Heuristic Search Russell and Norvig: Chapter 4 CSMSC 421 – Fall 2005.
71
Heuristic Search Heuristic Search Russell and Norvig: Chapter 4 CSMSC 421 – Fall 2005
-
date post
22-Dec-2015 -
Category
Documents
-
view
229 -
download
4
Transcript of Heuristic Search Russell and Norvig: Chapter 4 CSMSC 421 – Fall 2005.

Heuristic SearchHeuristic Search
Russell and Norvig: Chapter 4
CSMSC 421 – Fall 2005

Modified Search Modified Search AlgorithmAlgorithm1. INSERT(initial-node,FRINGE)2. Repeat:
If FRINGE is empty then return failuren REMOVE(FRINGE)s STATE(n)If GOAL?(s) then return path or goal stateFor every state s’ in SUCCESSORS(s) Create a node n’ INSERT(n’,FRINGE)

Search AlgorithmsBlind search – BFS, DFS, uniform cost no notion concept of the “right direction” can only recognize goal once it’s achieved
Heuristic search – we have rough idea of how good various states are, and use this knowledge to guide our search

Best-first search
Idea: use an evaluation function f(n) for each node Estimate of desirability
Expand most desirable unexpanded nodeImplementation: fringe is queue sorted by descreasing order of desirability Greedy search A* search

HeuristicWebster's Revised Unabridged Dictionary (1913)
(web1913)Heuristic \Heu*ris"tic\, a. [Greek. to discover.] Serving to
discover or find out. The Free On-line Dictionary of Computing (15Feb98)
heuristic 1. <programming> A rule of thumb, simplification or educated guess that reduces or limits the search for solutions in domains that are difficult and poorly understood. Unlike algorithms, heuristics do not guarantee feasible solutions and are often used with no theoretical guarantee. 2. <algorithm> approximation algorithm.
From WordNet (r) 1.6 heuristic adj 1: (computer science) relating to or using a
heuristic rule 2: of or relating to a general formulation that serves to guide investigation [ant: algorithmic] n : a commonsense rule (or set of rules) intended to increase the probability of solving some problem [syn: heuristic rule, heuristic program]

Informed Search
Add domain-specific information to select the best path along which to continue searchingDefine a heuristic function, h(n), that estimates the “goodness” of a node n. Specifically, h(n) = estimated cost (or distance) of minimal cost path from n to a goal state. The heuristic function is an estimate, based on domain-specific information that is computable from the current state description, of how close we are to a goal

Greedy SearchGreedy Search
f(N) = h(N) greedy best-first

Robot NavigationRobot Navigation

Robot NavigationRobot Navigation
0 211
58 7
7
3
4
7
6
7
6 3 2
8
6
45
23 3
36 5 24 43 5
54 6
5
6
4
5
f(N) = h(N), with h(N) = Manhattan distance to the goal

Robot NavigationRobot Navigation
0 211
58 7
7
3
4
7
6
7
6 3 2
8
6
45
23 3
36 5 24 43 5
54 6
5
6
4
5
f(N) = h(N), with h(N) = Manhattan distance to the goal
7
0
What happened???
Greedy SearchGreedy Search
f(N) = h(N) greedy best-firstIs it complete?If we eliminate endless loops, yes
Is it optimal?

More informed searchMore informed search
We kept looking at nodes closer and closer to the goal, but were accumulating costs as we got further from the initial stateOur goal is not to minimize the distance from the current head of our path to the goal, we want to minimize the overall length of the path to the goal!Let g(N) be the cost of the best path found so far between the initial node and N
f(N) = g(N) + h(N)
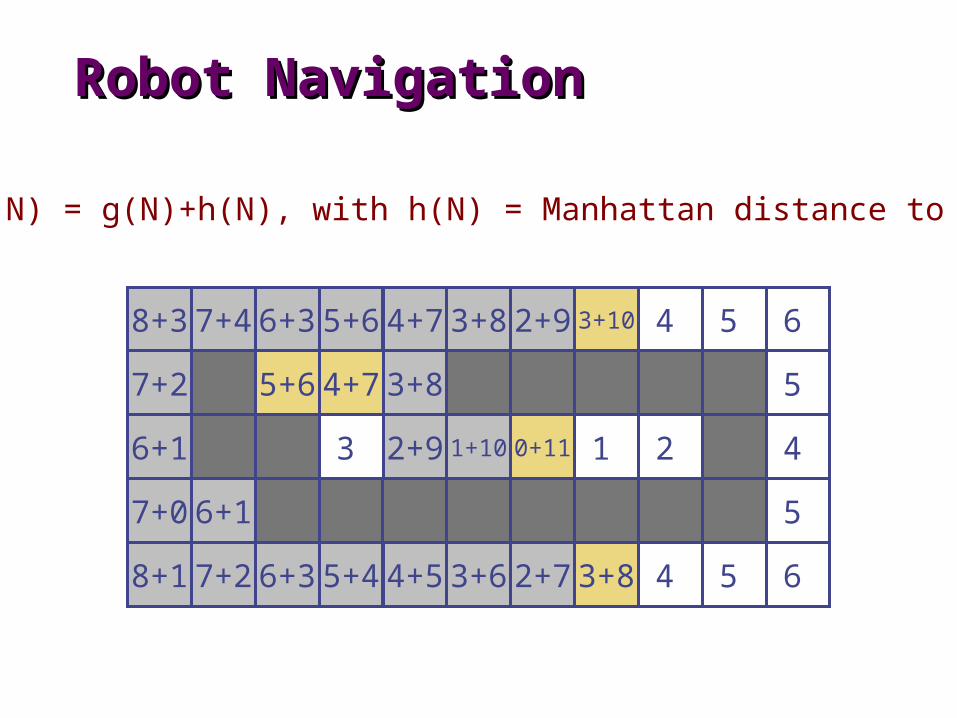
Robot NavigationRobot Navigation
f(N) = g(N)+h(N), with h(N) = Manhattan distance to goal
0 211
58 7
7
3
4
7
6
7
6 3 2
8
6
45
23 3
36 5 24 43 5
54 6
5
6
4
57+0
6+1
6+1
8+1
7+0
7+2
6+1
7+2
6+1
8+1
7+2
8+3
7+26+36+35+45+44+54+53+63+62+7
8+37+47+46+5
5+6
6+35+6
2+73+8
4+7
5+64+7
3+8
4+73+83+82+92+93+10
2+9
3+8
2+91+101+100+11

Can we Prove Anything?Can we Prove Anything?
If the state space is finite and we avoid repeated states, the search is complete, but in general is not optimalIf the state space is finite and we do not avoid repeated states, the search is in general not completeIf the state space is infinite, the search is in general not complete

Admissible heuristicAdmissible heuristic
Let h*(N) be the true cost of the optimal path from N to a goal node
Heuristic h(N) is admissible if:
0 h(N) h*(N)
An admissible heuristic is always optimistic

A* SearchA* Search Evaluation function:
f(N) = g(N) + h(N)
where: g(N) is the cost of the best path found so far to N h(N) is an admissible heuristic
Then, best-first search with this evaluation function is called A* search
Important AI algorithm developed by Fikes and Nilsson in early 70s. Originally used in Shakey robot.

Completeness & Optimality of Completeness & Optimality of A*A*
Claim 1: If there is a path from the initial to a goal node, A* (with no removal of repeated states) terminates by finding the best path, hence is: complete optimal
requirements: 0 < c(N,N’) Each node has a finite number of successors

Completeness of A*Completeness of A*
Theorem: If there is a finite path from the initial state to a goal node, A* will find it.

Proof of CompletenessProof of Completeness
Let g be the cost of a best path to a goal nodeNo path in search tree can get longer than g/, before the goal node is expanded

Optimality of A*Optimality of A*
Theorem: If h(n) is admissable, then A* is optimal.

Proof of OptimalityProof of Optimality
G1
N
G2
f(G1) = g(G1)
f(N) = g(N) + h(N) g(N) + h*(N)
f(G1) g(N) + h(N) g(N) + h*(N)
Cost of best path to a goal thru N

Heuristic FunctionHeuristic Function
Function h(N) that estimates the cost of the cheapest path from node N to goal node. Example: 8-puzzle
1 2 34 5 67 8
123
45
67
8
N goal
h(N) = number of misplaced tiles = 6

Heuristic FunctionHeuristic Function
Function h(N) that estimate the cost of the cheapest path from node N to goal node. Example: 8-puzzle
1 2 34 5 67 8
123
45
67
8
N goal
h(N) = sum of the distances of every tile to its goal position = 2 + 3 + 0 + 1 + 3 + 0 + 3 + 1 = 13

8-Puzzle8-Puzzle
4
5
5
3
3
4
3 4
4
2 1
2
0
3
4
3
f(N) = h(N) = number of misplaced tiles

8-Puzzle8-Puzzle
0+4
1+5
1+5
1+3
3+3
3+4
3+4
3+2 4+1
5+2
5+0
2+3
2+4
2+3
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles

8-Puzzle8-Puzzle
5
6
6
4
4
2 1
2
0
5
5
3
f(N) = h(N) = distances of tiles to goal

8-Puzzle8-Puzzle
1 2 3
4 5 6
7 8
12
3
4
5
67
8
N goal• h1(N) = number of misplaced tiles = 6 is admissible
• h2(N) = sum of distances of each tile to goal = 13 is admissible• h3(N) = (sum of distances of each tile to goal) + 3 x (sum of score functions for each tile) = 49 is not admissible

Robot navigationRobot navigation
Cost of one horizontal/vertical step = 1
Cost of one diagonal step = 2
f(N) = g(N) + h(N), with h(N) = straight-line distance from N to goal

Consistent HeuristicConsistent Heuristic
The admissible heuristic h is consistent (or satisfies the monotone restriction) if for every node N and every successor N’ of N:
h(N) c(N,N’) + h(N’)
(triangular inequality)
N
N’ h(N)
h(N’)
c(N,N’)

8-Puzzle8-Puzzle
1 2 3
4 5 6
7 8
12
3
4
5
67
8
N goal
• h1(N) = number of misplaced tiles
• h2(N) = sum of distances of each tile to goal
are both consistent

Robot navigationRobot navigation
Cost of one horizontal/vertical step = 1Cost of one diagonal step = 2
h(N) = straight-line distance to the goal is consistent

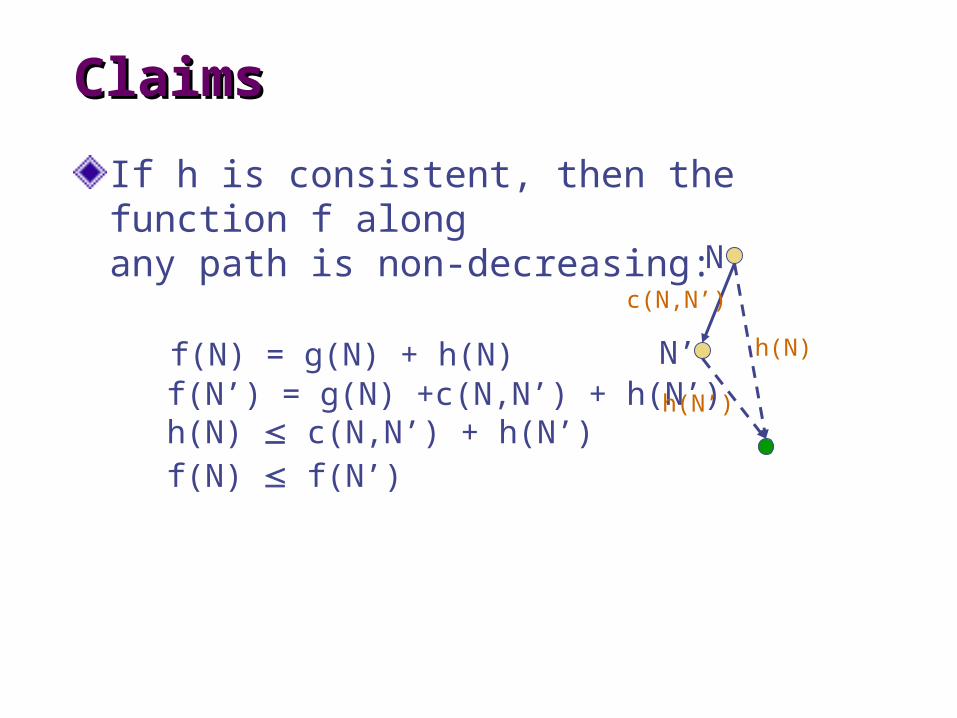
ClaimsClaims
If h is consistent, then the function f alongany path is non-decreasing:
f(N) = g(N) + h(N) f(N’) = g(N) +c(N,N’) + h(N’)
N
N’ h(N)
h(N’)
c(N,N’)
ClaimsClaims
If h is consistent, then the function f alongany path is non-decreasing:
f(N) = g(N) + h(N) f(N’) = g(N) +c(N,N’) + h(N’) h(N) c(N,N’) + h(N’) f(N) f(N’)
N
N’ h(N)
h(N’)
c(N,N’)

ClaimsClaims
If h is consistent, then the function f alongany path is non-decreasing:
f(N) = g(N) + h(N) f(N’) = g(N) +c(N,N’) + h(N’) h(N) c(N,N’) + h(N’) f(N) f(N’)
If h is consistent, then whenever A* expands a node it has already found an optimal path to the state associated with this node
N
N’ h(N)
h(N’)
c(N,N’)

Avoiding Repeated States in Avoiding Repeated States in A*A*
If the heuristic h is consistent, then:Let CLOSED be the list of states associated with expanded nodesWhen a new node N is generated: If its state is in CLOSED, then discard
N If it has the same state as another
node in the fringe, then discard the node with the largest f

HeuristicHeuristic AccuracyAccuracy
h(N) = 0 for all nodes is admissible and consistent. Hence, breadth-first and uniform-cost are particular A* !!!Let h1 and h2 be two admissible and consistent heuristics such that for all nodes N: h1(N) h2(N). Then, every node expanded by A* using h2 is also expanded by A* using h1.h2 is more informed than h1

Iterative Deepening A* Iterative Deepening A* (IDA*)(IDA*)
Use f(N) = g(N) + h(N) with admissible and consistent hEach iteration is depth-first with cutoff on the value of f of expanded nodes

8-Puzzle8-Puzzle
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=4
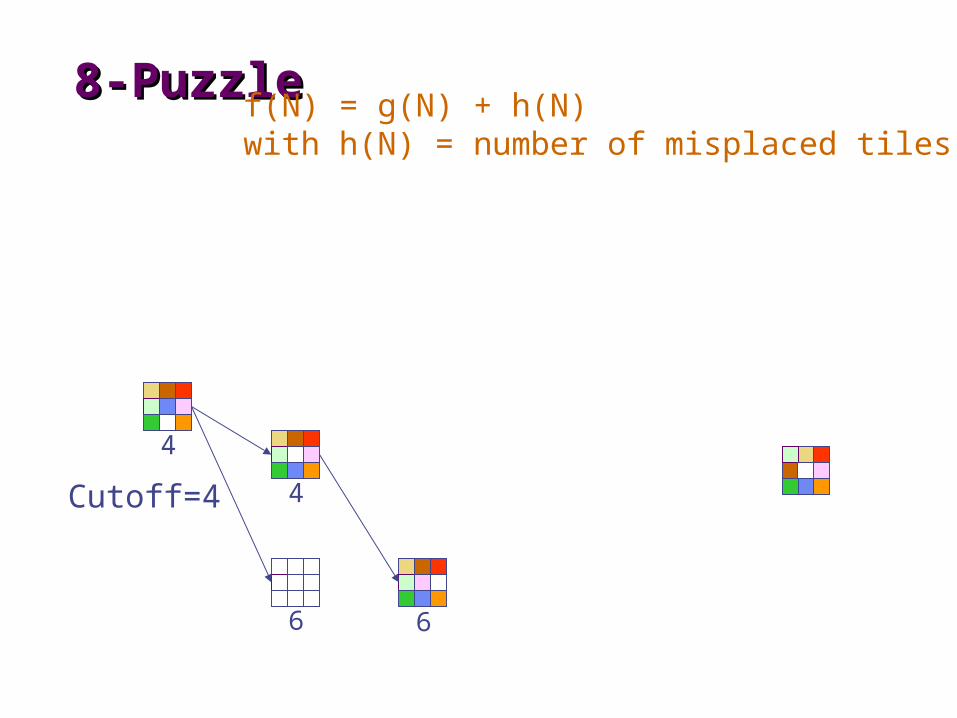
8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=4
6

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=4
6
5

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=4
6
5
5

4
8-Puzzle8-Puzzle
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=4
6
5
56

8-Puzzle8-Puzzle
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6
5

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6
5
7

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6
5
7
5

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6
5
7
5 5

8-Puzzle8-Puzzle
4
4
6
f(N) = g(N) + h(N) with h(N) = number of misplaced tiles
Cutoff=5
6
5
7
5 5

About HeuristicsAbout Heuristics
Heuristics are intended to orient the search along promising pathsThe time spent computing heuristics must be recovered by a better searchAfter all, a heuristic function could consist of solving the problem; then it would perfectly guide the searchDeciding which node to expand is sometimes called meta-reasoningHeuristics may not always look like numbers and may involve large amount of knowledge

What’s the Issue?What’s the Issue?
Search is an iterative local procedure
Good heuristics should provide some global look-ahead (at low computational cost)

Another approach…for optimization problems rather than constructing an optimal
solution from scratch, start with a suboptimal solution and iteratively improve it
Local Search Algorithms Hill-climbing or Gradient descent Potential Fields Simulated Annealing Genetic Algorithms, others…

Hill-climbing searchIf there exists a successor s for the current state n such that
h(s) < h(n) h(s) <= h(t) for all the successors t of n,
then move from n to s. Otherwise, halt at n. Looks one step ahead to determine if any successor is better than the current state; if there is, move to the best successor. Similar to Greedy search in that it uses h, but does not allow backtracking or jumping to an alternative path since it doesn’t “remember” where it has been.
Not complete since the search will terminate at "local minima," "plateaus," and "ridges."

Hill climbing on a surface of states
Height Defined by Evaluation Function

Hill climbing Hill climbing
Steepest descent (~ greedy best-first with no search) may get stuck into local minimum

Robot NavigationRobot Navigation
f(N) = h(N) = straight distance to the goal
Local-minimum problem

Examples of problems with HC
applet

Drawbacks of hill climbingProblems: Local Maxima: peaks that aren’t the
highest point in the space Plateaus: the space has a broad flat
region that gives the search algorithm no direction (random walk)
Ridges: flat like a plateau, but with dropoffs to the sides; steps to the North, East, South and West may go down, but a step to the NW may go up.
Remedy: Introduce randomness
Random restart.
Some problem spaces are great for hill climbing and others are terrible.

What’s the Issue?What’s the Issue?
Search is an iterative local procedure
Good heuristics should provide some global look-ahead (at low computational cost)

Hill climbing example 2 8 31 6 47 5
2 8 31 47 6 5
2 31 8 47 6 5
1 3 8 47 6 5
2
31 8 47 6 5
2
1 38 47 6 5
2start goal
-5
h = -3
h = -3
h = -2
h = -1
h = 0h = -4
-5
-4
-4-3
-2
f(n) = -(number of tiles out of place)

Example of a local maximum
1 2 5 7 48 6 3
1 2 5 7 48 6 3
1 2 5 7 48 6 3
1 2 5 7 48 6 3
1 2 5 7 48 6 3
-3
-4
-4
-4
0
start goal

Potential FieldsIdea: modify the heuristic functionGoal is gravity well, drawing the robot toward itObstacles have repelling fields, pushing the robot away from themThis causes robot to “slide” around obstaclesPotential field defined as sum of attractor field which get higher as you get closer to the goal and the indivual obstacle repelling field (often fixed radius that increases exponentially closer to the obstacle)

Does it always work?No.But, it often works very well in practiceAdvantage #1: can search a very large search space without maintaining fringe of possiblitiesScales well to high dimensions, where no other methods workExample: motion planningAdvantage #2: local method. Can be done online

Example: RoboSoccerAll robots have same field: attracted to the ball
Repulsive potential to other playersKicking field: attractive potential to the ball and local repulsive potential if clase to the ball, but not facing the direction of the opponent’s goal. Result is tangent, player goes around the ball.Single team: kicking field + repulsive field to avoid hitting other players + player position fields (paraboilic if outside your area of the field, 0 inside). Player nearest to the ball has the largest attractive coefficient, avoids all players crowding the ball.Two teams: identical potential fields.

Simulated annealingSimulated annealing (SA) exploits an analogy between the way in which a metal cools and freezes into a minimum-energy crystalline structure (the annealing process) and the search for a minimum [or maximum] in a more general system. SA can avoid becoming trapped at local minima.SA uses a random search that accepts changes that increase objective function f, as well as some that decrease it.SA uses a control parameter T, which by analogy with the original application is known as the system “temperature.”T starts out high and gradually decreases toward 0.

Simulated annealing (cont.)
A “bad” move from A to B is accepted with a probability
(f(B)-f(A)/T)e
The higher the temperature, the more likely it is that a bad move can be made.As T tends to zero, this probability tends to zero, and SA becomes more like hill climbingIf T is lowered slowly enough, SA is complete and admissible.

The simulated annealing algorithm

Simulated Annealing
applet
Successful application: circuit routing, traveling sales person (TSP)

Summary: Local Search Summary: Local Search AlgorithmsAlgorithms
Steepest descent (~ greedy best-first with no search) may get stuck into local minimum Better Heuristics: Potential Fields Simulated annealing Genetic algorithms

When to Use Search When to Use Search Techniques?Techniques?
The search space is small, and There is no other available
techniques, or It is not worth the effort to develop a
more efficient technique
The search space is large, and There is no other available
techniques, and There exist “good” heuristics

SummarySummary
Heuristic function Best-first search Admissible heuristic and A* A* is complete and optimal Consistent heuristic and repeated states Heuristic accuracy IDA*













![Informed [Heuristic] Search - University of Delawaredecker/courses/681s07/pdfs/04-Heuristic...Informed [Heuristic] Search Heuristic: “A rule of thumb, simplification, or educated](https://static.fdocuments.us/doc/165x107/5aa1e13c7f8b9a84398c48b6/informed-heuristic-search-university-of-delaware-deckercourses681s07pdfs04-heuristicinformed.jpg)



