La simulazione dinamica dei sistemi multi-body · ADAMS : Automated Dynamic ... • Data String,...
60
La simulazione dinamica dei sistemi multi-body Daniele Catelani
Transcript of La simulazione dinamica dei sistemi multi-body · ADAMS : Automated Dynamic ... • Data String,...

La simulazionedinamica dei sistemi
multi-body
Daniele Catelani


La simulazione dinamica dei sistemi multi-body
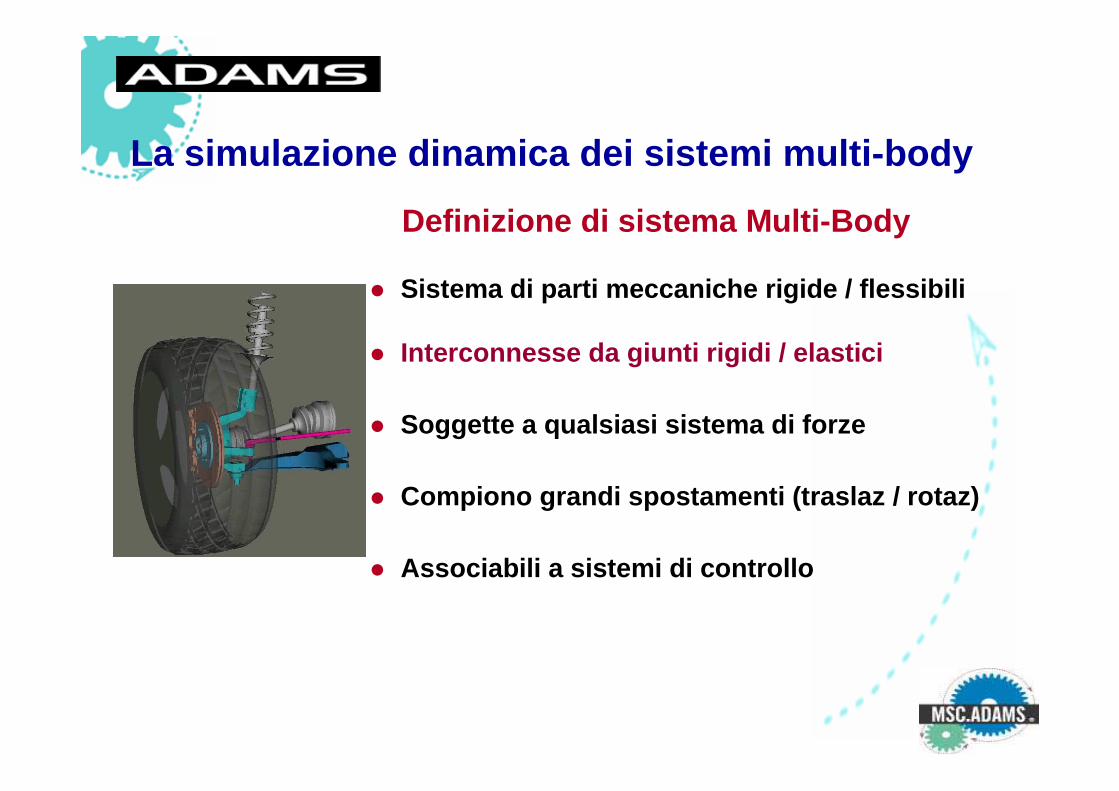
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti (traslaz / rotaz)
� Associabili a sistemi di controllo

La simulazione dinamica dei sistemi multi-body
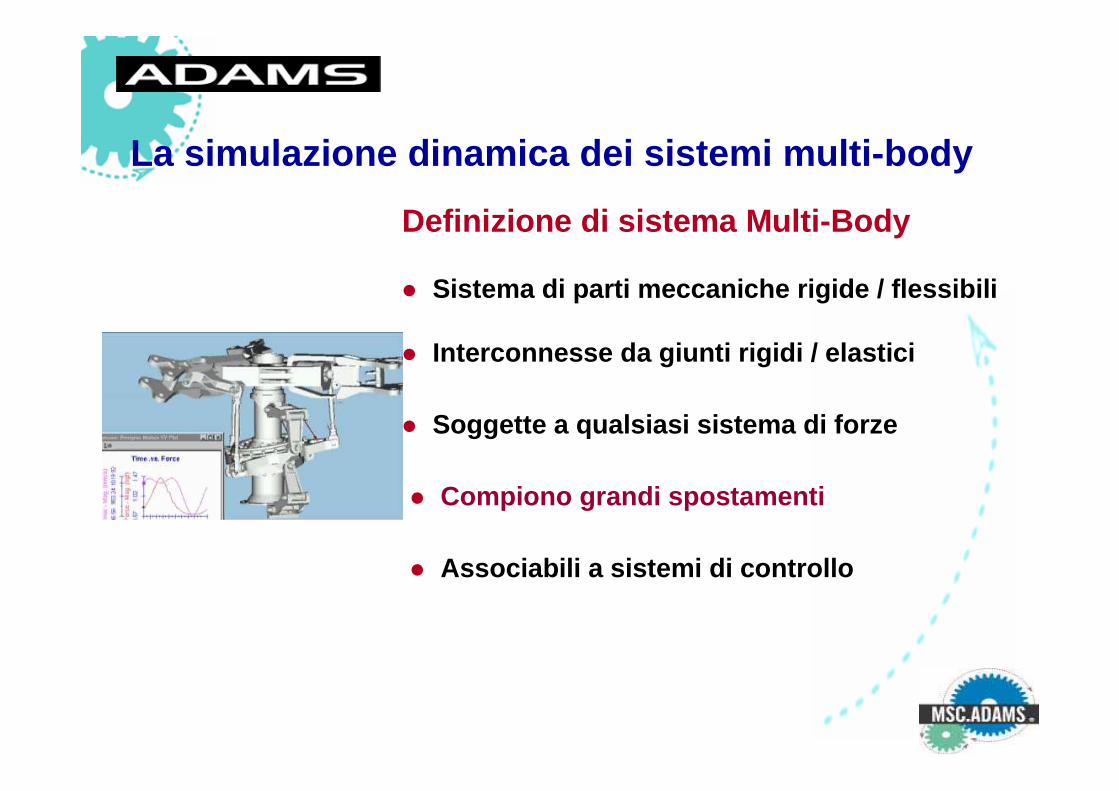
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti (traslaz / rotaz)
� Associabili a sistemi di controllo
La simulazione dinamica dei sistemi multi-body
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti (traslaz / rotaz)
� Associabili a sistemi di controllo

La simulazione dinamica dei sistemi multi-body
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti (traslaz / rotaz)
� Associabili a sistemi di controllo
La simulazione dinamica dei sistemi multi-body
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti
� Associabili a sistemi di controllo

La simulazione dinamica dei sistemi multi-body
� Sistema di parti meccaniche rigide / flessibili
Definizione di sistema Multi-Body
� Interconnesse da giunti rigidi / elastici
� Soggette a qualsiasi sistema di forze
� Compiono grandi spostamenti
� Associabili a sistemi di controllo

La simulazione dinamica dei sistemi multi-body

La simulazione dinamica dei sistemi multi-body

La simulazione dinamica dei sistemi multi-body

La simulazione dinamica dei sistemi multi-body
� Dinamica descritta da equazioni differenziali
Definizione di sistema Multi-Body
� Vincoli descritti da equazioni algebriche
� Sistema di equazioni DAE non-lineare
Risoluzione di tipo numerico
� Integratori ODE (Ordinary Differential Equations)
� Integratori DAE (Differential Algebraic Equations)

La simulazione dinamica dei sistemi multi-body
Codice per Elaborazione e risoluzione numerica dei sistemi DA E
ADAMS : Automated Dynamic Analysis of Mechanical System
� Definizione topologia (corpi,giunti,forze…)
� Definizione dati inerziali (massa,inerzia…)
� Modellazione fenomeni cinematici / dinamici
� Modellazione solida (geometria, forme,...)
� Definizione output ( measures, requests, obj …)
Impostazione Analisi Postprocessing Risultati

La simulazione dinamica dei sistemi multi-body

La simulazione dinamica dei sistemi multi-body
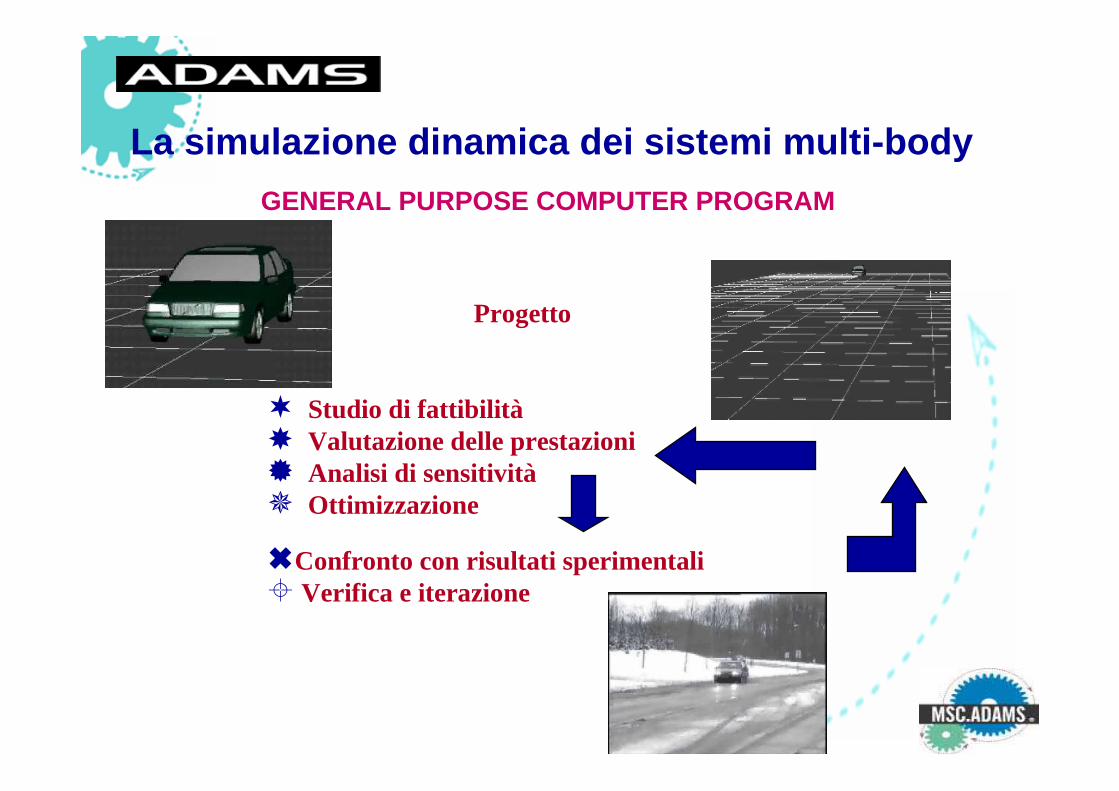
GENERAL PURPOSE COMPUTER PROGRAM
ADAMS : Automated Dynamic Analysis of Mechanical System

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Approccio Sistematico� Analisi di qualsiasi Sistema Multi-Body
� Qualsiasi campo di applicazione meccanica (generale)� Indipendente dalla specificità del problema e/o modello
SPECIAL PURPOSE COMPUTER PROGRAM
� Approccio specifico (dedicato)� Analisi di particolare (definito) sistema � Singola applicazione� Impossibilità (difficoltà) per ogni estensione a nuove problematiche

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Esigenza di analizzare sistemi complessi soggetti a grandi spostamenti (traslazioni e rotazioni) � equazioni fortemente non lineari
� Esigenza di modellare fenomeni complessi e difficilmente riproducibili� Esigenza di superare studio semplificato (linearizzazione, riduzione equazioni)� Necessità di utilizzare il Computer � sviluppo del Computer� Necessità della progettazione: riduzione costi, riduzione time-to-market,
riduzione rischi connessi alla costruzione di prototipi reali� Possibilità di applicare tecniche di ottimizzazione e Design of Experiments� Possibilità di esplorare (a rischio nullo) situazioni catastrofiche:
(esempio: ricostruzione incidenti, simulazione CRASH, ecc.)
Origine
La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Permettere laSimulazione di un generico sistema Multi-Body
� Effettuare l’analisi dinamica al variare dei parametri progettuali
� Diventare Strumento di Progettazione
� Attuare la Prototipazione Virtuale
Scopo
La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Studio di fattibilità� Valutazione delle prestazioni � Analisi di sensitività� Ottimizzazione
Progetto
�Confronto con risultati sperimentali Verifica e iterazione

I Problemi da RisolvereI Problemi da Risolvere� Prevedere in modo corretto il
comportamento del Prodotto già in fase di Sviluppo dello stesso per ottenere un buon Progetto “al primo colpo”
� Ridurre o eliminare prove, test e conseguenti modifiche sulla prima versione del Prodotto o sul suo Prototipo
� Incrementare il numero di test e prove effettuabili sul Prodotto durante la fase di Sviluppo a parità di costo e tempi, riducendo i rischi dovuti alla riduzione del Time-to-Market
� Ottimizzare, anche mediante tecniche automatiche, il Prodotto dal punto di vista funzionale e prestazionale
� “Visualizzare realmente” il comportamento del prodotto e le sue funzionalità

Il Processo di Sviluppo Il Processo di Sviluppo TradizionaleTradizionale ……
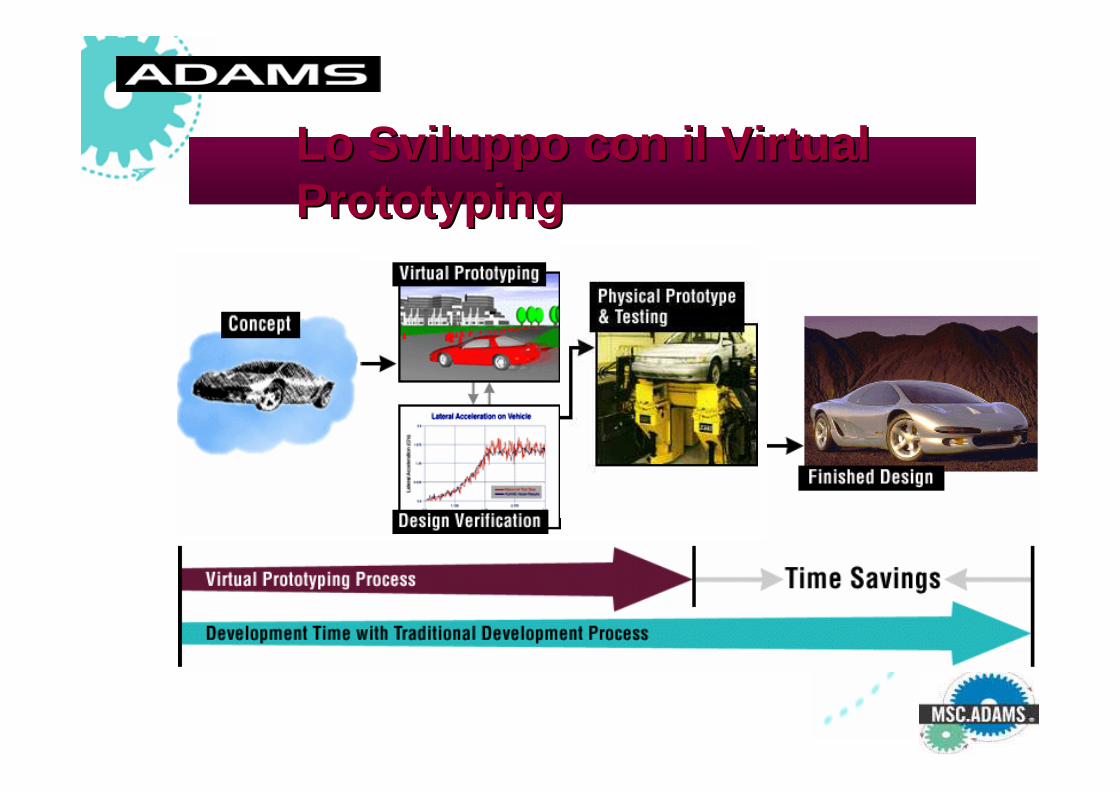
Lo Sviluppo con il Lo Sviluppo con il VirtualVirtualPrototypingPrototyping

con il con il VirtualVirtual PrototypingPrototyping ......

I Vantaggi : durante lo SviluppoI Vantaggi : durante lo Sviluppo
� Riduzione dei costi degli“Errori” perché questi sono“individuati” in una fasepreliminare del Processo diSviluppo
� Riduzione dei costi e deitempi delle prove e dellemesse a punto funzionali(Progettazione sul Prodotto)

I Vantaggi : durante il Ciclo di I Vantaggi : durante il Ciclo di VitaVita
Cos
ti(£
)
Tempo
INVESTMENT
PROFIT Time toProfit
Vita del Prodotto( Right to Market )
Fine Vita Prodotto
Time toMarket
Rilascio
Sales
Distribution
Design
Eval.
Mfg.
Sviluppo Prodotto
� La PrototipazioneVirtuale influiscedirettamente sulCiclo di Vita del Prodotto e sul“Right to Market” :
� Qualità
� Prezzo
� Performance
� Sicurezza
� Affidabilità
� Durata / Fatica
� Ergonomia




La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� 1969:Meccanismi con struttura ad albero (aperti) e bidimensionali (DRAM)� dal 1973:Strutture tridimensionali chiuse - Sparse Matrix Method; Sviluppo tecniche integrazione numerica DAE� 1977:Fondazione Mechanical Dynamics Inc. (Ann Arbor, Michigan)� 1981: Prima releaseADAMS� 1981-1991: sviluppo (modellazione corpi rigidi/flessibili, giunti, forze, ecc.)� 1991-1997:introduzione interfaccia utente (pre-post processor) e Vert. Prod.� 1997:ADAMS 9 = modulo di progettazione completa� 1998-2002: ADAMS 10-11-12 - Controls, Flex, Autoflex, Hydraulics,
Car, Rail, Engine,Aircraft, Motorsport, Motorcyle, Driveline, Driver..
� 2002-2005: MSC.ADAMS , integrazione completa con FEM,CAD,Controls� 2005-2008SimXpert New Pre-Post-Solver generation
Evoluzione

System - Focused Solutions
Product Data Management System
Traditional Component -focused CAD/CAE/CAM
System -focused Virtual Prototyping
Design - Development - Production
CAD CAE CAM
VirtualMock-up
Virtual Prototyping & Testing
Virtual Production
Traditional Component-focused CAD/CAE/CAM
CAD CAE CAMFly Through
Design Verification
DigitalAssembly
Production
Build Test Validate Optimize Automate
(MDI)

Components
Subsystems
Systems
Virtual Product Development

Discipline Integration
Marc
EASY5
ADAMS
Patran
Nastran
Virtual Product Development Environment
Dytran

Discipline Integration

Discipline Integration

Discipline Integration
� Spanish Grand Prix, May 8th, 2005� High-performance wing profiles
consistently deform under staticaerodynamic load
� Inertial effects are superimposed
� The dynamic performance of the profile is coupled to the performance of the chassis mechanicalcomponent

Discipline Integration

Auto/Truck/Bus General MachineryRail/Off-road Aero/Defense
Reaching Success in Major Industries

ADAMS Capabilities
Implementation
IntegrationCustomization Parameterization
VisualizationOptimization

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� User-friendlyness Preprocessing: inserimento dati, librerie elementi, modellazione
modellazione solida, ecc. Verifica sintattica Verifica cinematica Possibilità di analisi multiple e diversificate (statiche, dinamiche,
lineari, ecc.) Postprocessing: animazione grafica, plot, tabulati, exchange-data
� Affidabilità
Requisiti (1)

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Efficienza
� Generalità di modellazione attrito e giochi nei giunti interazione ruota-rotaia interazione pneumatico-strada impatti vibrazioni sintesi di camme elementi idraulici, elettrici, pneumatici forze aerodinamiche / fluidodinamiche
Requisiti (2)

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Estendibilità utilizzo di subroutines FORTRAN, C, C++
Aggiornabilità nuovi elementi di libreria nuove procedure di calcolo nuove capacità grafiche e di postprocessing nuovi moduli dedicati nuove funzionalità (ottimizzazione, DOE, ecc.)
Requisiti (3)

La simulazione dinamica dei sistemi multi-body
GENERAL PURPOSE COMPUTER PROGRAM
� Compatibilità interfaccia con codici FEM interfaccia con CAD interfaccia con codici System Control Oriented interfaccia con User-programs
Documentazione Manuali d’uso Manuali teorici User-application reports Internet
Requisiti (4)

La simulazione dinamica dei sistemi multi-body
Data base (1)
ADAMS : Automated Dynamic Analysis of Mechanical System
• Rigid Body Location, Orientation, Mass, CM, Density
Material properties, Initial Velocity, Geometry
• Flexible Body Location, Orientation, Flexible Data, Damping
• Marker Location, Node Id, Orientation, type
• Constraint Joint (Revolute, Translational, Cylindrica, Planar,…)
Jprim (Inplane, Inline, Perpendicular, Orientation,…)
Gear, Coupler, Ptcv, Cvcv, Contact...

La simulazione dinamica dei sistemi multi-body
Data base (2)
ADAMS : Automated Dynamic Analysis of Mechanical System
• Motion Function (analytical, experimental, user)
• Force Beam, Bushing, Field, SpringDamper, Gravity,Tire…
Single Component, Vector, General Force
• Data String, Spline, State Variable, Matrix, Curve, Array,...
• Equations Differential, LSE, GSE, Transfer Function,…
• Measures Position, Velocity, Acceleration, Force, Energy,…
• Solver Dynamics, Equilibrium, Kinematic Parameters,...
La simulazione dinamica dei sistemi multi-body
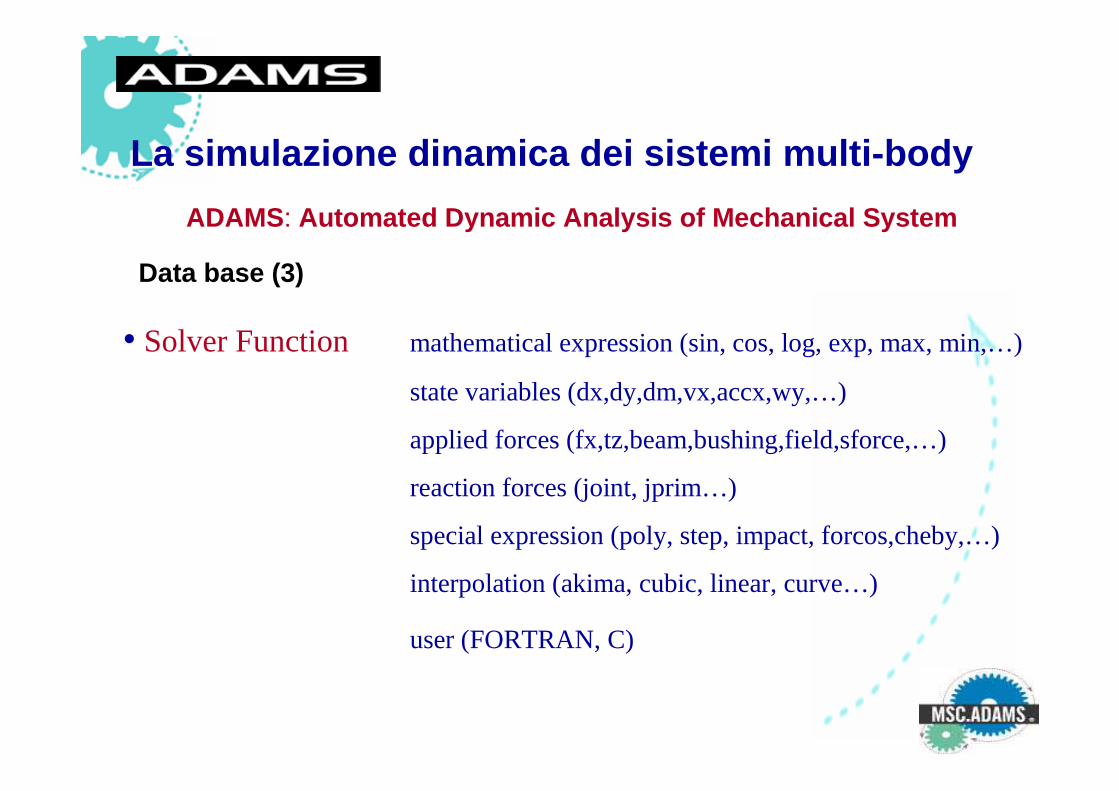
Data base (3)
ADAMS : Automated Dynamic Analysis of Mechanical System
• Solver Function mathematical expression (sin, cos, log, exp, max, min,…)
state variables (dx,dy,dm,vx,accx,wy,…)
applied forces (fx,tz,beam,bushing,field,sforce,…)
reaction forces (joint, jprim…)
special expression (poly, step, impact, forcos,cheby,…)
interpolation (akima, cubic, linear, curve…)
user (FORTRAN, C)

La simulazione dinamica dei sistemi multi-body
Data base (4)
ADAMS : Automated Dynamic Analysis of Mechanical System
• View Function mathematical expression (sin, cos, log, exp, max, min,…)
modelling (dx,dy, dz,dm,ax,ay,psi,theta,yaw,…)
string
DB
Location/Orientation
Matrix
user (FORTRAN, C)

La Flessibilità nei sistemi Multi-Body
• flessibilità = requisito di progettazione
• minimizzazione del peso
• calcolo dei carichi agenti su struttura deformabile senza strumentazione
e/o prototipi fisici
• determinazione della risposta dinamica del sistema flessibile
• interazione dinamica / elasticità (aereolasticità)
Superamento della definizione di indeformabilitàdei corpi
Interfaccia completo con FEM & Experimental Data
La Flessibilità nei sistemi Multi-Body
• Flexible Body: Stiffness & Mass Matrix, Eigenvalues 6 vectors, Geometry...• 6 rigid d.o.f. + N modal d.o.f.• Modal Analysis : reduced number of d.o.f.• Component Mode Synthesis: Normal + Static Modal Analysis• Variable Boundary Conditions• Dynamics Elasticity
• Non linear Rigid motions + Linear (Elastic) deformation• Carichi distribuiti su corpi flessibili (MFORCE)• calcolo stress e deformazioni
Product Modules
� ADAMS Full Simulation
� ADAMS/Controls
� ADAMS/Flex
� ADAMS/Autoflex
� ADAMS/Durability
� ADAMS/Linear
� ADAMS/Exchange
� ADAMS/Vibration
� …….
� ADAMS/Car
� ADAMS/Aircraft
� ADAMS/Engine
� ADAMS/Rail
� ADAMS/Driveline
Vertical Products
Toolkit
� ADAMS/Motorsport
� ADAMS/Motorcycle

ADAMS/Flex

ADAMS/Durability

ADAMS/Car (1)

ADAMS/Car (2)

ADAMS/Motorsport

ADAMS/Motorcycle

ADAMS/Engine

ADAMS/Rail

ADAMS/Aircraft