INTEGRATION OF A SPATIAL MAPPING SYSTEM USING GPS AND STEREO MACHINE VISION Ta-Te Lin, Wei-Jung...
36
INTEGRATION OF A SPATIAL MAPPING SYSTEM USING INTEGRATION OF A SPATIAL MAPPING SYSTEM USING GPS AND STEREO MACHINE VISION GPS AND STEREO MACHINE VISION Ta-Te Lin, Wei-Jung Chen, Fu-Ming Lu Ta-Te Lin, Wei-Jung Chen, Fu-Ming Lu Department of Bio-Industrial Department of Bio-Industrial Mechatronics Engineering, Mechatronics Engineering, National Taiwan University, National Taiwan University, Taipei, Taiwan, ROC Taipei, Taiwan, ROC
-
date post
20-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of INTEGRATION OF A SPATIAL MAPPING SYSTEM USING GPS AND STEREO MACHINE VISION Ta-Te Lin, Wei-Jung...

INTEGRATION OF A SPATIAL MAPPING SYSTEM USING INTEGRATION OF A SPATIAL MAPPING SYSTEM USING GPS AND STEREO MACHINE VISION GPS AND STEREO MACHINE VISION
Ta-Te Lin, Wei-Jung Chen, Fu-Ming LuTa-Te Lin, Wei-Jung Chen, Fu-Ming Lu
Department of Bio-Industrial Mechatronics Engineering,Department of Bio-Industrial Mechatronics Engineering,National Taiwan University,National Taiwan University,
Taipei, Taiwan, ROCTaipei, Taiwan, ROC

INTRODUCTIONINTRODUCTION
Precision Agriculture Precision Agriculture GPS and GISGPS and GIS Spatial Mapping MethodsSpatial Mapping Methods Stereo Machine VisionStereo Machine Vision

INTRODUCTIONINTRODUCTION
Direct MeasurementDirect Measurement Aerial PhotographyAerial Photography Satellite and Airborne ScanningSatellite and Airborne Scanning Vehicular-based Position DetectionVehicular-based Position Detection Field-walkingField-walking Etc.Etc.
SPATIAL MAPPING METHODSSPATIAL MAPPING METHODS

OBJECTIVESOBJECTIVES
To develop concepts and integrate a spatial To develop concepts and integrate a spatial mapping system that allows for sensor mapping system that allows for sensor fusion and establishment of basic GIS for fusion and establishment of basic GIS for farm management.farm management.
To implement the system with the capability To implement the system with the capability to visualize, retrieve and store field data.to visualize, retrieve and store field data.
To test the performance of the system and To test the performance of the system and its components. its components.
MATERIALS & METHODSMATERIALS & METHODS
System DescriptionSystem Description GPS and Electronic CompassGPS and Electronic Compass Coordinate TransformationCoordinate Transformation Stereo Machine VisionStereo Machine Vision System Integration System Integration

GPS
Electronic
Compass
Stereo Machine
Vision
Host Computer
Positioning Database
Image Database
Base Map
Map Layer 1
User Interface
Map Layer 2
Position
Orientation
Image
SCHEMATIC DIAGRAM OF THE SYSTEMSCHEMATIC DIAGRAM OF THE SYSTEM
SYSTEM DESCRIPTIONSYSTEM DESCRIPTION

SYSTEM COMPONENTSSYSTEM COMPONENTS
SYSTEM DESCRIPTIONSYSTEM DESCRIPTION
Trimble AgGPS 132Trimble AgGPS 132 TCM2-20 Electronic CompassTCM2-20 Electronic Compass Dual CamerasDual Cameras Matrox 4 Sight-II and Meteor IIMatrox 4 Sight-II and Meteor II Power SupplyPower Supply MIL Image Processing LibraryMIL Image Processing Library MapObjects (ESRI) LibraryMapObjects (ESRI) Library

TRIMBLE AgGPS 132TRIMBLE AgGPS 132
GPS AND ELECTRONIC COMPASS GPS AND ELECTRONIC COMPASS
NMEA-0183 string
RS-232 interface
DGPS capability
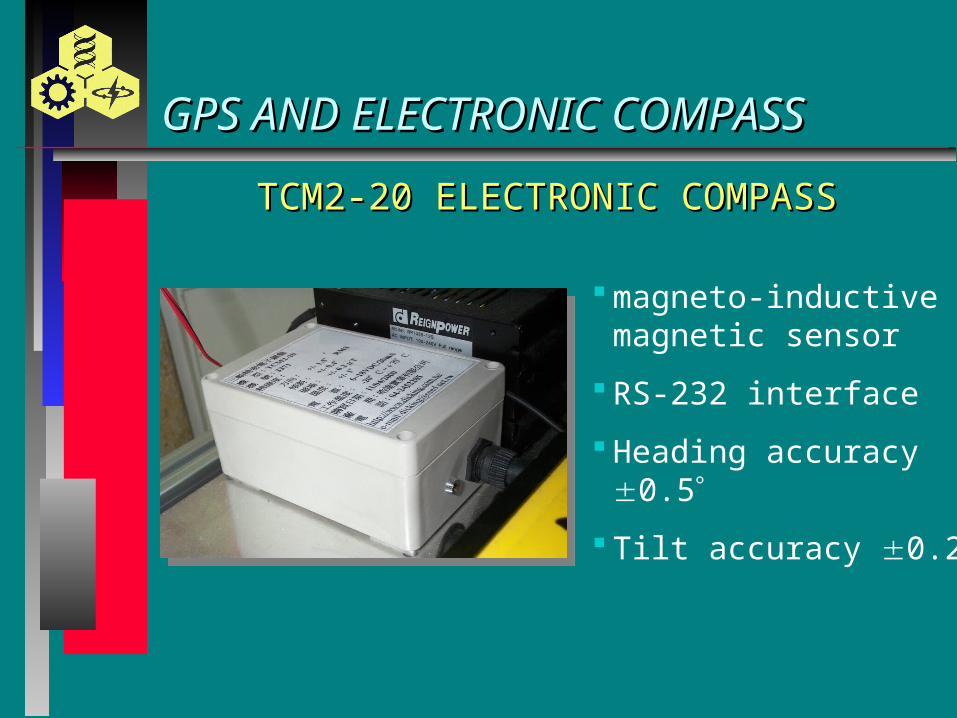
TCM2-20 ELECTRONIC COMPASSTCM2-20 ELECTRONIC COMPASS
GPS AND ELECTRONIC COMPASS GPS AND ELECTRONIC COMPASS
magneto-inductive magnetic sensor
RS-232 interface
Heading accuracy 0.5
Tilt accuracy 0.2

COORDINATE TRANSFORMATIONCOORDINATE TRANSFORMATION
Co
ord
ina
te
Co
nv
ers
ion
WGS84 Spheroid Coordinates
Transverse Mercator projections
WGS84 Cartesian Coordinates
TWD67Cartesian Coordinates
TWD67 Spheroid Coordinates
GPS NMEA-0183 string
Ma
p
Pro
jec
tion

STEREO MACHINE VISION BASICSSTEREO MACHINE VISION BASICS
STEREO MACHINE VISIONSTEREO MACHINE VISION
Z
P(X,Z)
X
B
Xl Xr
f
Z
Imaging plane
)x(xw
rfBZ
lr

STEREO MACHINE VISION SYSTEMSTEREO MACHINE VISION SYSTEM
STEREO MACHINE VISIONSTEREO MACHINE VISION
Two JAI MCL-1500 Camera
640x480 Resolution
NTSC Signal
Focal Length: 5.8~58mm

STEREO MACHINE VISION SYSTEMSTEREO MACHINE VISION SYSTEM
STEREO MACHINE VISIONSTEREO MACHINE VISION
Matrox 4 Sight-II
Celeron 566Mhz, 64MB RAM, 6GB HD, Windows NT 4.0
Matrox Meteor II Image Processing Board

SOFTWARE FUNCTIONAL MODULESSOFTWARE FUNCTIONAL MODULES
SYSTEM INTEGRATIONSYSTEM INTEGRATION
Data Acquisition Module
GPS
Dual Cameras
Electronic Compass
RS-232 I/O
NMEA-0183 String
Parsing
MIL Imaging Processing Library
Mapping Module
Image Processing Module
Database Management
Module
Coordinate Transformation MapObjects
Pattern Matching
Range Estimation
User Interface
Positioning database
Image database

HARDWARE INTEGRATIONHARDWARE INTEGRATION
SYSTEM INTEGRATIONSYSTEM INTEGRATION

RESULTSRESULTS
Performance of the GPS Performance of the GPS Distance Measurement Distance Measurement Overall System Performance Overall System Performance Spatial Mapping and RetrievalSpatial Mapping and Retrieval

PERFORMANCE OF THE GPSPERFORMANCE OF THE GPS
-25
-20
-15
-10
-5
0
5
10
15
20
25
-25 -20 -15 -10 -5 0 5 10 15 20 25
Easting Error (m)
Nor
thin
g E
rror
(m
)
-25
-20
-15
-10
-5
0
5
10
15
20
25
-25 -20 -15 -10 -5 0 5 10 15 20 25
Easting Error (m)
Nor
thin
g E
rror
(m
)
Error in sampling point location using AgGPS 132 without differential correction

PERFORMANCE OF THE GPSPERFORMANCE OF THE GPS
-25
-20
-15
-10
-5
0
5
10
15
20
25
-25 -20 -15 -10 -5 0 5 10 15 20 25
Easting Error (m)
Nor
thin
g E
rror
(m
)
-25
-20
-15
-10
-5
0
5
10
15
20
25
-25 -20 -15 -10 -5 0 5 10 15 20 25
Easting Error (m)
Nor
thin
g E
rror
(m
)
Error in sampling point location using AgGPS 132 with differential correction

DISTANCE MEASUREMENTDISTANCE MEASUREMENTError of distance estimation using the stereo machine vision system with f = 5.8 mm and B = 230 mm
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)

DISTANCE MEASUREMENTDISTANCE MEASUREMENTError of distance estimation using the stereo machine vision system with f = 58.0 mm and B = 230 mm
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100Distance (m)
Abs
olut
e E
rror
(m
)
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100Distance (m)
Abs
olut
e E
rror
(m
)

DISTANCE MEASUREMENTDISTANCE MEASUREMENTError of distance estimation using the stereo machine vision system with f = 5.8 mm and B = 430 mm
0
2
46
8
10
12
1416
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
2
46
8
10
12
1416
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)

DISTANCE MEASUREMENTDISTANCE MEASUREMENTError of distance estimation using the stereo machine vision system with f = 58.0 mm and B = 430 mm
0
2
4
6
810
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
2
4
6
810
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)

DISTANCE MEASUREMENTDISTANCE MEASUREMENTComparisons of errors of distance estimation
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100Distance (m)
Abs
olut
e E
rror
(m
)
0
2
46
8
10
12
1416
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
2
4
6
810
12
14
16
18
20
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
f=5.8, B=230mm f=58.0, B=230mm
f=5.8, B=430mm f=58.0, B=430mm

OVERALL SYSTEM PERFORMANCE OVERALL SYSTEM PERFORMANCE Error of distance estimation of the integrated spatial mapping system (f = 5.8 mm, B=230mm).
0
5
10
15
20
25
30
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
5
10
15
20
25
30
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)

OVERALL SYSTEM PERFORMANCE OVERALL SYSTEM PERFORMANCE Error of distance estimation of the integrated spatial mapping system (f = 5.8 mm, B=230mm).
0
5
10
15
20
25
30
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)
0
5
10
15
20
25
30
0 20 40 60 80 100
Distance (m)
Abs
olut
e E
rror
(m
)

OVERALL SYSTEM PERFORMANCE OVERALL SYSTEM PERFORMANCE Comparison with the Aerial Mapping Method

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALThe user interface of the spatial mapping system

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALThe user interface of the spatial mapping system

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALRetrieved image and indication of its scope on the map

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALRelocating field objects and creating new map layer

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALRelocating field objects and creating new map layer

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALBase field map of TARI experimental paddy field

SPATIAL MAPPING AND RETRIEVALSPATIAL MAPPING AND RETRIEVALMap layer showing scopes of saved image pairs

CONCLUSIONSCONCLUSIONS
An integrated spatial mapping system combining An integrated spatial mapping system combining GPS, electronic compass, and stereo machine GPS, electronic compass, and stereo machine vision is proposed and tested.vision is proposed and tested.
In the range of 100 m, the relative error of the In the range of 100 m, the relative error of the whole spatial mapping system was 6.8whole spatial mapping system was 6.82.6%.2.6%.
The integrated spatial mapping system provides a The integrated spatial mapping system provides a method to create digital maps incorporating image method to create digital maps incorporating image database.database.
The capability of retrieval and addition of range The capability of retrieval and addition of range information from image database allows for information from image database allows for dynamic and site-specific management of dynamic and site-specific management of agricultural sectors. agricultural sectors.

FUTURE WORKSFUTURE WORKS
System AccuracySystem Accuracy
System MobilitySystem Mobility
Database with Panoramic ImagesDatabase with Panoramic Images
3-Dimensional Reconstruction3-Dimensional Reconstruction

THANK YOUTHANK YOU
謝 謝謝 謝