Matrices
30
METODOS NUMERICOS EN INGENIERIA MATRICES Y SISTEMAS DE ECUACIONES FABIAN PINTO MEIBY TOLEDO ANDRES PLATA ELIANA GOMEZ JONATHAN BUDEZ ROBINSON MANCILLA UNIVERSIDAD INDUSTRIAL DE SANTANDER INGENIERIA DE PETROLEOS Bucaramanga, Mayo de 2010
-
Upload
julian-gutierrez -
Category
Documents
-
view
2.264 -
download
0
Transcript of Matrices

METODOS NUMERICOS EN INGENIERIA
MATRICES Y SISTEMAS DE ECUACIONES
FABIAN PINTO
MEIBY TOLEDO
ANDRES PLATA
ELIANA GOMEZ
JONATHAN BUDEZ
ROBINSON MANCILLA
UNIVERSIDAD INDUSTRIAL DE SANTANDER
INGENIERIA DE PETROLEOS
Bucaramanga, Mayo de 2010

METODOS NUMERICOS EN INGENIERIA
MATRICES Y SISTEMAS DE ECUACIONES
FABIAN PINTO
MEIBY TOLEDO
ANDRES PLATA
ELIANA GOMEZ
JONATHAN BUDEZ
ROBINSON MANCILLA
DOCENTE. EDUARDO CARRILLO
UNIVERSIDAD INDUSTRIAL DE SANTANDER
INGENIERIA DE PETROLEOS
Bucaramanga, Mayo de 2010

METODOS NUMERICOS EN INGENIERIA
MATRICES Y SISTEMAS DE ECUACIONES
MATRIZ TRIANGULAR.
En álgebra lineal, una matriz triangular es un tipo especial de matriz cuadrada
cuyos elementos por encima o por debajo de su diagonal principal son cero.
Debido a que los sistemas de ecuaciones lineales con matrices triangulares son
mucho más fáciles de resolver, las matrices triangulares son utilizadas en análisis
numérico para resolver sistemas de ecuaciones lineales, calcular inversas y
determinantes de matrices. El método de descomposición LU permite
descomponer cualquier matriz invertible como producto de una matriz triangular
inferior L y una superior U.
Una matriz cuadrada de orden n se dice que es una MATRIZ TRIANGULAR SUPERIOR si es de la forma:
Análogamente, se dice que es una MATRIZ TRIANGULAR INFERIOR, si es de una matriz de la forma:

Ejemplos.
MATRIZ TRIANGULAR SUPERIOR MATRIZ TRIANGULAR INFERIOR.
MATRIZ TRANSPUESTA.
Si tenemos una matriz (A) cualquiera de orden m x n entonces su transpuesta es
otra matriz (A) de orden n x m donde se intercambian las filas y las columnas de la
matriz (A). La transpuesta de una matriz se denota por el símbolo “T”, así es pues
que la transpuesta de la matriz A se representa AT.
Esto es por ejemplo una matriz b es la transpuesta de una matriz (AT=B) si cada
Bij = Aij y viceversa.
(A t) t = A
(A + B) t = A t + B t
(α ·A) t = α · A t
(A · B) t = B t · A t

MATRIZ SIMETRICA.
Una matriz de elementos:
Entonces una matriz simétrica es una matr iz cuadrada que veri f ica que su t ranspuesta es igual.
A = A t .

MATRIZ INVERSA
La matriz inversa de A es otra matriz que representamos por A -1 y que verifica:
Solamente tienen inversa las matrices cuadradas cuyo determinante es distinto de cero.
PROPIEDADES DE LA MATRIZ INVERSA
La inversa del producto de dos matrices es el producto de las inversas cambiando el orden.
Ejemplo:
Cálculo de la inversa de la matriz:
Para calcular la inversa, primero calculamos el determinante:

Después calculamos cada uno de los adjuntos:
Y por tanto:
Comprobación.

DETERMINANTE
El determinante es una función que le asigna a una matriz de orden n, un único número real llamado el determinante de la matriz. Si A es una matriz de orden n, el
determinante de la matriz A lo denotaremos por det(A) o también por (las barras no significan valor absoluto).
DETERMINANTE DE UNA MATRIZ DE ORDEN 1.
Si es una matriz de orden uno, entonces det(A)=a.
Ejemplo 1:
Si
, entonces det(A)=-2 o
Si
, entonces det(A)=0 o
Si
, entonces det(A)=2 o
MENORES Y COFACTORES DE UNA MATRIZ DE ORDEN N.
Sea A una matriz de orden , definimos el menor asociado al elemento de A como el determinante de la matriz que se obtiene al eliminar la fila i y la
columna j de la matriz A. El cofactor asociado al elemento de A esta dado por:
.
Ejemplo 2:

Sea
el menor asociado a a11.
el menor asociado a a12.
el menor asociado a a21.
el menor asociado a a22.
el cofactor asociado al elemento a11.
el cofactor asociado al elemento a12.
el cofactor asociado al elemento a21.
el cofactor asociado al elemento a22.
DETERMINANTE DE UNA MATRIZ DE ORDEN SUPERIOR.
Si A es una matriz de orden , entonces el determinante de la matriz A es la suma de los elementos de la primera fila de A multiplicados por sus respectivos cofactores.
Ejemplo 3:
Hallar el determinante de la matriz
Calculamos los cofactores para esta matriz A, y entonces se tiene que:
Ejemplo:

Hallar el determinante de la matriz
Para encontrar el menor se elimina el primer renglón y la primera columna de A y se calcula el determinante de la matriz resultante.
De manera similar, para encontrar el menor , se elimina el primer renglón y la segunda columna de A0 y se calcula el determinante de la matriz resultante.
Para encontrar el menor , se elimina el primer renglón y la tercera columna de A.
Los cofactores son:
El determinante de la matriz A se calcula así:
Sea:

Calcular el determinante de A desarrollándolo por la primera fila.
Calcular el determinante de A desarrollando por la tercera fila.

Calcular el determinante de A desarrollando por la primera columna.
Calcular el determinante de A desarrollando por la segunda columna.

MATRIZ BANDEADA
Tales matrices se caracterizan por tener un número muy importante de elementos
nulos en relación al número total de coeficientes de la matriz (n2) y porque
además, esos elementos no nulos se ubican a lo ancho de una “banda” paralela a
la diagonal de la matriz.
Se denomina precisamente “ancho de banda” al número de columnas distribuidas
en forma simétrica a la diagonal, por fuera de la cual, los coeficientes de la matriz
son nulos.
Tales matrices son muy comunes en problemas de ingeniería en los cuales se
realiza el planteo numérico de las ecuaciones diferenciales de gobierno de un
problema físico determinado.
Ejemplo: Matriz “banda” de 8 x 8. Ancho de banda=5
a11 a12 a13 0 0 0 0 0
a21 a22 a23 a24 0 0 0 0
a31 a32 a33 a34 a35 0 0 0
0 a42 a43 a44 a45 a46 0 0
0 0 a53 a54 a55 a56 a57 0
0 0 0 a64 a65 a66 a67 a68
0 0 0 0 a75 a76 a77 a78
0 0 0 0 0 a86 a87 a88
donde, generalmente, aij = aji
Si bien sistemas de ecuaciones con matrices de coeficientes de este tipo,
denominadas habitualmente esparzas o vacías, resultan a menudo resueltos
mediante técnicas iterativas, resulta de interés encarar su solución directa
mediante una adaptación del algoritmo enunciado para matrices simétricas, en el
punto 1.2.3.4.
Esa adecuación surge de advertir que, para cada columna, los elementos
ubicados por debajo de la banda ya son nulos, por lo cual, las operaciones de

eliminación pueden limitarse al ancho de banda. Esto es, para obtener la matriz
triangular superior:
Repetir k=1,... n-1
si k+b>n
fin =n
Sino
fin =k+b
Fin_si
Repetir i=k+1,... fin
m = aki/akk
Repetir j=i,... fin
aij = aij – m. akj
Fin j
bi = bi – m.bk
Fin i
Fin k
En donde “b” es el semiancho de banda. En el algoritmo anterior se agregó una
estructura alternativa a fin de determinar correctamente la finalización de cada uno
de los lazos repetitivos.
Debe notarse que, de la forma en que se ha organizado el procedimiento, la matriz
triangular superior obtenida mantiene los elementos no nulos dentro de la “banda”
por lo cual, la rutina de sustitución hacia atrás puede re-escribirse como:
xn = bn/ann

Repetir i=n-1,.... 1
si i+b>n
fin =n
Sino
fin =i+b
Fin_si
s=0
Repetir j=i+1,... fin
s = s + aij.xj
Fin j
xi = (bi-s)/aii
Fin i
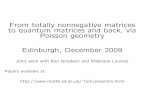
NUMERO DE OPERACIONES
El número de operaciones
necesarias para la solución de un
sistema determinado dependerá,
además del orden de la matriz, de
la magnitud del ancho de banda.
En el gráfico siguiente se muestra
la relación existente entre el
ancho de banda, expresado como
porcentaje del orden de la matriz
y la relación entre el número de
operaciones contempladas en el
algoritmo anterior y el
procedimiento de Gauss estándar.
Gauss Banda Simétrico vs Gauss Estándar
0
2
4
6
8
10
12
14
16
18
0 5 10 15 20 25 30 35 40
b/n [%]
Nº
Op
. G
SB
/GE [
%]
n=1000 n=100 n=200

En la misma se representaron las relaciones mencionadas para distintos valores
del orden del sistema de ecuaciones, observándose que, cuando n>200, la
eficiencia del algoritmo se hace aproximadamente constante para una cierta
relación entre el ancho de banda y el orden de la matriz (b/n).
Es importante notar que en sistemas provenientes de la solución numérica de
ecuaciones diferenciales en problemas de ingeniería, es frecuente encontrar
relaciones b/n del orden del 10 a 20 %, rango en donde la eficiencia del algoritmo
GBS permite realizar entre 20 y 50 veces menos operaciones que Gauss
estándar.
EJEMPLOS DE MATRICES BANDEADAS.
Un gran número de sus componentes son cero:
En álgebra lineal, una matriz diagonal es una matriz cuadrada en que las entradas son todas nulas salvo en la diagonal principal, y éstas pueden ser nulas o no. Así, la matriz D = (di,j) es diagonal si:
Ejemplo:
Toda matriz diagonal es también una matriz simétrica, triangular (superior e inferior) y (si las entradas provienen del cuerpo R o C) normal.
Otro ejemplo de matriz diagonal es la matriz identidad.
El caso más sencillo de diagonalización corresponde a matrices tridiagonales de la forma

Estas matrices tienen propiedades que hacen que el cálculo de autovalores y autovectores sea más sencillo. En primer lugar, el determinante de la
matriz tridiagonal es equivalente a la ecuación polinomial
, que puede obtenerse mediante la recursión:
En principio, se podría usar una rutina de búsqueda de ceros para obtener las
raíces de Sin embargo, este polinomio tiene las siguientes propiedades
1. Todas las raíces de se encuentran en el intervalo
donde está definido como:

2. El número de raíces de con esta dado por el número de
acuerdos de los signos de y para Si por
ejemplo, se le asigna el signo del polinomio precedente
. Es evidente que utilizando estas dos propiedades, es posible diseñar un algoritmo numérico que encuentre los autovalores utilizando el método de bisección. Una vez obtenidos los autovalores, el problema de obtener los autovectores se reduce a resolver un sistema de ecuaciones para cada autovalor obtenido.
El sistema de ecuaciones representadas matricialmente para encontrar su solución es
Ax = b (3.5)
Reordenando se tiene
Ax – b = 0
Una ecuación vectorial de f(x) = 0 (3.6)
Aplicando el método iterativo de punto fijo , la ec.(3.6) puede arreglarse de tal forma que:
X = g(x)
X = Bx + C B = matriz (3.7) C = vector de las constantes
Se requiere de un vector inicial x(0) como primera aproximación al vector solución x

Dado el sistema:
Con a11, a22, a22, diferentes de cero Se despeja X1 de la Ec. 1 Se despeja X2 de la Ec. 2 Se despeja X3 de la Ec. 3
Que en notación matricial queda:

SUMA DE MATRICES.
Proceso de combinar dos o más matrices en una matriz equivalente, representado
por el símbolo +.
La suma de matrices sólo se puede efectuar entre matrices con la misma
dimensión, es decir, las que tienen el mismo número de filas y el mismo número
de columnas. La matriz resultante tiene las mismas dimensiones, cada uno de
cuyos elementos es la suma aritmética de los elementos en las posiciones
correspondientes en las matrices originales.
Si las matrices A = (a i j) y B = (b i j) tienen la misma dimensión, la matriz
suma es:
A+B = (a i j+b i j)
La MATRIZ SUMA se obtiene sumando los elementos de las dos
matrices que ocupan la misma posición.
PROPIEDADES DE LA SUMA DE MATRICES.
INTERNA: La suma de dos matrices de orden m x n es otra matriz
dimensión m x n.
ASOCIATIVA: A + (B + C) = (A + B) + C
ELEMENTO NEUTRO: A + 0 = A
Donde O es la matriz nula de la misma dimensión que la matriz A.
ELEMENTO OPUESTO: A + (−A) = O
La matriz opuesta es aquella en que todos los elementos están
cambiados de signo.
CONMUTATIVA: A + B = B + A

Ejemplos:
1.1 A = B =
A + B =
1.2 C = D =
C + D =

MULTIPLICACIÓN DE MATRICES.
El producto de matrices requiere de una condición previa muy restrictiva: si A y B
son dos matrices, podrán multiplicarse sólo en el caso de que el número de
columnas de la primera matriz coincida con el número de filas de la segunda. Se
dice en este caso que A y B son multiplicables. Es decir, si tenemos una matriz
2 x 3 y la multiplicamos por otra de orden 3 x 5, la matriz resultante será de orden
2 x 5. Asi: (2 x 3) x (3 x 5) = (2 x 5).
Dos matrices A y B son multiplicables si el número de columnas de
A coincide con el número de filas de B.
Mm x n x Mn x p = M m x p
El elemento c i j de la matriz producto se obtiene multiplicando cada
elemento de la fila i de la matriz A por cada elemento de la columna
j de la matriz B y sumándolos.
PROPIEDADES DE LA MULTIPLICACIÓN DE MATRICES
ASOCIATIVA: A · (B · C) = (A · B) · C
ELEMENTO NEUTRO: A · I = A
Donde I es la matriz identidad del mismo orden que la matriz A.
NO ES CONMUTATIVA: A · B ≠ B · A
DISTRIBUTIVA DEL PRODUCTO RESPECTO DE LA SUMA:
A · (B + C) = A · B + A · C

Ejemplos:
1.1 A * B = *
A * B =
1.2 C * D =
C * D =

METODOS PARA LA SOLUCION DE ECUACIONES
METODO GRAFICO.
El método grafico es apropiado para dar solución a pequeños sistemas de ecuaciones simultaneas (n < = 3), estos sistemas no requieren del uso de una computadora para su desarrollo. Para dos ecuaciones se puede obtener una solución al graficarlas en coordenadas cartesianas con un eje que corresponda a x1 y el otro a x2. Debido a que estos sistemas lineales, cada ecuación se relaciona con una línea recta lo cual se ilustra fácilmente mediante las ecuaciones generales:
A11X1 +A12X2=B1
A21X1 +A22X2=B2 En ambas ecuaciones podemos despejar X2:
X2= -{A11/A12) X1+B1/A12
X2= -{A21/A22) X1+B2/A22
De esta forma, las ecuaciones ahora están en forma de líneas rectas; es decir X2= (pendiente)*X1+intersección. Tales líneas se grafican en coordenadas cartesianas con X2 como la coordenada y X1 como la abscisa. Los valores de X1 y X2 en la intersección de las líneas representa la solución.

PARA TRES ECUACIONES SIMULTÁNEAS.
Cada ecuación se representa como un plano en un sistema de coordenadas
tridimensional. El punto donde se intersectan los tres planos representa la
solución. Para más de tres incógnitas, los métodos gráficos no funcionan y,
por consiguiente, tienen poco valor práctico para resolver ecuaciones
simultáneas.

REGLA DE CRAMER.
La REGLA DE CRAMER s i rve para resolver s istemas de ecuaciones l ineales. Se apl ica a s istemas que cumplan las dos condiciones siguientes:
El número de ecuaciones es igual a l número de incógnitas .
El determinante de la matr iz de los coef ic ientes es distinto de cero .
Tales sistemas se denominan sistemas de Cramer .
Sea Δ e l determinante de la matr iz de coef ic ientes.

Y sean:
Δ 1 , Δ 2 , Δ 3 . . . , Δ n
Los determinantes que se obt iene al sust i tu ir los coef ic ientes del 2º miembro ( los términos independientes) en la 1ª columna, en la 2ª columna, en la 3ª columna y en la enésima columna respect ivamente.
Un sistema de Cramer t iene una sola solución que viene dada por las s iguientes expresiones:

Ejemplo.


![[PPT]Tema 2.- MATRICES - Open Course Ware Moodle 2.5 · Web viewMATRICES PRODUCTO DE MATRICES POTENCIAS NATURALES DE MATRICES CUADRADAS MATRICES SUMA DE MATRICES. PRODUCTO DE UN ESCALAR](https://static.fdocuments.us/doc/165x107/5c17a16c09d3f2c7368c2ad2/ppttema-2-matrices-open-course-ware-moodle-25-web-viewmatrices-producto.jpg)