 2r λf =
R2 − R2 µ0Hr(r)dr (32) pRwi wo wi
Note the form of the magnetic field as a function of radius expressed in 80 and 81 of the second appendix. For the “winding outside” case it is:
Hr = A rp−1 + R2p −p−1 rs
Then a winding with all its turns concentrated at the outer radius r = Rwo would link flux:
2lRwokwλc = µ0Hr(Rwo) =
2lRwokw µ0A Rp−1 + R2pR−p−1
wo s wo p p
16

( ) ( )
( ) ( )
( )
( )
Carrying out (32), it is possible, then, to express the flux linked by a thick winding to the flux that would have been linked by a radially concentrated winding at its outer surface by:
λfkt =
λc
where, for the winding outside, p = 2 case:
ξ2p2 1 − x2+p 1 − x2−p
kt = (1 − x2) (1 + ξ2p) 2 + p
+2 − p
(33)
where we have used the definitions ξ = Rwo/Rs and x = Rwi/Rwo. In the case of winding outside, p = 2,
2 1 − x4 ξ4
kt =(1 − x2) (1 + ξ2p) 4
− log x (34)
In a very similar way, we can define a winding factor for a thick winding in which the reference radius is at the inner surface. (Note: this is done because the inner surface of the inside winding is likely to be coincident with the inner ferromagnetic surface, as the outer surface of the outer winding ls likely to be coincident with the outer ferromagnetic surface). For p = 2:
2x−p 1 − x2+p 1 − x2−p
kt =(1 − x2) (1 + η2p) 2 + p
+ (ηx)2p
2 − p (35)
and for p = 2: 2x−2 1 − x4
kt = − (ηx)4 log x (36) (1 − x2) (1 + η2p) 4
where η = Ri/Rwi So, in summary, the flux linked by an air-gap armature is given by:
2RlB1Nakwktλf = (37)
p
where B1 is the flux density at the outer radius of the physical winding (for outside winding machines) or at the inner radius of the physical winding (for inside winding machines). Note that the additional factor kt is a bit more than one (it approaches unity for thin windings), so that, for small pole numbers and windings that are not too thick, it is almost correct and in any case “conservative” to take it to be one.
4.3 Interior Magnet Motors:
For the flux concentrating machine, it is possible to estimate air-gap flux density using a simple reluctance model.
The air- gap permeance of one pole piece is:
Rθp℘ag = µ0l
g
where θp is the angular width of the pole piece.
17

And the incremental permeance of a magnet is:
hml ℘m = µ0
wm
The magnet sees a unit permeance consisting of its own permeance in series with one half of each of two pole pieces (in series) :
℘ag Rθp wm℘u = =
℘m 4g hm
Magnetic flux density in the magnet is:
℘uBm = B0
1 + ℘u
And then flux density in the air gap is:
2hm 2hmwmBg = Bm = B0
Rθp 4ghm + Rθpwm
The space fundamental of that can be written as:
4 pθp wmB1 = sin B0 γm
π 2 2g
where we have introduced the shorthand:
1γm =
1 + wm θp R g 4 hm
The flux linkage is then computed as before:
2RlB1Nakwλf = (38)
p
4.4 Winding Inductances
The next important set of parameters to compute are the d- and q- axis inductances of the machine. We will consider three separate cases, the winding-in-slot, surface magnet case, which is magnetically “round”, or non-salient, the air-gap winding case, and the flux concentrating case which is salient, or has different direct- and quadrature- axis inductances.
4.4.1 Surface Magnets, Windings in Slots
In this configuration there is no saliency, so that Ld = Lq . There are two principal parts to inductance, the air-gap inductance and slot leakage inductance. Other components, including end turn leakage, may be important in some configurations, and they would be computed in the same way as for an induction machine. If magnet thickness is not too great, we may make the narrow air-gap assumption, in which case the fundamental part of air-gap inductance is:
q 4 µ0N 2k2 lRsLd1 = a w
2 π p2(g + hm) (39)
18

( )
[ ]
Here, g is the magnetic gap, including the physical rotational gap and any magnet retaining means that might be used. hm is the magnet thickness.
Since the magnet thickness is included in the air-gap, the air-gap permeance may not be very large, so that slot leakage inductance may be important. To estimate this, assume that the slot shape is rectangular, characterized by the following dimensions: hs height of the main portion of the slot ws width of the top of the main portion of the slot hd height of the slot depression wd slot depression opening
Of course not all slots are rectangular: in fact in most machines the slots are trapezoidal in shape to maintain teeth cross-sections that are radially uniform. However, only a very small error (a few percent) is incurred in calculating slot permeance if the slot is assumed to be rectangular and the top width is used (that is the width closest to the air-gap). Then the slot permeance is, per unit length:
1 hs hdP = µ0 + 3 ws wd
Assume for the rest of this discussion a standard winding, with m slots in each phase belt (this assumes, then, that the total number of slots is Ns = 2pqm), and each slot holds two half-coils. (A half-coil is one side of a coil which, of course, is wound in two slots). If each coil has Nc turns (meaning Na = 2pmNc) , then the contribution to phase self-inductance of one
slot is, if both half-coils are from the same phase, 4lPN 2 . If the half-coils are from different c phases, then the contribution to self inductance is lPN 2 and the magnitude of the contribution to c mutual inductance is lPN 2 . (Some caution is required here. For three phase windings the mutual c inductance is negative, so are the senses of the currents in the two other phases, so the impact of “mutual leakage” is to increase the reactance. This will be true for other numbers of phases as well, even if the algebraic sign of the mutual leakage inductance is positive, in which case so will be the sense of the other- phase current.)
We will make two other assumptions here. The standard one is that the winding “coil throw”, or span between sides of a coil, is Ns − Nsp. Nsp is the coil “short pitch”. The other is that each 2p phase belt will overlap with, at most two other phases: the ones on either side in sequence. This last assumption is immediately true for three- phase windings (because there are only two other phases. It is also likely to be true for any reasonable number of phases.
Noting that each phase occupies 2p(m − Nsp) slots with both coil halves in the same slot and 2pNsp slots in which one coil half shares a slot with each of two different phases, we can write down the two components of slot leakage inductance, self- and mutual:
Las = 2pl (m − Nsp) (2Nc)2 + 2NspN 2
c
Lam = −2plNspN 2 c
For a three- phase machine, then, the total slot leakage inductance is:
La = Las − Lam = 2plPN 2 (4m − Nsp)c
For a uniform, symmetric winding with an odd number of phases, it is possible to show that the effective slot leakage inductance is:
2π La = Las − 2Lam cos
q
19

∑
( ) ( )
( ) ( )
( ) ( )
( ) ( )
Total synchronous inductance is the sum of air-gap and leakage components: so far this is:
Ld = Ld1 + La
4.4.2 Air-Gap Armature Windings
It is shown in Appendix 1 that the inductance of a single-phase of an air-gap winding is:
La = Lnp n
where the harmonic components are:
8 µ0lk
2 N2 1 − x2−kγ2k 1 − x2+k
Lk = wn a
π k(1 − x2)2 (4 − k2) (1 − γ2k)
( )2 ( )2 ξ2k ξ−2k1 − xk+2 1 − x2−k
+ + (2 + k)2 (1 − γ2k) (2 − k)2 (γ−2k − 1)
1 − γ−2k 2+kx 1 − x2−k
k 1 − x2
− (4 − k2) (γ−2k − 1) 4 − k2 2
+
where we have used the following shorthand coefficients:
Rwi x =
Rwo
Riγ =
Rs
Rwo ξ =
Rs
This fits into the conventional inductance framework:
4 µ0N2RsLk
2
Ln = a wn ka2π N2p g
if we assign the “thick armature” coefficient to be:
2gk 1 1 − x2−kγ2k 1 − x2+k
ka = Rwo (1 − x2)2 (4 − k2) (1 − γ2k)
( )2 ( )2 ξ2k ξ−2k1 − xk+2 1 − x2−k
+ + (2 + k)2 (1 − γ2k) (2 − k)2 (γ−2k − 1)
1 − γ−2k 2+kx 1 − x2−k
k 1 − x2
− (4 − k2) (γ−2k − 1) 4 − k2 2
+
20

[ ] ( ) (
and k = np and g = Rs − Ri is the conventionally defined “air gap”. If the aspect ratio Ri/Rs is not too far from unity, neither is ka. In the case of p = 2, the fundamental component of ka is:
4 1 − γ4 γ42gk 1 1 − x4 2γ4 + x ξ4 1 − x4)2
ka = Rwo (1 − x2)2 8
− 4 (1 − γ4)
log x + ξ4 (1 − γ4)
(log x)2 + 16 (1 − γ4)
For a q-phase winding, a good approximation to the inductance is given by just the first space harmonic term, or:
q 4 µ0N 2RsLk2
Ld = a wn ka22 π n2p g
4.4.3 Internal Magnet Motor
The permanent magnets will have an effect on reactance because the magnets are in the main flux path of the armature. Further, they affect direct and quadrature reactances differently, so that the machine will be salient. Actually, the effect on the direct axis will likely be greater, so that this type of machine will exhibit “negative” saliency: the quadrature axis reactance will be larger than the direct- axis reactance.
A full- pitch coil aligned with the direct axis of the machine would produce flux density:
µ0NaI Br = ( )
2g 1 + Rθp wm
4g hm
Note that only the pole area is carrying useful flux, so that the space fundamental of radial flux density is:
µ0NaI 4 sin pθm
B1 =2g wm
2 Rθpπ 1 +
hm 4g
Then, since the flux linked by the winding is:
2RlNakw B1λa =
p
The d- axis inductance, including mutual phase coupling, is (for a q- phase machine):
q 4 µ0N 2Rlk2 pθpLd = a w γm sin
p22 π g 2
The quadrature axis is quite different. On that axis, the armature does not tend to push flux through the magnets, so they have only a minor effect. What effect they do have is due to the fact that the magnets produce a space in the active air- gap. Thus, while a full- pitch coil aligned with the quadrature axis will produce an air- gap flux density:
µ0N I Br =
g
the space fundamental of that will be:
21

( )
( )
( )
5
µ0N I 4 pθtB1 = 1 − sin
g π 2
where θt is the angular width taken out of the pole by the magnets. So that the expression for quadrature axis inductance is:
q 4 µ0N 2Rlk2 pθtLq = a w 1 − sin
p22 π g 2
Current Rating and Resistance
The last part of machine rating is its current capability. This is heavily influenced by cooling methods, for the principal limit on current is the heating produced by resistive dissipation. Generally, it is possible to do first-order design estimates by assuming a current density that can be handled by a particular cooling scheme. Then, in an air-gap winding:
NaIa = R2 − R2 θwe Jawo wi 2
and note that, usually, the armature fills the azimuthal space in the machine:
2qθwe = 2π
For a winding in slots, nearly the same thing is true: if the rectangular slot model holds true:
2qNaIa = NshswsJs
where we are using Js to note slot current density. Now, suppose we can characterize the total slot area by a “space factor” λs which is the ratio between total slot area and the annulus occupied by the slots: for the rectangular slot model:
Nshswsλs = ( )
π R2 − R2 wo wi
where Rwi = R+hd and Rwo = Rwi +hs in a normal, stator outside winding. In this case, Ja = Jsλs
and the two types of machines can be evaluated in the same way. It would seem apparent that one would want to make λs as large as possible, to permit high
currents. The limit on this is that the magnetic teeth between the conductors must be able to carry the air-gap flux, and making them too narrow would cause them to saturate. The peak of the time fundamental magnetic field in the teeth is, for example,
2πR Bt = B1
Nswt
where wt is the width of a stator tooth:
2π(R + hd) wt =
Ns − ws
so that B1
Bt ≈ 1 − λs
22

5.1 Resistance
Winding resistance may be estimated as the length of the stator conductor divided by its area and its conductivity. The length of the stator conductor is:
lc = 2lNafe
where the “end winding factor” fe is used to take into account the extra length of the end turns (which is usually not negligible). The area of each turn of wire is, for an air-gap winding :
− R2θwe R2
Aw = wo wi λw2 Na
where λw, the “packing factor” relates the area of conductor to the total area of the winding. The resistance is then just:
4lN 2
Ra = ( a )
R2 − R2θwe wo wi λwσ
and, of course, σ is the conductivity of the conductor. For windings in slots the expression is almost the same, simply substituting the total slot area:
2qlN 2
Ra = a
Nshswsλwσ
The end turn allowance depends strongly on how the machine is made. One way of estimating what it might be is to assume that the end turns follow a roughly circular path from one side of the machine to the other. The radius of this circle would be, very roughly, Rw/p, where Rw is the average radius of the winding: Rw ≈ (Rwo + Rwi)/2
Then the end-turn allowance would be:
πRwfe = 1 +
pl
6 Appendix 1: Air-Gap Winding Inductance
In this appendix we use a simple two-dimensional model to estimate the magnetic fields and then inductances of an air-gap winding. The principal limiting assumption here is that the winding is uniform in the z direction, which means it is long in comparison with its radii. This is generally not true, nevertheless the answers we will get are not too far from being correct. The style of analysis used here can be carried into a three-dimensional, or quasi-three dimensional domain to get much more precise answers, at the expense of a very substantial increase in complexity.
The coordinate system to be used is shown in Figure 10. To maintain generality we have four radii: Ri and Rs are ferromagnetic boundaries, and would of course correspond with the machine shaft and the stator core. The winding itself is carried between radii R1 and R2, which correspond with radii Rwi and Rwo in the body of the text. It is assumed that the armature is carrying a current in the z- direction, and that this current is uniform in the radial dimension of the armature. If a single phase of the armature is carrying current, that current will be:
NaIaJz0 = ( )
θwe R2 2 − R2
2 1
23

0000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000
( )
Outer Magnetic Boundary
Winding
Inner Magnetic Boundary
11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111
000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000
111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111
i
R 1 R 2
R s
R
Figure 10: Coordinate System for Inductance Calculation
over the annular wedge occupied by the phase. The resulting distribution can be fourier analyzed, and the n-th harmonic component of this will be (assuming the coordinate system has been chosen appropriately):
4 θwe 4 NaIaJzn = Jz0 sin n =
2 −R2 kwn nπ 2 π R2
1
where the n-th harmonic winding factor is:
sin n θwe
kwn = θwe
2
n 2
and note that θwe is the electrical winding angle:
θwe = pθw
Now, it is easiest to approach this problem using a vector potential. Since the divergence of flux density is zero, it is possible to let the magnetic flux density be represented by the curl of a vector potential:
B = ∇×A
Taking the curl of that:
∇× ∇ ×A
and using the Coulomb gage ∇ ·A = 0
we have a reasonable tractable partial differential equation in the vector potential:
∇2A = −µ0J
Now, since in our assumption there is only a z- directed component of J , we can use that one component, and in circular cylindrical coordinates that is:
1 ∂ ∂Az 1 ∂2
r + Az = −µ0Jz r2 ∂θ2r ∂r ∂r
24
= µ0J = ∇∇ · A −∇2A

( )
For this problem, all variables will be varying sinusoidally with angle, so we will assume that angular dependence ejkθ . Thus:
1 ∂ ∂Az k2
r − Az = −µ0Jz (40) r ∂r ∂r r2
This is a three-region problem. Note the regions as:
i Ri < r < R1
w R1 < r < R2
o R2 < r < Rs
For i and o, the current density is zero and an appropriate solution to (40) is:
−kAz = A+r k + A−r
In the region of the winding, w, a particular solution must be used in addition to the homogeneous solution, and
−kAz = A+r k + A−r + Ap
where, for k = 2, µ0Jz r
2
Ap = −4 − k2
or, if k = 2, µ0Jz r
2 1 Ap = − log r −
4 4
And, of course, the two pertinent components of the magnetic flux density are:
1 ∂AzBr =
r ∂θ ∂Az
Bθ = − ∂r
Next, it is necessary to match boundary conditions. There are six free variables and correspondingly there must be six of these boundary conditions. They are the following:
• At the inner and outer magnetic boundaries, r = Ri and r = Rs, the azimuthal magnetic field must vanish.
• At the inner and outer radii of the winding itself, r = R1 and r = R2, both radial and azimuthal magnetic field must be continuous.
These conditions may be summarized by:
Rk−1 R−k−1kAi − kAi = 0+ i − i
Rk−1 R−k−1kAo − kAo = 0+ s − s
Aw Rk−1 + Aw R−k−1 µ0JzR2− = Ao Rk−1 + Ao R−k−1 + 2 − 2 4 − k2 + 2 − 2
25

[( )
[( )
( ) + ( )
−kAw Rk−1 + kAw R−k−1 2µ0JzR2 = −kAo Rk−1 + kAo R−k−1
+ 2 − 2 +4 − k2 + 2 − 2
Aw Rk−1 + Aw R−k−1 µ0JzR1− = Ai Rk−1 + Ai R−k−1 + 1 − 1 4 − k2 + 1 − 1
Rk−1 R−k−1 2µ0JzR1 Rk−1 R−k−1−kAw + kAw
+ 1 − 1 +4 − k2
= −kA+i
1 + kA−
i 1
Note that we are carrying this out here only for the case of k = 2. The k = 2 case may be obtained by substituting its particular solution in at the beginning or by using L’Hopital’s rule on the final solution. This set may be solved (it is a bit tedious but quite straightforward) to yield, for the winding region:
µ0Jz R2kR2−k − R2kR2−k R2+k − R2+k
Az = s 2 i 1 2 1 k( ) + ( ) r
2k (2 − k) R2k − R2k (2 + k) R2k − R2k s i s i
R2−k − R2−k R−2kR2+k − R−2kR2+k 2k 22 1 s 2 i 1 −k+ ( ) + ( )
r − r 4 − k2
(2 − k) R−2k − R−2k (2 + k) R−2k − R−2k s i si
Now, the inductance linked by any single, full-pitched loop of wire located with one side at azimuthal position θ and radius r is:
λi = 2lAz(r, θ)
To extend this to the whole winding, we integrate over the area of the winding the incremental flux linked by each element times the turns density. This is, for the n-th harmonic of flux linked:
∫ R24lkwnNaλn =
2 − R2 Az(r)rdr R2
1 R1
Making the appropriate substitutions for current into the expression for vector potential, this becomes:
R2+k − R2+k Rk+2 − Rk+2
λn =8 µ
( 0lk
2 N 2 s 2 1wn a Ia R2kR2−k − Ri 2kR2−k
2 1 2 1
2 − R2)2 (2 − k) R2k − R2k (2 + k) R2k − R2k k + 2 π k R2
1 s i 2 i
R2−k − R2−k R−2kR2+k − R−2kR2+k R2−k − R2−k 2 − R42k R4
12 1 s 2 i 1 2 1+ ( ) + ( )
− (2 − k) R−2k − R−2k (2 + k) R−2k − R−2k 2 − k 4 − k2 4
s i si
7 Appendix 2: Permanent Magnet Field Analysis
This section is a field analysis of the kind of radially magnetized, permanent magnet structures commonly used in electric machinery. It is a fairly general analysis, which will be suitable for use with either surface or in-slot windings, and for the magnet inside or the magnet outside case.
This is a two-dimensional layout suitable for situations in which field variation along the length of the structure is negligible.
26

0000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000
8 Layout
The assumed geometry is shown in Figure 11. Assumed iron (highly permeable) boundaries are at radii Ri and Rs. The permanent magnets, assumed to be polarized radially and alternately (i.e. North-South ...), are located between radii R1 and R2. We assume there are p pole pairs (2p magnets) and that each magnet subsumes an electrical angle of θme. The electrical angle is just p times the physical angle, so that if the magnet angle were θme = π, the magnets would be touching.
Outer Magnetic Boundary
Magnets
11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111 11111111111111111111111111111
000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000 000000000000
111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111 111111111111
Boundary
R s
R i
R 1 R 2 Inner Magnetic
Figure 11: Axial View of Magnetic Field Problem
If the magnets are arranged so that the radially polarized magnets are located around the azimuthal origin (θ = 0), the space fundamental of magnetization is:
M = ir M0 cos pθ (41)
where the fundamental magnitude is:
4 θme Brem M0 = sin (42)
π 2 µ0
and Brem is the remanent magnetization of the permanent magnet. Since there is no current anywhere in this problem, it is convenient to treat magnetic field as
the gradient of a scalar potential:
H = −∇ψ (43)
The divergence of this is: ∇2ψ = −∇ · H (44)
27

( )
Since magnetic flux density is divergence-free,
∇ · B = 0 (45)
we have:
∇ · H = −∇ · M (46)
or:
∇2ψ = ∇ · M =1 M0 cos pθ (47) r
Now, if we let the magnetic scalar potential be the sum of particular and homogeneous parts:
ψ = ψp + ψh (48)
where ∇2ψh = 0, then:
∇2ψp =1 M0 cos pθ (49) r
We can find a suitable solution to the particular part of this in the region of magnetization by trying:
ψp = Cr γ cos pθ (50)
Carrying out the Laplacian on this:
∇2ψp = Cr γ−2 γ2 − p 2 cos pθ =1 M0 cos pθ (51) r
which works if γ = 1, in which case:
M0r ψp = cos pθ (52)
1 − p2
Of course this solution holds only for the region of the magnets: R1 < r < R2, and is zero for the regions outside of the magnets.
A suitable homogeneous solution satisfies Laplace’s equation, ∇2ψh = 0, and is in general of the form:
ψh = Arp cos pθ + Br −p cos pθ (53)
Then we may write a trial total solution for the flux density as:
Ri < r < R1 ψ = ( A1r
p + B1r −p ) cos pθ (54)
R1 < r < R2 ψ =
(
A2rp + B2r
−p + M0r
1 − p2
)
cos pθ (55)
R2 < r < Rs ψ = ( A3r
p + B3r −p ) cos pθ (56)
The boundary conditions at the inner and outer (assumed infinitely permeable) boundaries at r = Ri and r = Rs require that the azimuthal field vanish, or ∂ψ = 0, leading to:
∂θ
B1 = −Ri 2pA1 (57)
B3 = −R2pA3 (58) s
28

( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( )
( )
( )
( )
( ) (
At the magnet inner and outer radii, Hθ and Br must be continuous. These are:
1 ∂ψ Hθ = − (59)
r ∂θ ∂ψ
Br = µ0 − + Mr (60) ∂r
These become, at r = R1:
2pR−p−1−pA1 Rp−1 − R = −p A2R
p−1 + B2R−p−1 − p M0
(61) 1 i 1 1 1 1 − p2
2pR−p−1−pA1 Rp−1 + R = −p A2R
p−1 − B2R−p−1 − M0
+ M0 (62) 1 i 1 1 1 1 − p2
and at r = R2:
−pA3 Rp−1 − R2pR−p−1 = −p A2R
p−1 + B2R−p−1 − p M0
(63) 2 s 2 2 2 1 − p2
−pA3 Rp−1 + R2pR−p−1 = −p A2R
p−1 − B2R−p−1 − M0
+ M0 (64) 2 s 2 2 2 1 − p2
Some small-time manipulation of these yields:
A1 1 − R2pR−pRp = A2Rp
11 + B2R−p + R1
M0 (65) i 1 1 − p2
A1 1 + R2pR−pRp = A2Rp
11 − B2R−p + pR1
M0 (66) i 1 1 − p2
Rp = A2Rp
2A3 2 − R2pR−p 2 + B2R
−p + R2 M0
(67) s 2 1 − p2
A3 Rp = A2R
p 22 + R2pR−p
2 − B2R−p + pR2
M0 (68) s 2 1 − p2
Taking sums and differences of the first and second and then third and fourth of these we obtain:
2A1Rp = 2A2R
p 1 + p (69) 1 1 + R1M0
1 − p2
2A1Ri 2pR−p −2B2R
−p + R1M0 p − 1
= (70) 1 1 1 − p2
2A3Rp = 2A2R
p 1 + p (71) 2 2 + R2M0
1 − p2
2A3R2pR−p = −2B2R
−p + R2M0 p − 1
(72) s 2 2 1 − p2
and then multiplying through by appropriate factors (Rp and Rp 1) and then taking sums and 2
differences of these,
(A1 − A3)Rp
2 − R2Rp
1Rp = (R1R
p 1) M0 p + 1
(73) 2 2 1 − p2
A1Ri 2p − A3R
2p R−pR−p R1R−p − R2R
−p ) M0 p − 1
= (74) s 1 2 2 1 2 1 − p2
29

( ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
Dividing through by the appropriate groups:
pR1R2 −R2Rp 1 M0 1 + p
A1 −A3 = pR1Rp 2 1 − p2
(75) 2
−p −p
A1Ri 2p 2p R1R2 −R2R1 M0 p− 1
(76) −A3Rs = −p −p 2 1 − p2R1 R2
and then, by multiplying the top equation by R2p and subtracting: s
p −p −p
A1 R2p −Ri
2p ) R1R2 −R2R
p 1 M0 1 + p
R2p R1R2 −R2R1 M0 p− 1 (77) = −s p sR1R
p 2 1 − p2 −p −p 2 1 − p2 2 R1 R2
This is readily solved for the field coefficients A1 and A3:
M0 p+ 1 1−p 1−p R2p p− 1 1+p −R1A1 = − ( 2p −Ri
2p ) R1 −R2 + R2
1+p (78) s 2 Rs p2 − 1 p2 − 1
M0 1 1−p 1−p Ri 2p 1 1+p 1+pA3 = − ( −R2 − −R1 (79)
2p −Ri 2p )
1 − pR1 1 + p
R2 2 Rs
Now, noting that the scalar potential is, in region 1 (radii less than the magnet),
ψ = A1(rp −R2pr −p) cos pθ r < R1i
ψ = A3(rp −R2pr −p) cos pθ r > R2s
and noting that p(p+ 1)/(p2 − 1) = p/(p− 1) and p(p− 1)/(p2 − 1) = p/(p+ 1), magnetic field is:
r < R1 (80)
M0 p 1−p 1−p R2p p 1+p 1+p p−1 + Ri 2pr −p−1
) −R2 + −R1 r cos pθ s R2Hr = ( 2p −Ri
2p p− 1 R1
2 Rs p+ 1
r > R2 (81)
M0 p 1−p 1−p Ri 2p p 1+p 1+p
) −R2 + R2 −R1 rp−1 + R2pr −p−1 cos pθ Hr = ( 2p −Ri
2p p− 1 R1 p+ 1 s
2 Rs
The case of p = 1 appears to be a bit troublesome here, but is easily handled by noting that:
p 1−p 1−p R2lim R1 −R2 = log p→1 p− 1 R1
Now: there are a number of special cases to consider.For the iron-free case, Ri → 0 and R2 → ∞, this becomes, simply, for r < R1:
p 1−pHr = M0
R11−p rp−1 cos pθ (82) −R22 p− 1
30

( )
( ) ( ) ( )
( )
Note that for the case of p = 1, the limit of this is
M0 R2Hr = log cos θ
2 R1
and for r > R2:
M0 pRp+1 − Rp+1 −(p+1) cos pθ Hr =
2 p + 1 2 1 r
For the case of a machine with iron boundaries and windings in slots, we are interested in the fields at the boundaries. In such a case, usually, either Ri = R1 or Rs = R2. The fields are: at the outer boundary: r = Rs:
Rp−1 pRp+1 − Rp+1 +
pRi
2p 1−p 1−pHr = M0 2ps − R2 cos pθ 2 1
Rs − Ri 2p p + 1 p − 1
R1
or at the inner boundary: r = Ri:
Rp−1 ( ) ( )
Hr = M0 2pi p
Rp+1 − Rp+1 pR2p 1−p − R2 cos pθ 2 1
Rs − Ri 2p p + 1
+ p − 1 s R1
1−p
31

Massachusetts Institute of TechnologyDepartment of Electrical Engineering and Computer Science
6.685 Electric Machinery
Class Notes 8: Analytic Design Evaluation of Induction Machines
January 12, 2006c©2005 James L. Kirtley Jr.
1 Introduction
Induction machines are perhaps the most widely used of all electric motors. They are generallysimple to build and rugged, offer reasonable asynchronous performance: a manageable torque-speedcurve, stable operation under load, and generally satisfactory efficiency. Because they are so widelyused, they are worth understanding.
In addition to their current economic importance, induction motors and generators may findapplication in some new applications with designs that are not similar to motors currently incommerce. An example is very high speed motors for gas compressors, perhaps with squirrel cagerotors, perhaps with solid iron (or perhaps with both).
Because it is possible that future, high performance induction machines will be required tohave characteristics different from those of existing machines, it is necessary to understand themfrom first principles, and that is the objective of this document. It starts with a circuit theoreticalview of the induction machine. This analysis is strictly appropriate only for wound-rotor machines,but leads to an understanding of more complex machines. This model will be used to explain thebasic operation of induction machines. Then we will derive a model for squirrel-cage machines.Finally, we will show how models for solid rotor and mixed solid rotor/squirrel cage machines canbe constructed.
The view that we will take in this document is relentlessly classical. All of the elements thatwe will use are calculated from first principles, and we do not resort to numerical analysis orempirical methods unless we have no choice. While this may seem to be seriously limiting, it servesour basic objective here, which is to achieve an understanding of how these machines work. It isour feeling that once that understanding exists, it will be possible to employ more sophisticatedmethods of analysis to get more accurate results for those elements of the machines which do notlend themselves to simple analysis.
An elementary picture of the induction machine is shown in Figure 1. The rotor and stator arecoaxial. The stator has a polyphase winding in slots. The rotor has either a winding or a cage, alsoin slots. This picture will be modified slightly when we get to talking of “solid rotor” machines,anon. Generally, this analysis is carried out assuming three phases. As with many systems, thisgeneralizes to different numbers of phases with little difficulty.
2 Induction Motor Transformer Model
The induction machine has two electrically active elements: a rotor and a stator. In normaloperation, the stator is excited by alternating voltage. (We consider here only polyphase machines).The stator excitation creates a magnetic field in the form of a rotating, or traveling wave, whichinduces currents in the circuits of the rotor. Those currents, in turn, interact with the traveling
1

Stator Core Stator Winding in Slots
Rotor Winding or Cage in Slots
Rotor
Air−Gap
Figure 1: Axial View of an Induction Machine
wave to produce torque. To start the analysis of this machine, assume that both the rotor and the stator can be described by balanced, three – phase windings. The two sets are, of course, coupled by mutual inductances which are dependent on rotor position. Stator fluxes are (λa, λb, λc) and rotor fluxes are (λA, λB , λC). The flux vs. current relationship is given by:
λa ia
λb ib
LS M SR λc ic = (1) λA iA
M T
SR LR λB iB
λC iC
where the component matrices are:
La Lab Lab
L = Lab La Lab (2)
S Lab Lab La
LA LAB LAB
L = LAB LA LAB (3)
R LAB LAB LA
The mutual inductance part of (1) is a circulant matrix:
2πM cos(pθ) M cos(pθ + 3 ) M cos(pθ − 2
3 π )
M = M cos(pθ − 2
3 π ) M cos(pθ) M cos(pθ + 23
π ) (4)
SR 2πM cos(pθ + 23
π ) M cos(pθ − 3 ) M cos(pθ)
2

To carry the analysis further, it is necessary to make some assumptions regarding operation. To start, assume balanced currents in both the stator and rotor:
ia = IS cos(ωt)ib = IS cos(ωt − 2
3 π ) (5)
ic = IS cos(ωt + 23 π )
iA = IR cos(ωRt + ξR)iB = IR cos(ωRt + ξR − 2
3 π ) (6)
iC = IR cos(ωRt + ξR + 23 π )
The rotor position θ can be described by
θ = ωmt + θ0 (7)
Under these assumptions, we may calculate the form of stator fluxes. As it turns out, we need only write out the expressions for λa and λA to see what is going on:
λa = (La − Lab)Is cos(ωt) + MIR(cos(ωRt + ξR) cos p(ωm + θ0) (8)
2π 2π 2π 2π + cos(ωRt + ξR + ) cos(p(ωmt + θ0) − ) + cos(ωRt + ξR − ) cos(p(ωmt + θ0) + )
3 3 3
which, after reducing some of the trig expressions, becomes:
3 λa = (La − Lab)Is cos(ωt) + MIR cos((pωm + ωR)t + ξR + pθ0) (9)
2
Doing the same thing for the rotor phase A yields:
2π 2π λA = MIs(cos p(ωmt + θ0) cos(ωt)) + cos(p(ωmt + θ0) − ) cos(ωt − ) (10)
3 3 2π 2π
+ cos(p(ωmt + θ0) + ) cos(ωt + ) + (LA − LAB)IR cos(ωRt + ξR)3 3
This last expression is, after manipulating:
3λA = MIs cos((ω − pωm)t − pθ0) + (LA − LAB)IR cos(ωRt + ξR) (11)
2
These two expressions, 9 and 11 give expressions for fluxes in the armature and rotor windings in terms of currents in the same two windings, assuming that both current distributions are sinusoidal in time and space and represent balanced distributions. The next step is to make another assumption, that the stator and rotor frequencies match through rotor rotation. That is:
ω − pωm = ωR (12)
It is important to keep straight the different frequencies here:
ω is stator electrical frequency ωR is rotor electrical frequency ωm is mechanical rotation speed
3
3

[ ] [ ] [ ]
so that pωm is electrical rotation speed. To refer rotor quantities to the stator frame (i.e. non- rotating), and to work in complex
amplitudes, the following definitions are made:
jωt)λa = Re(Λae (13)
λA = Re(ΛAejωRt) (14)
jωt)ia = Re(I e (15) a
iA = Re(IAejωRt) (16)
With these definitions, the complex amplitudes embodied in 56 and 64 become:
Λ = LSIa +3 MIAe
j(ξR+pθ0) (17) a 2
ΛA =3 MI e −jpθ0 + LRIAe
jξR (18) 2 a
There are two phase angles embedded in these expressions: θ0 which describes the rotor physical phase angle with respect to stator current and ξR which describes phase angle of rotor currents with respect to stator currents. We hereby invent two new rotor variables:
ΛAR = ΛAejpθ) (19)
= IAej(pθ0+ξR) (20) IAR
These are rotor flux and current referred to armature phase angle. Note that ΛAR and IAR
have the same phase relationship to each other as do ΛA and IA. Using 19 and 20 in 17 and 18, the basic flux/current relationship for the induction machine becomes:
3Λa LS 2 M Ia = 3 (21) ΛAR 2 M LR IAR
This is an equivalent single- phase statement, describing the flux/current relationship in phase a, assuming balanced operation. The same expression will describe phases b and c.
Voltage at the terminals of the stator and rotor (possibly equivalent) windings is, then:
V = jωΛ + RaIa (22) a a
= jωRΛAR + RAIAR (23) V AR
or: 3
V = jωLSI + jω MIAR + RaI (24) a a 2 a
3 = jωR MIa + jωRLRIAR + RAIAR (25) V AR 2
To carry this further, it is necessary to go a little deeper into the machine’s parameters. Note that LS and LR are synchronous inductances for the stator and rotor. These may be separated into space fundamental and “leakage” components as follows:
4

l
3 4 µ0RlN 2k2
LS = La − Lab = S S + LSl (26) p22 π g
3 4 µ0RlN 2 k2
LR = LA − LAB = p2
R R + LRl (27) 2 π g
Where the normal set of machine parameters holds:
R is rotor radius is active length
g is the effective air- gapp is the number of pole- pairsN represents number of turnsk represents the winding factorS as a subscript refers to the statorR as a subscript refers to the rotorLl is “leakage” inductance
The two leakage terms LSl and LRl contain higher order harmonic stator and rotor inductances, slot inducances, end- winding inductances and, if necessary, a provision for rotor skew. Essentially, they are used to represent all flux in the rotor and stator that is not mutually coupled.
In the same terms, the stator- to- rotor mutual inductance, which is taken to comprise only a space fundamental term, is:
4 µ0RlNSNRkSkRM = (28)
p2π g
Note that there are, of course, space harmonic mutual flux linkages. If they were to be included, they would hair up the analysis substantially. We ignore them here and note that they do have an effect on machine behavior, but that effect is second- order.
Air- gap permeance is defined as:
4 µ0Rl ℘ag = (29)
p2π g
so that the inductances are:
3 SN 2LS = ℘agk2
S + LSl (30) 2
3 RN 2LR = ℘agk2
R + LRl (31) 2
M = ℘agNSNRkSkR (32)
Here we define “slip” s by:
ωR = sω (33)
5

( )
( )
(
(
so that
pωm s = 1 − (34)
ω Then the voltage balance equations become:
3 SN
2V = jω ℘agk2
S + LSl I + jω 3 ℘agNSNRkSkRIAR + RaI (35) a a2 a 2
3 3 RN
2V AR = jsω ℘agNSNRkSkRIa + jsω ℘agk2
R + LRl IAR + RAIAR (36) 2 2
At this point, we are ready to define rotor current referred to the stator. This is done by assuming an effective turns ratio which, in turn, defines an equivalent stator current to produce the same fundamental MMF as a given rotor current:
NRkRI2 = (37) IAR NSkS
Now, if we assume that the rotor of the machine is shorted so that V AR = 0 and do some manipulation we obtain:
V = j(XM + X1)I + jXM I2 + RaI (38) a a a
R20 = jXM I + j(XM + X2)I2 + I2 (39) a s
where the following definitions have been made:
3 XM = ω℘agN
2 Sk
2 (40) 2 S
X1 = ωLSl (41)
NSkS )2
X2 = ωLRl (42) NRkR
NSkS )2
R2 = RA (43) NRkR
These expressions describe a simple equivalent circuit for the induction motor shown in Figure 2. We will amplify on this equivalent circuit anon.
6

3
Ia Ra X1 X2 I2 ∧ ∧ ∧ ∨ ∨
∩∩∩∩ ∩∩∩∩
⊃⊃⊃⊃Xm
< < <
> >
R2
s
Figure 2: Equivalent Circuit
Operation: Energy Balance
Now we are ready to see how the induction machine actually works. Assume for the moment that Figure 2 represents one phase of a polyphase system and that the machine is operated under balanced conditions and that speed is constant or varying only slowly. “Balanced conditions” means that each phase has the same terminal voltage magnitude and that the phase difference between phases is a uniform. Under those conditions, we may analyze each phase separately (as if it were a single phase system). Assume an RMS voltage magnitude of Vt across each phase.
The “gap impedance”, or the impedance looking to the right from the right-most terminal of X1 is:
R2Zg = jXm (jX2 + ) (44)||
s A total, or terminal impedance is then
Zt = jX1 + Ra + Zg (45)
and terminal current is Vt
It = (46)Zt
Rotor current is found by using a current divider:
jXmI2 = It R2
(47)jX2 +
s + jXm
“Air-gap” power is then calculated (assuming a three-phase machine):
2 R2Pag = 3 I2 (48)| |
s
This is real (time-average) power crossing the air-gap of the machine. Positive slip implies rotor speed less than synchronous and positive air-gap power (motor operation). Negative slip means rotor speed is higher than synchronous, negative air-gap power (from the rotor to the stator) and generator operation.
Now, note that this equivalent circuit represents a real physical structure, so it should be possible to calculate power dissipated in the physical rotor resistance, and that is:
Ps = Pags (49)
7

( )
( )
(Note that, since both Pag and s will always have the same sign, dissipated power is positive.) The rest of this discussion is framed in terms of motor operation, but the conversion to generator
operation is simple. The difference between power crossing the air-gap and power dissipated in the rotor resistance must be converted from mechanical form:
Pm = Pag − Ps (50)
and electrical input power is: Pin = Pag + Pa (51)
where armature dissipation is: Pa = 3 It|2Ra (52) |
Output (mechanical) power is Pout = Pag − Pw (53)
Where Pw describes friction, windage and certain stray losses which we will discuss later. And, finally, efficiency and power factor are:
Pout η = Pin
(54)
cos ψ = Pin 3VtIt
(55)
3.1 Example of Operation
The following MATLAB script generates a torque-speed and power-speed curve for the simple induction motor model described above. Note that, while the analysis does not require that any of the parameters, such as rotor resistance, be independent of rotor speed, this simple script does assume that all parameters are constant.
3.2 Example
That MATLAB script has been run for a standard motor with parameters given in Table 1. Torque vs. speed and power vs. speed are plotted for this motor in Figure 3. These curves were
generated by the MATLAB script shown above.
4 Squirrel Cage Machine Model
Now we derive a circuit model for the squirrel-cage motor using field analytical techniques. The model consists of two major parts. The first of these is a description of stator flux in terms of stator and rotor currents. The second is a description of rotor current in terms of air- gap flux. The result of all of this is a set of expressions for the elements of the circuit model for the induction machine.
To start, assume that the rotor is symmetrical enough to carry a surface current, the fundamental of which is:
′
= ızRe Krej(sωt−pφ )Kr
= ızRe Krej(ωt−pφ) (56)
8

% -----------------------------------------------------% Torque-Speed Curve for an Induction Motor% Assumes the classical model% This is a single-circuit model% Required parameters are R1, X1, X2, R2, Xm, Vt, Ns% Assumed is a three-phase motor% This thing does a motoring, full speed range curve% Copyright 1994 James L. Kirtley Jr.% ------------------------------------------------------s = .002:.002:1; % vector of slip
N = Ns .* (1 - s); % Speed, in RPM
oms = 2*pi*Ns/60; % Synchronous speed
Rr = R2 ./ s; % Rotor resistance
Zr = j*X2 + Rr; % Total rotor impedance
Za = par(j*Xm, Zr); % Air-gap impedance
Zt = R1 + j*X1 +Za; % Terminal impedance
Ia = Vt ./ Zt; % Terminal Current
I2 = Ia .* cdiv (Zr, j*Xm); % Rotor Current
Pag = 3 .* abs(I2) .^2 .* Rr; % Air-Gap Power
Pm = Pag .* (1 - s); % Converted Power
Trq = Pag ./ oms; % Developed Torque
subplot(2,1,1)
plot(N, Trq)
title(’Induction Motor’);
ylabel(’N-m’);
subplot(2,1,2)
plot(N, Pm);
ylabel(’Watts’);
xlabel(’RPM’);
Table 1: Example, Standard Motor
Rating 300 kw Voltage 440 VRMS, l-l
254 VRMS, l-n Stator Resistance R1 .73 Ω Rotor Resistance R2 .64 Ω Stator Reactance X1 .06 Ω Rotor Reactance X2 .06 Ω Magnetizing Reactance Xm 2.5 Ω Synchronous Speed Ns 1200 RPM
9

( )
Induction Motor 300
250
200
Wat
ts
N−
m150
100
50
00 200 400 600 800 1000 1200
4x 10
3
2.5
2
1.5
1
0.5
00 200 400 600 800 1000 1200
RPM
Figure 3: Torque and Power vs. Speed for Example Motor
Note that in 56 we have made use of the simple transformation between rotor and stator coordinates:
′ φ = φ − ωmt (57)
and that pωm = ω − ωr = ω(1 − s) (58)
Here, we have used the following symbols:
K is complex amplitude of rotor surface current r
s is per- unit “slip” ω is stator electrical frequency ωr is rotor electrical frequency ωm is rotational speed
The rotor current will produce an air- gap flux density of the form:
Br = Re B ej(ωt−pφ) (59) r
where R
B = −jµ0 K (60) r r pg
10

( )
( )
Note that this describes only radial magnetic flux density produced by the space fundamental of rotor current. Flux linked by the armature winding due to this flux density is:
∫ 0
λAR = lNSkS Br(φ)Rdφ (61) −
This yields a complex amplitude for λAR:
πp
ΛARejωt λAR = Re (62)
where 2lµ0R
2NSkS = K (63) rΛAR p2g
Adding this to flux produced by the stator currents, we have an expression for total stator flux:
3 4 µ0N 2Rlk2 2lµ0R2NSkSSΛa =
p2S + LSl Ia +
p2K (64)
2 π g g r
Expression 64 motivates a definiton of an equivalent rotor current I2 in terms of the space fundamental of rotor surface current density:
π R I2 = K (65)
3 NSkSz
Then we have the simple expression for stator flux:
Λ = (Lad + LSl)Ia + LadI2 (66) a
where Lad is the fundamental space harmonic component of stator inductance:
3 4 µ0N 2k2 Rl Lad =
pS2
S (67) 2 π g
4.1 Effective Air-Gap: Carter’s Coefficient
In induction motors, where the air-gap is usually quite small, it is necessary to correct the air-gap permeance for the effect of slot openings. These make the permeance of the air-gap slightly smaller than calculated from the physical gap, effectively making the gap a bit bigger. The ratio of effective to physical gap is:
t + s = g (68) geff t + s − gf (α)
where ( ) s
f (α) = f 2g
= α tan(α) − log sec α (69)
11

( )
( ∑
4.2 Squirrel Cage Currents
The second part of this derivation is the equivalent of finding a relationship between rotor flux and I2. However, since this machine has no discrete windings, we must focus on the individual rotor bars.
Assume that there are NR slots in the rotor. Each of these slots is carrying some current. If the machine is symmetrical and operating with balanced currents, we may write an expression for current in the kth slot as:
Ikejsωt ik = Re (70)
where
−j2πp
Ik = Ie NR (71)
and I is the complex amplitude of current in slot number zero. Expression 71 shows a uniform progression of rotor current phase about the rotor. All rotor slots carry the same current, but that current is phase retarded (delayed) from slot to slot because of relative rotation of the current wave at slip frequency.
The rotor current density can then be expressed as a sum of impulses:
NR−1
j(ωrt−k2πp
′ Kz = Re ∑ 1
Ie NR )δ(φ
2πk ) (72)
R − NRk=0
The unit impulse function δ() is our way of approximating the rotor current as a series of impulsive currents around the rotor.
This rotor surface current may be expressed as a fourier series of traveling waves:
∞ )
′
Kz = Re K ej(ωrt−npφ ) (73) nn=−∞
Note that in 73, we are allowing for negative values of the space harmonic index n to allow for reverse- rotating waves. This is really part of an expansion in both time and space, although we are considering only the time fundamental part. We may recover the nth space harmonic component of 73 by employing the following formula:
1 ∫ 2π
K =< Kr(φ, t)e −j(ωr t−npφ)dφ > (74) n π 0
Here the brackets <> denote time average and are here beause of the two- dimensional nature of the expansion. To carry out 74 on 72, first expand 72 into its complex conjugate parts:
NR−1
∗ j(ωrt−k
2πp −j(ωrt−k
2πp I ) 2πk ′ Kr =
1 ∑ Ie NR
) + e NR δ(φ ) (75)
2 R R − NRk=0
If 75 is used in 74, the second half of 75 results in a sum of terms which time average to zero. The first half of the expression results in:
12

( )
( )
( )
I ∫ 2π NR−1
−j2πpk ∑ 2πk jnpφδ(φ −K = e NR e )dφ (76) n 2πR 0 NRk=0
The impulse function turns the integral into an evaluation of the rest of the integrand at the impulse. What remains is the sum:
NR−1 ∑ j(n−1) 2πkp I
K = e NR (77) n 2πR k=0
The sum in 77 is easily evaluated. It is:
NR−1 ∑ j
2πkp(n−1) NR if (n − 1) P = integer e NR = NR (78)
0 otherwise k=0
The integer in 78 may be positive, negative or zero. As it turns out, only the first three of these (zero, plus and minus one) are important, because these produce the largest magnetic fields and therefore fluxes. These are:
(n − 1) p
= −1 or n = NR−p pNR
− = 0 or n = 1
= 1 or n = NR+p (79) p
Note that 79 appears to produce space harmonic orders that may be of non- integer order. This is not really true: is is necessary that np be an integer, and 79 will always satisfy that condition.
So, the harmonic orders of interest to us are one and
NR n+ = + 1 (80)
p NR
n− = − 1 (81) − p
Each of the space harmonics of the squirrel- cage current will produce radial flux density. A surface current of the form:
′
Kn = Re NRI
ej(ωrt−npφ ) (82) 2πR
produces radial magnetic flux density:
′
Brn = Re Brnej(ωrt−npφ ) (83)
where
µ0NRI B = −j
2πnpg (84) rn
In turn, each of the components of radial flux density will produce a component of induced voltage. To calculate that, we must invoke Faraday’s law:
13

( )
( )
[ ( )]
∂B (85) ∇× E = −
∂tThe radial component of 85, assuming that the fields do not vary with z, is:
1 ∂ ∂BrEz = (86)
R ∂φ −∂t
Or, assuming an electric field component of the form:
Ezn = Re E ej(ωrt−npφ) (87) n
Using 84 and 87 in 86, we obtain an expression for electric field induced by components of air-gap flux:
ωrR E = B (88) n n np
µ0NRωrR E = −j I (89) n 2πg(np)2
Now, the total voltage induced in a slot pushes current through the conductors in that slot. We may express this by:
= ZslotI (90) E1 + En− + En+
Now: in 90, there are three components of air- gap field. E1 is the space fundamental field, produced by the space fundamental of rotor current as well as by the space fundamental of stator current. The other two components on the left of 90 are produced only by rotor currents and actually represent additional reactive impedance to the rotor. This is often called zigzag leakage inductance. The parameter Zslot represents impedance of the slot itself: resistance and reactance associated with cross- slot magnetic fields. Then 90 can be re-written as:
µ0NRωrR 1 1 E1 = ZslotI + j
2πg (n+p)2 + I (91)
(n−p)2
To finish this model, it is necessary to translate 91 back to the stator. See that 65 and 77 make the link between I and I2:
NRI2 = I (92)
6NSkS
Then the electric field at the surface of the rotor is:
6NSkS 3 µ0NSkSR 1 1 E1 = Zslot + jωr
π g + (93)
NR (n+p)2 (n−p)2 I2
This must be translated into an equivalent stator voltage. To do so, we use 88 to translate 93 into a statement of radial magnetic field, then find the flux liked and hence stator voltage from that. Magnetic flux density is:
14

( )
( )
( )
pE1B = r ωrR [ ( ) ( )] 6NSkSp Rslot 3 µ0NSkSp 1 1
+ (94) = NRR ωr
+ jLslot + jπ g (n+p)2 (n−p)2
I2
where the slot impedance has been expressed by its real and imaginary parts:
Zslot = Rslot + jωrLslot (95)
Flux linking the armature winding is:
∫ 0
λag = NSkSlR Re B ej(ωt−pφ) dφ (96) r−
π 2p
Which becomes: λag = Re Λ ejωt (97) ag
where:
2NSkSlR Λ = j B (98) ag r p
Then “air- gap” voltage is:
2ωNSkSlR V ag = jωΛag = −
p Br
[ ]
= −I2 12lN 2
Sk2 S
NR
(
jωLslot + R2
s
)
+ jω 6
π µ0RlN 2
Sk2 S
g
( 1
(n+p)2 +
1
(n−p)2
)
(99)
Expression 99 describes the relationship between the space fundamental air- gap voltage V ag
and rotor current I2. This expression fits the equivalent circuit of Figure 4 if the definitions made below hold:
X2 I2 ∩∩∩∩ < > R2< > s<
Figure 4: Rotor Equivalent Circuit
12lN 2k2 6 µ0RlN 2k2 1 1S S + (100) X2 = ω S S Lslot + ωπ g (NR + p)2 (NR − p)2
12lN 2k2
NR
R2 = S S Rslot (101) NR
15

( )
( )
The first term in 100 expresses slot leakage inductance for the rotor. Similarly, 101 expresses rotor resistance in terms of slot resistance. Note that Lslot and Rslot are both expressed per unit length. The second term in 100 expresses the “zigzag” leakage inductance resulting from harmonics on the order of rotor slot pitch.
Next, see that armature flux is just equal to air- gap flux plus armature leakage inductance. That is, 66 could be written as:
Λ = Λag + LalIa (102) a
4.3 Stator Leakage
There are a number of components of stator leakage Lal, each representing flux paths that do not directly involve the rotor. Each of the components adds to the leakage inductance. The most prominent components of stator leakage are referred to as slot, belt, zigzag, end winding, and skew. Each of these will be discussed in the following paragraphs.
4.3.1 Belt Leakage
Belt and zigzag leakage components are due to air- gap space harmonics. As it turns out, these are relatively complicated to estimate, but we may get some notion from our first- order view of the machine. The trouble with estimating these leakage components is that they are not really independent of the rotor, even though we call them “leakage”. Belt harmonics are of order n = 5 and n = 7. If there were no rotor coupling, the belt harmonic leakage terms would be:
3 4 µ0N 2k2 5Rl Xag5 = ω S (103)
22 π 52p g
3 4 µ0N 2k2 7Rl Xag7 = ω S (104)
22 π 72p g
The belt harmonics link to the rotor, however, and actually appear to be in parallel with components of rotor impedance appropriate to 5p and 7p pole- pair machines. At these harmonic orders we can usually ignore rotor resistance so that rotor impedance is purely inductive. Those components are:
12lN 2k2 6 µ0RlN 2k2 1 1S 5 + (105) X2,5 = ω S 5 Lslot + ωπ g (NR + 5p)2 (NR − 5p)2NR
12lN 2k2 6 µ0RlN 2k2 1 1S 7 + (106) X2,7 = ω S 7 Lslot + ωπ g (NR + 7p)2 (NR − 7p)2
In the simple model of the squirrel cage machine, because the rotor resistances are relatively small and slip high, the effect of rotor resistance is usually ignored. Then the fifth and seventh harmonic components of belt leakage are:
NR
X5 = Xag5‖X2,5 (107)
X7 = Xag7‖X2,7 (108)
16

( )
∫ ∫
(
4.3.2 Zigzag Leakage
Stator zigzag leakage is from those harmonics of the orders pns = Nslots ± p where Nslots.
3 4 µ0N 2Rl kns+ kns−Xz = ω S + 2 π g (Nslots + p)2 (Nslots − p)2
(109)
Note that these harmonic orders do not tend to be shorted out by the rotor cage and so no direct interaction with the cage is ordinarily accounted for.
4.3.3 Skew Leakage
In order to reduce saliency effects that occur because the rotor teeth will tend to try to align with the stator teeth, induction motor designers always use a different number of slots in the rotor and stator. There still may be some tendency to align, and this produces “cogging” torques which in turn produce vibration and noise and, in severe cases, can retard or even prevent starting. To reduce this tendency to “cog”, rotors are often built with a little “skew”, or twist of the slots from one end to the other. Thus, when one tooth is aligned at one end of the machine, it is un-aligned at the other end. A side effect of this is to reduce the stator and rotor coupling by just a little, and this produces leakage reactance. This is fairly easy to estimate. Consider, for example, a space-fundamental flux density Br = B1 cos pθ, linking a (possibly) skewed full-pitch current path:
l 2
−l 2
π 2
π 2
p
− p
xl
ςp
+
λ = B1 cos pθRdθdx + x
l ςp
Here, the skew in the rotor is ς electrical radians from one end of the machine to the other. Evaluation of this yields:
2B1Rl sin ς λ = ς
2
p 2
Now, the difference between what would have been linked by a non-skewed rotor and what is linked by the skewed rotor is the skew leakage flux, now expressible as:
sin ς
)2
Xk = Xag 1 − 2
ς 2
4.3.4 Stator Slot Leakage
Currents in the stator slots produce fluxes that link the stator conductors but not the rotor. To estimate these fluxes, refer to the slot geometry shown in Figure 4.3.4. This shows a possibly unrealistic straight-sided stator slot. Typical in induction machines is for such slots to be trapezoidal in shape. A more careful field analysis than we will do here shows that this analysis will be no more than a few percent in error if the slot width used in the calculation is the slot top (the end of the slot closest to the air-gap).
There are five important dimensions here: the slot height h, width w and the slot depression height d and width u, and (not shown) length ℓ. To estimate slot leakage inductance we assume some current in the slot, calculate the magnetic energy that results and then use the expression:
17

( )
( )
1 wm = LℓI
2
2
If there are N conductors in the slot, each carrying current I, the current density in the slot is:
N I J =
hw
Using Ampere’s Law around a loop (shown dotted in the figure), magnetic field in the x direction at height y from the bottom of the slot is:
N I yHx = −
w h
In the slot depression that field is: N I
Hxd = − u
Magnetic energy stored in the slot and slot depression are then conveniently calculated as:
wm = 1
2 LℓI
2 = wℓ ∫ h
0
1
2µ0H
2 xdy + udℓ
1
2 H2
xd = ℓµ0
( 1
3
h w
+ d u
)
N 2I2
Noting the slot permeance as: (
1 h d )
P = ℓµ0 3 w
+ u
We have the total inductance of the slot to be:
Lℓ = PN 2
For the purpose of this estimate we will assume an ordinary winding consisting of coils of Nc
turns each. For such a winding if there are m slots per pole per phase and p pole pairs and if the winding is short-pitched by Nsp slots, there will be 2p(m −Nsp) slots per phase with two coils from the same phase and 2pNsp slots per phase sharing another phase. (We assume here a three phase machine). Then the ’self’ slot leakage inductance must be:
Lsℓ = P 4Nc 22p(m −Nsp) + Nc
22pNsp
Since there are a total of pNsp ’mutual’ slots between each pair of phases, and the sense of the windings is opposite, the mutual component of slot leakage is:
Lmℓ = −PpNspNc 2
Total slot leakage is then:
Lℓ = Lsℓ − Lmℓ = PpN c 2 (8m − 5Nsp)
Expressed in terms of the total number of stator turns, Na = 2pmNc,
N 2 2 5 Nsp
2Lℓ = P
p a
m −
4 m
18

y
h
du
w
J
x
Figure 5: Stator Slot Geometry for Leakage Calculation
4.3.5 End Winding Leakage
The final component of leakage reactance is due to the end windings. This is perhaps the mostdifficult of the machine parameters to estimate, being essentially three-dimensional in nature. Thereare a number of ways of estimating this parameter, but for our purposes we will use a simplifiedparameter from Alger[1]:
Xe =14
4π2
q
2
µ0RN2a
p2(p− 0.3)
As with all such formulae, extreme care is required here, since we can give little guidance as towhen this expression is correct or even close. And we will admit that a more complete treatmentof this element of machine parameter construction would be an improvement.
4.4 Stator Winding Resistance
Estimating stator winding resistance is fairly straightforward once end winding geometry is known.Total length of the armature winding is, per phase:
ℓw = Na2 (ℓ+ ℓe)
Estimating ℓe, the length of one end winding, requires knowing how the winding is laid out andis beyond our scope here. (But once you see it you will know that length.)
The area of the winding may be estimated by knowing wire diameter and how many strandsare in parallel:
Aw =π
4d2
wNinh
The area of the winding is related to slot area by a winding factor:
λa =2NcAw
Aslot
19

Winding resistance, per phase, is simply
ℓwRa =
σAw
where σ is wire conductivity. Note that conductivity of the materials used in induction machines is a function of temperature and so will be winding resistance (and rotor resistance for that matter).
The Fitzgerald, Kingsley and Umans textbook[2] gives the following correction for resistance of copper:
T0 + T RT = Rt
T0 + t
where RT and Rt are resistances at temperatures T and t. T0 = 234.5 for copper with basic conductivity of IACS (5.8 × 107S/m)[3]. For aluminum with conductivity of 63% of IACS, T0 ≈212.9 Temperatures are given in Celcius.
4.5 Harmonic Order Rotor Resistance and Stray Load Losses
It is important to recognize that the machine rotor “sees” each of the stator harmonics in essentially the same way, and it is quite straightforward to estimate rotor parameters for the harmonic orders, as we have done just above. Now, particularly for the “belt” harmonic orders, there are rotor currents flowing in response to stator mmf’s at fifth and seventh space harmonic order. The resistances attributable to these harmonic orders are:
12lN 2k2
R2,5 = s 5 (110) Rslot,5 NR
12lN 2k2
R2,7 = s 7 (111) Rslot,7 NR
The higher-order slot harmonics will have relative frequencies (slips) that are:
n = 6k + 1 sn = 1 ∓ (1 − s)n
n = 6k − 1 k an integer (112)
The induction motor electromagnetic interaction can now be described by an augmented magnetic circuit as shown in Figure 20. Note that the terminal flux of the machine is the sum of all of the harmonic fluxes, and each space harmonic is excited by the same current so the individual harmonic components are in series.
Each of the space harmonics will have an electromagnetic interaction similar to the fundamental: power transferred across the air-gap is:
Pem,n = 3I2 R2,n 2,n sn
Of course dissipation in each circuit is:
Pd,n = 3I22 ,nR2,n
20

(
leaving
Pm,n = 3I2 R2,n (1 − sn)2,n sn
Note that this equivalent circuit has provision for two sets of circuits which look like “cages”. In fact one of these sets is for the solid rotor body if that exists. We will discuss that anon. There is also a provision (rc) for loss in the stator core iron.
Power deposited in the rotor harmonic resistance elements is characterized as “stray load” loss because it is not easily computed from the simple machine equivalent circuit.
4.6 Slot Models
Some of the more interesting things that can be done with induction motors have to do with the shaping of rotor slots to achieve particular frequency-dependent effects. We will consider here three cases, but there are many other possibilities.
First, suppose the rotor slots are representable as being rectangular, as shown in Figure 6, and assume that the slot dimensions are such that diffusion effects are not important so that current in the slot conductor is approximately uniform. In that case, the slot resistance and inductance per unit length are:
1 = (113) Rslot wshsσ
hs = µ0 (114) Lslot 3ws
The slot resistance is obvious, the slot inductance may be estimated by recognizing that if the current in the slot is uniform, magnetic field crossing the slot must be:
I x Hy =
ws hs
Then energy stored in the field in the slot is simply:
1 ∫ hs µ0 Ix
)2 1 µ0hs I2 = ws dx =
2 LslotI
2
0 2 wshs 6 ws
4.7 Deep Slots
Now, suppose the slot is not small enough that diffusion effects can be ignored. The slot becomes “deep” to the extent that its depth is less than (or even comparable to) the skin depth for conduction at slip frequency. Conduction in this case may be represented by using the Diffusion Equation:
∂H ∇2H = µ0σ ∂t
In the steady state, and assuming that only cross-slot flux (in the y direction) is important, and the only variation that is important is in the radial (x) direction:
∂2Hy = jωsµ0σHy
∂x2
21

√
wd
hd xhs
y
ws
Figure 6: Single Slot
This is solved by solutions of the form:
Hy = H±e ±(1+j)
where the skin depth is
2 δ =
ωsµ0σ
xδ
Since Hy must vanish at the bottom of the slot, it must take the form:
sinh(1 + j)x δ hsinh(1 + j) s
δ
Hy = Htop
Since current is the curl of magnetic field,
s
δ s
δ
∂Hy 1 + j cosh(1 + j)h
Jz = σEz = = Htop ∂x sinh(1 + j)hδ
Then slot impedance, per unit length, is:
1 1 + j hs = coth(1 + j)Zslot ws σδ δ
Of course the impedance (purely reactive) due to the slot depression must be added to this. It is possible to extract the real and imaginary parts of this impedance (the process is algebraically a bit messy) to yield:
1 =Rslot wsσδ
s
δ s
δ hcos 2s −
δ
s
δsinh 2h + sin 2h
cosh 2h
hd 1 1 = µ0 +Lslot wd ωs wsσδ
22
s
δ hsin 2s −
δhcos 2s −
δ
sinh 2h
cosh 2h s
δ

4.8 Arbitrary Slot Shape Model
It is possible to obtain a better model of the behavior of rotor conductor slots by using simple numerical methods. In many cases rotor slots are shaped with the following objectives in mind:
1. A substantial part of the periphery of the rotor should be devoted to active conductor, for good running performance.
2. The magnetic iron of the rotor must occupy a certain fraction of the periphery, to avoid saturation.
3. For good starting performance, some means of forcing current to flow only in the top part of the rotor bar should be devised.
Generally the rotor teeth, which make up part of the machine’s magnetic circuit, are of roughly constant width to avoid flux concentration. The rotor conductor bars are therefore tapered, with their narrow ends towards the center of the rotor. To provide for current concentration on starting they often have a ’starting bar’ at the outer periphery of the rotor with a much narrower region which has high inductance just below. The bulk of the rotor bar occupies the tapered region allowed between the teeth.
This geometry is quite a bit more complicated than that described in the previous section. Note that, if we can describe the slot impedance per unit length as a function of frequency: Zs(ω) = Rs(ω) + jXs(ω), we can carry out the analysis of the machine as described previously. Thus our analysis is directed toward frequency response modeling of the rotor slot. Focusing then on a single slot, use the notation as described in Figure 7.
w[n]
Δ x
Δ x
E [n]z
x
y z
x = n
zE [n−1]
Figure 7: Slot Geometry Notation
The impedance per unit length is the ratio between slot current and axial electric field:
EZs = z
I
For the purpose of this analysis we will use the symbol x as the radial distance from the bottom of the slot. Assume the slot can be divided radially into a number of regions or ’slices’, each with
23

( )
radial height Δx. We further assume that currents are axially (z) directed and that magnetic field crosses the slot in the y direction. Under these assumptions the electric field at the top of one of the slices is related to the electric field at the bottom of the slice by magnetic field crossing through the slice. Using the trapezoidal rule for integration:
Δx Ez(x) − Ez(x − Δx) = jωµ0 Hy(x) + Hy(x − Δx)
2
The magnetic field is simply:
x 1 ∑ Hy(x) = σw(x)Ez(x)dx = nI
1 ∫
w(x) 0 wnn
i=1
where In is the total current flowing in one slice. Note that this can be reformulated into a ladder network by again using the trapezoidal rule for integration: current flowing in slice number n would be:
Δx I = σ (wnE + wn−1En−1)n 2 n
Now the slot may be described as is shown in the ladder network of Figure 8. The incremental reactance of one slice is:
2 Xn = ωµ0Δx
(wn + wn−1)
and the resistance of a slice is: 1 2
Rn = σΔx wn + wn−1
L[n] L[n] L[n−1] L[n−1]
2 2 2 2
R[n] R[n−1]
Figure 8: Slot Impedance Ladder Network
The procedure is to start at the bottom of the slot, corresponding to the right-hand end of the ladder (the inductance at the bottom of the slot is infinite so the first slice has only the resistance), and building toward the top of the slot.
4.9 Multiple Cages
In some larger induction motors the rotor cage is built in such a way as to separate the functions of ’starting’ and ’running’. The purpose of a “deep” slot is to improve starting performance of a motor. When the rotor is stationary, the frequency seen by rotor conductors is relatively high, and current crowding due to the skin effect makes rotor resistance appear to be high. As the rotor accelerates the frequency seen from the rotor drops, lessening the skin effect and making more use of the rotor conductor. This, then, gives the machine higher starting torque (requiring high resistance) without compromising running efficiency.
24

This effect can be carried even further by making use of multiple cages, such as is shown in Figure 9. Here there are two conductors in a fairly complex slot. Estimating the impedance of this slot is done in stages to build up an equivalent circuit.
hs
ws
h2
h1
w2
hd wd
w1
Figure 9: Double Slot
Assume for the purposes of this derivation that each section of the multiple cage is small enough that currents can be considered to be uniform in each conductor. Then the bottom section may be represented as a resistance in series with an inductance:
1 Ra =
σw1h1
µ0 h1La =
3 w1
The narrow slot section with no conductor between the top and bottom conductors will contribute an inductive impedance:
hsLs = µ0
ws
The top conductor will have a resistance:
1 Rb =
σw2h2
Now, in the equivalent circuit, current flowing in the lower conductor will produce a magnetic field across this section, yielding a series inductance of
h2Lb = µ0
w2
By analogy with the bottom conductor, current in the top conductor flows through only one third of the inductance of the top section, leading to the equivalent circuit of Figure 10, once the inductance of the slot depression is added on:
hdLt = µ0
wd
Now, this rotor bar circuit fits right into the framework of the induction motor equivalent circuit, shown for the double cage case in Figure 11, with
12lN2k2
R2a = S S RaNR
25

Lt 1 3 Lb
2 3 Lb Ls La
∩∩∩∩ ∩∩∩∩ ∩∩∩∩ ∩∩∩∩ ∩∩∩∩ < < <
> > Rb
< < <
> > Ra
Figure 10: Equivalent Circuit: Double Bar
12lN 2k2
R2b = S S RbNR
12lN 2k2 2 X2a = ω S S ( Lb + Ls + La)
NR 3
12lN 2k2 1 X2a = ω S S (Lt + Lb)
NR 3
Ia Ra X1 X2b I2 X2a ∧ ∧ ∧ ∨ ∨
∩∩∩∩ ∩∩∩∩ ∩∩∩∩ < <
Xm <> R2b > R2a< > s > s< <⊃⊃
⊃⊃
Figure 11: Equivalent Circuit: Double Cage Rotor
4.10 Rotor End Ring Effects
It is necessary to correct for “end ring” resistance in the rotor. To do this, we note that the magnitude of surface current density in the rotor is related to the magnitude of individual bar current by:
2πR Iz = Kz (115)
NR
Current in the end ring is: R
IR = Kz (116) p
Then it is straightforward to calculate the ratio between power dissipated in the end rings to power dissipated in the conductor bars themselves, considering the ratio of current densities and volumes. Assuming that the bars and end rings have the same radial extent, the ratio of current densities is:
JR NR wr = (117)
Jz 2πp lr
26

(
where wr is the average width of a conductor bar and lr is the axial end ring length. Now, the ratio of losses (and hence the ratio of resistances) is found by multiplying the square
of current density ratio by the ratio of volumes. This is approximately:
2πR lr NRRwrRend =
( NR wr
)2
2 = (118) 2πp lr NRl wr πllrp2Rslot
4.11 Windage
Bearing friction, windage loss and fan input power are often regarded as elements of a “black art”. We approach them with some level of trepidation, for motor manufacturers seem to take a highly empirical view of these elements. What follows is an attempt to build reasonable but simple models for two effects: loss in the air gap due to windage and input power to the fan for cooling. Some caution is required here, for these elements of calculation have not been properly tested, although they seem to give reasonable numbers
The first element is gap windage loss. This is produced by shearing of the air in the relative rotation gap. It is likely to be a signifigant element only in machines with very narrow air gaps or very high surface speeds. But these include, of course, the high performance machines with which we are most interested. We approach this with a simple “couette flow” model. Air-gap shear loss is approximately:
Pw = 2πR4Ω3lρaf (119)
where ρa is the density of the air-gap medium (possibly air) and f is the friction factor, estimated by:
.0076 f =
R (120)
1
4 n
and the Reynold’s Number Rn is ΩRg
Rn = (121) νair
and νair is the kinematic viscosity of the air-gap medium. The second element is fan input power. We base an estimate of this on two hypotheses. The
first of these is that the mass flow of air circulated by the fan can be calculated by the loss in the motor and an average temperature rise in the cooling air. The second hypothesis is the the pressure rise of the fan is established by the centrifugal pressure rise associated with the surface speed at the outside of the rotor. Taking these one at a time: If there is to be a temperature rise ΔT in the cooling air, then the mass flow volume is:
Pdm =
CpΔT
and then volume flow is just m
v = ρair
Pressure rise is estimated by centrifugal force:
ω )2
ΔP = ρair rfan p
27

( (
( ( ( )
then power is given by: = ΔP vPfan
For reference, the properties of air are:
Density 1.18 kg/m2ρair Kinematic Viscosity νair 1.56 × 10−5 m2/sec Heat Capacity Cp 1005.7 J/kg
4.12 Magnetic Circuit Loss and Excitation
There will be some loss in the stator magnetic circuit due to eddy current and hysteresis effects in the core iron. In addition, particularly if the rotor and stator teeth are saturated there will be MMF expended to push flux through those regions. These effects are very difficult to estimate from first principles, so we resort to a simple model.
Assume that the loss in saturated steel follows a law such as:
ωe )ǫf B
)ǫb
Pd = PB (122) ωB BB
This is not too bad an estimate for the behavior of core iron. Typically, ǫf is a bit less than two (between about 1.3 and 1.6) and ǫb is a bit more than two (between about 2.1 and 2.4). Of course this model is good only for a fairly restricted range of flux density. Base dissipation is usually expressed in “watts per kilogram”, so we first compute flux density and then mass of the two principal components of the stator iron, the teeth and the back iron.
In a similar way we can model the exciting volt-amperes consumed by core iron by something like:
B )ǫv1 B
)ǫv2 ω Qc = V a1 + V a2 (123)
BB BB ωB
This, too, is a form that appears to be valid for some steels. Quite obviously it may be necessary to develop different forms of curve ’fits’ for different materials.
Flux density (RMS) in the air-gap is:
pVaBr = (124)
2RlNak1ωs
Then flux density in the stator teeth is:
wt + w1Bt = Br (125)
wt
where wt is tooth width and w1 is slot top width. Flux in the back-iron of the core is
R Bc = Br (126)
pdc
where dc is the radial depth of the core.
28

( )
( )
( )
( )
5
One way of handling this loss is to assume that the core handles flux corresponding to terminal voltage, add up the losses and then compute an equivalent resistance and reactance:
3 Va|2
rc = |Pcore
3 Va|2
xc = |Qcore
then put this equivalent resistance in parallel with the air-gap reactance element in the equivalent circuit.
Solid Iron Rotor Bodies
Solid steel rotor electric machines (SSRM) can be made to operate with very high surface speeds and are thus suitable for use in high RPM situations. They resemble, in form and function, hysteresis machines. However, asynchronous operation will produce higher power output because it takes advantage of higher flux density. We consider here the interactions to be expected from solid iron rotor bodies. The equivalent circuits can be placed in parallel (harmonic-by-harmonic) with the equivalent circuits for the squirrel cage, if there is also a cage in the machine.
To estimate the rotor parameters R2s and X2s, we assume that important field quantities in the machine are sinusoidally distributed in time and space, so that radial flux density is:
Br = Re B ej(ωt−pφ) (127) r
and, similarly, axially directed rotor surface current is:
Kz = Re K ej(ωt−pφ) (128) z
Now, since by Faraday’s law: ∂B
= (129) ∇× E −∂t
we have, in this machine geometry: 1 ∂ ∂Br
Ez = (130) R ∂φ
−∂t
The transformation between rotor and stator coordinates is:
′ φ = φ − ωmt (131)
where ωm is rotor speed. Then: pωm = ω − ωr = ω(1 − s) (132)
and Now, axial electric field is, in the frame of the rotor, just:
Ez = Re E ej(ωt−pφ) (133) z
′
= Re E ej(ωrt−pφ ) (134) z
29

√
and ωrR
E = B (135) z r p
Of course electric field in the rotor frame is related to rotor surface current by:
E = Z K (136) z s z
Now these quantities can be related to the stator by noting that air-gap voltage is related to radial flux density by:
pB = V (137) r 2lNak1Rω ag
The stator-equivalent rotor current is:
π R I2 = K (138)
3 Nakaz
Then we can find stator referred, rotor equivalent impedance to be:
Z2 = V ag
=3 4 l
N2k2 ω Ez (139) I2 2 π R a a ωr Kz
Now, if rotor surface impedance can be expressed as:
Z = Rs + jωrLs (140) s
then R2
Z2 = + jX2 (141) s
where
3 4 l R2 = Na
2k2 1Rs (142)
2 π R 3 4 l
X2 = Na 2k2
1Xs (143) 2 π R
Now, to find the rotor surface impedance, we make use of a nonlinear eddy-current model proposed by Agarwal. First we define an equivalent penetration depth (similar to a skin depth):
2Hmδ = (144)
ωrσB0
where σ is rotor surface material volume conductivity, B0, ”saturation flux density” is taken to be 75 % of actual saturation flux density and
3 NakaHm = Kz =
π R |I2| (145) | |
Then rotor surface resistivity and surface reactance are:
16 1 Rs = (146)
3π σδ Xs = .5Rs (147)
30

Note that the rotor elements X2 and R2 depend on rotor current I2, so the problem is nonlinear. We find, however, that a simple iterative solution can be used. First we make a guess for R2 and find currents. Then we use those currents to calculate R2 and solve again for current. This procedure is repeated until convergence, and the problem seems to converge within just a few steps.
Aside from the necessity to iterate to find rotor elements, standard network techniques can be used to find currents, power input to the motor and power output from the motor, torque, etc.
5.1 Solution
Not all of the equivalent circuit elements are known as we start the solution. To start, we assume a value for R2, possibly some fraction of Xm, but the value chosen doesn not seem to matter much. The rotor reactance X2 is just a fraction of R2. Then, we proceed to compute an “air-gap” impedance, just the impedance looking into the parallel combination of magnetizing and rotor branches:
R2Zg = jXm (jX2 + ) (148) ||
s
(Note that, for a generator, slip s is negative). A total impedance is then
Zt = jX1 + R1 + Zg (149)
and terminal current is
It = Vt
Zt (150)
Rotor current is just:
I2 = It jXm
jX2 + R2
s
(151)
Now it is necessary to iteratively correct rotor impedance. This is done by estimating flux density at the surface of the rotor using (145), then getting a rotor surface impedance using (146) and using that and (143 to estimate a new value for R2. Then we start again with (148). The process “drops through” this point when the new and old estimates for R2 agree to some criterion.
5.2 Harmonic Losses in Solid Steel
If the rotor of the machine is constructed of solid steel, there will be eddy currents induced on the rotor surface by the higher-order space harmonics of stator current. These will produce magnetic fields and losses. This calculation assumes the rotor surface is linear and smooth and can be characterized by a conductivity and relative permeability. In this discussion we include two space harmonics (positive and negative going). In practice it may be necessary to carry four (or even more) harmonics, including both ‘belt’ and ‘zigzag’ order harmonics.
Terminal current produces magnetic field in the air-gap for each of the space harmonic orders, and each of these magnetic fields induces rotor currents of the same harmonic order.
The “magnetizing” reactances for the two harmonic orders, really the two components of the zigzag leakage, are:
k2
Xzp = Xm N2
p
k2 (152) p 1
31

√
k2
Xzn = Xm N 2
n
k2 (153) n 1
where Np and Nn are the positive and negative going harmonic orders: For ‘belt’ harmonics these orders are 7 and 5. For ‘zigzag’ they are:
Ns + pNp = (154)
p
Ns − pNn = (155)
p
Now, there will be a current on the surface of the rotor at each harmonic order, and following 65, the equivalent rotor element current is:
π R I2p = K (156)
3 Nakpp
π R I2n = K (157)
3 Naknn
These currents flow in response to the magnetic field in the air-gap which in turn produces an axial electric field. Viewed from the rotor this electric field is:
E = spωRB (158) p p
E = snωRBn (159) n
where the slip for each of the harmonic orders is:
sp = 1 −Np(1 − s) (160)
sn = 1 + Np(1 − s) (161)
and then the surface currents that flow in the surface of the rotor are:
EK =
p (162) p Zsp
EK = n (163) n Zsn
where Zsp and Zsn are the surface impedances at positive and negative harmonic slip frequencies, respectively. Assuming a linear surface, these are, approximately:
1 + jZs = (164)
σδ
where σ is material restivity and the skin depth is
2 δ = (165)
ωsµσ
32

and ωs is the frequency of the given harmonic from the rotor surface. We can postulate that the appropriate value of µ to use is the same as that estimated in the nonlinear calculation of the space fundamental, but this requires empirical confirmation.
The voltage induced in the stator by each of these space harmonic magnetic fluxes is:
2NakplRω Vp =
NppBp (166)
2NaknlRω Vn = Bn (167)
Nnp
Then the equivalent circuit impedance of the rotor is just:
Vp 3 4 N 2k2l Zsp Z2p = =
a p(168)
Ip 2 π NpR sp
Vn 3 4 N 2k2 l Zsn Z2n = = a n (169)
In 2 π NnR sn
The equivalent rotor circuit elements are now:
3 4 Na 2k2l 1
R2p = p
(170) 2 π NpR σδp
3 4 N 2k2 l 1 R2n = a n (171)
2 π NnR σδn
1 X2p =
2 R2p (172)
1 X2n = R2n (173)
2
5.3 Stray Losses
So far in this document, we have outlined the major elements of torque production and consequently of machine performance. We have also discussed, in some cases, briefly, the major sources of loss in induction machines. Using what has been outlined in this document will give a reasonable impression of how an induction machine works. We have also discussed some of the stray load
losses: those which can be (relatively) easily accounted for in an equivalent circuit description of the machine. But there are other losses which will occur and which are harder to estimate. We do not claim to do a particularly accurate job of estimating these losses, and fortunately they do not normally turn out to be very large. To be accounted for here are:
1. No-load losses in rotor teeth because of stator slot opening modulation of fundamental flux density,
2. Load losses in the rotor teeth because of stator zigzag mmf, and
3. No-load losses in the solid rotor body (if it exists) due to stator slot opening modulation of fundamental flux density.
33

√
Note that these losses have a somewhat different character from the other miscellaneous losses we compute. They show up as drag on the rotor, so we subtract their power from the mechanical output of the machine. The first and third of these are, of course, very closely related so we take them first.
The stator slot openings ‘modulate’ the space fundamental magnetic flux density. We may estimate a slot opening angle (relative to the slot pitch):
2πwdNs wdNsθD = =
2πr r
Then the amplitude of the magnetic field disturbance is:
2 θDBH = Br1 sin
π 2
In fact, this flux disturbance is really in the form of two traveling waves, one going forward and one backward with respect to the stator at a velocity of ω/Ns. Since operating slip is relatively small, the two variations will have just about the same frequency as viewed from the rotor, so it seems reasonable to lump them together. The frequency is:
NsωH = ω
p
Now, for laminated rotors this magnetic field modulation will affect the tips of rotor teeth. We assume (perhaps arbitrarily) that the loss due to this magnetic field modulation can be estimated from ordinary steel data (as we estimated core loss above) and that only the rotor teeth, not any of the rotor body, are affected. The method to be used is straightforward and follows almost exactly what was done for core loss, with modification only of the frequency and field amplitude.
For solid steel rotors the story is only a little different. The magnetic field will produce an axial electric field:
ω Ez = R BH
p
and that, in turn, will drive a surface current
EK = z
z Zs
Now, what is important is the magnitude of the surface current, and since Zs| = √
1 + .52Rs ≈|1.118Rs, we can simply use rotor resistance. The nonlinear surface penetration depth is:
2B0δ =
ωHσ Kz| |
A brief iterative substitution, re-calculating δ and then K quickly yields consistent values for δz||and Rs. Then the full-voltage dissipation is:
zPrs = 2πRl |K |2
σδ
and an equivalent resistance is: 3 Va|2
Rrs = |Prs
34

Finally, the zigzag order current harmonics in the stator will produce magnetic fields in the air gap which will drive magnetic losses in the teeth of the rotor. Note that this is a bit different from the modulation of the space fundamental produced by the stator slot openings (although the harmonic order will be the same, the spatial orientation will be different and will vary with load current). The magnetic flux in the air-gap is most easily related to the equivalent circuit voltage on the nth harmonic:
npvnBn =
2lRNaknω
This magnetic field variation will be substantial only for the zigzag order harmonics: the belt harmonics will be essentially shorted out by the rotor cage and those losses calculated within the equivalent circuit. The frequency seen by the rotor is that of the space harmonics, already calculated, and the loss can be estimated in the same way as core loss, although as we have pointed out it appears as a ‘drag’ on the rotor.
6 Induction Motor Speed Control
6.1 Introduction
The inherent attributes of induction machines make them very attractive for drive applications. They are rugged, economical to build and have no sliding contacts to wear. The difficulty with using induction machines in servomechanisms and variable speed drives is that they are “hard to control”, since their torque-speed relationship is complex and nonlinear. With, however, modern power electronics to serve as frequency changers and digital electronics to do the required arithmetic, induction machines are seeing increasing use in drive applications.
In this chapter we develop models for control of induction motors. The derivation is quite brief for it relies on what we have already done for synchronous machines. In this chapter, however, we will stay in “ordinary” variables, skipping the per-unit normalization.
6.2 Volts/Hz Control
Remembering that induction machines generally tend to operate at relatively low per unit slip, we might conclude that one way of building an adjustable speed drive would be to supply an induction motor with adjustable stator frequency. And this is, indeed, possible. One thing to remember is that flux is inversely proportional to frequency, so that to maintain constant flux one must make stator voltage proportional to frequency (hence the name “constant volts/Hz”). However, voltage supplies are always limited, so that at some frequency it is necessary to switch to constant voltage control. The analogy to DC machines is fairly direct here: below some “base” speed, the machine is controlled in constant flux (“volts/Hz”) mode, while above the base speed, flux is inversely proportional to speed. It is easy to see that the maximum torque is then inversely to the square of flux, or therefore to the square of frequency.
To get a first-order picture of how an induction machine works at adjustable speed, start with the simplified equivalent network that describes the machine, as shown in Figure 12
Earlier in this chapter, it was shown that torque can be calculated by finding the power dissipated in the virtual resistance R2/s and dividing by electrical speed. For a three phase machine, and assuming we are dealing with RMS magnitudes:
35

Ia Ra X1 X2 I2 ∧ ∧ ∧ ∨ ∨
∩∩∩∩ ∩∩∩∩
⊃⊃⊃⊃Xm
< < <
> >
R2
s
Figure 12: Equivalent Circuit
p 2 R2Te = 3
ω |I2|
s
where ω is the electrical frequency and p is the number of pole pairs. It is straightforward to find I2 using network techniques. As an example, Figure 13 shows a series of torque/speed curves for an induction machine operated with a wide range of input frequencies, both below and above its “base” frequency. The parameters of this machine are:
Number of Phases 3 Number of Pole Pairs 3 RMS Terminal Voltage (line-line) 230 Frequency (Hz) 60 Stator Resistance R1 .06 Ω Rotor Resistance R2 .055 Ω Stator Leakage X1 .34 Ω Rotor Leakage X2 .33 Ω Magnetizing Reactance Xm 10.6 Ω
Strategy for operating the machine is to make terminal voltage magnitude proportional to frequency for input frequencies less than the “Base Frequency”, in this case 60 Hz, and to hold voltage constant for frequencies above the “Base Frequency”.
For high frequencies the torque production falls fairly rapidly with frequency (as it turns out, it is roughly proportional to the inverse of the square of frequency). It also falls with very low frequency because of the effects of terminal resistance. We will look at this next.
6.3 Idealized Model: No Stator Resistance
Ignore, for the moment, R1. An equivalent circuit is shown in Figure 14. It is fairly easy to show that, from the rotor, the combination of source, armature leakage and magnetizing branch can be replaced by its equivalent circuit, as shown in in Figure 15.
In the circuit of Figure 15, the parameters are:
′ Xm
V = V Xm + X1
′ X = Xm||X1
36

Induction Motor Torque
0
50
100
150
200
250
N−
m
0 50 100 150 200 250 Speed, RPM
Figure 13: Induction Machine Torque-Speed Curves
Ia X1 X2 I2
∩∩∩∩∩∩∩∩ <+
V Xm <> R2
− > s<⊃⊃⊃⊃
Figure 14: Idealized Circuit: Ignore Armature Resistance
If the machine is operated at variable frequency ω, but the reactance is established at frequency ωB, current is:
′ V I =
′ ωj(X1 + X2)ωB + R2
s
and then torque is
2 R2 3p |V ′ |2 R2
Te = 3 I2 = s ′
| | s ω (X1 + X2)2 + (R
s 2 )2
Now, if we note that what counts is the absolute slip of the rotor, we might define a slip with respect to base frequency:
ωr ωr ωB ωB s =
ω = ωB ω
= sB ω
37

′
Ia X1 X2 I2
∩∩∩∩ ∩∩∩∩ <+
V ′ > R2<
− > s<
Figure 15: Idealized Equivalent
Then, if we assume that voltage is applied proportional to frequency:
ω′ ′ V = V0 ωB
and with a little manipulation, we get:
′ 2 R23p V0 | sBTe = |
′ωB (X1 + X2)2 + (R2 )2 sB
This would imply that torque is, if voltage is proportional to frequency, meaning constant applied flux, dependent only on absolute slip. The torque-speed curve is a constant, dependent only on the difference between synchronous and actual rotor speed.
This is fine, but eventually, the notion of “volts per Hz” runs out because at some number of Hz, there are no more volts to be had. This is generally taken to be the “base” speed for the drive. Above that speed, voltage is held constant, and torque is given by:
|V ′ 2 R2
Te =3p |
sB
′ωB (X1 + X2)2 + (R2 )2 sB
The peak of this torque has a square-inverse dependence on frequency, as can be seen from Figure 16.
6.4 Peak Torque Capability
Assuming we have a smart controller, we are interested in the actual capability of the machine. At some voltage and frequency, torque is given by:
2 R2 3 p
Te = 3 I2 = ωω
|V ′ 2 Rs 2
′ ′| |
s ((X1 + X2)( ωB ))
|2 + (R1 + R2 )2
s
Now, we are interested in finding the peak value of that, which is given by the value of R2s which maximizes power transfer to the virtual resistance. This is given by the matching condition:
R2 √
ω′2 ′ = R1 + ((X1 + X2)( ))2
s ωB
38

√
√
Induction Motor Torque
0 500 1000 1500 2000 0
50
100
150
200
250
N−
m
Speed, RPM
Figure 16: Idealized Torque-Speed Curves: Zero Stator Resistance
Then maximum (breakdown) torque is given by:
3 Vpω
ωωB
′
′ 2 ′2 ′ ))2R + ((X1 + X2)( | | 1 Tmax =
ωω
ωωB B
This is plotted in Figure 17. Just as a check, this was calculated assuming R1 = 0, and the results are plotted in figure 18. This plot shows, as one would expect, a constant torque limit region to zero speed.
6.5 Field Oriented Control
One of the more useful impacts of modern power electronics and control technology has enabled us to turn induction machines into high performance servomotors. In this note we will develop a picture of how this is done. Quite obviously there are many details which we will not touch here. The objective is to emulate the performance of a DC machine, in which (as you will recall), torque is a simple function of applied current. For a machine with one field winding, this is simply:
T = GIf Ia
This makes control of such a machine quite easy, for once the desired torque is known it is easy to translate that torque command into a current and the motor does the rest.
Of course DC (commutator) machines are, at least in large sizes, expensive, not particularly efficient, have relatively high maintenance requirements because of the sliding brush/commutator interface, provide environmental problems because of sparking and carbon dust and are environmentally sensitive. The induction motor is simpler and more rugged. Until fairly recently the induction motor has not been widely used in servo applications because it was thought to be ”hard to control”. As we will show, it does take a little effort and even some computation to do the controls right, but this is becoming increasingly affordable.
39
′2′ ′ ))2 + (R ))2)2((X1 + X2)( R + ((X1 + X2)( 1 + 1

[ ] [ ] [ ]
[ ] [ ] [ ]
Breakdown Torque 300
250
200
150
100
New
ton−
Met
ers
50
0 0 20 40 60 80 100 120
Drive Frequency, Hz
Figure 17: Torque-Capability Curve For An Induction Motor
6.6 Elementary Model:
We return to the elementary model of the induction motor. In ordinary variables, referred to the stator, the machine is described by flux-current relationships (in the d-q reference frame):
λdS LS M idS = λdR M LR idR
λqS = LS M iqS
λqR M LR iqR
Note the machine is symmetric (there is no saliency), and since we are referred to the stator, the stator and rotor self-inductances include leakage terms:
LS = M + LSℓ
LR = M + LRℓ
The voltage equations are:
dλdS vdS = − ωλqS + rSidS
dt dλqS
vqS = + ωλdS + rSiqS dt dλdR
0 = − ωsλqR + rRidR dt dλqR
0 = + ωsλdR + rRiqR dt
40

( )
Breakdown Torque 300
250
200
150New
ton−
Met
ers
100
50 0 20 40 60 80 100 120
Drive Frequency, Hz
Figure 18: Idealized Torque Capability Curve: Zero Stator Resistance
Note that both rotor and stator have “speed” voltage terms since they are both rotating with respect to the rotating coordinate system. The speed of the rotating coordinate system is w with respect to the stator. With respect to the rotor that speed is , where wm is the rotor mechanical speed. Note that this analysis does not require that the reference frame coordinate system speed w be constant.
Torque is given by:3
T e = p (λdSiqS − λqSidS)2
6.7 Simulation Model
As a first step in developing a simulation model, see that the inversion of the flux-current relationship is (we use the d- axis since the q- axis is identical):
LR M idS =
LSLR −M 2 λdS −
LSLR −M 2 λdR
M LSidR =
LSLR −M 2 λdS −
LSLR −M 2 λdR
Now, if we make the following definitions (the motivation for this should by now be obvious):
Xd = ω0LS
Xkd = ω0LR
Xad = ω0M
M 2 ′ Xd = ω0 LS −
LR
41

the currents become:
ω0 Xad ω0idS = λdS − λdR ′ ′ Xd Xkd Xd
Xad ω0 Xd ω0idR = λdR ′ ′ Xkd Xd
λdS −Xd Xkd
The q- axis is the same. Torque may be, with these calculations for current, written as:
3 3 ω0Xad Te = p (λdSiqS − λqSidS) = p (λdSλqR − λqSλdR)
′ 2−
2 XkdXd
Note that the usual problems with ordinary variables hold here: the foregoing expression was written assuming the variables are expressed as peak quantities. If RMS is used we must replace 3/2 by 3!
With these, the simulation model is quite straightforward. The state equations are:
dλdS = VdS + ωλqS −RSidS
dt dλqS
= VqS − ωλdS −RSiqS dt
dλdR = ωsλqR −RRidR
dt dλqR
= −ωsλdR −RSiqR dt dΩm 1
= (Te + Tm)dt J
where the rotor frequency (slip frequency) is:
ωs = ω − pΩm
For simple simulations and constant excitaion frequency, the choice of coordinate systems is arbitrary, so we can choose something convenient. For example, we might choose to fix the coordinate system to a synchronously rotating frame, so that stator frequency ω = ω0. In this case, we could pick the stator voltage to lie on one axis or another. A common choice is Vd = 0 and Vq = V .
6.8 Control Model
If we are going to turn the machine into a servomotor, we will want to be a bit more sophisticated about our coordinate system. In general, the principle of field-oriented control is much like emulating the function of a DC (commutator) machine. We figure out where the flux is, then inject current to interact most directly with the flux.
As a first step, note that because the two stator flux linkages are the sum of air-gap and leakage flux,
λdS = λagd + LSℓidS
λqS = λagq + LSℓiqS
42

( )
This means that we can re-write torque as:
3 T e = p (λagdiqS − λagqidS)
2
Next, note that the rotor flux is, similarly, related to air-gap flux:
λagd = λdR − LRℓidR
λagq = λqR − LRℓiqR
Torque now becomes:
3 3 T e = p (λdRiqS − λqRidS) − pLRℓ (idRiqS − iqRidS)
2 2
Now, since the rotor currents could be written as:
idR = λdR
LR − M LR
idS
iqR = λqR
LR − M LR
iqS
That second term can be written as:
1 idRiqS − iqRidS = (λdRiqS − λqRidS)
LR
So that torque is now:
3 LRℓ 3 M T e = p 1 − (λdRiqS − λqRidS) = p (λdRiqS − λqRidS)
2 LR 2 LR
6.9 Field-Oriented Strategy:
What is done in field-oriented control is to establish a rotor flux in a known position (usually this position is the d- axis of the transformation) and then put a current on the orthogonal axis (where it will be most effective in producing torque). That is, we will attempt to set
λdR = Λ0
λqR = 0
Then torque is produced by applying quadrature-axis current:
3 M T e = p Λ0iqS
2 LR
The process is almost that simple. There are a few details involved in figuring out where the quadrature axis is and how hard to drive the direct axis (magnetizing) current.
43

∫
Now, suppose we can succeed in putting flux on the right axis, so that λqR = 0, then the two rotor voltage equations are:
dλdR 0 = − ωsλqR + rRIdR
dt dλqR
0 = + ωsλdR + rRIqR dt
Now, since the rotor currents are:
λdR M idR =
LR −LR
idS
λqR M iqR =
LR −LR
iqS
The voltage expressions become, accounting for the fact that there is no rotor quadrature axis flux:
0 = dλdR
dt + rR
( λdR
LR − M LR
idS
)
M 0 = ωsλdR − rR
LR iqS
Noting that the rotor time constant is
LRTR =
rR
we find:
dλdR TR + λdR = M idS
dt M iqS
ωs = TR λdR
The first of these two expressions describes the behavior of the direct-axis flux: as one would think, it has a simple first-order relationship with direct-axis stator current. The second expression, which describes slip as a function of quadrature axis current and direct axis flux, actually describes how fast to turn the rotating coordinate system to hold flux on the direct axis.
Now, a real machine application involves phase currents ia, ib and ic, and these must be derived from the model currents idS and iqs. This is done with, of course, a mathematical operation which uses a transformation angle θ. And that angle is derived from the rotor mechanical speed and computed slip:
θ = (pωm + ωs) dt
A generally good strategy to make this sort of system work is to measure the three phase currents and derive the direct- and quadrature-axis currents from them. A good estimate of direct-axis flux is made by running direct-axis flux through a first-order filter. The tricky operation involves dividing quadrature axis current by direct axis flux to get slip, but this is now easily done numerically (as
44

θ
Motor Load
ic
ib
ia
Amp
o
o
o
T-1
T
iq *
id *
ic *
ib *
ia *
M
STa1 +
M
TR
N÷÷D
N
D
Σ
ω m
ω S
∫θ
λ dR
Figure 19: Field Oriented Controller
are the trigonometric operations required for the rotating coordinate system transformation). An elmentary block diagram of a (possbly) plausible scheme for this is shown in Figure 19.
In this picture we start with commanded values of direct- and quadrature- axis currents, corresponding to flux and torque, respectively. These are translated by a rotating coordinate transformation into commanded phase currents. That transformation (simply the inverse Park’s transform) uses the angle q derived as part of the scheme. In some (cheap) implementations of this scheme the commanded currents are used rather than the measured currents to establish the flux and slip.
∗We have shown the commanded currents ia, etc. as inputs to an “Amplifier”. This might be implemented as a PWM current-source, for example, and a tight loop here results in a rather high performance servo system.
References
[1] P.L. Alger, “Induction Machines”, Gordon and Breach, 1969
[2] A.E. Fitzgerals, C. Kingsley Jr., S.D. Umans, ”Electric Machinery”, Sixth Edition, McGraw Hill, 2003
45

[3] D. Fink, H. W. Beaty, ”Standard Handbook for Electrical Engineers, Thirteenth Edition,McGraw-Hill, 1993
46

r1 x1 ∧ ∧ ∧ ∩∩∩∩∨ ∨
jx2s jx2c ⊃⊃⊃⊃
⊃⊃⊃⊃
⊃⊃⊃⊃
< < <
> >
< < <
> >
< < <
> > ⊃⊃
⊃⊃jxag rc xc
r2s r2c
s s
jx2s5 jx2c5 ⊃⊃⊃⊃
⊃⊃⊃⊃
jxa5 ⊃⊃⊃⊃
< < <
> >
< < <
> >
r2s5 r2c5
s5 s5
jx2s7 jx2c7 ⊃⊃⊃⊃
⊃⊃⊃⊃
jxa7 ⊃⊃⊃⊃
< < <
> >
< < <
> >
r2s7 r2c7
s7 s7
jx2sm jx2cm ⊃⊃⊃⊃
⊃⊃⊃⊃
jxam ⊃⊃⊃⊃
< < <
> >
< < <
> >
r2sm r2cm
smsm
jx2sp jx2cp ⊃⊃⊃⊃
⊃⊃⊃⊃
jxap ⊃⊃⊃⊃
< < <
> >
< < <
> >
r2sp r2cp
sp sp
Figure 20: Extended Equivalent Circuit
47

[ ] [ ] [ ]
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
6.685 Electric Machinery
Class Notes 9: Synchronous Machine Simulation Models September 5, 2005 c2005 James L. Kirtley Jr.
1 Introduction
In this document we develop models useful for calculating the dynamic behavior of synchronous machines. We start with a commonly accepted picture of the synchronous machine, assuming that the rotor can be fairly represented by three equivalent windings: one being the field and the other two, the d- and q- axis “damper” windings, representing the effects of rotor body, wedge chain, amortisseur and other current carrying paths.
While a synchronous machine is assumed here, the results are fairly directly applicable to induction machines. Also, extension to situations in which the rotor representation must have more than one extra equivalent winding per axis should be straightforward.
2 Phase Variable Model
To begin, assume that the synchronous machine can be properly represented by six equivalent windings. Four of these, the three armature phase windings and the field winding, really are windings. The other two, representing the effects of distributed currents on the rotor, are referred to as the “damper” windings. Fluxes are, in terms of currents:
L M Iph λph = ph
λR M T L IR (1)
R
where phase and rotor fluxes (and, similarly, currents) are:
λa
λph = λb (2) λc
λf
λR = λkd (3) λkq
There are three inductance sub- matrices. The first of these describes armature winding inductances:
La Lab Lac
L = Lab Lb Lbc (4)
ph Lac Lbc Lc
1

3
where, for a machine that may have some saliency:
La = La0 + L2 cos 2θ (5)
2π Lb = La0 + L2 cos 2(θ − ) (6)
3 2π
Lc = La0 + L2 cos 2(θ + ) (7) 3 π
Lab = Lab0 + L2 cos 2(θ − ) (8) 3
Lbc = Lab0 + L2 cos 2θ (9) π
Lac = Lab0 + L2 cos 2(θ + ) (10) 3
Note that, in this last set of expressions, we have assumed a particular form for the mutual inductances. This is seemingly restrictive, because it constrains the form of phase- to- phase mutual inductance variations with rotor position. The coefficient L2 is actually the same in all six of these last expressions. As it turns out, this assumption does not really restrict the accuracy of the model very much. We will have more to say about this a bit later.
The rotor inductances are relatively simply stated: Lf Lfkd 0
L = Lfkd Lkd 0
(11) R
0 0 Lkq
And the stator- to- rotor mutual inductances are: M cos θ Lakd cos θ −Lakq sin θ
M = M cos(θ − 2π
3 ) Lakd cos(θ − 2π 3 ) −Lakq sin(θ − 2π
3 ) (12)
M cos(θ + 2π 3 ) Lakd cos(θ + 2π
3 ) −Lakq sin(θ + 2π 3 )
Park’s Equations
The first step in the development of a suitable model is to transform the armature winding variables to a coordinate system in which the rotor is stationary. We identify equivalent armature windings in the direct and quadrature axes. The direct axis armature winding is the equivalent of one of the phase windings, but aligned directly with the field. The quadrature winding is situated so that its axis leads the field winding by 90 electrical degrees. The transformation used to map the armature currents, fluxes and so forth onto the direct and quadrature axes is the celebrated Park’s Transformation, named after Robert H. Park, an early investigator into transient behavior in synchronous machines. The mapping takes the form:
ud ua
uq = udq = Tuph = T
ub (13) u0 uc
Where the transformation and its inverse are:
cos θ cos(θ − 23 π ) cos(θ + 23
π )2 2π
T = − sin θ − sin(θ − 3 ) − sin(θ + 23
π ) (14)
3 1 1 1 2 2 2
2

[ ] [ ] [ ]
cos θ − sin θ 1
2π 2π
T −1 = cos(θ − 3 ) − sin(θ − 3 ) 1
(15) 2πcos(θ + 23
π ) − sin(θ + 3 ) 1
This transformation maps balanced sets of phase currents into constant currents in the d-q frame. That is, if rotor angle is θ = ωt + θ0, and phase currents are:
Ia = I cos ωt 2π
Ib = I cos(ωt − )3 2π
Ic = I cos(ωt + )3
Then the transformed set of currents is:
Id = I cos θ0
Iq = −I sin θ0
Now, we apply this transformation to (1) to express fluxes and currents in the armature in the d-q reference frame. To do this, extract the top line in (1):
λph = L ph Iph + MIR (16)
The transformed flux is obtained by premultiplying this whole expression by the transformation matrix. Phase current may be obtained from d-q current by multiplying by the inverse of the transformation matrix. Thus:
λdq = TL ph T −1Idq + TMIR (17)
The same process carried out for the lower line of (1) yields:
λR = MT T −1Idq + L R IR (18)
Thus the fully transformed version of (1) is:
L LCλdq = dq Idq (19) 3 LT L IRλR 2 C R
If the conditions of (5) through (10) are satisfied, the inductance submatrices of (19) wind up being of particularly simple form. (Please note that a substantial amount of algebra has been left out here!)
Ld 0 0
L = 0 Lq 0
(20) dq
0 0 L0
M Lakd 0
L = 0 0 Lakq (21)
C 0 0 0
3

Note that (19) through (21) express three separate sets of apparently independent flux/current relationships. These may be re-cast into the following form:
λd Ld Lakd M Id
λkd
=
3
2 Lakd Lkd Lfkd Ikd
(22)
λf 3 2 M Lfkd Lf If
[ ] [ ] [ ] λq
λkq =
Lq 3 2 Lakq
Lakq
Lkq
Iq Ikq
(23)
λ0 = L0I0 (24)
Where the component inductances are:
3 Ld = La0 − Lab0 + L2 (25)
2 3
Lq = La0 − Lab0 − L2 (26) 2
L0 = La0 + 2Lab0 (27)
Note that the apparently restrictive assumptions embedded in (5) through (10) have resulted in the very simple form of (21) through (24). In particular, we have three mutually independent sets of fluxes and currents. While we may be concerned about the restrictiveness of these expressions, note that the orthogonality between the d- and q- axes is not unreasonable. In fact, because these axes are orthogonal in space, it seems reasonable that they should not have mutual flux linkages. The principal consequence of these assumptions is the de-coupling of the zero-sequence component of flux from the d- and q- axis components. We are not in a position at this time to determine the reasonableness of this. However, it should be noted that departures from this form (that is, coupling between the “direct” and “zero” axes) must be through higher harmonic fields that will not couple well to the armature, so that any such coupling will be weak.
Next, armature voltage is, ignoring resistance, given by:
d d V ph =
dtλph = T −1λdq (28)
dt and that the transformed armature voltage must be:
V dq = TV ph
d = T (T −1λdq)dt
d d = λdq + (T T −1)λdq (29)
dt dt
A good deal of manupulation goes into reducing the second term of this, resulting in:
0 −dθ 0
dt d dθ
T T −1 = dt
0 0 (30) dt
0 0 0
4

4
5
This expresses the speed voltage that arises from a coordinate transformation. The two voltage/flux relationships that are affected are:
dλdVd = − ωλq (31)
dt dλq
Vq = + ωλd (32) dt
where we have used dθ
ω = (33) dt
Power and Torque
Instantaneous power is given by: P = VaIa + VbIb + VcIc (34)
Using the transformations given above, this can be shown to be:
3 3 P =
2 VdId +
2 VqIq + 3V0I0 (35)
which, in turn, is:
P = ω 3
2(λdIq − λqId) +
3
2( dλd
dt Id +
dλq
dt Iq) + 3
dλ0
dt I0 (36)
Then, noting that electrical speed ω and shaft speed Ω are related by ω = pΩ and that (36) describes electrical terminal power as the sum of shaft power and rate of change of stored energy, we may deduce that torque is given by:
3 T = p(λdIq − λqId) (37)
2
Per-Unit Normalization
The next thing for us to do is to investigate the way in which electric machine system are nor
malized, or put into what is called a per-unit system. The reason for this step is that, when the voltage, current, power and impedance are referred to normal operating parameters, the behavior characteristics of all types of machines become quite similar, giving us a better way of relating how a particular machine works to some reasonable standard. There are also numerical reasons for normalizing performance parameters to some standard.
The first step in normalization is to establish a set of base quantities. We will be normalizing voltage, current, flux, power, impedance and torque, so we will need base quantities for each of these. Note, however, that the base quantities are not independent. In fact, for the armature, we need only specify three quantities: voltage (VB), current (IB) and frequency (ω0). Note that we do not normalize time nor frequency. Having done this for the armature circuits, we can derive each of the other base quantities:
5

• Base Power 3
PB = VBIB2
• Base Impedance VB
ZB = IB
• Base Flux VB
λB = ω0
• Base Torque p
TB = PBω0
Note that, for our purposes, base voltage and current are expressed as peak quantities. Base voltage is taken on a phase basis (line to neutral for a “wye” connected machine), and base current is similarly taken on a phase basis, (line current for a “wye” connected machine).
Normalized, or per-unit quantities are derived by dividing the ordinary variable (with units) by the corresponding base. For example, per-unit flux is:
λ ω0λ ψ = = (38)
λB VB
In this derivation, per- unit quantities will usually be designated by lower case letters. Two notable exceptions are flux, where we use the letter ψ, and torque, where we will still use the upper case T and risk confusion.
Now, we note that there will be base quantities for voltage, current and frequency for each of the different coils represented in our model. While it is reasonable to expect that the frequency
base will be the same for all coils in a problem, the voltage and current bases may be different. We might write (22) as:
ω0IdB Ld
ω0IkB Lakd ω0If B M
id
Vdb Vdb Vdbψd
ω0IdB 3 ω0If B ψkd = 2 Lakd
ω0IkB Lkd Lfkd ikd (39) Vkb Vkb Vkdb
ψf ω0IdB 3 M ω0IkB ifLfkd ω0If B LfVf b 2 Vf b Vf b
where i = I/IB denotes per-unit, or normalized current. Note that (39) may be written in simple form:
ψd xd xakd xad id
ψkd =
xakd xkd xfkd ikd (40) ψf xad xfkd xf if
It is important to note that (40) assumes reciprocity in the normalized system. To wit, the following expressions are implied:
IdB xd = ω0 Ld (41)
VdB
6

[ ] [ ] [ ]
IkB xkd = ω0 Lkd (42)
VkB
IfB xf = ω0 Lf (43)
VfB
IkB xakd = ω0 Lakd
VdB
3 IdB = ω0 Lakd (44)
2 VkB
IfB xad = ω0 M
VdB
3 IdB = ω0 M (45)
2 VfB
IkB xfkd = ω0 Lfkd
Vfb
IfB = ω0 Lfkd (46)
Vkb
These in turn imply:
3 VdBIdB = VfBIfB (47)
2 3 VdBIdB = VkBIkB (48)
2 VfBIfB = VkBIkB (49)
These expressions imply the same power base on all of the windings of the machine. This is so because the armature base quantities Vdb and Idb are stated as peak values, while the rotor base quantities are stated as DC values. Thus power base for the three- phase armature is 3 times 2 the product of peak quantities, while the power base for the rotor is simply the product of those quantities.
The quadrature axis, which may have fewer equivalent elements than the direct axis and which may have different numerical values, still yields a similar structure. Without going through the details, we can see that the per-unit flux/current relationship for the q- axis is:
ψq = xq xakq iq (50)
ψkq xakq xkq ikq
The voltage equations, including speed voltage terms, (31) and (32), may be augmented to reflect armature resistance:
dλdVd = − ωλq + RaId (51)
dt dλq
Vq = ωλd + + RaIq (52) dt
The per-unit equivalents of these are:
1 dψd ω vd = − ψq + raid (53)
ω0 dt ω0
7

ω 1 dψqvq = ψd + + raiq (54)
ω0 ω0 dt
RaWhere the per-unit armature resistance is just ra = ZB
Note that none of the other circuits in this model have speed voltage terms, so their voltage expressions are exactly what we might expect:
vf = 1
ω0
dψf
dt + rf if (55)
vkd = 1
ω0
dψkd
dt + rkdikd (56)
vkq = 1
ω0
dψkq
dt + rkqikq (57)
v0 = 1
ω0
dψ0
dt + rai0 (58)
It should be noted that the damper winding circuits represent closed conducting paths on the rotor, so the two voltages vkd and vkq are always zero.
Per-unit torque is simply: Te = ψdiq − ψqid (59)
Often, we need to represent the dynamic behavior of the machine, including electromechanical dynamics involving rotor inertia. If we note J as the rotational inertia constant of the machine system, the rotor dynamics are described by the two ordinary differential equations:
1 dω J = T e + T m (60) p dt
dδ = ω − ω0 (61)
dt
where T e and T m represent electrical and mechanical torques in “ordinary” variables. The angle δ represents rotor phase angle with respect to some synchronous reference.
It is customary to define an “inertia constant” which is not dimensionless but which nevertheless fits into the per-unit system of analysis. This is:
Rotational kinetic energy at rated speed H ≡ (62)
Base Power
Or: ( )2
1 2 J ω
p 0
J ω0H = = (63)
PB 2pTB
Then the per-unit equivalent to (60) is:
2H dω = Te + Tm (64)
ω0 dt
where now we use Te and Tm to represent per-unit torques.
8

6
7
Equal Mutual’s Base
In normalizing the differential equations that make up our model, we have used a number of base quantities. For example, in deriving (40), the per-unit flux- current relationship for the direct axis, we used six base quantities: VB , IB, VfB , IfB , VkB and IkB. Imposing reciprocity on (40) results in two constraints on these six variables, expressed in (47) through (49). Presumably the two armature base quantities will be fixed by machine rating. That leaves two more “degrees of freedom” in selection of base quantities. Note that the selection of base quantities will affect the reactance matrix in (40).
While there are different schools of thought on just how to handle these degrees of freedom, a commonly used convention is to employ what is called the equal mutuals base system. The two degrees of freedom are used to set the field and damper base impedances so that all three mutual inductances of (40) are equal:
xakd = xfkd = xad (65)
The direct- axis flux- current relationship becomes:
ψd xd xad xad id
ψkd
=
xad xkd xad
ikd
(66)
ψf xad xad xf if
Equivalent Circuit
id if ra xal xfl rf ∧ ∧ ∧ ∩∩∩∩ ∩∩∩∩ ∧ ∧ ∧ ∨ ∨ ∨ ∨
+ +
(ω0vd + ωψq) ψd
⊃⊃⊃⊃
⊃⊃⊃⊃xkdl
+
vfxad
< >
< rkd - - > <
Figure 1: D- Axis Equivalent Circuit
The flux- current relationship of (66) is represented by the equivalent circuit of Figure 1, if the “leakage” inductances are defined to be:
xal = xd − xad (67)
xkdl = xkd − xad (68)
xfl = xf − xad (69)
9

Many of the interesting features of the electrical dynamics of the synchronous machine may be discerned from this circuit. While a complete explication of this thing is beyond the scope of this note, it is possible to make a few observations.
The apparent inductance measured from the terminals of this equivalent circuit (ignoring resistance ra) will, in the frequency domain, be of the form:
ψd(s) Pn(s) x(s) = = xd (70)
id(s) Pd(s)
Both the numerator and denominator polynomials in s will be second order. (You may convince yourself of this by writing an expression for terminal impedance). Since this is a “diffusion” type circuit, having only resistances and inductances, all poles and zeros must be on the negative real axis of the “s-plane”. The per-unit inductance is, then:
′ ′′ (1 + T s)(1 + T s)dx(s) = xdd′ ′′
(71) (1 + T s)(1 + T s)do do
′ ′′ The two time constants Td and Td are the reciprocals of the zeros of the impedance, which are the poles of the admittance. These are called the short circuit time constants.
′ ′′ The other two time constants Tdo and Tdo are the reciprocals of the poles of the impedance, and so are called the open circuit time constants.
We have cast this thing as if there are two sets of well- defined time constants. These are the ′ ′ ′′ ′′ transient time constants Td and Tdo, and the subtransient time constants T and Tdo . In many d
cases, these are indeed well separated, meaning that:
′ ′′ Td ≫ Td (72) ′ ′′ ≫ Tdo (73) Tdo
If this is true, then the reactance is described by the pole-zero diagram shown in Figure 2. Under this circumstance, the apparent terminal inductance has three distinct values, depending on frequency. These are the synchronous inductance, the transient inductance, and the subtransient
inductance, given by:
′
′ Tdxd = xd ′
(74) Tdo
′′
′′ ′ Tdxd = xd ′′ Tdo
′ ′′ Td Td= xd ′ ′′ (75)
T Tdo do
A Bode Plot of the terminal reactance is shown in Figure 3.If the time constants are spread widely apart, they are given, approximately, by:
′ xf
= (76) Tdo ω0rf
′′ xkdl + xfl||xad
= (77) Tdo ω0rkd
10

8
1 1 ′
Tdo ” do × T
× 1 1
′Td ” Td
Figure 2: Pole-Zero Diagram For Terminal Inductance
log |x(jω)|
1 1 1 1 log ω ′ ′T T Tdo ” Td ” do d
Figure 3: Frequency Response of Terminal Inductance
Finally, note that the three reactances are found simply from the model:
xd = xal + xad (78) ′ xd = xal + xad||xfl (79) ′′ xd = xal + xad||xfl||xkdl (80)
Statement of Simulation Model
Now we can write down the simulation model. Actually, we will derive more than one of these, since the machine can be driven by either voltages or currents. Further, the expressions for permanent magnet machines are a bit different. So the first model is one in which the terminals are all constrained by voltage.
The state variables are the two stator fluxes ψd, ψq, two “damper” fluxes ψkd, ψkq, field flux ψf , and rotor speed ω and torque angle δ. The most straightforward way of stating the model employs currents as auxiliary variables, and these are:
−1 id xd xad xad ψd
ikd =
xad xkd xad ψkd (81) if xad xad xf ψf
[ ] [ ]
−1 [ ] xq xaq ψq (82)
iq = ikq xaq xkq ψkq
11

Then the state equations are:
dψd
dt = ω0vd + ωψq − ω0raid (83)
dψq
dt = ω0vq − ωψd − ω0raiq (84)
dψkd
dt = −ω0rkdikd (85)
dψkq
dt = −ω0rkqikq (86)
dψf
dt = ω0vf − ω0rf if (87)
dω dt
= ω0
2H (Te + Tm) (88)
dδ dt
= ω − ω0 (89)
and, of course, Te = ψdiq − ψqid
8.1 Statement of Parameters:
′ ′′ ′ Note that often data for a machine may be given in terms of the reactances xd, xd, xd, T and do ′′ Tdo, rather than the elements of the equivalent circuit model. Note that there are four inductances
in the equivalent circuit so we have to assume one. There is no loss in generality in doing so. Usually one assumes a value for the stator leakage inductance, and if this is done the translation is straightforward:
xad = xd − xal ′ xad(xd − xal)
xfl = ′ xad − xd + xal
1 xkdl = 1 − 1 − 1
′′x −xal xad xf l d
xfl + xad rf =
′ω0Tdo
xkdl + xad||xfl rkd =
′′ ω0Tdo
8.2 Linearized Model
Often it becomes desirable to carry out a linearized analysis of machine operation to, for example, examine the damping of the swing mode at a particular operating point. What is done, then, is to assume a steady state operating point and examine the dynamics for deviations from that operating point that are “small”. The definition of “small” is really “small enough” that everything important appears in the first-order term of a Taylor series about the steady operating point.
Note that the expressions in the machine model are, for the most part, linear. There are, however, a few cases in which products of state variables cause us to do the expansion of the
12

Taylor series. Assuming a steady state operating point [ψd0 ψkd0 ψf0 ψq0 ψkq0 ω0 δ0], the first-order (small-signal) variations are described by the following set of equations. First, since the flux-current relationship is linear:
−1 id1 xd xad xad ψd1
ikd1 =
xad xkd xad ψkd1 (90) if1 xad xad xf ψf1
[ ] [ ]
−1 [ ] xq xaq ψq1 (91)
iq1 =ikq1 xaq xkq ψkq1
Terminal voltage will be, for operation against a voltage source:
Vd = V sin δ Vq = V cos δ
Then the differential equations governing the first-order variations are:
dψd1 = ω0V cos δ0δ1 + ω0ψq1 + ω1ψq0 − ω0raid1 (92)
dtdψq1
= −ω0V sin δ0δ1 − ω0ψd1 − ω1ψd0 − ω0raiq1 (93) dt
dψkd1= −ω0rkdikd1 (94)
dtdψkq1
= −ω0rkqikq1 (95) dtdψf1
= −ω0rf if1 (96) dt dω1 ω0
= (Te1 + Tm1) (97) dt 2H
dδ1= ω1 (98)
dt
Te = ψd0iq1 + ψd1iq0 − ψq0id1 − ψq1id0
8.3 Reduced Order Model for Electromechanical Transients
In many situations the two armature variables contribute little to the dynamic response of the machine. Typically the armature resistance is small enough that there is very little voltage drop across it and transients in the difference between armature flux and the flux that would exist in the “steady state” decay rapidly (or are not even excited). Further, the relatively short armature time constant makes for very short time steps. For this reason it is often convenient, particularly when studying the relatively slow electromechanical transients, to omit the first two differential equations and set:
ψd = vq = V cos δ (99)
ψq = −vd = −V sin δ (100)
The set of differential equations changes only a little when this approximation is made. Note, however, that it can be simulated with far fewer “cycles” if the armature time constant is short.
13

9 Current Driven Model: Connection to a System
The simulation expressions developed so far are useful in a variety of circumstances. They are, however, difficult to tie to network simulation programs because they use terminal voltage as an input. Generally, it is more convenient to use current as the input to the machine simulation and accept voltage as the output. Further, it is difficult to handle unbalanced situations with this set of equations.
An alternative to this set would be to employ the phase currents as state variables. Effectively, this replaces ψd, ψq and ψ0 with ia, ib, and ic. The resulting model will, as we will show, interface nicely with network simulations.
To start, note that we could write an expression for terminal flux, on the d- axis:
′′ xad||xkdl xad||xfl
ψd = xdid + ψf + ψkd (101) xad||xkdl + xfl xad||xfl + xkdl
and here, of course, ′′ xd = xal + xad||xkdl||xfl
This leads us to define a “flux behind subtransient reactance”:
′′ xadxkdlψf + xadxflψkd
ψd = (102) xadxkdl + xadxfl + xkdlxfl
So that ′′ ′′ ψd = ψd + xdid
On the quadrature axis the situation is essentially the same, but one step easier if there is only one quadrature axis rotor winding:
′′ ψq = xq iq + ψkq xaq
(103) xaq + xkql
where ′′ x = xal + xaq||xkql q
′′ ′′ Very often these fluxes are referred to as “voltage behind subtransient reactance, with ψ = eqd ′′ ′′ and ψq = −ed. Then:
′′ ′′ ψd = xdid + eq (104) ′′ ′′ ψq = xq iq − ed (105)
Now, if id and iq are determined, it is a bit easier to find the other currents required in the simulation. Note we can write:
[ ] [ ] [ ] [ ] ψkd
ψf =
xkd
xad
xad
xf
ikd
if +
xad
xad id (106)
and this inverts easily:
[ ] [ ]
−1 ([ ] [ ] ) ikd xkd xad ψkd xad = − id (107) if xad xf ψf xad
14

The quadrature axis rotor current is simply:
ikq =1 ψkq − xaq
iq (108) xkq xkq
The torque equation is the same, but since it is usually convenient to assemble the fluxes behind subtransient reactance, it is possible to use:
′′ ′′ ′′ ′′ Te = eq iq + edid + (xd − xq)idiq (109)
Now it is necessary to consider terminal voltage. This is most conveniently cast in matrix notation. The vector of phase voltages is:
va
vph =
vb (110) vc
Then, with similar notation for phase flux, terminal voltage is, ignoring armature resistance:
1 dψ ph
=vph ω0 dt 1 d
= T −1ψ (111) dq ω0 dt
Note that we may define the transformed vector of fluxes to be:
′′ ′′ ψ dq
= x idq + e (112)
where the matrix of reactances shows orthogonality:
′′
x 0 0d
x ′′ = 0 x ′′ q 0
(113)
0 0 x0
and the vector of internal fluxes is:
′′ eq
′′ ′′ e =
−ed (114)
0
Now, of course, idq = Tiph, so that we may re-cast (111) as:
1 d ′′ ′′ vph = T −1 x Tiph + T −1 e (115)
ω0 dt
Now it is necessary to make one assumption and one definition. The assumption, which is only moderately restrictive, is that subtransient saliency may be ignored. That is, we assume
′′ ′′ that xd = xq . The definition separates the “zero sequence” impedance into phase and neutral components:
15

′′ x0 = xd + 3xg (116)
Note that according to this definition the reactance xg accounts for any impedance in the neutral of the synchronous machine as well as mutual coupling between phases.
Then, the impedance matrix becomes:
′′ x 0 0 0 0 0d
′′ ′′ x =
0 xd 0 +
0 0 0 (117)
′′ 0 0 xd 0 0 3xg
In compact notation, this is:
′′ ′′ x = xdI + x (118) g
where I is the identity matrix. Now the vector of phase voltages is:
1 d ′′ ′′ vph = xdiph + T −1 x T iph + T −1 e (119)
gω0 dt
Note that in (119), we have already factored out the multiplication by the identity matrix. The next step is to carry out the matrix multiplication in the third term of (119). This operation turns out to produce a remarkably simple result:
1 1 1
T −1 x T = xg 1 1 1 (120)
g 1 1 1
The impact of this is that each of the three phase voltages has the same term, and that is related to the time derivative of the sum of the three currents, multiplied by xg.
The third and final term in (119) describes voltages induced by rotor fluxes. It can be written as:
1 d ′′
1 d 1 de ′′ ′′ T −1 T −1 e = e + T −1 (121)
ω0 dt ω0 dt ω0 dt Now, the time derivative of the inverse transform is:
− sin(θ) − cos(θ) 0
1 d ω 2π
T −1 = − sin(θ − 23
π ) − cos(θ − 3 ) 0 (122)
2πω0 dt ω0 − sin(θ + 23 π ) − cos(θ + 3 ) 0
Now the three phase voltages can be extracted from all of this matrix algebra:
′′ x dia xg dd ′′ va = + (ia + ib + ic) + e (123) ω0 dt ω0 dt
a
′′ x dib xg dd ′′ vb = + (ia + ib + ic) + e (124) ω0 dt ω0 dt
b
′′ x dic xg dd ′′ vc = + (ia + ib + ic) + e (125) ω0 dt ω0 dt
c
16

Where the internal voltages are:
′′ ω
′′ ′′ e = − (eq sin(θ) − ed cos(θ)) a ω0 ′′ ′′ 1
+ cos(θ) de q
+ 1
sin(θ) de d (126)
ω0 dt ω0 dt 2π
′′ 2π
′′ ω
′′ eb = − (eq sin(θ − ) − ed cos(θ − )) ω0 3 3
′′ ′′ 1 + cos(θ − 2π
) de q
+ 1
sin(θ − 2π ) de d (127)
ω0 3 dt ω0 3 dt 2π
′′ 2π
′′ ω
′′ e = − (eq sin(θ + ) − ed cos(θ + )) c ω0 3 3 ′′ ′′ 1
+ cos(θ +2π
) de q
+ 1
sin(θ +2π
) de d (128)
ω0 3 dt ω0 3 dt
This set of expressions describes the equivalent circuit shown in Figure 4.
′′ ′′ eaia xd
va ∩∩∩∩ + −
′′ ′′ ebib xd xg
vb ∩∩∩∩ + − ∩∩∩∩ ′′
′′ ecic xd vc ∩∩∩∩ + −
Figure 4: Equivalent Network Model
10 Restatement Of The Model
The synchronous machine model which uses the three phase currents as state variables may now be stated in the form of a set of differential and algebraic equations:
dψkd = −ω0rkdikd (129)
dt dψkq
= −ω0rkqikq (130) dt dψf
= −ω0rf if (131) dt dδ
= ω − ω0 (132) dt
17

( ) dω ω0 ′′ ′′ = Tm + eq iq + edid (133) dt 2H
where: [ ] [ ]
−1 ([ ] [ ] ) ikd xkd xad ψkd xad = − idif xad xf ψf xad
and
ikq =1 ψkq − xaq
iqxkq xkq
(It is assumed here that the difference between subtransient reactances is small enough to be neglected.)
The network interface equations are, from the network to the machine:
2π 2π id = ia cos(θ) + ib cos(θ − ) + ic cos(θ + ) (134)
3 3 2π 2π
iq = −ia sin(θ) − ib sin(θ − ) − ic sin(θ + ) (135) 3 3
and, in the reverse direction, from the machine to the network:
′′ ω
′′ ′′ e = − (eq sin(θ) − ed cos(θ)) a ω0 ′′ ′′ 1
+ cos(θ) de q
+ 1
sin(θ) de d (136)
ω0 dt ω0 dt 2π
′′ 2π
′′ ω
′′ eb = − (eq sin(θ − ) − ed cos(θ − )) ω0 3 3
′′ ′′ 1 + cos(θ − 2π
) de q
+ 1
sin(θ − 2π ) de d (137)
ω0 3 dt ω0 3 dt 2π
′′ 2π
′′ ω
′′ e = − (eq sin(θ + ) − ed cos(θ + )) c ω0 3 3 ′′ ′′ 1
+ cos(θ +2π
) de q
+ 1
sin(θ +2π
) de d (138)
ω0 3 dt ω0 3 dt
And, of course,
θ = ω0t + δ (139) ′′ ′′ eq = ψd (140) ′′ ′′ ed = −ψq (141)
′′ xadxkdlψf + xadxflψkd
ψd = (142) xadxkdl + xadxfl + xkdlxfl
′′ xaq
ψ = ψkq (143) q xaq + xkql
18

11 Network Constraints
This model may be embedded in a number of networks. Different configurations will result in different constraints on currents. Consider, for example, the situation in which all of the terminal voltages are constrained, but perhaps by unbalanced (not entirely positive sequence) sources. In that case, the differential equations for the three phase currents would be:
′′ ′′ x dia ′′ x + 2xg [
d d ′′ ′′ ] xg
= (va − ea) ′′ − (vb − eb ) + (vc − ec ) ′′
(144) ω0 dt x + 3xg x + 3xgd d ′′ ′′ x dib ′′
x + 2xg [
d d ′′ ′′ ] xg
= (vb − eb ) ′′ − (va − ea) + (vc − ec ) ′′
(145) ω0 dt x + 3xg x + 3xgd d ′′ ′′ x dic ′′
x + 2xg [
d d ′′ ′′ ] xg
= (vc − ec ) ′′ − (vb − eb ) + (va − ea) ′′
(146) ω0 dt x + 3xg x + 3xgd d
12 Example: Line-Line Fault
We are not, however, constrained to situations defined in this way. This model is suitable for embedding into network analysis routines. It is also possible to handle many different situations directly. Consider, for example, the unbalanced fault represented by the network shown in Figure 5. This shows a line-line fault situation, with one phase still connected to the network.
′′ eia ′′ a ra xd
va ∧ ∧ ∧ ∩∩∩∩ + −∨ ∨
′′ ebib x ′′ xg ra d ∧ ∧ ∧ ∩∩∩∩ + − ∩∩∩∩ ∨ ∨
′′ e ra
x ′′ c d
∧ ∧ ∧ ∩∩∩∩ + −∨ ∨
Figure 5: Line-Line Fault Network Model
In this situation, we have only two currents to worry about, and their differential equations would be:
dib ω0 ′′ ′′ = ′′ (e − eb − 2raib) (147)
dt 2x c d
dia ω0 ′′ = ′′
(va − e − raia) (148) dt xd + xg
a
and, of course, ic = −ib. Note that here we have included the effects of armature resistance, ignored in the previous
section but obviously important if the results are to be believed.
19

13 Permanent Magnet Machines
Permanent Magnet machines are one state variable simpler than their wound-field counterparts. They may be accurately viewed as having constant field current. Assuming that we can define the internal (field) flux as:
ψ0 = xadif0 (149)
13.1 Model: Voltage Driven Machine
We have a reasonably simple expression for the rotor currents, in the case of a voltage driven machine:
[ ] [ ]
−1 [ ] id
ikd =
xd
xad
xad
xkd
ψd − ψ0
ψkd − ψ0 (150)
[ ] [ ]
−1 [ ] iq ikq
= xq
xaq
xaq
xkq
ψq
ψkq (151)
The simulation model then has six states:
dψd = ω0vd + ωψq − ω0raid (152)
dt dψq
= ω0vq − ωψd − ω0raiq (153) dt
dψkd = −ω0rkdikd (154)
dt dψkq
= −ω0rkqikq (155) dt dω ω0
= (ψdiq − ψqid + Tm) (156) dt 2H dδ
= ω − ω0 (157) dt
13.2 Curent-Driven Machine Model
In the case of a current-driven machine, rotor currents required in the simulation are:
1 ikd = (ψkd − xadid − ψ0) (158)
xkd
1 ikq = (ψkq − xaqiq) (159)
xkq
Here, the “flux behind subtransient reactance” is, on the direct axis:
′′ xkdlψ0 + xadψkd
ψd = (160) xad + xkdl
and the subtransient reactance is: ′′ xd = xal + xad||xkdl (161)
20

( )
On the quadrature axis,
ψ ′′ = xadψkq
(162) q xad + xkql
and ′′ x = xal + xaq||xkql (163) q
In this case there are only four state equations:
dψkd = −ω0rkdikd (164)
dt dψkq
= −ω0rkqikq (165) dt dω ω0 ′′ ′′ = eq iq + edid + Tm (166) dt 2H dδ
= ω − ω0 (167) dt
The interconnections to and from the network are the same as in the case of a wound-field machine: in the “forward” direction, from network to machine:
2π 2π id = ia cos(θ) + ib cos(θ − ) + ic cos(θ + ) (168)
3 3 2π 2π
iq = −ia sin(θ) − ib sin(θ − ) − ic sin(θ + ) (169) 3 3
and, in the reverse direction, from the machine to the network:
′′ ω
′′ ′′ e = − (eq sin(θ) − ed cos(θ)) a ω0 ′′ ′′ 1
+ cos(θ) de q
+ 1
sin(θ) de d (170)
ω0 dt ω0 dt 2π
′′ 2π
′′ ω
′′ eb = − (eq sin(θ − ) − ed cos(θ − )) ω0 3 3
′′ ′′ 1 + cos(θ − 2π
) de q
+ 1
sin(θ − 2π ) de d (171)
ω0 3 dt ω0 3 dt 2π
′′ 2π
′′ ω
′′ e = − (eq sin(θ + ) − ed cos(θ + )) c ω0 3 3 ′′ ′′ 1
+ cos(θ +2π
) de q
+ 1
sin(θ +2π
) de d (172)
ω0 3 dt ω0 3 dt
13.3 PM Machines with no damper
PM machines without much rotor conductivity may often behave as if they have no damper winding at all. In this case the model simplifies even further. Armature currents are:
1 id = (ψd − ψ0) (173)
xd
1 iq = ψq (174)
xq
21

The state equations are:
dψd = ω0vd + ωψq − ω0raid (175)
dt dψq
= ω0vq − ωψd − ω0raiq (176) dt dω ω0
= (ψdiq − ψqid + Tm) (177) dt 2H dδ
= ω − ω0 (178) dt
13.4 Current Driven PM Machines with no damper
In the case of no damper the machine becomes quite simple. There is no “internal flux” on the quadrature axis. Further, there are no time derivatives of the internal flux on the d- axis. The only machine state equations are mechanical:
dω ω0 = (ψ0iq + Tm) (179)
dt 2H dδ
= ω − ω0 (180) dt
The “forward” network interface is as before:
2π 2π id = ia cos(θ) + ib cos(θ − ) + ic cos(θ + ) (181)
3 3 2π 2π
iq = −ia sin(θ) − ib sin(θ − ) − ic sin(θ + ) (182) 3 3
and, in the reverse direction, from the machine to the network, things are a bit simpler than before:
ω′′ e = − ψ0 sin(θ) (183) a ω0
ω 2π′′ eb = − ψ0 sin(θ − ) (184)
ω0 3 ω 2π
′′ e = − ψ0 sin(θ + ) (185) c ω0 3
(186)
22

Characterization of Left-Handed Materials
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
1. How are they realized?
2. Why the denomination “Left-Handed”?
3. What are their properties?
4. Does it really work?
It has already been shown (see previous classes) that rings, or split-rings, can realize a
negative permeability (µ < 0) over a certain frequency band.
In addition to this, we need to realize a negative permittivity (ε < 0).
It has also been shown (see previous classes) that:
• lossless:
εmetal = 1−ω2p
ω2, where ωp =
ne2
ε0me
(n: electron density, e: electron charge, me: effective mass of electrons).
• lossy:
εmetal = 1−ω2p
ω(ω + iγ).
A typical transmission curve looks like shown in Fig. 1.
PSfrag replacements
1
T
ωωp
no transmission
(ε < 0) transmission
(ε > 0)
Figure 1: Transmission curve for a plasma-like medium.
.
1

2 Section 2. Why “left-handed”?
With these characteristics, ε < 0 has been realized already at infrared frequencies (where
metals behave like plasmas).
Problem: how to realize it at GHz frequencies?
Solution: by reducing n, the electron density.One way of doing this is to confine the electrons in space. This can be achieved by an array
of rods for example, as shown in Fig. 2.
PSfrag replacements
ar
Figure 2: Array of rods confining the electrons in space.
Note: it is important that the wires are thin, so as to reduce the radiation interaction and
allow penetration into the structure.
Effect of the wires: to reduce n to
neff = nπr2
a2. (1)
Finally, note also that the rods have to be parallel to the electric field. This, plus the (known
already) fact that rings have to be perpendicular to the magnetic field, gives an idea on how to
realize physically LH metamaterials (see Fig. 3).
2 Why “left-handed”?
At this point, we have a metamaterial which can realize
ε < 0, µ < 0 . (2)
We shall now see what does it imply on the electromagnetic fields.
Let us write Maxwell’s curl equations for plane wave solutions and time harmonic notations:
k × E(r) = ωµH(r) , (3a)
k × H(r) =− ωεE(r) . (3b)

3
5 mm
FRONT BACK
1.3 cm
0.5 mm
z
x
y
x
εs
1 mm
εs
(a)
(b)
Figure 3: A realization for LH material.
In standard materials, Eq. (3) implies that the tryad (E, H, k) forms a right-handed system.
However, under Eq. (2), we will have:
(E, H, k) form a left-handed (LH) tryad.
However, the time average Poynting power is still
< S(r) >=1
2<E(r)× H?(r) (4)
and remains in the same direction so that we have the set up shown in Fig. 4.
Characteristics:
• k is in the phase velocity direction.
• phase velocity and energy flux are in opposite directions.
3 Properties of LH media
Some know characteristics are:
• Reversed Doppler effect (track the phase),
• Reversed Cerenkov radiation (cf. 6.632),

4 3.1 Reversed Snell’s law
PSfrag replacements
E
H
k S
Figure 4: Electric field (E), magnetic field (H), wave-vector (k) and Poynting power
(S) in an LH medium.
• Negative index of refraction.
This last item is very significant, and we shall spend some time discussing it.
The index of refraction of a medium is defined as
n =√εr µr , (5)
or, writing explicitly the frequency dependence (cf. later),
n(ω) =√
εr(ω)µr(ω) . (6)
For those frequencies inside the left-handed band (i.e. in the band where ε < 0 and µ < 0),
we can write:
ε(ω) < 0 ⇒ ε(ω) = |ε(ω)| eiπ , (7a)
µ(ω) < 0 ⇒ µ(ω) = |µ(ω)| eiπ , (7b)
Eventually, we write n from Eq. (6):
n =√
|ε(ω)µ(ω)| eiπ = −√
|ε(ω)µ(ω)| . (8)
3.1 Reversed Snell’s law
An important consequence of this fact is the reversal of Snell’s law.
• Ray diagram:

5
PSfrag replacementsθi
θr−θr
n > 0
n < 0
• k diagram for an LH medium:
PSfrag replacements
S
kxkx
k1z k2z
k1 k2
3.2 Energy
Traditionally, the energy is given by
W = εE2 + µH2 . (9)
What happens if ε < 0 and µ < 0? Is W < 0?
Actually no, but this direct conclusion from Eq. (9) shows that this equation is not valid
as is. In fact, these materials have to be modeled by frequency dispersive permittivity and
permeability.
In that case, the relation of Eq. (9) becomes (from Poynting’s theorem):
W =∂(εω)
∂ωE2 +
∂(µω)
∂ωH2 (10)
and we must have:
∂(εω)
∂ω> 0 , (11a)
∂(µω)
∂ω> 0 . (11b)

6 3.3 Properties of an LHM slab
When LH materials are studies as bulk materials, two models are commonly used for the
permittivity/permeability:
1. Drude model:
εr = 1−ω2ep
ω(ω + iγe), (12a)
µr = 1−ω2mp
ω(ω + iγm), (12b)
which is schematically represented in Fig. 5.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−50
−40
−30
−20
−10
0
10
w/w0
Real(eps/eps0)
wp = 100 GHzwp = 266.5 GHzwp = 500 GHzwp = 1000 GHz
(a) <(ε).
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
w/w0
Imag(eps/eps0)
wp = 100 GHzwp = 266.5 GHzwp = 500 GHzwp = 1000 GHz
(b) =(ε).
Figure 5: Permittivity for various values of ωep in the Drude model (f0 = 30 GHz,
ωep = ωp).
2. Resonant model:
εr = 1−ω2ep − ω2eo
ω2 − ω2eo + iγeω, (13a)
µr = 1−ω2mp − ω2mo
ω2 − ω2mo + iγmω, (13b)
where ω(em)o are the electric/magnetic resonant frequencies and ω(em)p are the elec-
tric/magnetic plasma frequencies. An illustration of this model is given in Fig. 6.
3.3 Properties of an LHM slab
Let us consider the situation depicted in Fig. 7.

7
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−100
−80
−60
−40
−20
0
20
40
60
80
100
w/w0
Real(eps/eps0)
wp = 266.5 GHzwp = 500 GHz
(a) <(ε).
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
w/w0
Imag(eps/eps0)
wp = 266.5 GHzwp = 500 GHz
(b) =(ε).
Figure 6: Permittivity for various values of ωep in the resonant model of Eq. (13a)
(f0 = 30 GHz, ωep = ωp, ω0 = 100GHz).
PSfrag replacements
x
y z
Figure 7: LH slab in free-space.

8 3.3 Properties of an LHM slab
Let us consider the case for which εr = µr = −1 (working at the right frequency).
1. From simple ray diagrams, using the reversed Snell’s law:
PSfrag replacements
#0 #1 #2
x
z
d
S
I1
I2
We see that is the source is close enough to the slab (distance< d), the slab will produce
two images, one inside the slab and one outside.
The distance from source to the second image is
S − I2 = 2d .
2. Rigorous calculation:
Let us consider a TE wave impinging on this slab. We write, for a single interface:
E0 =yE0 eikxx−iωt[eikzz + re−ikzz] , (14a)
E1 =yE0 eikxx−iωt teik
′
zz . (14b)
We need to match the boundary conditions and, for simplicity, we set the boundary to be
at z = 0. We get:
• Tangential E field:
eikzz + re−ikzz = teik′
zz .
• Tangential H field (H = 1iωµ
∇× E):
eikzz − re−ikzz =µ0k
′
z
µ1kzteik
′
zz .
Upon solving, we get the reflection/transmission coefficient from free-space to the medium:
t =2µ1kz
µ1kz + µ0k′z, (15a)
r =µ1kz − µ0k
′
z
µ1kz + µ0k′z. (15b)

9
In a similar way, the reflection/transmission coefficients from the medium to free-space are:
t′ =2µ0k
′
z
µ1kz + µ0k′z, (16a)
r′ =µ0k
′
z − µ1kz
µ1kz + µ0k′z. (16b)
In order to obtain the field inside the slab, we shall compute the transmission coefficient as:
T = teik′
zd t′ + teik′
zd r′eik′
zd r′eik′
zd t′ + tt′(r′2)2e5ik
′
zd + · · ·
= tt′eik′
zd∞
∑
n=0
(r′2)n e2ink
′
zd =tt′eik
′
zd
1− r′2e2ik′
zd. (17)
Using the previous expressions, we obtain
T =4µµ1kzk
′
zeik′
zd
(µ1kz + µ0k′z)2 − (µ0k′z − µ1kz)e2ik
′
zd. (18)
For the specific case of εr = µr = −1:
T =−4kzk
′
zeik′
zd
(−kz + k′z)2 − (k′z + kz)e2ik
′
zd. (19)
At this point, we need to define kz and k′z:
Propagating waves (k > kρ) Evanescent waves (k < kρ)
kz kz =√
k2 − k2ρ kz = i√
k2ρ − k2
k′z k′z = −√
k2 − k2ρ k′z = i√
k2ρ − k2
Relation k′z = −kz k′z = kz
Performing the calculation, we get:
• Propagating waves (k′z = −kz):
T =4k2ze
−ikzd
4k2z= e−ikzd .
• Evanescent waves (k′z = kz):
T =−4k2ze
ikzd
−4k2ze2ikzd
= e−ikzd .

10 Section 4. Does it really work?
Therefore, for all waves, we get:
T = e−ikzd . (20)
Conclusions:
• Evanescent waves are amplified by the medium.
• Propagating waves are “backward waves”.
• Taking an infinite amount of those creates a source.
• Two images can be formed, like shown in the ray diagram of the previous subsection.
4 Does it really work?
The theoretical predictions have been verified in experiments.
To date, essentially two experiments have been done:
1. Prism,
2. Gaussian beam.
4.1 Prism experiment
First experiment (2001). Later reproduced.
PSfrag replacementsRHM
LHM
4.2 Gaussian beam experiment
First publication was theoretical. Later experiments followed, but still need to be improved.

11
PSfrag replacements
RHM
LHM

Dispertion relations in Left-Handed Materials
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
We know already the following properties of LH media:
1. εr and µr are frequency dispersive.
2. εr and µr are negative over a similar frequency band.
3. The tryad (E, H, k) is left-handed.
4. The index of refraction is negative.
From the past lectures, we know that these materials can be realized by a succession of wires
and rods:
• Periodic arrangement of rods: realizes a plasma medium with negative εr over a certain
frequency band. The model for the permittivity is:
εr = 1−ω2ep
ω2 + iγeω. (1)
• Periodic arrangement of rings (split-rings) realizes a resonant µr modeled as
µr = 1−Fω2mp
ω2 − ω2mo + iγmω, (2)
where F is the fractional area of the unit cell occupied by the interior of the split-ring
(F < 1).
In the lossless case (γe = γm = 0), we can rewrite these two relations as:
εr =ω2 − ω2ep
ω2, (3a)
µr =ω2 − ω20 − Fω2
ω2 − ω20= (1− F )
ω2 − ω2bω2 − ω20
, (3b)
where ωb = ω0/√1− F > ω0. Therefore:
k2 = ω2εµ =1
c(1− F )
(ω2 − ω2ep)(ω2 − ω2b )
ω2 − ω20. (4)
Upon identifying the regions where εr and µr change signs, we can immediately get the
relation for k:
1

2 Section 2. Argument on n < 0
PSfrag replacements
ω ω0 ωb ωp
εr
µr
k2 ++
+++
+
−−
−
−− −
The region ω ∈ [ω0, ωb], which also corresponds to εr < 0 and µr < 0, corresponds to
k2 positive, which means k real. Therefore, there is propagation in this band, but not in the
adjacent ones.
It may still not be clear that k is negative, even if we write
k = ω2√εµ = ω2
√
ε20µ20
√εrµr = k0n . (5)
A demonstration of the fact that n is negative follows.
2 Argument on n < 0
2.1 Complex Poynting theorem
We shall first recall the derivation of the complex Poynting theorem and the signification of the
various terms.
We start from Maxwell’s curl equation
∇× E = iωB , (6a)
∇× H =− iωD + J . (6b)
Upon multiplying Eq. (6a) by H? and substracting the complex conjugate of Eq. (6b) mul-
tuplied by E we get:
H? · ∇ × E−E · ∇ × H? = ∇ · (E × H?)
= iωB · H? − iωD? · E − J? · E= iω[B · H? − E · D?]− E · J? . (7)
Upon rewriting, we get:
−E · J? = ∇ · (E × H?) + iω[E · D? − B · H?] . (8)
On the right-hand side of the equation, the first terms corresponds to the divergence of
Poyting power, which is therefore positive. The second term relates to the complex EM energy,
and is therefore also positive. Consequently, the left-hand side term must also be positive, and
actually corresponds to the power supplied by J to the volume.
We shall use this result hereafter.

3
2.2 1D wave equation
For the sake of simplification, let us work with a 1D problem. The wave equation
∇2E(r) + k2E(r) = −iωµJ(r) , (9)
is rewritten with
E(r) = z E(x) , (10a)
J(r) = z j0δ(x− x0) , (10b)
to yield∂2
∂x2E(x) + k2E(x) = −iωµj0δ(x− x0) . (11)
The solution to this equation is
E(x) = α eik|x−x0| , (12)
where α needs to be determined. From Eq. (12), we write:
1. First derivative:∂E(x)
∂x= αik
∂
∂x2|x− x0| eik|x−x0| . (13)
2. Second derivative:
∂2E(x)
∂x2=αik
∂2
∂x2|x− x0| eik|x−x0| + α(−k2)( ∂
∂x2|x− x0|)2 eik|x−x0|
= −αk2 eik|x−x0| + 2iαkδ(x− x0) . (14)
Therefore:
∂2E(x)
∂x2+ k2E(x) =2iαkδ(x− x0) = 2iα k0 n δ(x− x0) . (15)
Comparing Eq. (11) to Eq. (15), we get
α = −ωµj0
2k0 n= −j0 η0
2
µr
n, (16)
so that finally the solution is:
E(x) = −j0 η0
2
µr
neik|x−x0| . (17)
If we now compute the power supplied by the current J to the volume:
P = −1
2
∫
V
E · J? dV =η0 j
20
4
µr
n> 0 . (18)
The source must, on average, do positive work on the field. Yet, in LH regime, we have
µr < 0 so that we must have n < 0 as well.

4 Section 3. Dispersion relations
Finally, we can also write the E field as:
E(x, t) = −η
2j0 e
i(k0n|x−x0|−ωt) . (19)
Thus, plane waves appear to propagate from −∞ and +∞ to the source, seemingly running
backward in time. Yet, the work done on the field is positive so clearly the energy propagates
outward from the source.
3 Dispersion relations
At this point, we know that n < 0 and k < 0. The difference between phase and group velocity
can be directly seen on the dispersion relation diagram.
vφ =ω
kz, (20a)
vg =
(
∂kz
∂ω
)
−1
. (20b)
• Free-space: k = ω√εµ where ε = cte and µ = cte.
• Metamaterial:
Let us take the following models
εr =1−ω2p
ω2 + iγeω, (21a)
µr =1−ω2mp − ω2mo
ω2 − ω2mo + iγmω, (21b)
3.1 Lossless case (γe = γm = 0), ωmp = ωp
We rewrite
εr =ω2 − ω2p
ω2, (22a)
µr =ω2 − ω2mp
ω2 − ω2mo
, (22b)
(22c)
and plot the relations with

5
ωp = 20e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 0
−20
2
x 10−6
−2
0
2
x 10−6
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
0.5
1
1.5
2
2.5
3x 10
−6
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
−50
0
50
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
−200
−100
0
100
200
300
ω [rad/s]µ r
Relative permeability
−3 −2 −1 0 1 2 3
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 0)
kz
ω [r
ad/s
]

6 3.1 Lossless case (γe = γm = 0), ωmp = ωp
Other cases follow.
ωp = 30e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 0 rad/s
−20
2x 10
−6−20
2x 10
−6
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
1
2
3
4x 10
−6
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
−50
0
50
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
−200
−100
0
100
200
300
ω [rad/s]
µ r
Relative permeability
−4 −3 −2 −1 0 1 2 3 4
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 0)
kz
ω [r
ad/s
]

7
ωp = 30e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 10e7 rad/s
−20
2x 10
−6−20
2x 10
−6
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
1
2
3
4x 10
−6
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
−50
0
50
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
−200
−100
0
100
200
300
ω [rad/s]
µ r
Relative permeability
−4 −3 −2 −1 0 1 2 3 4
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 100000000)
kz
ω [r
ad/s
]

8 3.1 Lossless case (γe = γm = 0), ωmp = ωp
ωp = 30e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 10e8 rad/s
−20
2
x 10−6
−2
0
2
x 10−6
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
0.5
1
1.5
2
2.5x 10
−6
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
−50
0
50
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
−40
−20
0
20
40
60
ω [rad/s]
µ r
Relative permeability
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 1000000000)
kz
ω [r
ad/s
]

9
ωp = 30e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 10e9 rad/s
−20
2
x 10−7
−20
2
x 10−7
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
0.5
1
1.5
2
2.5
3x 10
−7
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
−8
−6
−4
−2
0
2
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
−5
0
5
10
15
20
ω [rad/s]
µ r
Relative permeability
−4 −3 −2 −1 0 1 2 3 4
x 10−7
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 1.000000e+10)
kz
ω [r
ad/s
]

10 3.1 Lossless case (γe = γm = 0), ωmp = ωp
ωp = 30e9 rad/s
ωmp = 20e9 rad/s
ωmo = 5e9 rad/s
γe = γm = 10e10 rad/s
−4−2
02
4
x 10−7
−4−2
02
4
x 10−7
0
2
4
x 1010
kx
kz
ω [r
ad/s
]
k surface
0 1 2 3 4
x 1010
0
1
2
3
4
5x 10
−7
ω [rad/s]
k
Dispersion relation
0 1 2 3 4
x 1010
0.96
0.962
0.964
0.966
ω [rad/s]
ε r
Relative permittivity
0 1 2 3 4
x 1010
0.96
0.962
0.964
0.966
ω [rad/s]
µ r
Relative permeability
−5 −4 −3 −2 −1 0 1 2 3 4 5
x 10−7
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
10 k surface (Gamma= 1.000000e+11)
kz
ω [r
ad/s
]

11
Plotting all the 3D curves on the same scale:
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 0)
kx
ω [r
ad/s
]
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 10000000)
kx
ω [r
ad/s
]
!#"$&%'#(*)+,
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 100000000)
kx
ω [r
ad/s
]
.-/0 !#"#1&%2'(*)+,
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 1000000000)
kx
ω [r
ad/s
]
.34 !#"5&%'#(*)+,
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 1.000000e+10)
kx
ω [r
ad/s
]
.6*7 !#"8&%2'(*)+,
−5
0
5x 10
−6 −50
5
x 10−6
0
0.5
1
1.5
2
2.5
3
3.5
4
x 1010
kz
k surface (Gamma= 1.000000e+11)
kx
ω [r
ad/s
]
90 !#":!&%'()+,;=< >@?4ACBED@F&G&H IJ@KLI2H M/NOLK#P Q:RSH M/NT LKQCP7UWVYX M/LZ:QCLH M/[@I\Z:QCP [WKI=MCXP MIIK#I\]7^=_\`WKba0MWc*K#P I&QCLKCdeSfhgji&kElYmnWo T lYm=prq ] l VS^ts fgui&k T l\mvn kElYmvw V o T lYm&kElYmvw pq ] l Vxzy=`KLSK l n g|//~LSQ/c@:Ix l vn gC/~ LSQ/c@:Ix l v=w gC~ LSQ/c@:I^

12 3.1 Lossless case (γe = γm = 0), ωmp = ωp
For simplicity, we can study the lossy case for γe = γm amd ωmo = 0 (although we don’t
really simulate the same medium, the fundamental behavior is similar, and simpler to carry out
mathematically).
The model therefore reads:
εr = µr =ω2 − ω2p + iγω
ω2 + iγω. (23)
We compute:
√εrµr =
ω2 − ω2p + iγω
ω2 + iγω
=[ω2 − ω2p + iγω] [ω2 − iγω]
ω4 + γ2ω2
=ω2(ω2 − ω2p) + γ2ω2 + iγωω2p
ω4 + γ2ω2.
(24a)
The real part is given by:
<√εrµr =ω2[ω2 − (ω2p − γ2)]
ω4 + γ2ω2. (25)
Losses have the effect to lower the plasma frequency to
ωp′ =√
ω2p − γ2 . (26)
In addition, we also see that if γ is very large, the plasma effect will completey dissapear
(cf. dispersion relation for γ = 10e10 rad/s).

Green’s functions for planarly layered media
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction: Green’s functions
The Green’s functions is the solution of the wave equation for a point source (dipole). For scalar
problems, the wave equation is written as (k0 = ω√εµ):
(∇2 + k20) g(r, r′) = −δ(r − r′) , (1)
and the solution for an unbounded medium is:
g(r, r′) =eik0|r−r
′|
4π|r − r′| . (2)
From Maxwell’s equations in frequency domain with an eiωt dependency, the wave equation
for electric field E(r) is:
∇×∇× E(r)− k20E(r) = iωJ(r) ,
= 0 for source free case . (3)
Therefore, the free-space dyadic Green’s function satisfies
∇×∇×G(r, r′)− k20G(r, r′) = I δ(r − r′) , (4)
which solution is
G(r, r′) =
(
I +1
k20∇∇
)
g(r, r′) , (5)
(check using ∇×∇× (Ig) = ∇∇g −∇ · (∇g)I and Eq. (1)).
For the use of Green’s functions in scattering problems, it is useful to express the Green’s
function in the same coordinates as the problem, which can be rectangular, cylindrical, spherical,
etc. Here we shall concentrate on the rectangular representation (Cartesian).
1

2 Section 2. Cartesian coordinates
2 Cartesian coordinates
2.1 Scalar Green’s function
The formulae are derived from Eq. (1) and the Fourier transform of the quantities:
g(r, r′) =1
(2π)3
∫∫∫ +∞
−∞
dk eik·(r−r′) g(k) , (6a)
δ(r − r′) =1
(2π)3
∫∫∫ +∞
−∞
dk eik·(r−r′) , (6b)
where k = kxx+ kyy + kz z and dk = dkxdkydkz.
Upon using Eq. (1), we write:
(∇2 + k20)
∫∫∫ +∞
−∞
dk eik·(r−r′) g(k) = −
∫∫∫ +∞
−∞
dk eik·(r−r′) , (7)
Introducing the differential operator (∇2 = ∂2
∂x2 + ∂2
∂y2 + ∂2
∂z2 ) we write:
(∇2 + k20)
∫∫∫ +∞
−∞
dk eik·(r−r′) g(k) =
∫∫∫ +∞
−∞
dk (∇2 + k20)eik·(r−r′) g(k)
=
∫∫∫ +∞
−∞
dk (−k2x − k2y − k2z + k20)eik·(r−r′) g(k)
= −∫∫∫ +∞
−∞
dk eik·(r−r′) , (8)
from which we conclude that
g(k) =1
k2x + k2y + k2z − k20. (9)
Using Eq. (6a), we therefore need to evaluate the following integral:
g(r, r′) =1
(2π)3
∫∫∫ +∞
−∞
dkxdkydkz1
k2x + k2y + k2z − k20eik·(r−r
′) . (10)
Note that Eq. (10) can be integrated along one of the three axis. In remote sensing applica-
tion, the vertical axis is usually taken to be the z axis, (xy) being the transverse plane (planar
components). We therefore choose to evaluate Eq. (10) along kz, and we split:
k = kxx+ kyy + kz z = k⊥ + kz z , (11a)
r = r⊥ + zz , (11b)
r′ = r′⊥+ z′z . (11c)

3
We will perform the integral of Eq. (10) in the complex plane, using Cauchy’s theorem and
the Residue theorem. Before doing this, we have to be careful not to have divergent integrals.
Since we integrate in kz, the condition is:
limkz→∞
eikzz < +∞ . (12)
If we write kz as kz = k′z + ik′′z (k′z ∈ R, k′′z ∈ R), we see that
• if z > 0, we have to choose k′′z > 0, which means that for complex plane integration, we
need to deform the contour into the upper plane.
• if z < 0, we have to choose k′′z < 0, which corresponds to a deformation into the lower
plane.
In addition, we see from Eq. (10) that the integrand has a pole at
k20z= k20 − k2x − k2y = k20 − k2
⊥. (13)
We therefore need to evaluate Eq. (10) via the Residue theorem.
Calculus: let us just write the integral in dkz for z > 0:
∫ +∞
−∞
1
k2z − k20z
eik·(r−r′) = 2iπ Res
[
1
k2z − k20z
eik·(r−r′)
]
= 2iπ limkz→k0z
kz − k0z
(kz − k0z)(kz + k0z
)eik⊥·(r⊥−r
′
⊥) eikz(z−z′)
= 2iπ1
2k0z
eik⊥·(r⊥−r′
⊥) eik0z
(z−z′) , (14)
so that
g(r, r′) =i
(2π)2
∫∫
∞
−∞
dk⊥1
2k0z
eik⊥·(r⊥−r′
⊥) eik0z
(z−z′) , for z − z′ > 0. (15)
The treatment for z < 0 follows the same reasoning so that we write for all (z − z ′):
∀(z − z′) ∈ R, g(r, r′) =i
(2π)2
∫∫
∞
−∞
dk⊥1
2k0z
eik⊥·(r⊥−r′
⊥) eik0z
|z−z′| . (16)
2.2 Dyadic Green’s function
From Eq. (16) and Eq. (26), we can get the dyadic Green’s functions.
Note that ∇∇ is a dyadic operator (give a dyad when applied to a scalar) and can be
exchanged with the integral sign. In addition, it only applies to the exponential terms so that
we actually need to evaluate:
∇∇[
eik⊥·(r⊥−r′
⊥) eik0z
|z−z′|
]
(17)

4 2.2 Dyadic Green’s function
or, by a simple change of variables:
∇∇[
eik⊥·r⊥ eik0z|z|
]
(18)
Calculus: Let us first consider z > 0 and
∇∇(eik⊥·r⊥ eik0z|z|) = ∇∇ f(x, y, z) . (19)
Various derivatives will be:
• ∂∂x
∂∂xf(x, y, z) = −k2x f(x, y, z) ,
• ∂∂x
∂∂yf(x, y, z) = −kxky f(x, y, z) ,
• . . .
and identically for z < 0. At z = 0 however,
∂2
∂z2eik0z
|z| =∂
∂z
ik0zeik0z
|z| ∂
∂z|z|
= ik0z
ik0zeik0z
|z|
(
∂
∂z|z|)2
+ ik0zeik0z
|z| ∂2
∂z2|z|
= 2ik0zδ(z)− k20z
eik0z|z| . (20)
Using these results, we write:
∂2
∂z2g(r) =
i
(2π)2
∫∫
∞
−∞
dk⊥1
2k0z
eik⊥·r⊥
[
2ik0zδ(z)− k20z
eik0z|z|
]
= − δ(z)
(2π)2
∫∫
∞
−∞
dk⊥ eik⊥·r⊥ − i
8π2
∫∫
∞
−∞
dk⊥ k0zeik⊥·r⊥ eik0z
|z|
= −δ(r)− i
8π2
∫∫
∞
−∞
dk⊥ k0zeik⊥·r⊥ eik0z
|z| . (21)
Again, all the other terms of ∇∇ applied to the integrand give −kk so that the Green’s
function becomes:
G(r, r′) = −zz δ(r)k20
+i
8π2
∫∫
∞
−∞
dk⊥1
k0z
[
I − kk
k20
]
eik·r for z > 0 ,∫∫
∞
−∞
dk⊥1
k0z
[
I − KK
k20
]
eiK·r for z < 0 ,
(22)
where
k = kxx+ kyy + k0zz , (23a)
K = kxx+ kyy − k0zz . (23b)
Some notes:

5
1. The Dirac delta function is known as the singularity of the Green’s function and is impor-
tant in calculating the fields in the source region.
2. The different signs ensure that the integral converges for evanescent waves, i.e. when
k2x + k2y > k20.
3. The square bracket in the expression of the Green’s functions can be expressed in terms
of superposition of TE and TM waves, as we shall see.
2.3 Superposition of TE and TM waves
Based on k, we can form an orthonormal system for TE/TM polarized waves:
TE: e(k0z) =
k × z
|k × z| =1
√
k2x + k2y
[xky − ykx] =1
kρ(xky − ykx) , (24a)
TM: h(k0z) =
1
k0e(k0z
)× k = − k0z
kokρ(xky + ykx) +
kρ
koz . (24b)
The three vectors k, h and e form an orthonormal system, in which:
I = kk + e(k0z)e(k0z
) + h(k0z)h(k0z
) . (25)
After translating to the origin, we get for the dyadic Green’s functions:
G(r, r′) = −zz δ(r)k20
+i
8π2
∫∫
∞
−∞
dk⊥1
k0z
[
e(k0z)e(k0z
) + h(k0z)h(k0z
)
]
eik·(r−r′) for z > z′ ,
∫∫
∞
−∞
dk⊥1
k0z
[
e(−k0z)e(−k0z
) + h(−k0z)h(−k0z
)
]
eiK·(r−r′) for z < z′ ,
(26)
where
e(−k0z) = e(k0z
) , (27a)
h(−k0z) =
e(−k0z)× K
k0. (27b)
(Note that K, e(−k0z) and h(−k0z
) form another orthonormal set of vectors about K).
2.4 Treatment of layered media
Depending upon the medium under study and the location of the source, the kernel of Eq. (26)
will have to be modified. To make it more clear, we can gather the terms in the Green’s function
relative to the source (primed coordinates) and those relative to the source.

6 2.4 Treatment of layered media
G(r,r′)=−zzδ(r)
k20
+ i
8π2
∫∫
∞
−∞dk⊥
1
k0z
[e(k0z) eik·r ] e(k0z
) e−ikr′
+[h(k0z) eik·r ] h(k0z
) e−ikr′
for z > z′ ,∫∫
∞
−∞dk⊥
1
k0z
[e(−k0z) eiK·r ] e(−k0z
) e−iKr′
+[h(−k0z) eiK·r ] h(−k0z
) e−iKr′
for z < z′ ,
(28)
If we now consider a layered medium problem, with an arbitrary number of layers and a
source in the top region (incident wave), we write:
G(r, r′)i0 =i
8π2
∫∫
∞
−∞
dkxdky1
k0z
Ke e(−k0z) e−iK·r
′
+ Kh h(−k0z) e−iK·r
′
(29)
with
1. For z < z′, i = 0:
Ke =e(−k0z) eiK·r +RTE e(k0z
) ek0z eik·r (30a)
Kh =h(−k0z) eiK·r +RTM h(k0z
) ek0z eik·r (30b)
2. For region `, i = `:
Ke =A` e(k`z) eik`·r +B` e(−k`z) eiK`·r (31a)
Kh =C` h(k`z) eik`·r +D` h(−k`z) eiK`·r (31b)
(31c)
3. For region t, i = t:
Ke =TTE e(−ktz) eiKt·r (32a)
Kh =T TM h(−ktz) eiKt·r (32b)
(32c)
where
k`z =√
k2` − k2x − k2y , (33a)
k` =xkx + yky + zk`z , (33b)
K` =xkx + yky − zk`z , (33c)
and the coefficients A`, B`, C` and D` are determined from the boundary conditions.
The boundary conditions apply to the tangential electric and magnetic fields. Thus, in
terms of Green’s functions, we need to satisfy the continuity of z × G(r, r′) and z ×∇ ×

7
G(r, r′). Let us write this at the interface between media (`) and (` + 1), by separating
the TE and TM components:
A` eik`z
z +B` e−ik`z
z = A`+1 eik`z
z +B`+1 e−ik`z
z (34a)
k`z
[
A` eik`z
z −B` e−ik`z
z
]
= kz`+1
[
A`+1 eik`z
z −B`+1 e−ik`z
z
]
(34b)
k`zk`
[
A` eik`z
z −B` e−ik`z
z
]
=kz`+1
k`+1
[
A`+1 eik`z
z −B`+1 e−ik`z
z
]
(34c)
k`z
[
C` eik`z
z +D` e−ik`z
z
]
= kz`+1
[
C`+1 eik`z
z +D`+1 e−ik`z
z
]
(34d)
With the conditions in the first and last layer as:
A0 = RTE , B0 = 1 , C0 = RTM , D0 = 1 , (35a)
At = 0 , Bt = T TE , Ct = 0 , Dt = T TM . (35b)
Before evaluating these coefficients, we can build a recursive scheme to calculate the ampli-
tudes from region ` to region `+ 1.
For example, it is straightforward to build a propagation matrix for TE modes from Eq. (34a)
and (34b):(
A`+1 eikz`+1d`+1
B`+1 e−ikz`+1d`+1
)
= VTE
(
A` eikz`d`
B` e−ikz`d`
)
(36)
A similar procedure of course applied to the TM modes:(
C`+1 eikz`+1d`+1
D`+1 e−ikz`+1d`+1
)
= VTM
(
C` eikz`d`
D` e−ikz`d`
)
(37)
In order to end up the recursive method, we have to express the reflection and transmission
coefficient in the first and last regions, respectively. We shall only illustrated this point here, as
it has been developed in previous classes.
Let us consider a plane wave incident from region 0, with its plane of incidence parallel to
the (xy) plane. All fields vectors are independent on y, so that ∂∂y
= 0 in Maxwell’s equations.
Thus, we can decompose the fields into their TE and TM components. We get in region `:
• TE modes:
H`x =− 1
iωµ`
∂
∂zE`y , (38a)
H`z =1
iωµ`
∂
∂xE`y , (38b)
(
∂2
∂x2+
∂
∂y+ ω2ε`µ`
)
E`y = 0 . (38c)

8 2.4 Treatment of layered media
• TM modes:
E`x =1
iωε`
∂
∂zH`y , (39a)
E`z =− 1
iωε`
∂
∂xH`y , (39b)
(
∂2
∂x2+
∂
∂y+ ω2ε`µ`
)
H`y = 0 . (39c)
For a TE wave inside the stratified medium:
E`y =(A`eik`z
z +B`e−ik`z
z) eikxx , (40a)
H`x =− k`zωµ`
(A`eik`z
z −B`e−ik`z
z) eikxx , (40b)
H`z =kx
ωµ`(A`e
ik`zz +B`e
−ik`zz) eikxx . (40c)
By matching the boundary conditions, and upon using the already known notation
p`(`+1) =µ`kz(`+1)
µ`+1k`z, (41a)
R`(`+1) =1− p`(`+1)
1 + p`(`+1). (41b)
we get the recursive relation:
A`
B`=
e2ik`zd`
R`(`+1)+
[1− 1/R2`(`+1)] e
2i[k(`+1)z+k`z
]d`
1/R`(`+1) e2ik(`+1)z
d` +A`+1
B`+1
, (42)
with the limiting condition:At
Bt= 0, ,
A0
B0= R . (43)
Example: for a two-layer medium (t = 2):
R =R01 +R12e
2ik1z(d1−d0)
1 +R01R12e2ik1z(d1−d0)
e2ikzd0 . (44)

Fundamentals of Model Theory
William Weiss and Cherie DMello
Department of MathematicsUniversity of Toronto
c WWeiss and C DMello


Introduction
Model Theory is the part of mathematics which shows how to apply logic tothe study of structures in pure mathematics On the one hand it is the ultimateabstraction on the other it has immediate applications to everyday mathematicsThe fundamental tenet of Model Theory is that mathematical truth like all truthis relative A statement may be true or false depending on how and where it isinterpreted This isnt necessarily due to mathematics itself but is a consequenceof the language that we use to express mathematical ideasWhat at rst seems like a deciency in our language can actually be shaped into
a powerful tool for understanding mathematics This book provides an introductionto Model Theory which can be used as a text for a reading course or a summerproject at the senior undergraduate or graduate level It is also a primer which willgive someone a self contained overview of the subject before diving into one of themore encyclopedic standard graduate textsAny reader who is familiar with the cardinality of a set and the algebraic closure
of a eld can proceed without worry Many readers will have some acquaintancewith elementary logic but this is not absolutely required since all necessary concepts from logic are reviewed in Chapter Chapter gives the motivating examplesand we recommend that you read it rst before diving into the more technical aspects of Chapter Chapters and are selections of some of the most importanttechniques in Model Theory The remaining chapters investigate the relationshipbetween Model Theory and the algebra of the real and complex numbers Thirtyexercises develop familiarity with the denitions and consolidate understanding ofthe main proof techniquesThroughout the book we present applications which cannot easily be found
elsewhere in such detail Some are chosen for their value in other areas of mathematics Ramseys Theorem the TarskiSeidenberg Theorem Some are chosen fortheir immediate appeal to every mathematician existence of innitesimals for calculus graph colouring on the plane And some like Hilberts Seventeenth Problemare chosen because of how amazing it is that logic can play an important role inthe solution of a problem from high school algebra In each case the derivationis shorter than any which tries to avoid logic More importantly the methods ofModel Theory display clearly the structure of the main ideas of the proofs showinghow theorems of logic combine with theorems from other areas of mathematics toproduce stunning resultsThe theorems here are all are more than thirty years old and due in great part
to the cofounders of the subject Abraham Robinson and Alfred Tarski Howeverwe have not attempted to give a history When we attach a name to a theorem itis simply because that is what mathematical logicians popularly call itThe bibliography contains a number of texts that were helpful in the prepa
ration of this manuscript They could serve as avenues of further study and inaddition they contain many other references and historical notes The more recenttitles were added to show the reader where the subject is moving today All areworth a lookThis book began life as notes for William Weisss graduate course at the Uni
versity of Toronto The notes were revised and expanded by Cherie DMello and

William Weiss based upon suggestions from several graduate students The electronic version of this book may be downloaded and further modied by anyone forthe purpose of learning provided this paragraph is included in its entirety and solong as no part of this book is sold for prot

Contents
Chapter Models Truth and Satisfaction Formulas Sentences Theories and Axioms Prenex Normal Form
Chapter Notation and Examples
Chapter Compactness and Elementary Submodels Compactness Theorem Isomorphisms elementary equivalence and complete theories Elementary Chain Theorem LowenheimSkolem Theorems The LosVaught Test Every complex onetoone polynomial map is onto
Chapter Diagrams and Embeddings Diagram Lemmas Every planar graph can be four coloured Ramseys Theorem The Leibniz Principle and innitesimals Robinson Consistency Theorem Craig Interpolation Theorem
Chapter Model Completeness Robinsons Theorem on existentially complete theories Lindstroms Test Hilberts Nullstellensatz
Chapter The Seventeenth Problem Positive denite rational functions are the sums of squares
Chapter Submodel Completeness Elimination of quantiers The TarskiSeidenberg Theorem
Chapter Model Completions Almost universal theories Saturated models Blums Test
Bibliography
Index

CHAPTER
Models Truth and Satisfaction
We will use the following symbols
logical symbols the connectives called and or not impliesand i respectively
the quantiers called for all and there exists an innite collection of variables indexed by the natural numbers Nv v v
the two parentheses the symbol which is the usual equal sign
constant symbols often denoted by the letter c with subscripts function symbols often denoted by the letter F with subscripts each function symbol is an mplaced function symbol for some natural number m
relation symbols often denoted by the letter R with subscripts each relational symbol is an nplaced relation symbol for some natural number n
We now dene terms and formulas
Definition A term is dened as follows
a variable is a term a constant symbol is a term if F is an mplaced function symbol and t tm are terms then
F t tm is a term a string of symbols is a term if and only if it can be shown to be a term bya nite number of applications of and
Remark This is a recursive denition
Definition A formula is dened as follows
if t and t are terms then t t is a formula if R is an nplaced relation symbol and t tn are terms then Rt tnis a formula
if is a formula then is a formula if and are formulas then so are and if vi is a variable and is a formula then vi and vi are formulas a string of symbols is a formula if and only if it can be shown to be a formulaby a nite number of applications of and
Remark This is another recursive denition is called the negation of is called the conjunction of and is called the disjunction of and
Definition A subformula of a formula is dened as follows

MODELS TRUTH AND SATISFACTION
is a subformula of if is a subformula of then so is if any one of or is a subformula of thenso are both and
if either vi or vi is a subformula of for some natural number i then is also a subformula of
A string of symbols is a subformula of if and only if it can be shown tobe such by a nite number of applications of and
Definition A variable vi is said to occur bound in a formula i for somesubformula of either vi or vi is a subformula of In this case eachoccurance of vi in is said to be a bound occurance of vi Other occurances of viwhich do not occur bound in are said to be free
Exercise Using the previous denitions as a guide dene the substitutionof a term t for a variable vi in a formula
Example
Fv v is a term
vv v v v vv v
is a formula In this formula the variable v occurs bound the variable v occursfree but the variable v occurs both bound and free
Exercise Reconsider Exercise in light of substituting the above term forv in the formula
Definition A language L is a set consisting of all the logical symbols withperhaps some constant function andor relational symbols included It is understood that the formulas of L are made up from this set in the manner prescribedabove Note that all the formulas of L are uniquely described by listing only theconstant function and relation symbols of LWe use tv vk to denote a term t all of whose variables occur among
v vkWe use v vk to denote a formula all of whose free variables occur
among v vk
Example These would be formulas of any language
For any variable vi vi vi for any term tv vk and other terms t and t
t t tv vi t vi vk tv vi t vi vk
for any formula v vk and terms t and tt t v vi t vi vk v vi t vi vk
Note the simple way we denote the substitution of t for vi
Definition A model or structure A for a language L is an ordered pairhA Ii where A is a set and I is an interpretation function with domain the set ofall constant function and relation symbols of L such that if c is a constant symbol then Ic A Ic is called a constant

MODELS TRUTH AND SATISFACTION
if F is an mplaced function symbol then IF is an mplaced function onA
if R is an nplaced relation symbol then IR is an nplaced relation on AA is called the universe of the model A We generally denote models with
Gothic letters and their universes with the corresponding Latin letters in boldfaceOne set may be involved as a universe with many dierent interpretation functionsof the language L The model is both the universe and the interpretation function
Remark The importance of Model Theory lies in the observation that mathematical objects can be cast as models for a language For instance the real numberswith the usual ordering and the usual arithmetic operations addition and multiplication along with the special numbers and can be described as a modelLet L contain one twoplaced ie binary relation symbol R two twoplacedfunction symbols F and F and two constant symbols c and c We build a modelby letting the universe A be the set of real numbers The interpretation functionI will map R to ie R will be interpreted as Similarly IF will be IF will be Ic will be and Ic will be So hA Ii is an example of amodel
We now wish to show how to use formulas to express mathematical statementsabout elements of a model We rst need to see how to interpret a term in a model
Definition The value tx xq of a term tv vq at x xq inthe model A is dened as follows
if t is vi then tx xq is xi if t is the constant symbol c then tx xq is Ic the interpretation of
c in A if t is F t tm where F is an mplaced function symbol and t tmare terms then tx xq is Gtx xq tmx xq where Gis the mplaced function IF the interpretation of F in A
Definition Suppose A is a model for a language L The sequencex xq satises the formula v vq all of whose free and bound variablesare among v vq in the model A written A j x xq provided we have
if v vq is the formula t t then
A j t tx xq means that tx xq equals tx xq
if v vq is the formula Rt tn where R is an nplaced relationsymbol then
A j Rt tnx xq means Stx xq tnx xq
where S is the nplaced relation IR the interpretation of R in A if is then
A j x xq means not A j x xq
if is then
A j x xq means both A j x xq and A j x xq
if is then
A j x xq means either A j x xq or A j x xq

MODELS TRUTH AND SATISFACTION
if is then
A j x xq means that A j x xq implies A j x xq
if is then
A j x xq means that A j x xq i A j x xq
if is vi thenA j x xq means for every x AA j x xi x xi xq
if is vi thenA j x xq means for some x AA j x xi x xi xq
Exercise Each of the formulas of Example is satised in any model A forany language L by any long enough sequence x x xq of A This is whereyou test your solution to Exercise
We now prove two lemmas which show that the preceeding concepts are welldened In the rst one we see that the value of a term only depends upon thevalues of the variables which actually occur in the term In this lemma the equalsign is used not as a logical symbol in the formal sense but in its usual sense todenote equality of mathematical objects in this case the values of terms whichare elements of the universe of a model
Lemma Let A be a model for L and let tv vp be a term of L Letx xq and y yr be sequences from A such that p q and p r and letxi yi whenever vi actually occurs in tv vp Then
tx xq ty yr
Proof We use induction on the complexity of the term t
If t is vi then xi yi and so we have
tx xq xi yi ty yr since p q and p r
If t is the constant symbol c then
tx xq Ic ty yr
where Ic is the interpretation of c in A If t is F t tm where F is an mplaced function symbol t tm areterms and IF G thentx xq Gtx xq tmx xq andty yr Gty yr tmy yrBy the induction hypothesis we have that tix xq tiy yr for i m since t tm have all their variables among fv vpg Sowe have tx xq ty yr
In the next lemma the equal sign is used in both senses as a formallogical symbol in the formal language L and also to denote the usual equalityof mathematical objects This is common practice where the context allows thereader to distinguish the two usages of the same symbol The lemma conrms thatsatisfaction of a formula depends only upon the values of its free variables

MODELS TRUTH AND SATISFACTION
Lemma Let A be a model for L and a formula of L all of whose free andbound variables occur among v vp Let x xq and y yr q r p betwo sequences such that xi and yi are equal for all i such that vi occurs free in Then
A j x xq i A j y yr
Proof Let A and L be as above We prove the lemma by induction on thecomplexity of
If v vp is the formula t t then we use Lemma to get
A j t tx xq i tx xq tx xq
i ty yr ty yr
i A j t ty yr
If v vp is the formula Rt tn where R is an nplaced relationsymbol with interpretation S then again by Lemma we get
A j Rt tnx xq i Stx xq tnx xq
i Sty yr tny yr
i A j Rt tny yr
If is the inductive hypothesis gives that the lemma is true for SoA j x xq i not A j x xq
i not A j y yr
i A j y yr
If is then using the inductive hypothesis on and we get
A j x xq i both A j x xq and A j x xq
i both A j y yr and A j y yr
i A j y yr
If is then
A j x xq i either A j x xq or A j x xq
i either A j y yr or A j y yr
i A j y yr
If is then
A j x xq i A j x xq implies A j x xq
i A j y yr implies A j y yr
i A j y yr
If is then
A j x xq i we have A j x xq i A j x xq
i we have A j y yr i A j y yr
i A j y yr
If is vi thenA j x xq i for every z AA j x xi z xi xq
i for every z AA j y yi z yi yr
i A j y yr
The inductive hypothesis uses the sequences x xi z xi xq andy yi z yi yr with the formula

MODELS TRUTH AND SATISFACTION
If is vi thenA j x xq i for some z AA j x xi z xi xq
i for some z AA j y yi z yi yr
i A j y yr
The inductive hypothesis uses the sequences x xi z xi xq andy yi z yi yr with the formula
Definition A sentence is a formula with no free variables
If is a sentence we can write A j without any mention of a sequence fromA since by the previous lemma it doesnt matter which sequence from A we useIn this case we say
A satises or A is a model of or holds in A or is true in AIf is a sentence of L we write j to mean that A j for every model A
for L Intuitively then j means that is true under any relevant interpretationmodel for L Alternatively no relevant example model for L is a counterexampleto so is true
Lemma Let v vq be a formula of the language L There is anotherformula v vq of L such that
has exactly the same free and bound occurances of variables as can possibly contain and but no other connective or quantier j v vq
Exercise Prove the above lemma by induction on the complexity of
Definition A formula is said to be in prenex normal form whenever
no variable occuring in occurs both free and bound no bound variable occuring in is bound by more than one quantier and in the written order all of the quantiers preceed all of the connectives
Remark is equivalent to saying that in the constructed order all of theconnective steps preceed all of the quantier steps
Lemma Let v vp be any formula of a language L There is a formula of L which has the following properties
is in prenex normal form and have the same free occurances of variables and j v vp
Exercise Prove this lemma by induction on the complexity of
There is a notion of rank on prenex formulas the number of alternations ofquantiers The usual formulas of elementary mathematics have prenex rank ieno alternations of quantiers For example
xyxy x y

MODELS TRUTH AND SATISFACTION
However the denition of a limit of a function has prenex rank and is muchmore di!cult for students to comprehend at rst sight
x jx aj jF x Lj
A formula of prenex rank would make any mathematician look twice

CHAPTER
Notation and Examples
Although the formal notation for formulas is precise it can become cumbersomeand di!cult to read Condent that the reader would be able if necessary to putformulas into their formal form we will relax our formal behaviour In particularwe will write formulas any way we want using appropriate symbols for variablesconstant symbols function and relation symbols We will omit parentheses or addthem for clarity We will use binary function and relation symbols between thearguments rather than in front as is the usual case for plus times and lessthanWhenever a language L has only nitely many relation function and constant
symbols we often write for example
L fR F c cgomitting explicit mention of the logical symbols including the innitely many variables which are always in L Correspondingly we may denote a model A for Las
A hASG a aiwhere the interpretations of the symbols in the language L are given by I IR S I IF G Ic a and Ic a
Example R hR i and Q hQ i where R is thereals Q the rationals are models for the language L f g Here is abinary relation symbol and are binary function symbols and are constantsymbols whereas are the well known relations arithmetic functionsand constantsSimilarly C hC i where C is the complex numbers is a model for
the language L f g Note the exceptions to the boldface convention forthese popular sets
Example Here L f g where is a binary relation symbol and are binary function symbols and and are constant symbols The followingformulas are sentences
xx x xyx y y x xyzx y y z x z xyx y y x x y xyx y zx z z y xyx y xyy x xyzx y z x y z xx x

NOTATION AND EXAMPLES
xyx y xyx y y x xyzx y z x y z xx x xx yy x xyx y y x xyzx y z x y y z xyzx y x z y z xyzx y z x z y z for each n we have the formulaxx xnyxn yn xn yn x y x xn
where as usual yk abbreviates
kz y y y
The latter formulas express that each polynomial of degree n has aroot The following formulas express the intermediate value property forpolynomials of degree n if the polynomial changes sign from w to z thenit is zero at some y between w and z
for each n we havex xnwzxn wn xn wn x w x
xn zn xn zn x z x
yw y y z z y y w
xn yn xn yn x y x
The most fundamental concept is that of a sentence being true when interpreted in a model A We write this as A j and we extend this concept in thefollowing denitions
Definition If " is a set of sentences A is said to be a model of " writtenA j " whenever A j for each " " is said to be satisable i there is someA such that A j "
Definition A theory T is a set of sentences If T is a theory and is asentence we write T j whenever we have that for all A if A j T then A j We say that is a consequence of T A theory is said to be closed whenever itcontains all of its consequences
Definition If A is a model for the language L the theory of A denotedby ThA is dened to be the set of all sentences of L which are true in A
f of L A j gThis is one way that a theory can arise Another way is through axioms
Definition " T is said to be a set of axioms for T whenever " j forevery in T in this case we write " j T
Remark We will generally assume our theories are closed and we will oftendescribe theories by specifying a set of axioms " The theory will then be allconsequences of "
Example We will consider the following theories and their axioms

NOTATION AND EXAMPLES
The theory of Linear Orderings LOR which has as axioms sentences from Example
The theory of Dense Linear Orders DLO which has as axioms all theaxioms of LOR and sentence and of Example
The theory of Fields FEI which has as axioms sentences from Example
The theory of Ordered Fields ORF which has as axioms all the axioms ofFEI LOR and sentences and from Example
The theory of Algebraically Closed Fields ACF which has as axioms allthe axioms of FEI and all sentences from of Example ie innitelymany sentences one for each n
The theory of Real Closed Ordered Fields RCF which has as axioms allthe axioms of ORF and all sentences from of Example ie innitelymany sentences one for each n
Exercise Show that
Q j DLO R j RCF using the Intermediate Value theorem C j ACF using the Fundamental Theorem of Algebra
where Q R and C are as in Example
Remark The theory of Real Closed Ordered Fields is sometimes axiomatizeddierently All the axioms of ORF are retained but the sentences from ofExample which amount to an Intermediate Value Property are replaced by thesentences from for odd n and the sentence
x x yy x
which states that every positive element has a square root A signicant amount ofalgebra would then be used to verify the Intermediate Value Property from theseaxioms

CHAPTER
Compactness and Elementary Submodels
Theorem The Compactness Theorem MalcevA set of sentences is satisable i every nite subset is satisable
Proof There are several proofs We only point out here that it is an easyconsequence of the following a theorem which appears in all elementary logic texts
Proposition The Completeness Theorem Godel MalcevA set of sentences is consistent i it is satisable
Although we do not here formally dene consistent it does mean what youthink it does In particular a set of sentences is consistent if and only if each nitesubset is consistent
Remark The Compactness Theorem is the only one for which we do not givea complete proof If the reader has not previously seen the Completeness Theoremthere are other proofs of the Compactness Theorem which may be more easilyabsorbed set theoretic using ultraproducts topological using compact spaceshence the name or Boolean algebraic However these topics are too far aeld toenter into the proofs here We will use the Compactness Theorem as a startingpoint in fact all that follows can be seen as its corollaries
Exercise Suppose T is a theory for the language L and is a sentence ofL such that T j Prove that there is some nite T T such that T j Recall that T j i T fg is not satisable
Definition If L and L are two languages such that L L we say thatL is an expansion of L and L is a reduction of L
Definition Given a model A for the language L we can expand it to amodel A of L by giving appropriate interpretations to the symbols in L n L Wesay that A is an expansion of A to L and that A is a reduct of A to L We alsouse the notation AjL for the reduct of A to L
Theorem If a theory T has arbitrarily large nite models then it has aninnite model
Proof Consider new constant symbols ci for i N the usual natural numbers and expand from L the language of T to L L fci i NgLet
" T fci cj i j i j NgWe rst show that every nite subset of " has a model by interpreting the
nitely many relevant constant symbols as dierent elements in an expansion ofsome nite model of T Then we use compactness to get a model A of "

COMPACTNESS AND ELEMENTARY SUBMODELS
The model that we require is for the language L so we take A to be the reductof A to L
Example Number theory is ThhN i the set of all sentences ofL f g which are true in hN i the standard model which weall learned in school
Theorem T SkolemThere exist nonstandard models of number theory
Proof Add a new constant symbol c to L Consider
ThhN i fnz
c n Ngand use the Compactness Theorem The interpretation of the constant symbol cwill not be a natural number
Definition TwomodelsA and A for L are said to be isomorphic wheneverthere is a bijection f A A such that
for each nplaced relation symbol R of L and corresponding interpretationsS of A and S of A we have
Sx xn i Sfx fxn for all x xn in A
for each nplaced function symbol F of L and corresponding interpretationsG of A and G of A we have
fGx xn Gfx fxn for all x xn in A
for each constant symbol c of L and corresponding constant elements a of Aand a of A we have fa a
We write A A This is an equivalence relationDefinition Two models A and A for L are said to be elementarily equiv
alent whenever we have that for each sentence of LA j i A j
We write A A This is another equivalence relationExercise Suppose f A A is an isomorphism and is a formula such
that A j a ak for some a ak from A then A j fa fakUse this to show that A A implies A ADefinition A model A is called a submodel of A i A A and
each nplaced relation S of A is the restriction to A of the correspondingrelation S of A i e S S An
each mplaced function G of A is the restriction to A of the correspondingfunction G of A i e G G Am
each constant of A is the corresponding constant of AWe write A A
Definition Let A and B be two models for L We say A is an elementarysubmodel ofB andB is an elementary extension of A and we write A B whenever A B and

COMPACTNESS AND ELEMENTARY SUBMODELS
for all formulas v vk of L and all a ak AA j a ak i B j a ak
Exercise Prove that if A B then A B and A BExample Let N be the usual natural numbers with as the usual ordering
Let B hNi and A hN n fgi be models for the language with one binaryrelation symbol Then A B and A B in fact A B But we do nothave A B A satises a formula that says is the least element of the orderingbut B does not So we see that being an elementary submodel is a very strongcondition indeed Nevertheless later in the chapter we will obtain many examplesof elementary submodels
Exercise Show that
if A B and B C then A C and if A B and B C then A CDefinition A chain of models for a language L is an increasing sequence
of models
A A An n NThe union of the chain is dened to be the model A fAn n Ng where
the universe of A is A fAn n Ng and each relation S on A is the union of the corresponding relations Sn of An
S fSn n Ng ie the relation extending each Sn each function G on A is the union of the corresponding functions Gn of An
G fGn n Ng ie the function extending each Gn
all the models An and A have the same constant elements
Note that each An AExample For each n N let
An f n n n g Z
Let An hAni Each An A but we dont have A fAn n NgRemark To be sure what is dened here is a chain of models indexed by the
natural numbers N More generally a chain of models could be indexed by anyordinal However we will not need the concept of an ordinal at this point
Definition An elementary chain is a chain of models fAn n Ng suchthat for each m n we have Am An
Theorem Tarskis Elementary Chain TheoremLet fAn n Ng be an elementary chain For all n N we have
An fAn n NgProof Denote the union of the chain by A We have Ak A for each k NClaim If t is a term of the language L and a ap are in Ak then the
value of the term ta ap in A is equal to the value in Ak
Proof of Claim We prove this by induction on the complexity of the term

COMPACTNESS AND ELEMENTARY SUBMODELS
If t is the variable vi then both values are just ai If t is the constant symbol c then the values are equal because c has thesame interpretation in A and in Ak
If t is F t tm where F is a function symbol and t tm are termssuch that each value tia ap is the same in both A and Ak then thevalue
F t tma ap
in A is
Gta ap tma ap
where G is the interpretation of F in A and the value of
F t tma ap
in Ak is
Gkta ap tma ap
where Gk is the interpretation of F in Ak But Gk is the restriction of G toAk so these values are equal
In order to show that eachAk A it will su!ce to prove the following statementfor each formula v vp of L
For all k N and all a ap in Ak
A j a ap i Ak j a ap
Claim The statement is true whenever is t t where t and t are terms
Proof of Claim Fix k N and a ap in Ak
A j t ta ap i ta ap ta ap in A
i ta ap ta ap in Ak
i Ak j t ta ap
Claim The statement is true whenever is Rt tn where R is a relationsymbol and t tn are terms
Proof of Claim Fix k N and a ap inAk Let S be the interpretationof R in A and Sk be the interpretation in Ak Sk is the restriction of S to Ak
A j Rt tna ap i Sta ap tna ap
i Skta ap tna ap
i Ak j Rt tna ap
Claim If the statement is true when is then the statement is true when is
Proof of Claim Fix k N and a ap in Ak
A j a ap i not A j a ap
i not Ak j a ap
i Ak j a ap

COMPACTNESS AND ELEMENTARY SUBMODELS
Claim If the statement is true when is and when is then the statement is true when is
Proof of Claim Fix k N and a ap in Ak
A j a ap i A j a ap and A j a ap
i Ak j a ap and Ak j a ap
i Ak j a ap
Claim If the statement is true when is then the statement is true when is vi
Proof of Claim Fix k N and a ap in Ak Note thatA fAj j Ng
A j via ap i A j via aqwhere q is the maximum of i and p by Lemma
i A j a ai a ai aq for some a A
i A j a ai a ai aq
for some a Al for some l k
i Al j a ai a ai aq
since the statement is true for
i Al j via aq i Ak j via aq since Ak Al
i Ak j via ap by Lemma
By induction on the complexity of we have proven the statement for allformulas which do not contain the connectives and or the quantier To verify the statement for all we use Lemma Let be any formula of L ByLemma there is a formula which does not use nor such that
j v vp
Now x k N and a ap in Ak We have
A j a ap and Ak j a ap
A j a ap i A j a ap
i Ak j a ap
i Ak j a ap
which completes the proof of the theorem
Lemma The TarskiVaught ConditionLet A and B be models for L with A B The following are equivalent
A B

COMPACTNESS AND ELEMENTARY SUBMODELS
for any formula v vq and any i q and any a aq from Aif there is some b B such that
B j a ai b ai aq
then we have some a A such that
B j a ai a ai aq
Proof Only the implication requires a lot of proof We will provethat for each formula v vp and all a ap from A we will have
A j a ap i B j a ap
by induction on the complexity of using only the negation symbol the connective and the quantier recall Lemma The cases of formulas of the form t t and Rt tn come immediatelyfrom the fact that A B
For negation suppose is and we have it for thenA j a ap i not A j a ap
i not B j a ap i B j a ap
The case proceeds similarly For the case we consider as vi If A j via ap then theinductive hypothesis for and the fact that A B ensure thatB j via ap It remains to show that if B j a ap thenA j a apAssume B j via ap By Lemma B j via aq
where q is the maximum of i and p By the denition of satisfaction thereis some b B such that
B j a ai b ai aq
By there is some a A such thatB j a ai a ai aq
By the inductive hypothesis on for that same a AA j a ai a ai aq
By the denition of satisfaction
A j via aq Finally by Lemma A j a ap
Recall that jBj is used to represent the cardinality or size of the set B Notethat since any language L contains innitely many variables jLj is always innitebut may be countable or uncountable depending on the number of other symbolsWe often denote an arbitrary innite cardinal by the lower case Greek letter
Theorem Downward LowenheimSkolem TheoremLet B be a model for L and let be any cardinal such that jLj jBj Then Bhas an elementary submodel A of cardinality
Furthermore if X B and jX j then we can also have X A

COMPACTNESS AND ELEMENTARY SUBMODELS
Proof Without loss of generosity assume jX j We recursively dene setsXn for n N such that X X X Xn and such that for eachformula v vp of L and each i p and each a ap from Xn such that
B j via apwe have x Xn such that
B j a ai x ai ap
Since jLj and each formula of L is a nite string of symbols from L there areat most many formulas of L So there are at most elements of B that needto be added to each Xn and so without loss of generosity each jXnj LetA fXn n Ng then jAj Since A is closed under functions from B andcontains all constants from B A gives rise to a submodel A BThe TarskiVaught Condition is used to show that A B
Theorem The Upward LowenheimSkolem TheoremLet A be an innite model for L and be any cardinal such that jLj andjAj Then A has an elementary extension of cardinality
Proof For each a A let ca be a new constant symbol letL L fca a Ag
Note that sentences of L are just formulas of L with all free variables replacedby constant symbolsIn addition add many new constant symbols to L to make L Dene " to
be the following set of sentences of Lfd d d and d are distinct new constant symbols of L n Lg f is a sentence of L obtained from the formula v vp of Lby replacing each free variable vi by the constant symbol caiand A j a apg
By interpreting ca as a and the ds as distinct elements of A we can transformA into a model of any nite subset of " Using the Compactness Theorem weobtain a model D for L such that D j "Note that D has size at least and that for any sentence of L D j i
"Obtain a model C for L from D by simply switching elements of the universe
of D with A to ensure that for each a A the interpretation of ca in C is aHence the universe of C contains A and C j " Let C be the reduct of C
to L The following argument will show that A CLet be any formula of L and a ap any elements from A Let be the
sentence of L formed by replacing free occurances of vi with cai We haveA j a ap i "
i D j
i C j
i C j a ap
However C may have size strictly larger than In this case we obtain ournal B by using the previous theorem to get B C with A B It is nowstraightforward to conclude that A B

COMPACTNESS AND ELEMENTARY SUBMODELS
Definition A theory T for a language L is said to be complete wheneverfor each sentence of L either T j or T j
Lemma A theory T for L is complete i any two models of T are elementarily equivalent
Proof easy easyDefinition A theory T is said to be categorical in cardinality whenever
any two models of T of cardinality are isomorphic We also say that T is categorical
The most interesting cardinalities in the context of categorical theories are the cardinality of countably innite sets and the rst uncountable cardinal
Exercise Show that DLO is categorical There are two wellknownproofs One uses a backandforth construction of an isomorphism The otherconstructs by recursion an isomorphism from the set of dyadic rational numbersbetween and
f n
m m is a positive integer and n is an integer n mg
onto a countable dense linear order without endpointsNow use the following theorem to show that DLO is complete
Theorem The Lo sVaught TestSuppose that a theory T has only innite models for a language L and that T iscategorical for some cardinal jLj Then T is complete
Proof We will show that any two models of T are elementarily equivalentLet A of cardinality and B of cardinality be two models of T If use the Upward LowenheimSkolem Theorem to get A such that
jAj and A AIf use the Downward LowenheimSkolem Theorem to get A such that
jAj and A AEither way we can get A such that jAj and A A Similarly we can
get B such that jBj and B B Since T is categorical A B HenceA BRecall that the characteristic of a eld is the prime number p such that
pz
provided that such a p exists and if no such p exists the eld has characteristic All of our bestloved elds Q R and C have characteristic On the other handelds of characteristic p include the nite eld of size p the prime Galois eld
Theorem The theory of algebraically closed elds of characteristic is complete
Proof We use the LosVaught Test and the following Lemma
Lemma Any two algebraically closed elds of characteristic and cardinality are isomorphic

COMPACTNESS AND ELEMENTARY SUBMODELS
Proof Let A be such a eld containing the rationals Q hQ i as aprime subeld In a manner completely analogous to nding a basis for a vectorspace we can nd a transcendence basis for A that is an indexed subsetfa Ig A such that A is the algebraic closure of the subeld A generatedby fa Ig but no a is in the algebraic closure of the subeld generated bythe rest fa I and gSince the subeld generated by a countable subset would be countable and the
algebraic closure of a countable subeld would also be countable we must havethat the transcendence base is uncountable Since jAj the least uncountablecardinal we must have in fact that jI j Now let B be any other algebraically closed eld of characteristic and size
As above obtain a transcendence basis fb Jg with jJ j and itsgenerated subeld B Since jI j jJ j there is a bijection g I J which we canuse to build an isomorphism from A to BSince B has characteristic a standard theorem of algebra gives that the
rationals are isomorphically embedded into B Let this embedding be
f Q B
We extend f as follows for each I let fa bg which maps the transcendence basis of A into the transcendence basis of BWe now extend f to map A onto B as follows Each element of A is given by
pa am
qa am
where p and q are polynomials with rational coe!cients and the as come of coursefrom the transcendence basisLet f map such an element to
#pbg bgm
#qbg bgm
where #p and #q are polynomials whose coe!cients are the images under f of therational coe!cients of p and qThe nal extension of f to all of A andB comes from the uniqueness of algebraic
closures
Remark Lemma is also true when is replaced by any xed characteristicand by any uncountable cardinal
Theorem Let H be a set of sentences in the language of eld theory whichare true in algebraically closed elds of arbitrarily high characteristic Then H holdsin some algebraically closed eld of characteristic
Proof A eld is a model in the language f g of the axioms of eldtheory Let ACF be the set of axioms for the theory of algebraically closed eldssee Example For each n let n denote the sentence
nz
Let " ACF H fn n gLet " be any nite subset of " and let m be the largest natural number such
that m " or let m by default

COMPACTNESS AND ELEMENTARY SUBMODELS
Let A be an algebraically closed eld of characteristic p m such that A j Hthen in fact A j "So by compactness there is B such that B j " B is the required eld
Corollary Let C denote as usual the complex numbers Every onetoone polynomial map f Cm Cm is onto
Proof A polynomial map is a function of the form
fx xm hpx xm pmx xmiwhere each pi is a polynomial in the variables x xmWe call max f degree of pi i mg the degree of f Let L be the language of eld theory and let mn be the sentence of L which
expresses that each polynomial map of m variables of degree n which is onetoone is also ontoWe wish to show that there are algebraically closed elds of arbitrarily high
characteristic which satisfy H fmn mn Ng We will then apply Theorem Theorem Lemma and Exercise and be nishedLet p be any prime and let Fp be the prime Galois eld of size p The algebraic
closure $Fp is the countable union of a chain of nite elds
Fp A A A Ak Ak obtained by recursively adding roots of polynomialsWe nish the proof by showing that each h $Fp i satises HGiven any polynomial map f $Fp
m $Fpm which is onetoone we show
that f is also onto Given any elements b bm $Fp there is some Ak containingb bm as well as all the coe!cients of fSince f is onetoone f Am
k Amk Am
k is a onetoone polynomial mapHence since Am
k is nite f Amk is onto and so there are a am Ak such
that fa am hb bmi Therefore f is ontoThus for each prime number p and each mn N mn holds in a eld of
characteristic p ie h $Fp i satises H
It is a signicant problem to replace onetoone with locally onetoone

CHAPTER
Diagrams and Embeddings
Let A hA Ii be a model for a language L and X A Expand L toLX Lfca a Xg by adding new constant symbols to L We can expand A toa model AX hA I i for LX by choosing I extending I such that I ca a foreach a X We sometimes write this as hA cxixX We often deal with the caseX A to obtain AA
Exercise Let A and B be models for L with X A B Prove
i if A B then AX BX ii if A B then AX
BX iii if A B then AX BX
Hint A j a ap i AA j where is the sentence of LA formed byreplacing each free occurance of vi with cai
Definition Let A be a model for L The elementary diagram of A is ThAA the set of all sentences of LA whichhold in AA
The diagram of A denoted by A is the set of all those sentences in ThAAwithout quantiers
Remark There is a notion of atomic formula which is a formula of the formt t or Rt tn where t tn are terms SometimesA is dened to be theset of all atomic formulas and negations of atomic formulas which occur in ThAAHowever this is not substantially dierent from Denition since the reader canquickly show that for any model B B j A in one sense i B j A in the othersense
Definition A is said to be isomorphically embedded in B whenever
there is a model C and an isomorphism f such that
f A C and C Bor
there is a model D and an isomorphism g such that
A D and g D B
Exercise Prove that in fact and are equivalent conditions
Definition A is said to be elementarily embedded in B whenever
there is a model C and an isomorphism f such that
f A C and C B

DIAGRAMS AND EMBEDDINGS
there is a model D and an isomorphism g such that
A D and g D B
Exercise Again prove that in fact and are equivalent
Theorem The diagram lemmas Let A and B be models for L A is isomorphically embedded in B i B can be expanded to a model of A A is elementarily embedded in B iB can be expanded to a model of ThAA
Proof We sketch the proof of If f is as in of Denition above then hB faiaA j A If hB baiaA j A then let fa ba
Exercise Give a careful proof of part of the theorem
We now apply these notions to graph theory and to calculus The naturallanguage for graph theory has one binary relation symbol which we call E tosuggest the word edge and the following two axioms
xyEx y Ey x xEx xA graph is of course a model of graph theory
Corollary Every planar graph can be four coloured
Proof We will have to use the famous result of Appel and Haken that everynite planar graph can be four coloured Model Theory will take us from thenite to the innite We recall that a planar graph is one that can be embeddedor drawn in the usual Euclidean plane and to be four coloured means that eachvertex of the graph can be assigned one of four colours in such a way that no edgehas the same colour for both endpointsLet A be an innite planar graph Introduce four new unary relation symbols
RGB Y for red green blue and yellow We wish to prove that there is someexpansion A of A such that A j where is the sentence in the expandedlanguage
xRx Gx Bx Y x
xRx Gx Bx Y x
xyRx Ry Ex y which will ensure that the interpretations of RGB and Y will four colour thegraphLet " A fg Any nite subset of " has a model based upon the
appropriate nite subset of A By the compactness theorem we get B j " SinceB j the interpretations of RGB and Y four colour it By the diagram lemmaA is isomorphically embedded in the reduct of B and this isomorphism deliversthe fourcolouring of A
A graph with the property that every pair of vertices is connected with an edgeis called complete At the other extreme a graph with no edges is called discreteA very important theorem in nite combinatorics says that most graphs contain an

DIAGRAMS AND EMBEDDINGS
example of one or the other as a subgraph A subgraph of a graph is of course asubmodel of a model of graph theory
Corollary Ramseys TheoremFor each n N there is an r N such that if G is any graph with r vertices theneither G contains a complete subgraph with n vertices or a discrete subgraph withn vertices
Proof We follow F Ramsey who began by proving an innite version of thetheorem also called Ramseys Theorem
Claim Each innite graph G contains either an innite complete subgraph oran innite discrete subgraph
Proof of Claim By force of logical necessity there are two possiblities
there is an innite X G such that for all x X there is a nite Fx Xsuch that Ex y for all y X n Fx
for all innite X G there is a x X and an innite Y X such thatEx y for all y Y
If occurs we recursively pick x X x XnFx x XnFxFx etcto obtain an innite complete subgraph If occurs we pick x G and Y G
with the property and then recursively choose x Y and Y Y x Y andY Y and so on to obtain an innite discrete subgraph
We now use Model Theory to go from the innite to the nite Let bethe sentence of the language of graph theory asserting that there is no completesubgraph of size n
x xnEx x Ex x Exn xnLet be the sentence asserting that there is no discrete subgraph of size n
x xnEx x Ex x Exn xn
Let T be the set consisting of and the axioms of graph theoryIf there is no r as Ramseys Theorem states then T has arbitrarily large nite
models By Theorem T has an innite model contradicting the claim
The following theorem of A Robinson nally solved the centuries old problemof innitesimals in the foundations of calculus
Theorem The Leibniz PrincipleThere is an ordered eld R called the hyperreals containing the reals R and aninnitesimal number such that any statement about the reals which holds in R alsoholds in R
Proof Let R be hR i We will make the statement of the theoremprecise by proving that there is some model B in the same language L as R andwith the universe called R such that R B and there is b R such that b a for each positive a R

DIAGRAMS AND EMBEDDINGS
For each real number a we introduce a new constant symbol ca and in additionanother new constant symbol d Let " be the set of sentences in the expandedlanguage given by
ThRR f d ca a is a positive real gWe can obtain a model C j " by the compactness theorem Let C be the reductof C to L By the elementary diagram lemma R is elementarily embedded in Cand so there is a model B for L such that C B and R B
Remark This idea is extremely useful in understanding calculus An elementx R is said to be innitesimal whenever r x r for each positive r R is innitesimal Two elements x y R are said to be innitely close writtenx y whenever x y is innitesimal Note x is innitesimal i x An elementx R is said to be nite whenever r x r for some positive r R Else it isinniteEach nite x R is innitely close to some real number called the standard
part of x written stxTo dierentiate f for each Mx R generate My fx Mx fx Then
f x stMyMx
whenever this exists and is the same for each innitesimal Mx
The increment lemma states that if y fx is dierentiable at x and M x then My f x Mx Mx for some innitesimal Proofs of the usual theorems of calculus are now easier
The following theorem is considered one of the most fundamental results ofmathematical logic We give a detailed proof
Theorem Robinson Consistency TheoremLet L and L be two languages with L LL Suppose T and T are satisabletheories in L and L respectively Then TT is satisable i there is no sentence of L such that T j and T j
Proof The direction is easy and motivates the whole theoremWe begin the proof in the direction Our goal is to show that T T is
satisable The following claim is a rst step
Claim T f sentences of L T j g is satisable
Proof of Claim Using the compactness theorem and considering conjunctions it su!ces to show that if T j and T j with a sentence of L thenf g is satisable But this is true since otherwise we would have j andhence T j and so would be a sentence of L contradicting our hypothesis
The basic idea of the proof from now on is as follows In order to construct amodel of T T we construct models A j T and B j T and an isomorphismf AjL BjL between the reducts of A and B to the language L witnessingthat AjL BjL We then use f to carry over interpretations of symbols in L n Lfrom A to B giving an expansion B of B to the language L L Then sinceBjL A and BjL B we get B j T TThe remainder of the proof will be devoted to constructing such an A B and
f A and B will be constructed as unions of elementary chains of Ans and Bnswhile f will be the union of fn An Bn

DIAGRAMS AND EMBEDDINGS
We begin with n the rst link in the elementary chain
Claim There are models A j T and B j T with an elementary embeddingf AjL BjL
Proof of Claim Using the previous claim let
A j T f sentences of L T j gWe rst wish to show that ThAjLA
T is satisable Using the compactnesstheorem it su!ces to prove that if ThAjLA
then T fg is satisableFor such a let ca can be all the constant symbols from LA
nL which appearin Let be the formula of L obtained by replacing each constant symbol cai bya new variable ui We have
AjL j a an
and so AjL j u unBy the denition of A it cannot happen that T j u un and so
there is some model D for L such that D j T and D j u un So thereare elements d dn of D such that D j do dn Expand D to a modelD for L LA
making sure to interpret each cai as di Then D j and so
D j T fgLetB
j ThAjLAT LetB be the reduct ofB
to L clearlyB j TSince BjL can be expanded to a model of ThAjLA
the Elementary DiagramLemma gives an elementary embedding
f AjL BjLand nishes the proof of the claim
The other links in the elementary chain are provided by the following result
Claim For each n there are models An j T and Bn j T with anelementary embedding
fn AnjL BnjLsuch that
An An Bn Bn fn extends fn and Bn range of fn
A A An An f f fn fnB B Bn Bn
The proof of this claim will be discussed shortly Assuming the claim letA
SnNAn B
SnNBn and f
SnN fn The Elementary Chain Theorem
gives that A j T and B j T The proof of the theorem is concluded by simplyverifying that f AjL BjL is an isomorphismThe proof of the claim is long and quite technical it would not be inappropriate
to omit it on a rst reading The proof of course must proceed by induction on

DIAGRAMS AND EMBEDDINGS
n The case of a general n is no dierent from the case n which we state andprove in some detail
Claim There are models A j T and B j T with an elementary embeddingf AjL BjL such that A A B B f extends f andB range of f
A Af fB B
Proof of Claim Let A be the expansion of A to the language L L fca a Ag formed by interpreting each ca as a A A
is just another notation
for AA The elementary diagram of A is Th
AA
Let B
be the expansion
of BjL to the languageL L fca a Ag fcb b Bg
formed by interpreting each ca as fa B and each cb as b B
We wish to prove that ThAA
ThB
is satisable By the compactness
theorem it su!ces to prove that ThAA
fg is satisable for each in ThB
For such a sentence let ca cam cb cbn be all those constant symbolsoccuring in but not in L Let u um w wm be the formula of Lobtained from by replacing each constant symbol cai by a new variable ui andeach constant symbol cbi by a new variable wi We have B
j so
BjL j fa fam b bn
So BjL j w wnfa fam
Since f is an elementary embedding we have
AjL j w wna am
Let %w wn be the formula of L obtained by replacing occurances of uiin u um w wn by cai then A
j w wn % So of course
AA
j w wn %
and this means that there are d dn in A A such that
A A
j %d dnWe can now expand
AA
to a model D by interpreting each cbi as di to obtain
D j and so ThAA
fg is satisableLet E j Th A A
ThB
By the elementary diagram lemma A is ele
mentarily embedded into EjL So there is a model A for L with A A andan isomorphism g A EjL Using g we expand A to a model A isomorphicto E Let A denote A
jL we have A j ThB
We now wish to prove that Th AA
Th B
B
is satisable where B is
the common expansion of B and B
to the language
L L fca a Ag fcb b Bg

DIAGRAMS AND EMBEDDINGS
By the compactness theorem it su!ces to show that
ThB
B
fgis satisable for each in Th AA
Let cx cxn be all those constant symbols
which occur in but are not in L Let u un be the formula of L obtainedfrom by replacing each cxi with a new variable ui Since A
A
j we have
A j x xn
and so
A j u unAlso A j ThB
and ThB
is a complete theory in the language L henceu un is in ThB
Thus
B
j u unand so
B
B
j u un
and therefore there are b bn in B B such that
B
B
j b bn
We can now expandB
B
to a model F by interpreting each cxi as bi then
F j and ThB
B
fg is satisableLet G j Th AA
Th B
B
By the elementary diagram lemma B is
elementarily embedded into GjL So there is a model B for L with B
B
and an isomorphism h B GjL Using h we expand B
to a model B
isomorphic to G Let B
denote B
jL Again by the elementary diagram lemmaA is elementarily embedded into B
Let this be denoted by
f A
B
Let a A we will show that fa fa By denition we haveB
j v cafa and so B j v cafa Since B
B
B j v cafa and so B
j v cafa Now A j ca va
and A A so A j ca va so A
j ca va Since f is elementaryB
j ca vfa so B
j v vfa fa and so fa faThus f extends fLet b B we will prove that b fa for some a A By denition we
have B
j v cbb so B j v cbb Since B
B
B j v cbb
so B
j v cbb On the other hand since vv cb is always satisedwe have A j vv cb so there is a A such that A
j v cba Sincef is elementary B
j v cbfa so B
j v vb fa so b faThus B range of fWe now let A be A
jL and let B be B
jL We get A A and B B
and f AjL BjL remains an elementary embeddingThis completes the proof of the claim
Exercise The Robinson Consistency Theorem was originally stated as

DIAGRAMS AND EMBEDDINGS
Let T and T be satisable theories in languages L and L respectively and let T TT be a complete theory in the languageL L Then T T is satisable in the language L L
Show that this is essentially equivalent to our version in Theorem by rstproving that this statement follows from Theorem and then also proving thatthis statement implies Theorem Of course for this latter argument you arelooking for a proof much shorter than our proof of Theorem however it will helpto use the rst claim of our proof in your own proof
Theorem Craig Interpolation TheoremLet and be sentences such that j Then there exists a sentence calledthe interpolant such that j and j and every relation function or constantsymbol occuring in also occurs in both and
Exercise Show that the Craig Interpolation Theorem follows quickly fromthe Robinson Consistency Theorem Also use the Compactness Theorem to showthat Theorem follows quickly from Theorem

CHAPTER
Model Completeness
The quantier is sometimes said to be the universal quantier and the quantier to be the existential quantierA formula is said to be quantier free whenever no quantiers occur in A formula is said to be universal whenever it is of the form x xk
where is quantier freeA formula is said to be existential whenever it is of the form x xk
where is quantier freeA formula is said to be universalexistensial whenever it is of the form
x xky yk where is quantier freeWe extend these notions to theories T whenever each axiom of T has the
property
Remark Note that each quantier free formula is trivially equialent to theexistential formula vi where vi does not occur in
Exercise Let A and B be models for L with A B Verify the followingfour statements
i A B i BA j ThAA i AA j ThBAii A B i BA j A i BA j for each quantier free of ThAAiii A B i BA j for each existential of ThAAiv A B i AA j for each universal of ThBA
Definition A model A of a theory T is said to be existentially closed ifwhenever A B and B j T we have AA j for each existential of ThBA
Remark If A is existentially closed and A A then A is also existentiallyclosed
Definition A theory T is said to be model complete whenever T Ais complete in the language LA for each model A of T
Theorem A Robinson Let T be a theory in the language L The following are equivalent
T is model complete T is existentially complete ie each model of T is existentially closed for each formula v vp of L there is a universal formula v vp
such that T j v vp for all models A and B of T A B implies A B
Proof Let A j T and B j T with A B Clearly AA j A it is also easy to see thatBA j A Now by T A is complete and both AA and BA are models ofthis theory so they are elementarily equivalent

MODEL COMPLETENESS
So let be any sentence of LA existential or otherwise If BA j thenAA j and follows
Lemma shows that it su!ces to prove it for formulas in prenex normal formWe do this by induction on the prenex rank of which is the number of alternationsof quantiers in The rst step is prenex rank Where only universal quantiersare present the result is trivial The existential formula case is nontrivial it is thefollowing claim
Claim For each existential formula v vp of L there is a universalformula v vp such that
T j v vp
Proof of Claim Add new constant symbols c cp to L to formL L fc cpg
and to form a sentence of L obtained by replacing each instance of vi in withthe corresponding ci
is an existential sentence It su!ces to prove that there isa universal sentence of L such that T j
Let & funiversal sentences of L such that T j gWe hope to prove that there is some & such that T j Note howeverthat any nite conjunction n of sentences from & is equivalent toa sentence in & which is simply obtained from n by moving allthe quantiers to the front Thus it su!ces to prove that there are nitely manysentences n from & such that
T j n
If no such nite set of sentences existed then each
T f ng fgwould be satisable By the compactness theorem T & fg would be satisable Therefore it just su!ces to prove that T & j
In order to prove that T & j let A be any model of T & Form LA asusual but ensure that fc cpg fca a Ag so that L LA Let
" T fg AWe wish to show that " is satisable By the compactness theorem it su!ces toconsider T f g where is a conjunction of nitely many sentences of ALet be the formula obtained from by exchanging each constant symbol fromLA n L occuring in for a new variable ua So
A j ua uamua uamBut then A is not a model of the universal sentence ua uamua uamRecalling that A j & we are forced to conclude that this universal sentence is notin & and so not a consequence of T fg So
T fg fua uamua uamgmust be satisable and any model of this can be expanded to a model of T f gThus " is satisable for the language LA

MODEL COMPLETENESS
Let C j " By the diagram lemma there is a modelB for L such that AjL Band B CjL Thus both AjL and B are models of T Furthermore BA C sothat BA j We now use to get that AjLA j But AjLA is just AAand so A j This means T & j and nishes the proof of the claim
We will now do the general cases for the proof of the induction on prenex rankThere are two cases corresponding to the two methods available for increasing thenumber of alternations of quantiers
a the addition of universal quantiersb the addition of existential quantiers
For the case a suppose v vp is w wmv vp w wmand has prenex rank lower than so that we have by the inductive hypothesisthat there is a quantier free formula v vp w wm x xn with newvariables x xn such that
T j v vpw wm x xnTherefore case a is concluded by noticing that this gives us
T j v vpw wm w wmx xnExercise Check this step using the denition of satisfaction
For case b suppose v vp is w wnv vp w wm and has prenex rank less than Here we will use the inductive hypothesis on which of course also has prenex rank less than We obtain a quantier free formulav vp w wm x xn with new variables x xn such that
T j v vpw wm x xnSo T j v vpw wm w wmx xnAnd T j v vpw wm w wmx xn
Now w wmx xn is an existential formula so by the claim there is auniversal formula such that
T j v vpw wmx xn
Hence T j v vpw wn
which is the nal result which we needed
Let A j T and B j T with A B Let be a formula of L and let a ap bein A such that
B j a ap
Obtain a universal formula such that
T j v vp
so
B j a ap
Since A BA j a ap

MODEL COMPLETENESS
and so A j a ap and A B
Let A j T We will show that T A is complete by showing that for any modelB for LA B j T A implies B j ThAALetting B be such a model we note that BjL the restriction of B to L can
be expanded to B a model of A So by the diagram lemma A is isomorphicallyembedded in BjL Furthermore by checking the proof of the diagram lemma wecan ensure that there is an
f A BjLsuch that for each a A fa is the interpretation of ca in B Recall thatLA L fca a Ag Moreover as in Exercise there is a model D for Lsuch that A D and an isomorphism g D BjL with the property that for eacha A ga is the interpretation of ca in BNow let ThAA so that AA j Let u uk be the formula of L
obtained by replacing each occurance of cai in by the new variable ui We have
A j a ak
Since A D we can use to get A D and so we have D j a akWith the isomorphism g we get that
BjL j ga gak
and since gai is the interpretation of cai in B we haveB j ThusB j ThAAand this proves
Example We will see later that the theory ACF is model complete ButACF is not complete because the characteristic of the algebraically closed feild canvary among models of ACF and the assertion that I have characteristic p caneasily be expressed as a sentence of the language of ACF
Exercise Suppose that T is a model complete theory in L and that either any two models of T are isomorphically embedded into a third or there is a model of T which is isomorphically embedded in any other
Then prove that T is completeExample Let N be the usual natural numbers and the usual ordering
Let B hN i and A hN n fg i be models for the language with one binaryrelation symbol ThA is of course complete but it is not model completebecause it is not existentially complete In fact the model A is not existentiallyclosed because B j ThA and A B and BA j vv c where c is theconstant symbol with interpretation But AA does not satisfy this existentialsentence
Theorem Lindstroms TestLet T be a theory in a countable language L such that
all models of T are innite the union of any chain of models of T is a model of T and T is categorical for some innite cardinal
Then T is model complete

MODEL COMPLETENESS
Proof WLOG we assume that T is satisable We use conditions and to prove the following
Claim T has existentially closed models of each innite size
Proof of Claim By the LowenheimSkolem Theorems we get A j T withjAj We recursively construct a chain of models of T of size
A A An An with the property that
if B j T and An B and is an existential sentence of ThBAn then
AnAnj
Suppose An is already constructed we will construct An Let "n be a maximally large set of existential sentences of LAn
such that for each nite " "nthere is a model C for LAn
such that
C j " T AnBy compactness T "n An has a model D and without loss of generosity
An D By the Downward LowenheimSkolem Theorem we get E such thatAn E jEj and E DLet An EjL we will show that An has the required properties Since
E D E j T An and so A An See Exercise Let B j T with An B and be an existential sentence of ThBAn
wewill show that AnAn
j Since "n consists of existential sentences and D E AnAn
BAnwe have see Exercise that BAn j "n The maximal
property of "n then forces to be in "n because if "n then there must be somenite " "n for which there is no C such that C j " fgT An but BAn
is such a C' Now since "n and E D j "n we must have E AnAnj
Now let A be the union of the chain By hypothesis A j T It is easy to checkthat jAj To check that A is existentially closed let B j T with A B andlet be an existential sentence of ThBA Since can involve only nitely manyconstant symbols is a sentence of LAn
for some n N Thus An A B
gives that AnAnj Since is existential see Exercise again we get that
A j This completes the proof of the claim
We now claim that T is model complete using Theorem by showing thatevery model A of T is existentially closed There are three cases to consider jAj jAj jAj
where T is categoricalCase Let A be an existentially closed model of T of size Then there
is an isomorphism f A A Hence A is existentially closed
Case Let be an existential sentence of LA and B j T such that A Band BA j Let X fa A ca occurs in g By the Downward LowenheimSkolem Theorem we can nd A such that A A X A and jAj Now byCase A is existentially closed and we have A B and in LA so A
A j But since ThA
A and A A we have AA j

MODEL COMPLETENESS
Case Let and B be as in case By the Upward LowenheimSkolemTheorem we can nd A such that A A and jAj By case A is existentially closed
Claim There is a model B such that A B and BA B
A
Assuming this claim we have B j T and B
Aj and by the fact that A is
existentially closed we have AA j Since A A we have AA j
The following lemma implies the claim and completes the proof of the theorem
Lemma Let A B and A be models for L such that A B and A AThen there is a model B for L such that A B and BA B
A
Proof Let A B A and L be as above Note that since A B we haveBA j A and so AA BALet be a sentence from A Let fdj j mg be the constant symbols
from LA n LA appearing in Obtain a quantier free formula u um ofLA by exchanging each dj in with a new variable ui Since A
A j we haveAAj u um Since A A we have AA A
Aand so AA j u um
Since AA BA BA j u um Hence for some b bm in B BA jb bm Expand BA to be a model B
Afor the w language LAfdj j
mg by interpreting each dj as bj Then B
Aj and so ThBAfg is satisable
This shows that ThBA " is satisable for each nite subset " A Bythe Compactness Theorem there is a model C jA ThBA Using the DiagramLemma for the language LA we obtain a model B for L such that A
A B
Aand
B
A CjLA Hence B
Aj ThBA and so B
A BA
Exercise Suppose A A are models for L Prove that for each sentence of LA if A j then A j
Exercise Prove that if T has a universalexistential set of axioms thenthe union of a chain of models of T is also a model of T
Remark The converse of this last exercise is also true it is called the ChangLos Suszko Theorem
Theorem The following theories are model complete
dense linear orders without endpoints DLO algebraically closed elds ACF
Proof DLO This theory has a universal existential set of axioms so that itis closed under unions of chains It is categorical by Exercise so Lindstromstest appliesACF We rst prove that for any xed characteristic p the theory of alge
braically closed elds of characteristic p is model complete The proof is similar tothat for DLO with categoricity Lemma Let A B be algebraically closed elds They must have the same character
istic p Therefore A B
Corollary Any true statement about the rationals involving only the usualordering is also true about the reals

MODEL COMPLETENESS
Proof Let A hQi and B hRi where and are the usualorderings The precise version of this corollary is A B This follows fromTheorem and Theorem and the easy facts that A j DLO B j DLO andA B The reader will appreciate the power of these theorems by trying to proveA B directly without using them
Corollary Hilberts NullstellensatzLet " be a nite system of polynomial equations and inequations in several
variables with coecients in the eld A If " has a solution in some eld extendingA then " has a solution in the algebraic closure of A
Proof Let be the existential sentence of the language LA which assertsthe fact that there is a solution of " Suppose " has a solution in a eld B withA B Then BA j So B
Aj where B is the algebraic closure of B Let A
be the algebraic closure of A Since A B we have A BBy Theorem ACF is model complete so A B Hence A
A B
Aand
AAj

CHAPTER
The Seventeenth Problem
We will give a complete proof later that RCF the theory of real closed orderedelds is model complete However by assuming this result now we can give asolution to the seventeenth problem of the list of twentythree problems of DavidHilberts famous address to the International Congress of Mathematicians inParis
Corollary E ArtinLet qx xn be a rational function with real coecients which is positive definite ie
qa an for all a an RThen there are nitely many rational functions with real coecients
fx xn fmx xn such that
qx xn
mXj
fjx xn
We give a proof of this theorem after a sequence of lemmas The rst lemmajust uses calculus to prove the special case of the theorem in which q is a polynomialin only one variable This result probably motivated the original question
Lemma A positive denite real polynomial is the sum of squares of real polynomials
Proof We prove this by induction on the degree of the polynomial Letpx Rx with degree degp and px for all real x Let pa minfpx x Rg so
px x aqx pa and pa
for some polynomial q But
pa x aqx qxxa qa
so qa and qx rxx a for some polynomial rx So
px pa x arx
For all real x we have
x arx px pa Since r is continuous rx for all real x and degr degp So byinduction rx
Pni rix
where each rix Rx
So px pa
nXi
x a rix

THE SEVENTEENTH PROBLEM
ie px hp
pai
nXi
x arix
The following lemma shows why we deal with sums of rational functions ratherthan sums of polynomials
Lemma xy xy xy is positive denite but not the sum ofsquares of polynomials
Proof Let the polynomial be px y A little calculus shows that the minimum value of p is and conrms that p is positive deniteSuppose
px y
lXi
qix y
where qix y are polynomials each of which is the sum of terms of the form axmynFirst consider powers of x and the largest exponent m which can occur in any ofthe qi Since no term of p contains x
or higher powers of x we see that we musthave m Considering powers of y similarly gives that each n So eachqix y is of the form
aixy bix
y cixy dix
eiy fixy gix hiy ki
for some coe!cients ai bi ci di ei fi gi hi and ki Comparing coe!cients of xy
in p and the sum of the qi gives
lX
i
ai
so each ai Comparing the coe!cients of x and y gives that each di ei
Now comparing the coe!cients of x and y gives that each gi hi Nowcomparing the coe!cients of xy gives
lX
i
fi
which is impossible
The next lemma is easy but useful
Lemma The reciprocal of a sum of squares is a sum of squares
Proof For example
A B
A B
A B
A
A B
B
A B
The following lemma is an algebraic result of E Artin and O Schreier whoinvented the theory of real closed elds

THE SEVENTEENTH PROBLEM
Lemma Let A hA Ai be an ordered eld such that each positive element of A is the sum of squares of elements of A Let B be a eld containingthe reduct of A to f g as a subeld and such that zero is not the sum of nonzero squares in B
Let b B nA be such that b is not the sum of squares of elements of B Thenthere is an ordering B extending A on B such that b B
Proof It su!ces to nd a set P B of positive elements of B such that
b P P c P for each c B P is closed under and for any c B n fg either c P or c P
Once P has been obtained we dene B as follows
c B c i c c P
For each a A if A a then a is a sum of squares and so by and a P Thus B extends ASo that all that remains to do is to construct such a P The rst approximation
to P is P
Let P
lXi
ci mXj
dj b lm N ci B dj B not all zero
We claim that and hold for P and are obvious In
order to verify note that ifPm
j dj b
Pli c
i then by the previous lemma
about reciprocals of sums of squares b would be a sum of squares Now holdsby denition of P noting that c
i djb cidjb and
djb dkb djdkbWe now construct larger and larger versions of P to take care of requirement
We do this in the following way Suppose P P P satises and and c P We dene P to be
fp c p is a polynomial with coe!cients in PgIt is easy to see that c P P P and that and hold for PTo show that holds for P we suppose that p c and bring forth a
contradiction Considering even and odd exponents we obtain
px qx xrx
for some polynomials q and r with coe!cients in P If rc then qc
But qc is in P which is a contradiction On the other hand if rc then
p c qc crc
which means that
c qc rc
rc
and since each of the factors on the right hand side is in P we get a contradiction
Now we need

THE SEVENTEENTH PROBLEM
Lemma Every ordered eld can be embedded as a submodel of a real closedordered eld
Proof It su!ces to prove that for every ordered eld A there is an orderedeld B such that A B and for each natural number n B j n where n isthe sentence in the language of eld theory which formally states
If p is a polynomial of degree at most n and w y such thatpw py then there is an x such that w x y andpx
Consider the statement called IHn
For any ordered eld E there is an ordered eld F such that E Fand E j n
IH is true since any ordered eld E j We will prove below that for eachn IHn implies IHn Given our model A j ORF we will then be able to construct a chain of models
A B B Bn Bn such that each Bn j ORF fng Let B be the union of the chain Since thetheory ORF is preserved under unions of chains see Exercise B j ORFFurthermore the nature of the sentences n allows us to conclude that for each nB j n and so B j RCF All that remains is to prove that for each n IHnimplies IHn We rst make a claim
Claim If E j ORFfng and p is a polynomial of degree at most n withcoecients from E and a d are in E such that pa pd then there isa model F such that E F F j ORF and there is b such that a b d andpb
Let us rst see how this claim helps us to prove that IHn implies IHnLet E j ORF we will use the claim to build a model F such that E F andF j nWe rst construct a chain of models of ORF
E E E Em Em such that for each m and each polynomial p of degree at most n with coe!cientsfrom Em and each pair of a d of elements of Em such that pa pd thereis a b Em such that a b d and pb Suppose Em has been constructed we construct Em as follows let "m be
the set of all existential sentences of LEm of the formxca x x cd px
where p is a polynomial of degree at most n and such that ca cd and thecoe!cients of the polynomial p are constant symbols from LEm and
EmEm j pca pcd
We claim that
ORF Em "mis satisable

THE SEVENTEENTH PROBLEM
Using the Compactness Theorem it su!ces to nd for each nite subsetf kg of "m a model C such that Em C and
C j ORF f kgBy IHn obtain a model F such that Em F and F j ORF fng By theclaim obtain a model F such that F F and F j ORFfg Again by IHnobtain F such that F F and F j ORFfng Again by the claim obtain Fsuch that F F and F j ORF fg Continue in this manner getting modelsof ORF
Em F Fkwith each Fj j j Since each j is existential we get that Fk is a model of eachj see Exercise
Let D j ORF Em "mand then use the Diagram Lemma to get Em such that Em Em Em j ORFand Em j "m thus satisfying the required property concerning polynomials fromEmLet F be the union of the chain Since ORF is a universalexistential theory
F j ORF see Exercise and F j n by construction So IHn is provedWe now nish the entire proof by proving the claim
Proof of Claim If px for some x in E such that a x d then wecan let F E Otherwise introduce a new element b to E where the place of b inthe ordering is given by
b supremumft E t d and pt gNote that continuitystyle considerations show that b dWe now show that since E j n the polynomial p cannot be factored in E
Suppose px qx sx The denition of b allows us to nd a and d such thata b d and pa pd and such that other than possibly b q and shave no roots in the interval of E between a and d Now since pa pd either qa qd or sa sd and q and s each have degree n forcingb to be an element of EThe fact that p is irreducible over E means that we can extend hE i
by quotients of polynomials in b of degree n to form a eld hF i in theusual way We leave the details to the readerNote that the construction cannot force qb for any polynomial qx with
coe!cients from E of degree n This is because we could take such a qx oflowest degree and divide px by it to get
px qx sx rx
where degree of r degree of q This means that rx constantly and so pcould have been factored over ENow we must expand hF i to an ordered eld F while preserving the
order of E We are aided in this by the fact that if q is a polynomial of degree atmost n with coe!cients from E then there are a and a in E such that a b aand q doesnt change sign between a and a this comes from the fact that E j n

THE SEVENTEENTH PROBLEM
Proof of the Corollary Using Lemma we see that it su!ces to provethe corollary for a polynomial px xn such that pa an for alla an RLet B hRx xn i be the eld of rational functions Note
that B contains the reduct of R to f g as a subeld where R is dened asin Example as the usual real numbersBy Lemma if p is not the sum of squares in B then we can nd an ordering
B on B extending the ordering on the reals such that the expansion B of B is
an ordered eld and px xn B We now use Lemma to embed B as a submodel of a real closed eld M
B MLet v vn be the quantier free formula which we informally write as
pv vn where involves constant symbols cri for the real coe!cients riof p Let be the formula of the language of eld theory obtained from bysubstituting a new variable ui for each cri We have
B j v vnr rkand so M j v vnr rk
Since RCF is model complete and R B M Theorem gives R M andso
R j v vnr rkie there exist a an in R such that pa an
Hilbert also asked
If the coe!cients of a positive denite rational function are rationalnumbers ie it is an element of Qx xn is it in fact the sumof squares of elements of Qx xn(
The answer is yes and the proof is very similar Let Q hQi bethe ordered eld of rationals as in Example Lemma holds for A Q andB hQx xn i by Lemma every positive rational number is thesum of squares since every positive integer is the sum of squares n
Exercise Finish the answer to Hilberts question by making any appropriate changes to the proof of the corollary Hint create an ordering on Rx xnso that B and R are each submodels

CHAPTER
Submodel Completeness
Definition A theory T is said to admit elimination of quantiers in Lwhenever for each formula v vp of L there is a quantier free formulav vp such that
T j v vpv vp v vp
Remark There is a ne point with regard to the above denition If isactually a sentence of L there are no free variables v vp So T j for some quantier free formula with no free variables But if L has no constantsymbols there are no quantier free formulas with no free variables For thisreason we assume that L has at least one constant symbol or we restrict to thoseformulas with at least one free variable This will become relevant in the proofof Theorem for
Exercise If T admits elimination of quantiers in L and L has no constantsymbols show that for each sentence of L there is a quantier free formula vsuch that
T j v vDefinition A theory T is said to be submodel complete whenever T A
is complete in LA for each submodel A of a model of T Exercise Use Theorem and the following theorem to nd four proofs
that every submodel complete theory is model complete
Theorem Let T be a theory of a language L The following are equivalent T is submodel complete If B and C are models of T and A is a submodel of both B and C then every
existential sentence which holds in BA also holds in CA T admits elimination of quantiers whenever A B A C B j T and C j T there is a model D such that
both BA and CA are elementarily embedded in DA
Proof Let B j T and C j T with A B and A C Then BA j T A andCA j T A So and Lemma give BA CA Thus is in fact proved forall sentences not just existential ones
Lemma shows that it su!ces to prove for formulas in prenex normal formWe do this by induction on the prenex rank of This claim is the rst step
Claim For each existential formula v vp of L there is a quantier freeformula v vp such that
T j v vp

SUBMODEL COMPLETENESS
Proof of Claim Add new constant symbols c cp to L to formL L fc cpg
and to form a sentence of L obtained by replacing each instance of vi in withthe corresponding ci
is an existential sentence It su!ces to prove that there isa quantier free sentence of L such that
T j
Let S f quantier free sentences of L T j gIt su!ces to nd some in S such that T j Since a nite conjunction ofsentences of S is also in S it su!ces to nd n in S such that
T j n
If no such nite subset f ng of S exists then eachT f ng fg
would be satisable So it su!ces to prove that T S j Let C j T S with the intent of proving that C j Let A be the least
submodel of C in the sense of the language L That is every element of A is theinterpretation of a constant symbol from L fc cpg or built from these usingthe functions of C We can ensure that L LA
Let P f of A is a sentence of LgWe wish to show that T fg P is satisable By compactness it su!ces toconsider T f g where is a sentence in P If this set is not satisable thenT j so that by denition of S we have S and hence C j Butthis is impossible since A C means that CA j ALet B j T fgP The interpretations of fc cpg generate a submodel
of B isomorphic to A So there is a model B for L such that B B and A BIn order to invoke we use the restrictions AjL BjL and CjL of A B and C
to the language L We have BjL j T CjL j T AjL BjL and AjL CjL isan existential sentence of L LA and since B j we have BjLA j Soby CjLA j and nally C j which completes the proof of the claim
We now do the general cases for the proof of the induction on prenex rankThere are two cases corresponding to the two methods available for increasing thenumber of alternations of quantiers
a the addition of universal quantiersb the addition of existential quantiers
For case a suppose v vp is w wmv vp w wm and has prenex rank lower than Then also has prenex rank lower than and we can use the inductive hypothesis on to obtain a quantier free formulav vp w wm such that
T j v vpw wm
So T j v vpw wm w wm

SUBMODEL COMPLETENESS
By the claim there is a quantier free formula v vp such that
T j v vpw wm
So T j v vpw wm
So T j v vpw wm and so is the quantier free formula equivalent to For case b suppose v vp is w wmv vp w wm and
has prenex rank lower than We use the inductive hypothesis on to obtain aquantier free formula v vp w wm such that
T j v vpw wm
So T j v vpw wm w wm
By the claim there is a quantier free formula v vp such that
T j v vpw wm
So T j v vpw wm
and so is the quantier free formula equivalent to This completes the proof Let A B A C B j T and C j T Using the Elementary Diagram
Lemma it will su!ce to show that ThBB ThCC is satisable Without loss ofgenerosity we can ensure that LB LC LABy the Robinson Consistency Theorem it su!ces to show that there is no
sentence of LA such that bothThBB j and ThCC j
Suppose is such a sentence ThBB j Let fca capg be the set ofconstant symbols from LA n L appearing in Let v vp be obtained from by exchanging each cai for a new variable
ui Let v vp be the quantier free formula from
T j v vp
Let be the result of substituting cai for each ui in is also quantier
freeSince BB j B j a ap Since B j T B j a ap and so
BA j Since is quantier free and AA BA we have AA j sinceAA CA we then get that CA j Hence C j a ap and then sinceC j T we then get that C j a ap But then this means that CA j andso CC j so is in ThCC and we are done
Let B j T and A B we show that T A is complete Noting that BA jT A we see that it su!ces by Lemma to show that BA C for eachC j T AFor each such C by the Diagram Lemma there is a model C for L such that
A C and CA C Then C j T so by there is a D into which both BA andCA are elementarily embeddedIn particular BA DA CA so we are done
Example Chang and KeislerLet T be the theory in the language L fU VWR Sg where U V and W are

SUBMODEL COMPLETENESS
unary relation symbols and R and S are binary relation symbols having axiomswhich state that there are innitely many things that U V W is everythingthat U V andW are pairwise disjoint that R is a onetoone function from U ontoV and that S is a onetoone function from U V onto W
Exercise Show that T above is complete and model complete but notsubmodel completeHints For completeness use the LosVaught test and for model completeness
use Lindstroms test For submodel completeness use of the theorem withB j T and A B where a A fb B B j W vbg along with thesentence
vUv Sv ca
Remark We will prove that each of the following theories admits eliminationof quantiers
dense linear orders with no end points DLO algebraically closed elds ACF real closed ordered elds RCF
C H Langford proved elimination of quantiers for DLO in The cases ofACF and RCF were more di!cult and were done by A Tarski Thus by Exercise we will have model completeness of RCF which was promised at the beginning ofChapter
Exercise Use part of the previous theorem and the fact that RCFadmits elimination of quantiers to prove that RCF is complete another resultoriginally due to A TarskiHint Show that Q of Example can be isomorphically embedded into any real
closed eld and then use from Theorem
Exercise Let T be the theory DLO in the language L f c cg wherec and c are constant symbols Use the fact that DLO admits elimination ofquantiers in its own language fg to show that T is submodel complete Butshow also that T is not completeAs an application of quantier elimination of ACF we have the following
Corollary TarskiThe truth value of any algebraic statement about the complex numbers can be determined algebraically in a nite number of steps
Proof Let C be the complex numbers in the language of eld theory L let be a sentence of LC Then letA be the nite subset of C consisting of these elementsof C other than or which are mentioned in Let be the formula of Lformed by exchanging each ca for a new variable Then ACF j v vp for some quantier free Hence C j i C j a ap i C j a apbut checking this last statement amounts to evaluating nitely many polynomialsin a ap
Remark In fact Tarskis original proof actually gave an explicit method fornding the quantier free formulas and this led via the corollary above to an effective decision proceedure for determining the truth of elementary algebraic statements about the reals or the complex numbers

SUBMODEL COMPLETENESS
As an application of quantier elimination of RCF we have
Corollary The TarskiSeidenberg TheoremThe projection of a semialgebraic set in Rn to Rm for m n is also semi
algebraic The semialgebraic sets of Rn are dened to be all those subsets of Rn
which can be obtained by repeatedly taking unions and intersections of sets of theform
fhx xni Rn px xn gand fhx xni Rn qx xn g
where p and q are polynomials with real coecients
Proof We rst need two simple results which we state as exercises Let Lbe the language of RCF augumented with a constant symbol for each element ofthe reals R Let T be RCF considered as a theory in this language
Exercise T admits elimination of quantiers as a theory in the languageLLet R hR i be the usual model of the reals then RR is a model
for the language LExercise A set X Rn is semialgebraic i there is a quantier free
formula v vn of L such thatX fhx xni RR j x xng
Now in order to prove the corollary let X Rn be semialgebraic and let be its associated quantier free formula The projection Y of X into Rm is
Y fhx xmi wm wnhx xm xm xni Xg fhx xmi RR j vm vnx xmg
Since T admits elimination of quantiers there is a quantier free formula of Lsuch that
T j v vmvm vn
So RR j vm vnx xm i RR j x xm
So Y fhx xmi RR j x xmgand by the exercise Y is semialgebraic

CHAPTER
Model Completions
Closely related to the notions of model completeness and submodel completeness is the idea of a model completion
Definition Let T T be two theories in a language L T is said to bea model completion of T whenever T A is satisable and complete in LA foreach model A of T
Lemma Let T be a theory in a language L If T is a model completion of T then for each A j T there is a B j T
such that A B If T is a model completion of T then T is model complete If T is model complete then it is a model completion of itself If T
and T
are both model completions of T then T
j T
and T
j T
Proof Easy Just use the diagram lemma and the word satisable inthe denition of model completion Easier Easiest This needs a proof Let A j T
It will su!ce to prove that A j T
Let A A since A j T and T
is a model completion of T we obtain from a model A j T
such that A A Similarly since A j T and T
is amodel completion of T we obtain A j T
such that A AContinuing in this manner we obtain a chain
A A A An An Let B be the union of the chain fAn n Ng Each even An j T
By and of Theorem we get that for each n An An and by the ElementaryChain Theorem A B Similarly A B so A A and hence A j T
Remark Part of the above lemma shows that model completions are essentially unique That is if model completions T
and T
of T are closed theoriesin the sense of Denition then T
T
Since there is no loss in assumingthat model completions are closed theories we speak of the model completion of atheory T
Lemma If T T are theories for a language L such that for each A j Tthere is a B j T such that A B then the following are equivalent
T is the model completion of T For each A j T B j T and C j T such that A B and A C we have
a model D such that both BA and CA are elementarily embedded into DA

MODEL COMPLETIONS
For each A j T B j T and C j T such that A B and A C we havea model D such that BA DA and CA is elementarily embedded into DA
For each A j T B j T and C j T such that A B and A C we havea model D such that BA is isomorphically embedded into DA and C D
Proof By the Elementary Diagram Lemma it su!ces to provethat the union of the elementary diagrams of BA and CA is satisable By theRobinson Consistency Theorem it su!ces to show that there is no sentence ofLA such that ThBA j and ThCA j Indeed if ThBA j then BA j Now T A is a complete theory in LA
and both BA j T A and CA j T A so BA CA Therefore CA j and hence is in ThCA and easily follow from the denitions We rst show that T is model complete using Theorem we show
that T is existentially complete Let A j T we show that A is existentiallyclosed Let B j T such that A B and let be an existential sentence of LAwith BA j our aim is to prove that AA j We invoke with C A to get a model D such that A D and an isomorphic
embedding f BA DA Since is existential it is of the form v vp forsome quantier free formula v vp of LA
BA j v vpSo for some b bp in B we have
BA j b bp
By Exercises and we have
DA j fb fbp
and so
DA j v vpNow A D implies that AA DA so
AA j v vpHence AA j and T is model completeWe now show that T is the model completion of T Let A j T by the
hypothesis on T and T we have that T A is satisable We show that T Ais complete in LA by showing that for each B j T and C j T with A B andA C we have BA CALetting B and C be as above we invoke to obtain a model D such that
BA is isomorphically embedded into DA and C D C D gives that D j T The isomorphic embedding gives us a model E such that B E and DA EA SoE j T Using model completeness of T and Theorem we can conclude thatB E We have
BA EA DA CAand we are done
Lets compare the denitions of model completion and submodel complete LetT be the model completion of T Then T will be submodel complete provided

MODEL COMPLETIONS
that every submodel of a model of T is a model of T Unfortunately this is notalways the caseHowever this seems like a promising approach to show submodel completeness
and hence elimination of quantiers of some theories T we just need to showthat T is the model completion of some theory T and T has the property thatevery submodel of a model of T is also a model of T Since T T it would beenough to show that every submodel of a model of T is again a model of T Andthis is indeed the case whenever T is a universal theory that is whenever T has aset of axioms consisting of universal sentencesOur ultimate aim is to show that DLO ACF and RCF are submodel complete
We will in fact show that these theories are the model completions of LOR FEIand ORF respectively See Example to recall the axioms for these theories NowLOR is a universal theory but FEI and ORF are not The culprits are the existenceaxioms for inverses
xyx y and xyy x In fact a submodel A of a eld B is only a commutative ring not necessarily asubeld Nevertheless A generates a subeld of B in a unique way This motivatesthe following denition
Definition A theory T is said to be almost universal whenever A BB j T and A C C j T imply there are models D and E such that D j T A D B and E j T A E C and DA EA
Example LOR is almost universal since any universal theory T is almostuniversal just let D E A and note A j T
Example FEI is almost universal just let D and E be the subelds ofB and C respectively generated by A The isomorphism DA EA is the naturalone obtained from the identity map on A
Example ORF is almost universal again just letD and E be the orderedsubelds of B and C respectively generated by A The extension of the identitymap on A to the isomorphism DA EA is aided by the fact that the orderplacement of the inverse of an element a is completely determined by the orderplacement of a
Theorem Let T and T be theories of the language L such that T is almostuniversal and T is the model completion of T Then T is submodel complete
Proof We show that condition of Theorem is satised Let B and Cbe models of T with A a submodel of both B and C We will show that in factBA CANow T T so B j T and C j T Since T is almost universal there are
models D and E of T such that A D B A E C and DA EA SoBD j T D and CE j T ENow BD is a model for the language LD whereas CE is a model for LE We
wish to obtain a model C for LD which looks exactly like CE We just let C
be C and in fact let CjLA CEjLA The interpretation of a constant symbolcd LD n LA is the interpretation of ce LE n LA in CE where the isomorphismDA EA takes d to e

MODEL COMPLETIONS
Now D j T and since T is the model completion of T T D is completeThe isomorphism DA EA ensures that C
j T D So BD C HenceBDjLA CjLA that is BA CA
The way to show that DLO ACF and RCF admit elimination of quantiers isnow clear We will use Theorem and This reduces to showing that DLOACF and RCF are the model completions of LOR FEI and ORF respectively Todo this we will use Lemma so we rst need to show that each pair of thesetheories satisfy the general hypothesis of Lemma if A j T then there is aB j T such that A BFor the case T LOR and T DLO is easy every linear order can be
enlarged to a dense linear order without endpoints by judiciously placing copies ofthe rationals into the linear orderThe case T FEI and T ACF is just the well known fact that every eld
has an algebraic closureThe case T ORF and T RCF is just Lemma So all that remains of the quest to prove elimination of quantiers for DLO
ACF and RCF is to verify condition of Lemma in each of these cases Werephrase this condition slightly as
For each A j T B j T and C j T with A B and A C thereis a D such that C D and an isomorphic embedding f B D
such that f A is the identity on A
At this point the reader may already be able to verify this condition for one ormore of the pairs T LOR and T DLO T FEI and T ACF or T ORFand T RCF However the remainder of this chapter is devoted to a uniformmethod
Definition Let L be a language and "v a set of formulas of L in thefree variable v A model A for L is said to realize "v whenever there is somea A such that A j a for each v in "v
Definition The set of formulas "v in the free variable v is said to bea type of the model A whenever
every nite subset of "v is realized by A "v is maximal with respect to
Remark Every set of formulas "v having property of the denition oftype can be enlarged to also have property
Lemma Suppose A is an innite model for a language L Let X A andlet "v be a type of AX in the language LX Then there is a B such that A Band BX realizes "v
Proof Let T ThAA "c where c is a new constant symbol and "c fc "vg and of course c is v with c replacing vBy denition of type for each nite T T there is an expansion A of A such
that A j T The Elementary Diagram Lemma and the Compactness Theoremwill complete the proof

MODEL COMPLETIONS
Lemma Suppose A is an innite model for a language L There is a modelB for L such that A B and BA realizes each type of AA in the language LA
Proof Let f"v Ig enumerate all types of AA in the language LAFor each I introduce a new constant symbol c and let
"c fc "vgLet " f"c Ig Let " " be any nite subset
Claim " ThAA is satisable for the language LA fc IgProof of Claim Let "v "nv be nitely many types such that
" "c "c "ncnBy Lemma there is a model A such that A A and AA realizes "vUsing Lemma repeatedly we can obtain
A A A An
such that each AjA realizes "j vNow A An so AnA j ThAA It is easy to check that since each Aj An
An realizes each "j v and furthermore so does AnA So we can expand AnAto the language LA fc cng to satisfy " ThAA
By the claim and the Compactness Theorem there is a model C j "ThAABy the Elementary Diagram Lemma A is elementarily embedded into CjL therestriction of C to the language L Therefore there is a model B for L such thatA B and BA CjLA It is now straightforward to check that BA realizes eachtype "v
Definition A model A for L is said to be saturated whenever we havethat for each X A with jX j AX realizes each type of AX
Recall that is dened to be the cardinal number just larger than So amodel A will be saturated whenever we have that for each X A with jX j AX realizes each type of AX In particular if B is any innite set A will be jBjsaturated whenever we have that for each X A with jX j jBj AX realizes eachtype of AX
Remark A model A is said to be saturated whenever it is jAjsaturatedwhere jAj is the size of the universe of A For example hQi is saturated toprove this let X be a nite subset of Q and let "v be a type of hQiX ByLemma and the Downward LowenheimSkolem Theorem get a countable B suchthat hQiX BX and B realizes "v Use the hint for Exercise to show thathQiX BX and then note that this means that "v is realized in hQiX
Lemma R VaughtSuppose C is an innite model for L and B is an innite set There is a jBjsaturated model D such that C D

MODEL COMPLETIONS
Proof We build an elementary chain
C C C C Cn n N
such that for each n N CnCnrealizes each type of CnCn
This comesimmediately by repeatedly applying Lemma Let D be the union of the chainthe Elementary Chain Theorem assures us that C D and indeed each Cn DLet X D with jX j jBj and let "v be a type of DX If X Cn for some
n then "v is a type of CnX since CnX DX Now "v can be enlarged toa type of CnCn
which is realized in CnCnand so "v is realized in CnCn
Since CnCn
DCn we can easily check that "v is realized in DCn
Since"v involves only constant symbols associated with X we have that DX realizes"vWe have almost proved that D is jBjsaturated but not quite because there
is no guarantee that if
X D fCn n Ngand jX j jBj then X Cn for some n However there would be no problem ifX was nite The problem with innite X is that the elementary chain is not longenough to catch X The solution is to upgrade the notion of an elementary chain to include chains
which are indexed by any well ordered set not just the natural numbers We sketchthe appropriate generalization of the above argument from the case of hNi to thecase of an arbitrary well ordered set hIi with least element We construct an elementary chain of models
C C C I
recursively as follows At stage suppose we have already constructed C for each I with The union of the chain up to
E fC I and gfalls under the scope of an upgraded Elementary Chain Theorem which is provedexactly as Theorem and so C E for each I with We now useLemma as before to get C such that E C and CE realizes each type ofEEAs before let D fC Ig be the union of the entire chain and by the
upgraded Elementary Chain Theorem C D Also as before DX realizes eachtype of DX for each X D such that X C for some I But now we can complete the proof of the lemma by choosing a well ordered
set hIi large enough so that ifX D fC Ig
and jX j jBj then there is some I such that X C Such a well ordered setis well known to exist for example any ordinal with conality jBj
Definition We say that B is a simple extension of A whenever
A B and there is some b B such that no properly smaller submodel of B containsA fbg

MODEL COMPLETIONS
Theorem Blums TestSuppose T T are theories of a language L Suppose further that
T is an almost universal theory every model of T can be extended to a model of T and for each A j T B a submodel of a model of T C j T such that C is jBj
saturated A C and B is a simple extension of A there is an isomorphicembedding f B C such that f A is the identity on A
Then
for each A j T B j T and C j T with A B and A C there is amodel D such that C D and an isomorphic embedding f B D suchthat f A is the identity on A
T is the model completion of T and T admits elimination of quantiers
Proof Because of Lemma Theorem and Theorem and followfrom and We will therefore only need to prove Let A B and C be as in Using Lemma we obtain a jBjsaturated
model D such that C D We wish to nd an isomorphic embedding f B D
which is the identity on A Let f be a maximal element of
fg for some B B g is an isomorphic embedding from B into D
such that g A is the identity on Agin the sense that no other such g properly extends f We will prove that this fsatises condition The proof is by contradiction suppose f B D andB B
Claim There is a model G such that B G B G j T and a model Hsuch that G H and an isomorphism j H D such that j B f
Proof of Claim From the isomorphic embedding f B D we get amodel E such that B E and an isomorphism e E D such that e B f We have B E and B B with both E j T and B j T By condition
there are models F and G of T such that B F E B G B and FB GB
This gives an isomorphic embedding g G E such that g B is the identitymapFrom g we get a model H such that G H and an isomorphism h H E such
that h G g Now let j e h Thus j is an isomorphism from H to D suchthat
j B e h B e g B e B f
which nishes the proof of the claim
Once we have the claim there are two cases G B and G BFor the case G B there must be some b B nG and we use b to form the
simple extension B of G by b Now use condition on G B and H to obtainan embedding k B H which is the identity map on G Now j k extends f which is a contradictionFor the case G B the function j G extends f and gives the contradiction

MODEL COMPLETIONS
The following lemma completes the proofs that each of the theories DLO ACFand RCF admit elimination of quantiers
Lemma Each of the following three pairs of theories T and T satisfy condition of Blums Test
T LOR theory of linear orderings T DLO theory of dense linearorderings without endpoints
T FEI theory of elds T ACF theory of algebraically closed elds T ORF theory of ordered elds T RCF theory of real closed elds
Proof of Let A and B be linear orders with B A fbg and A BLet C be a jBjsaturated dense linear order without endpoints with A CWe wish to nd an isomorphic embedding f B C which is the identity on
AConsider a type of CA containing the following formulas
ca v for each a A such that a b
v ca for each a A such that b a
Since C is a dense linear order without endpoints each nite subset of the type canbe realized in CASaturation now gives some t C realizing this typeWe set fb t and we are nished
Proof of Let A be a eld and B a simple extension of A witnessed by bsuch that B is a submodel of a eld a commutative ringLet C be a jBjsaturated algebraically closed eld such that A CWe wish to nd an isomorphic embedding f B C which is the identity on
AThere are two cases
I b is algebraic over AII b is transcedental over A
CaseI Let p be a polynomial with coe!cients from A such that pb but b is not the root of any such polynomial of lower degree Since C is algebraicallyclosed there is a t C such that pt We extend the identity map f on Ato make fb t We extend f to the rest of B by letting frb rt for anypolynomial r with coe!cients from A It is straightforward to show that f is stilla welldened isomorphic embedding
Case II Let us consider a type of CA containing the following set of formulas
fpv gwhere p is a polynomial with coe!cients in fca a AgSince C is algebraically closed it is innite and hence each nite subset is
realized in CASaturation will now give some t C such that t realizes the typeWe set fb t Since t is transcedental over A the extension of f to all of B
comes easily from the fact that every element of B n A is the value at b of somepolynomial function with coe!cients from A

MODEL COMPLETIONS
Proof of Let A be an ordered eld andB be a simple extension of A witnessed by b such that B is a submodel of an ordered eld an ordered commutativeringLet C be a jBjsaturated real closed eld such that A CWe wish to nd an isomorphic embedding f B C which is the identity on
AThere are two cases
I b is algebraic over AII b is transcedental over A
Case I Since b is algebraic over A we have a polynomial p with coe!cientsin A such that pb All other elements of the universe of the simple extensionB are of the form qb where q is a polynomial with coe!cients in A Beforebeginning the main part of the proof we need some algebraic facts
Claim Let D be a real closed ordered eld and qx be a polynomial over Dof degree n Then for any e D we have
qx nX
m
qme
m'x em
where qm stands for the polynomial which is the mth derivative of q
Proof of Claim This is Taylors Theorem from Calculus unfortunately wecannot use Calculus to prove it because we are in D not necessarily the reals RHowever the reader can check that the Binomial Theorem gives the identity for thespecial cases of qx xn and that these special cases readily give the full result
Claim Let D be a real closed ordered eld and qx a polynomial over D withe D and qe If there is an a e such that qx for all a x e thenqe If there is an a e such that qx for all e x a then qe Here q is the rst derivative of q
Proof of Claim From the previous claim we get
qx qe
x e qe x e
nX
m
qme
m'x em
for any x e in D By choosing x close enough to e we can ensure that the entireright hand side has the same sign as qe A proof by contradiction now followsreadily
Claim Let D be a real closed ordered eld and qx be a polynomial over Dwith e D and qe If w and z are inD such that w e z and qwqz then there is a d in D such that w d z and qd

MODEL COMPLETIONS
Proof of Claim Without loss of generosity qw and qz Since qhas only nitely many roots we can pick d to be the least x such that w x eand qx Since qx for all w x d the Intermediate Value Propertyof Real Closed Ordered Fields shows that q cannot change sign here and so qx for all w x d By the previous claim q
d A similar argument withz shows that there is a d such that e d z and qd If d e dtake d e If d d the Intermediate Value Property gives a d with the requiredproperties
Claim Let D be a real closed ordered eld with an ordered eld E D Letf E C be an isomorphic embedding into a real closed ordered eld Let q be apolynomial with coecients in E such that fx D qx g E Let d D nEbe such that qd but d is not a root of a polynomial with coecients from E
which has lower degree Then f can be extended over the subeld of D generatedby E fdg
Proof of Claim Since the nitely many roots of q from D actually lie inE we can get e and e in E such that e d e and q
x for all x in Dsuch that e x e Furthermore for all x in E we have qx We can nowapply the previous claim to get that qw qz for all w and z in E such thate w d z eWe now move to the real closed ordered eld C and the isomorphic embedding
f For each w and z in E such that e w d z e we have fw fzand qfw qfz By the Intermediate Value property of C we get foreach such w and z a y C such that fw y fz and qy Since q hasonly nitely many roots there is some t C such that qt fw t for alle w d and t fz for all d z eWe now extend f by letting fd t and frd rt for any polynomial
r with coe!cients from E It is straightforward to check that the extension is awelldened isomorphic embedding of the simple extension of E by d into C Weuse the fact that ORF is almost universal to extend the isomorphic embedding toall of the subeld of D generated by E fdg since we can rephrase the denitionof almost universal as follows
Whenever C j T D j T E D and f E C is an isomorphicembedding then there is a model E j T such that E E Dand f extends over E
It is now time for the main part of the proof of this case Using Lemma let D be a real closed ordered eld with B D We have a polynomial p withcoe!cients fromA such that pb By induction on the degree of p we can showthat there is a sequence of elements d dm b of elements of D a sequence ofsubelds of D
A E E Emwith each dj Ej nEj and corresponding isomorphic embeddings
fj Ej C

MODEL COMPLETIONS
coming from the previous claim and having the property that f is the identity andfj extends fj In this way we extend the identity map f A C until wereach fm Em C We then note that since b Em we have B Emand we are nished
Case II Let us consider a type of CA containing the following formulas
ca v for all a A with a b
v ca for all a A with b a
pv for all polynomials p with coe!cients in fca a AgSince each interval of C is innite each nite subset of this type is realized by
CASaturation now gives t C which realizes this type We put fb t We can
now extend f on the rest of B nA since each such element is the value at b of apolynomial function with coe!cients from A
Question Suppose K is the reduct of a real closed ordered eld to the languageof eld theory Can you show that K
p is algebraically closed using ModelTheory and the Fundamental Theorem of Algebra(

Bibliography
J Barwise ed Handbook of Mathematical Logic North Holland J L Bell and A B Slomson Models and Ultraproducts North Holland Felix E Browder ed Mathematical developments arising from Hilberts problems Proceed
ings of Symposia in Pure Mathematics vol XXVIII Parts and II AMS S Buechler Essential Stability Theory Perspectives in Mathematical Logic Springer C C Chang and H J Keisler Model Theory second ed North Holland G Cherlin Model Theoretic Algebra Selected Topics LNM Springer Verlag N Jacobson Basic Algebra I W H Freeman H J Keisler Foundations of Innitesimal Calculus Prindle Weber and Schmidt M D Morley ed Studies in Model Theory MAA Studies in Mathematics MAA A Robinson Introduction to Model Theory and the Metamathematics of Algebra second ed
North Holland Non Standard Analysis North Holland G E Sacks Saturated Model Theory W A Benjamin Inc D H Saracino and V B Weispfenning eds Model theory and algebra A Memorial Tribute
to Abraham Robinson LNM Springer Verlag S Shelah Classication Theory and the Numbers of Nonisomorphic models second ed North
Holland J R Shoeneld Mathematical Logic Addison Wesley A Tarski A Descision Method for Elementary Algebra and Geometry second ed The Rand
Corporation

Index
A B
A fAn n Ng ThA ThAA j
AjL tx xq
hC i hQ i
hR i hN i
A Robinson ACF submodel complete
algebraically closed elds
axiomstheory of almost universal axioms
Blums Test bound variable
categorical categorical theory
chain of models
elementary Compactness Theorem complete theory Completeness Theorem
complex Craig Interpolation Theorem
dense linear orders without endpointsaxiomstheory of
diagram lemmas DLO
submodel complete
elementarily embedded model
elementarily equivalent models Elementary Chain Theorem elementary diagram elementary extension
elementary submodel
elimination of quantiers
existentially closed expansionlanguage model
FEI almost universal
eldsaxiomstheory of
formula free variable
isomorphic models isomorphically embedded model
language Leibniz Principle Lindstroms Test linear ordersaxiomstheory of
LOR almost universal
Los Vaught Test Lowenheim Skolem TheoremsDownward Upward
model satises
model complete theory model completion submodel complete
Number Theory number theorynon standard models
ordered eld ordered eldsaxiomstheory of
ORF almost universal
prenex normal form
rational numbers
RCF submodel complete

INDEX
real closed ordered eld real closed ordered eldsaxioms theory axiomstheory of Intermediate Value Property
real numbers realize reductionlanguage model AjL
Robinson Consistency Theorem
satisfactionA j
saturated saturated model
sentence simple extension subformula submodel submodel complete submodel complete theory
T Skolem Tarskis Elementary Chain Theorem Tarski Vaught Condition term theory almost universal model completion
theory of A type
variable

Green’s functions for planarly layered media (continued)
Massachusetts Institute of Technology
6.635 lecture notes
We shall here continue the treatment of multilayered media Green’s functions, starting from
the TE/TM decomposition we have presented in the previous document.
For the sake of illustration, let us consider a one layer medium with a reflection and trans-
mission region, as shown in Fig. 1.
PSfrag replacements
#0: (ε0, µ0)
#1: (ε1, µ1)
#2: (ε0, µ0)
J(r′)
x
z
z′
−d
0
Figure 1: Geometry of the problem.
.
We have shown before that the Green’s functions in various layers are expressed as:
G`0 =i
8π2
∫∫
dk⊥1
k0z
[
Ke(k`z)e(−k0z) e−iK·r
′
+ Kh(k`z)h(−k0z) e−iK·r
′
]
, (1)
where
` = 0 , z < z′ : Ke(k0z) = e(−k0z
) eiK·r +RTE e(k0z) eik·r , (2a)
Kh(k0z) = h(−k0z
) eiK·r +RTM h(k0z) eik·r , (2b)
` = 1 : Ke(k1z) = A e(k1z
) eik1·r +B e(−k1z) eiK1·r , (2c)
Kh(k1z) = C h(k1z
) eik1·r +D h(−k1z) eiK1·r , (2d)
` = 2 : Ke(k2z) = T TE e(−k0z
) eiK·r , (2e)
Kh(k2z) = T TM h(−k0z
) eiK·r . (2f)
1

2 Section 1. Transmission line analogy for multilayered media
By satisfying the boundary conditions at z = 0 and z = −d, we obtain the following system
(for TE waves, TM waves can be solved similarly):
1 +RTE =A+B (3a)
k0z
µ0(−1 +RTE) =
k1z
µ1(A−B) , (3b)
Ae−ik1zd +Beik1z
d = T TE eik0zd , (3c)
k1z
µ1(Ae−ik1z
d −Beik1zd) = − k0z
µ0T TEeik0z
d . (3d)
Upon solving, we obtain:
RTE =1− e2ik1z
d
1 +RTE01 RTE
10 e2ik1zdRTE01 , (4a)
T TE =4ei(k1z
−k0z)d
(1 + pTE01 ) (1 + pTE10 ) (1 +RTE01 RTE
10 e2ik1zd). (4b)
RTM =1− e2ik1z
d
1 +RTM01 RTM
10 e2ik1zdRTM01 , (5a)
T TM =4ei(k1z
−k0z)d
(1 + pTM01 ) (1 + pTM10 ) (1 +RTM01 RTM
10 e2ik1zd). (5b)
A =1− pTE10
2
1 +RTE01 RTE
10
1 +RTE01 RTE
10 e2ik1zde2ik1z
d , (6a)
B =1 +RTE
01
1 +RTE01 RTE
10 e2ik1zd, (6b)
C =µ1k0
µ0k1
2RTM10
(1 + pTM01 ) (1 +RTM01 RTM
10 e2ik1zd)e2ik1z
d , (6c)
D =µ1k0
µ0k1
2
(1 + pTM01 ) (1 +RTM01 RTM
10 e2ik1zd). (6d)
1 Transmission line analogy for multilayered media
Let us consider a plane wave incident from region 0, with its plane of incidence parallel to the
(xz) plane. The medium it is incident upon is multilayered.
All fields vectors are independent on y, so that ∂∂y
= 0 in Maxwell’s equations. Thus, we
can decompose the electromagnetic field into TE/TM components.
We get, in region ` (for TE waves):

3
E`y =[A`eikzz +B`e
−ikzz] eikxx , (7a)
H`x =− kz`
ωµ`[A`e
ikzz −B`e−ikzz] eikxx , (7b)
H`z =kx
ωµ`[A`e
ikzz −B`e−ikzz] eikxx . (7c)
Following standard notation in transmission line the-
ory, we shall use here the j notation!!
From 6.630, we know that a transmission line is characterized by its length d, characteristic
impedance Z(p)c and wavenumber kz, as defined in Fig. 2.PSfrag replacements
d
[Z(p)c , kz]V
(p)1 V
(p)2
I(p)1 I
(p)2
Figure 2: Transmission line circuit.
In a source-free region, the transmission line equations are written as
∂
∂zV (p) =− jkzZ
(p)c I(p) , (8a)
∂
∂zI(p) =− jkz
1
Z(p)c
V (p) , (8b)
where p refers to the polarization (TE or TM), and
ZTEc =
ωµ
kz, (9a)
ZTMc =
kz
ωε. (9b)
The solution to Eqs. (8) is:
V (p) =A(p)e−ikzz +B(p)eikzz , (10a)
I(p) =1
Z(p)c
[A(p)e−ikzz −B(p)eikzz] , (10b)
As it can be seen, there is a direct analogy between the voltage/current in a transmission
line and the components of the electric and magnetic fields. For example, referring back to
Eq. (7), we write:

4 Section 1. Transmission line analogy for multilayered media
E`y =V TE` (z)eikxx , (11a)
H`x =− ITE` (z)eikxx . (11b)
Therefore, the problem of computing the fields in multilayered media in the spectral domain
comes down to determining the voltage/current in equivalent transmission line network. The
analogy is illustrated in Fig. 3.
Figure 3: Transmission line analogy for horizontal electric source and vertical mag-
netic source. Other cases are obtained by duality.
The treatment of the source will not be demonstrated here and we shall just state the
final results (details can be found in the literature). Thus, depending on the source type and
orientation, different generators will have to be placed in the transmission line network. The
various cases are (magnetic sources can be obtained by duality):
Horizontal electric source current generator value: 1/2π
Vertical electric source voltage generator value: 1/2π
The algorithm is therefore as follows:
1. Write the field components in terms of voltage and current. Locate the source and obser-
vation point.
2. Compute the equivalent transmission line network. Locate the source (type and position)
and observation.
3. Starting from the source replace all the layers above and below the source by equivalent
impedances (see Fig. 4).
To do this, start with the extreme boundary conditions and propagate back to the source
using:

5
PSfrag replacements
Zup
Zdown
Figure 4: Equivalent upper and lower impedance.
Zin(p) = Z(p)c
Z(p)L + jZ
(p)c tan(kzd)
Z(p)c + jZ
(p)L tan(kzd)
. (12)
4. Using standard circuit theory, compute V (p) and I(p) at the upper and lower limits.
5. Propagate V (p) and I(p) until the observation point using
(
V2
−I2
)
=
(
cos(kzd) −jZ(p)c sin(kzd)
−j/Z(p)c sin(kzd) cos(kzd)
)(
V1
I1
)
. (13)
6. Get the fields in the spectral domain.
2 Coming back to the space domain: Sommerfeld integral
In the rest of these notes we come back to the i notation!!
To come back to the space domain, we need to evaluate the inverse Fourier transform. A
typical integral we have to perform is:
f(r) =1
(2π)2
∫∫
dkxdky f(kx, ky) eikxx eikyy . (14)
By symmetry of the problem (x and y axis are equivalent), we can make a change of variables
and integrate one integral analytically. The proper change of variables is the following:
kx =kρ cos kφ , x =ρ cosφ , (15)
ky =kρ sin kφ , y =ρ sinφ . (16)
We can transform the exponential part as:
eikxx eikyy = ei[kρρ cos kφ cosφ+kρρ sin kφ sinφ] = eikρρ cos(kφ−φ) , (17)
so that
f(r) =1
(2π)2
∫ 2π
0dkφ
∫
∞
0dkρ kρ f(kρ, kφ) e
ikρρ cos(kφ−φ) . (18)

6 Section 2. Coming back to the space domain: Sommerfeld integral
By rotational symmetry, f(kρ, kφ) = f(kρ). In addition, we can expand the exponential part
using the following identity:
eikρρ cos(kφ−φ) = eiβ cos θ =∞∑
m=−∞
(−i)m Jm(β) eimθ , (19)
(where β and θ have just been defined to simplify the notation in the identity and have no
connection to physical parameters).
As we can see, the exponential function is the only term depending on kφ. Performing the
integration, we get:∫ 2π−φ
−φ
eimθ =
0 if m 6= 0 ,
2π if m = 0 .(20)
Therefore, we end up with
f(r) =1
2π
∫
∞
0dkρ kρ f(kρ) J0(kρρ) , (21)
which is known as a Sommerfeld integral.
Note however that in Eq. (7b), the kernel is function of kx also, which adds a kρ cos kφ term
in the integral, so that the integral in kφ cannot be performed exactly as shown above. However,
the generalization to this case is straightforward. Upon performing the same expansion of the
Bessel function, we see that this time the non-vanishing contribution will come from the m = 1
term (or ±1 depending on how the integral is written).
Without further details, we generalize the definition of Sommerfeld integral to the nth order
as:
Sn[f ] =
∫
∞
0dkρJn(kρρ)k
n+1ρ f(kρ) , (22)
and the transformation from spectral to spatial can be summarized as follows (where A is a
function of kρ only):
spectral domain space domain
G = A G = S0[A]
G = −ikxA G = − cosφS1[A]
G = −ikyA G = − sinφS1[A]
G = −k2xA G =cos 2φ
ρS1[A]− cos2 φS0[k
2ρA]
G = −k2yA G = −cos 2φ
ρS1[A]− sin2 φS0[k
2ρA]
G = −kxkyA G =sin 2φ
ρS1[A]−
1
2sin 2φS0[k
2ρA]

7
3 Numerical evaluation of Sommerfeld integrals
Sommerfeld integrals are difficult (but not impossible) to evaluate for two reasons:
1. The spectral kernel can present poles (and in general does).
2. They have an oscillatory tail.
Fortunately these two problems appear in essentially two distinct regions.
3.1 Poles of the Green’s function
It can be shown (out of the scope here) that the poles of the Green’s functions are associated
with propagating waves (e.g. in single-mode regime, the Green’s function has only one pole).
Therefore, we must have at least one value of ` (the index of the region) where k`z is real, i.e.
k`z =√
k2l − k2ρ =√
k20ε`µ` − k2ρ (23)
must be real. Since this needs to happen in at least one layer, it yields the condition:
kρ < k0maxl
(√ε`µ`) , (24)
which puts an upper limit for the location of the poles. Although it can also be shown that poles
have to correspond to kρ > k0, we do not need this constraint here and we can limit ourselves
to the interval [0, k0maxl(√ε`µ`)].
In the lossless situation, the poles lie on the real axis, which renders the integral impossible
to evaluate as is. We therefore need to deform the contour in the complex kρ-plane:
• At infinity, convergence is ensured by Sommerfeld’s radiation condition.
• On [0, k0maxl(√ε`µ`)], we perform the integration over an ellipse, as shown in Fig. 5.
PSfrag replacements
a
b <(kρ)
=(kρ)
Figure 5: Contour deformation in the complex kρ-plane.

8 3.2 Oscillatory tail
3.2 Oscillatory tail
The problem in this case is not the divergence of the integral (it does not diverge) bu the
convergence, which is very slow because of the oscillatory behavior of the kernel. Yet, we can
apply acceleration techniques to sum the series (these acceleration techniques belong to the
family of extrapolation techniques).
For the sake of illustration, we can mention Euler’s transformation, which is one of the best
known acceleration technique:
S′n =Sn + Sn+1
2, (25)
where Sn =∑
∞
i=0 ui is the partial sum (ui being the terms of the original series).
By applying the formula repeatedly, we get:
Sk+1n =
S(k)n + S
(k)n+1
2. (26)
A direct improvement of Euler technique is to weight the partial sums and write:
S′n =wnSn + wn+1Sn+1
wn + wn+1. (27)
In our specific situation, we need to evaluate integrals of the form:
S =
∫
∞
α
f(x)dx , (28)
where α is related to k0maxl(√ε`µ`). In order to transform this integral in a series, we apply
the approach of “integration then summation”. Thus, we define:
ui =
∫ xi
xi−1
f(x)dx , (29a)
S =∞∑
i=0
ui , (29b)
Sn =n∑
i=0
ui . (29c)
The break points xi have to be well chosen, and may for example be chosen based on the
asymptotic behavior of f . If we refer back to Sommerfeld integrals, we can take the asymptotic
expansion of the Bessel function:
Jν(kρρ) '√
2
πkρρcos(kρρ− ν
π
2− π
4) . (30)
Hence, the easiest/simplest choice of break points will be
xn = kρn = x0 + nπ
ρ, (31)

9
where x0 is the first break point greater than α. We will then approximate S by Sn as
Sn =
∫ xn
α
f(x)dx . (32)
The problem of Sommerfeld’s integrals is that the remainder
rn = S − Sn = −∫
∞
xn
f(x)dx (33)
decays slowly, so that we want to accelerate the series from which Sn is evaluated (see Eq. (29c)).
For Sommerfeld-type integrals, we write the generic form as:
I =
∫
∞
α
g(kρρ) f(kρ) dkρ , (34)
and the partial integral as
I(n) =
∫ xn
α
g(kρρ) f(kρ) dkρ . (35)
The remainder is therefore
I − I(n) =
∫
∞
xn
g(kρρ) f(kρ) dkρ . (36)
This integral can be expanded into an infinite series of inverse powers of ρ by integration by
part. For example, with g(kρρ) = eikρρ (which is a generic form for Sommerfeld integrals), we
can write:
I − I0(n) =i
ρeianρ
[
fn +i
ρf ′n + (
i
ρ)2f
′′
n + . . .
]
, (37)
where fn = f(xn), f′
n = f ′(xn), etc. Note that if the right-hand side term converges (and it
does in our case), the dominant term is O(ρ−1). Yet, if we now construct
I1(n) =fn+1I0(n) + fnI0(n+ 1)
fn + fn+1, (38)
it appears to be a better estimate of I since the error is in O(ρ−2).
If, in addition,
f(kρ) ∼ Ckαρ e−βkρ , (39)
we can approximate fn and fn+1 and write
I1(n) =I0(n) + η0I0(n+ 1)
1 + η0, (40)
where η0 = [n/(n+ 1)]α eβπ/ρ. At higher orders, a better approximation is given by:
I2(n) =I1(n) + η1I1(n+ 1)
1 + η1, (41)
where η1 = [(n− 1/2)/(n+ 1/2)]α−2 eβπ/ρ.
In practical applications, the parameters α and β may have to be adjusted for an optimum
convergence.
The technique presented briefly here is known as the “weighted average” method, and more
details can be found in the literature under this keyword.

Integral Equations in Electromagnetics
Massachusetts Institute of Technology
6.635 lecture notes
Most integral equations do not have a closed form solution. However, they can often be
discretized and solved on a digital computer.
Proof of the existence of the solution to an integral equation by discretization was first
presented by Fredholm in 1903.
In general, integral equations can be divided into two families:
1. When the unknown is in the integral only, the integral equation is called of the first kind.
2. When the unknown is both inside and outside the integral, the integral equation is called
of the second kind.
For electromagnetic applications, we can have both scalar and vector integral equations.
1 Scalar integral equations
Let us consider the situation of Fig. 1: two regions are defined in space, region 2 bounded by
the closed surface S and region 1 being all the remaining space, bounded by S and S∞, in which
sources are located.
#1
#2
nJ
S
S∞
Figure 1: Definition of the geometry of the problem.
It is already known that we can write:
(∇2 + k21) Φ1(r) = J(r) , (1a)
(∇2 + k22) Φ2(r) = 0 , (1b)
1

2 Section 1. Scalar integral equations
and similarly for the Green’s functions
(∇2 + k21) g1(r, r′) = −δ(r − r′) in region 1, (2a)
(∇2 + k22) g2(r, r′) = −δ(r − r′) in region 2. (2b)
Upon performing (Eq. (1a)g1(r, r′)−Eq. (2b)Φ1(r, r
′)), we get:
[g1(r, r′)∇2Φ1(r)− Φ1(r)∇2g1(r, r
′)] = J(r)g1(r, r′) + δ(r − r′)Φ1(r) . (3)
Upon integrating Eq. (3) over the entire volume and using the identity ∇ · (g∇Φ−Φ∇g) =g∇2Φ− Φ∇2g, we get:
∫
V
dv ∇ · [g1(r, r′)Φ1(r)− Φ1(r)∇g1(r, r′)] =∫
V
dvJ(r) g(r, r′) + Φ1(r′) . (4)
By Gauss theorem, we reduce the left-hand side integral to a surface integral. Also∫
V
dvJ(r)g1(r, r′) = −Φinc(r
′) . (5)
We therefore obtain
−∫
S+S∞
ds n · [g1(r, r′)∇Φ1(r)− Φ1(r)∇g1(r, r′)] = −Φinc(r) + Φ1(r′) , r′ ∈ V . (6)
By invoking the radiation condition, the integral over S∞ vanishes, leaving (and exchanging
r and r′ so that primed coordinates correspond to sources and unprimed ones to observation):
Φ1(r) = Φinc(r)−∫
S
ds′ n · [g1(r, r′)∇′Φ1(r′)− Φ1(r
′)∇′g1(r, r′)] r ∈ V1 . (7)
For r ∈ V2, the wave equation has no source and therefore the integration of the delta
function yields a zero value. Performing the same steps for this second case, we get the generic
relation:
Φinc(r)−∫
S
ds′ n · [g1(r, r′)∇′Φ1(r′)− Φ1(r
′)∇′g1(r, r′)] =
Φ1(r) r ∈ V1
0 r ∈ V2(8)
This is directly evocative of Huygens’ principle:
• For r ∈ V1: the total field Φ1(r) is the sum of the incident field plus the field due to the
surface currents on the surface S.
• For r ∈ V2: the surface source on S produces a field that exactly opposes Φinc, yielding
the extinction theorem.
Applying the same reasoning to region 2, we write (where there is no incident field):
∫
S
ds′ n · [g2(r, r′)∇′Φ2(r′)− Φ2(r
′)∇′g2(r, r′)] =
0 r ∈ V1
Φ2(r) r ∈ V2(9)

3
Note that the sign reversal is due to the definition of the normal vector n which has to point
outward from the surface. Here, since we use the same n as before, we have to take it as being
negative.
Eqs. (8) and (9) have four independent unknowns:
Φ1, Φ2 ; n · ∇Φ1, n · ∇Φ2 , (10)
which can be related by the boundary conditions. Here, g(r, r′) and n · ∇g(r, r′) are the kernel
of the integral equation.
2 Vector integral equation
For the sake of completeness, we shall write the vector wave equation as well, although we will
not use it here directly.
Considering the same situation as above, we know that the fields have to satisfy:
∇×∇× E1(r)− ω2ε1µ1E1(r) =iωµ1J(r) , (11a)
∇×∇× E2(r)− ω2ε2µ2E2(r) =0 , (11b)
and the Green’s functions:
∇×∇×G1(r, r′)− ω2ε1µ1G1(r, r
′) = Iδ(r − r′) , (12a)
∇×∇×G2(r, r′)− ω2ε2µ2G2(r, r
′) = Iδ(r − r′) . (12b)
By the same technique as before (∫
Vdv [Eq. (11a) ·G1(r, r
′)− Eq. (12a) · E1(r)]dv)
∫
V
dv
[
∇×∇× E1(r) ·G1(r, r′)− E1(r) ·∇×∇×G1(r, r
′)
]
= iωµ1
∫
V
dv J(r) ·G1(r, r′)− E1(r) .
(13)
The left-hand side can be transformed into a surface integral (left as exercise) and the right-hand
side written in terms of incident field, yielding:
E1(r′) = Einc(r
′)+
∫
S+S∞
ds n·
[∇×E1(r)]×G1(r, r′)+E1(r)×∇×G1(r, r
′)
, r′ ∈ V1 . (14)
By reciprocity of the Green’s functions, we can transform
n · [∇× E1(r)]×G1(r, r′) = n× [∇× E1(r)] ·G1(r, r
′)
= iωµ1G1(r, r′) · n× H1(r) . (15)
In addition, for an unbounded homogeneous medium (∇×G(r, r′) is reciprocal):
n · E1(r)×∇×G1(r, r′) = n× E1(r) · ∇ ×G1(r, r
′)
= −[∇×G1(r, r′)] · n× E1(r) . (16)

4 Section 3. Problem with the internal resonance
For Green’s functions that satisfy the radiation condition, Eq. (14) becomes:
E1(r′) = Einc(r
′) +
∫
S
ds n ·
iωµ1G1(r, r′) · n× H1(r)− [∇×G1(r, r
′)] · n× E1(r)
. (17)
We perform the same steps for the other region to eventually obtain (and again interchanging r
and r′):
Einc(r) +
∫
S
ds′
iωµ1G1(r, r′) · n× H1(r
′)− [∇′ ×G1(r, r′)] · n× E1(r
′)
=
E1(r) r ∈ V1
0 r ∈ V2
(18a)
−∫
S
ds′
iωµ2G2(r, r′) · n× H2(r
′)− [∇′ ×G2(r, r′)] · n× E2(r
′)
=
0 r ∈ V1
E2(r) r ∈ V2
(18b)
Together with the boundary conditions
n× H1(r) = n× H2(r) , (19a)
n× E1(r) = n× E2(r) , (19b)
this system can be solved for n× E1(r) and n× H1(r).
Note also that Eqs. (18) can be written in terms of electric and magnetic currents, and
magnetic Green’s functions:
Jeq(r′) = n× H1(r
′) ; −Meq(r′) = n× E1(r
′) , (20a)
so that for example:
Einc(r) +
∫
S
ds′
iωµ1Ge1(r, r′) · J(r′) +Gm1
(r, r′) · M(r′)
=
E1(r) r ∈ V1
0 r ∈ V2(21)
3 Problem with the internal resonance
A question arises: is the integral equation equivalent to Maxwell’s equations? Or asked differ-
ently, if we solve the integral equation and Maxwell’s equations, do we get the same solution?
The answer is actually “no”, that is they are not always equivalent to each-other. The
problem comes from spurious solutions at frequencies corresponding to the eigenfrequencies of
the cavity enclosed by the surface S. This problem is generally referred to as the “internal
resonance of the integral equation”.
However, this lack of complete equivalence between the physical problem and its defining
integral equation is rather minor and infrequent phenomenon, and is therefore often tolerated
in practice.

5
4 Scattering by a rough surface
Let us consider the 2D problem (for which we shall use a scalar integral equation) depicted in
Fig. 2.
PSfrag replacements
z
x
f(x) ε0
ε1
Figure 2: Rough surface S separating two media.
The integral equation in scalar form is given by:
Φinc(r) +
∫
S
ds′n · [Φ(r′)∇g(r, r′)− g(r, r′)∇Φ(r′)] =
Φ(r) r ∈ V0
0 r ∈ V1(22)
4.1 Dirichlet boundary conditions: EFIE
For a TE wave (E = Ey) and PEC surface, the boundary condition is
Φ(r) = 0 , for r ∈ S . (23)
The integral equation becomes, for r ∈ S , r′ ∈ S:
Φinc(r)−∫
S
ds′ g(r, r′) n · ∇Φ(r′) =
Φ(r)
0(24)
This equation, in which Φ represent the electric field, is referred to as the electric field integral
equation (EFIE).
Note that as r gets closer to the surface, Φ(r) → 0 (from the boundary condition) so that
we do not need to distinguish between approaching the surface from one side or the other. In
fact, we can unify the equations and write:
Φinc(r)−∫
S
ds′ g(r, r′) n · ∇Φ(r′) = 0 , r ∈ S , r′ ∈ S . (25)
In addition, g(r, r′) has an integrable singularity as r → r′. Let us consider the surface
depicted in Fig. 2, with z = f(x):
ds =√
dx2 + dz2 = dx
√
1 +
(
df
dx
)2
, (26)
such that the integral equation becomes:
Φinc(r) =
∫
∆x
dx′
√
1 +
(
df
dx
)2
g(x, f(x), x′, f(x′)) (n · ∇Φ(r′)) , at z′ = f(x′) , (27)

6 4.2 Neumann boundary conditions: MFIE
where we can limit ∆x to [−L/2, L/2].By letting
√
1 +
(
df
dx
)2
(n · ∇Φ(r′))|z′=f(x′) = U(x′) , (28a)
Φinc(x, f(x)) = b(x) , (28b)
K(x, x′) = g(x, f(x), x′, f(x′)) , (28c)
we can rewrite the integral equation as
∫ L/2
−L/2dx′K(x, x′)U(x′) = b(x) , (29)
which has to be solved numerically.
Before doing this, we shall write the integral equation with Neumann boundary conditions.
4.2 Neumann boundary conditions: MFIE
This corresponds to a TM case with H = Hy with a PEC surface. In this case, the boundary
condition is
n · ∇Φ(r) = 0 , (30)
and the integral equation becomes
Φinc(r) +
∫
S
ds′ Φ(r) n · ∇g(r, r′) =
Φ(r) r ∈ V0
0 r ∈ V1(31)
In this case, it makes a difference if we approach the surface from the top or from the bottom.
In fact
Φinc(r+) +
∫
S
ds′Φ(r′) n · ∇g(r+, r′) = Φ(r+) , (32a)
Φinc(r−) +
∫
S
ds′Φ(r′) n · ∇g(r−, r′) = 0 . (32b)
These two equations seems inconsistent with one another. We shall show that in fact, they
are actually consistent with each-other, due to the singularity of the Green’s functions.
We shall examine what happens when we let r approach the surface. Fig. 3 is an illustration
of the situation at the immediate vicinity of the surface. The integral part of the equation can
be written as:∫
S
ds′Φ(r′) n · ∇g(r, r′) = PV
∫
S
ds′Φ(r′) n · ∇g(r, r′) +∫
pieceds′Φ(r′) n · ∇g(r, r′) , (33)
where PV denotes the principal value and ‘piece’ refers to the integration over the local domain
shown in Fig. 3. For this integral, we use the local coordinates:
ds′ = dX ′ , n = Z ′ , etc (34)

7
PSfrag replacements
−a
a
r
r = (0, Z)
X ′
Z ′
Figure 3: Zoom on the rough surface.
The integral becomes:
∫
pieceds′Φ(r′) n · ∇g(r, r′) = lim
a→0lim|Z|→0
Φ(r)
∫ a
−a
dX ′∂
∂Z ′g(r, r′) . (35)
Over the small piece, we have:
|r − r′| =√
X ′2 + (Z − Z ′)2 , (36a)
g =i
4H
(1)0 (|r − r′|) → − 1
2πln(
|r − r′|2
) , (36b)(
∂g
∂Z ′
)
Z′=0
=Z
2π(X ′2 + Z2). (36c)
Thus, the integral becomes
∫
piece= lim
a→0lim|Z|→0
Φ(r)
∫ a
−a
dX ′1
2π
Z
X ′2 + Z2
= lima→0
lim|Z|→0
Φ(r)
2π
[
tan−1X ′
Z
]a
−a
=
12 Φ(r) for Z > 0
−12 Φ(r) for Z < 0
(37)
The two parts of the integral then become:
Φinc(r) + PV
∫
S
ds′Φ(r′) n · ∇g(r, r′) + 1
2Φ(r) = Φ(r) , (38a)
Φinc(r) + PV
∫
S
ds′Φ(r′) n · ∇g(r, r′)− 1
2Φ(r) = 0 , (38b)
(38c)
which is cast into one equation:
Φinc(r) + PV
∫
S
ds′Φ(r′) n · ∇g(r, r′) = 1
2Φ(r) . (39)
Eq. (39) is called the magnetic field integral equation (since Φ represents the magnetic field)
and is an integral equation of the second kind.

8 Section 5. Solving the EFIE
In the same way as before, we can define the kernel as
K(x, x′) =
√
1 +
(
df
dx
)2
n · ∇g(r, r′)|z=f(x),z′=f(x′) , (40)
and write the MFIE as
Φinc(r) + PV
∫
∞
−∞
dx′Φ(x′)K(x, x′) =1
2Φ(x) . (41)
5 Solving the EFIE
Upon using the notation introduced in Section 4.1, the problem is reduced to solving the following
integral equation:∫ L/2
−L/2dx′K(x, x′)U(x′) = b(x) . (42)
Let us subdivide the integration domain into N small elements, each of length ∆ = L/N ,
and centered at xm (m ∈ [1, N ]). Thus, constraining the observation at these discrete locations,
the integral equation becomes
∫ L/2
−L/2dx′K(xm, x
′)U(x′) = b(xm) . (43)
Next, if we suppose that U(x) is constant in each interval, we replace the integral by a sum over
all segments, excluding the singular term:
∆x∑
n=1n6=m
K(xm, xn)U(xn) + U(xm)
∫
m
dx′K(xm, x′) = b(xm) . (44)
Note that we have to single out the singularity, i.e. the mth interval because K(xm, x′) is
singular at x′ = xm. This part is known as the self-patch contribution.
For a 2D problem, we have:
K(xm, x′) =
i
4H
(1)0 (k
√
(xm − x′)2 + (f(xm)− f(x′))2) . (45)
Upon approximating f(x′)− f(xm) ' f ′(xm)(x′ − xm), we write:
K(xm, x′) =
i
4H
(1)0 (k|x′ − xm|
√
1 + f ′(xm)2) . (46)
For small argument: H(1)0 (α) ≈ 1 + i 2
πln(αγ/2) where γ is the Euler constant (γ ' 1.78).
Therefore:
K(xm, x′) =
i
4
[
1 + i1
πln
(
γ
2k(x′ − xm)
√
1 + f ′2(xm)
)]
. (47)

9
Therefore, the integral becomes:
∫
m
dx′K(xm, x′) = 2
∫ xm+∆x/2
xm
dx′K(xm, x′) = 2
∫ ∆x/2
0dx′K(xm, x
′ + xm)
' i
2
∫ ∆x/2
0dx′[
1 + i1
πln
(
γ
2kx′√
1 + f ′2(xm)
)]
=i∆x
4
1 + i2
πln
(
γk
4e∆x√
1 + f ′2(xm)
)
, (48)
where ln(e) = 1.
We can therefore cast the integral equation into a matrix equation of the form:
N∑
n=1
AmnUn = bm , (49)
where
Un = U(xn) is the unknown, (50a)
bm = b(xm) , (50b)
Amn =
∆x K(xm, xn) for m 6= n
i∆x4
1 + i 2πln
(
γk4e∆x
√
1 + f ′2(xm)
)
for m = n(50c)
The system can now easily be solved numerically.

The Method of Moments in Electromagnetics
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
In the previous lecture, we wrote the EFIE for an incident TE plane wave on a PEC surface.
The solution was then obtained by some types of “intuitive” arguments, such as dividing the
integration domain into small elements and supposing that the unknown does not vary too much
over each elementary cell.
We shall now see more rigorously what we actually did, and show that it was in fact a simple
version of the Method of Moments.
R. F. Harrington was the first to use the method of moments (MoM) in electromagnetics
and his book remains a fundamental reference (and very easy to read!):
R. F. Harrington, “Field Computation by Moment Method” (is now available from IEEE Press).
2 PEC surface with TE incident wave: EFIE
The situation we studied last time is depicted in Fig. 1. The integral equation (EFIE) we
z
x
f(x) ε0
ε1
Figure 1: Rough surface S separating two media.
eventually obtained was:
Φinc(r) =
∫ L/2
−L/2dx′
√
1 +
(
df
dx
)2
g(x, f(x), x′, f(x′)) [n · ∇Φ(r′)]|z′=f(x′) , (1)
which we rewrote as
b(x) =
∫ L/2
−L/2dx′K(x, x′)U(x′) , (2)
1

2 Section 2. PEC surface with TE incident wave: EFIE
where√
1 +
(
df
dx
)2
[n · ∇Φ(r′)]|z′=f(x′) = U(x′) , (3a)
Φinc(x, f(x)) = b(x) , (3b)
K(x, x′) = g(x, f(x), x′, f(x′)) , (3c)
where U(x′) is the unknown we are solving for.
The important step we did from this integral, although it probably appeared straightforward,
was to say that x can only take discrete values on the surface, thus defining N intervals of length
∆x:
x ∈ xi , i = 1, . . . , N, (4)
The assumptions were therefore:
1. x ∈ xi , i = 1, . . . , N.
2. U(x′) is constant on each interval.
which eventually yielded the following system of equations (supposing that the problem related
to the singularity of the Green’s function has been accounted for):
N∑
n=1
Amn Un = bm . (5)
This is a matrix equation with the two indices m and n corresponding to:
m: observation point → unprimed coordinates.
n: source point → primed coordinates.
Physical interpretation:
• element (m,n) represents the effect of cell n on cell m.
• element (m,m) represents the self-term.
Mathematically:
The steps we had to perform to from Eq. (2) to Eq. (5) are
1. Write the unknown as
U(x′) =∑
n
Unδ(xn)∆x , (6)
stating that now the unknowns become Un which are the amplitudes of the function.
The integral equation becomes:
∫ L/2
−L/2dx′K(x, x′)U(x′) = ∆x
∑
n
UnK(x, xn) = b(x) . (7)

3
2. Dot-multiply both sides by δ(xm):
∆x∑
n
UnK(xm, xn) = b(xm). (8)
These two steps are at the basis of the method of moments:
1. First step can actually be decomposed into two steps:
(a) Mesh the structure (i.e. choose the intervals over which Un will be defined).
(b) Expand the unknown U(x) into basis functions.
2. The second steps concerns the observation: dot-multiply both sides of the equation by a
test function (or weighting function).
In the previous example:
• basis functions: pulse basis function.
• testing functions: we point-patch the integral equation at x = xm (the method is therefore
called point matching).
This is a very simple, yet very widely used version of the method of moments.
3 General considerations on MoM
Let us consider the inhomogeneous equation:
L(f) = g , (9)
where L is a linear operator, g is known, and f is to be determined. We shall now perform the
two essential steps we have highlighted above.
1. Let f be expanded in a series of functions:
f =∑
n
αn fn , (10)
where αn are constant. The set fn is called expansion function, or basis functions.
Note that for an exact solution, the summation should be taken to ∞, but has to be
truncated in practice.
2. It is assumed that a suitable inner product has been defined for the problem. Now, we
define a set of weighting functions, or testing functions, w1 , w2 , . . . , wN in the range of
L, and take the inner product of the previous equation with wm:
∑
n
αn < wm,Lfn >=< wm, g > . (11)

4 Section 4. A simple example for electrostatic
The system can now be written in matrix form as:
[Amn] [αn] = [gm] , (12)
where
[Amn] =
< w1,Lf1 > < w1,Lf2 > . . .
< w2,Lf1 > < w2,Lf2 > . . ....
.... . .
, [αn] =
α1
α2...
, [gm] =
< w1, g >
< w2, g >...
. (13)
If the matrix [Amn] is not singular, the unknowns αn are simply given by:
[αn] = [Amn]−1 [gm] , (14)
and the original function f can be reconstructed using Eq. (10). We can now generalize the
following definitions:
• The basis functions used previously are defined as:
Pulse basis functions: fn =
1 if x belongs to the interval n
0 otherwise(15)
• The testing (or weighting functions):
Point matching = taking Dirac δ functions as testing functions.
4 A simple example for electrostatic
The example is taken from the reference mentioned at the beginning of this document.
Let us consider a square plate of side 2a lying on the z = 0 plane with its center at the
origin (see Fig. 2. Let σ(x, y) represent the surface density on the plate, assumed to have zero
thickness. The electrostatic potential Φ at any point in space is given by
PSfrag replacements
2a
2a
2b
2b
x
y
z
Figure 2: Discretized square plate.

5
Φ(x, y, z) =
∫ a
−a
dx′∫ a
−a
dy′ σ(x′, y′) g(r, r′) , (16a)
g(r, r′) =1
4πεR, (16b)
R =√
(x− x′)2 + (y − y′)2 + z2 . (16c)
The boundary condition is Φ = V = constant on the plate. The integral equation for the
problem is therefore
V =
∫ a
−a
dx′∫ a
−a
dy′1
4πε
σ(x′, y′)√
(x− x′)2 + (y − y′)2 + z2, (17)
where the unknown to determine is σ(x′, y′). Let us perform the three steps mentioned before:
1. Mesh the structure: divide the plate into N squares of size 2b (see Fig. 2).
2. Basis functions: let us choose
σ(x′, y′) 'N∑
n=1
αn fn(x′, y′) with fn(x
′, y′) =
1 on ∆Sn
0 on ∆Sm, m 6= n.(18)
3. Test functions: we choose to satisfy the integral equation at the mid-point (xm, ym) of
each ∆Sm:
wm = δ(x− xm)δ(y − ym). (19)
With these three steps, we construct the matrix as (z = 0):
[Amn] =
∫
∆xn
dx′∫
∆yn
dy′1
4πε
1√
(xm − x′)2 + (ym − y′)2. (20)
It is obvious to see that this integral is singular at (xm, ym) ∈ ∆Sm. In this simple case
fortunately, we can perform the integration analytically (this is not always the case), and write:
Ann =
∫ b
−b
dx′∫ b
−b
dy′1
4πε
1√
x′2 + y′2=
2b
πεln(1 +
√2) , (21a)
Amn ' ∆Sn4πεRmn
=b2
πε√
(xm − x′)2 + (ym − y′)2, m 6= n . (21b)
To rewrite this with the language of linear space:
f(x, y) = σ(x, y) , (22a)
g(x, y) = V on the plate (the discretization gives: gm =
V
V...
) (22b)
L(f) =∫ a
−a
dx′∫ a
−a
dy′1
4πε
f(x′, y′)√
(x− x′)2 + (y − y′)2. (22c)
Note: if we add another plate under the existing one, at z = −2d, with a potential −V , we
build a new problem that can be analyzed in two ways:

6 Section 5. Vectorial MoM
1. By meshing both plates (i.e. meshing everything, which is of course always possible). This
will yield matrix twice as big as the previous one, to solve for twice as many unknowns.
2. By using the image theory, and saying that the new problem is equivalent to the one of a
unique plate on top of a ground plane at z = −d. In that case, we only have to change
the Green’s function to take the ground plane into account, and we keep the same number
of unknowns as in the initial problem. When possible, this solution is better because
computationally less expensive (analytically more expensive).
Basically, a general trend is to have a Green’s function that represents as much as possible
the environment and to mesh only those parts that are external to the environment. This is in
fact the reason why people are looking for Green’s functions in layered media, periodic media,
etc.
5 Vectorial MoM
We can of course apply the MoM to the vectorial case, like for example the equation:
E(r) = iωµ
∫
S
ds′ Ge(r, r′) · J(r′) . (23)
The general expansion of the current will be:
J(r′) =∑
n
αnfn(r′) , (24)
yielding
E(r) = iωµ∑
n
αn
∫
Sn
ds′ Ge(r, r′) · fn(r′) . (25)
The third step is to dot-multiply the equation with a testing function hm and integrate over
the cell surface (i.e. perform the inner product):∫
Sm
E(r) · hm(r) = iωµ∑
n
αn
∫
Sn
ds′∫
Sm
ds hm(r) ·Ge(r, r′) · fn(r′) . (26)
The double double-integral on the right-hand side of this equation is known as the
“impedance term” since we can cast this system of equation into a matrix representation as:
[Em] = [Zmn] [αn] . (27)
6 Other basis and testing functions
The advantage of the MoM over purely numerical methods is that there is still a large part that
remains analytic (like the Green’s functions for example). Yet, it remains a numerical method
based on a matrix inversion technique and therefore, convergence issues need to be examined.
The convergence of the MoM is closely related to the choice of basis functions and, although
to a lesser extend, to the choice of testing functions. There are essentially two families of basis
functions:

7
1. Entire domain basis functions: using these functions to expand the unknowns is analogous
to a Fourier expansion or to a modal expansion. These types of functions yield a good
convergence of the method but are not versatile since the geometry need be regular in order
to have the modes defined. Note that in this case there is no use to mesh the geometry.
2. Sub-domain basis functions: they rely on a proper meshing of the geometry, which can be
rectangular, triangular, etc. The choice of basis functions is here very wide, from Dirac δ
(like for the weighting functions shown in this document), pulses (basis functions shown
in this document), piecewise linear, etc.
Finally, we can mention that point matching, which is easy to grasp and straightforward to
implement, may not yield an optimal convergence. In most of the applications, the Galerkin
technique is better, which consists in choosing the same testing functions as the basis functions.
This applies to both sub-domain and entire domain functions.

Time Domain Method of Moments
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
The Method of Moments (MoM) introduced in the previous lecture is widely used for solving
integral equations in the frequency domain. Yet, some attempts have been made recently at the
use of the MoM in the time domain. We shall briefly expose this approach here.
2 Time domain equations
The first step is of course to write Maxwell’s equation and all other relations (constitutive
relations and continuity) in time domain:
∇× E(r, t) = − ∂
∂tB(r, t)− M(r, t) , ∇× H(r, t) =
∂
∂tD(r, t) + J(r, t) , (1a)
∇ · B(r, t) = m(r, t) , ∇ · D(r, t) = ρ(r, t) , (1b)
D(r, t) = εE(r, t) , B(r, t) = µH(r, t) , (1c)
∇ · J(r, t) + ∂
∂tρ(r, t) = 0 , ∇ · M(r, t) +
∂
∂tm(r, t) = 0 . (1d)
For the time-domain MoM, it is easier to work with the potentials, and make use of the
well-known “retarded potentials” theory. In view of doing this, we write the definition:
H(r, t) =1
µ0∇× A(r, t) (2a)
E(r, t) = −∇φ(r, t)− ∂
∂tA(r, t) . (2b)
Both the vector potential A and the scalar potential φ satisfy the wave equation which, in
time-domain domain, writes:
∇2A(r, t)− ε0µ0∂2
∂t2A(r, t) = −µ0J(r, t) , (3a)
∇2φ(r, t)− ε0µ0∂2
∂t2φ(r, t) = −ρ(r, t)
ε0. (3b)
These potentials are linked by the time-domain Lorentz gauge:
∇ · A(r, t) + ε0µ0∂
∂tφ(r, t) = 0 . (4)
1

2 Section 2. Time domain equations
We can defined also a time-domain Green’s function which satisfies the time-domain scalar
equation:
(∇2 − 1
c2∂2
∂t2)g(r, r′, t, t′) = −δ(r − r′) δ(t− t′) , (5)
which solution is (in free-space):
g(r, r′, t, t′) =
14π|r−r′
|δ(t− t′ − |r−r′
|
c) t > t′,
0 t < t′.(6)
From this, the solution to the wave equation for A and φ can be written as:
A(r, t) =µ0
∫
V
dv′∫
∞
−∞
dt′J(r′, t′) g(r, r′, t, t′) = µ0
∫
V
dv′J(r′, t−R/c)
4πR, (7a)
φ(r, t) =
∫
V
dv′ρ(r, t−R/c)
4πε0R, (7b)
where R = |r − r′|. These wave equations are known as the time retarded potentials, and
essentially say that the potential (either A or φ) can be calculated at a given point in space r
and given time t from all previous times.
From these equations, we can calculate the space-time electromagnetic fields:
H(r, t) =1
4π
∫
dv′ ∇× J(r′, τ)
R, τ = t−R/c , (8a)
E(r, t) = − 1
4πε0
∫
V
dv′ ∇ρ(r, τ)
R− µ0
4π
∫
dv′∂
∂t
J(r′, τ)
R. (8b)
Let us continue with the electric field first:
E(r, t) = − 1
4πε0
∫
V
dv′[
1
R∇ρ(r′, τ) + ρ(r′, τ)∇ 1
R
]
−µ0
4π
∫
V
dv′1
R
∂
∂tJ(r′, τ) . (9)
At this point, we need to use the following relations:
∇R =R
R, (10a)
∇ 1
R= − R
R3, (10b)
∇ρ(r′, τ) = ∂
∂τρ(r′, τ)∇τ = −1
c∇R ∂
∂τρ(r′, τ) = −1
c
R
R
∂
∂τρ(r, τ) . (10c)
We can therefore continue with the electric field as:
E(r, t) =1
4πε0
∫
dv′[
1
c
R
R2
∂
∂τρ(r′, τ) +
R
R3ρ(r′, τ)
]
− µ0
4π
∫
dv′1
R
∂
∂τJ(r′, τ)
=1
4πε0
∫
dv′[
1
c
∂
∂τρ(r′, τ) +
1
Rρ(r′, τ)
]
R
R2− µ0
4π
∫
dv′1
R
∂
∂τJ(r′, τ) . (11)

3
We can perform the same type of calculations for the magnetic field using the relation
∇× J(r′, τ) = −1
c
R
R× ∂
∂τJ(r′, τ) . (12)
We get:
H(r, t) =1
4π
∫
dv′[
−1
c
R
R2× ∂
∂τJ(r′, τ)− R
R3× J(r′, τ)
]
. (13)
Upon gathering the expressions for the electric and magnetic field, we eventually get:
E(r, t) =1
4π
∫
dv′[
1
c
∂
∂τρ(r′, τ) +
1
Rρ(r′, τ)
]
R
ε0R2− µ0
R
∂
∂τJ(r′, τ)
(14a)
H(r, t) =1
4π
∫
dv′[
1
c
∂
∂τJ(r′, τ) +
1
RJ(r′, τ)
]
× R
R2. (14b)
Upon using the boundary conditions for the electric and magnetic field, we construct the
integral equations in a standard way:
• EFIE: n× (Ei + Escat) = 0 on PEC surface
⇒ n× Ei(r, t) +1
4πn×
∫
ds′ [. . .] (15)
• MFIE: n× (H i + Hscat) = Js.
As we have seen before (in a previous class), this integral equation is expressed in terms
of the principal value of the integral with a 1/2 additional factor. Thus:
1
2J(r, t) = n× H i(r, t) +
1
4πn× PV
∫
ds′ [. . .] (16)
For the sake of comparison, we can write the MFIE in the frequency domain and in the time
domain:
J(r) = 2n× H i(r) + 2n× PV
∫
ds′ J(r′)×∇′g(r, r′) r ∈ S , (17a)
J(r, t) = 2n× H i(r) +1
2πn× PV
∫
ds′[
1
c
∂
∂τJ(r′, τ) +
1
RJ(r′, τ)
]
× R
R2. (17b)
Note that in the principal value, we essentially exclude the part for which R = 0. Since
τ = t − R/c and R 6= 0, we always have that τ < t. The time domain equations therefore
state that the current at location r and time t is equal to a known term 2n × H i(r, t) plus a
term (integral) known from the past history of J . This is the basis for solving the time domain
integral equation by iterative methods, the most well-known one being the marching-on-in-time.

4 Section 3. The marching-on-in-time technique
3 The marching-on-in-time technique
3.1 General equations
The integral equation can often be cast in the following form:
J(r, t) = J i(r, t) +
∫
S
dv′∫ τ
0dt′ K(r, r′, t− t′) · J(r′, t′) . (18) eq.10
Note that we have a time integral also as in Eq. (eq.1018), J(r′, t′) has not yet been set to satisfy
any causality condition. Hence, we must then impose J i(r, t) = 0 for t < 0, r ∈ S.
In order to apply the MoM, we discretize the current both in space and in time:
J(r′, t′) =
M∑
m′=1
N∑
n′=0
Jp(m′, n′) Ps(r
′ − rm′) Pt(t′ − tn′) , (19)
where P denotes the simple pulse function. In addition, we also apply point-matching, which
means that we take the following testing functions:
Wmn(rm, tn) = δ(r − rm) δ(t− n∆t) = δ(r − rm) δ(t− tn) , (20)
where we take ∆t = minRmm′/c, Rmm′ = |rm − r′m|. The method is best illustrated on the
following example.
3.2 Example
Let us consider a 1D example governed by the following integral equation:
g(x, t) =
∫ x0
−x0
K(x, x′) f(x′, τ)dx′ , x ∈ [−x0, x0], τ = τ(x, x′, t) = t− |x− x′|c
. (21)
Let us chose the following expansion for f :
f(x′, τ) 'N∑
i′=1
J∑
j′=1
ai′j′Pi′j′(x′, τ) , (22)
where the pulse basis functions are defined as
Pi′j′ =
1 for x′ ∈ [xi′ − dx
2 , xi′ +dx
2 ] and t ∈ [tj′ − dt
2 , tj′ + dt
2 ]
0 elsewhere.(23)
Note that we use the definitions: xi′ = i′dx, tj′ = j′dt, and dx = cdt. In order to apply point
matching, we take the following testing functions:
wij(x, t) = δ(x− xi) δ(t− tj) . (24)

5
Upon expanding and testing, we get:
g(xi, tj) = gij =
∫ x0
−x0
K(xi, x′)
N∑
i′=1
J∑
j′=1
ai′j′Pi′j′(x′, τ)δ(t− tj)
=N∑
i′=1
∫ (i′+ 1
2)dx
(i′− 1
2)dx
dx′J∑
j′=1
ai′j′Pi′j′(x′, τ)K(idx, x′)δ(t− tj) . (25)
Coming back to the definition of τ , we write (with the test and the expansion):
τ = tj −|xi − xi′ |
c= jdt − |i− i′|dx
c= (j − |i− i′|)dt , (26)
such that the coefficient ai′j′ becomes ai′,j−|i−i′|. The integral equation becomes:
gij =N∑
i′=1
ai′,j−|i−i′|
∫ (i′+ 1
2)dx
(i′− 1
2)dx
dx′K(idx, x′) . (27)
We can define the term
Zii′ =
∫ (i′+ 1
2)dx
(i′− 1
2)dx
dx′K(idx, x′) (28)
and rewrite the previous system as
gij =N∑
i′=1
Zii′ ai′,j−|i−i′|
= Zii aij + Zi,i−1 ai−1,j−1 + Zi,i−2 ai−2,j−2 + . . .+ Zi1 a1,j−i+1
+ Zi,i+1 ai+1,j−1 + Zi,i+2 ai+2,j−2 + . . .+ Z1,N aN,j−N+i . (29)
In this equation, only the first term involves time step j, all the others terms being at j− 1,
j − 2, . . . Therefore, we can solve for aij :
aij =1
Zii
[
gij −N∑
i′=1i′ 6=i
Zii′ ai′,j−|i−i′|
]
. (30)
The value of all aik are known for k < j, so that aij is completely specified in closed form by
those and the present value of gij . This process is known as a 1D march-on-in-time approach.
Time-domain MoM is nowadays in its early stage and, although it has been successfully
applied to various simple situations, still suffers from numerical instabilities. More work is in
progress...

Study of EM waves in Periodic Structures
with addenda: “Study of EM waves in Periodic Structures (mathematical details)”
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
We will study here the distribution of electromagnetic fields in dielectric periodic media. The
main difference with the previous topic comes from the word “dielectric”. Obviously, even a 2D
periodic dielectric medium cannot be studied with the Green’s functions presented in a previous
lecture, since the Green’s function was for periodic metallic structures.
In this topic, we will study the EM fields in media where:
• The material is macroscopic and isotropic.
• Since the material is constituted of real dielectric, we suppose we work in a small enough
frequency band such that we can ignore the frequency dispersive behavior of ε.
• The dielectric are lossless, so that ε is purely real.
2 Wave equations
2.1 Wave equations for H
Starting from Maxwell’s equations and using a permittivity ε = ε(r), it is straightforward to
show that we can write the following equations:
∇×[
1
ε(r)∇× H(r)
]
=
(
ω
c
)2
H(r) , (1a)
∇ · H(r) = 0 . (1b)
In this approach, the strategy is therefore:
1. Find the modes of H(r).
2. Find those of E(r) by solving Maxwell’s equations.
1

2 2.2 Wave equations for E
Note that we can rewrite Eq. (1a) as an eigenvalue problem:
Θ H(r) =
(
ω
c
)2
H(r) , (2)
where
Θ = ∇×[
1
ε(r)∇×
]
. (3)
Upon solving, we get the eigenvectors which correspond to the field patterns of the harmonic
modes, and the eigenvalues which are proportional to the squared frequencies of these modes.
Note that Θ is a linear operator and that it is Hermitian. The demonstration of the last
property is straightforward:
Define a scalar product < F , G >=∫
dr F ?(r) · G(r) and show that (by
integration by part for example): < F ,ΘG >=< ΘF , G >, which is the
definition of a Hermitian operator. The consequence of this property is of
course that Θ has real eigenvalues.
2.2 Wave equations for E
Another approach to get the fields would be of course to write the wave equation for E instead
of for H:
∇×∇× E(r) =
(
ω
c
)2
ε(r)E(r) . (4)
However, this system cannot be cast in a simple eigenvalue problem. Although it can still
be solved for, it is far more complicated to get accurate results since the operator we would have
to define would not be Hermitian. For this reason, this approach is in general avoided.
2.3 Bloch states
In a periodic medium, we know that the fields can be written as:
Hk(r) = eik·ruk(r), uk(r + R) = uk(r) . (5)
Inserting into Eq. (2) yields:
(ik +∇)×[
1
ε(r)(ik +∇)× uk(r)
]
=
(
ω(k)
c
)2
uk(r) , (6)
so that the operator becomes:
Θ = (ik +∇)×[
1
ε(r)(ik +∇)×
]
(7)
Note that because uk(r + R) = uk(r), the eigenvalue problem can be restricted to a small
zone in space, which would necessarily imply a discrete spectrum of eigenvalues. Therefore, we
expect a set of discrete modes for each k.

3
3 Fundamentals of photonic crystals
We shall briefly explain some terminology here related essentially to solid state physics, but
which is of prime importance for the study of the structures we are dealing with here.
3.1 Direct lattice (some details are given in the “mathematical details” addenda)
A photonic crystal is a periodic structure (that we will take to be dielectric here) in 1D, 2D or
3D.
Any vector r′ in space can be written as
r′ = r + R , (8)
where R is the translational vector in space defined by
R = α1a1 + α2a2 + α3a3 , (9)
where α1,2,3 ∈ . . . ,−2,−1, 0, 1, 2, 3, . . . and a1, a2 and a3 are the lattice vectors.
From the lattice, we can construct the Wigner-Seitz cell as shown in Fig. 1.
Figure 1: Wigner-Seitz cell for an arbitrary position of points: the cell is constructed
by joining the center element to its closest neighbors and drawing perpendicular lines
from to the center of these segments. The polygon thus created is the smallest repeat-
able cell of the periodic lattice, and is defined as the Wigner-Seitz cell.
Note that there exist only one type of lattice for a 1D photonic crystal, five distinct types
for 2D photonic crystals (rectangular, square, hexagonal or triangle, centered rectangular and
oblique), and fourteen for 3D photonic crystals.
3.2 Reciprocal lattice (some details are given in the “mathematical details” addenda)
We will use here the same notation as [Joannopoulos, Meade, and Winn, “Photonic Crystals”]
and write the reciprocal translational vector as G:
G = β1b1 + β2b2 + β3b3 , (10)
where β1,2,3 ∈ . . . ,−2,−1, 0, 1, 2, 3, . . . and b1, b2 and b3 are the lattice vectors in the spectral
domain.
For the sake of illustration, Tab. 1 gives the definition of vectors a and b for square and
triangular lattices.

4 3.3 Bloch-Floquet theorem
Square lattice a1 = ax b1 = 2π/a x
a2 = ay b2 = 2π/a y
Triangular lattice a1 = ax b1 = 2π/a (x−√3/3 y)
a2 = (x+√3y) b2 = 2π/a 2
√3/3 y
Table 1: Definition of a and b vectors for square and triangular (or hexagonal) lattice.
3.3 Bloch-Floquet theorem
From Bloch-Floquet theorem, we know that we can write the electric and magnetic fields as a
summation over reciprocal vectors G (see the “mathematical details” part of the notes). This
means that different k do not necessarily correspond to different modes and that therefore there
is a redundancy in the label k: we can therefore reduce the study to what is called the first
Brillouin zone (which is the Wigner-Seitz cell in the reciprocal lattice). Some examples of
Brillouin zones are given in Fig. 2 and Fig. 3.
PSfrag replacements
a1
a2
b1
b2
Figure 2: Direct square lattice and corresponding reciprocal lattice with highlighted
Brillouin zone.
PSfrag replacements
a1
a2
b1
b2
Figure 3: Direct triangular (or hexagonal) lattice and corresponding reciprocal lattice
with highlighted Brillouin zone.
4 Bragg-like diffraction
The standard Bragg diffraction is illustrated in Fig. 4. Here, we will derive another diffraction
condition, equivalent to Bragg, and shall see that the diffraction is entirely governed by the
reciprocal vector G.

5
PSfrag replacements
θ
θ
θ
a
Figure 4: Schematic representation of Bragg diffraction. Maximal diffraction occurs
at 2a sin θ = nλ where λ is the wavelength of the electromagnetic wave and n is an
integer.
Referring to Fig. 5, we can write the scattering amplitude in terms of the reflection coefficient
Γ at position r times a phase factor.
PSfrag replacements
r
kk′
O
Figure 5: Diffraction from an elementary volume of a periodic medium: k is the
wavevector of the incident wave whereas k′ is the wavevector of the diffracted wave.
Upon integrating over the whole volume, we get:
F (k, k′) =
∫
Γ(r)ei(k−k′)·rdv . (11)
Since the medium is periodic, we can write:
Γ(r + R) = Γ(r) =∑
G
Γ(G)eiG·r , (12)
such that
F (k, k′) =∑
G
∫
Γ(G)ei(G−∆k)·rdv , (13)

6 Section 4. Bragg-like diffraction
where ∆k = k′ − k. This amplitude is maximal when G−∆k = 2mπ or, when m = 0,
G = ∆k. (14)
This is an important relation which, again, is a condition for maximal diffraction. Upon ex-
panding back in terms of k and k′ and rising to the square, we write (noting that |k| = |k′| = k):
k2 = k2 + 2k · G+G2 , (15)
or (taking −k instead of k):
2k · G = G2 . (16)
As an exercise, it is interesting to show that this condition is equivalent to the standard
Bragg diffraction.
Upon dividing both terms of Eq. (16) by 4, we eventually write
k · (G2) = (
G
2)2 . (17)
This last equation has a nice geometrical interpretation shown in Fig. 6 which shows that
the vectors k that satisfy the maximum diffraction condition are actually those which lie on the
edge of the Brillouin zone.
PSfrag replacementsO C
D
GC/2
GD/2
Figure 6: Graphical representation of Eq. (17): each vector k (black vector) with its
tip on a dashed line (not all represented) will satisfy the equation. Graphically: all
those k have the same projection on the generating vector G/2 (red vector).
Therefore:
The edge of the Brillouin zone plus its center (G = 0) satisfy the maximum
diffraction condition.
This condition can also be rewritten in terms of group velocity: for those k which tip lie on
the edge of the Brillouin zone and k = 0, the component of the group velocity normal to the

7
Bragg diffraction planes tends to zero since the electromagnetic wave tends to be completely
reflected for these k:
vnormg (k ∈ BZ tip) =
(
∇kω(k)
)norm
(k ∈ BZ tip) → 0 . (18)
For the symmetry points, the diffracted wave is reflected in the direction of the incident wave so
that for these points, the total group velocity is zero. This can be directly seen on the dispersion
curves where, at the symmetry points of the crystal, the tangent to the curve is horizontal
(except possibly for those points corresponding to a zero frequency).
5 Mathematical details
Using all the principles shown before, we can construct the eigenvalue system for H and then
solve for E. The detailed mathematical manipulations are given in the annex document “Study
of EM waves in Periodic Structures (mathematical details)”.
Note that to build the system, we need to evaluate the Fourier coefficients of the permittivity
(or the inverse of the permittivity, κ). We shall show how to get these coefficients for the case
of infinite dielectric rods εa of circular cross-section organized in a square lattice, embedded in
a background of εb. We therefore place ourselves in a 2D situation where the G vector will be
written Gρ to denote that it does not depend on z (and similarly R will be noted Rρ).
As a reminder, we write the permittivity as:
ε(ρ) =∑
Gρ
ε(Gρ)eiGρ·ρ, ε(Gρ) =
1
Ω
∫
Ωε(ρ)e−iGρ·ρ , (19)
where Ω denotes the surface of the elementary cell.
The idea is to write the permittivity as
ε(ρ) = εb + (εa − εb)∑
Rρ
S(Rc − |ρ− Rρ|) , (20)
where again the subscript ρ in Rρ denotes a dependency on x and y only, Rc is the radius of the
dielectric rods and S denotes the step function. Merging these two equations, we get:
ε(Gρ) =1
Ω
∫
Ω
[
εb + (εa − εb)∑
Rρ
S(Rc − |ρ− Rρ|)]
e−iGρ·ρdρ ,
=1
Ω
∫
Ωεbe
−iGρ·ρdρ +1
Ω
∫
Ω(εa − εb)
∑
Rρ
S(Rc − |ρ− Rρ|)e−iGρ·ρdρ . (21)
Let us call the first integral I1(Gρ) and the second integral I2(Gρ), and evaluate them separately.
Evaluation of I1(ρ)

8 Section 5. Mathematical details
The first integral is easily evaluated as:
I1(Gρ) =
εb if Gρ = 0
0 elsewhere(22)
Evaluation of I2(ρ)
For the second integral, we can make the change of variable ρ′ = ρ− Rρ. Since ρ spans the
whole domain Ω and Rρ is the translational vector, ρ′ spans the whole space. We can therefore
replace the sum of integrals over Ω by a single integral over the whole 2D space. We write then:
If Gρ = 0:
I2(Gρ) =εa − εb
Ω
∫∫
dρ′S(Rc − |ρ− Rρ|) = (εa − εb)πR2
c
Ω= fr(εa − εb), (23)
where fr =πR2
c
Ω is the fractional volume.
If Gρ 6= 0:
I2(Gρ) =1
Ω(εa − εb)
∫∫
∞
−∞
dρ′ S(Rc − |ρ− Rρ|) e−iGρ·ρ′
=εa − εb
Ω
∫ Rc
0dρ′ρ′
∫ 2π
0dφe−iGρρ
′ cos(φ−θ)
=εa − εb
Ω2π
∫ Rc
0dρ′ρ′J0(ρ
′Gρ), (24)
where we have used the change of variable (now standard) x′ = ρ′ sinφ, y′ = ρ′ cosφ,
Gx = Gρ sin θ, Gy = Gρ cos θ, and the well-known identity for the Bessel function. Upon
using∫
xJ0(αx)dx = x/α J1(αx), we continue with
I2(Gρ) =2π
Ω(εa − εb)
[
ρ′
GρJ1(Gρρ
′)
]Rc
0
= fr(εa − εb)2J1(GρRc)
GρRc. (25)
This lead to the final result that:
ε(Gρ) =
εafr + εb(1− fr) if Gρ = 0
(εa − εb)fr2J1(GρRc)
GρRcelsewhere.
(26)
The reconstruction of the permittivity is then straightforward, and examples of two lattice
are given in Fig. 7.

9
(a) Side view.
(b) Top view.
Figure 7: Reconstruction of the permittivity for cylindrical rods in a square lattice
εa = 10, εb = 1, Rc/a = 0.2 (yielding a fractional volume fr = 12.5%).

10 Section 6. Dispersion curves
6 Dispersion curves
At this point, we have everything to build the eigensystem (34) given in the additional document
“Study of EM waves in periodic structures (mathematical details)”. Solving it gives a set of
eigenvalues that are directly related to the dispersion curve of the material. An example is given
in Fig. 8.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Fre
quen
cy ω
a/2
π c
Square lattice: Rc/a = 0.2 (f=12.5664%), εa=10, ε
b=1.
TETMPSfrag replacements
Γ X M Γ
Figure 8: Dispersion diagram for the photonic crystal of Fig. 7.

Study of EM waves in Periodic Structures (mathematical details)
Massachusetts Institute of Technology
6.635 partial lecture notes
1 Introduction: periodic media nomenclature
1. The space domain is defined by a basis,(a1, a2, a3), where any vector can be written as
r′ = r +R = r + α1a1 + α2a2 + α3a3 , (1)
where R is the translation vector, with α1, α2, α3 integers.
2. The spectral domain is defined by a basis, (b1, b2, b3), and similarly, the translational vector
is written as
G = β1b1 + β2b2 + β3b3 , (2)
where β1, β2, β3 are integers.
3. The two basis are linked since the functions (fields, permittivity) are periodic. For example,
if we write the permittivity:
Fourier expansion: ε(r) =∑
G
ε(G) eiG·r where ε(G) =1
Vcell
∫∫∫
dr3ε(r) e−iG·r . (3)
Periodicity: ε(r +R) =∑
G
ε(G) eiG·(r+R)
=∑
G
ε(G) eiG·r eiG·R = ε(r) (4)
so that eiG·R = 1 and
G ·R = 2mπ where m ∈ . . . ,−1, 0, 1, 2, . . . . (5)
We can see that condition (5) is immediately verified if we impose:
bj · ai = 2πδij . (6)
1

2 Section 1. Introduction: periodic media nomenclature
4. Bloch-Floquet theorem:
Since EM fields are periodic, we can write them as a propagating function times a function
with the same periodicity as the medium:
ξk(r) = eik·r ζ
k(r) where ζ
k(r +R) = ζ
k(r) , (7)
and where ξ can represent either the electric or magnetic fields, E or H.
Since ζ(r) is periodic, we can Fourier expand it:
ζk(r) =
∑
G
ζGeiG·r , (8)
so that we shall write:
Ek(r) =
∑
G
eGei(k+G)·r , (9a)
Hk(r) =
∑
G
hGei(k+G)·r . (9b)
5. Wave equation in source-free region:
From Maxwell’s equation, we can easily obtain the following wave equations in source-free
regions (with ε = ε(r)):
∇×∇×E(r) =
(
ω
c
)2
µrεr(r)E(r) , (10a)
∇×[
1
εr(r)∇×H(r)
]
=
(
ω
c
)2
µrH(r) , (10b)
To make these equations more symmetrical, we shall work with 1/εr(r) instead of εr(r)
directly, so that we define
κr(r) =1
εr(r)=∑
G
κr(G) eiG·r . (11)
The wave equations are rewritten as:
κr(r)∇×∇×E(r) =
(
ω
c
)2
µr E(r) , (12a)
∇×[
κr(r)∇×H(r)
]
=
(
ω
c
)2
µrH(r) . (12b)

3
2 Treatment of the E field
2.1 Method 1: direct expansion of the permittivity
We want to write Eq. (10a) with the decomposition of Eq. (9a). First, let us compute the first
curl (taking G′
as the variable for the expansion):
∇×Ek(r) =∑
G′
∇×[
eG
′ ei(k+G′
)·r]
= i∑
G′
(k +G′
)× eG
′ ei(k+G′
)·r . (13)
Taking the curl one more time gives
∇×∇× Ek(r) = −
∑
G′
(k +G′
)×[
(k +G′
)× eG
′
]
ei(k+G′
)·r . (14)
Upon using Eq. (3) but changing the index G into G′′
, we write
εr(r)E(r) =∑
G′
∑
G′′
εr(G′′
) eG
′ ei(k+G′
+G′′
)·r . (15)
By changing the variables G = G′
+G′′
:
εr(r)E(r) =∑
G
∑
G′
εr(G−G′
) eG
′ ei(k+G)·r . (16)
The wave equation (see Eq. (10a)) can therefore be rewritten as:
−∑
G′
(k +G′
)×[
(k +G′
)× eG
′
]
ei(k+G′
)·r =
(
ω
c
)2
µr∑
G
∑
G′
εr(G−G′
) eG
′ ei(k+G)·r . (17)
We can simplify by exp (ik · r) and multiply by exp (−iG′′ · r) to get:
−∑
G′
(k+G′
)×[
(k+G′
)×eG
′
]
ei(G′
−G′′
)·r =
(
ω
c
)2
µr∑
G
∑
G′
εr(G−G′
) eG
′ ei(G−G′′
)·r . (18)
If we integrate this equation over the entire space, we can pull all the terms out of the
integral, except ei(G′
−G′′
)·r on the left-hand side and. ei(G−G′′
)·r on the right-hand side. Yet,
we have
∫∫∫
V
dr3ei(G−G′′
)·r =1
(2π)3δ(G−G
′′
) , (19)
so that Eq. (18) becomes (upon substituting G′′
by G since these are dummy variables):
−(k +G)×[
(k +G)× eG
]
=
(
ω
c
)2
µr∑
G′
εr(G−G′
) eG
′ , ∀G . (20)

4 2.2 Method 2: expansion of the inverse of the permittivity
2.2 Method 2: expansion of the inverse of the permittivity
Instead of working with Eq. (10a), we can also use Eq. (12a), which would need the expansion
of Eq. (11).
Applying the same method (and transforming the index of Eq. (11) from G to G′′
), we get:
−∑
G′′
∑
G′
κr(G′′
)(k+G′
)×[
(k+G′
)× eG
′
]
ei(k+G′
+G′′
)·r =
(
ω
c
)2
µr∑
G′
eG
′ei(k+G′
)·r . (21)
which, upon substituting G = G′
+ G′′
, simplifying by exp (ik · r), multiplying by
exp (−iG′′ · r), integrating over the whole space, using Eq. (19) and finally substituting G′′
by G, becomes:
−∑
G′
κr(G−G′
)(k +G′
)×[
(k +G′
)× eG
′
]
=
(
ω
c
)2
µr eG, ∀G . (22)
3 Treatment of the H field
The H field is treated in an exactly similar way to eventually obtain very similar equations.
However, these equations can still be pushed further by using the fact that ∇ ·Hk(r) = 0.
Upon using this equality, we see from Eq. (9b) that (using G′
for the expansion of the field):
(k +G′
) · hG
′ = 0 . (23)
We can therefore define three vectors (e1, e2, e3) such that
k +G′
= |k +G′| e3 , (24a)
e1 · e3 = e2 · e3 = 0 , (24b)
and (e1, e2, e3) for an orthonormal tryad. In that case, we can decompose
hG
′ = h1G
′ e1 + h2G
′ e2 =∑
λ=1,2
hλG′ eλ . (25)
We need now to introduce this expression into Eq. (12b). First, we compute
∇×Hk(r) = i
∑
G′
∑
λ
hλG′
[
(k +G′
)× eλ
]
ei(k+G′
)·r , (26)
so that
κr(r)∇×Hk(r) = i
∑
G′′
∑
G′
∑
λ
hλG′ κr(G
′′
)
[
(k +G′
)× eλ
]
ei(k+G′
+G′′
)·r
= i∑
G
∑
G′
∑
λ
hλG′ κr(G−G
′
)
[
(k +G′
)× eλ
]
ei(k+G)·r . (27)
Taking the next curl, we write:

5
∇×[
κr(r)∇×Hk(r)
]
= −∑
G
∑
G′
∑
λ
hλG′ κr(G−G′)
[
(k+G)×[(k+G′
)×eλ]]
ei(k+G)·r , (28)
so that the wave equation (see Eq. (12b)) becomes:
−∑
G
∑
G′
∑
λ
hλG′ κr(G−G′)
[
(k+G)×[(k+G′
)×eλ]]
ei(k+G)·r =
(
ω
c
)2
µr∑
G′
∑
λ
hλG′ ei(k+G
′
)·reλ .
(29)
Always by the same token (multiplying by the proper functions and integrating over whole
space), we write:
−∑
G′
∑
λ
hλG′ κr(G−G
′
)
[
(k+G)× [(k+G′
)× eλ]
]
=
(
ω
c
)2
µr∑
λ′′
hλ′′
Geλ′′ ∀G . (30)
We can further simplify this expression by dot-multiplying the equation by eλ′ and noting
that (using C · (A×B) = B · (C ×A))
[
(k +G)× [(k +G′
)× eλ]
]
· eλ′ = −[
(k +G′
)× eλ
]
·[
(k +G)× eλ′
]
(31)
Therefore, dot-multiplying Eq. (30) by eλ′ , we get the final result:
∑
G′
∑
λ
[
(k +G′
)× eλ
]
·[
(k +G)× eλ′
]
κr(G−G′
) hλG′ =
(
ω
c
)2
µrhλ′
G. (32)
Upon exchanging G and G′
(transformations: G → G′′
, G′ → G, G
′′ → G′
), we obtain
∑
G
∑
λ
[
(k +G)× eλ
]
·[
(k +G′
)× eλ′
]
κr(G′ −G) hλG
=
(
ω
c
)2
µrhλ′
G′ . (33)
which is the relation given in [Joannopoulos et al., 1995, p. 129]. Upon using the same
notation, we rewrite Eq. (33) as:
∑
λG
Θk(λG),(λG)′
h(λG)
=
(
ω
c
)2
µrh(λG)′
, (34a)
where
Θk(λG),(λG)′
= κr(G′ −G)
[
(k +G)× eλ
]
·[
(k +G′
)× eλ′
]
. (34b)

6 3.1 Matrix form
3.1 Matrix form
We can cast Eq. (33) in matrix form. First, we rewrite the kernel of the operator of Eq. (34b)
as:
[
(k +G)× eλ
]
·[
(k +G′
)× eλ′
]
=
∣
∣
∣
∣
(k +G)
∣
∣
∣
∣
∣
∣
∣
∣
(k +G′
)
∣
∣
∣
∣
[e3 × eλ] · [e3 × eλ′ ] . (35)
Remembering that e3 × e1 = e2 and e3 × e2 = −e1, we can write:
[e3 × eλ] · [e3 × eλ′ ] =
(
e2 · e2 −e2 · e1−e1 · e2 e1 · e1
)
, (36)
so that we write the operator as:
Θk(λG),(λG)′
= κr(G′ −G)
[
(k +G)× eλ
]
·[
(k +G′
)× eλ′
]
= κr(G′ −G)
∣
∣
∣
∣
(k +G)
∣
∣
∣
∣
·∣
∣
∣
∣
(k +G′
)
∣
∣
∣
∣
(
e2 · e2 −e2 · e1−e1 · e2 e1 · e1
)
, (37)
used in Eq. (34a).

Study of EM waves in Periodic Structures: Photonic Crystals and
Negative refraction
Massachusetts Institute of Technology
6.635 lecture notes
1 Introduction
In the previous class, we have introduced various concepts necessary for the study of EM waves
in photonic crystal structures. We shall now use these concepts to explain various results such
as:
• Reconstruction of the permittivity profile.
• The band diagrams for rectangular and triangular lattices.
• k-surfaces for various eigenvalues.
In particular, we will show an example of how a periodic structure can exhibit k-surfaces typical
of a negative refraction material (the concept of k-surface for left-handed materials was first
introduced in the class of February 24, 2003).
This class is based on the following two references::
[1] C. Luo, S. G. Johnson, and J. D. Joannopoulos, “All-angle negative refraction with-
out negative effective index”, Physical Review B, vol. 65, 2002, #201104.
[2] J. D. Joannopoulos, R. D. Meade, and J. N. Winn, “Photonic Crystals, Molding the
Flow of Light”, Princeton University Press, 1995.
2 Retrieving the permittivity
We have presented already the way to calculate the Fourier coefficients of the permittivity for
cylindrical inclusions, with circular cross-section (see section 5 of March 19 2003 notes). An
example was also given in Fig. 7. We shall just briefly comment on this.
It is known already that a photonic crystal is defined by a lattice (rectangular, triangular, . . . )
and a basis (the shape of the inclusion). Both have to be incorporated in the retrieval of ε for
example. In the treatment presented last time (section 5 of the reference mentioned above) we
obtained the Fourier coefficients of the permittivity for a specific lattice (square). The result
was:
1

2 Section 2. Retrieving the permittivity
ε(Gρ) =
εafr + εb(1− fr) if Gρ = 0
(εa − εb)fr2J1(GρRc)
GρRcelsewhere.
(1)
Yet, the information on the basis is also included in Eq. (1), since both Gρ and fr will depend
on it.
It is straightforward to show that:
Square lattice: fr = π
(
Rc
a
)2
(where Rc is the radius of the inclusions and a the
lattice constant).
Triangular lattice: fr =2π√3
(
Rc
a
)2
.
An illustration for square and triangular lattices is given in Fig. 1 (note that since the
permittivity is obtained from its Fourier coefficients, a unavoidable Gibbs phenomenon will
occur).
(a) Square lattice (fr = 38.48%). (b) Triangular lattice (fr = 44.43%).
Figure 1: Reconstruction of the permittivity for cylindrical rods of circular cross-
section for (a) a square lattice and (b) a rectangular lattice. Other parameters are:
εa = 1, εb = 12, Rc/a = 0.35.

3
3 Band diagrams
The purpose of all the mathematical developments presented so far (getting the Fourier coef-
ficients of the permittivity, building the eigensystem, etc) is to eventually obtain the eigenval-
ues and eigenvectors of the problem. Eigenvalues correspond to dispersion diagrams whereas
eigenvectors correspond to the actual field distributions. We shall limit ourselves here to the
consideration of eigenvalues only.
Upon solving the eigensystem:
Θ H(r) =
(
ωk
c
)2
H(r) , (2a)
Θ = ∇×[
1
ε(r)∇×
]
, (2b)
(with the condition ∇ · H(r) = 0 to reduce the size of the system), we get a set of eigenvalues
for each incident k. The band diagrams are then constructed by sweeping all possible k.
Because of the periodicity of the medium the “all possible” k can be reduced to the first
Brillouin zone and, by symmetry, further reduced to the irreducible Brillouin zone. In addition,
as we have seen, it is also enough to span the edge of the Brillouin zone since it corresponds to
the maximum diffraction condition. Again by symmetry, we further reduce the domain to the
edge of the irreducile Brillouin zone.
This zone will of course depend on the lattice, as is shown in Figs 2 and 3 of the March 19
2003 notes. For both cases, the irreducible Brillouin zone is depicted in Fig. 2.
PSfrag replacements
ΓX
M
(a) Square lattice.
PSfrag replacements
Γ
KM
(b) Triangular lattice.
Figure 2: Irreducible Brillouin zones (red region) for (a) a square lattice and (b) a
triangular lattice. Each region is defined between symmetry points of the crystal.
In order to span the edge of the irreducible Brillouin zone, we therefore need to know the
coordinates of the symmetry points of the crystal. It is easy to show that:

4 Section 3. Band diagrams
• Square lattice:
Γ → (kx = 0, ky = 0) , (3a)
X → (kx =π
a, ky = 0) , (3b)
M → (kx =π
a, ky =
π
a) . (3c)
• Triangular lattice:
Γ → (kx = 0, ky = 0) , (4a)
K → (kx =2π
3a, ky =
2π√3a
) , (4b)
M → (kx = 0, ky =2π√3a
) . (4c)
Having these limit points, we can sweep k, solve the eigensystem and obtain the eigenvalues.
An example is given in Fig. 3.

5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fre
quen
cy ω
a/2
π c
Square lattice: Rc/a = 0.48 (f=72.3823%), εa=1, ε
b=13.
TETM
PSfrag replacements
Γ ΓX M
(a) Square lattice.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fre
quen
cy ω
a/2
π c
Hexagonal lattice: Rc/a = 0.48 (f=83.5799%), εa=1, ε
b=13.
TETM
PSfrag replacements
Γ ΓM K
(b) Triangular lattice.
Figure 3: Band diagram for TE and TM modes as function of the normalized fre-
quency for (a) a square lattice and (b) a triangular lattice. Notice the absolute band
gap for TM modes. Parameters are: εa = 1, εb = 13, Rc/a = 0.48. Important note:
TE modes are here defined as transverse to the axis of the crystal (z axis), therefore
with an in-plane electric field!! Note also that these curves have not yet fully reached
convergence.

6 Section 4. k-surfaces
4 k-surfaces
4.1 Well-chosen example
We can generalize the band diagram of the previous section (which, again, spans only the edge
of the Brillouin zone), to the entire zone or even to the entire photonic crystal.
The example we shall consider from now on is taken from [1] and the parameters are sum-
marized in Tab. 1. In addition, we shall work with TE modes (remember that in this notation,
TE corresponds to an in-plane electric field).
Lattice: square
Inclusions: εa = 1
Background: εb = 12
Radius : Rc/a = 0.35
Table 1: Parameters for our example [1].
The band diagram obtained for this case is depicted in Fig. 4.
0 10
0.1
0.2
0.3
0.4
0.5
Fre
quen
cy ω
a/2
π c
Square lattice: Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
TE
PSfrag replacements
Γ
Γ
X M
Figure 4: Band diagram for TE modes for the structure defined in Tab. 1. The
horizontal line is at the frequency corresponding to a change of curvature of the k-
surface, and the green line is the light-line shifted to M.
.

7
We can also extend the plot from the edge of the irreducible Brillouin zone to the entire
structure, for various eigenstates. This is represented in Figs. 5 to 7.
4.2 Negative refraction
From the k-surfaces shown in the figures of this section, we see that there is the potential of
negative refraction (the iso-frequency surfaces converge to a point as frequency increases). Yet,
we need to make sure that:
1. We can couple to one of these surfaces from free-space.
2. The power is bending on the same side of the normal.
Answer to both points is shown in Fig. 4.
1. Light-line: the light-line gives the radius of the k-surface of an EM wave impinging on
the crystal from free-space. In order to have a possible coupling, whole (or part) of the
free-space k-surface has to be included in one of the k-surfaces of the crystal. The light-line
is represented in Fig. 4 by the green line (it is actually the translation of the light-line to
M). Its intersection with say the curve of the first eigenvalue gives the maximal frequency
for which the condition mentioned above (total inclusion of the free-space k-surface into a
k-surface of the crystal) is satisfied.
Note also that in order to have a negative refraction, the free-space k-surface has to be
included in one of the k-surfaces converging to M and therefore, the actual crystal needs
to be rotated by 45.
2. Power bending: around M , the power is converging to a single point when frequency is
increased. Yet, the direction of the power can be deduced from the gradient of the k-curves
and therefore, directly from their radius of curvature. Hence, if the radius of curvature is
such that the gradient is pointing toward M , the refraction will be negative.
The frequency at which the radius of curvature diverge is given by the horizontal line in
Fig. 4, which can be obtained by a direct inspection of Fig. 5(c).
As it can be seen, the power can bend on the opposite side of the normal. However, the
phase is still propagating forward, which justifies the title of the paper: “All-angle negative
refraction without negative index”.
We can also examine the second eigenvalue and see if a similar phenomenon can appear. The
k-surface has been depicted in Fig. 6(b) and is shown again in Fig. 9 with less curves represented.
It is clear from this figure that again, there is a point at which the radius of curvature of the
k-curves changes, and energy converges to a single point (Γ this time) as frequency increases.
It is therefore again possible to have a negative index of refraction. Notice that in this case

8 4.2 Negative refraction
−4000
−2000
0
2000
4000
−4000
−2000
0
2000
40000
0.05
0.1
0.15
0.2
0.25
Squ. lattice. Band of eigenvalue nb 1. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
(a) Brillouin cell. (b) All structure.
20 40 60 80 100 120 140 160
20
40
60
80
100
120
140
160
Squ. lattice. Band of eigenvalue nb 1. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
(c) 2D k-surface.
Figure 5: k-surfaces for the first eigenvalue of the system.

9
−4000
−2000
0
2000
4000
−4000
−2000
0
2000
40000.26
0.28
0.3
0.32
0.34
0.36
Squ. lattice. Band of eigenvalue nb 2. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
(a) Brillouin cell.
20 40 60 80 100 120 140 160
20
40
60
80
100
120
140
160
Squ. lattice. Band of eigenvalue nb 2. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
0.28
0.29
0.3
0.31
0.32
0.33
0.34
(b) 2D k-surface.
Figure 6: k-surfaces for the second eigenvalue of the system.
however, because of phase matching, power and phase are in directions that make an angle
greater than π/2. Although it is not necessarily π like in a pure left-handed regime, it is still in
the regime of left-handed behavior. Fig. 10 can be completed to see this phenomenon.

10 4.2 Negative refraction
−4000
−2000
0
2000
4000
−4000
−2000
0
2000
40000.38
0.39
0.4
0.41
0.42
0.43
0.44
0.45
Squ. lattice. Band of eigenvalue nb 3. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
(a) Brillouin cell.
20 40 60 80 100 120 140 160
20
40
60
80
100
120
140
160
Squ. lattice. Band of eigenvalue nb 3. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
0.395
0.4
0.405
0.41
0.415
0.42
0.425
0.43
0.435
(b) 2D k-surface.
Figure 7: k-surfaces for the third eigenvalue of the system.

11
5 10 15 20 25 30 35 40 45 50 55
5
10
15
20
25
30
35
40
45
50
55
Squ. lattice. Band of eigenvalue nb 2. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
0.25
0.26
0.27
0.28
0.29
0.3
0.31
Figure 9: k-surface for the second eigenvalue.

12 4.2 Negative refraction
22 24 26 28 30 32 34
22
24
26
28
30
32
34
Squ. lattice. Band of eigenvalue nb 2. Rc/a = 0.35 (f=38.4845%), εa=1, ε
b=12.
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figure 10: k-surface for the second eigenvalue for the specific frequency where the
radius of curvature is positive.