
ISAN-DSP GROUP 168 442 Introduction to Image Processing The First Semester of Class 2546 Dr. Nawapak...
45
ISAN-DSP GROUP 168 442 Introduction to Image Processing The First Semester of Class 2546 Dr. Nawapak Eua-Anant Department of Computer Engineering Khon Kaen University
-
Upload
lucas-reed -
Category
Documents
-
view
214 -
download
0
Transcript of ISAN-DSP GROUP 168 442 Introduction to Image Processing The First Semester of Class 2546 Dr. Nawapak...

ISAN-DSP GROUP
168 442 Introduction to Image Processing
The First Semester of Class 2546
Dr. Nawapak Eua-Anant
Department of Computer Engineering
Khon Kaen University

ISAN-DSP GROUP
Course Syllabus
Date and Time : MW 11.00-12.00 EN 4510, LAB1 TU17-20, LAB2 TH17-20Assessments:
Attendance & Homework 5%Lab and Homework 35%Midterm 30%
Final 30%Grading:
85-100% A, 75-85% B+, 70-75% B, 65-70% C+, 60-65% C, 55-60% D+, 50-55% D, 0-50% F
References:1. Rafael C. Gonzalez and Richard E. Woods, “Digital Image Processing”,
Addison Wesley, 1992.2. Anil K. Jain, “Fundamentals of Digital Image Processing”,
Prentice-Hall, Inc., 1989.3. William K. Pratt, “Digital Image Processing”, 2nd Edition,
Wiley & Sons, Inc., 1991.

ISAN-DSP GROUP
Course Outline
1. Introduction
2. Digital Image Fundamentals
3. Image Transforms
4. Image Enhancement
5. Image Segmentation
6. Image Compression
7. Image Morphology

ISAN-DSP GROUP
Chapter 1
Introduction to Image Processing

ISAN-DSP GROUP
What is Digital Image Processing ?
Processing of a multidimensional pictures by a digital computer
การประมวลผลสั�ญญาณร�ปภาพโดยใช้�ด�จิ�ตอลคอมพ�วเตอร�
Why we need Digital Image Processing ?
1 .เพ��อบั�นทึ#กและจิ�ดเก%บัภาพ2. เพ��อปร�บัปร&งภาพให้�ด)ขึ้#+นโดยใช้�กระบัวนการ
ทึางคณ�ตศาสัตร�3. เพ��อช้-วยในการว�เคราะห้�ร�ปภาพ4. เพ��อสั�งเคราะห้�ภาพ5. เพ��อสัร�างระบับัการมองเห้%นให้�ก�บั
คอมพ�วเตอร�

ISAN-DSP GROUP
Digital Image
Digital image = a multidimensionalarray of numbers (such as intensity image) or vectors (such as color image)
Each component in the imagecalled pixel associates withthe pixel value (a single number in the case of intensity images or a vector in the case of color images).
39871532
22132515
372669
28161010
39656554
42475421
67965432
43567065
99876532
92438585
67969060
78567099

ISAN-DSP GROUP
Visual Perception: Human Eye
(Picture from Microsoft Encarta 2000)

ISAN-DSP GROUP
Chapter 2: Digital Image FundamentalsChapter 2: Digital Image Fundamentals

ISAN-DSP GROUP
Visual Perception: Human Eye (cont.)
1. The lens contains 60-70% water, 6% of fat.
2. The iris diaphragm controls amount of light that enters the eye.
3. Light receptors in the retina- About 6-7 millions cones for bright light vision called photopic
- Density of cones is about 150,000 elements/mm2.- Cones involve in color vision.- Cones are concentrated in fovea about 1.5x1.5 mm2.
- About 75-150 millions rods for dim light vision called scotopic- Rods are sensitive to low level of light and are not involved color vision.
4. Blind spot is the region of emergence of the optic nerve from the eye.

ISAN-DSP GROUP
Chapter 2: Digital Image FundamentalsChapter 2: Digital Image Fundamentals

ISAN-DSP GROUP
Image Formation in Human Eye

ISAN-DSP GROUP
Chapter 2: Digital Image FundamentalsChapter 2: Digital Image Fundamentals

ISAN-DSP GROUP
Brightness Adaptation of Human Eye
Position
Inte
nsi
ty
Intensities of surrounding points effect perceived brightness at each point.In this image, edges between bars appear brighter on the right side and darkerOn the left side.

ISAN-DSP GROUP
In area A, brightness perceived is darker while in area B isbrighter. This phenomenon is called Mach Band Effect.
Brightness Adaptation of Human Eye (cont.)
Position
Inte
nsity
AB

ISAN-DSP GROUP
Brightness Adaptation of Human Eye (cont.)
Simultaneous contrast. All small squares have exactly the same intensitybut they appear progressively darker as background becomes lighter.

ISAN-DSP GROUP
Imaging Geometry: Perspective Transformation
Lens center
x,Xy,Y
(x,y)
z,Z
(X,Y,Z) = world coordinate
(x,y,z) = Camera coordinate system
(X,Y,Z)
= focal length
Image plane
Z
YyZ
Xx
Eq. 1.1

ISAN-DSP GROUP
Z
ZZ
YZ
X
z
y
x
c
Imaging Geometry: Perspective Transformation (cont.)
Question: How can we project the real world object at (X,Y,Z) ontothe image plane (such as photographic film)?
Answer: Relation between camera coordinate (x,y,z) and world coordinate (X,Y,Z) are given by
Since on the image plane z is always zero, z=0, we consider only (x,y)while z is neglected.
Eq. 1.2

ISAN-DSP GROUP
Imaging Geometry: Perspective Transformation (cont.)
Equation 1.2 is not linear because of Z in the dividers so weintroduce the homogeneous coordinate to solve this problem.
Z
Y
X
wCartesian coordinate
k
kZ
kY
kX
whHomogeneous
coordinate
k = nonzero constant
To convert from the homogeneous coordinate wh to the Cartesian coordinate w, we divide the first 3 components of wh by the fourth component.

ISAN-DSP GROUP
)(100
0100
0010
0001
1ZkkZ
kY
kX
k
kZ
kY
kX
Pwc hh
Imaging Geometry: Perspective Transformation (cont.)
100
0100
0010
0001
1
P
The perspective transformation matrix for the homogeneous coordinate:
Perspective transformation becomes:
Eq. 1.3

ISAN-DSP GROUP
)(Zk
kZ
kY
kX
c h
Imaging Geometry: Perspective Transformation (cont.)
z
y
x
Z
ZZ
YZ
X
ZkkZ
ZkkY
ZkkX
c
)(
)(
)(
From homogeneouscoordinate
We get camera coordinate in the image plane:

ISAN-DSP GROUP
Imaging Geometry: Inverse Perspective Transformation
100
0100
0010
0001
1
1
Phh cPw 1 where Eq. 1.4

ISAN-DSP GROUP
For an image point (x0,y0), since on the image plane z=0, we have
k
ky
kx
ch 00
0
Inverse Perspective Transformation (cont.)
???
0
or 0 0
00
0
1
y
x
w
k
ky
kx
cPw hh
We get the world coordinate :
Since the perspective transformation maps 3-D coordinates to 2-D Coordinates,we cannot get the inverse transform unless we have additional information.

ISAN-DSP GROUP
To find the solution, let
k
kz
ky
kx
ch0
0
Inverse Perspective Transformation (cont.)
We get
z
zZ
z
yY
z
xX
w
zkkz
ky
kx
cPw hh
0
0
0
0
1 or
)(Eq. 1.5

ISAN-DSP GROUP
)(
)(
0
0
Zy
Y
Zx
X
Inverse Perspective Transformation (cont.)
From Eq. 1.5,
Z
Zz
We get Eq. 1.6
Substituting Eq. 1.6 into Eq.1.5, we get
Eq. 1.7
Equations 1.7 show that inverse perspective transformation requiresinformation of at least one component of the world coordinate of the point.

ISAN-DSP GROUP
Inverse Perspective Transformation (cont.)
)( and )( 00 Zy
YZx
X
These equations:
show that points on Line L in the world coordinatemap to a single point in the image plane.
Lens center
x,Xy,Y
z,Z
(x,y)
Image plane
(X2,Y2,Z2)(X3,Y3,Z3)
Points (X1,Y1,Z1) , (X2,Y2,Z2), and (X3,Y3,Z3) map to Point (x,y) in the image plane.
(X1,Y1,Z1)
Line L

ISAN-DSP GROUP
yx
Stereo Imaging: How we get depth information from 2 eyes
Left lens center
(x2,y2)
Image 2
yx
right lens center
B
World point (X,Y,Z)
Optical axis
Image 1
(x1,y1)

ISAN-DSP GROUP
Stereo Imaging: How we get depth information from 2 eyes (cont.)
Problem: we know camera coordinates of the object on left and right image planes (x1,y1) and (x2,y2) and want to how far from the camera the object is located.Note: when y-axis is parallel to the ground, we have y1 = y2
(x2,y2)
(x1,y1)
B w
Z
Image 2
Image 1
Plane of constant Z
X
Origin of world coordinate
system

ISAN-DSP GROUP
1. From the inverse perspective transform, we compute X1 and X2:
)( and )( 22
211
1 Zx
XZx
X
3. Since left and right lenses are separated by distance B, we haveBXX 12
2. Z1 and Z2 must be equal, we get 21 ZZ
Stereo Imaging: How we get depth information from 2 eyes (cont.)
4. From 1, 2 and 3, we get
)( and )( 21
11 Z
xBXZ
xX
Solving Z yields
12 xx
BZ

ISAN-DSP GROUP
Stereo Imaging: How we get depth information from 2 eyes (cont.)
12 xx
BZ
We can locate the object if we know positions of the objectin left and right image planes using Equation:
Question: While the equation is so simple but why it is verydifficult to built an automatic stereo vision system that canreconstruct 3-D scene from images obtained from 2 cameras?
Answers: for a computer, locating the corresponding points on left and right images is the most difficult task.

ISAN-DSP GROUP
Imaging Geometry : Affine Transformations
1. Translation
2. Scaling
3. Rotating

ISAN-DSP GROUP
Image Geometry: Translation of Object
Y
Z
X
Displace the object by vector (X0,Y0,Z0) with respect toits old position.
11000
100
010
001
10
0
0
*
*
*
Z
Y
X
Z
Y
X
Z
Y
X
0*
0*
0*
ZZZ
YYY
XXX
(X+X0,Y+Y0,Z+Z0)
(X,Y,Z)
(X0,Y 0
,Z 0)

ISAN-DSP GROUP
Image Geometry: Translation of Frame
Y
Z
X
(0,0,0)
Translate the origin point of the frame by (X0,Y0,Z0)with respect to the old frame
11000
100
010
001
10
0
0
*
*
*
Z
Y
X
Z
Y
X
Z
Y
X
0*
0*
0*
ZZZ
YYY
XXX
Y
Z
X (X0,Y
0,Z
0)
The object still stays at the same position. Only the frame is moved.

ISAN-DSP GROUP
Image Geometry: Scaling Scale by factors Sx, Sy, Sz along X, Y, and Z axes.
a b
c
de
f g
A B
C
DE
F G
11000
000
000
000
1
*
*
*
Z
Y
X
S
S
S
Z
Y
X
z
y
x
ZSZ
YSY
XSX
z
y
x
*
*
*
Note: Origin point is unchanged.

ISAN-DSP GROUP
Image Geometry: Rotating an object about X-axis Rotate an object about X-axis by x in a counterclockwisedirection.
Y
Z
X=X
x
11000
0cossin0
0sincos0
0001
1
*
*
*
Z
Y
X
Z
Y
X
xx
xx
Note : In this case the object is moved. Only y and z are changed while x stills the same.

ISAN-DSP GROUP
Image Geometry: Rotating a frame about X-axis Rotate the frame about X-axis by x in a counterclockwise direction.
Y
Z
x
11000
0cossin0
0sincos0
0001
1
*
*
*
Z
Y
X
Z
Y
X
xx
xx
Y
Z
Note : In this case the object is not moved. The frame is rotated instead.
X=X

ISAN-DSP GROUP
Image Geometry: Rotating an object about Y-axis Rotate an object about Y-axis by y in a counterclockwisedirection.
Z
X
y
11000
0cos0sin
0010
0sin0cos
1
*
*
*
Z
Y
X
Z
Y
X
yy
yy
Note : In this case the object is moved. Only x and z are changed while y stills the same.
Y= Y

ISAN-DSP GROUP
Image Geometry: Rotating a frame about Y-axis Rotate the frame about Y-axis by y in a counterclockwise direction.
Y= Y
Z
X
y
Note : In this case the object is not moved. The frame is rotated instead.
Z
X
11000
0cos0sin
0010
0sin0cos
1
*
*
*
Z
Y
X
Z
Y
X
yy
yy

ISAN-DSP GROUP
Image Geometry: Rotating an object about Z-axis Rotate an object about Z-axis by z in a counterclockwisedirection.
Y
Z
X
z
Note : In this case the object is moved. Only x and y are changed while z stills the same.
11000
0100
00cossin
00sincos
1
*
*
*
Z
Y
X
Z
Y
X
zz
zz

ISAN-DSP GROUP
Image Geometry: Rotating a frame about Z-axis Rotate the frame about Z-axis by z in a counterclockwise direction.
Y
Z= Z
X
z
Y
Note : In this case the object is not moved. The frame is rotated instead.
11000
0100
00cossin
00sincos
1
*
*
*
Z
Y
X
Z
Y
X
zz
zz
X

ISAN-DSP GROUP
X
Y
Z
World Coordinate System
Image Geometry: How to compute a point on an imageplane from the world coordinate
Problem: we know the location of the objectand want to know where it will be projectedon the film (image plane).
y
z
x
Camera Coordinate
System
Answer: 1. Transform the world coordinate to the camera coordinate 2. Perform the perspective transformation

ISAN-DSP GROUP
Image Geometry: How to compute a point on the imageplane from the world coordinate (cont.)
Lens center
x
y
(x,y)
z
(x,y,z) = Camera coordinate, (X,Y,Z) = World coordinate
Image plane (z=0)
Before using the perspective transformation, the world axes X-Y-Z must coincide with the camera axes x-y-z, (we need some transformations).
(X,Y,Z)X
Z
Y

ISAN-DSP GROUP
Image Geometry: Compute the camera coordinate fromthe world coordinate
X
Y
Z
World Coordinate System
y
z
x
Camera Coordinate
System
2
3
Gimbal center
1. Translate* by w0
Note : *perform on the frame
2. Pan the camera* (rotate about Z-axis)
4. Translate* by z = r
Steps from Gonzalez’s book
3. Tilt the camera* (rotate about X-axis)
5. Compute the perspective Tr.
1w 0
4r

ISAN-DSP GROUP
Formula from Gonzalez’s book
hh wGRCPc
Perspective tr.
Translate to the image planeCenter by z = r
Translate to thegimbal center w0
World coordinate
Camera coordinate
Image Geometry: Compute the camera coordinate fromthe world coordinate (cont.)
Rotate byPan (z)
and Tilt (x)
ISAN-DSP GROUP
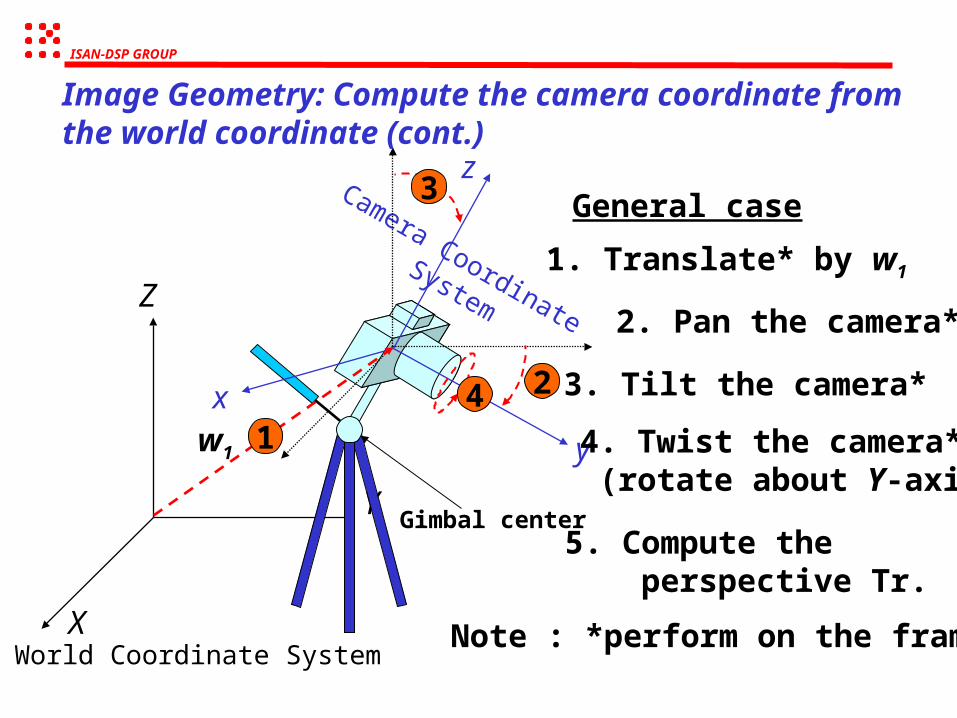
X
Y
Z
World Coordinate System
y
z
x
Camera Coordinate
System
2
3
4
Gimbal center
1. Translate* by w1
2. Pan the camera*
3. Tilt the camera*
Note : *perform on the frame
General case
4. Twist the camera* (rotate about Y-axis)
5. Compute the perspective Tr.
w11
Image Geometry: Compute the camera coordinate fromthe world coordinate (cont.)

ISAN-DSP GROUP
Image Geometry: Compute the camera coordinate fromthe world coordinate (cont.)
General case
hh wTRPc
Perspective tr.
Translate to the image
plane center w1
World coordinate
Camera coordinate
Rotate byPan (z), Tilt (x),
Twist (y)


















