Physically-based Modeling of Motion Pattern for Scorpion Robot
16
Physically)based Modeling of Motion Pattern for Scorpion Robot Science Day 2003 Darin Rajan, Purdue University, IN/ Education Associates Program Craig Slyfield, UC Berkeley, CA/ Education Associates Program Jeffrey Smith, NASAGAmes Research Center, Moffett Field, CA Richard Boyle, NASAGAmes Research Center, Moffett Field, CA Xander Twombly, NASAGAmes Research Center, Moffett Field, CA
-
Upload
darin-rajan -
Category
Documents
-
view
228 -
download
0
Transcript of Physically-based Modeling of Motion Pattern for Scorpion Robot
Physically)based-Modeling-of-Motion-Pattern-
for-Scorpion-Robot
Science&Day&2003
Darin&Rajan,&Purdue&University,&IN/&Education&Associates&ProgramCraig&Slyfield,&UC&Berkeley,&CA/&Education&Associates&ProgramJeffrey&Smith,&NASAGAmes&Research&Center,&Moffett&Field,&CARichard&Boyle,&NASAGAmes&Research&Center,&Moffett&Field,&CAXander&Twombly,&NASAGAmes&Research&Center,&Moffett&Field,&CA

Overview! What-is-the-Scorpion-Project?
" The-scorpion-is-an-eight)legged-robot-which-carries-many-uses.-Here-at-the-BioVis-Tech-Center,-we-are-trying-to-create-a-model-of-the-robot-that-accurately-demonstrates-its-motion-pattern.-We-are-doing-this-by-examining-the-data-from-the-real-model-and-comparing-it-to-the-data-of-the-simulation.
! What-NASA-expects-to-accomplish-with-it
" The-scorpion-has-many-added-functions-of-mobility-that-normal-wheeled-vehicles-do-not-have.-It-can-walk-over-complex-terrain-without-a-problem-and-can-be-remotely-controlled-to-reach-its-destination.-NASA-hopes-to-fully-utilize-these-functions-of-the-scorpion.--
! The-Motion-pattern-algorithm
" The-legs-move-in-an-out)of)phase-manner.-When-one-leg-is-“swinging,”-the-other-seven-legs-are-in-stance,-i.e.-they-are-not-moving.-The-robot’s-motion-pattern-are-based-on-the-following-parameters:-phase,-swing,-and-stance
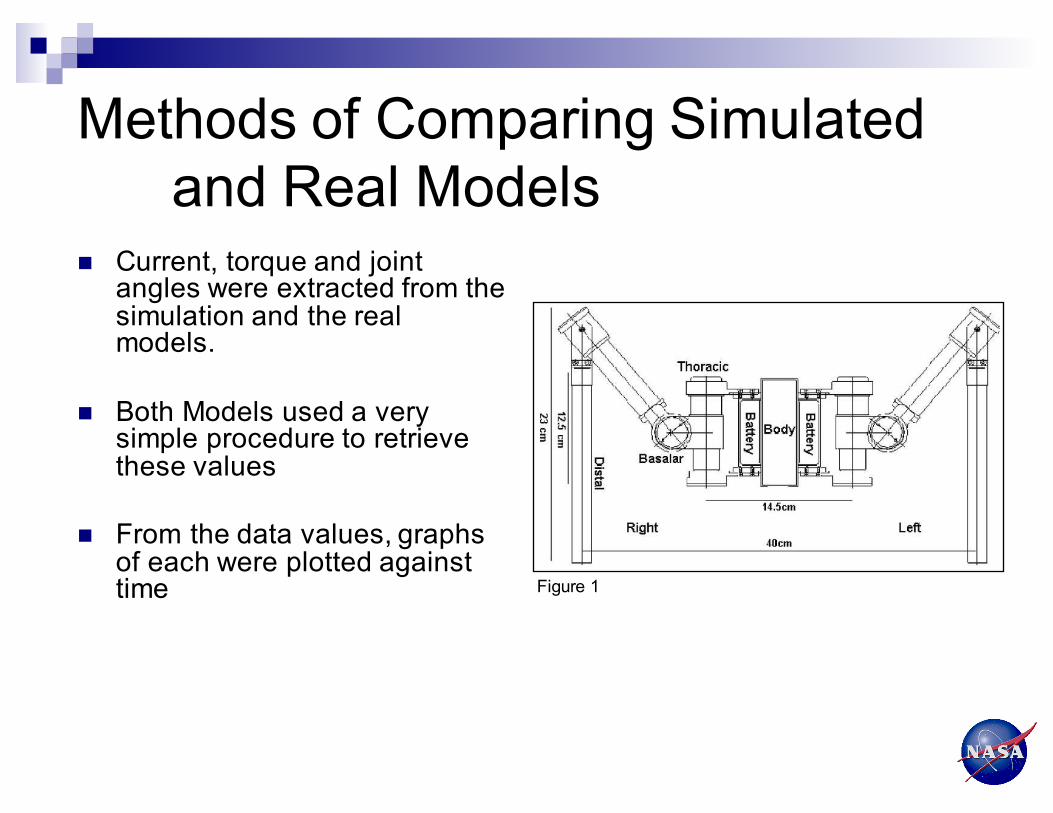
Methods-of-Comparing-Simulated-and-Real-Models
! Current,-torque-and-joint-angles-were-extracted-from-the-simulation-and-the-real-models.-
! Both-Models-used-a-very-simple-procedure-to-retrieve-these-values
! From-the-data-values,-graphs-of-each-were-plotted-against-time Figure-1

Real-Model-Data-Extraction
! The-scorpion-was-connected-to-a-computer-program-that-sampled-data-at-rates-between-1-Hz-and-10-Hz.
! Data-(current-and-angle-values)-were-extracted-from-the-robot-and-were-recorded-in-an-ASCI-text-file.--Later,-the-data-was-converted-into-a-3d-matrix-to-be-used-in-Matlab.-
! The-matrix-was-arranged-as-follows:--n-x-8-x-3-(n-being-the-total-number-of-samples,-8-being-the-number-of-legs,-and-3-being-the-number-of-motors-on-each-leg)

Simulation-Model-Data-Extraction! The-simulation-was-created-using-the-Arachi-Dynamics-Engine.-Arachi-is-a-privately-held-California-corporation-dedicated-in-developing-comprehensive-dynamic-motion-technology.-The-current-version-of-this-software-package-provides-a-basic-model-of-the-scorpion-using-simple,-primitive-shapes.-Below-are-the-basic-steps-taken-to-extract-data-from-the-model:-
# A-simple-fprintf statement-was-inserted-into-the-motion-pattern-algorithm-code.-
# It-sends-the-data-(torque-and-angle-values)-for-each-leg-to-a-specified-file-output-stream,-in-the-order-the-legs-are-moving.
# Three-text-files-are-used-to-record-the-data,-one-file-for-each-of-the-following-leg-segments:-Thoracic,-Basalar,-and-Distal.-
# The-text-file-contains-the-torque-and-joint-data-for-all-eight-legs-according-to-the-segment-of-the-leg.

Algorithms# Algorithm-used-in-real-model
# The-real-model-uses-a-type-of-pattern-generator-to-execute-the-motion-pattern-of-the-scorpion.-This-pattern-generator-relies-solely-on-the-frequency-of-steps.-It-then-determines-how-to-move-the-thoracic-and-basalar-joints-while-moving.--In-addition,-the-distal-joint-is-not-involved,-however-it-is-always-at-a-right-angle-to-the-ground.-
# Algorithm-used-in-simulated-model# The-simulated-model-calculates-the-angles-for-each-joint-
using-inverse-kinematics.-It-takes-the-lengths-specified-for-each-leg-segment-and-the-position-that-segment-needs-to-be-at,-plugs-it-into-a-sin)amplitude-function,-and-returns-and-stores-its-position-at-that-time.-It-also-implements-the-“Swing-and-Stance”-Technique-(shown-in-Figure-3),-which-has-the-legs-follow-the-above-pattern-in-Figure-2-in-an-out)of)phase-fashion.-
Figure-2
Figure-3

Model&ProcessingFrom-the-fully)developed,-basic-model-of-the-scorpion-in-Arachi,-we-now-have-a-
blueprint-of-the-scorpion’s-structure-that-can-be-translated-into-a-high-resolution-
model.-So-not-only-does-the-simulation-behave-like-the-real-model,-it-also-looks-
exactly-like-it.-Arachi-currently-is-in-the-process-of-creating-a-new-debug-viewer-
that-can-handle-the-high-resolution-3D-models-that-have-been-created-for-it.-A-
progression-of-the-steps-taken-have-been-outlined-below:
! Real-Model! Basic-3D-Model-in-Arachi
! High-Resolution-3D-Model-in-SolidWorks! High-Resolution-Model-Overlay

Basic-3D-Model-in-Arachi

High-Resolution-3D-Model-in-SolidWorks

High-Resolution-Model-OverlayThe-high-resolution-3D-model-in-SolidWorks-needs-to-be-converted-to-3D-Studio-Max-(3DS)-so-that-the-Arachi-NRG-Viewer-can-import-it.-The-image-does-not-lose-any-of-its-
properties-and-maintains-its-high-resolution-state.-
SolidWorks-does-not-offer-a-utility-for-a-straight-conversion-to-3DS,-so-a-File-type-translation-program-is-used-to-perform-this-conversion-from-Solid-Works-to-3DS.
Solid-WorksFile-Type-Translation-
Program 3D-Studio-Max

Complete-Set-of-Real-Model-Data
Current-and-Angle-Data-for-each-leg-on-the-Scorpion-Robot
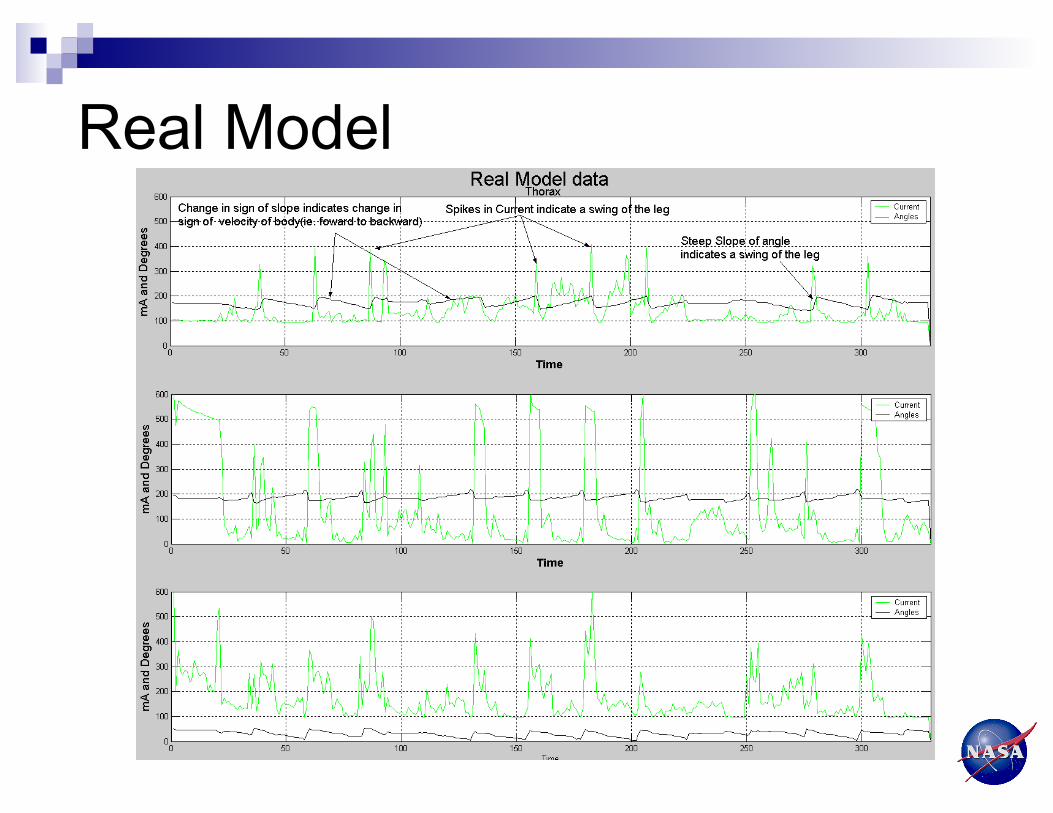
Real-Model
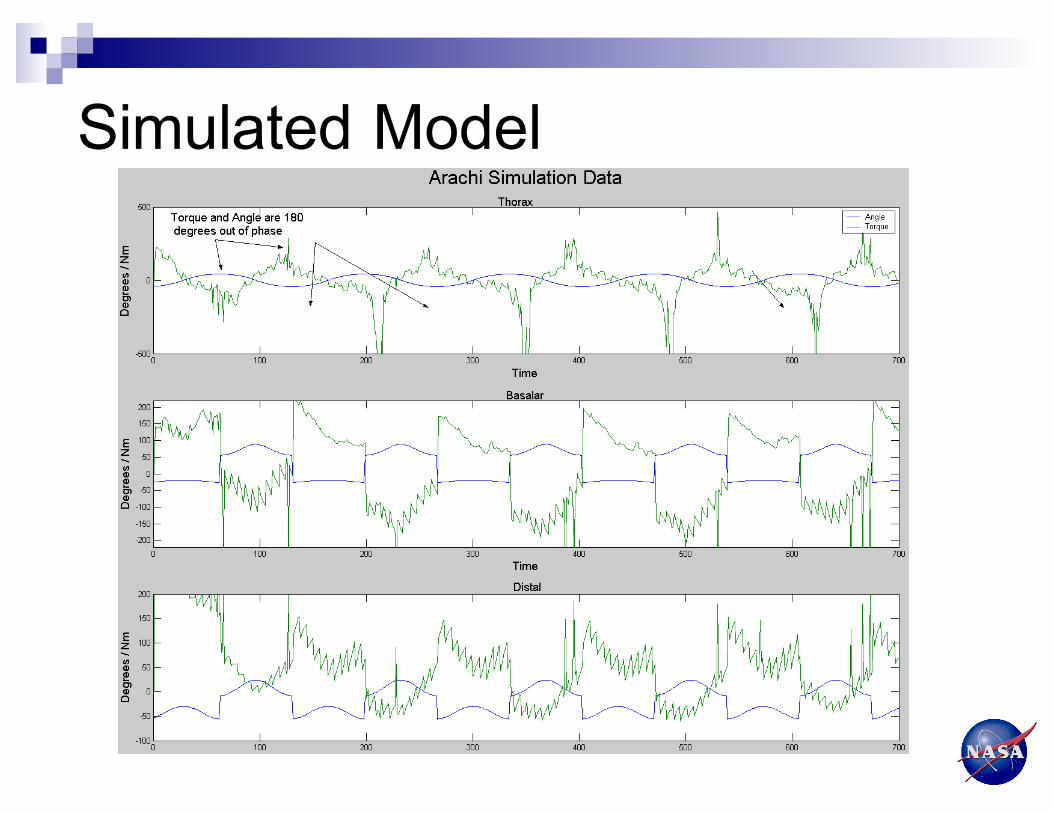
Simulated-Model

Direct-Comparison-of-Model-Data
Simulated-Model
Theoretical-Model
Real-Model

Analysis# Real-Model-Results
# From-this-model,-we-can-see-that-the-scorpion-is-very-efficient-in-terms-of-power-consumption.-This-is-shown-from-the-constant-change-in-the-motor-angles.-
# Theoretical-Model-Results
# This-model-was-derived-from-real-model-angle-data-and-the-theoretical-torque-equations-used-in-the-control-mechanism-of-the-robot.-
# Simulated-Model-Results
# Arachi-is-calculating-torques-similar-to-the-way-the-robot-does-but-the-amount-of-torque-required-in-Arachi-is-much-more-than-in-the-real-model.-Furthermore,--the-angular-position-of-the-joints-follow-a-perfect-sine-wave,-whereas-in-the-real-model,-“Swing-and-Stance”-have-two-different-slopes.-

Future-Work
! The-Arachi-simulation-uses-20-times-more-torque-than-necessary-in-order-to-make-the-robot-walk.-The-torques-on-both-models-need-to-match-up-to-one-another,-in-order-for-a-very-precise-simulation.
! A-relationship-between-torque-and-current-needs-to-be-realized.-This-can-be-achieved-by-analyzing-the-behavior-of-the-theoretical-and-real-model-data.




![Collaborative manufacturing with physical human–robot ... · operator, i.e., manual welding. In [25], a physically interactive controller is developed for a manipulator robot arm:](https://static.fdocuments.us/doc/165x107/5f121520ea0dfe1548265535/collaborative-manufacturing-with-physical-humanarobot-operator-ie-manual.jpg)