MECH430 Topic1 Classification
80
- + Sensor Classification MECH 430 Sensor classification Slide 1
-
Upload
bashir-el-fil -
Category
Documents
-
view
235 -
download
0
description
njh
Transcript of MECH430 Topic1 Classification

- +
Sensor Classification
MECH 430 Sensor classification Slide 1

- +
MECH 430 Sensor classification Slide 2
Physical-quantity-based taxonomy
Physical quantity
Sensor
Position & displacement
Potentiometer, LVDT, optical encoder, Hall-effect, capacitive, inductive, Eddy current, magnetoresistive, ultrasonic.
Level Capacitive, inductive, Hall effect, ultrasonic.
Proximity Capacitive, inductive, Eddy-current, IR emitter/receiver, ultrasonic, reed switches, Hall effect, magnetoresistive.

- +
MECH 430 Sensor classification Slide 3
Potentiometers
• A potentiometer (or pot) is a device used to measure linear or rotary displacement.
• The principle relies on a increase in electrical resistance with displacement.
• The pot is composed of a sliding contact + a winding

- +
MECH 430 Sensor classification Slide 4
Potentiometers • Pots can be configured in
linear or angular rotary form. • A known voltage is applied
across the total resistance and we measure the output voltage.
• The output from the sliding contact is discrete.
• Conductive plastic pots eliminate this stepwise output

- +
MECH 430 Sensor classification Slide 5
Inductors • Inductance is an effect that results
from the magnetic field that forms around a current carrying conductor.
• Inductance is a measure of the generated emf for a unit change in current.
• An inductor with an inductance of 1 Henry produces an emf of 1V when the current through the inductor changes at the rate of 1 amperes per second. V = L
didt

- +
LVDT
MECH 430 Sensor classification Slide 6
V2 = L2di2dt
+ Mdi1dt
M = N1N2P12Permeance of the space
occupied by the flux
Number of coils

- +
MECH 430 Sensor classification Slide 7
LVDT • Linear Variable Differential
Transformer (LVDT) comprises 3 coils: a primary and 2 secondaries.
• It is based on the variation in mutual inductance between the windings when a ferromagnetic core moves inside it.
• The 2 secondary coils are connected in opposition. This means at the center position the output is zero.
AC input voltage
Induced voltages Output

- +
LVDT
MECH 430 Sensor classification Slide 8

- +
MECH 430 Sensor classification Slide 9
Optical encoder • Consists of a rotating disc,
a light source, a photodetector (light sensor).
• The disc is mounted on the rotating shaft and has coded patterns of opaque and transparent slots.
• As the shaft rotates, the pattern interrupts the light, thereby generating a digital pulse → determine speed.

- +
MECH 430 Sensor classification Slide 10
http://computer.howstuffworks.com/mouse2.htm

- +
Incremental encoders • Incremental encoders track motion, velocity, and
direction. • They use 2 outputs called quadrature outputs (90
degrees out of phase)
MECH 430 Sensor classification Slide 11
Clockwise rotation Counter-clockwise rotation

- +
MECH 430 Sensor classification Slide 12
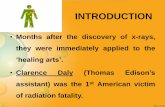
Hall-effect • The hall effect is the potential
difference (Hall voltage) on opposite sides of a sheet of conducting or semi-conducting material through which current is flowing, created by a magnetic field applied perpendicular to the Hall element.
• Lorentz force is applied on the electrons due to the magnetic field. This force causes a field (voltage) to exist in a direction perpendicular to B and I
-
+

- +
Hall effect applications
• The sensing of wheel rotation in anti-lock brakes.
• Some type of brushless DC electric motors use Hall effect sensors to detect the position of the rotor.
• Current sensor
MECH 430 Sensor classification Slide 13
VH =−IB / dne
current Magnetic
flux density
Plate thickness
Electron charge Charge carrier density of carrier electrons

- +
Hall effect - application
• For robot odometry, a hall effect quadrature encoder senses gear teeth on the driveshaft in order to measure rotation.
MECH 430 Sensor classification Slide 14

- +
Inductive displacement sensor
• Inductive sensor with ferromagnetic core causes magnetomotive force (mmf).
• The air gap causes an increase in the circuit reluctance and decrease in the flux.
• Therefore the change in distance can be quantified from a change in inductance.
MECH 430 Sensor classification Slide 15

- +
Inductive displacement sensor
MECH 430 Sensor classification Slide 16
mmf = Flux x Reluctance = Φ×ℜ (A.turns)
Φ =niℜ
(Webers)
Ψ = nΦ =n2Iℜ
(Webers)
L =Ψi=n2
ℜ (H)
• The flux of one coil may be expressed as:
• The mmf is calculated as:
• The total flux of n coils is then:
• The self inductance is then:

- +
Inductive displacement sensor
MECH 430 Sensor classification Slide 17
• But the reluctance is calculated as:
ℜ =l
µrµ0A
Total length of flux path (m)
Relative magnetic permeability (dimensionless)
Permeability of free space 4π x10-7 (H/m)
Cross-sectional area of flux path (m2)

- +
MECH 430 Sensor classification Slide 18
Capacitors
• A capacitor is an electric component capable of storing electrical energy between two metal plates separated by an insulator (dielectric).
• The units of capacitance is Farads (or µF).
V =1C
idt∫

- +
Capacitive displacement sensor
MECH 430 Sensor classification Slide 19
C(x) = ε Ax= εrε0
Ax
Dielectric constant or permittivity
Effective area of the plates in m2
Distance of the plates in m
Relative dielectric constant Dielectric constant of
vacuum 8.85(10-12) F/m

- +
Other types of capacitive displacement sensors
MECH 430 Sensor classification Slide 20
Transverse motion
Dielectric moves Differential capacitive sensor

- +
MECH 430 Sensor classification Slide 21
Eddy current • Eddy current is caused by a
moving magnetic field intersecting a conductor.
• The relative motion causes a circulating flow of electrons within the conductor.
• The eddies create magnetic fields that oppose the change in the external field.

- +
MECH 430 Sensor classification Slide 22
Magnetoresistance • Magnetoresistance is the property of some materials
to change the value of their electrical resistance when an external magnetic field is applied to them.
A Corbino disk

- +
MECH 430 Sensor classification Slide 23
Ultrasonic range sensor • Ultrasound is a sound with a frequency greater than
the upper limit of human hearing (20KHz). • Ultrasonic ranging is performed by measuring the
difference in time between the emitted and reflected wave.

- +
Ultrasound - applications
MECH 430 Sensor classification Slide 24
Medical applications Robotics

- +
MECH 430 Sensor classification Slide 25
Infra red emitter/receiver • Infra red radiation is a electromagnetic radiation of
wavelength longer than that of visible light but shorter than radio waves.

- +
MECH 430 Sensor classification Slide 26
Reed switch • The reed switch is an electrical switch operated by
applying a magnetic field. • It consists of a pair of contacts on ferrous metal reeds
in a hermetically sealed glass envelope. • The contacts can be made to open or close.
N
S

- +
Reed switch - applications
• Proximity switch • Door and window sensors in burglar alarm systems. • On bicycle wheels reed switches are used to actuate
briefly each time a magnet on the wheel passes the sensor.
MECH 430 Sensor classification Slide 27
Security system

- +
MECH 430 Sensor classification Slide 28
Physical-quantity-based taxonomy
Physical quantity
Sensor
Velocity Tachometer, potentiometer, optical encoder, or piezoelectric.
Acceleration Piezoresistive, piezoelectric, and capacitive accelerometer.
Strain Metal foil and semiconductor strain gages; piezoelectric; Moire interferometry.

- +
MECH 430 Sensor classification Slide 29
Tachometer • A tachometer determines the speed of rotation of a
shaft or disk. • Tachometers can be based on:
– Spark rate of ignition (automotive) – Hall effect (trains)

- +
MECH 430 Sensor classification Slide 30
Piezoelectric & Piezoresistance (acceleration)
• Piezoelectricity is the ability of crystals and certain ceramics to generate a voltage in response to applied mechanical stress.
• Piezoresistance is the changing electrical resistance of a material (mostly silicon) due to an applied mechanical stress.

- +
MECH 430 Sensor classification Slide 31
Strain gauge • A strain gauge is a device used to
measure the deformation of an object.
• The most common type of strain gauge (foil gauge) consists of a metallic foil pattern supported by an insulated flexible backing.
• The gauge is attached to the strained object with an adhesive.
• As the gauge deforms, its resistance changes because of the conductor’s geometry (length, thickness).

- +
MECH 430 Sensor classification Slide 32
Strain gauge • The gauge factor is given as:
GF =ΔR / RG
ε
resistance of undeformed gauge
change in resistance due to strain
strain

- +
Strain gauge
MECH 430 Sensor classification Slide 33

- +
MECH 430 Sensor classification Slide 34
Moiré interferometry • A Moiré pattern is an interference pattern when two grids are
overlaid that have different grid sizes or different orientations. • Interferometry is the science of interfering two or more waves,
such that the output wave is different from the input waves. The resultant wave can be used to study the properties of the input waves.
I1(x) = I0 ⋅ sin(2π ⋅ k1 ⋅ x)I2 (x) = I0 ⋅ sin(2π ⋅ k2 ⋅ x)
I(x) = I0 ⋅2cos(2π(k1 − k2 )2
⋅ x) ⋅ sin(2π (k1 + k2 )2
⋅ x)

- +
MECH 430 Sensor classification Slide 35
Physical-quantity-based taxonomy Physical quantity
Sensor
Pressure U-tube, Bourdon tube, Diaphragm, Capsule, Bellows, Piezoresistive, Capacitive, Moiré interferometry.

- +
MECH 430 Sensor classification Slide 36
U tube
• A U tube (liquid column manometer) compares the pressure to be measured with a reference pressure and yields a difference h of liquid level.

- +
MECH 430 Sensor classification Slide 37
Bourdon tube • A bourdon tube is a curved or twisted flattened
metallic tube with one closed end. • When pressure is applied through the open end the
tube tends to straighten. The displacement indicates the applied pressure, which yields an electric output signal.

- +
MECH 430 Sensor classification Slide 38
Diaphragm
• A diaphragm is a flexible circular plate consisting of a taut membrane that strains under the action of a pressure difference.
• A micromachined diaphragm is an etched silicon wafer with implanted gages that sense local strain.

- +
MECH 430 Sensor classification Slide 39
Bellows
• A bellows is a flexible chamber with axial elongation that undergoes deflection when a pressure is applied.
• Bellows undergoes deflections larger than capsules or diaphragms.
P
x

- +
MECH 430 Sensor classification Slide 40
Forces Physical quantity
Sensor
Force Strain gages, Piezoelectric, Load cells, Capacitive, Force Sensitive Resistor (FSR).

- +
MECH 430 Sensor classification Slide 41
Load cell • A load cell is an electronic device that transforms
force into an electrical signal. • The most common load cells are based on strain
gages. • Other types of load cells include hydraulic load cells
(increase in pressure), or piezoelectric load cells (generates a voltage).

- +
MECH 430 Sensor classification Slide 42
Force Sensitive Resistor • A Force Sensitive Resistor
(FSR) has a variable resistance as a function of applied pressure.
• As the force increases, the resistive element is deformed against the substrate.
• Air is pushed out. • The more the active area
touches the substrate, the less the resistance.

- +
MECH 430 Sensor classification Slide 43
Temperature sensors Physical quantity Sensor
Temperature Thermocouples, Thermometer, Resistance Temperature Detector (RTD), Thermistor, Thermoelectric, Thermodiode, Thermotransistor, Thermochromatic paints, Surface acoustic wave devices.

- +
MECH 430 Sensor classification Slide 44
Thermocouple • Thermocouples are used to measure the temperature
gradient between two points. • The sensor is based on the principal that any conductor
subjected to a temperature gradient, generates a voltage (thermoelectric effect).
• Thermocouples connected in series are called thermopile.

- +
MECH 430 Sensor classification Slide 45
RTD • Resistance Temperature Detectors (RTD) are
temperature sensors that exploit the predictable change in electrical resistance of conductors with changing temperature.
• Most of them are made of platinum and are therefore known as Platinum Resistance Thermometers (PRT).

- +
MECH 430 Sensor classification Slide 46
Thermistor • Thermistor comes from `thermally
sensitive resistor’ and applies to temperature-dependent resistors that are based on ceramics or polymers and not on pure metals (as is the case for RTD’s).
• RTD are useful over a high temperature range, while thermistors are more precise but work on a limited temperature range.
• They are designated as NTC when having a negative temperature coefficient and PTC when having a positive temperature coefficient.

- +
MECH 430 Sensor classification Slide 47
Light sensors Physical quantity
Sensor
Light detector Vacuum tube photosensor, Photoconductive cells photoresistor, Phototransistor, Photodiode, Photovoltaic.

- +
MECH 430 Sensor classification Slide 48
Vacuum tube photosensor • Phototsensors or photodetectors are sensors of light
or other electromagnetic energy. • A vacuum tube photosensor (phototube) is a vacuum
tube sensitive to light. • These devices operate on the photoelectric effect:
– Incoming photons strike a photocathode, generating electrons, which are attracted towards the anode, thus generating a current flow which is dependent on the frequency and intensity of incoming light

- +
MECH 430 Sensor classification Slide 49
Photoconductive cell photoresistors
• Light-Dependent Resistors (LDR) (photoresistors, photoconductors), are electronic components whose resistance decreases with increasing incident light intensity.

- +
MECH 430 Sensor classification Slide 50
Photodiode • A photodiode is a semiconductor
diode that functions as a photodetector.
• A diode is a component that allows the flow of current on one direction but blocks the other.

- +
MECH 430 Sensor classification Slide 51
Flow sensors Physical quantity Sensor Local fluid velocity:
Pitot probe, Thermal (hot wire anemometry), Laser anemometry.
Average fluid velocity:
Electromagnetic, Ultrasound: transit time, Ultrasound: doppler.
Mass flow rate: Coriolis effect, Thermal transport.

- +
MECH 430 Sensor classification Slide 52
Hot-wire anemometer • Such sensors measure the rate of heat
loss from the wire to the flowing fluid. • The heat flow rate is proportional to:
– The heat interchanging area, – ∆T, – Film coefficient of the heat transfer h.
• Determine the local fluid velocity by measuring the current to keep the wire at a specific temperature.

- +
MECH 430 Sensor classification Slide 53
Thermal transport mass flowmeter
• This sensor is a heat-transfer flowmeter, which measures the rise in temperature of fluid after a known amount of heat has been added to it.
• T1 decreases and T2 increases as the flow increases.
• ∆T is proportional to the mass flow (at low flow rates).

- +
MECH 430 Sensor classification Slide 54
Physical quantity Sensor Volume flow rate: Orifice plate,
Venturi tube, Variable area (rotameter), Pitot probe, Positive displacement, Ultrasonic

- +
MECH 430 Sensor classification Slide 55
Orifice plate in a pipe • This is an obstruction-type flowmeter, where a plate
with an orifice is placed inside a pipe. • A cross-section change causes a change of velocity.

- +
MECH 430 Sensor classification Slide 56
Flow nozzle & Venturi tube
• Flow nozzles and Venturi tubes are based on the same principle as the orifice plate but their internal shapes are not so blunt (Cd is reduced)

- +
MECH 430 Sensor classification Slide 57
Rotameter
• A rotameter consists of a uniform conic tube & conic float.
• The float is dragged to a height based on its weight and the flow.
• When the flow increases, the float rises, the pass section increases, the pressure difference between both ends is constant.

- +
MECH 430 Sensor classification Slide 58
Pitot tube (point velocity flow)
• The Pitot tube measures the velocity at a point. • The fluid rises until the pressure excreted by the fluid
column balances the force produced by the impacting velocity on the open end.

- +
MECH 430 Sensor classification Slide 59
Positive displacement
• Positive displacement flowmeters continuously separate the liquid stream into known volumes and register flow by counting the cycles or revolutions.

- +
MECH 430 Sensor classification Slide 60
Ultrasonic flowmeter • Ultrasonic flowmeters measure the difference of the
propagation time of ultrasonic pulses propagating in (normally an inclination angle around 30 to 45° is used) flow direction and against the flow direction.
Vu1
Vu2 Flow

- +
MECH 430 Sensor classification Slide 61
Acoustic sensors
Physical quantity
Sensor
Acoustic sensors Liquid microphone, Capacitive microphone, Dynamic microphone (ribbon, carbon), Laser microphone, Piezoelectric microphone.

- +
MECH 430 Sensor classification Slide 62
Liquid microphone • Bell’s liquid transmitter consists of a metal cup filled
with dilute sulfuric acid. • A sound wave causes a diaphragm to move, forcing a
brass tube to move up and down in the liquid.
• The electrical resistance between a wire and a plate located at the bottom of the cup is then inversely proportional to the length of wire submerged (or proportional to the height of water between tip and bottom).

- +
MECH 430 Sensor classification Slide 63
Capacitor microphone
• In a condenser microphone, also known as a capacitor microphone, the diaphragm acts as one plate of a capacitor, and the vibrations produce changes in the distance between the plates.

- +
MECH 430 Sensor classification Slide 64
Carbon microphone • A carbon microphone is a capsule containing carbon granules
pressed between two metal plates. • A voltage is applied across the metal plates, causing a small
current to flow through the carbon. • One of the plates, the diaphragm, vibrates in sympathy with
incident sound waves, applying a varying pressure to the carbon.
• The changing pressure deforms the granules, causing the contact area between each pair of adjacent granules to change, and this causes the electrical resistance of the mass of granules to change.
• The changes in resistance cause a corresponding change in the voltage across the two plates, and hence in the current flowing through the microphone, producing the electrical signal.

- +
MECH 430 Sensor classification Slide 65
Laser microphone
• A laser microphone consists of a laser beam that must be reflected off a glass window or another rigid surface that vibrates in sympathy with nearby sounds.
• The laser measures the distance between itself and the surface extremely accurately; the tiny fluctuations in this distance become the electrical signal of the sounds picked up.

- +
MECH 430 Sensor classification Slide 66
Piezoelectric microphone
• A piezoelectric microphone uses the effect of piezoelectricity to convert sound vibrations to an electrical signal.

- +
MECH 430 Sensor classification Slide 67
Chemical sensors Physical quantity Sensor
Chemical sensors Chemoresistor, Chemocapacitor, Chemotransistor, Chemodiode, Thermochemical, Electrochemical, Pellistor, Organic gas, pH electrodes.

- +
MECH 430 Sensor classification Slide 68
Chemoresistor, Chemocapacitor
• A chemoresistor is a resistor that changes based on a chemical effect. Each chemoresistor has a different sensitivity to different gases.
• A chemocapacitor is a capacitor that changes based on the chemical effect.

- +
MECH 430 Sensor classification Slide 69
Pellistor • Catalytic gas sensors use fine coils of platinum wire
and measure its resistance at 450oC. • The coil is embedded in a pellet of sintered alumina
powder, called a pellistor, impregnated by a catalyst.

- +
MECH 430 Sensor classification Slide 70
Pellistor • If a flammable gas contacts the catalytic surface it
becomes oxidized and burns (flameless), thus increasing the temperature of the wire and changes its resistance.

- +
Sensor classification
• Modulating • Self-generating • Analog • Digital • Deflection • Null deflection
MECH 430 Sensor classification Slide 71

- +
MECH 430 Sensor classification Slide 72
Modulating sensors
• A modulating or active sensor is a sensor that requires a separate power source in order to operate.
• Examples include LVDT, and thermistors, ultrasonic range sensor, reed switch, RTD.
• The input only controls the output (i.e., delivers no power).

- +
MECH 430 Sensor classification Slide 73
Modulating sensors • Modulating sensors have higher efficiency and tend to
produce much higher energy than self-exciting sensors.
• Modulating sensors have the advantage that the power supply voltage can modify their overall sensitivity.
Sensor (LVDT,
Potentiometer)
External drive
Input x(t) Output y(t)+yd

- +
MECH 430 Sensor classification Slide 74
Self-generating sensors • Self-generating or passive sensors yield an electric
signal from a measurand without requiring an electrical supply.
• For example a thermocouple is a self-generating thermal sensor, since it produces an emf from the difference in junction temperatures. Energy is supplied via the thermodynamic process.

- +
MECH 430 Sensor classification Slide 75
Self-generating sensors • Self-generating sensors produce very low output
power signals, which often needs amplification to a useful level.
• Self-generating sensors require less wires than modulating sensors because the same wires deliver the signal and power.
Sensor (Piezoelectric, Photovoltaic,
Thermoelectric)
Self-exciting
Input x(t) Output y(t)

- +
MECH 430 Sensor classification Slide 76
Analog sensors
• In analog sensors the output changes in a continuous way at a macroscopic level.
• Sensors are predominately analog devices that generate analog signals.
• Analog signals must be converted to digital bits before they can be stored by a computer.

- +
MECH 430 Sensor classification Slide 77
Digital sensors • Digital sensors generate digital signals that can be
directly interfaced to a computer. • Some pre-processing is usually involved in the sensor
electronics to obtain a digital output. • An example of a digital sensor is the optical encoder,
whose output consists of several bits representing the angular velocity of the shaft.

- +
MECH 430 Sensor classification Slide 78
Deflection sensors
• In deflection sensors, the measured quantity produces a physical effect that generates in some part of the instrument a similar but opposing effect that is related to some useful variable.
• For example, a dynamometer to measure force is a sensor where the force to be measured deflects a spring to the point where the force the spring exerts, proportional to its deformation, balances the applied force.

- +
MECH 430 Sensor classification Slide 79
Null-Deflection sensors • Null-type sensors prevent deflection from the null
point by applying a known effect that opposes that produced by the quantity being measured.
• There is an imbalance detector and some means to restore balance.
• Take the weighing scale as an example.

- +
MECH 430 Sensor classification Slide 80
Deflection vs. Null-Deflection
• Null measurements are usually more accurate than deflection sensors because the imbalance detector only measures near zero. Therefore it can be very sensitive and does not require calibration.
• The disadvantage of null measurements are that they are slow.