ANATOMIC MODELING OF HUMAN BODIES USING PHYSICALLY-BASED MUSCLE
date post
21-Dec-2015Category
view
217download
0
Intro to Physically-Based Deformable Body Modeling
COMP 768 Physically-Based ModelingFall 2007 Course Lecture
Nick Dragan
November 6, 2007UNC Department of Computer Science

Outline
• Motivation, Background• Non-physically based (geometric) models• Physically based models
– Continuum mechanics, strain, stress– Lagrangian mesh based methods
• Method of Finite Differences (1)• Finite Element Method (2)• Boundary Element Method (3)• Mass-spring System (4)
– Others

Motivation
• Quest for visually and physically plausible animation of deformable objects and fluids– > beautiful dynamic scenes
• Many proposed methods– No one model is suited best for any given application– Take the application’s scenario into account
• Model representation• Range of physical parameters• Topological changes• Real-time or interactive• etc

Background
• Interdisciplinary field– Newtonian dynamics, continuum mechanics,
numerical computation, differential geometry, vector calculus, approximation theory
• Applications– Medicine: surgical simulation– Entertainment: digital art
• Movies and video games– Character animation, hair and cloth modeling
– Physical simulation– Elastic, plastic, melting objects, fluids, gases, interaction
between different media, tear and fracture

Eye Candy
• Videos– Material fracture
• O'Brien, J. F., Hodgins, J. K., "Animating Fracture." Communications of the ACM, July 2000, Vol. 43, No. 7, pp. 68-75.
– http://www.cs.berkeley.edu/b-cam/Papers/obrien-2000-AF/
– Interplay between rigid bodies and fluids• "Rigid Fluid: Animating the Interplay Between Rigid
Bodies and Fluid" Mark Carlson, Peter J. Mucha and Greg Turk. To appear in ACM SIGGRAPH 2004.
– http://www.cc.gatech.edu/~carlson/
– Cloth simulation• “Fast Collision Detection for Deformable Models using
Representative-Triangles” Sean Curtis, 2007.

Basic Definition
• Deformable object – Defined by
• Undeformed shape (equilibrium configuration/rest shape/initial shape)
• Set of material parameters that define how it deforms under applied forces
• Deformation– A mapping of the positions of every particle in
the original object to those in the deformed body

Deformation
• Modify Geometry
• Space Transformation
(x,y,z) (x,y,z)

Non-Physically-Based Methods
• Geometrically based
• Quick overview
– Splines & Patches (1)
– Free-Form Deformation (2)
– Subdivision Surfaces (3)

Splines & Patches (1)
• Curves & surfaces are represented by a set of control points
• Adjust shape by moving/adding/deleting control points or changing weights
• Precise specification & modification of curves & surfaces can be laborious

Free-Form Deformation (2)• FFD (space deformation) change the shape of an object by
deforming the space (lattice) in which the object lies within.
• Versatile: deformation is defined independent of the representation of geometry
• Barr’s space warp defines deformation in terms of geometric mapping (SIGGRAPH’84)
• Sederberg & Parry generalized space warp by embedding an object in a lattice of grids.
• Manipulating the nodes of these grids (cubes) induces deformation of the space inside of each grid and thus the object itself.

Free-Form Deformation (2)
• Linear Combination of Node Positions
n
II zyxbx,y,z
1
),,()( IX

• Thomas W. Sederberg, Scott R. Parry, Free-Form Deformation of
Solid Geometric Models, Computer Graphics (Proceedings of
SIGGRAPH 86). 20(4), pp. 151-160, 1986.

Generalized FFD (2)
• fi : Ui R3 where {Ui } is the set of 3D cells defined by the grid and fi mappings define how different object representations are affected by deformation
• Lattices with different sizes, resolutions and geometries (Coquillart, SIGGRAPH’90)
• Direct manipulation of curves & surfaces with minimum least-square energy (Hsu et al, SIGGRAPH’90)
• Lattices with arbitrary topology using a subdivision scheme (M & J, SIGGRAPH’96)

Subdivision Surfaces (3)
• Subdivision produces a smooth curve or surface as the limit of a sequence of successive refinements
• We can repeat a simple operation and obtain a smooth result after doing it an infinite number of times

Two Approaches• Interpolating
– At each step of subdivision, the points defining the previous level remain undisturbed in all finer levels
– Can control the limit surface more intuitively– Can simplify algorithms efficiently
• Approximating– At each step of subdivision, all of the points are moved (in general)– Can provide higher quality surfaces– Can result in faster convergence
Surface Rules
• For triangular meshes– Loop, Modified Butterfly
• For quad meshes– Doo-Sabin, Catmull-Clark, Kobbelt
• The only other possibility for regular meshes are hexagonal but these are not very common

Axioms of Continuum Mechanics
• A material continuum remains continuum under the action of forces.
• Stress and strain can be defined everywhere in the body.
• Stress at a point is related to the strain and the rate of change of strain with respect to time at the same point.
• Stress at any point in the body depends only on the deformation in the immediate neighborhood of that point.
• The stress-strain relationship may be considered separately, though it may be influenced by temperature, electric charge, ion transport, etc.

Revisiting Deformation
– Deformable object• Continuous connected subset M of R3 where m in M are
coordinates of points in the object
– Process of physically based deformation• Force applied to object -> it deforms• Point at location m moves to new location x(m,t) at time t• Deformation of M specified by displacement vector field u(m)
= x(m) – m
– Elastic strain• Measured in terms of spatial variations of displacement field
u = u(m) = (u,v,w)T

Strain
• Consider a 1D example: a string of an initial length L0 stretched to a length L
• The ratio = L/L0 is called the stretch ratio
• The ratios (L - L0)/L0 or (L - L0 )/L are strain measures
• Popular choices in computer graphics:
G is Green’s nonlinear strain tensor; C is its linearization, Cauchey’s linear strain tensor; del of u is the gradient of the displacement field

Stress• Internal stress tensor for each material point m is based on strain
at that point – measured as a force per unit area
• Normal stress, say xx acts on a cross section normal to the x-axis and in the direction of the x-axis. Similarly for yy
• Shear stress xy is a force per unit area acting in a plane cross section to the x-axis in the direction of y-axis. Similarly for yx
x
y
xx
yy
y
xxy
yx

Hooke’s Law• Use Hooke’s linear material
law
• For an infinitesimal strain in uniaxial stretching, a relation like = E (where E is a constant called Young’s Modulus) is valid within a certain range of stresses.
• For a Hookean material subjected to an infinitesimal shear strain is = G tan where G is another constant called the shear modulus or modulus of rigidity.

Continuum Model
• The full continuum model of a deformable object considers the equilibrium of a general buoy acted on by external forces. The object reaches equilibrium when its potential energy is at a minimum.
• The total potential energy of a deformable system is = - W
where is the total strain energy of the deformable object, and W is the work done by external loads on the deformable object.
• In order to determine the shape of the object at equilibrium, both are expressed in terms of the object deformation, which is represented by a function of the material displacement over the object. The system potential reaches a minimum when d w.r.t. displacement function is zero.

Time Integration
• To simulate a dynamic deformable object, need to know x(m,t) of all points in M
• Given x(m,t), we can display current state of the object at fixed time steps ∆t in the simulation– x(t0) -> x(∆t) -> x(2∆t) … = animated deformable object
• Calculate x(t) implicitly from the differential equations representing by Newton’s 2nd law of motion
• Integrating this system of equations will give the unknown vector field x and thus allow us to display the deformable object on the screen

Physically-Based Methods
• Different numerical methods and models can be used for solving the problem of physical deformation
• Method of Finite Differences• Finite Element Method• Boundary Element Method• Mass-spring System

Physically-Based Method 1
• Method of Finite Differences
• Finite Element Method
• Boundary Element Method
• Mass-spring System

Method of Finite Differences
• One of the earliest proposed methods– Terzopolous D., Platt J., Fleischer K.: Elastically Deformable
Models (SIGGRAPH ‘87)• Extended to plasticity and fracture
– Terzopolous D., Fleischer K.: Modeling inelastic deformation: viscoelasticity, plasticity, fracture (SIGGRAPH ‘88)
• Advantage– Easier to implement that FEM
• Disadvantage– Requires a regular mesh grid (constrains choices of
geometric representations)• Difficult to approximate an arbitrary object with a regular mesh• No local adaptation

Method of Finite Differences(continued)
• Algorithm– Potential energy stored in elastically deformable
body dictates its dynamics
– Deformation energy = weighted matrix norm of the difference between the metric tensors of the deformed and original shape, integrated over the entire continuum
– Continuous directional derivative of the elastic force is discretized using the Method of Finite Differences

Physically-Based Method 2
• Method of Finite Differences
• Finite Element Method
• Boundary Element Method
• Mass-spring System

Finite Element Methods
• One of the most popular methods to solve PDE’s on irregular grids
• General, versatile and accurate• But, computationally expensive and mathematically
sophisticated• Explicit FEM: simpler to understand and implement
– O’Brien J. F., Hodgins J. K.: Graphical modeling and animation of brittle fracture (SIGGRAPH ‘99)
– DEBUNNE G., DESBRUN M., CANI M.-P., BARR A.: Dynamic real-time deformations using space & time adaptive sampling (SIGGRAPH ‘01)
– M. Müller, J. Dorsey, L. McMillan, R. Jagnow, and B. Cutler, Stable Real-Time Deformations (SIGGRAPH ’02)
Finite Element Methods (continued)
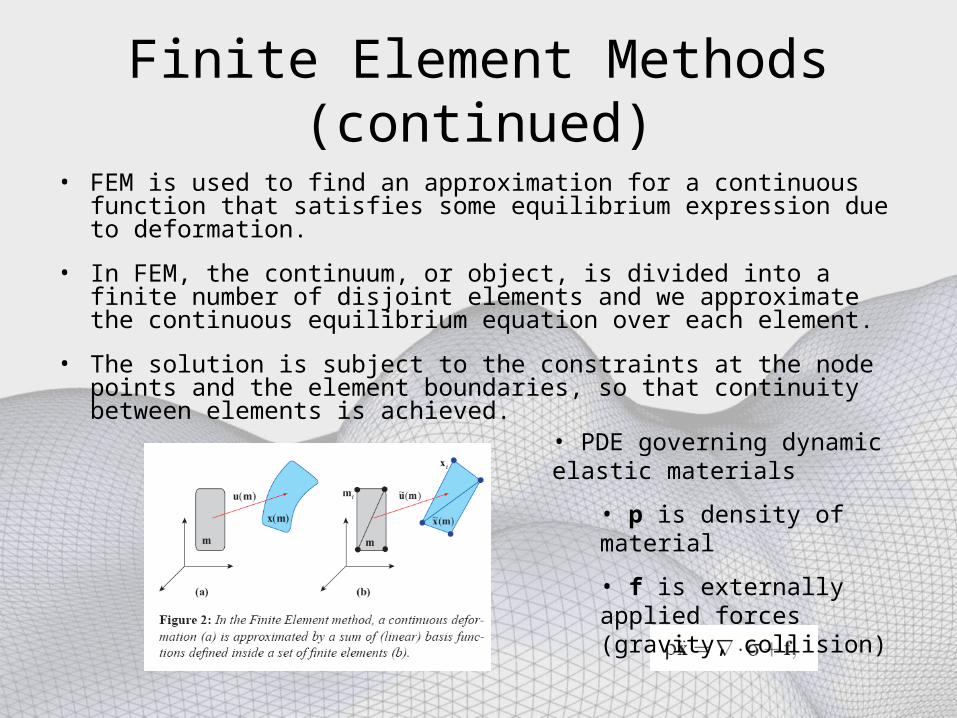
• FEM is used to find an approximation for a continuous function that satisfies some equilibrium expression due to deformation.
• In FEM, the continuum, or object, is divided into a finite number of disjoint elements and we approximate the continuous equilibrium equation over each element.
• The solution is subject to the constraints at the node points and the element boundaries, so that continuity between elements is achieved.
• PDE governing dynamic elastic materials
• p is density of material
• f is externally applied forces (gravity, collision)

General FEM• The system is discretized by representing the desired function within
each element as a finite sum of element-specific interpolation, or shape, functions.
• For example, in the case when the desired function is a scalar function (x,y,z), the value of at the point (x,y,z) is approximated by:
(x,y,z) hi(x,y,z) i
where the hi are the interpolation functions for the elements containing (x,y,z), and the i are the values of (x,y,z) at the element’s node points.
• Solving the equilibrium equation becomes a matter of determining the finite set of node values i that minimize the total potential energy in the body.
Basic Steps of Solving FEM1. Derive an equilibrium equation from the potential energy equation in
terms of material displacement.
2. Select the appropriate finite elements and corresponding interpolation functions. Subdivide the object into elements.
3. For each element, reexpress the components of the equilibrium equation in terms of interpolation functions and the element’s node displacements.
4. Combine the set of equilibrium equations for all the elements into a single system and solve the system for the node displacements for the whole object.
5. Use the node displacements and the interpolation functions of a particular element to calculate displacements (or other quantities) for points within the element.

Physically-Based Method 3
• Method of Finite Differences
• Finite Element Method
• Boundary Element Method
• Mass-spring System

Boundary Element Method
• Alternative to FEM– Good introduction: Hunter P.: FEM/BEM Notes. University of
Oakland, New Zealand, 2005.
• All computations done on the surface nodes of the elastic body instead of on its volume (interior)– Substantial speedup: 3D problem essentially reduced to 2D– Real-time deformation achieved
• D. James and D. Pai, Art Defo - Accurate Real Time Deformable Objects (SIGGRAPH ‘99)
• Limited to objects with linear elastic bodies, i.e. homogeneous interior
• Topological changes (fractures) more difficult to handle

Boundary Element Method
• Algorithm– Integral form of the equation of motion is transformed into a
surface integral by applying the Green-Gauss theorem
• More work– James D. L., Pai D. K.: Real time simulation of multizone
elastokinematic models (Intl. Conference on Robotics and Automation ‘02)
– JAMES D. L., PAI D. K.: Multiresolution Green’s function methods for interactive simulation of large-scale elastostatic objects. ACM Transactions on Graphics 22, 1 (2003)
Physically-Based Method 4
• Method of Finite Differences
• Finite Element Method
• Boundary Element Method
• Mass-spring System

Mass-spring System
• Simplest and most intuitive model• Discrete point masses (~particle system)
connected together by a network of massless springs
• Has been used to model skin, fat, muscle, cloth, snakes

Mass-Spring System
• Algorithm– There are N particles in the system and X represents
a 3N x 1 position vector:M (d2X/dt2) + C (dX/dt) + K X = F
– M, C, K are 3N x 3N mass, damping and stiffness matrices. M and C are diagonal and K is banded. F is a 3N-dimensional force vector.
– The system is evolved by solving:
dV/dt = M–1 ( - CV - KX + F) dX/dt = V

Mass-Spring System (continued)
• Advantages– Computationally efficient and handles large deformations
with ease• Disadvantages
– Not convergent; instead dependent on the mesh resolution and topology
– Not necessarily accurate: not built upon elasticity theory like FEM and FDM
• Spring constants chosen arbitrarily– Difficult to model continuum properties– Do not generalize easily to triangular or tetrahedral
meshes• Works
– D. Baraff, A. P. Witkin, Large Steps in Cloth Simulation, (SIGGRAPH ’98)

Other Physically-Based Methods
• Mesh-based– Finite Volume Method
• Mesh Free– Point-based Animations– Shape Matching– Modal Analysis
• Eulerian and Semi-Lagrangian

Open Research Issues
• Validation of physically accurate deformation– tissue, fabrics, material properties
• Achieving realistic & real-time deformation of complex objects– exploiting hardware & parallelism, hierarchical
methods, dynamics simplification, etc.
• Integrating deformable modeling with interesting “real” applications– various constraints & contacts, collision detection

References
[1] A. Nealen, M. Müller, R. Keiser, E. Boxerman, M. Carlson, Physically Based Deformable Models in Computer Graphics, Computer Graphics Forum, Vol. 25, issue 4, pages 809-836, previously appeared as EG STAR 2005.
[2] Dr. Ming Lin’s Slides “Introduction to Non-Rigid Body Dynamics”, COMP 768: Physically Based Modeling, Simulation and Animation, University of North Carolina at Chapel Hill.