M A N U S C R I P T R E M O V E D - UAB...ASME Early Career Technical Journal . 2010 ASME Early...
42
M A N U S C R I P T R E M O V E D ASME 2010 Early Career Technical Journal, Vol. 9 49
Transcript of M A N U S C R I P T R E M O V E D - UAB...ASME Early Career Technical Journal . 2010 ASME Early...
-
M A N U S C R I P T
R E M O V E D
ASME 2010 Early Career Technical Journal, Vol. 9 49
-
M A N U S C R I P T
R E M O V E D
ASME 2010 Early Career Technical Journal, Vol. 9 50-56
-
M A N U S C R I P T
R E M O V E D
ASME 2010 Early Career Technical Journal, Vol. 9 57-65
-
ASME Early Career Technical Journal 2010 ASME Early Career Technical Conference, ASME ECTC
October 1 – 2, Atlanta, Georgia USA
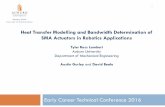
PERFORMANCE ANALYSIS OF MICRO GAS TURBINE FUELED BY BLENDS OF BIODIESEL AND PETROLEUM-BASED DIESEL
Farshid Zabihian Ryerson University
Toronto, Ontario, Canada
Hsiao-Wei D. Chiang National Tsing Hua University
Hsinchu, Taiwan
ABSTRACT Micro gas turbines are an alternative to
conventional power generation in many applications. On
the other hand, biodiesel is a renewable alternative for
petroleum-based diesel. The objective of this work is to
evaluate the performance of a 100 kW micro gas turbine
fueled by the blends of biodiesel and petroleum-based
diesel. The concentration of biodiesel in the fuel was
10%, 20%, and 30% (mass-based). The engine was
modified by mounting various sensors to monitor and
record system performance parameters, such as shaft
rotational speeds, pressure, temperatures, and flow rates
at various locations as well as output power, ambient
conditions, and exhaust stream composition. The results
indicated that some parameters, such as system electrical
efficiency, compressor rotational speed, and exhaust
stream temperature, were slightly influenced by changes
in the fuel composition. Some parameters were affected
significantly, such as compressor pressure ratio and both
mass and volumetric flow rate of fuel. Also, the changes
in turbine inlet temperature strongly depended on the
output power.
INTRODUCTION Micro gas turbines (MGTs) are gas turbines with the
power generation capacity of lower than 1 MW. There is
no universally accepted output power range for MGT,
and various references reported different ranges, such as
between 30 to 350 kW (Aras & Balli, 2008) or 25 to
1000 kW (U.S. Department of Energy, 2000). However,
a power range of 10 to several hundred kilowatts seems
reasonably wide enough to cover all MGTs. Due to their
compact size and relatively low costs, MGTs are suitable
for some applications, such as distributed and residential
power generation, peak shaving, uninterrupted
generation, back-up power, mechanical drive, premium
power, remote power, and combined heat and power
(CHP) or combined cooling, heat and power (CCHP).
Micro turbine’s development has started in the 1940’s for
automotive and transportation applications. Later, their
applications shifted toward distributed, mobile, and
military electric power generation.
The most common configuration of MGTs consists
of a compressor, turbine, and generator connected by a
single shaft and a combustor where almost all types of
fuel can be combusted (Aras & Balli, 2008). They are
usually equipped with a regenerator (recuperator) to
recover thermal energy from the turbine exhaust stream
and increase inlet air temperature to the combustor,
which results in lower fuel consumption and significantly
higher efficiency. The regenerator can be rotating or
stationary (parallel ducts). The rotating regenerators are
usually more compact and efficient. They can be made of
metal or ceramic. The rotating regenerators can suffer
from leakage between hot and cold gas streams. The
sealing problem can be intensified by deformation
caused by temperature gradient between the hot and cold
faces in the metallic disks. On the other hand, the
ceramic disks expansion is almost negligible, so their
sealing is simpler. The rotating regenerators can be
driven by applying torque either at rim or centre (Chiang
et al., 2007). It should be noted that some companies
have developed dual-shaft systems and cycles with no
heat recovery system. Chiang et al. (2007) compared the
specifications and configurations of some of the
commercially available micro turbines. The electrical
efficiency of between 23% to 33% for the system with
regenerator and around 15% without regenerator has
been reported (Chiang et al., 2007).
Alan S. Fung Ryerson University
Toronto, Ontario, Canada
ASME 2010 Early Career Technical Journal, Vol. 9 66
-
To improve the performance of micro turbine and/or
reduce their environmental impacts, several approaches
have been proposed, such as utilization of micro turbines
in combined cooling, heat, and power (CCHP) plants
(Popovic, 2002); hybrid solid oxide fuel cell and MGT
cycles (Song et al., 2005), and biodiesel fueled MGTs
(Chiang et al., 2009).
Biofuels, such as biodiesel, are environmentally
friendly alternatives for conventional fossil fuels. They
can be driven from renewable resources, such as
vegetable oils or animal fat. Their advantages can be
enumerated as: very low emissions (especially when the
life cycle emissions are taken into account), easy to use
in conventional engines, nontoxic, biodegradable,
improved lubricity, and free of sulfur and aromatics
(Chiang et al., 2009). However, biodiesel’s heating value
is lower than that of petroleum-based diesel, and it
suffers from poor cold flow performance, due to higher
viscosity, density, and speed of sound, which may cause
some problems in injection system (Karra et al., 2008).
Also, it has been reported that NOx emission increase in
biodiesel fueled engines (Senatore et al., 2000; Li, 2010).
Biodiesel can be used alone or can be blended with
petroleum diesel at any level to form a biodiesel blend.
The “B” factor is an internationally accepted system,
which refer to percentage of biodiesel in biodiesel blend
(mass-based). For instance, B30 refers to a blend with
30% biodiesel and 70% petroleum-based diesel and
B100 refers to a pure biodiesel. Blend biodiesel,
particularly with the low concentration of biodiesel
(
-
a b
c d
e f
Figure 2: Major components of the micro gas turbine a) compressor b) compressor turbine c) compressor diffuser d) combustion chamber e)
ceramic regenerator disk f) generator
The micro turbine manual control system and start-
up sequence were explained in Chiang et al. (2007). In
order to control the system, the turbine inlet temperature,
the speed of compressor and power turbines, variable
power turbine nozzle guide vane schedule, lubricant and
exhaust gas temperature are monitored. Figure 4
illustrates the schematic of the system components and
material streams. The system design specifications are
presented in Table 2.
The MGT set testing facility (Figure 5, a) includes a
Teledyne RGT-3600 micro gas turbine generator set
(Figure 1), a three-phase AC 100 kW generator (Figure
2, f), a load bank to simulate the load (Figure 5, b), and
instruments to measure engine critical parameters as well
computer-based data acquisition system to record the
measured parameters at sample rate of 1 Hz per channel.
Figure 3: Flow pattern for twin rotating disk
regenerator micro gas turbine (Chiang et al., 2009)
Figure 4: Schematic of the micro gas turbine
components and material streams (Chiang et al., 2007)
Table 2: Micro gas turbine (RGT-3600) measured specifications
Parameters Measured
data
Max compressor speed (rpm) 38,000
Power turbine speed (rpm) 26,100
Generator speed (rpm) 3,000
Regenerator speed (rpm) 14.5
Max power (kW) 100
Max fuel consumption (L/min) 1.3
Max air flow rate (kg/sec) 2.0
Max combustor exit temperature (°C) 1035
Max exhaust stream temperature (°C) 330
Max compressor pressure ratio 4.1
Compressor isentropic efficiency (%) 80
Turbine isentropic efficiency (%) 88
Regenerator effectiveness (%) 89
Engine weight (kg) 816
ASME 2010 Early Career Technical Journal, Vol. 9 68
-
a b
Figure 5: a) The micro gas turbine set testing facility b) The load bank
a b
c d
e f
g
h i
j k
Figure 6: Measuring instrument locations (Li, 2010) a) compressor shaft rotational speed (N1) b)
accessory gear shaft speed (NAC) c) compressor outlet pressure (P3) d) combustor outlet stream temperature (T4) e) exhaust stream temperature
(T7) f) fuel volumetric flow rate (W f) g and h) compressor inlet air mass flow rate (Wa) i) ambient pressure (P0) j) ambient temperature and relative
humidity (T0 and RH0) k) exhaust stream composition
In order to measure and record the required parameters,
including temperature, pressure, flow rate, and rotational
speed at different locations in the cycle, the MGT was
modified to mount various sensors and instruments. The
measured parameters in the test engine are as follows:
compressor shaft rotational speed (N1, Figure 6, a),
power turbine shaft rotational speed (N2, Figure 6, b),
generator shaft rotational speed (NOS, Figure 6, b),
compressor outlet pressure (P3, Figure 6, c), combustor
outlet stream temperature (turbine inlet temperature, T4,
Figure 6, d), exhaust stream temperature (T7, Figure 6,
e), fuel volumetric flow rate (Wf, Figure 6, f),
compressor inlet air mass flow rate (Wa, Figure 6, g and
h), output power, ambient temperature, pressure, and
relative humidity (T0, P0, and RH0, Figure 6, i and j),
and exhaust stream composition (Figure 6, k). The
exhaust stream analyzer was HORIBA MEXA-584 L,
MEXA-584L and was capable of measuring carbon
monoxide, carbon dioxide, hydrocarbons, and nitrogen
oxides. Table 3 presents the sensor specifications and location for these parameters.
ASME 2010 Early Career Technical Journal, Vol. 9 69
-
Table 3: Instruments specifications (Chiang et al., 2009)
Sensor Location Detect
property Accuracy Range Note
Remote optical
sensor Compressor inlet
Compressor shaft
speed (N1) ±0.1% 0 to 50,000 rpm
Remote optical
sensor Accessory gear
Accessory gear
shaft speed (NAC) ±0.1% 0 to 10,000 rpm
To calculate
power turbine
(N2) and
generator (NOS)
shaft speed
Pressure
transducer
Compressor
discharge
chamber
Compressor
discharge static
pressure (P3)
±0.13 psig 0 to 100 psig
Flow meter
Combustion
chamber fuel
inlet
Fuel volumetric
flow rate (Wf ) ±10 c.c. 0.1 to 2 L/min
K type
thermocouple
Combustion
chamber exit
Combustor exit
temperature (T4) ±1% 0 to 1250°C 4 probes average
K type
thermocouple Exhaust duct
Regenerator outlet
temperature (T7) ±1% 0 to 400°C 2 probes average
Pressure
transducer Bellmouth throat
Compressor inlet
static pressure (P2) ±20 Pa 0 to 10000 Pa
To calculate
inlet air mass
flow rate (Wa)
Barometer Generator side Ambient pressure
(P0) ±30 Pa 800 to 1,060 kPa
Humidity and
temperature
transducer
Generator side
Ambient humidity
and temperature
(RH0,T0)
±0.3°C (T0)
±1.5% (RH0)
-40 to 180°C (T0)
0 to 100% (RH0)
Diagrams in Figure 7 and Figure 8 illustrate some
sample measurements from the test set when the engine
is fueled by B10 (Chiang, 1995). Figure 7 shows the
compressor, power turbine, and generator shaft rotational
speed (N1, N2, and NOS, respectively); air mass flow
rate; and compressor outlet pressure (P3) of the system in
idle condition and with output power of 25, 47, 69, 89,
and 98 kW. Similarly, Figure 8 shows the turbine inlet
temperature (T4), exhaust stream temperature (T7),
compressor inlet air mass flow rate, and ambient
temperature (T0).
Figure 7: The compressor, power turbine, and generator shaft rotational speed; air mass flow rate; and compressor outlet pressure for various output powers when the system was fueled by B10 (Chiang, 1995)
0 120 240 360 480 600 720 840Time (seconds)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
Air F
low
Rat
e (k
g/s)
0
3000
6000
9000
12000
15000
18000
21000
24000
27000
30000
33000
36000
39000
Spee
d (R
PM)
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
Com
pres
sor P
ress
ure
Ratio
(P3
atm
)
N1 N2 P3 Air flow NOS
0 kWStart 25 kW 47 kW 69 kW 89 kW 98 kW
ASME 2010 Early Career Technical Journal, Vol. 9 70
-
Figure 8: The turbine inlet temperature, exhaust stream temperature, compressor inlet air mass flow rate, and ambient temperature for various output powers when the system was fueled by B10 (Chiang, 1995)
In order to conduct the experiments, the MGT was
fueled by 3 biodiesel blends: B10, B20, and B30. For
each fuel, the external load was varied from idle to full
load (0, 25, 48, 69, 89, and 98 kW). The biodiesel was
manufactured by the Taiwan NJC Corporation. The
characteristics of the biodiesel were according to ASTM
D6751 standard (Table 1).
The summary of experimental results, including fuel
and air flow rate, pressure ratio, turbine inlet
temperature, exhaust temperature, electrical efficiency,
and ambient conditions, are shown in Table 4.
Table 4: The summary of experimental results from the micro gas turbine system (Chiang, 1995; Li, 2010)
Power
(kW)
Fuel
type
Fuel
volumetric
flow rate
(L/min)
Air
mass
flow
rate
(kg/s)
Pressure
ratio
Turbine
inlet
temperature
(°C)
Exhaust
temperature
(°C)
Thermal
efficiency
(%)
Ambient
temperature
(°C)
Ambient
pressure
(kPa)
0
B10 0.899 1.789 3.172 851.5 252.9 0.000 30.3 99.956
B20 0.918 1.782 3.169 850.6 251.7 0.000 30.6 100.101
B30 0.927 1.797 3.204 853.4 254.2 0.000 32.6 100.393
25
B10 0.953 1.802 3.245 863.6 270.4 4.205 32.8 99.955
B20 0.981 1.806 3.256 870.4 271.6 4.124 32.3 100.096
B30 0.990 1.821 3.275 869.9 271.7 4.122 31.8 100.386
48
B10 1.098 1.876 3.453 914.3 284.9 7.006 35.1 99.939
B20 1.110 1.867 3.434 918.8 286.6 6.998 35.1 100.077
B30 1.136 1.902 3.489 916.6 285.7 6.899 32.6 100.377
69
B10 1.117 1.853 3.457 932.4 301.3 9.906 38.0 99.923
B20 1.135 1.856 3.467 934.1 303.3 9.833 38.0 100.059
B30 1.170 1.900 3.522 930.7 299.3 9.631 32.1 100.362
89
B10 1.173 1.826 3.478 970.8 316.3 12.162 40.9 99.906
B20 1.200 1.853 3.517 967.3 318.4 12.001 39.7 100.040
B30 1.205 1.873 3.525 956.7 313.1 12.063 34.2 100.337
98
B10 1.219 1.848 3.554 988.5 325.7 12.891 41.0 99.879
B20 1.226 1.841 3.529 993.7 326.1 12.935 41.9 100.016
B30 1.249 1.905 3.624 966.3 324.5 12.811 36.2 100.315
0 120 240 360 480 600 720 840Time (seconds)
0
100
200
300
400
500
600
700
800
900
1000
Tem
pera
ture
(C)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
Fuel
Flo
w Ra
te (L
/min
)
T4 T7 T0 fuel flow
0 kWStart 25 kW 47 kW 69 kW 89 kW 98 kW
ASME 2010 Early Career Technical Journal, Vol. 9 71
-
The diagrams in Figure 9 to 12 show how the
performance parameters of the MGT are influenced by
fuel type. In these diagrams, for constant output power,
the parameter variations are investigated for three fuels;
B10, B20, and B30. The data for these diagrams were
provided by Chiang (1995) and Li (2010). Figure 9
shows that the electrical efficiency of the system slightly
reduces when the concentration of biodiesel increases in
the fuel. Also, the efficiency of the cycle reduces with
reduction in the output power due to lower efficiency of
the components at partial loads.
Figure 9: MGT electrical efficiency vs. fuel type for
constant output power
Figure 10 (a) shows the variation of fuel flow rate
and indicates that the fuel volumetric flow rate increases
with the higher percentage of biodiesel in the fuel. In
order to investigate this diagram, the variations of the
fuel density and its heating value should be considered.
As mentioned in the introduction, Figure 10 (b)
illustrates that mass and volumetric lower heating value
(LHV) reduces and density increases with the increase of
the concentration of biodiesel in the blend fuel (based on
the data from Chiang (1995)). These two effects, increase
in density and reduction of heating value, affect the fuel
volumetric flow rate in opposite directions. According to
Figure 9, the electrical efficiency of the MGT slightly
reduces; therefore, for a particular output power, the
energy content of inlet fuel should only increase slightly.
This can be seen in Figure 10 (c), where the graph shows
that the energy content of inlet fuel (kJ/sec) slightly
increases with the increase in the biodiesel content of the
fuel. Since the heating value of the fuel decreases, the
fuel mass and volumetric flow rate should increase. On
the other hand, increase in density results in decrease in
volumetric flow rate. But, Figure 10 (d) shows that mass
flow rate of the inlet fuel increases, which means the
effect of decrease in fuel heating value overtakes the
effect of increase in the fuel density.
a
b
c
d
Figure 10: Diagrams to investigate the variation of the inlet fuel flow rate a) the inlet fuel volumetric
flow rate b) the fuel lower heat value and density vs. the biodiesel content of fuel blend c) the energy
content of inlet fuel d) the inlet fuel mass flow rate
Figure 11 (a) shows changes in the air mass flow
rate versus fuel type for constant output power in the
3
5
7
9
11
13
15
B10 B20 B30
Eff
icie
ncy
(L
HV
, %)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
0.8
0.9
1.0
1.1
1.2
1.3
B10 B20 B30
Fu
el f
low
ra
te (
L/m
in)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
800
810
820
830
840
850
860
870
880
0
5
10
15
20
25
30
35
40
45
50
B0 B10 B20 B30 B40 B50 B60 B70 B80 B90 B100
Den
sity
Hea
tin
g v
alu
e
Fuel type
LHV (MJ/kg)LHV (MJ/L)density (kg/m^3)
500
550
600
650
700
750
800
B10 B20 B30
Fu
el e
neg
ry c
on
ten
t (k
J/s
ec)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
0.012
0.013
0.014
0.015
0.016
0.017
0.018
B10 B20 B30
Fu
el f
low
ra
te (
kg
/s)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
ASME 2010 Early Career Technical Journal, Vol. 9 72
-
system. The lack of understandable pattern in the figure
can be explained based on the fact that if the compressor
rotational speed remains constant, the air volumetric flow
rate will be constant. In the MGT under investigation, as
shown in Figure 11 (b), the change in rotational speed of
compressor for a particular load is negligible. Therefore,
the air volumetric flow rate is essentially constant and
thus the air mass flow rate strongly depends on the air
density, which in turn depends on the ambient
conditions. Since variations in the ambient pressure is
negligible, as shown in Figure 11 (c), the air mass flow
rate is only affected by the ambient temperature. Figure
11 (d) shows the variation of ambient temperature during
the recording of the data. For majority of the recordings,
Figure 11 (a) and (d) are in agreement, which means
when the ambient temperature increases, the air mass
flow rate reduces.
a
b
c
d
Figure 11: Diagrams to investigate the variation of the inlet air flow rate a) the air mass flow rate b)
the compressor rotational speed c) the ambient pressure d) the ambient temperature
Figure 12 (a), (b), and (c) show the turbine inlet
temperature (TIT), exhaust temperature, and compressor
pressure ratio of the MGT. As Figure 12 (a) shows, at the
full load or close to full load operations, the TIT reduces
when the concentration of biodiesel increases in the fuel.
At lower loads, however, the TIT does not change
significantly with the fuel composition. The observation
of Figure 12 (b) indicates that the exhaust temperature is
almost unaffected by the fuel composition. Figure 12 (c)
indicates that higher concentration of biodiesel results in
increase in compressor pressure ratio. Obviously, all
these three parameters decrease at lower output power
(partial loads).
The results of these experiments will be used to
develop and validate the model of the regenerative micro
gas turbine. This model will be used to predict and
evaluate the system performance when it is fueled by the
blends with higher concentration of biodiesel. The
understanding of the system behavior when fueled by the
various blends of biodiesel can help to design engines
with optimum performance with these fuels.
a
1.75
1.80
1.85
1.90
1.95
B10 B20 B30
Air
flo
w r
ate
(k
g/s
ec)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
35.0
35.5
36.0
36.5
37.0
37.5
38.0
B10 B20 B30
Co
mp
ress
or
spee
d
(rp
m/1
00
0)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
90
92
94
96
98
100
102
B10 B20 B30
Am
bie
nt p
ress
ure
(k
Pa
)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
28
30
32
34
36
38
40
42
B10 B20 B30
Am
bie
nt
tem
per
atu
re ( C
)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
830
870
910
950
990
1030
B10 B20 B30
TIT
( C
)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
ASME 2010 Early Career Technical Journal, Vol. 9 73
-
b
c
Figure 12: The variation of the MGT performance parameters when the system in fueled by B10, B20,
and B30 a) turbine inlet temperature b)exhaust temperature c)compressor pressure ratio
CONCLUTION
The results of experimental works on a dual-shaft
100 kW Teledyne RGT-3600 micro gas turbine generator
set were presented in this paper. In the modified micro
gas turbine set various parameters, including compressor,
power turbine, and generator shaft rotational speed;
compressor outlet pressure; combustor outlet (turbine
inlet) and exhaust stream temperature; fuel volumetric
flow rate; compressor inlet air mass flow rate; output
power; ambient temperature, pressure, and relative
humidity; and exhaust stream composition, can be
measured and recorded. The engine was fueled by the
blends of biodiesel and petroleum-based diesel. The
concentration of biodiesel in the fuel varied from 10% to
30% (mass-based). The results indicated that effects of
variation in fuel composition were different for various
parameters. For instance, the changes in system electrical
efficiency, compressor rotational speed, and exhaust
stream temperature were not significant, whereas
compressor pressure ratio and fuel flow rate were
considerably affected. The effect of biodiesel on some
parameters, like turbine inlet temperature, depended on
the output power.
For future work, this data will be used to develop
and validate the model of the system. This model will be
used to predict the system performance when fueled by
blends with higher portion of biodiesel.
REFERENCES Aras, H. & Balli, O. (2008). Exergoeconomic
analysis of a combined heat and power system with the
micro gas turbine (MGTCHP), Energy Exploration &
Exploitation, 26-1, 53-70
Borbely, A. M. & Kreider, J. F. (2001). Distributed
generation: The power paradigm for the new
millennium,” CRC Press
Chiang, H. W. D.; Hong, W. T.; Lee, C. H. (2007).
Microturbine performance testing with twin rotating disk
regenerators. International journal of turbo & jet
engines, 24 (3-4), 149-160
Chiang, H. W. D.; Chiang, I.C.; Li, H. L. (2009).
Microturbine performance testing using biodiesel.
International journal of turbo & jet engines, 26 (2), 168-
178
Chiang, I. C. (1995). Performance and emission
study of a turbogenerator fueled by biodiesel, Master of
Science thesis, National Tsing Hua University, Under
supervision of Dr. Hsiao-Wei Chiang, Hsinchu, Taiwan
Grigsby, L.L. (2001). The electric power engineering
handbook. CRC Press LLC, ISBN 0-8493-8578-4, USA
Karra, P. K.; Veltman, M. K.; Kong, S. C. (2008).
Characteristics of engine emissions using biodiesel
blends in low-temperature combustion regimes. Energy
and Fuels, 22 (6), 3763-3770
Li, C. H. (2010). Performance and emission study of
a turbogenerator fueled by biodiesel, Master of Science
thesis, National Tsing Hua University, Under supervision
of Dr. Hsiao-Wei Chiang, Hsinchu, Taiwan
Popovic, P. (2002). Integration of microturbine with
single-effect exhaust-driven absorption chiller and solid
wheel desiccant system. ASHRAE Transactions, 108 (2),
660-669
Senatore, A.; Cardone, M.; Rocco, V.; Prati, M. V.
(2000) A comparative analysis of combustion process in
DI diesel engine fueled with biodiesel and diesel fuel.
SAE Tech. Pap. Ser. 2000-01-0691
Song, T. W.; Sohn, J. L.; Kim, J. H.; Kim, T. S.; Ro,
S. T.; Suzuki, K. (2005) Performance analysis of a
tubular solid oxide fuel cell/micro gas turbine hybrid
power system based on a quasi-two dimensional model.
Journal of Power Sources, 142, 30-42
U.S. Department of Energy. (2000). Advanced
Microturbine Systems, Program Plan for Fiscal Years
2000 through 2006
250
260
270
280
290
300
310
320
330
B10 B20 B30
Exh
au
st t
emp
era
ture
( C
)
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
3.1
3.2
3.3
3.4
3.5
3.6
3.7
B10 B20 B30
Pre
ssu
re r
ati
o
Fuel type
P=98 kW
P=89 kW
P=69 kW
P=48 kW
P=25 kW
P=0 kW
ASME 2010 Early Career Technical Journal, Vol. 9 74
-
ASME Early Career Technical Journal 2010 ASME Early Career Technical Conference, ASME ECTC
October 1-2, 2010, Atlanta, Georgia, USA
IN-SILICO SIMULATION OF ELECTROSTATIC CHARGE EFFECTS ON INHALED AEROSOL PARTICLE DEPOSITION IN THE HUMAN LUNG
Mohammed Ali Department of Technology Jackson State University
Jackson, Mississippi, USA Phone: 601-979-0327
Fax: 601-979-4110 Email: [email protected]
ABSTRACT This paper reports computational fluid dynamics
simulation of inhaled aerosol particle deposition in the human lung airway. Visual C++ was used as the primary computational tool. Moreover, Fuch’s mathematical model for inhaled aerosol particles’ image charge force was used as the simulation method, and the lung geometry was based on widely used human lung morphological dimensions specified in Ewald R. Weibel’s model of dichotomous lung morphometry. Study results revealed doubling electrostatic charge of aerosol particles can enhance deposition three fold. Charged particles’ aerodynamic motion e.g., velocity and electrical mobility in the lungs’ tracheobronchial contiguous airway diminishes with increase of aerodynamic size. It was also predicted that a smaller (e.g., 1 m) charged particle experiences higher (one-log) image force than that of a larger (e.g., 10 m) particle while carrying the same number of elementary charges. Changes in the Brownian diffusion and gravitational settling depositions in the lung due to the coagulated bipolarly charged particles are also discussed. INTRODUCTION
An aerosol is a collection of solid or liquid particles suspended in a gas. The efficiency of inhaled aerosol drug particle deposition along the respiratory tract of human the lung depends on various electrical and mechanical properties of the aerosols generated by drug delivery devices. The entire respiratory tract of the lungs can be divided into 24 anatomical units (pulmonary drug delivery literatures often refer to each anatomical unit as a respiratory generation) [1]. The primary mechanisms of inhaled aerosol particle deposition in the changing geometry of these anatomical units consists of five electromechanical processes: inertial impaction, Brownian diffusion, interception, gravitational settling, and electrostatic effects [2].
Aerosol particles acquire charge due to triboelectrification, induction charging, and diffusion of gaseous ions in the air around the particles. When these particles carry high charges,
the electrostatic force can be thousands of times greater than the force of gravity [3]. The charge magnitude of an aerosol particle is affected by numerous factors including inhalation velocity, tidal volume, collision of particles, metal surfaces of delivery devices, particle mixture inhomogeneities, and particle size distributions [4]. Although it has been standard laboratory procedure to pass an aerosol through a charge equilibrator to attain the Boltzmann equilibrium (i.e., zero net charge), aerosols in the ambient environment or from drug delivery device actuations have only a slight possibility to get neutralized before inhalation [5].
To date, however, studies on particle electrostatic charge have been limited to the manufacture of air cleaning equipment, particulate matter samplers and measuring instruments. As far as our knowledge acquired through a comprehensive literature survey on lung deposition mechanisms it is found that very limited work has been done on charged particles’ electrodynamic properties such as electrical mobility, space and image charge forces in order to understand the fate of aerosol particles when flowing through the human lung airway. Though aerosol science is a half-century old discipline, studies focusing on charge properties of aerosols did not begin until the early 1980s. Understanding and controlling these electrodynamic properties of aerosols are topics of much current interest [6].
The electrostatic properties of particles can be divided into two categories: (a) mutual repulsions between particles due to space charge force influencing agglomeration and interactions with other particles; and, (b) mutual attractions between particles and conductive inner surfaces of airways due to image charge force [6,7]. Both forces are dependent on the number densities of airborne particles [8]. In addition, the Van der Waals attractions (adhesive force) among aerosol particles are dependent on both the electromagnetic forces acting between electrons and protons of individual molecules [9].
A study with 0.6 µm carnauba wax particles has shown that deposition increased from 13% to 22% when the average elementary charge on particles increased from 2.7 to 7.5 µC
ASME 2010 Early Career Technical Journal, Vol. 9 75
-
[10]. Balachandran [11] has reported that a relatively low particle charge (approximately 10 µC per 2 µm particle) produced enhanced pulmonary deposition, while a relatively high particle charge (approximately 300 µC per 2 µm particle) favored deposition in the upper airways.
Figure 1 illustrates how the charged particles are attracted to the conductive airway walls of the human lung. It also shows that image force exceeds the influence of inertial impaction and Brownian diffusion forces when particles are carrying intrinsic charges.
The aim of this study was to understand a significant issue
(electrical phenomena) of evaluating inhaled respiratory aerosols in determining the extent to which electrostatic charge affects their transport and deposition characteristics in the upper tracheobronchial region. In order to examine this issue, the following objectives were investigated.
1) Simulation of the effects of electrostatic image force, Fimg, a component of the surface forces (Fe), on submicron particles while flowing through the trachea and main bronchus. Flow conditions were turbulent through laminar because the Reynolds number of trachea and main bronchi ranges from 2214 to 1634 for an inhalation rate of 28.3 L/min. 2) Solving image force equations of fluid dynamics by employing object-oriented programming code C++. 3) Calculation of the initial particle profiles, particle deposition factors, inlet and wall mass flow rates by using MATLAB. 4) Discretization of all transport equations were done to at least second order accurate in space. 5) Model results were analyzed and compared with data reported in the literature.
MATERIALS AND METHODS
As alluded to the Introduction section, electrical characteristics of particles were simulated for the tracheobronchial region. The regional geometry was adopted from Weibel’s lung morphological model [1]. The simulation parameters are listed in the following Table 1.
The Lagrangian particle transport (LPT) equation has been widely used to simulate the effects of various forces on aerosol particle trajectories in the respiratory airway [9, 12]. Others estimate that a complete LPT to follow all individual particles and air parcels as they travel through the entire lung’s 24
generations would require 1017 floating point operations and several terabytes of RAM [13]. In order to overcome this limitation, simplifying assumptions have been made in the various simulation studies [14-16].
Table 1. Summary of the simulation parameters of the in-
silico tracheobronchial model.
Simulation Parameter Trachea Main Bronchus
Lung generation index 0 1 Number of airway 1 2 Airway diameter, m 0.018 0.0122 Airway length, m 0.12 0.048 Inhalation flow rate, Q, l/min 28.3 14.15 Inhalation flow rate, m/s 1.86 2.02 Reynolds number, Re 2214 1634
Figure 2 illustrates the trachea and main bronchus, two
consecutive lung airway generations. In order to perform the LPT with a manageable number of
computational points, several assumptions were made. These assumptions include (1) the aerosol particles are spherical in shape, non-reactive, and stable (i.e., nonevaporating or noncondensing); (2) Particles and air in the aerosol stream travel at the same velocity since the submicron particles are airborne within less than 0.001 second, i.e., negligible relaxation time; (3) Inhaled aerosols are incompressible and isentropic, i.e., no effects of thermophoretic and diffusiophoretic forces; and (4) The human lung is a sequence of branching circular pipes whose diameters are given in the idealized Weibel [1] lung morphometry.
The LPT can be expressed in the following general form.
)1()(and tudtdx
FFFFdtdum Braebp
+
+
+ -
--
+
+
+ - -
-
+
+ + -
-
-
+
+ + - -
-
-
-
+ +
+ -
-
-
+
+ +
-
- -
Image force effect on conductive walls & charged particles where Fimg >> Fimp, FBr
Figure 1. Charged particles have higher image force efficiency than impaction and diffusion.
Figure 2. Illustrations of the human lungs’ trachea and main bronchus (not in scale).
Trachea
Main Bronchus
ASME 2010 Early Career Technical Journal, Vol. 9 76
-
In the above equation, u(t) is the particle velocity and mp is the particle mass. The forces acting on individual particles include body forces, Fb (e.g., inertia, gravitation) due to the particle’s position in the aerosol streamline, surface forces (Fe) (e.g., electrostatic space and image forces) due to interaction with the surrounding particles and airway walls, adhesive forces Fa (e.g., Van der Waals and capillary forces, interceptive force), and Brownian diffusive forces, FBr due to irregular wiggling (Brownian) motion of aerosol particles and random variations in the relentless bombardment of air molecules against the particles.
Fuchs’ [17] theoretical treatment proposed electrostatic image charge force as situated between a charged particle in the aerosol stream and the airway wall while it is passing through a conductive respiratory tract. A particle with mechanical mobility, B, and electrostatic charge, q, at a distance, x, from the wall of a cylindrical bronchus or bronchiole or spherical alveolus of radius, R (x is small as compared to R), is attracted by the wall with a force called image force, Fimg, which can be calculated using following equation.
)2(16 2
2
xqFimg
Yu [8] extended Fuch’s theory by incorporating airway radius into Equation 2 and, assuming that particle number density is low, so mutual particle interactions are negligible. The image force of the particle can then be determined by the following equation:
)3()(16 22
22
xRRxqFimg
Equation 3 can determine image force more accurately for the upper conducting airways (i.e., trachea to the terminal bronchi) of the human lung in this respect. However, Fuch’s formula is very practical while considering distal respiratory airways. Because, these capillary sized airways are located in the terminal bronchiole and alveoli. Charged particle drifts toward the wall with an instantaneous
velocity, 2
2
16 xqBv
. Therefore, the time taken by a particle
to reach airway wall is calculated by, 2
3
316
qBxt , where
is the permittivity of air (8.85 x 10-12 C2/N.m). Particles acquire electrostatic charges during generation by
the diffusion of ions in aerosol streams, caused by the collisions resulting from Brownian motion of the ions and particles [3,18]. Acquisition of charges by a particle as a function of time and the charge state of the particle can be calculated in a simplified and dimensionless form with the following equation [19,20]:
)4(2
2
Tkdenq
p
where q is the particle charge, n is the number of elementary charge units, e is the electronic charge (1.6 x 10-19 Coulomb), is the permittivity of air, dp is the particle diameter, k is the Boltzmann’s constant, and T is the absolute temperature. If we know the density of a particle, ρ, then the charge on an individual particle can be described in terms of its average charge-to-mass ratio, q/m, which can be calculated by the following equation.
)5(3 422
Tkden
mq
p
RESULTS AND DISCUSSION Computational models on aerosol particle deposition
calculate the mean deposition in each lung generation using an idealized equation for stable laminar airflows. However, the airflows at bifurcations are very complicated [21], and far from being stable and laminar. A diseased lung’s geometry and ventilation differ from a healthy lung. Such differences affect aerosol flow profiles through the lung airway. In order to simulate the realism, this study adopted an approach of modeling the affected flow profiles’ influence on particle electrostatic charge acquisition and dissipation which ultimately effect inhaled aerosol deposition.
In this computational model the inhalation cycle was considered, and the deposition efficiency was defined in a simplified manner as the number of particles deposited in a region of the lung divided by the number of particles entering the region. The model did not account for deposition due to impaction, sedimentation, interception, and diffusion besides electrostatic forces, as it will make the model run NP-hard.
Most of the results found in the literature refer to aerosol consisting of a collection of modispersed particles. In practice this is hardly the case, and the aerosol particles are not only having an aerodynamic size distributions but also electrostatic charge distributions. Therefore, this study accounted polydispersed aerodynamic size and electrostatic charge distributions of aerosol particles.
Figure 3 shows the electrical mobility of inhaled aerosol particles inside the trachea as a function of particles’ aerodynamic diameter. From several hundred computations, Millikan showed that the charge in a particle is always a whole number multiple (e, 2e, 3e, etc.) of a fundamental charge unit, known as elementary charge or the charge of an electron, e [22]. The amount of charge of an electron is called one elementary charge which is equal to 1.6 x 10-19 Coulomb. Therefore the charges of all particles in this model were considered to be a multiple of the elementary charges.
ASME 2010 Early Career Technical Journal, Vol. 9 77
-
Figure 5. Deposition efficiencies of aerosols carrying two different elementary charges in the
tracheobronchial region of human lung.
05
101520253035404550
0.1 1 10
200 Elementary Charge
300 Elementary Charge
05
101520253035404550
05
101520253035404550
0.1 1 10
200 Elementary Charge
300 Elementary Charge
Dep
ositi
on E
ffici
ency
, %
Aerodynamic Diameter, µm
Figure 4. Velocity profile of inhaled aerosol particles inside the trachea of the human lung as a function of aerodynamic diameter (size).
0
1.0
2.0
3.0
4.0
5.0
6.0
1 102 3 4 5 876 90
1.0
2.0
3.0
4.0
5.0
6.0
1 102 3 4 5 876 9
Velo
city
x 1
0-13
, m
/s
Aerodynamic Diameter, µm Figure 6. Comparison of electrostatic image
charge forces acted upon a 1 m and a 10 m sized particles.
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
20.0
0 10 20 30 40 50 60
10 µm Particle
1 µm Particle
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
20.0
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
20.0
0 10 20 30 40 50 60
10 µm Particle
1 µm Particle
Imag
e Fo
rce
x 10
-21 ,
N
Elementary Charge
Figure 3. Electrical mobility of inhaled aerosol particles inside trachea of the human lung as a function of aerodynamic diameter (size). Each
particle carried 10 electronic charges.
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
1 102 3 4 5 876 90.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
1 102 3 4 5 876 9Ele
ctric
al M
obili
ty x
10-
9 , m
2 /V.s
Aerodynamic Diameter, µm
Since particle velocity is a function of electrical mobility, a
charged particle velocity profile inside a lung airway should also display similar behavior as compared to electrical mobility. Like Figure 3, charged particles’ velocity in Figure 4 illustrates the same trend as electrical mobility: particle velocity inversely changes with aerodynamic size.
The effect of elementary charge magnitude in particles is presented in Figure 5. As the charge increased from 200 to 300 (1.5 times) elementary charges per particle, electrostatic image charge force becomes the more dominant mechanism. It can be seen that the deposition almost increased two fold for particularly smaller (dp < 2 m) particles (Figure 5).
The integrated effects of aerodynamic size and electrostatic charge make a big difference in behaviors of inhaled aerosol particles in the tracheobronchial airway. Figure 6 shows the comparison of electrostatic image charge forces that acted upon a 1 m and a 10 m sized particles which carry 0, 10, 20, 30, 40 and 50 elementary charges.
It was also predicated that a smaller (dp 1 m) charged
particle experiences higher (one-log more) image force than that of a larger (dp 10 m) particle while carrying the same number of elementary charges. In this study, the accounted charged particles were carrying both positive and negative charges. Simulation results showed that bipolarly charged particles demonstrated a tendency to attract each other due to Coulombic attraction forces, which allowed smaller particles to grow larger and therefore tend to deposit more efficiently due to gravitational settling (because of formation to a larger mass). The agglomeration due to electromagnetic forces is consistent with the physical phenomenon of persuasion of electromagnetic forces between oppositely charged particles [9].
CONCLUSIONS
A flexible lung simulation incorporating aerosol’s electrical properties has been developed and realized. At this point, several conclusions can be made based upon the data generated from this study. Doubling electrostatic charge of an aerosol particle can enhance deposition three times. When particles are carrying electrostatic charges, their aerodynamic motion, e.g., velocity and electrical mobility, in the lungs’ tracheobronchial contiguous airway diminishes with increase of aerodynamic
ASME 2010 Early Career Technical Journal, Vol. 9 78
-
size. It was also predicated that a smaller (dp 1 m) charged particle experiences higher (one-log more) image force than that of a larger (dp 10 m) particle while carrying the same number of elementary charges. Compared to the Brownian diffusion, gravitational settling deposition becomes dominant in the lung for coagulated bipolarly charged particles.
ACKNOWLEDGEMENT
This study was funded by the NSF Mississippi-EPSCoR grant # 362492-190200-01/NSF EPS-0903787. REFERENCES [1] Weibel, E. R., 1963, Morphometry of the Human Lung, Springer-Verlag, Berlin, Chap. 9. [2] Ali, M., 2009, “Mechanical Tracheobronchial Model for Human Lung Inhalation Study,” ASME Early Career Technical J., 8(1), pp. 18.1-18.7. [3] Hinds, W. C., 1999, Aerosol Technology: Properties, Behavior and Measurement of Airborne Particles, Wiley, New York, NY, Chap. 11. [4] Staniforth, J. N., 1994, “The Importance of Electrostatic Measurements in Aerosol Formulation and Preformulation,” In Byron, P.R., Dalby, R.N., and Farr, S.J. (Eds.), Respiratory Drug Delivery IV, Interperm Press, Deerfield, IL, pp. 303-311. [5] Martonen, T. B., and Yang, Y., 1996, “Deposition Mechanics of Pharmaceutical Particles in Human Airways,” In Hickey, A. J., (Ed.), Inhalation Aerosols, Marcel Dekker, New York, NY, PP. 3-28. [6] Orban, J. C, and Peart, J., 2004, “Simultaneous Electrostatic Charge Characterization and Particle Size Analysis of Metered Dose Inhalers (pMDIs) using the Electrical Low Pressure Impactor,” In Dalby, R. N., Byron, P. R., Peart, J., Suman, J. D., and Farr, S. J., (Eds.) Respiratory Drug Delivery IX, Virginia Commonwealth University, Richmond, VA, pp. 877-880. [7] Bailey, A. G., Hashish, A. H., and Williams, T. J., 1998, “Drug Delivery by Inhalation of Charged Particles,” J. Electrostatics, 44, pp. 3-10. [8] Yu, C. P., 1977, “Precipitation of Unipolarly Charged Particles in Cylindrical and Spherical Vessels,” J. Aerosol Sci., 8, pp. 237-241. [9] Finlay, W. H., 2001, The Mechanics of Inhaled Pharmaceutical Aerosols: An Introduction, Academic Press, San Diego, CA, Chap. 1. [10] Hashish, A. H., Bailey, A. G., and Williams, T. J., 1994, “Selective Deposition of Pulsed Charged Aerosols in the Human Lung,” J. Aerosol Med., 7, pp. 67-171. [11] Balachandran, W., Machowski, W., Gaura, E., and Hudson, C., 1997, “Control of Drug Aerosol in Human Airways using Electrostatic Forces,” J. Electrostatics, 40&41, pp. 579-584. [12] Xi, J., Longest, W. P., and Martonen, T. B., 2008, “Effects of Laryngeal Jet on Nano- and microparticle Transport and Deposition in an Approximate Model of the Upper Tracheobronchial Airways,” J. Applied Physiol., 104, pp. 1761-1777.
[13] Finlay, W. H., 2004, “Lung Deposition Simulation,” In Hickey, A. J. (Ed.) Pharmaceutical Inhalation Aerosol Technology, 2nd Edition. Marcel Dekker, New York, NY. Pp. 155-170. [14] Longest, P. W., and Xi, J., 2007, “Computational Investigation of Particle Inertia Effects on Submicron Aerosol Deposition in the Respiratory Tract,” J. Aerosol Sci., 38, pp. 111-130. [15] Herranz, L. E., Cabrer, A., and Peyres, V., 2000, “Modeling Intertial Impaction within Pool Scrubbing Codes,” J. Aerosol Sci., 31(1), pp. S43-S44. [16] Park, S. S., and Wexler, A. S., 2007, “Particle Deposition in the Pulmonary Region of the Human Lung: A Semi-empirical Model of Single Breath Transport and Deposition,” J. Aerosol Sci., 38, pp. 228-245. [17] Fuchs, N. A., 1964, The Mechanics of Aerosols, Pergamon Press, Oxford, UK. Chap. 3. [18] Ali, M., Reddy, R.N., and Mazumder, M. K., 2008, “Electrostatic Charging Effect on Workplace Aerosol Particle Deposition in a Hollow Throat Cast,” J. Electrostatics, 66, pp. 401-406. [19] Fjeld, R. A., Wu, D., and McFarland, A. R., 1990, “Evaluation of Continuum Regime Theories for Bipolar Charging of Particles in the 0.3-13 μm Diameter Size Range,” IEEE Trans. Ind. Appl., 26(3), pp. 523-528. [20] Lawless, P. A., 1996, “Particle Charging Bounds, Symmetry Relations, and an Analytic Charging Rate Model for the Continuum Regime,” J. Aerosol Sci., 27(2), pp. 191-215. [21] Jan D. L., Sharpiro, A. H., and Kamm, R., 1989, “Some Features of Oscillatory Flow in Model Bifurcation,” J. Appl. Physiol., 67, pp. 147-159. [22] Allen, M. D., and Raabe, O. G., 1982, “Reevaluation of Milikan’s Oil Drop Data for Motion of Small Particles in Air,” J. Aerosol Sci., 6, pp. 537-547.
ASME 2010 Early Career Technical Journal, Vol. 9 79
-
ASME Early Career Technical Journal2010 ASME Early Career Technical Conference, ASME ECTC
October 1 – 2, Atlanta, Georgia, USA
MATHEMATICAL MODELS FOR PREDICTION OF WELD BEAD GEOMETRY IN GMAW OFALUMINIUM ALLOY 7005
Reeta WattalDepartment of Mechanical Engineering
Delhi Technological UniversityDelhi-110042, India
Sunil PandeyDepartment of Mechanical Engineering
Indian Institute of Technology Delhi,New Delhi-110016, India.
ABSTRACTBead geometry in the arc welding process is an
important factor in determining the mechanicalcharacteristics of weld. Bead geometry variables such asweld penetration), bead width, height ofreinforcement/crown height are greatly influenced bywelding process parameters including welding current,welding voltage, shielding gas, and nozzle to platedistance. Also in the recent years, there has been asignificant growth in the use of automated and roboticwelding systems. These systems can be used effectivelywhen mathematical models that correlate welding processparameters to the weld bead geometry and shaperelationships are available. Mathematical models havebeen developed by using fractional factorial technique topredict weld bead geometry and shape relationships asaffected by welding wire feed rate, arc voltage, nozzle toplate distance, welding speed and gas flow rate inGMAW of aluminium alloy 7005. The adequacy ofmodels and significance of the coefficients were tested byusing the analysis of variance, ‘F’ test and Student’s‘t’test respectively.
Keywords: Bead geometry and shape relationships,Aluminium alloy 7005, Gas metal arc welding,Mathematical modelling, Factorial technique.
INTRODUCTIONThe popularity and rapid increase in demand for
aluminium and its alloys in manufacturing wide variety ofproducts world-wide, is generally due to their highspecific modulus of elasticity and excellent corrosionresistance in the atmosphere, water, oil and manychemicals. Wide variety of aluminium alloys have beendeveloped, amongst which Al-Zn-Mg alloys with Zn from3.0 - 7.5% and designated by 7xxx series, are known forhigh strength and are alloys of choice in military,aerospace and transportation industries. GMAW isconsidered to be an ideal process for joining aluminiumplates in thickness above 3 mm.
With the increase of automation in arc welding,the selection of welding procedure must be more specificto ensure that adequate bead quality is obtained. Further
to get the desired quality welds, it is essential to have acomplete control over the relevant welding parameters toobtain the required bead geometry and shape relationshipson which is based the load bearing capacity of a weldment[1]. The welding parameters such as the wire feed rate(W), arc voltage (V), Contact tube to work distance(N),welding speed (S) and gas flow rate (G) control the weldbead geometry and shape relationships i.e. weldpenetration (p), bead width (w), height ofreinforcement/crown height (h), ratio of bead width topenetration (w/p) generally referred to as weld penetrationshape factor (WPSF), ratio of bead width to reinforcementheight (w/h) also known as weld reinforcement form factor(WRFF), and % dilution (%D) which is percentage ratio ofarea of base metal melted to total area of the weld bead at agiven cross-section of the weld deposit. All these terms aredepicted in Figure-1.
Figure 1. Weld bead geometry and shaperelationships
Welding bead geometry is influenced by a largenumber of process parameters that may affect productquality, productivity and cost effectiveness. Therelationship between GMAW process parameters andweld bead geometry are complex because of the numberof parameters involved. Many attempts have been madeto predict and understand the effect of the arc weldingprocess variables on the weld bead geometry. Theseinclude theoretical studies based on heat flow theory [2-6] and empirical methods based on studies of actualwelding situations [7-12].
p Weld bead penetration w Weld bead widthh Weld bead height Angle of convexity Angle of entry Ap Area of penetrationAr Area of reinforcement At Ap + ArWPSF, (w/p) Weld penetration shape factorWRFF, (w/h) Weld reinforcement form factor
dilution%100AAD%
t
p
ASME 2010 Early Career Technical Journal, Vol. 9 80
-
An early approach to procedure optimizationcalled ‘‘tolerance box approach’’ was developed tooptimize welding procedure selection and to relate tosubsequent experimentation [13, 7-8]. This technique isvery effective in providing a solution to the weldingoptimization problem. Welding variables are optimizedusing tolerance to process variations and production rate,but it becomes difficult when dealing with more thanthree variables. Mcglone and Chadwick have reported amathematical analysis correlating process variables andbead geometry for the submerged arc welding of squareedged close butt joints [9]. Process variables in thesestudies included welding current, arc voltage, weldingspeed, bevel angle and electrode diameter.
Similar mathematical relationship betweenwelding variables and fillet weld geometry for gas metalarc welding using flux – cored wires have also beenreported [10]. Chandel first applied this technique toGMA welding process and relationship between processvariables and bead geometry was investigated [11].These results showed that the arc current has the greatestinfluence on bead geometry, and that mathematicalmodels derived from experimental results can be used topredict bead geometry accurately. Their study wasextended to the weld deposit area and the effects ofelectrode polarity, extension, electrode diameter, weldingcurrent, arc voltage, travel speed, power speed settingand the flux basicity on the weld deposited area waspresented [12]. The need to automate the weldingprocesses was particularly felt in the hazardous andconfined areas and therefore there was a need fordeveloping correlations between welding parameters andweld bead geometry responses [14-25].
The objective of this paper was to develop themathematical models based on practical observationsmade during the gas metal arc welding of aluminiumalloy 7005 using fractional factorial technique to predictweld bead geometry as affected by welding processparameters.
DESIGN OF EXPERIMENTSStatistical designing of experiments based on
factorial techniques, reduce costs and provide therequired information about the main and interactioneffects of welding parameters on the response [22-24]. Inthe present study, two-level quarter fractional factorialdesigns of 82 25 weld runs was selected fordetermining the effect of five direct welding parameterson weld bead geometry and shape relationships. Thistechnique also helped in reducing the experimental runsto minimum possible. The design required three sets ofeight weld runs for calculating the variance ofoptimization and adequacy required for developing themodels.
Selection of two levelsThe judicious selection of direct parameters
along with their extreme range having effects on the weldbead geometry was the next step in achieving the desiredobjective. The limits of the welding parameters wereselected on the basis of extensive trial runs. The twolevels selected provided weld beads with acceptableprofiles and were also free from the visual defects.Parameters were coded as (+1) and (-1) or simply (+) and(-) corresponding to the high and low levels for the ease ofrecording and processing of the data using (1). Parameterswith their levels are given in Table 1.
jn j0j
j
X XX
J
…..(1)
Xj = Coded value of the parameterXjn = Natural value of the parameterXj0 = Natural value of the basic levelJj = Variation intervalj = Number of the Parameter
Table1.Welding parameters and limitsParameter Units Limits
Low (-1) High (+1)Welding wire feed rate m/min. 6.0 7.5Arc voltage Volts 26.0 32.0Contact tube to workdistance
mm 15 20
Welding speed cm/min. 27 36Gas flow rate l/min 20 25
Development of a design matrixThe experiments are conducted for all possible
combinations of the parameter levels and thesecombinations when written in the form of a table, wherethe rows correspond to different trials and the column tothe levels of the parameters, form a design matrix. Inorder to determine the effect of five parameters, a twolevel full factorial design would require thirty twotrials 3225 . Such a large number of experimentswould have been time consuming and costly, therefore aquarter fractional factorial design of eight weld runs wasselected.
EXPERIMENTAL PROCEDUREThe ‘Bead on plate’ technique was employed
for depositing the weld beads on 10150250 mmplates using a mechanized welding station. A three phaseconstant potential full wave rectifier unit designed for gasmetal arc welding process with a current capacity of 425 Aat 60% duty cycle and an open circuit voltage of 12-48volts was employed. AlMg5 welding filler wire of 1.6mm ø with argon shielding was used.
ASME 2010 Early Career Technical Journal, Vol. 9 81
-
Three test specimens were cut by power sawmachine from each plate after discarding 50 mm of thebead length from either end. All the test specimens werepolished and etched with Poulton’s reagent for scanningthe cross section of bead profiles. The outlines of theweld beads were traced using a profile projector at 10magnifications. Areas and dimensions of interest weremeasured by a planimeter. The average of recorded weldbead dimensions and shape relationships for two sets ofexperimental runs along with evolved design matrix isgiven in Table 2.
Table 2. Design matrix with average responses.
SELECTION OF MODELThe polynomial of the type
Y f (W,V, N,S,G) was selected for developing themathematical models for the relationship betweenwelding parameters and the bead geometry responses.Initially it was decided to start with the linearrelationship, failing which higher order polynomialswould be considered. Thus the above relationship couldbe written in the form of a following polynomial bytaking into account all possible two factor interactions:
0 1 2 3 4 5 12
13 14 15 23 24
25 34 35 45
Y b b W b V b N b S b G b WVb WN b WS b WG b VN b VSb VG b NS b NG b SG
..(2)
0 1 2 3 4 5
6 7
Y b b W b V b N b S b Gb (WN VG) b (VN WG)
..(3)
6 13 25 7 23 15b b b , b b b
DEVELOPEMENT OF MODELSRegression analysis was used for determining
the coefficients of the model. The adequacy of the modeland significance of the coefficients was tested by theapplying ‘F’ and Student’s‘t’ test respectively.
Evaluation of the coefficientsThe regression coefficients of the selected
model were calculated using (4) [23]. This is based onthe method of least squares. The calculated coefficientsof the models are given in Table 3.
M
ji ii 1
j
X Yb , j 0,1, 2,....., k
M ..(4)
Xji = Value of a parameter or interaction in coded formYi = Average value of the response parametersM = Number of observationsk = Number of the coefficients of the model
Table 3. Estimated coefficients of the models.S.
No.Coefficient Weld bead geometry response
p h w %D1
ob 3.67 3.91 15.31 37.182
1b 0.91 0.28 1.03 6.033
2b -0.12 -0.5 1.5 3.694
3b 0.14 0.04 -0.33 0.745
4b -0.31 -0.31 -1.22 -0.956
5b -0.06 -0.04 0.16 -0.587
6b 0.11 0.13 -0.05 0.88
7b -0.14 -0.05 -0.31 -0.97
Developed modelsThe models for predicting different responses
mentioned above are given below:
p 3.67 0.91W 0.12V 0.14N 0.31S0.06G 0.11(WN VG) 0.14(VN WG)
..(5)
h 3.91 0.28W 0.5V 0.04N 0.31S0.04G 0.13(WN VG) 0.05(VN WG)
..(6)
w 15.31 1.03W 1.5V 0.33N 1.22S0.16G 0.05(WN VG) 0.31(VN WG)
..(7)
%D 37.18 6.03W 3.69V 0.74N 0.95S0.58G 0.8(WN VG) 0.97(VN WG)
..(8)
Adequacy of modelsTo test the fit and validation of the developed
statistical models, the adequacy of the developed modelswere determined by the analysis of variance technique.The regression coefficients were determined by themethod of least squares, from which the F- ratios for thepolynomials were found. The homogeneity of varianceswas tested using the Cochran’s test and it was found thatthe variances were homogeneous as shown in Table 4.These F- ratios of the models were then compared withthe F- ratio from the standard tables. Details of analysisof variance are given in Table 5.
Row W V N S G p h w D1 + + + + + 4.2 3.5 16.1 46.02 - + + - - 2.9 3.4 16.3 35.33 + - + - - 5.5 5.3 15.9 43.64 - - + + + 2.7 3.8 11.8 26.95 + + - + - 4.1 3.3 17.2 46.06 - + - - + 3.0 3.6 17.8 36.37 + - - - + 4.6 4.8 16.3 37.48 - - - + - 2.5 3.9 11.4 26.2
ASME 2010 Early Career Technical Journal, Vol. 9 82
-
Table 4. Cochran’s test for homogeneity ofvariances.
Highestvalue ofvariance
Value ofCochran’s
criterion (G)
HomogeneousWhetherGE < GTExp.
(GE)Tab.(GT)
82p
is 2.66 1.125 0.42 0.68 Yes
82h
is 0.13 0.045 0.34 0.68 Yes
82w
is 2.83 1.445 0.51 0.68 Yes
82D
is 146.97 67.28 0.45 0.68 Yes
Table 5. Analysis of variance (ANOVA).Res
ponseVarianceresponse
Std.deviation
Varianceadequacy
‘F’model
‘F’table
Modeladequate
2YS bjS 2adS
2ad
2Y
SS
2,8,0.05 Fm < Ft
p 0.331 0.20 0.785 2.37 4.5 Yesh 0.016 0.05 0.064 3.92 4.5 Yesw 0.353 0.21 0.407 1.15 4.5 Yes
% D 18.371 1.52 9.078 0.49 4.5 Yes
Significance of the coefficientsThe statistical significance of the coefficients
was tested by applying‘t’ test. Significant coefficientsfor various bead geometry responses are given inTable 6.
Table 6 Significant coefficients after t-test.
0b 1b 2b 3b 4b 5b 6b 7bp 3.7 0.9 - - - - - -h 3.9 0.3 -0.5 - -0.3 - 0.1 -w 15.3 1.0 1.5 - -1.2 - - -% D 37.2 6.0 3.7 - - - - -
RESULTSProposed models
The proposed models developed for beadgeometry responses after dropping insignificantcoefficients are given in Table 7. The WPSF and WRFFbeing a ratio can be directly calculated from the models.
Table 7. Proposed models for bead geometryp 3.67 0.91W
h 3.91 0.28W 0.5V 0.31S 0.13VG
w 15.31 1.03W 1.5V 1.22S
%D 37.18 6.03W 3.69V
Model statistics and scatter diagrams forvarious rows of design matrix
The model statistics for various rows of designmatrix for weld penetration, weld bead height, weld beadwidth and % dilution is given in Table 8. Table shows thestandard error of estimate, residual sum, residual average,residual sum of squares, coefficient of multipledetermination and adjusted coefficient of multipledetermination for the above models respectively. Thescatter diagram for observed vs. estimated values of weldbead penetration, height, width and % dilution fordifferent rows of the design matrix is given in Figure 2 toFigure 5 respectively.
Table 8. The statistics of the developed model.Model StdError
ResidualSum
ResidualAvg. RSS R^2 Ra^2
p 0.04 0.0 0.0 0.01 1 1h 0.04 0.0 0.0 0.01 1 0.99w 0.06 0.0 0.0 0.02 1 1%D 0.23 0.0 0.0 0.37 1 1
Figure 2. Scatter diagram for observed vs.estimated values of weld bead penetration for
different rows of the design matrix.
Figure 3. Scatter diagram for observed vs.estimated values of weld bead height for different
rows of the design matrix.
ASME 2010 Early Career Technical Journal, Vol. 9 83
-
Figure 4. Scatter diagram for observed vs.estimated values of weld bead width for different
rows of the design matrix.
Figure 5. Scatter diagram for observed vs.estimated values of weld % dilution for different
rows of the design matrix.
Significant main effects and interactionsThe main effect of welding wire feed rate on
weld penetration is shown in Figure 6. The main effect ofwelding wire feed rate, arc voltage and welding speed onweld bead height is shown in Figure 7. The interaction ofarc voltage and shielding gas flow rate on weld beadheight is shown in Figure 8. Similarly the effect ofwelding wire feed rate, arc voltage and welding speed onweld bead width as well as the effect of welding wirefeed rate and arc voltage on % dilution are shown inFigure 9 and Figure 10 respectively.
Figure 6. Effect of welding wire feed rate on weldpenetration.
Figure 7. Effect of welding wire feed rate, arcvoltage and welding speed on weld bead height.
4.28
3.54
4.54
3.283
4
5
-1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 1W
eld
bead
heig
ht(h
),m
mArc voltage (V), volts
Linear (G = -1) Linear (G = +1)
Figure 8. Interaction of arc voltage and shieldinggas flow rate on weld bead height.
Figure 9. Effect of welding wire feed rate, arcvoltage and welding speed on weld bead width.
Figure 10. Effect of welding wire feed rate and arcvoltage on % Dilution.
ASME 2010 Early Career Technical Journal, Vol. 9 84
-
Response surface due to parameter interactionsResponse surface for weld bead height due to
the interaction of arc voltage and shielding gas flow rateis shown in Figure-11.
Figure11. Response surface for weld bead heightdue to an interaction of arc voltage and shielding
gas flow rate.
The weld bead profiles and cross section for differentrows of matrix are shown in Figure-12 to 15.
Design Matrix Row-1 Design Matrix Row-5p = 4.2 h = 3.5 p = 4.1 h = 3.3
w = 16.1 %D = 46 w = 17.2 %D = 46Figure 12. Weld bead profiles and cross section
for high welding wire feed rate and high arc voltage.
Design Matrix Row-2 Design Matrix Row-6p = 2.9 h = 3.4 p = 3.0 h = 3.6
w = 16.3 %D = 35.3 w = 17.8 %D = 36.3Figure 13. Weld bead profiles and cross section for
low welding wire feed rate and high arc voltage.
Design Matrix Row-3 Design Matrix Row-7p = 5.5 h = 5.3 p = 4.6 h = 4.8
w = 15.9 %D = 43.6 w = 16.3 %D = 37.4Figure 14. Weld bead profiles and cross section
for high welding wire feed rate and low arc voltage.
Design Matrix Row-4 Design Matrix Row-8p = 2.7 h = 3.8 p = 2.5 h = 3.9
w = 11.8 %D = 26.9 w = 11.4 %D = 26.2Figure 15. Weld bead profiles and cross section for
low welding wire feed rate and low arc voltage.
ANALYSIS OF RESULTSModel statistics and the scatter diagram forvarious rows of design matrix
It is evident from the Table 8 that the coefficientof multiple determination R2 for weld bead penetration,height, width and % dilution is 1, whereas the adjustedcoefficient of multiple determination 2aR for weld beadheight is 0.99. The scatter diagram of Figure 2 to Figure5 shows that the estimated and the observed values ofweld bead penetration, weld bead height, weld beadwidth and % dilution for different rows of the designmatrix are quite closer to each other, indicating an almostperfect fit of the mathematical model developed.Effect on penetration
The weld penetration increased from 2.76 to4.58 mm with the increase in wire feed rate from 6.0 to7.5 m/min as shown in the Figure 6. This was obviouslydue to the fact that the increase in wire feed rate results inthe increase in welding current to keep the burn-off rateand wire feed rate in equilibrium.
Effect on bead heightFigure 7 shows the effect of welding wire feed
rate, arc voltage and welding speed on weld bead height.The reinforcement height increased from 3.63 to 4.19mm with the increase in welding wire feed rate. This wasdue to the larger amount of metal deposited per unit
ASME 2010 Early Career Technical Journal, Vol. 9 85
-
length. The increased proportion of weld metal depositedwith the increase in welding wire feed rate got distributedin the bead width and the height of reinforcement, that iswhy the increase in the height was not so pronounced.
The most important effect on crown height wasthat of arc voltage. The reinforcement height decreasedfrom 4.41 to 3.41 mm with the increase in arc voltage from26 to 32 volts. This could possibly be due to the fact thatincreased arc voltage resulted in decreasing the weld poolviscosity and hence possible flattening of the weld beaddue to the pronounced effect of gravity.
The increase in the welding speed from 27 to 36cm/min caused the decrease in crown height from 4.22 to3.60 mm. This could be due to the fact that weld poolsize is affected by cooling rate, which can decrease byincreasing the current or by decreasing the travel speed.Thus at low speed, size of the weld pool will be less i.e.width, penetration and height will decrease.
The interaction of arc voltage and shielding gasflow rate on weld bead height is shown in Figure 8. It canbe seen that the trend changed at the arc voltage of 29volts. The result indicated that the weld bead height had asteeper descent at the higher values of arc voltage andshielding gas flow rate. High heat input and the increasedgas pressure probably is the reason for decrease in weldbead height. The response surface indicates linearinteraction between these parameters.
Effect on bead widthFigure 9 shows the effect of welding wire feed
rate, arc voltage and welding speed on weld bead width.The bead width increased from 14.28 to 16.34 mm with theincrease in wire feed rate. This is due to the higher amountof weld metal deposited and higher welding currentsassociated with the increase in wire feed rate. Theincreased welding current also results in broader arc. Thecombined effect of increased welding current and largeramount of weld metal was the larger weld pool, whichsubsequently increased bead width.
Greatest effect of individual parameter on beadwidth was of arc voltage. The increase in arc voltageresulted in the increase in bead width from 13.81 to 16.81mm. This increase in bead width could be attributed to theincreased arc length with rise in arc voltage, which resultedin large spread of the arc at its base and hence increasedweld bead width.
Next in order of importance is the effect ofwelding speed. The increase in welding speed resulted inthe decrease in bead width from 16.53 to 14.09 mm. Thisdecrease in bead width with the increase in the weldingspeed can be due to decreased rate of heat input whichresults in reduced weld pool size and consequentlyreduction in width.
Effect on dilutionWire feed rate had the maximum effect on
dilution. The weld dilution increased from 31.15 to 43.21% with the increase in wire feed rate. The increase indilution with the increase in wire feed rate could beattributed to the fact that the increase in the wire feed rateincreases the welding current and as a consequence ofthis area of the molten metal is more than the increase inthe area of metal deposited across a given cross-section.The weld dilution increased from 33.49 to 40.87 % withthe increase in arc voltage as shown in Figure 10. This ismainly due to the increased heat input. The increase inheat input results in increase in the weld pool size leadingto increase in dilution.
CONCLUSIONSFollowing conclusions were drawn from this analysis.
1. A parametric window has been developed whichensures acceptable weld bead profiles withequilibrium of welding wire feed rate & burn offrate and spray mode of metal transfer.
2. Fractional factorial design is a very powerfultool for designing the experiments to predict themain and the interaction effects of differentwelding parameters on weld bead geometry andshape relationships.
3. Total of twenty-four experiments were sufficientfor providing complete information about themain and interaction effects of five weldingparameters on the various weld bead geometryresponses with 95 % confidence level.
4. All the relationships are linear in nature and canbe effectively utilized for optimizing theconditions for a specific bead dimension or shaperelationships.
5. Increase in welding wire feed rate increasedweld bead penetration, crown height, bead widthand percent dilution.
6. Increase in arc voltage increased the weld beadwidth and percent dilution but decreased crownheight.
7. Contact tube to work distance had no significanteffect on weld bead geometry and shaperelationships.
8. Increase in welding speed decreased the crownheight and weld bead width.
9. Gas flow rate had no significant effect on weldbead geometry and shape relationships.However, the increased gas flow rates appearedto improve the weld bead appearance.
10. It has been observed that the applicability of thesemodels for other Aluminium alloys such as 1xxx,2xxx, 5xxx, 6xxx, 7xxx and 8xxx is also good.
ASME 2010 Early Career Technical Journal, Vol. 9 86
-
REFERENCES1. Kim, I. S., Son, J. S., Park, C. E., Lee, C. W., and
Prasad, K. D. V., 2002, “A study on prediction ofbead height in robotic arc welding using a neuralnetwork,” Journal of Materials ProcessingTechnology, 130-131, 229–234.
2. Rosenthal, D., 1941, “Mathematical theory of heatdistribution during weld and cutting , ” WeldingJournal, 20 (5), 220s-234s.
3. Roberts, D. K., and Wells, A. A., 1954, “Fusionwelding of aluminium alloys,” British WeldingJournal, 12, 553-559.
4. Zacharia, T., Eraslan, A. H., and Aidun, D. K., 1988,“Modelling of non-autogenous welding,” WeldingJournal, 67(1), 18s-27s.
5. Tsao, K. C., and Wu, C. S., 1988, “Fluid flow andheat transfer in GMA weld pools,” Welding Journal,67(3), 70s-75s.
6. Friedman, E., and Gliickstein, S. S., 1976, “Aninvestigation of the thermal response of stationarygas tungsten arc weld,” Welding Journal, 55(12),408s-420s.
7. Doherty, J., and McGlone, J. C., 1977,“Relationships between process variables and weldgeometry,” Welding Institute Report, 52/1977/ P.E.
8. Shinoda, T., and Doherty, J., 1978, “Therelationships between arc welding parameters andweld bead geometry,” Welding Institute Report,74/1978/ P.E.
9. McGlone, J. C., and Chadwick, D. B., 1978, “Thesubmerged arc butt-welding of mild steel. Part 2. Theprediction of weld bead geometry from the procedureparameters,” Welding Institute Report, 80/1978/ P.E.
10. Doherty, J., Shinoda, T., and Weston, J., 1978, “Therelationship between arc welding parameters andfillet weld geometry for MIG welding with fluxcored wires,” Welding Institute Report, 82/1978/P.E.
11. Chandel, R. S., 1988, “Mathematical modelling ofgas metal arc weld features,” Proceedings of thefourth international conference on modelling ofcasting and welding processes, 109-120.
12. Yang, L. J., Chandel, R. S., and Bibby, M. J.,1993,“The effect of process variables on the welddeposit area of submerged arc welds,” WeldingJournal, 72(1), 11s-18s.
13. Jones, S. B., 1976. “Process tolerance in submergedarc welding,” Welding Institute Report, 1/1976/ P.E.
14. Murugan, N., and Gunaraj, V., 2005, “Prediction andcontrol of weld bead geometry and shaperelationships in submerged arc welding of pipes”Journal of Materials Processing Technology, 168,478–487.
15. Karadeniz, Erdal., Ozsarac, Ugur., Yildiz, Ceyhan.,2007,“The effect of process parameters on
penetration in gas metal arc welding processes,”Materials and Design, 28, 649-656.
16. Ganjigatti, J.P., Pratihar, D.K., and Choudhary Roy,A., 2008, “Modelling of the MIG welding processusing statistical approaches,” International Journal ofAdvanced Manufacturing Technology, 35, 1166-1190.
17. Lee, Jeongick., and Um, Kiwoan., 2000, “Acomparison in a back-bead prediction of gas metalarc welding using multiple regression analysis andartificial neural network,” Optics and Laser inEngineering, 34, 149-158.
18. Kim, I. S., Park, C. E., Cha, Y. H., Jeong, Y. J., Kim,I. K., Kim, J. Y., and Son, J. S., 2001, “A study ondevelopment of a new algorithm for predicting theprocess variables in GMA welding processes,”JSME International Journal, 44(2), 561-563.
19. Nagesh, D. S., and Datta, G. L., 2002, “Prediction ofweld bead geometry and penetration in shieldedmetal-arc welding using artificial neural networks,”Journal of Materials Processing Technology, 123,303–312.
20. Kim, I. S., Son, J. S., Kim, I. G., Kim, J. Y., andKim, O. S., 2003, “A study on relationship betweenprocess variables and bead penetration for roboticCO2 arc welding,” Journal of Materials ProcessingTechnology, 136, 139–145.
21. Kim, I. S., Son, J. S., Park, C. E., Kim, I. J., andKim, H. H., 2005, “An investigation into anintelligent system for predicting bead geometry inGMA welding process,” Journal of MaterialsProcessing Technology, 159,113-118.
22. Montgomery, D. C., 1984, “Design and Analysis ofExperiments,” Wiley, New York.
23. Wattal, Reeta., and Pandey Sunil., 2007, “Predictionof weld bead geometry in GMAW of aluminiumalloy 7005”, Global Conference on Production andIndustrial Engineering, National Institute ofTechnology, Jalandhar, March 22-24, Paper No.327.
24. Pandey, Sunil., 2004, “Welding current and meltingRates in semiautomatic arc welding processes: ANew Approach, ” Australian Welding Journal, 34-42.
25. Nouri, M., Abdollah., and Malek, F.,2007, “Effect ofwelding parameters on dilution and weld beadgeometry in cladding, ”Journal of Material ScienceTechnology, 23(6), 817-822.
ASME 2010 Early Career Technical Journal, Vol. 9 87
-
ASME Early Career Technical Journal 2010 ASME Early Career Technical Conference, ASME ECTC
October 1 – 2, Atlanta, Georgia, USA
FINITE ELEMENT ANALYSIS OF BONDED COMPOSITE SINGLE-LAP JOINT AS A BASIS FOR OPTIMIZING FUTURE NANO-REINFORCEMENT CONFIGURATIONS
G.J. Hickman, K.T. Hsiao Department of Mechanical Engineering
University of South Alabama Mobile, AL 36688-0002, U.S.A
ABSTRACT In light of recent research, proving carbon nanotube reinforcements to be an effective method for load transfer into the continuous carbon fiber system of CFRP bonded members, the following study provides the finite element analysis of a bonded single-lap joint for further study on carbon nanotube reinforcements made in the adhesive interlayer. Using MSC Nastran and Patran finite element software, the resulting analysis both defined and located the primary failure scenario within the continuous carbon fiber system. In conclusion, failure was found to be caused by interlaminar shear stress between the first and second laminae interfacing with the adhesive. The data found in this study provides a necessary foundation for future calculations, which require further quantitative and experimental analyses. INTRODUCTION
The use of fiber-reinforced plastics (FRP) has become commonplace in a wide variety of industries due to recent advances in composite technologies. In many cases, FRP are considered superior to their metallic counterparts due to comparable strengths and modulus. Given their low densities, FRP also provide lighter design solutions, which are crucial factors for innovation in industries such as aerospace [1]. The recent discovery of carbon nanotubes and resulting advances in carbon fiber-reinforced plastic (CFRP) manufacturing technologies has further stimulated the use of composites in both the private and public sectors. Commercial aerospace giants Boeing and Airbus are now developing aircraft with primary structures containing up to 50% of composite materials on their 787 and A350XWB aircraft families, which results in reductions of fatigue and corrosion maintenance by up to 70%.
Structural designs involve the joining of composite members to transfer loads, which carry special significance for FRP. Since composites do not posses the forgiving characteristics of ductile metals, which redistribute stress concentrations by yielding, FRP joints
are typically the weakest areas within the composite structures. Composite laminates are generally joined using mechanical fastening or adhesive bonding, where polymer adhesives are commonly used. The advantages of bonded joints include more efficient load distributions over mechanical joints; also they do not require holes, resulting in simpler manufacturing [1]. In this study, a bonded single-lap joint is analyzed, which is generally the most common bonding design. However, the adhesives are typically much weaker than the composite adherends they join, which brings toughened adhesives into consideration so that bonding performance may be improved.
Not until recently has much research focused on carbon nanotube-based (CNT) adhesive reinforcement until Hsiao [2] hypothesized, “that the CNT would serve as an excellent reinforcement to toughen the adhesion between CFRP plates due to its small scale, excellent mechanical properties and good chemical compatibility with the composite adherends.” Hsiao’s hypothesis was later verified after observing a 31.2% and 45.6% increase in shear strength for 1 and 5 weight-percent (wt%) injection of multiwalled carbon nanotubes (MCNT) respectively in the epoxy adhesive. In order to better understand the improvement made by the MCNT, Hsiao also observed the fracture surfaces of the bonding areas, where failure along the bonding interface is typically observed for regular epoxy adhesive joints. Nevertheless, the 5 wt% increase of MCNT in the nano-enhanced epoxy adhesive joint effectively transferred the load to the graphite fibers in the adherends, where failure was found in the continuous carbon fiber/epoxy laminate system rather than the adhesive interlayer. Therefore, an important conclusion was drawn: bonded joints can be designed by adding MCNT in the epoxy adhesive to effectively transfer the shear load from the adhesive to the continuous carbon fiber system, which is the strongest component of the composite laminate [2].
In this report, the established, low-cost finite element analysis (FEA) method is used to further analyze the single-lap, adhesively bonded CFRP joint. Although such
ASME 2010 Early Career Technical Journal, Vol. 9 88
-
a simple joint has already been rigorously studied, far less research has been performed on this subject where the assumption has been made that the adhesive interlayer does not contain failure. Using this assumption allows the continuation of previous research on the joint using basic adhesives, whereas modeling MCNT in the adhesive would require highly advanced techniques. In contrast with prior studies, this particular finite element model (FEM) will identify specific stress components within areas of high stress concentration in the composite rather than the adhesive. By analyzing the stresses found within the composite, we may then draw better conclusions on the failure mode of the composite, observed by Hsiao, so that design recommendations may be made to further improve the performance of the joint using MCNT reinforced epoxies as adhesive.
FINITE ELEMENT MODEL
This study uses the same model geometry and similar finite element discretizations as mentioned in prior research administered by Diaz, Romera, and Baldomir (Diaz &am