Mfemd.ch02
14
. 2 PMP & LMDFE Systems: Kinematics 2–1
Transcript of Mfemd.ch02

.
2PMP & LMDFE
Systems:Kinematics
2–1

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–2
TABLE OF CONTENTS
Page§2.1. Equivalence of Dynamical Systems 2–3
§2.1.1. PMP-LMDFE Equivalence . . . . . . . . . . . . . 2–3§2.1.2. Generalization: More General Interaction Forces . . . . . 2–5§2.1.3. Generalization: Continuum Models . . . . . . . . . . 2–6
§2.2. Configurational Properties 2–7§2.2.1. Particle Coordinates . . . . . . . . . . . . . . . 2–7§2.2.2. Velocities and Accelerations from Coordinates . . . . . . 2–7§2.2.3. Initial, Current and Final Configurations . . . . . . . . 2–7§2.2.4. Initial Conditions . . . . . . . . . . . . . . . . 2–8
§2.3. Motion Properties 2–8§2.3.1. Displacements . . . . . . . . . . . . . . . . 2–8§2.3.2. Velocities and Accelerations From Displacements . . . . . 2–9§2.3.3. Kinematic Constraints . . . . . . . . . . . . . . 2–9§2.3.4. Response and Trajectories . . . . . . . . . . . . . 2–10§2.3.5. Possible and Actual Displacements . . . . . . . . . . 2–10§2.3.6. Virtual Displacements . . . . . . . . . . . . . . 2–11
§2.4. Mass Distribution Properties 2–11§2.4.1. Center of mass . . . . . . . . . . . . . . . . 2–12§2.4.2. Linear Moment . . . . . . . . . . . . . . . . . 2–12§2.4.3. Quadratic Mass Moment . . . . . . . . . . . . . 2–12§2.4.4. Mass Moment of Inertia . . . . . . . . . . . . . . 2–12§2.4.5. Mass Product of Inertia . . . . . . . . . . . . . 2–13§2.4.6. Inertia Tensor . . . . . . . . . . . . . . . . . 2–13§2.4.7. Inertia Tensor Transformations . . . . . . . . . . . 2–14
2–2

2–3 §2.1 EQUIVALENCE OF DYNAMICAL SYSTEMS
§2.1. Equivalence of Dynamical Systems
Classical dynamics reached maturity in the last half of the XIX Century. Over its 300+ year devel-opment, this discipline has been primarily concerned with point-mass particle or PMP systems.1
Such systems are composed by interacting particles of finite mass that evolve in time as per theaction of external and internal forces.
But the primary concern of this book are dynamic models constructed through the Finite Elementmethod (FEM). Why should we worry about PMP systems?
§2.1.1. PMP-LMDFE Equivalence
The surprising answer is
Point-Mass Particle (PMP) systems with short-range interaction forces andLumped-Mass-Discretized Finite Element (LMDFE) dynamic models arecomputationally equivalent.
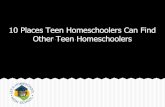
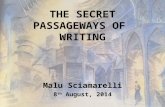
The system classes referred to above may be easier to grasp by looking at Figure 2.1. Instances arepictured as two-dimensional models for easier visualization. The model pictured in Figure 2.1(a)is a classical PMP system: a set of point-mass particles interacting with their neighbors (particleself interactions are not pictured to reduce clutter).2 The model shown in Figure 2.1(b) is a typicalFEM mesh that discretizes a circular domain with 3-node triangles, in which the distributed mass islumped at the nodes. This model only has translational freedoms, which are the node displacements.The presence of rotational freedoms is discussed in the next subsection.
What does “computational equivalence” mean? That these seemingly disparate models producesemidiscrete equations of motion (EOM) in one-to-one correspondence. For example, the matrixEOM for linear, undamped dynamic models from either source can be written
M u + K u = f, (2.1)
in which M, and K are the mass and stiffness matrices, respectively, u is a vector of displacementsfrom a reference position, and f the corresponding vector of known forces. Although the EOM(2.1) for PMP and LMDFE models are constructed in completely different ways, once that is donethe systems have exactly the same form.
Table 2.1 shows an item-by-item correspondence. Note that there is none for one component ofthe LMDFE system: elements. This means that element-by-element operations, which for thosemodels are the basis for forming and updating the semidiscrete EOM, have no PMP counterpart.But if abstraction is made on how such operations are carried out (or are viewed as a “black box”)the equivalence holds.
1 Recall that a PMP was defined in Chapter 1 as: “a particle that possesses only two essential attributes: position in spacexi and finite mass mi . All other properties, such as spatial extent and internal structure, are irrelevant.”
2 Node-to-node FEM interactions forces are not necessarily node colinear (that is, act along the line that join the two nodes)if elements model a flexible medium. They are depicted that way in Figure 2.1 for visual simplicity.
2–3

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–4
(a) (b)
Figure 2.1. Two dynamical models that are computationally equivalent in a formal sense: (a) a PMPsystem with short-range interaction forces, with particle self interactions not drawn to reduce clutter;
(b) a Lumped-Mass-Discretized Finite Element (LMDFE) model built of 3-node triangles.
Why is the equivalence important? Knowledge reuse. Scientists from Newton through Poincaredeveloped the theory and practice of PMP systems over three centuries. The fruits of that laborshould not be allowed to go through waste just becase FEM and computers changed the way we dodynamic simulations.
It is true that many of the classical expositions look cluttered and obscure in modern eyes. Forexample, Euler, Lagrange and Hamilton published their masterpieces way before matrix and vectorswere invented, and lacked present knowledge of numerical methods and computation3 But theirdiscoveries and results endure. There is no point in reinventing the wheel and letting all that finework go to waste. What we can do is to present relevant excerpts of their results in a clearer andmore compact notation, and reinterpret them as necessary in light of current modeling tools andcomputational methods.
Remark 2.1. Note that the formal equivalence holds only between two spatially discrete models. It completelybypasses the sticky question of continuum model equivalence, which is briefly discussed in §2.1.3.
Remark 2.2. Both models in 2.1 have only translational degrees of freedom. An immediate generaliztionis to allow for more general freedoms, such as, for instance, nodal rotations in FEM. On the PMP side, thisequivalence is easily covered by the dynamic of rotating bodies, which in turn is a special case of the generaldescription of Lagrangian dynamical systems by generalized coordinates.
3 In fact, Lagrange boasts in his famous book [227] about not having a single figure or diagram, and there are no numericalexamples. (Contrast with Euler and the Bernoullis, who favored a balanced mix of theories and applications.) This lackof practical exercitation led Lagrange and others hands-off purists into various errors, some of which propagated forseveral generations. Most errors were fixed, however, over the course of time.
2–4

2–5 §2.1 EQUIVALENCE OF DYNAMICAL SYSTEMS
Table 2.1. Correspondence Between PMP and LMDFE Dynamical System Models
LMDFE system PMP system
Node ParticleLumped node mass Point massStiffness and damping forces Interaction forcesApplied node forces Applied particle forcesNode position Particle positionNode displacements Particle displacementsNode velocities Particle velocitiesNode accelerations Particle accelerationsElement No counterpart
§2.1.2. Generalization: More General Interaction Forces
Each of the dynamic models illustrated in Figure 2.1 obeys certain restrictions:
• The PMP system in Figure 2.1(a) assumes short range interaction forces. More precisely, eachparticle interacts only with its neighbors as well as itself. What is behind this restriction? Inthe LMDFE model, the node-by-node interaction extends only over one element because ofthe local support feature of FEM.
• The LMDFE system in Figure 2.1(b) assumes that the mass of the discretized domain is lumpedat the nodes. This restriction is dictated by the definition of point-mass particle.
Can these restrictions be removed while mantaining computational equivalence? The answer isyes, but “equivalence” must be understood in a less formal sense. To make the discussion concrete,reference to the linear matrix EOM (2.1) will be convenient.
Long range interaction. In PMP systems, allowing each particle interact with all others, as well aswith itself, poses no problem. The effect on the EOM (2.1) is that the stiffness matrix K becomesfully populated. In conventional FEM models, K is sparse on account of the local support of elementinterpolation. There is no conceptual difficulty, however, in imagining LMDFE models based ona global interpolation (across elements) that couples all nodal freedoms. Although such modelswould be computationally inefficient, there are no laws that preclude them.
Generalized mass discretization. A lumped-mass FEM discretization scheme produces a diagonalmass matrix M in (2.1). But more general mass discretizations, abbreviated by GMDFE, are incommon use in FEM, and lead to a nondiagonal M. An example is consistent mass lumping.Accounting for this more encompassing approach has only one side effect on the EOM (2.1): themass matrix M becomes nondiagonal. Such a change is practically important only as regard com-putational efficiency of certain procedures, for example explicit time integration. CorrespondingPMP systems are less common because they would involve particle-to-particle interaction forcesthat depend on accelerations.4
4 Some controversy exists in this regard. In his well known book on Analytical Dynamics, Pars [298] states that acceleration-dependent forces would violate the tenets of Newtonian dynamics. This claim has been shown to be fallacious in a recentpaper [419].
2–5

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–6
Point-Mass Particle (PMP)systems with long-range
interaction
Limit continuum models Source continuum models
Point-Mass Particle (PMP)systems with short-range
interaction
Formallyequivalent
Models illustrated
in Figure 2.1
Informallyequivalent
Lumped-mass-discretized finite element
(LMDFE) models
Generally-mass-discretized finite element
(GMDFE) models
No generally known equivalence
Generalizedmass
discretization
Generalizedinteraction
range
ContinuificationFinite elementdiscretization
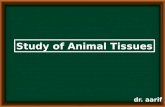
Figure 2.2. Flowchart showing two generalizations levels beyond the equivalentdynamic models of Figure 2.1.
In summary, lifting both restrictions has only side effects on the configuration of the matrices Kand M in the EOM (2.1). We can say that informal equivalence persists, since those changes haveconsequences on computational efficiency but not on methodology. See Figure 2.2 for a diagramaticrepresentation of those extensions.
§2.1.3. Generalization: Continuum Models
A more challenging extension is to continuum models, governed by field equations. This can bedone in two conceptually different ways:
• Passing to the continuous limit in a PMP system.
• Going back to the source continuum model from which a FEM discretization was derived.
Although some forms of continuum-discrete equivalence can be proven between specific systems,the general case is still the matter of much debate and controversy in the physical sciences, asrecently reviewed in [232]. Thus the “outer loop” of Figure 2.2 is not yet closed. Since that kindof correspondence is beyond the scope of this book, nothing more will be said about the topic.
The following sections summarize well known kinematic properties of PMP systems. The de-scription largely follow standard expositions of Classical Dynamics. Some deviations are made,however, when there is explicit need to link up with the finite element models that are the main targetof the book. In compliance with this objective, matrix and vector notation will be emphasized.
2–6

2–7 §2.2 CONFIGURATIONAL PROPERTIES
§2.2. Configurational Properties
The properties described here pertain to the composition of the system and its time evolution.
The PMP system consists of N particles of mass mi in 3D space, in which i denotes the particleindex. As regards terminology, for a equivalent FEM model, use the correspondences annotated inTable 2.1; for example “particle” → “node,” “point mass” → “lumped node mass,” etc.
§2.2.1. Particle Coordinates
The position coordinates of the i th particle are taken with respect to a fixed Rectangular CartesianCoordinate (RCC) reference frame Oxyz with origin at O and axes {x, y, z}. The coordinates ofthe i th point mass are {xi , yi , zi }.5 The coordinates are grouped into the 3-vector
xi = [ xi yi zi ]T . (2.2)
All particle coordinates are grouped into a 3 × N matrix form as
X = [ x1 x2 . . . xN ] =[ x1 x2 . . . xN
y1 y2 . . . yN
z1 z2 . . . zN
]. (2.3)
For some derivations it is useful to have all particle coordinates arranged as a 3N -vector configuredas
x = [ x1 y1 z1 x2 y2 z2 . . . xN yN zN ]T . (2.4)
In a dynamical system, particle positions evolve in time, so xi = xi (t), etc. For all particles onewrites X = X(t) or x = x(t).
§2.2.2. Velocities and Accelerations from Coordinates
Particle velocities and accelerations are obtained by taking derivatives of the position coordinateswith respect to time, viz.,
x(t) = dx(t)
dt, x(t) = d2x(t)
dt2. (2.5)
These can be alternatively expressed in terms of particle displacements taken with respect to a fixedreference configuration, as described later in §2.3.2.
§2.2.3. Initial, Current and Final Configurations
Dynamic system simulations start at an initial time t0, which is usually taken to be t0 = 0, and endat a final time t f . A generic time t considered within the interval [t0, t f ] is called the current time.Positions occupied by the particles at initial, current and final times are called initial, current andfinal coordinates, respectively.
The particle arrangements at t0, t and t f are collectively called initial, current and final configuration,respectively. Configurations will be labeled by calligraphic letters: C0, Ct and C f , respectively, to
5 Note that if the axes were labeled {x1, x2, x3}, an additional subscript would be needed, cluttering formulas.
2–7

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–8
avoid confusion with symbols such as C0, which express function continuity order.6 The subscriptt in Ct may be dropped for brevity.
It is often convenient for brevity to exhibit the time as a subscript of the position coordinate symbols(2.3) or (2.4); for example
X0 = X(0), Xt = X(t), X f = X(t f ), x0 = x(0), xt = x(t), x f = x(t f ). (2.6)
§2.2.4. Initial Conditions
For a dynamic system the initial conditions specified at C0 include
Initial Position. The positions x0 = x(t0) of the particles at are given.
Initial Velocities. The velocities x0 = x(t0) of the particles are given.
The former may be substituted by initial displacements, while the latter may be substituted byinitial momenta. If the motion is subject to kinematic constraints, as discussed in §2.3.3, the initialconditions are assumed to satisfy those restrictions.
§2.3. Motion Properties
This section introduces terminology associated with specific aspects of the kinematics of motion.Displacements are given a key role comparable to that of particle coordinates. This balancedviewpoint is motivated by finite element applications; see Remark 2.1 at the end of §2.3.2.
§2.3.1. Displacements
Displacements measure change in particle positions. The vector symbol for displacements is u,with its Oxyz components denoted by ux , uy and uz . Suppose that the i th particle moves fromxi (t1) to x(t2). The corresponding displacement vector is
ui (t2, t1) = xi (t2) − xi (t1) =[ uxi (t2) − uxi (t1)
uyi (t2) − uyi (t1)uzi (t2) − uzi (t1)
]. (2.7)
If t1 = t0, the initial time, and t2 = t , the current time, the notation is simplified by dropping thearguments:
ui = ui (t) = ui (t, t0) = xi (t) − xi (t0). (2.8)
This ui is called the total displacement of the particle, or simply its displacement unless a distinctionneed to be made. For the set of all particles a 3 × N displacement matrix arranged like X in (2.3)is rarely used. More convenient is to have all displacements arranged as a 3N -vector configured as
u = [ ux1 uy1 uz1 ux1 uy1 uz1 . . . ux N uyN uzN ]T , (2.9)
6 State and configuration should not be confused. The former term is quantitative: it refers to values of the state variables,which is a set that fully describes the system and its response to inputs. The latter term is qualitative: it refers to thespatial arrangement of the particles that make up the system. Emphasis is on form visualization or, informally, how thesystem is set up.
2–8

2–9 §2.3 MOTION PROPERTIES
in direct correspondence to the position coordinate vector displayed in (2.4). The omission ofarguments in (2.9) implies change from the initial configuration C0 to to the current one C. Forother time intervals, arguments may be used as necessary for clarity. Thus
u = u(t) = u(t, t0) = x(t) − x(t0) = xt − x0, u(t2, t1) = x(t2) − x(t1). (2.10)
For equivalent FEM models, u denotes the node displacement vector; cf. Table 2.1. In this casethe entries in u are ordered node-by-node.
§2.3.2. Velocities and Accelerations From Displacements
As described in §2.2.2, particle velocities and accelerations result on taking time derivatives of theposition coordinates; cf. (2.5). Since the initial configuration is fixed, they may be also obtainedby taking time derivatives of total displacements:
u(t) = du(t)
dt= d(x(t)−x(t0))
dt= x(t), u(t) = d2u(t)
dt2= d2(x(t)−x(t0))
dt2= x(t). (2.11)
Again for brevity time arguments may be dropped, or replaced by appropriate subscripts. Forexample, x = xt = x(t), u0 = u(t0), etc.
Remark 2.3. In many textbooks and monographs on Classical Mechanics, total displacements are conspicuousfor their absence. One may look in vain for symbols such as (2.7) through (2.10). More likely is to find �xi
for incremental displacements and δxi for virtual displacements (or �xi and δxi if the exposition uses vectors).In sharp contrast, node displacements are the key state variables in the Direct Stiffness Method (DSM) ofFEM, and play a fundamental role therein. Since FEM dynamic models are our ultimate objective, bothdisplacements and position coordinates will be used in a balanced fashion.
§2.3.3. Kinematic Constraints
Kinematic constraints are restrictions on the motion of a dynamic system. Although those restric-tions are studied in greater detail in Chapter 5, we introduce here basic definitions required to discussthe distinction between possible and virtual displacements in §2.3.6. Two possible constraint formsare of interest. Holonomic constraints involve particle coordinates and possibly time:
ci (x, t) = 0, i = 1, . . . mh, (2.12)
A holonomic constraint that does not depend on time: ci (x) = 0, is called rheonomic. It iscalled scleronomic otherwise. Nonholonomic constraints are those that involve particle coordinates,particle velocities, and possibly time, and that cannot be integrated into a holonomic form. In thissubsection we will consider only the subclass that is linear in velocities:
di (x, t) x + gi (x, t) = 0, i = 1, . . . mn, (2.13)
The total number of constraints, m = mh + mn , must be less than the total number of degrees offreedom nDOF of a N -particle system, which is nDOF = 3N in 3D and nDOF = 2N in 2D. (Notethat either mh or mn may be zero.) Differentiating (2.12) with respect to time yields
∂ci (x, t)
∂xx + ∂ci (x, t)
∂t, i = 1, . . . mh, (2.14)
2–9

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–10
The nonholonomic constraints (2.13) and the differentiated holonomic constraints (2.14) can becombined in the compact matrix form
A x = g, (2.15)
in which A = A(x, t) is a m × nDOF matrix and g = g(x, t) is a nDOF-vector. Multiplying bothsides by dt gives the differential form
A dx = g dt. (2.16)
The homogeneous version of (2.15) isA x = 0. (2.17)
Form (2.17) results if all holonomic constraints are rheonomic (that is, do not depend on time), andthe velocity-independent terms gi of all nonholonomic constraints vanish.
Note that the compact matrix forms (2.15) through (2.17) only apply if the nonholonomic constraints(2.13) are linear in the velocities, or if all constraints are holonomic, that is, mn = 0. A matrixform that accomodates nonlinear-in-velocities nonholonomic constraints is worked out later.
Example 2.1. Suppose that a single particle moving in 3D space and referenced to the Oxyz frame is subjectedto the two constraints
x1 + y1 + z1 = 12 B t2, x1 x1 + y1 y1 + z1 z1 = 3 C, (2.18)
in which x1, y1 and z1 denote the coordinates of the particle while B and C are coefficients that restore theproper physical dimensions. Time differentiation of the first (holonomic) constraint gives x1 + y1 + z1 = B t .Combining with the second (nonholonomic) constraints yields
[1 1 1x1 y1 z1
][x1
y1
z1
]=
[B t3 C
], (2.19)
which befits the matrix form (2.15). Here A is a 2 × 3 matrix.
§2.3.4. Response and Trajectories
The vector function x(t) for t0 ≤ t ≤ t f that satisfies the equations of motion, initial conditionsand kinematic constraints is called the response history, or simply response, of the PMP system.By analogy the associated functions u(t) = x(t) − x(0), u(t) = x(t), and u(t) = x(t), are calledthe displacement, velocity and acceleration response, respectively, of the system.
If the focus is on an individual particle, say the i th one, the locus of its position history xi (t) is calledthe trajectory or orbit of the particle. By extension, x(t) is sometimes called the system trajectory,especially in control system applications.
§2.3.5. Possible and Actual Displacements
The system is assumed to be in configuration Ct at current time t . We now take a deeper lookat motions in that neighborhood. The particle displacements at Ct are ut = u(t) and ut = u(t),respectively. These are assumed to satisfy the EOM as well as any kinematic constraints such as(2.12) and (2.13). Under these assumptions, ut = u(t) is called the actual velocity at Ct .
2–10

2–11 §2.4 MASS DISTRIBUTION PROPERTIES
Consider the displacement change between the current configuration at t and a possible one takenat an infinitesimal time increment t + dt :
duP = x(t+dt) − x(t), or duP = u(t+dt) − u(t). (2.20)
By possible configuration is meant one that satisfies the kinematic constraints grouped in (2.15),at t + dt . If so duP is called a possible displacement increment or simply possible displacement.7
Notice the omission of the time arguments in duP for brevity.
If a possible displacement satisfies the equations of motion at Ct , in addition to the constraints, it iscalled a actual displacement increment or simply actual displacement. If the actual velocity ut (t)at Ct is unique, the actual displacement du = ut dt is also unique.
§2.3.6. Virtual Displacements
The vector of virtual displacements, denoted by δu, plays a central role in analytical mechanics. Ifthere are no restrictions on the motion, any set of displacements relative to that at Ct qualifies. Inthis case, δu coalesces with the possible displacements defined by (2.20), whence δu ≡ duP .
The definition becomes more subtle when there are kinematic constraints, which are collectivelydescribed by (2.15). Several equivalent definitions are possible; three of which are listed next.
Algebraic Definition. Consider the homogeneous version (2.17) of (2.15). Any nDOF-vector thatsatisfies this homogeneous equation is a virtual displacement vector. More formally: multiply bothsides of A x = 0 by dt , and call δu = x dt . Thus
A δu = 0. (2.21)
Slightly different track favored by some authors: take the differential version (2.16), set g = 0 andreplace dx by δu.
Definition From Possible Displacements. Consider two possible (and distinct) displacements duP1
and duP2 taken fromthe same configurationCt . Their difference is a virtual displacement:
δ u = duP2 − duP
1 . (2.22)
Equivalence with the previous definition is readily established; see page 133 of [390].
Variational Calculus Definition. In the variational framework of PMP dynamics, either x or u isconsidered the state variable vector, whereas time t is the independent variable. Then δx or δu isthe conventional state variation taken at “frozen” time t .
Remark 2.4. Readers should be warned that many expositions have conceptual glitches as regards virtualdisplacements. Some define it as “a displacement compatible with the constraints”, which is wrong unless(2.15) is homogeneous to begin with. The correct assertion is “a displacement compatible with the homogenizedconstraints.” Even more common is the statement that virtual displacements are infinitesimal. That is nonsense.By the algebraic definition A δu = 0. Therefore A (c δu) = 0 where c is an arbitrary factor, whence the virtualdisplacement order-of-magnitude is irrelevant: microns, kilometers or light-years make no difference.
To exemplify how the aforemetioned glitches appear even in reputable expositions, consider the followingstatement in [347, p. 50]: “A virtual displacement is an arbitrary, instantaneous, infinitesimal change of theposition of the system compatible with the conditions of constraint.” Score: two out of four.
7 Other names for duP in the literature are real displacements, admissible displacements and feasible displacements. Someexpositions replace the differential symbol d by the increment symbol �; this makes no essential difference.
2–11

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–12
§2.4. Mass Distribution Properties
This section collects properties associated with the distribution of masses in PMP systems andequivalent LMDFE models. As noted in Remark 2.5, these can be extended without difficulty tocontinuum mass distributions.
§2.4.1. Center of mass
The center of mass of a PMP system is the point located at
xC =∑
i mi xi∑i mi
= 1
mtot
∑i
mi xi = 1
mtot
[ ∑i mi xi∑i mi yi∑i mi zi
], (2.23)
in which i ranges from 1 through N , and mtot = ∑i mi is the total mass. For a continuum body,
see Remark 2.5.
§2.4.2. Linear Moment
The linear mass moment of an N -particle PMP system with respect to a point Q of coordinatesxQ = [ xQ yQ zQ ]T is the 3-vector
pQ =∑
i
mi (xi−xQ) =[ ∑
i mi xi Q∑i mi yi Q∑i mi zi Q
], (2.24)
in which i ranges from 1 through N , xi Q = xi − xQ , yi Q = yi − yQ , and zi Q = zi − zQ . If pointQ is the center of mass C , the three components of pQ → pC vanish. For a continuum body, seeRemark 2.5.
§2.4.3. Quadratic Mass Moment
The quadratic mass moment of an N -particle PMP system with respect to a point Q of coordinatesxQ = [ xQ yQ zQ ]T is the 3 × 3 symmetric matrix
PQ =∑
i
mi (xi−xQ) (xi−xQ)T =
∑i mi xi Q xi Q
∑i mi xi Q yi Q
∑i mi xi Q zi Q∑
i mi yi Q xi Q
∑i mi yi Q yi Q
∑i mi yi Q zi Q∑
i mi zi Q xi Q
∑i mi zi Q yi Q
∑i mi zi Q zi Q
, (2.25)
in which i ranges from 1 through N , xi Q = xi − xQ , yi Q = yi − yQ , and zi Q = zi − zQ . Taking Qto be the center of mass minimizes PQ in some norms. For a continuum body, see Remark 2.5.
Remark 2.5. For a continuum body of density ρ and volume , the foregoing definitions apply if summa-tions are replaced by integrations over the volume. More precisely, (2.23), (2.24), and (2.25) are replaced,respectively, by
xC =∫
ρ x dV∫
ρ dV
, pQ =
∫
ρ (x−xQ) dV∫
ρ (y−yQ) dV∫
ρ (z−zQ) dV
,
PQ =
∫
ρ (x−xQ) (x−xQ) dV∫
ρ (x−xQ) (y−yQ) dV
∫
ρ (x−xQ) (z−zQ) dV∫
ρ (y−yQ) (x−xQ) dV∫
ρ (y−yQ) (y−yQ) dV
∫
ρ (y−yQ) (z−zQ) dV∫
ρ (z−zQ) (x−xQ) dV∫
ρ (z−zQ) (y−yQ) dV
∫
ρ (z−zQ) (z−zQ) dV
.
(2.26)
2–12

2–13 §2.4 MASS DISTRIBUTION PROPERTIES
(a)
axis a
(b) (c)
dai mi
dpidqimi
x y
z
mi
xi
yizi
O
plane p plane q
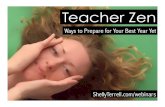
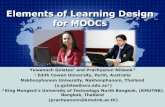
Figure 2.3. Moments and product of inertia of an individual particle of mass mi : (a) mass moment of inertiawith respect to a line L at distance di ; (b) mass product of inertia with respect to two orthogonal planes atdistances di1 and di2, respectively; (c) mass moments and products of inertia with respect to a RCC frame
Oxyz.
§2.4.4. Mass Moment of Inertia
The mass moment of inertia,8 is closely related to the quadratic mass moment defined in §2.4.3but is taken with respect to an axis instead of a point. It is a measure of the resistance of a mass-endowed object to rotation. It plays roughly the same role in rotational dynamics as mass doesin translational dynamics. It connects related quantities such as angular momentum and angularvelocity, as well as torque and angular acceleration. There is an associated quantity called the massproduct of inertia, which completes the formation of the moment of inertia tensor, and appears intransformation equations. In the sequel the “mass” qualifier is often implied and may be omitted forbrevity; for example moment of inertia written instead of the more precise mass moment of inertia.
The mass moment of inertia of a particle of mass mi with respect to a given axis a is Ia = mi d2ai ,
where dai is the distance from the mass point to a (the perpendicular distance from a to the masspoint). See Figure 2.3(a). For a PMP system of N particles the moment of inertia is obtained bysummation:
Ia =∑
i
mi d2ai , i = 1, . . . N . (2.27)
§2.4.5. Mass Product of Inertia
Connected with moments of inertia is a quantity called the mass product of inertia. This is not veryuseful by itself, but completes the formation of the moment of inertia tensor described in the nextsubsection, and appears in its transformation equations.
The mass product of inertia of a particle of mass mi with respect to a pair of given perpendicularplanes p and q is mi dpi dqi , in which dpi and dqi are signed distances from the mass point to theplanes. See Figure 2.3(b). For a PMP system of N particles, the product of inertia is obtained bysummation:
Ipq =∑
i
mi dpi dqi , i = 1, . . . N . (2.28)
8 Also called rotational inertia, polar mass moment of inertia and angular mass
2–13

Chapter 2: PMP & LMDFE SYSTEMS: KINEMATICS 2–14
§2.4.6. Inertia Tensor
To study properties when rotation axes are not known in advance, it is convenient to introduce thesystem mass inertia tensor with respect to a RCC frame Oxyz. This tensor is fully defined by asystem mass inertia matrix. This is a symmetric 3 × 3 matrix formed by grouping mass momentsand products of inertia as
IOxyz =[ Ixx −Ixy −Ixz
−Iyx Iyy −Iyz
−Iyx −Izy −Iyz
](2.29)
in which
Ixx =∑
i
mi (y2i + z2
i ), Iyy =∑
i
mi (z2i + x2
i ), Izz =∑
i
mi (x2i + y2
i ),
Ixy = Iyx =∑
i
mi xi yi , Iyz = Izy =∑
i
mi yi zi , Izx = Ixz =∑
i
mi zi xi .(2.30)
Here xi . yi and zi are coordinates of the i th particle of mass mi ; see Figure 2.3(c).
§2.4.7. Inertia Tensor Transformations
Consider an axis a passing through the RCC frame origin O, having direction cosines ax , ay and az
with respect to x , y and z, respectively. Define the unit-vector t = [ ax ay az ]T . Then the momentof inertia with respect to a is given by
Ia = tT IOxyz t. (2.31)
Next consider a totated RCC system {a, b, c} with origin at O Construct the transformation matrix
T =[ ax bx cx
ay by cy
az bz cz
]
whose columns store the direction cosides of {a, b, c}, respectively, with respect to {x, y, z}. Thetransformed inertia tensor is
IOabc = TT IOxyz T.
The associated eigenvalue problem is Ixyzc j = I j c j . The eigenvalues I j , j = 1, 2, 3, are theprincipal moments of inertia. Since Ixyz is symmetric real, the three eigenvalues are positive. It canbe shown that Ixyz is also nonnegative, whence the eigenvalues are nonnegative. They are typicallyordered as
I1 ≥ I2 ≥ I3 ≥ 0. (2.32)
The associated eigenvectors form the principal inertia directions.
(TBC)
2–14