Linear stability analysis of capillary instabilities for ...

Geophysical and Astrophysical Fluid DynamicsVol. 98, No. 2, April 2004, pp. 129–152
LINEAR STABILITY ANALYSIS FOR THE
DIFFERENTIALLY HEATED ROTATING ANNULUS
GREGORY M. LEWISa,* and WAYNE NAGATAb
aThe Fields Institute for Research in Mathematical Sciences, Toronto, Ontaria, Canada M5T 3J1;bDepartment of Mathematics, University of British Columbia, Vancouver, B.C., Canada
(Received 23 March 2003; In final form 27 November 2003)
We use linear stability analysis to approximate the axisymmetric to nonaxisymmetric transition in thedifferentially heated rotating annulus. We study an accurate mathematical model that uses the Navier–Stokes equations in the Boussinesq approximation. The steady axisymmetric solution satisfies a two-dimen-sional partial differential boundary value problem. It is not possible to compute the solution analytically, andthus, numerical methods are used. The eigenvalues are also given by a two-dimensional partial differentialproblem, and are approximated using the matrix eigenvalue problem that results from discretizing thelinear part of the appropriate equations.
A comparison is made with experimental results. It is shown that the predictions using linear stability analy-sis accurately reproduce many of the experimental observations. Of particular interest is that the analysispredicts cusping of the axisymmetric to nonaxisymmetric transition curve at wave number transitions, andthe wave number maximum along the lower part of the axisymmetric to nonaxisymmetric transition curveis accurately determined. The correspondence between theoretical and experimental results validates thenumerical approximations as well as the application of linear stability analysis.
A linear stability analysis is also performed with the effects of centrifugal buoyancy neglected. Along thelower part of the transition curve, the results are significantly qualitatively and quantitatively differentthan when the centrifugal effects are considered. In particular, the results indicate that the centrifugal buoy-ancy is the cause of the observation of a wave number maximum along the transition curve, and is the cause ofa change in concavity of the transition curve.
Keywords: Differentially heated rotating fluid experiment; Axisymmetric to nonaxisymmetric transition;Numerical computation of eigenvalues
1 INTRODUCTION
The differentially heated rotating annulus experiment has long been used as a means ofstudying the dynamics of baroclinic fluid systems, and it is generally accepted that flowsobserved in the experiments exhibit dynamics similar to those of large-scale flowsobserved in the Earth’s atmosphere (see, e.g., Hide and Mason, 1975, for an earlyreview). The experiments often take the form of observing the fluid flow in a rotatingcylindrical annulus with the differential heating obtained by keeping the inner andouter walls of the annulus at different temperatures. Various stable flow patterns are
*Corresponding author. Present address: Faculty of Science, University of Ontario Institute of Technology,2000 Simcoe Street North, Oshawa, Ontario, L1H 7K4, Canada. E-mail: [email protected]
ISSN 0309-1929 print: ISSN 1029-0419 online 2004 Taylor & Francis Ltd
DOI: 10.1080/0309192042000204004

observed at different values of the rotation rate and the differential heating. Usually, theresults are presented in a diagram where the transitions between the different flow typesare plotted on a log–log graph with coordinate axes being the Taylor number T and thethermal Rossby numberR, which are judged to be the twomost important dimensionlessparameters (Fein, 1973; Hide and Mason, 1975). The Taylor number
T ¼42R4
2ð1Þ
is a measure of the relative importance of rotation to viscosity, where is the rateof rotation, R ¼ rb ra is the difference between the outer radius rb and inner radiusra of the annulus, and is the kinematic viscosity of the fluid. The thermal Rossbynumber
R ¼gDT
2R2ð2Þ
is a measure of the relative importance of differential heating to rotation, whereT ¼ Tb Ta is the imposed horizontal temperature gradient, Tb and Ta are thetemperatures at the outer and inner walls of the annulus, respectively, is thecoefficient of thermal expansion of the fluid, D is the height of the annulus, and g isthe gravitational acceleration. See Section 2. Here, we consider T > 0; the innerwall of the annulus is held at a lower temperature than the outer wall. If all otherparameters are held fixed, a specific choice of values for the differential heating Tand the rate of rotation (the external physical parameters that are varied duringan experiment) determines a unique pair of values for the thermal Rossby numberand the Taylor number (the dimensionless parameters), and visa versa.
The experiments generally find four main flow regimes in different regions of par-ameter space: (1) Axisymmetric flow, characterized by its azimuthal invariance. (2)Steady waves (also called baroclinic waves), a nonaxisymmetric flow that resembleswaves that have constant amplitude and structure, and that rotate at a constant ratewith respect to the annulus. Different wavelengths are seen in different subregions,with the possibility of observing stable waves of different wavelengths within thesame subregion. The transitions between the subregions exhibit hysteresis. Thesewaves have been labeled ‘‘steady’’ even though they do not correspond to a steadyflow because their amplitude and structure are constant in time. This is in contrastto vacillating flow that is observed in the next region. (3) Vacillation, where the ampli-tude or structure of the observed wave varies apparently periodically in time. (4)Irregular Flow, characterized by its irregular nature in both space and time. All ofthese flows have their counterparts in the atmosphere (Hide and Mason, 1975; Ghiland Childress, 1987).
Of particular interest in this article is the transition from the axisymmetric to waveregime. For small values of the differential heating and rotation rate, a steady axisym-metric pattern is observed. As the parameters are increased, this relatively simple pat-tern becomes unstable and a wave motion is observed. Generally, on a log–log graph ofthermal Rossby number R versus Taylor number T , the axisymmetric to wave transi-tion curve has concavity predominately toward the right (as the letter ‘‘C’’), and is oftenseparated into three, dynamically similar, parts: (1) the lower symmetric, for lowvalues of R, where the transition curve has negative slope; (2) the knee, the part near
130 G.M. LEWIS AND W. NAGATA

the turning point of the transition curve, i.e., near where the slope of the curve isinfinite; and (3) the upper symmetric, for larger values of R, where the curve has posi-tive slope. See Hide and Mason (1975) for a schematic diagram of the transition curve.
Numerical simulations of Navier–Stokes models of the differentially heated rotatingannulus have been used to make direct quantitative comparisons with the laboratoryexperiments (Williams, 1971; James et al., 1981; Hignett et al., 1985; Miller andButler, 1991; Lu et al., 1994). In all these studies, the procedure that is implemented,which could be called simulation or ‘‘numerical experimentation,’’ consists of numeri-cally solving the initial-value problem associated with the model equations, usingthe known steady solution (plus a random perturbation) as the initial condition.Numerical experimentation is particularly useful in the study of transient behavior,and for the validation of numerical methods. However, in the calculation of the asymp-totic stability (long-time behavior) of a solution and flow transition curves, it leads to aqualitative method that does not highlight the physical processes that lead to theobserved dynamics. In particular, the mode of instability is not singled out.Furthermore, certain practical issues could potentially lead to faulty predictions,including numerical error; long-time integration is needed to determine the stability,and errors are introduced at every time step. This procedure also becomes computa-tional intensive if a detailed investigation of parameter space is desired, therefore,only small regions in the parameter space are usually explored, or the space ofparameters is only covered coarsely.
In contrast, linear stability analysis may be used to produce a detailed, quantitative,objective determination of the boundaries of the region of stability of a steady solution,and numerical approximations of the eigenvalues can be more easily verified. Also, theinformation that is gained may be used in a bifurcation analysis that could lead tofurther understanding of the mechanisms present in the physical system.
The application of linear stability analysis to the differentially heated rotatingannulus, however, presents certain numerical challenges. In particular, the steadyaxisymmetric solution of a Navier–Stokes model of the annulus cannot be foundanalytically, and the corresponding eigenvalue problem cannot be reduced to aone-dimensional problem. Thus, in order that sufficiently fine numerical resolutioncan be attained to produce valid results, appropriate numerical techniques must beimplemented (see, e.g., Christodoulou and Scriven, 1988, Dijkstra et al., 1995,Govaerts, 2000). Even so, it is not known a priori if sufficient resolution will be attain-able with the available resources.
Even when reliable numerical approximations can be made, linear stability analysis isnot always capable of accurately reproducing experimental results. For example, inPoiseuille flow, experimental observations indicate that instability sets in for signifi-cantly lower parameter values than the linear stability analysis predicts (Maslowe,1985; Trefethen et al., 1993). The cause of this has been attributed to the nonorthogon-ality of the eigenfunctions, due to the linearization of the dynamical equations aboutthe steady solution being a nonnormal operator1 (Trefethen et al., 1993; Farrell andIoannou, 1996). Such operators often result, for instance, when considering steadyflows with nonlinear spatial variations. In problems involving nonnormal operators,
1A normal operator is defined as an operator A that satisfies AA ¼ AA, where A is the adjoint of A; anoperator is normal if and only if all its eigenfunctions are mutually orthogonal.
LINEAR STABILITY ANALYSIS 131

it is possible that even when the steady solution is linearly stable, small perturbations(that are present in all physical systems) can grow to appreciable size before theyultimately decay. Thus, small perturbations may take the flow into some regimewhere the linearization is not valid.
The success of linear stability analysis, for example, in the application to Rayleigh–Benard convection (see, e.g., Chandrasekhar, 1961) has been attributed to the normal-ity of the linearization of the dynamical equations about the relevant steady flow.However, linear stability analysis does not always fail in cases involving nonnormaloperators. For example, in the Couette–Taylor problem (Chossat and Iooss, 1994),linear stability analysis successfully predicts experimentally observed transitionsbetween different flow regimes. In fact, the most prominent failure of linear stabilityanalysis seems to be in its application to parallel shear flows, and it is possible that non-normality is only an issue when considering operators that are, in some sense, ‘‘far fromnormal’’ (Trefethen, 1997).
In this article, we use linear stability analysis to approximate the transition from axi-symmetric to nonaxisymmetric flow in the differentially heated rotating annulus. Thesteady solution of the model equations that corresponds to the axisymmetric flowmust be numerically approximated from a discretization of a two-dimensional partialdifferential boundary value problem. In addition, the eigenvalue problem can only bereduced to a two-dimensional partial differential problem that also must be solvednumerically. Furthermore, although the steady axisymmetric flow is not a parallelshear flow, the linearization of the model equations about the corresponding steadysolution is not a normal operator. Therefore, it is not known a priori if linear stabilityanalysis will give accurate predictions. For this reason, we make a detailed quantitativecomparison between the predictions we obtain using linear stability analysis and theexperimental observations of Fein (1973). We study an accurate mathematical model,with the intent of minimizing errors due to the model, so that it can be argued thatany substantial discrepancies between the theoretical and experimental results canbe attributed to either errors in the numerical approximations or the failure of linearstability analysis.
In addition, we use linear stability analysis to make a quantitative investigationof the effects of the centrifugal buoyancy on the dynamics that are observed in theannulus. In particular, we compare the results obtained when the centrifugal buoyancyterm is included in the model, with the results obtained when it is neglected.
In Section 5, we present our results, and show that, for this application, linear stabi-lity analysis is indeed successful in predicting the experimental observations. Theremainder of the article is arranged as follows. We write down the model equationsin Section 2, while in Section 3, the eigenvalue problem for the present application isderived. The numerical methods are discussed in Section 4, and, in Section 5, the resultsare described and discussed. In Section 5, we also discuss the effects that the centrifugalbuoyancy has on the transition curve. A summary follows.
2 MODEL EQUATIONS
The model consists of the Navier–Stokes equations describing the fluid motion ina rotating reference frame, and simplified using the Boussinesq approximation.
132 G.M. LEWIS AND W. NAGATA

In particular, we consider the variations of all fluid properties, except the density, to benegligible, and the equation of state of the fluid is assumed to be
¼ 0½1 ðT T0Þ, ð3Þ
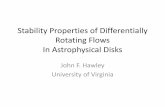
where is the density of the fluid, T is the temperature, is the (constant) coefficient ofthermal expansion, and 0 is the density at a reference temperature T0. The dimension-less quantity ðT T0Þ is assumed to be small. A significant simplification due to theBoussinesq approximation is that the fluid can be considered to be incompressible.The boundaries are the inner and outer walls of the cylindrical annulus, as well as arigid flat top and bottom. At the boundaries, the no-slip condition is imposed on thefluid, and the temperature is Ta and Tb at the inner and outer walls, respectively.The bottom and top are thermally insulating. The equations are written in circularcylindrical coordinates in a frame of reference co-rotating at rate with the annulus.The radial, azimuthal, and vertical (or axial) coordinates are denoted r, ’, and z,respectively, with unit vectors er, e’, and ez. (See Fig. 1).
The equations describing the evolution of the vector fluid velocity, u ¼
uðr, ’, z, tÞ ¼ uer þ ve’ þ wez and the temperature of the fluid, T ¼ Tðr, ’, z, tÞ are
@u
@t¼ r2u 2ezTuþ ðgez 2rerÞðT T0Þ
1
0Jp ðu EJÞu, ð4Þ
@T
@t¼ r2T ðu EJÞT , ð5Þ
J E u ¼ 0, ð6Þ
D
fluidrb
Ta Tb
ar
Ω
R
yrx φ
zΩ
FIGURE 1 The differentially heated rotating annulus experiment, where the annulus is rotated at rate and the inner wall is held at the fixed temperature Ta and the outer wall at temperature Tb, creating adifferential heating. ra and rb are the radii of the inner and outer cylinders, R ¼ rb ra, and D is the heightof the annulus.
LINEAR STABILITY ANALYSIS 133

where p is the pressure deviation from p0 ¼ 0gðD zÞ þ 02r2=2, is the kinematic
viscosity, is the coefficient of thermal diffusivity, g is the gravitational acceleration,J is the usual gradient operator in cylindrical coordinates, and the spatial domain isdefined by ra < r < rb, 0 ’ < 2, and 0 < z < D. The values of and are chosento be those of the fluid at the reference temperature T0, and it is assumed that thedifference between the temperature of the fluid and T0 is everywhere small enough sothat and can be considered as constants. In Section 5.3, we discuss the effectsthat omitting the centrifugal buoyancy term 2rðT T0Þer has on the results.Elsewhere, we include this term, because it is found that it must be considered inorder to accurately reproduce experimental observations.
The boundary conditions are
u ¼ 0 on r ¼ ra, rb and z ¼ 0,D, ð7aÞ
T ¼ Ta on r ¼ ra, T ¼ Tb on r ¼ rb, ð7bÞ
@T
@z¼ 0 on z ¼ 0,D, ð7cÞ
with 2-periodicity in the azimuthal variable ’.If we scale the spatial variables as
r ! Rr0, ’ ! ’, z ! Dz0, ð8Þ
and write
T ! T 0 þTr0 Tra
Rþ Ta, ð9Þ
where R ¼ rb ra and T ¼ Tb Ta, then drop the primes, we obtain the followingequations describing the evolution of the fluid velocity u¼ uðr,’,z, tÞerþ vðr,’,z, tÞe’þwðr,’,z, tÞez, pressure deviation p¼ pðr,’,z, tÞ and temperature deviation T ¼
Tðr,’,z, tÞ:
@u
@t¼ sr
2s u
1
R0Jsp 2ezTu
þ ðgez 2RrerÞ T þT rra
R
þ Ta T0
h i
1
Rðu EJsÞu, ð10Þ
@T
@t¼ sr
2s T þ s
T
rT
Ru
1
Rðu EJsÞT , ð11Þ
Js E u ¼@u
@rþu
rþ
@v
@’þ1
@w
@z¼ 0, ð12Þ
where ¼ D=R, s ¼ =R2, s ¼ =R2,
r2s ¼
@2
@r2þ1
r
@
@rþ
1
r2@2
@’2þ
1
2@2
@z2, Js ¼ er
@
@rþ e’
1
r
@
@’þ ez
1
@
@z, ð13aÞ
134 G.M. LEWIS AND W. NAGATA

ðu EJsÞu ¼ ðu EJsÞuv2
r
er þ ðu EJsÞvþ
uv
r
h ie’ þ ½ðu EJsÞwez, ð13bÞ
and
ðu EJsÞf ¼ u@f
@rþv
r
@f
@’þ1
w@f
@zð14Þ
for any scalar function f ¼ f ðr,’,z,tÞ. The domain is now expressed as ra=R< r< rb=R,0’<2, 0< z<1, and the boundary conditions are
u ¼ 0 on r ¼ra
R,rb
Rand z ¼ 0, 1, ð15aÞ
T ¼ 0 on r ¼ra
R,rb
R, ð15bÞ
@T
@z¼ 0 on z ¼ 0, 1 ð15cÞ
with 2-periodicity in ’ for u, T, and p.If the equations were written completely in terms of dimensionless variables, then the
Taylor number T , the thermal Rossby number R, and other dimensionless parameterswould enter the equations. However, this would not simplify the analysis, and thus, wechoose to work with the equations in the form (10)–(12). This follows previous numer-ical work on this problem (see references in Section 1). The parameters of interest arethe rotation rate and the temperature difference T between the inner and outerannulus walls, because these are the quantities (external variables) that are generallyvaried in an experiment. We present our results in terms of T and R so that theymay be easily compared to the experimental results.
3 THE ANALYSIS
The linear stability of a steady solution is defined in terms of the eigenvalues of the lin-earization of the dynamical equations about that solution. If the real parts of all theeigenvalues are negative, then all small perturbations from the steady solution willdecay in the linearized equations. In this case, the solution is said to be linearlystable. If any of the eigenvalues has positive real part, then some small perturbationswill grow, and the solution is linearly unstable. If there are only eigenvalues withzero real part and negative real part, it is called neutrally stable, because there is neithergrowth nor decay of some small perturbations. The curves in the space of parametersthat indicate the parameter values where the solution is neutrally stable are called neu-tral stability curves. It is expected that these correspond to transition curves of theobserved flow.
We seek the locations in the (,T) parameter space where the steady axisymmetricsolution is neutrally stable. However, the eigenvalues cannot be computed analyticallyand are therefore approximated numerically. An analytical form for the steady axi-symmetric solution is also not known, and thus, this too has to be approximatednumerically. In the analysis, this is dealt with by leaving the axisymmetric solution
LINEAR STABILITY ANALYSIS 135

unresolved in the perturbation equations (see Section 4.2). Then, for the numericalapproximation of the eigenvalues, the values of the axisymmetric solution are onlyneeded at specific spatial locations (the grid points), and numerical approximationsare used.
In the remainder of this section, we discuss the equations that must be derivedin order to calculate the eigenvalues. We discuss the numerical approximations inSection 4.
3.1 Steady Axisymmetric Solution
The analysis begins with the computation of a steady axisymmetric solution. That is,we look for solutions of (10)–(12), satisfying the boundary conditions (15), in the form
u ¼ uð0Þðr, zÞ, v ¼ vð0Þðr, zÞ, w ¼ wð0Þðr, zÞ, T ¼ T ð0Þðr, zÞ, p ¼ p8ðr, zÞ, ð16Þ
where the dependent variables are independent of ’ and t. Although it is not writtenexplicitly, the solutions also depend on the parameters.
If uð0Þ and wð0Þ are written in terms of a stream function , defined by
uð0Þ ¼1
r
@
@z, wð0Þ ¼
1
r
@
@r, ð17Þ
then the incompressibility condition is automatically satisfied. After using (17) toreplace uð0Þ and wð0Þ in the equations, the pressure terms can be eliminated. Thus, theaxisymmetric solution can be found from the resulting three equations in the threeunknown functions vð0Þ, , and T ð0Þ. The equations are found using the Maple symboliccomputation software package, and are sufficiently complicated that no insight isgained by explicitly writing them here.
The boundary conditions for vð0Þ and T ð0Þ are as before (15), while the no-slipconditions on uð0Þ and wð0Þ become
@
@r¼
@
@z¼ 0 on r ¼
ra
R,
rb
Rand z ¼ 0, 1:
This condition implies that is constant on the boundaries, and because there is afreedom to choose up to an additive constant, the additional boundary condition ischosen to be
¼ 0 on r ¼ra
R,
rb
Rand z ¼ 0, 1:
3.2 The Perturbation Equations
The equations that we linearize to compute the eigenvalues are called the perturbationequations. We write
u ¼ uð0Þ þ uu, p ¼ pð0Þ þ pp, T ¼ T ð0Þ þ TT , ð18Þ
136 G.M. LEWIS AND W. NAGATA

so that ðuu, pp, TT Þ is a perturbation from the steady axisymmetric solution ðuð0Þ, pð0Þ,T ð0ÞÞ,where uð0Þ ¼ uð0Þer þ vð0Þe’ þ wð0Þez. By substituting (18) into (10)–(12), and droppingthe hats, we obtain the perturbation equations
@u
@t¼ sr
2s u
1
R0Jsp 2ezTuþ ðgez 2RrerÞT
1
Rðuð0Þ EJsÞu
1
Rðu EJsÞu
ð0Þ 1
Rðu EJsÞu, ð19Þ
@T
@t¼ sr
2s T
T
Ru
1
Rðuð0Þ EJsÞT
1
Rðu EJsÞT
ð0Þ 1
Rðu EJsÞT , ð20Þ
Js E u ¼ 0 ð21Þ
with the boundary conditions (15).The trivial solution u ¼ 0, p¼ 0, T¼ 0 now satisfies these equations, and corresponds
to the steady axisymmetric solution of (10)–(12). The linearization of the perturbationequations is not a normal operator.
3.3 The Eigenvalue Problem
To obtain the eigenvalue problem, we linearize the perturbation equations (19)–(21),and assume that the unknown functions may be written as
u ¼ uðr, ’, z, tÞ ¼ et ~uumðr, zÞeim’, Tðr, ’, z, tÞ ¼ et ~TTmðr, zÞe
im’, ð22Þ
where m is an integer, and the form of the azimuthal dependence of the unknown func-tions can be assumed because of the 2-periodicity in ’. A linear eigenvalue problem isobtained for each azimuthal (or zonal) wave number m, and thus, we have a neutralstability curve for each m (see Lewis (2000), for the eigenvalue problem writtenexplicitly in scalar form). To one side of each curve (the ‘‘stable’’ side), all small pertur-bations of the given wave number decay to zero in the linearized equations, whereasto the other side (the ‘‘unstable’’ side), there is a perturbation that grows exponentially.In the region of parameter space which is on the stable side of all the neutral stabilitycurves, the solution is linearly stable. In the region on the unstable side of any of thecurves, the solution is unstable. If the parameters are varied such that there is a crossingfrom the stable region to the unstable region, we can expect a transition from axisym-metric to nonaxisymmetric flow.
If m 6¼ 0, it is possible to eliminate the pressure deviation and azimuthal velocityterms from the eigenvalue problem. Consequently, the eigenvalues can be foundfrom the generalized eigenvalue problem
AAmUUm ¼ LLm
UUm ð23Þ
with eigenfunctions
UUm ¼
~uum~wwm~TTm
0@
1A,
LINEAR STABILITY ANALYSIS 137

where AAm and LLm are 3 3 matrices of linear differential operators. If m¼ 0, a streamfunction method can be used in exactly the same manner as in the calculation of theaxisymmetric solution. Again the equations are computed symbolically using Maple.
4 NUMERICAL METHODS
4.1 Discretization
Because it is not possible to find analytic solutions for either the axisymmetric solutionor the eigenvalue problem, the solutions are approximated numerically. Second-ordercentered finite differencing is used to discretize the spatial derivatives. We approximatethe value of the unknown functions at the locations of the N N grid points in theinterior of the domain. The values of T on the upper and lower boundaries mustalso be considered as unknowns. This leads to discretized solution vectors of size3N2 þ 2N.
Upon discretization, the axisymmetric solution is approximated from a system ofnonlinear algebraic equations and the partial differential eigenvalue problems becomematrix eigenvalue problems.
4.2 The Grid: Nonuniform Spacing
Boundary layers are expected in the solution of the axisymmetric problem, and there-fore, a scaling method is used to choose the locations of the grid points. This methodconsists of choosing a transformation, or change of variables, that takes a grid in theoriginal (r, z) coordinates, which is finer near the boundary than in the interior, to auniform grid in the new (x, y) coordinates. The calculations are then performed onthe uniform grid in the (x, y) coordinates. The transformation is given by
r ¼tan1ðxÞ
2 tan1ð=2Þþ1
2þra
R, z ¼
tan1ðyÞ
2 tan1ð=2Þþ1
2, ð24Þ
where is a scaling factor that determines the magnitude of compression near theboundary. The domain r2 ½ra=R,rb=R, z2 ½0,1 goes to x2 ½1=2,1=2, y2 ½1=2,1=2.The equations are transformed simply by writing uðr,zÞ¼u0ðx,yÞ (likewise for otherfunctions) and using the chain rule to write the equations in terms of derivatives withrespect to x and y.
The boundary layers in the eigenfunctions are not as severe as those in the axisym-metric solutions. In fact, significant errors can be introduced into the eigenvalue andeigenfunction computation if the grid points in the interior are too sparse. Thisoccurs even if the axisymmetric solutions appear to be well represented. This problemsuggests that different scaling factors should be used for the axisymmetric and eigen-value problems. However, the errors introduced in the interpolation seemed tonegate the benefit of using multiple scaling factors. In the calculations presented, wechoose the scaling factor ¼ 6, which gives qualitatively good results when N¼ 20.It seems that for smaller values of (for this N), the boundary layer is not well resolvedfor some values of the parameters and T , while for larger values of there are notenough interior points to sufficiently describe the eigenfunctions for all and T .
138 G.M. LEWIS AND W. NAGATA

4.3 Solution Techniques
For the computation of the axisymmetric solution we use Newton’s method. Thismethod can be combined with a predictor–corrector continuation technique to findthe axisymmetric solution for a wide range of parameter values. If ¼ 0 andT ¼ 0, then the trivial solution satisfies the axisymmetric equations. Thus for and T small, the trivial solution is a reasonable prediction of the solution, andNewton’s method is used for the correction. For small increments in the parametervalues, the previous solution is a reasonable prediction. To make larger increments inthe parameter values, a secant line approximation can be used for the prediction.
Each point on a neutral stability curve is found using an iterative secant method,where the real part of the eigenvalue with largest real part is considered as a functionof the parameters. Iteration continues until the magnitude of the real part of the rele-vant eigenvalue is less than a specified tolerance (108 for the results presented below).
The discretized transformed equations and the entries of the coefficient matrices arecomputed symbolically using Maple. The generalized matrix eigenvalue problem, thatresults from the discretization of (23), is solved in Matlab using the implicitly restartedArnoldi method (Lehoucq et al., 1998), which is a memory-efficient iterative method forfinding a specified number of eigenvalues with the largest magnitudes. A generalizedCayley transformation (Govaerts, 2000) is made so that the Arnoldi iteration findsthe eigenvalues of interest. The parameters of the transformation can be chosen toimprove convergence properties. In particular, the generalized Cayley transformation
CðL,AÞ ¼ ðL 1AÞ1ðL 2AÞ ð25Þ
maps eigenvalues of the generalized matrix eigenvalue problem Av ¼ Lv to eigen-values of the transformed matrix CðL,AÞ, such that the eigenvalues withRealðÞ > ð1 þ 2Þ=2 are mapped to the eigenvalues with jj > 1, where 1 and 2
are the real parameters of the Cayley transformation. The matrix CðL,AÞ does nothave to be formed explicitly, because the Arnoldi iteration only requires matrix-vector products involving CðL,AÞ (Lehoucq et al., 1998). Thus, the full sparseness prop-erties of L and A can be exploited, and computer memory requirements can be reduced.
4.4 Convergence
For numerical procedures, an important consideration is whether or not the method ofapproximation is convergent, and if so, to what order is the convergence. A method iscalled convergent if the error of the numerical approximation goes to zero as the stepsize (grid spacing) goes to zero. For the axisymmetric solution, if certain standardassumptions are made about the smoothness of the solutions, and if second-order cen-tered differencing is implemented, then there is convergence of order 2 (i.e., the error ofthe approximation is approximately equal to a constant times h2, as h ! 0, where h isthe step size). Convergence also holds for the eigenvalue problem, however, for thepresent application, the order of the convergence is not known.
Although convergence is an important property of a numerical method, its definitioninvolves a limit as the step size h ! 0. Therefore, it is possible that if the step size is nottaken small enough, convergence will not be observed. This is particularly evident forthe matrix approximation of the eigenvalue problem. It is obvious that the matrix
LINEAR STABILITY ANALYSIS 139

approximation will not be able to contain all the solutions of the continuous problem.(There are at most n eigenvalues of an n n matrix where there are an infinite numberof eigenvalues of the continuous problem.) It could be that when the step size isrelatively large, the eigenfunctions corresponding to the critical eigenvalues are notresolved. However, typically, it is the highly oscillatory, high wave number eigenfunc-tions that the matrix problem is unable to resolve. Since the eigenfunctions correspond-ing to the critical eigenvalues have relatively low wave numbers and are not highlyoscillatory, we expect that these functions are resolved (even if the step size is relativelylarge), and that the errors in the differencing are relatively small.
Due to the uncertainty introduced when considering finite step size, it is important tolook for evidence of convergence in the numerical results themselves. For the approx-imation of the critical parameter values (the parameter values at the transition) usinglinear stability analysis, a relatively simple way of investigating convergence consistsof inspecting the numerical differences between the approximations at adjacent levelsof discretization (grid spacing). If the differences consistently decrease as the grid isrefined, then the approximations can be assumed to be convergent.
In order to investigate convergence, and to choose an appropriate grid size for adetailed calculation of the transition curve, we calculate results on different levels of dis-cretization at several points along the transition curve. That is, the neutral stabilityboundary is approximated on the N N grid with N¼ 25, N¼ 35, and N¼ 45; seeTable I. In all cases, the approximations on the finer grids confirm the validity of theresults obtained with N¼ 25, and a comparison of the approximations at the differentlevels of discretization gives evidence of convergence. In particular, the differencesbetween the values for N¼ 35 and the values for N¼ 45 are smaller (by more thanhalf) than the differences between the values for N¼ 25 and the values for N¼ 35.However, to obtain an estimate of the order of convergence, the calculations wouldhave to be performed with an even finer grid, which was not possible with the availableresources. Note, however, that the differences in the approximations of the criticalparameter values are quite small, giving evidence that the approximations obtained
TABLE I Examples of approximate critical parameter values fordifferent values of N, where the approximations are made on an N Ngrid and 0 and T0 are the critical parameter values
N 25 35 45
0 0.784 0.776 0.773T0 5.0 5.0 5.0
0 0.668 0.658 0.655T0 2.5 2.5 2.5
0 0.589 0.577 0.573T0 1.0 1.0 1.0
0 0.65 0.65 0.65T0 0.450 0.420 0.411
0 1.0 1.0 1.0T0 0.389 0.381 0.378
0 2.0 2.0 2.0T0 0.466 0.458 0.456
140 G.M. LEWIS AND W. NAGATA

with N¼ 25 have relatively small error. These results suggest that valid approximationscan be obtained with N¼ 25, and therefore, this grid size is used in the calculationof the detailed neutral stability boundaries that are presented in Section 5. See Lewis(2000) for further discussion of the numerical convergence.
5 RESULTS AND DISCUSSION
We will compare our results to the experimental observations of Fein (1973), and,therefore, use the corresponding values of the parameters for the annulus geometryand fluid properties. These are listed in Table II.
5.1 The Axisymmetric to Nonaxisymmetric Transition
An example of the axisymmetric solution is plotted in Fig. 2. Qualitatively, the form ofthe solution is the same for all values of the parameters. The fluid velocity in the interiorof the fluid is predominantly in the azimuthal direction. The radial velocity is almostzero everywhere except at the upper and lower boundaries, where it is negative andpositive, respectively. The vertical velocity is largest at the inner and outer walls,where there is rising at the warmer outer wall and sinking at the cooler inner wall.The azimuthal velocity exhibits an almost linear shear in the vertical in the interiorwith a positive velocity in the upper half of the annulus and negative velocity in thelower half. The resulting circulation is a convection cell that, due to the Coriolisforce, is tilted from the radial plane such that, at the upper and lower boundaries,the inward and outward motion is deflected to the right.
The neutral stability curves are presented in Fig. 3. There is a separate curve for eachazimuthal wave number. The curves are the points in the parameter space where, for thegiven wave number, there is one pair of complex conjugate eigenvalues with zero realpart while all other eigenvalues associated with that wave number have negative realpart. Figure 3 shows the neutral stability curves for the wave numbers m¼ 3 tom¼ 8. Curves for wave numbers from m¼ 2 to m¼ 10 have been calculated, and it isfound that the only critical wave numbers are m¼ 3 to m¼ 8, where the critical wavenumber is the wave number of the neutrally stable wave at the axisymmetric to non-axisymmetric transition. That is, along the neutral stability curves of the wave numbersthat are not plotted (m¼ 2, m¼ 9, and m¼ 10), there is at least one other eigenvaluecorresponding to another wave number that has positive real part, and thus, the neutral
TABLE II The annulus geometry and fluid properties used in theanalysis, after Fein (1973). See Section 2 for definitions of symbols
ra 3.48 cmrb 6.02 cmR 2.54 cmD 5 cm 1.01e2 cm2/s 1.41e3 cm2/s 2.06e4 1/C0 0.998 g cm3
T0 20.0 Cg 980 g/cm3
LINEAR STABILITY ANALYSIS 141

stability curves corresponding to these wave numbers are fully contained in thenonaxisymmetric flow regime. It is not possible to calculate the neutral stabilitycurves of all wave numbers, however it can be argued that the higher wave numberswill not be critical in the parameter range of interest. We refer the reader to Lewis(2000) and here justify investigation of only a finite number of wave numbers by com-parison with the experimental results. As discussed in the previous section, a 25 25grid is used for the calculations of all curves shown. Approximately 30 points are cal-culated along each of the curves.
In Fig. 4, the curve that separates the axisymmetric from the nonaxisymmetricregimes is plotted. Along this curve it can be seen that there are transitions of thecritical wave number. These transitions occur at intersections of the neutral stabilitycurves. Also plotted in Fig. 4 is the experimentally observed transition curve takenfrom Fein (1973), with critical wave number transitions. This is the curve where a
1.41.8
2.2
0
0.5
10
0.5
1
x 103
r
stream function
z
a)
ξ
1.41.8
2.2
0
0.5
1 0.05
0
0.05
r
azimuthal velocity
z
v
1.41.8
2.2
0
0.5
1 0.2
0.1
0
0.1
0.2
r
temperature deviation
z
T
1.4 1.6 1.8 2 2.20
0.2
0.4
0.6
0.8
1
r
z
stream functionb)
∧
∨
1.4 1.6 1.8 2 2.20
0.2
0.4
0.6
0.8
1
r
z
azimuthal velocity
1.4 1.6 1.8 2 2.20
0.2
0.4
0.6
0.8
1
r
z
temperature deviation
FIGURE 2 The axisymmetric solution: (a) surface plots for the stream function (from which u the fluidvelocity in the radial direction and w the fluid velocity in the vertical direction can be determined; see Eq. (17)),v is the fluid velocity in the azimuthal direction, and T the deviation of the temperature of the fluid fromTðr ra=RÞ þ Ta. (b) The corresponding contour plots of the functions of part (a); arrows on the plot of thestream function indicate the direction of the flow. This solution is calculated on a 25 25 grid and is observedat ¼ 0:8169 and T ¼ 0:3820.
142 G.M. LEWIS AND W. NAGATA

transition from the axisymmetric to steady wave flow was observed. All curves areplotted on a log–log graph of Taylor number T versus thermal Rossby number R.Approximate experimental error bars are also included at selected points along thetransition curve. The error bars ‘‘reflect the uncertainty due to finite variations of thecritical parameter across the transition point as well as uncertainties associated withmeasuring one’s position in parameter space’’ (Fein, 1973). The error bars alongthe upper transition are too small to distinguish, and thus, they are not included.This is due to the log variation of the axes and is not a reflection of more precisemeasurements.
A number of observations can be made:
1. There is a good correspondence between the numerical and experimental results.2. Along the lower transition, the discrepancies between the theoretical and experi-
mental transition curves lie mostly within the experimental error. Along theupper transition, although the discrepancies appear to be small, they still fallbeyond the approximated experimental error. This may be due to factors thatwere not considered in the experimental errors, for instance, the disturbance effectsdue to the probes that were used to measure the temperature of the fluid. However,the discrepancies may be due to errors in the numerical approximation, or due toerrors in the model approximations (e.g., the Boussinesq approximation). It is
105
106
107
108
103
10 2
10 1
100
101
Taylor number
ther
mal
Ros
sby
num
ber
m=8
m=7m=6
m=5m=4
m=3
FIGURE 3 Neutral stability curves are plotted for the wave numbers m ¼ 3 to m ¼ 8. The curves arecalculated by finding the parameter values where, for each m, the eigenvalues of (23) all have negative realpart except one with zero real part. The curves are plotted on a log–log graph of thermal Rossby numberversus Taylor number.
LINEAR STABILITY ANALYSIS 143

unlikely that the discrepancies are due to the nonnormality of the linear part,because if they were, the theoretical curve would be to larger parameter valuesthan the experimental curve.
3. There is cusping along the upper transition curve associated with changes in thecritical wave number in both the experimental and numerical results, i.e., thecusping occurs at the crossing of two neutral stability curves when the curves arenot approximately parallel.
4. There is a local maximum of critical wave number (m¼ 8) along both the theor-etical and the experimental lower transition curves.
5. It seems that the discrepancies in the wave number transitions along the axisym-metric to nonaxisymmetric transition curve are relatively large. This could be dueto the difficulty in locating these transitions, both numerically and experimentally.
6. The theoretical lower transition curve is not linear on the graph. Fein (1973)believed that his experimental data showed evidence (albeit inconclusive) of thisclaim. See Section 5.3 for discussion.
In fact, all the main features of the transition curves observed in the experiments arereplicated with the numerical results. Neither the cusping along the upper transition northe critical wave number maximum of m¼ 8 along the lower transition has beenpredicted before in such a realistic model. Miller and Butler (1991), using numericalexperimentation (simulation), did not locate enough points along the transition curve
105
106
107
108
103
10 2
10 1
100
Taylor number
ther
mal
Ros
sby
num
ber
(3,4)
(4,5)
(5,6)
(6,7)
(7,8)
(8,7)
(7,6)
(6,5)theoretical transition curve theoretical critical wave number transitions experimental transition curve experimental critical wave number transitions
FIGURE 4 Transition curves for theory and experiment delineating the axisymmetric from the nonaxisym-metric regimes. The critical wave number transitions, labeled as (m1,m2), are also plotted along the curve.Experimental error bars are included at selected points along the experimental transition curve.
144 G.M. LEWIS AND W. NAGATA

to reproduce the curve, and thus could not make these predictions. In fact, their resultsshowed a critical wave number maximum of m¼ 7.
5.2 Wave Properties
An example of an eigenfunction associated with a critical eigenvalue is plotted in Fig. 5.Other critical eigenfunctions are qualitatively identical regardless of wave number and
0
0.5
1
1.4
1.8
2.2
10
5
0
5
zr
a)
Rea
l(Φ u
)
0
0.5
1
1.4
1.8
2.2
4
2
0
2
zr
b)
Imag
(Φu)
0
0.5
1
1.4
1.8
2.2
0
5
10
zr
c)
|Φu
|
0
0.5
1
1.4
1.8
2.2
5
0
5
10
zr
d)
Rea
l(Φ v
)
0
0.5
1
1.4
1.8
2.2
10
5
0
5
10
zr
e)
Imag
(Φv
)
0
0.5
1
1.4
1.8
2.2
0
5
10
zr
f)
|Φv
|
0
0.5
1
1.4
1.8
2.2
2
1
0
1
2
zr
g)
Rea
l(Φ w
)
0
0.5
1
1.4
1.8
2.2
0
1
2
3
4
zr
h)
Imag
(Φw
)
0
0.5
1
1.4
1.8
2.2
0
1
2
3
4
zr
i)
|Φw
|
0
0.5
1
1.4
1.8
2.2
10
5
0
5
10
zr
j)
Rea
l(Φ T
)
0
0.5
1
1.4
1.8
2.2
0
5
10
15
20
zr
k)
Imag
(ΦT
)
0
0.5
1
1.4
1.8
2.2
0
5
10
15
20
zr
l)
|ΦT
|
FIGURE 5 An example of the radial and vertical dependence of an eigenfunction with m ¼ 6 and N=30at ¼ 0:5838 and T ¼ 0:6944: (a) real part, (b) imaginary part, and (c) amplitude of the radial componentof the eigenfunction, (d) real part, (e) imaginary part, and (f) amplitude of the azimuthal component of theeigenfunction, (g) real part, (h) imaginary part, and (i) amplitude of the vertical component of the eigenfunc-tion, (j) real part, (k) imaginary part, and (l) amplitude of the temperature component of the eigenfunction.That is, the actual components of the eigenfunctions are the plotted functions multiplied by eim’.
LINEAR STABILITY ANALYSIS 145

location along the transition; this is an interesting observation in itself. It is expectedthat, to first order, the waves that equilibrate in the steady wave regime will have asimilar form as these critical eigenfunctions. This similarity can be seen by comparisonof the eigenfunctions with previous experimental and numerical observations of steadywaves. In particular, measurements from experiments, with the same annulus geometryas is used for our results, also indicate that the temperature has a maximum at mid-radius mid-depth (Fein, 1973). Furthermore, the coarse features of the form of theeigenfunction are consistent with the detailed experimental and numerical results ofHignett et al. (1985), as well as the numerical results of Williams (1971), even thoughdifferent annulus geometries, waves with different dominant wave numbers, andwaves far from the axisymmetric-to-wave transition curve are studied. This includes(Hignett et al., 1985, Figs. 5 and 6) the radial dependence of the Fourier amplitudeof the dominant wave number of the radial velocity at various heights, and theradial dependence of the Fourier amplitude of the dominant wave number of the azi-muthal velocity at mid-depth. In our case, the square of the Fourier amplitude isgiven by ½Realðmc
Þ2þ ½Imagðmc
Þ2, where the critical eigenfunction of wave
number mc is mceimc’, mc
¼ mcðr, zÞ, ‘‘Real’’ represents the ‘‘real part of ’’ and
106
10 5
10 4
10 3
10 2
10 6
10 5
10 4
10 3
10 2
10 1
α ∆ T / Ω
drift
rat
e
experimentaltheoretical theoretical
FIGURE 6 Theoretical and experimental drift rates of steady rotating waves at transition, where the driftrate is the frequency that full wavelengths drift past a fixed point on the annulus. Theoretical drift rates arelabeled with boths and dots so that the results from neighboring wave numbers can be distinguished (that is,transitions from s to dots, and visa versa, correspond to wave number transitions along the transitioncurve). The solid line is consistent with the experimental results (within experimental error) of Fein (1973).Theoretical results are calculated from (26). T= is the intensity of the ‘‘thermal wind,’’ see Fein (1973).
146 G.M. LEWIS AND W. NAGATA

‘‘Imag’’ represents the ‘‘imaginary part of.’’ See also Williams (1971, Fig. 8) for thevertical dependence of the deviations from the azimuthally averaged flow of bothtemperature and velocity for the (numerical) wave forms in an annulus without arigid lid. Compared to our predictions, however, the waves of these experimental andnumerical studies show a relative decrease in the amplitude at mid-radius of the azi-muthal average of the azimuthal velocity (i.e., the wave number zero Fourier compon-ent of the azimuthal velocity). In our case, the azimuthal average to first order is givenby the axisymmetric solution ½uð0Þ, pð0Þ,T ð0Þ (see Fig. 2). The waves studied by Hignettet al. (1985) and Williams (1971) are observed in regions of parameter space far fromthe axisymmetric-to-wave transitions, where the higher-order effects, which linearanalysis cannot predict, may be important.
The ‘‘drift rate’’ of the steady wave at transition can also be approximated from theimaginary part of the critical eigenvalue, where the drift rate is the frequency that fullwavelengths drift past a fixed point on the annulus. The drift rate !d is given by
!d ¼!c
mc, ð26Þ
where !c is the imaginary part of the critical eigenvalue and mc is the wave number ofthe eigenfunction associated with the critical eigenvalue. The theoretical drift rates atthe transition are calculated from (26), and are plotted in Fig. 6. The solid line in thefigure is a line that is consistent with experimental data (Fein, 1973). Again there isgood correspondence. The experimental results do not cover the whole transitioncurve because some of the wave speeds were judged to be too slow to measure accu-rately (Fein, 1973).
5.3 Effects of Centrifugal Buoyancy
When written in a rotating (noninertial) frame of reference, the equations of motionhave extra terms that are often associated with ‘‘imaginary’’ forces. These forces aregenerally separated and labeled as the Coriolis and the centrifugal forces. In applicationto fluid flow, the centrifugal force, like gravity, is a buoyancy force, i.e., it is only effec-tive when there are changes in the density of the fluid. In large scale geophysical flows,the Coriolis force is of central importance, while the centrifugal force (or buoyancy) isgenerally considered to be of secondary significance (Pedlosky, 1987). However, in thedifferentially heated rotating annulus experiment, certain observations depend on thesign of the differential heating, which suggests that the centrifugal force can play animportant role (Fultz, 1961; Koschmieder, 1978).
In order to perform a detailed quantitative study of the effects of the centrifugal forceon the transition curve from axisymmetric to nonaxisymmetric flow, the linear stabilityis calculated with the centrifugal term 2rðT T0Þer in (4) neglected, and comparedwith the results described above that include this term. The neutral stability curvesare presented in Fig. 7, while the transition curve is presented in Fig. 8.
Along the upper transition and knee, the neutral stability curves and transition curveof Figs. 7 and 8, respectively, are qualitatively and quantitatively very similar to thecurves that are calculated with the centrifugal term included. A small differencearises due to the very slight de-stabilizing effect of the centrifugal force. However,along the lower transition, there are some important differences. In particular, when
LINEAR STABILITY ANALYSIS 147

the centrifugal term is neglected, there is no wave number maximum along the transi-tion curve, and there is no change in concavity of the transition curve. These featuresare observed in experiments in which the inner cylinder of an annulus of fluid washeated and the outer cylinder was cooled (Fultz, 1961; Koschmieder, 1978), as wellas the theoretical study of Barcilon (1964), where a linear stability analysis was per-formed for a quasigeostrophic model with centrifugal effects neglected.
Although the dynamics result from a nonlinear interaction between the steadyaxisymmetric solution and the eigenfunctions (waves) it may be possible to describesome general features using simple physical arguments. As the rotation rate increases,the Coriolis force will tend to increase the curvature of the flow. In the absence of thecentrifugal force, this effect will dominate, and thus, because higher wave numbers areassociated with increased curvature of the flow, it may be expected that the wavenumber of the wave observed at transition (i.e., the critical wave number) will growas the rotation rate increases.
Another feature that can be seen in Fig. 8 is that, when centrifugal effects areneglected, increased differential heating is required to initiate instability as the rotationrate increases. That is, the transition curve does not change its concavity. This stabili-zation may be due to the increased effects of viscosity and thermal diffusivity associatedwith the higher wave number flow. When the centrifugal term is included, a stabiliza-tion is not seen; this is evident from the change in concavity of the transition curve atthe lower transition just before the wave number (8,7) transition (see Fig. 8). Becausethe centrifugal force and gravity are both buoyancy forces, they can, conceptually
105
106
107
108
102
10 1
100
Taylor number
ther
mal
Ros
sby
num
ber m=8
m=7
m=6m=5
m=4
FIGURE 7 Neutral stability curves are plotted for the case when the centrifugal buoyancy is neglected.Curves are drawn for the wave numbers from m ¼ 4 to m ¼ 8. Curves for wave numbers up to m ¼ 10 arecalculated, but are not drawn because their qualitative features are identical to the lower wave numbers, andtheir inclusion would obscure the presentation.
148 G.M. LEWIS AND W. NAGATA

(and practically), be combined into a single vector. Loosely, this combination can bethought of as a tilting of gravity from the vertical. In the limit of high rotation, thetilted gravity will be almost in the radial direction. In this case, because the differentialheating would result in an unstably stratified fluid (with respect to the tilted gravity), itwould be expected that relatively small differential heating could cause instability.Thus, as the rotation rate increases, the differential heating needed to cause instabilitywould decrease. Furthermore, in the limit of a dominating centrifugal force, thewavelength of the critical wave would be expected to depend on the annulus width(in analogy to the distance between the plates in Rayleigh–Benard convection), and,thus, as this limit is approached, the critical wave number would approach a limitingvalue. Therefore, it is expected that a wave number maximum would be observedwhen the centrifugal effects begin to dominate the Coriolis effects.
Another important difference is observed in the neutral stability curves. When thecentrifugal terms are neglected, the neutral stability curves of higher and higher wavenumber become virtually indistinguishable along the lower transition, as observed inthe quasigeostrophic model of Barcilon (1964). This could be due to the observationthat the difference in the flows associated with adjacent wave numbers becomessmall as the wave number becomes large. Although a similar feature occurs whencentrifugal effects are not neglected, there is an important difference (see Fig. 3). Inparticular, there is a convergence of a few of the neutral stability curves (near wherethe curves change concavity, T 107), after which they begin to diverge again. The
105
106
107
108
103
10 2
10 1
100
Taylor number
ther
mal
Ros
sby
num
ber
(4,5)
(5,6)
(6,7)
(7,8)
(8,7)
(7,6)
(6,5)
7,8
8,9
9,10
transition with centrifugal buoyancy neglectedcritical wave number transitionsoriginal transition curveoriginal critical wave number transitions∆ T = constant = 0.38
FIGURE 8 Theoretical transition curves from axisymmetric to nonaxisymmetric regimes for the cases whenthe centrifugal buoyancy is neglected (solid) and when it is included (dashed). The critical wave numbertransitions for the case when the centrifugal term is considered, are labeled as (m1, m2). The wave numbertransitions for the case when the centrifugal term is omitted are labeled as fm1, m2g at locations where theresults of the different cases are not the same. For reference a line corresponding toT ¼ 0:38 is drawn; othercurves with T ¼ constant are parallel to this one.
LINEAR STABILITY ANALYSIS 149

neutral stability curves associated with other wave numbers (not shown) do notconverge as closely to the same point. This relatively restricted bunching occurs dueto the competition between the tendency of the critical wave number to increase withrotation rate due to Coriolis effects, and the tendency of the critical wave number togo to a limiting value as rotation increases due to the centrifugal effects. The restrictivebunching may also have consequences on the dynamics of the fluid. If there is sufficient(nonlinear) interaction between the waves that equilibrate close to the bunching, verycomplex dynamics may be observed. In particular, it is possible that with a variationof another parameter (e.g., the annulus width), eigenfunctions of three different wavenumber can become unstable at the same point; this would occur when the (8,7) and(7,6) wave number transitions occur simultaneously. Indeed, even for the given annulusgeometry, these wave number transitions occur close to each other in parameter space,and the complex dynamics may still be observed.
6 SUMMARY
In this article, we use linear stability analysis to determine the transition from axisym-metric steady solutions to nonaxisymmetric solutions in a mathematical model ofthe differentially heated rotating annulus. The relevant eigenvalues cannot be foundanalytically and therefore numerical approximations are necessary. For two reasons,it is not known a priori if the linear stability analysis will make accurate predictionsof the transition: (1) errors in the numerical approximation of the eigenvalues maylead to faulty predictions; and (2) it has been suggested that a nonnormal linearizationof the dynamical equations about the steady solution may also lead to faultypredictions.
For this reason, we study an accurate mathematical model of the annulus, that usesthe Navier–Stokes equations in the Boussinesq approximation. We may then validatethe predictions via quantitative comparison with experimental results. Indeed, weshow that the theoretical and experimental results are in good correspondence. Theability of the analysis to replicate the experimental observations not only indicatesthe validity of the mathematical model and the numerical approximations, but alsoindicates that the nonnormality of the linearization does not preclude the use oflinear stability analysis.
Many features of the experimental transition are duplicated using the predictionsof the linear stability analysis. The theoretical transition curve itself is approximatelywithin experimental error for the lower and knee part of the transition. The smalldiscrepancy at the upper transition may be caused by errors in the mathematicalmodel or by factors that were not included in the experimental errors. The criticalwave number maximum of m¼ 8 along the lower transition is accurately predicted.For the first time in such an accurate model of the differentially heated rotating annu-lus, cusping is shown at the upper transition, and it is seen that the lower transition isnot linear. The change in concavity of the lower transition curve, and the presence of acritical wave number maximum, is shown to be a result of the centrifugal force. Theform of the eigenfunction associated with the eigenvalues that have zero real parts atthe transition show similarities with the steady waves that were observed far fromthe transition in previous numerical studies, although there is a discrepancy in theazimuthal (zonal) averages.
150 G.M. LEWIS AND W. NAGATA

A previous study (Miller and Butler, 1991), that investigated the annulus configura-tion of Fein (1973), did not investigate the axisymmetric to nonaxisymmetric transitionin detail, and therefore did not attempt to replicate the experimental results in detail.Furthermore, the study employed numerical experimentation which could not verifythe accuracy of linear stability analysis. Indeed, the fact that linear stability analysisis successful in reproducing experimental observations is an indication of themathematical (and physical) structure of the flow. In particular, it indicates a certainnondegeneracy between the natural modes of the flow, and, therefore, advocates theuse of weakly nonlinear analysis and, possibly, such methods as proper orthogonaldecomposition (POD), in which important interactions between near-degeneratemodes could be missed.
In addition to providing a means to quantitatively predict transition curves, linearstability analysis is a starting point for (nonlinear) bifurcation analysis. The resultspresented here have been used in a double Hopf bifurcation analysis at the criticalwave number transitions (Lewis and Nagata, 2003). The analysis indicates that thereis a region in parameter space, adjacent to the critical wave number transitions,where the nonlinear dynamical equations support two stable steady waves. Hysteresisof these waves is predicted.
The analysis that is presented in this article focuses on parameter ranges that areexplored in the detailed experiments of Fein (1973), however, there are otherexperiments that explore other regions of parameter space. For instance, Hide andMason (1978) studied the upper part of the axisymmetric to nonaxisymmetric transitionat large Taylor number, where so-called ‘‘weak waves’’ are observed. Although itpresents a more difficult numerical problem, an extension of linear stability analysisinto this region of parameter space may lead to insight into the nature of these waves.
Acknowledgments
This work has benefitted from the helpful comments of the reviewers, and wassupported in part by the Natural Science and Engineering Research Council ofCanada. Lewis would also like to thank the Fields Institute and its staff for their sup-port and hospitality, as well as the Killam Trusts for its support.
References
Barcilon, V., ‘‘Role of the Ekman layers in the stability of the symmetric regime obtained in a rotatingannulus’’, J. Atmos. Sci. 21, 291–299 (1964).
Chandrasekhar, S.,Hydrodynamic and Hydromagnetic Stability, Oxford University Press, Oxford, UK (1961).Chossat, P. and Iooss, G., The Couette-Taylor Problem, Vol. 102 of Applied Mathematical Sciences, Springer-
Verlag, New York (1994).Christodoulou, K. and Scriven, L., ‘‘Finding leading modes of a viscous free surface flow: an asymmetric
generalized eigenproblem’’, J. Sci. Comp. 3, 355–406 (1988).Dijkstra, H., Molemaker, M., Van Der Ploeg, A. and Botta, E., ‘‘An efficient code to compute non-parallel
steady flows and their linear stability’’, Computers and Fluids 24(4), 415–434 (1995).Farrell, B. and Ioannou, F., ‘‘Generalized stability theory, Part 1: autonomous operators’’, J. Atmos. Sci.
53(14), 2025–2040 (1996).Fein, J., ‘‘An experimental study of the effects of the upper boundary condition on the thermal convection
in a rotating cylindrical annulus of water’’, Geophys. Fluid Dynam. 5, 213–248 (1973).Fultz, D., ‘‘Developments in controlled experiments on large-scale geophysical problems’’, Adv. Geophys. 7,
1–103 (1961).
LINEAR STABILITY ANALYSIS 151

Ghil, M. and Childress, P., Topics in Geophysical Fluid Dynamics, Vol. 60 of Applied Mathematical Sciences,Springer-Verlag, New York (1987).
Govaerts, W., Numerical Methods for Bifurcations of Dynamical Equilibria, SIAM, Philadelphia (2000).Hide, R. and Mason, P.J., ‘‘Sloping convection in a rotating fluid’’, Adv. Geophys. 24, 47–100 (1975).Hide, R., and Mason, P.J., ‘‘On the transition between axisymmetric and non-axisymmetric flow in a rotating
liquid subject to a horizontal temperature gradient’’, Geophys. Astrophys. Fluid Dynam. 10, 121–156(1978).
Hignett, P., White, A., Carter, R., Jackson, W. and Small, R., ‘‘A comparison of laboratory measurementsand numerical simulations of baroclinic wave flows in a rotating cylindrical annulus’’, Quart. J. Roy.Met. Soc. 111, 131–154 (1985).
James, I., Jonas, P. and Farnell, L., ‘‘A combined laboratory and numerical study of fully developed steadybaroclinic waves in a cylindrical annulus’’, Quart. J. Roy. Met. Soc. 107, 51–78 (1981).
Koschmieder, E., ‘‘Convection in a rotating annulus with a negative radial temperature gradient’’, Geophys.Astrophys. Fluid Dynam. 10, 157–173 (1978).
Lehoucq, R., Sorensen, D. and Yang, C., ARPACK Users’ Guide: Solution of Large-Scale EigenvalueProblems with Implicitly Restarted Arnoldi Methods, SIAM, Philadelphia (1998).
Lewis, G., ‘‘Double Hopf bifurcations in two geophysical fluid dynamics models,’’ Ph.D. thesis, University ofBritish Columbia (2000).
Lewis, G. and Nagata, W., ‘‘Double Hopf bifurcations in the differentially heated rotating annulus’’, SIAMJ. Appl. Math. 63(3), 1029–1055 (2003).
Lu, H., Miller, T. and Butler, K., ‘‘A numerical study of wavenumber selection in the baroclinic annulus flowsystem’’, Geophys. Astrophys. Fluid Dynam. 75, 1–19 (1994).
Maslowe, S., ‘‘Shear flow instabilities and transition’’. In: Hydrodynamic Instabilities and the Transition toTurbulence. Vol. 45 of Topics in Applied Physics (Eds. Swinney, H. and Gollub, J.), pp. 181–228,Springer-Verlag, New York (1985).
Miller, T. and Butler, K., ‘‘Hysteresis and the transition between axisymmetric flow and wave flow in thebaroclinic annulus’’, J. Atmos. Sci. 48(6), 811–823 (1991).
Pedlosky, J., Geophysical Fluid Dynamics, Springer-Verlag, New York (1987).Trefethen, L., ‘‘Pseudospectra of linear operators’’, SIAM Rev. 39(3), 383–406 (1997).Trefethen, L., Trefethen, A., Reddy, S. and Driscoll, T., ‘‘Hydrodynamic stability without eigenvalues’’,
Science 261, 578–584 (1993).Williams, G., ‘‘Baroclinic annulus waves’’, J. Fluid Mech. 49, 417–449 (1971).
152 G.M. LEWIS AND W. NAGATA