
Heuristic Search - York University · 2014-03-09 · Why use heuristic search – 3! » Why is...
89
HS-1 © Gunnar Gotshalks Heuristic Search
Transcript of Heuristic Search - York University · 2014-03-09 · Why use heuristic search – 3! » Why is...
HS-1 © Gunnar Gotshalks!
Heuristic Search!!

HS-2 © Gunnar Gotshalks!
What is heuristic search!
» What is a heuristic search?!
HS-3 © Gunnar Gotshalks!
What is heuristic search – 2!
» What is a heuristic search?!
> Using problem domain information!
!
HS-4 © Gunnar Gotshalks!
Why use heuristic search!
» Why is heuristic search used?!

HS-5 © Gunnar Gotshalks!
Why use heuristic search – 2!
» Why is heuristic search used?!
> To make searching more efficient by concentrating on the most likely paths!– Best first paths ���

HS-6 © Gunnar Gotshalks!
Why use heuristic search – 3!
» Why is heuristic search used?!
> To make searching more efficient by concentrating on the most likely paths!– Best first paths ���
> As opposed to trying!– All paths equally – Random order
HS-7 © Gunnar Gotshalks!
Best-first search!
» Best-first search would be based on which basic search method?!
HS-8 © Gunnar Gotshalks!
Best-first search – 2!
» Best-first search would be based on which basic search method?!
> Breadth-first!
HS-9 © Gunnar Gotshalks!
Best-first search – 3!
» Best-first search would be based on which basic search method?!
> Breadth-first!
» Why?!
HS-10 © Gunnar Gotshalks!
Best-first search – 4!
» Best-first search would be based on which basic search method?!
> Breadth-first!
» Why?!> Need to have a set of paths from which to select
the best path to extend!
HS-11 © Gunnar Gotshalks!
Best-first search – 5!
» Best-first search would be based on which basic search method?!
> Breadth-first!
» Why?!> Need to have a set of paths from which to select
the best path to extend!
> Want to minimize work selecting paths to extend!
HS-12 © Gunnar Gotshalks!
Selecting a path!
◊ Given a set of paths P1 .. Pn!» What do you need to be able to select the best path
to extend? !
HS-13 © Gunnar Gotshalks!
Selecting a path – 2!
◊ Given a set of paths P1 .. Pn!» What do you need to be able to select the best path
to extend?!
> A cost is associated with each path!
HS-14 © Gunnar Gotshalks!
Selecting a path – 3!
◊ Given a set of paths P1 .. Pn!» What do you need to be able to select the best path
to extend?!
> A cost is associated with each path!
» How do you use the cost to select the best path?!
HS-15 © Gunnar Gotshalks!
Selecting a path – 4!
◊ Given a set of paths P1 .. Pn!» What do you need to be able to select the best path
to extend?!
> A cost is associated with each path!
» How do you use the cost to select the best path?!
> The path with the minimum cost would be the best one to extend !
HS-16 © Gunnar Gotshalks!
Path cost!
◊ Given a set of paths P1 .. Pn!» How is the cost of a path computed?!
HS-17 © Gunnar Gotshalks!
Path cost – 2!
◊ Given a set of paths P1 .. Pn!» How is the cost of a path computed?!
> Each edge has a cost associated with it.!
HS-18 © Gunnar Gotshalks!
Path cost – 3!
◊ Given a set of paths P1 .. Pn!» How is the cost of a path computed?!
> Each edge has a cost associated with it.!
> The cost of a path is the sum of the costs of the edges in the path!
HS-19 © Gunnar Gotshalks!
Path cost – 4!
◊ Given a set of paths P1 .. Pn!» How would the cost of a path computed?!
> Each edge has a cost associated with it.!> The cost of a path is the sum of the costs of the
edges in the path!
» What else?!
HS-20 © Gunnar Gotshalks!
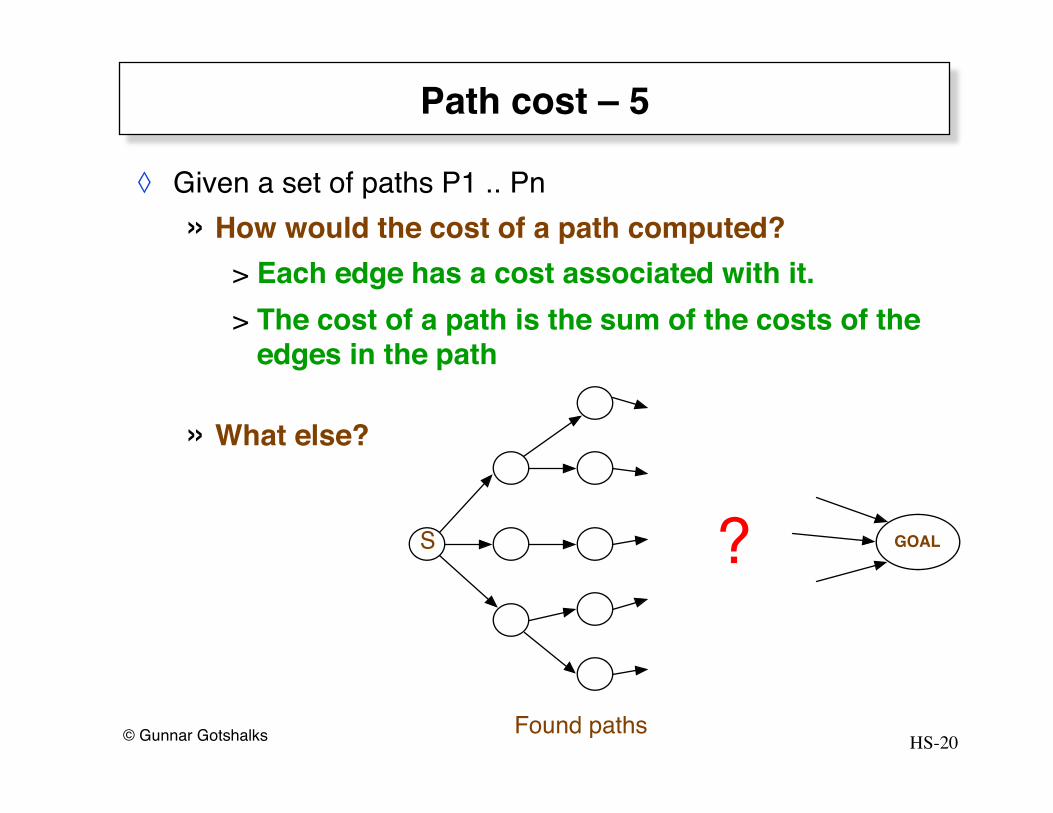
Path cost – 5!
◊ Given a set of paths P1 .. Pn!» How would the cost of a path computed?!
> Each edge has a cost associated with it.!> The cost of a path is the sum of the costs of the
edges in the path!
» What else?!
S
Found paths
GOAL?
HS-21 © Gunnar Gotshalks!
Path cost – 6!
◊ Given a set of paths P1 .. Pn!» How would the cost of a path computed?!
> Each edge has a cost associated with it.!> The cost of a path is the sum of the costs of the
edges in the path!
» What else?!> An estimate of the cost to get to the goal from
the vertex at the end of the path!
HS-22 © Gunnar Gotshalks!
Types of heuristic searches!
» In the textbook, what types of heuristic searches are discussed?!
HS-23 © Gunnar Gotshalks!
Types of heuristic searches – 2!
» In the textbook, what types of heuristic searches are discussed?!
> A*!– One of the best known algorithms in AI
HS-24 © Gunnar Gotshalks!
Types of heuristic searches – 3!
» In the textbook, what types of heuristic searches are discussed?!
> A*!– One of the best known algorithms in AI
> IDA*!– Iterative deepening A*
HS-25 © Gunnar Gotshalks!
Types of heuristic searches – 4!
» In the textbook, what types of heuristic searches are discussed?!
> A*!– One of the best known algorithms in AI
> IDA*!– Iterative deepening A*
> RBFS!– Recursive Best First Search
HS-26 © Gunnar Gotshalks!
Types of heuristic searches – 5!
» In the textbook, what types of heuristic searches are discussed?!
> A*!– One of the best known algorithms in AI
> IDA*!– Iterative deepening A*
> RBFS!– Recursive Best First Search
> RTA*!– Real-time A*
HS-27 © Gunnar Gotshalks!
Difference between search methods!
» What is the major difference between the different heuristic search methods?!
HS-28 © Gunnar Gotshalks!
Difference between search methods – 2!
» What is the major differences between the different heuristic search methods?!
> Different ways of trading off space versus time!– E.g. have linear space vs exponential space at a cost of
regenerating paths that were not saved
HS-29 © Gunnar Gotshalks!
Difference between search methods – 3!
» What is the major differences between the different heuristic search methods?!
> Different ways of trading off space versus time!– E.g. have linear space vs exponential space at a cost of
regenerating paths that were not saved
> Trading off optimality vs time!– Minimize computation time at the expense of quality of
solution
HS-30 © Gunnar Gotshalks!
Basics of A* algorithm!
◊ You are in the middle of a search and have a set of potential paths P1 .. Pn to explore.!» How do you select the best path to extend?!
HS-31 © Gunnar Gotshalks!
Basics of A* algorithm – 2!
◊ You are in the middle of a search and have a set of potential paths P1 .. Pn to explore.!» How do you select the best path to extend?!
> For the last node on each path have two costs!
» What are they?!
HS-32 © Gunnar Gotshalks!
Basics of A* algorithm – 3!
◊ You are in the middle of a search and have a set of potential paths P1 .. Pn to explore.!» How do you select the best path to extend?!
> For the last node on each path have two costs!
» What are they?!> (1) the real cost of following the path!
• g(n) where n is the last vertex in the path
HS-33 © Gunnar Gotshalks!
Basics of A* algorithm – 4!
◊ You are in the middle of a search and have a set of potential paths P1 .. Pn to explore.!» How do you select the best path to extend?!
> For the last node on each path have two costs!
» What are they?!> (1) the real cost of following the path!
– g(n) where n is the last vertex in the path ���
> (2) a heuristic estimate of the cost of the optimal extension of the path to the goal vertex!
• h(n) where n is the last vertex in the path
HS-34 © Gunnar Gotshalks!
Basics of A* algorithm – 5!
◊ You are in the middle of a search and have a set of potential paths P1 .. Pn to explore.!» How do you select the best path to extend?!
> For the last node on each path have two costs!– (1) the real cost of following the path
• g(n) where n is the last vertex in the path – (2) a heuristic estimate of the cost of the optimal
extension of the path to the goal vertex • h(n) where n is the last vertex in the path ���
» The estimated cost for the full path to the goal is!> f(n) = g(n) + h(n)!
HS-35 © Gunnar Gotshalks!
Basics of A* algorithm – 3!
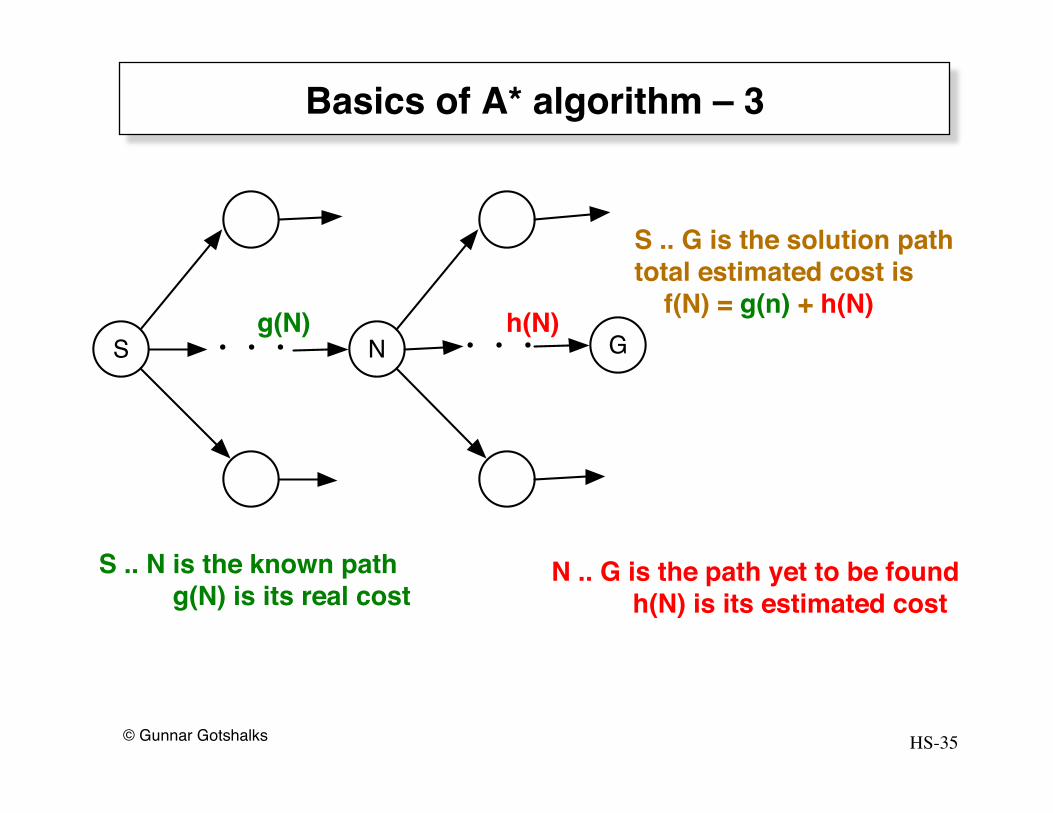
• • •S N G• • •
g(N)! h(N)!
S .. N is the known path! g(N) is its real cost!
S .. G is the solution path!total estimated cost is! f(N) = g(n) + h(N)!
N .. G is the path yet to be found! h(N) is its estimated cost!
HS-36 © Gunnar Gotshalks!
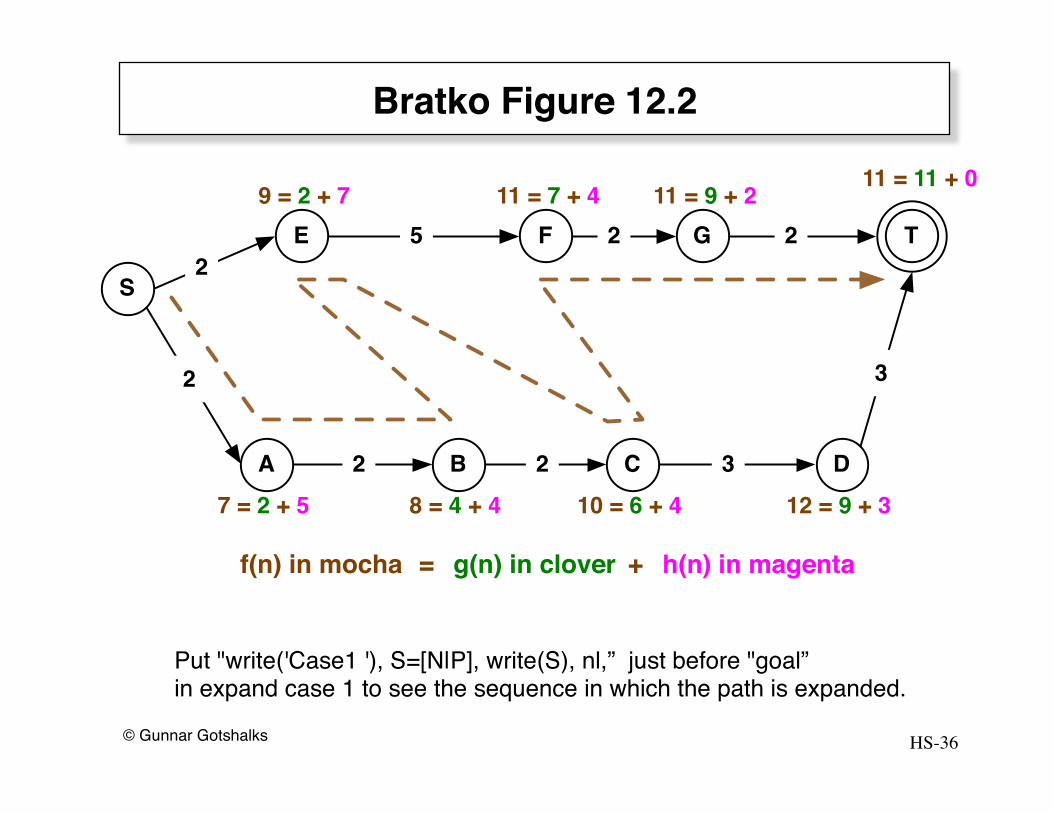
Bratko Figure 12.2!
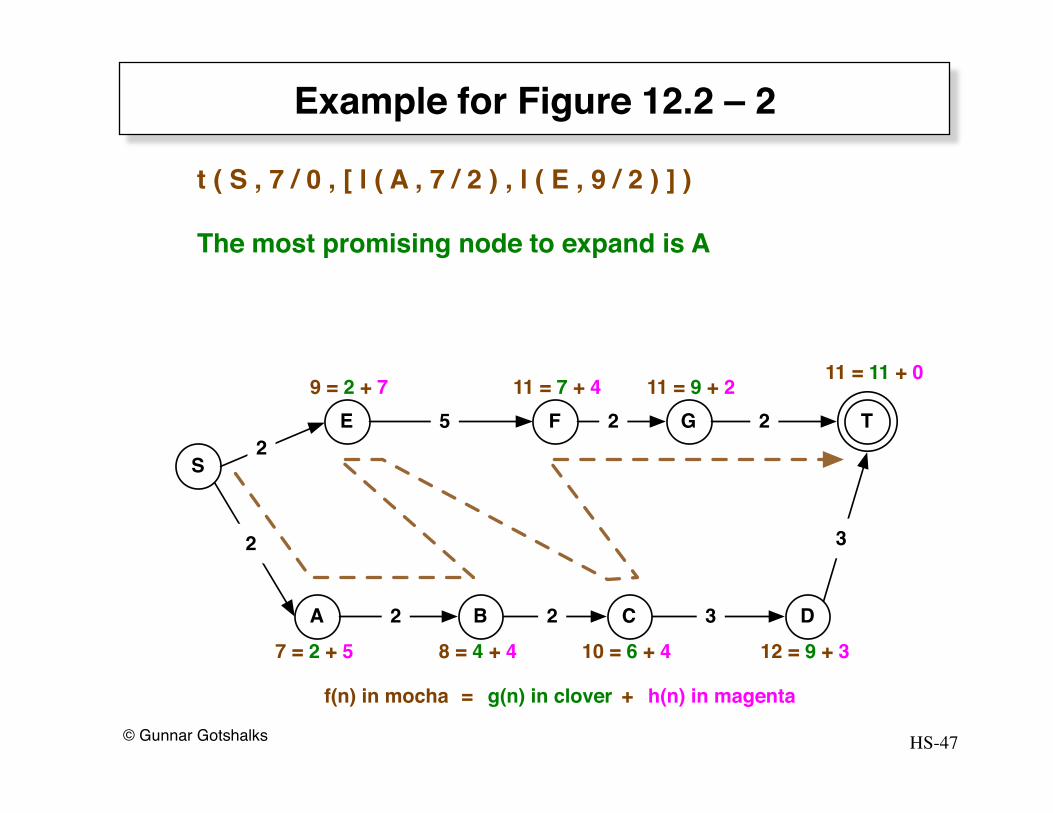
h(n) in magentag(n) in cloverf(n) in mocha +=
F
S
E G
A B C D
T2
5 2 2
2
2 2 3
3
7 = 2 + 5 8 = 4 + 4 10 = 6 + 4 12 = 9 + 3
9 = 2 + 7 11 = 7 + 4 11 = 9 + 211 = 11 + 0
Put "write('Case1 '), S=[N|P], write(S), nl,” just before "goal”!in expand case 1 to see the sequence in which the path is expanded.!

HS-37 © Gunnar Gotshalks!
A* data structures – leaf node!
◊ A leaf is a single node tree – l ( N , F / G )!
Lower case L!
HS-38 © Gunnar Gotshalks!
A* data structures – leaf node – 2!
◊ A leaf is a single node tree – l ( N , F / G )!» N is a node in the state-space!
HS-39 © Gunnar Gotshalks!
A* data structures – leaf node – 3!
◊ A leaf is a single node tree – l ( N , F / G )!» N is a node in the state-space !
» G = g(n) is the cost of the path to N!
HS-40 © Gunnar Gotshalks!
A* data structures – leaf node – 4!
◊ A leaf is a single node tree – l ( N , F / G )!» N is a node in the state-space !
» G is the cost of the path to N!
» F is f(N) = G + h(N)!
HS-41 © Gunnar Gotshalks!
A* data structures – tree!
◊ A tree – t ( N , F / G , Sub-trees)!
HS-42 © Gunnar Gotshalks!
A* data structures – tree – 2!
◊ A tree – t ( N , F / G , Sub-trees)!» N is a node in the state-space !
HS-43 © Gunnar Gotshalks!
A* data structures – tree – 3!
◊ A tree – t ( N , F / G , Sub-trees)!» N is a node in the state-space !
» G = g(n) is the cost of the path to N!

HS-44 © Gunnar Gotshalks!
A* data structures – tree – 4!
◊ A tree – t ( N , F / G , Sub-trees)!» N is a node in the state-space !
» G = g(n) is the cost of the path to N!
» F is the updated value of f(N)!> f-value of the most promising successor of N !
HS-45 © Gunnar Gotshalks!
A* data structures – tree – 5!
◊ A tree – t ( N , F / G , Sub-trees)!» N is a node in the state-space !
» G = g(n) is the cost of the path to N!
» F is the updated value of f(N)!> f-value of the most promising successor of N !
» Sub-trees is a list of the sub-trees from N!

HS-46 © Gunnar Gotshalks!
Example for Figure 12.2!
When S is expanded, the existing tree is represented as !
!t ( S , 7 / 0 , [ l ( A , 7 / 2 ) , l ( E , 9 / 2 ) ] )!
h(n) in magentag(n) in cloverf(n) in mocha +=
F
S
E G
A B C D
T2
5 2 2
2
2 2 3
3
7 = 2 + 5 8 = 4 + 4 10 = 6 + 4 12 = 9 + 3
9 = 2 + 7 11 = 7 + 4 11 = 9 + 211 = 11 + 0
HS-47 © Gunnar Gotshalks!
Example for Figure 12.2 – 2!
t ( S , 7 / 0 , [ l ( A , 7 / 2 ) , l ( E , 9 / 2 ) ] )!!The most promising node to expand is A!
h(n) in magentag(n) in cloverf(n) in mocha +=
F
S
E G
A B C D
T2
5 2 2
2
2 2 3
3
7 = 2 + 5 8 = 4 + 4 10 = 6 + 4 12 = 9 + 3
9 = 2 + 7 11 = 7 + 4 11 = 9 + 211 = 11 + 0
HS-48 © Gunnar Gotshalks!
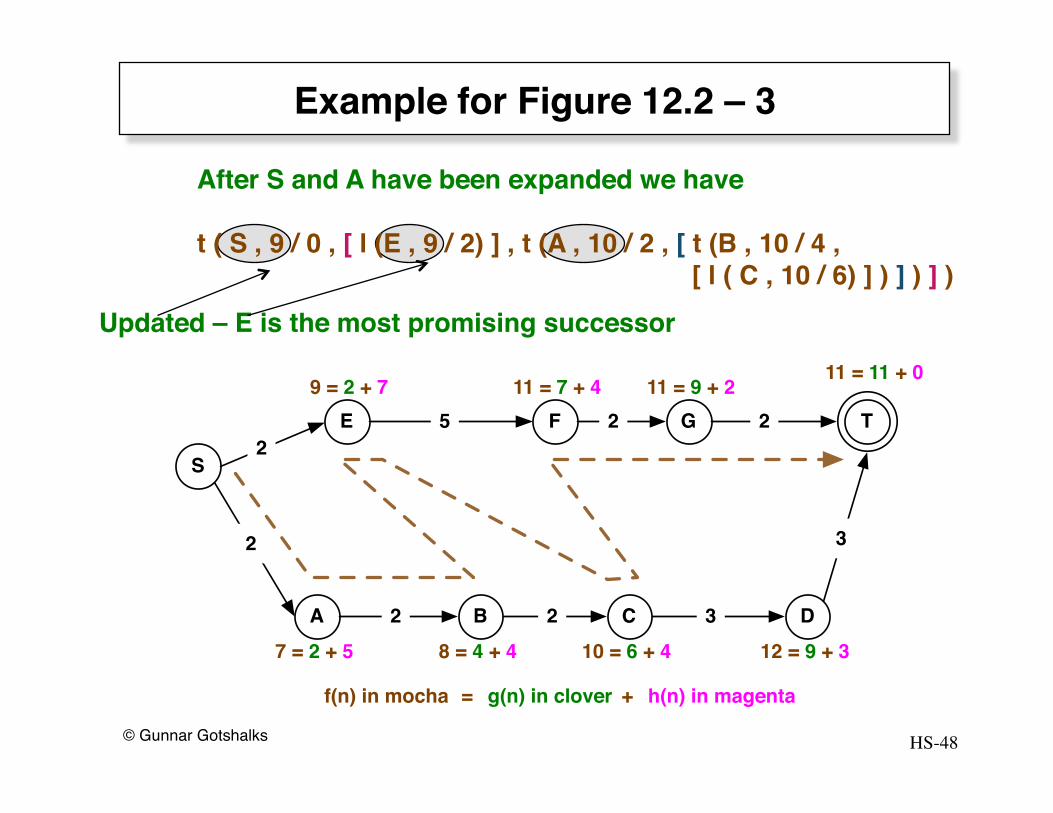
After S and A have been expanded we have!!t ( S , 9 / 0 , [ l (E , 9 / 2) ] , t (A , 10 / 2 , [ t (B , 10 / 4 , [ l ( C , 10 / 6) ] ) ] ) ] ) !!
Example for Figure 12.2 – 3!
Updated – E is the most promising successor!
h(n) in magentag(n) in cloverf(n) in mocha +=
F
S
E G
A B C D
T2
5 2 2
2
2 2 3
3
7 = 2 + 5 8 = 4 + 4 10 = 6 + 4 12 = 9 + 3
9 = 2 + 7 11 = 7 + 4 11 = 9 + 211 = 11 + 0
HS-49 © Gunnar Gotshalks!
Generalization of f-value definition!
◊ For a single node we have !» f (N) = g (N) + h (N)!
HS-50 © Gunnar Gotshalks!
Generalization of f-value definition – 2!
◊ For a single node we have !» f ( N ) = g ( N ) + h ( N )!
◊ For a tree with root node N we have, where the Sj are sub-trees of N !» f ( T ) = min ( f ( Sj ) )!
HS-51 © Gunnar Gotshalks!
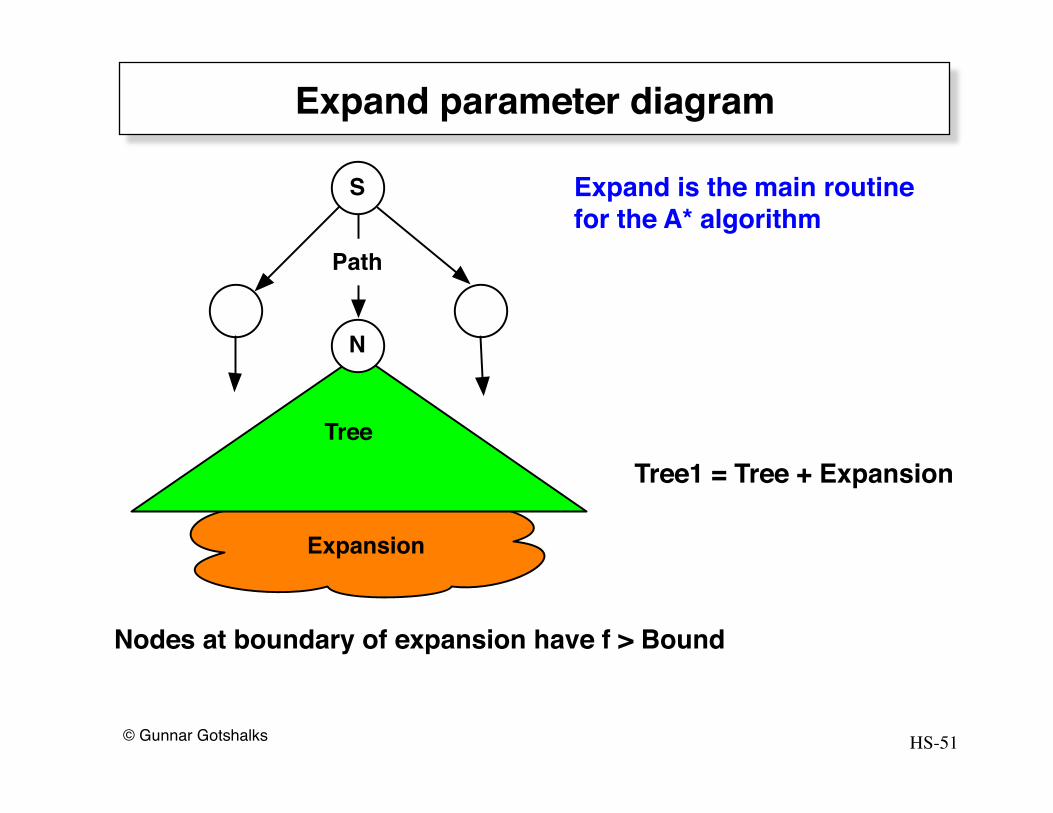
Expand parameter diagram!
Nodes at boundary of expansion have f > Bound!
Expansion
S
Tree
N
Path
Tree1 = Tree + Expansion!
Expand is the main routine!for the A* algorithm!
HS-52 © Gunnar Gotshalks!
Expand parameters for A*!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!
HS-53 © Gunnar Gotshalks!
Expand parameters for A* – 2!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!» Tree – subtree at the end of Path!
HS-54 © Gunnar Gotshalks!
Expand parameters for A* – 3!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!» Tree – subtree at the end of Path!» Bound – cost stops tree expansion!

HS-55 © Gunnar Gotshalks!
Expand parameters for A* – 4!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!» Tree – subtree at the end of Path!» Bound – cost stops tree expansion!» Tree1 – Tree expanded until f(N) > Bound!
HS-56 © Gunnar Gotshalks!
Expand parameters for A* – 5!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!» Tree – subtree at the end of Path!» Bound – cost stops tree expansion!» Tree1 – Tree expanded until f(N) > Bound!» Solved – “yes” when goal is found!
HS-57 © Gunnar Gotshalks!
Expand parameters for A* – 6!
◊ Prolog implementation for A* with the main routine!» Expand ( Path, Tree, Bound, Tree1, Solved, Solution )!
◊ Where!» Path – between start and start of subtree Tree!» Tree – subtree at the end of Path!» Bound – cost stops tree expansion!» Tree1 – Tree expanded until f(N) > Bound!» Solved – “yes” when goal is found!» Solution – path to goal when it is found!
HS-58 © Gunnar Gotshalks!
Admissibility!
» What does admissible mean?!
HS-59 © Gunnar Gotshalks!
Admissibility – 2!
» What does admissible mean?!
> Acceptable or valid!

HS-60 © Gunnar Gotshalks!
Admissibility – 3!
» What does admissible mean?!
> Acceptable or valid!– Especially as evidence in a court of law
HS-61 © Gunnar Gotshalks!
Admissibility of a search algorithm!
» When would a search algorithm be considered to be admissible?!
HS-62 © Gunnar Gotshalks!
Admissibility of a search algorithm – 2!
» When would a search algorithm be considered to be admissible?!
> If it is guaranteed to find an optimal solution!
HS-63 © Gunnar Gotshalks!
Admissibility of A*!
» Is A* admissible?!
HS-64 © Gunnar Gotshalks!
Admissibility of A* – 2!
» Is A* admissible?!> Yes, with necessary conditions!

HS-65 © Gunnar Gotshalks!
Admissibility of A* – 3!
» Is A* admissible?!> Yes, with necessary conditions!
» What are those conditions?!
HS-66 © Gunnar Gotshalks!
Admissibility of A* – 4!
» Is A* admissible?!> Yes, with necessary conditions!
» What are those conditions?!> h(N) ≤ h*(N) for all nodes in the state space!
HS-67 © Gunnar Gotshalks!
Admissibility of A* – 5!
» Is A* admissible?!> Yes, with necessary conditions!
» What are those conditions?!> h(N) ≤ h*(N) for all nodes in the state space!
» What is h*(N)?!
HS-68 © Gunnar Gotshalks!
Admissibility of A* – 6!
» Is A* admissible?!> Yes, with necessary conditions!
» What are those conditions?!> h(N) ≤ h*(N) for all nodes in the state space!
» What is h*(N)?!> The actual cost of the minimum cost path from
N to the goal!
HS-69 © Gunnar Gotshalks!
Admissibility of A* – 7!
» Is A* admissible?!> Yes, with necessary conditions!
» What are those conditions?!> h(N) ≤ h*(N) for all nodes in the state space!
» What is h*(N)?!> The actual cost of the minimum cost path from
N to the goal!
Pick an h(N) that is optimistic!
HS-70 © Gunnar Gotshalks!
Trivial Optimistic h(N)!
» What is a trivial optimistic h(N)?!
HS-71 © Gunnar Gotshalks!
Trivial optimistic h(N) – 2!
» What is a trivial optimistic h(N)?!> h(N) = 0!
HS-72 © Gunnar Gotshalks!
Trivial optimistic h(N) – 3!
» What is a trivial optimistic h(N)?!> h(N) = 0!
» What is the problem with this choice?!
HS-73 © Gunnar Gotshalks!
Trivial optimistic h(N) – 4!
» What is a trivial optimistic h(N)?!> h(N) = 0!
» What is the problem with this choice?!> Gives poor guidance for a search!
HS-74 © Gunnar Gotshalks!
Trivial optimistic h(N) – 5!
» What is a trivial optimistic h(N)?!> h(N) = 0!
» What is the problem with this choice?!> Gives poor guidance for a search!
> All possible expansion nodes are equally “good”!
HS-75 © Gunnar Gotshalks!
Optimal optimistic h(N)!
» What would be an optimal optimistic h(N)?!

HS-76 © Gunnar Gotshalks!
Optimal optimistic h(N) – 2!
» What would be an optimal optimistic h(N)?!> h(N) = h*(N)!
HS-77 © Gunnar Gotshalks!
Optimal optimistic h(N) – 3!
» What would be an optimal optimistic h(N)?!> h(N) = h*(N)!
» What is the problem in getting the optimal h(N)?!
HS-78 © Gunnar Gotshalks!
Optimal optimistic h(N) – 3!
» What would be an optimal optimistic h(N)?!> h(N) = h*(N)!
» What is the problem in getting the optimal h(N)?!> Finding the optimal h(N) is the essence of the
difficulty in finding a solution to a problem!

HS-79 © Gunnar Gotshalks!
Optimal optimistic h(N) – 4!
» What would be an optimal optimistic h(N)?!> h(N) = h*(N)!
» What is the problem in getting the optimal h(N)?!> Finding the optimal h(N) is the essence of the
difficulty in finding a solution to a problem!
In practice finding h(N) that minimizes the space that is searched and is admissible is the main difficulty!

HS-80 © Gunnar Gotshalks!
Distance between states!
◊ Many heuristics depend upon distance between states!
HS-81 © Gunnar Gotshalks!
Distance between states – 2!
◊ Many heuristics depend upon distance between states!> For example in the travelling salesman problem
it is the distance between cities!
HS-82 © Gunnar Gotshalks!
Distance between states – 3!
◊ Many heuristics depend upon distance between states!> For example in the travelling salesman problem
it is the distance between cities!> In the tile-puzzle it is the distance the tiles are
from the goal position!
!
L A T E
Y O U R
M I N D
P A R
HS-83 © Gunnar Gotshalks!
Common distance heuristics!
» What are two common distance heuristics?!
HS-84 © Gunnar Gotshalks!
Common distance heuristics – 2!
» What are two common distance heuristics?!
> Euclidean distance !
> Manhattan distance!
HS-85 © Gunnar Gotshalks!
Euclidean distance!
» What is Euclidean distance?!
HS-86 © Gunnar Gotshalks!
Euclidean distance – 2!
◊ The Euclidean distance between point (X1,Y1) and point (X2, Y2)!» Is the straight line distance between the points
based on Euclidean geometry!
D = (X1− X2)2 + (Y1−Y 2)2
HS-87 © Gunnar Gotshalks!
Manhattan distance!
» What is Manhattan distance?!
HS-88 © Gunnar Gotshalks!
Manhattan distance – 2!
◊ The Manhattan distance between point (X1, Y2) and point (X2,Y2)!» Is the sum of the horizontal and vertical distances
between the two points.!
D = abs(X1− X2)+ abs(Y1−Y 2)

HS-89 © Gunnar Gotshalks!
Manhattan distance – 3!
» Manhattan is one of the boroughs in New York with rectangular blocks. To travel between two points you can only move parallel to one or the other of the X or Y “axes” along the streets!
!L A T E
Y O U R
M I N D
P A R
The empty square can only!travel parallel to the axes!

![Informed [Heuristic] Search - University of Delawaredecker/courses/681s07/pdfs/04-Heuristic...Informed [Heuristic] Search Heuristic: “A rule of thumb, simplification, or educated](https://static.fdocuments.us/doc/165x107/5aa1e13c7f8b9a84398c48b6/informed-heuristic-search-university-of-delaware-deckercourses681s07pdfs04-heuristicinformed.jpg)
















