height modernization using fitted geoid models and myrtknet
143
HEIGHT MODERNIZATION USING FITTED GEOID MODELS AND MYRTKNET SOEB BIN NORDIN UNIVERSITI TEKNOLOGI MALAYSIA
Transcript of height modernization using fitted geoid models and myrtknet

HEIGHT MODERNIZATION USING
FITTED GEOID MODELS AND MYRTKNET
SOEB BIN NORDIN
UNIVERSITI TEKNOLOGI MALAYSIA

HEIGHT MODERNIZATION USING
FITTED GEOID MODELS AND MYRTKNET
SOEB BIN NORDIN
A thesis submitted in fulfilment of the
requirements for the award of degree of Master of Science
(Geomatic Engineering)
Faculty of Geoinformation Science and Engineering
Universiti Teknologi Malaysia
August 2009

iii
DEDICATION
Teristimewa Buat
Keluarga Tersayang
Terima Kasih Untuk Segalanya

iv
ACKNOWLEDGMENTS
I wish to express my sincere appreciation to my thesis supervisor Associate Professor
Kamaludin Haji Mohd Omar for encouragement, guidance, critics and friendship. I
am also very thankful to Dr. Abdul Majid Kadir, former Geodesy Section Director,
Dr. Samad Hj Abu and Dr. Azhari Mohamed for their support in this research.
I would like to thank all staff of Seksyen Geodesi, Jabatan Ukur dan Pemetaan
Malaysia especially Mr. David Chang Leng Hua, Encik Amram Mamat, Encik
Riduan Mohamad, Encik Ismail Husin, Encik Wan Zulaini Abd. Razak and staff of
Unit Pemprosesan Data Geodetik dan MASS who have provided me important data
sets and assistance at various occasions. Their views and tips are useful indeed.
Above all, I am deeply grateful to my beloved wife Atun and our children for their
love, patience, support and understanding. Without their continued support, this thesis
would not have been the same as presented here.

v
ABSTRACT
The purpose of this study is to examine the strategies for rapid height determination
using the current Global Positioning System (GPS) technology. With steady
economic growth in Malaysia since 1998, more highways, federal and states road
have been built or have been widen. These development processes have somehow
destroyed, damaged or disturbed the levelling benchmarks located along the routes.
Currently the conventional method to require the levels of these benchmarks is costly
and time-consuming. This study focuses on the theory, computation method and
analysis of WMGeoid04 and WMGeoid06A revised models using GPS Virtual
Reference Stations (VRS) technique for rapid height determination. The computation
of WMGeoid04 and WMGeoid06A precise fitted geoid models was based on least
squares collocation using the existing gravimetric geoid and newly observed
geometric geoid separation. Analysis of the precise fitted geoid models have shown
that the formal fitting errors were less than 4 cm. In addition, the validation process
with external data sets has achieved 5 cm accuracy in terms of Root Mean Square
(RMS). Assessment of GPS station coordinate consistency indicates the achievable
accuracy (at 95% confidence region) from VRS technique is better than 3 cm
horizontally, and better than 6 cm vertically. Further analysis using orthometric
height comparison between published and derived height of levelling benchmarks
using the combination of fitted geoid models with VRS technique have shown that
the differences are better than 6 cm. The results showed that GPS levelling with
precise fitted geoid model and VRS technique is relatively better than second class
levelling survey at a lesser cost and time, and could be used to update existing
levelling benchmark and establishing a new levelling routes in Malaysia.

vi
ABSTRAK
Kajian ini dilakukan bertujuan untuk meneliti strategi penentuan ketinggian secara
pantas dengan menggunakan teknologi Global Positioning System (GPS) semasa.
Dengan peningkatan ekonomi yang berterusan sejak 1998, pembinaan dan pelebaran
rangkaian lebuhraya, jalan persekutuan dan negeri telah dilakukan. Proses
pembangunan ini walaubagaimana pun telah memusnah, merosakan atau
mengganggu tanda aras yang dibina di sepanjang laluan tersebut. Pada masa kini,
proses ukuran semula secara konvensional adalah tidak praktikal, di mana akan
melibatkan kos yang tinggi serta memerlukan masa yang panjang untuk disudahkan.
Kajian ini memberi fokus utama kepada teori, kaedah penghitungan dan analisa
model geoid jitu kesepadanan WMGeoid04 dan model geoid tersemak WMGeoid06A
menggunakan kaedah GPS Virtual Reference Stations (VRS) untuk tujuan penentuan
ketinggian secara pantas. Hitungan model geoid jitu kesepadanan iaitu WMGeoid04
dan WMGeoid06A adalah berasaskan kaedah least squares collocation dengan
menggunakan model geoid gravimetrik sedia ada dan pisahan geoid geometrik yang
baru. Analisa keatas model geoid jitu kesepadanan telah menunjukkan bahawa selisih
kesepadanan formal adalah kurang dari 4 sm. Tambahan dari itu, proses validasi
dengan menggunakan set data berlainan telah mencapai ketepatan 5 sm berdasarkan
Root Mean Square (RMS). Penilaian keatas koordinat GPS telah menunjukkan
bahawa ketepatan (darjah kebersanan 95%) lebih baik dari 3 sm untuk komponen
mendatar dan 6 sm bagi komponen pugak telah dicapai dengan menggunakan kaedah
VRS. Analisa selanjutnya adalah membandingkan nilai ketinggian tanda aras antara
nilai terbitan dan nilai hitungan dengan menggunakan kombinasi model geoid jitu
kesepadanan dan koordinat dari kaedah VRS, telah menunjukan kesepadanan adalah
lebih baik dari 6 sm. Hasil kajian menunjukkan ukuran aras GPS dengan
menggunakan model geoid jitu kesepadanan dan kaedah VRS adalah lebih baik dari
ukuran aras relatif kelas kedua pada kos lebih rendah dengan masa yang singkat.
Kaedah ini boleh di gunakan untuk mengemaskinikan tanda aras sedia ada dan
mewujudkan laluan ukuran aras baru di Malaysia

vii
TABLE OF CONTENT
CHAPTER DESCRIPTION PAGE
TITLE i
DECLARATION ii
DEDICATION iii
ACKNOWLEDGMENTS iv
ABSTRACT v
ABSTRAK vi
TABLE OF CONTENT vii
LISTS OF TABLES xii
LISTS OF FIGURES xiv
LIST OF ABBREVIATIONS xviii
1 INTRODUCTION
1.1 General Background 1
1.2 Problem Statement 4
1.3 Research Objective 5
1.4 Research Scope 6
1.5 Significant of Study 6
1.6 Research Methodology 7
1.7 Chapters Organisation 8
2 MODERN HEIGHT SYSTEM ELEMENTS AND GEODETIC
INFRASTRUCTURES IN PENINSULAR MALAYSIA
2.1 Introduction 9
2.2 Height System Elements
2.2.1 The Geoid
11
11

viii
2.2.2 Mean Sea Level
2.2.3 Ellipsoid
12
13
2.3 Geodetic Infrastructures in Peninsular Malaysia
2.3.1 Tidal Stations Network
2.3.2 Vertical Datum and Levelling Network
2.3.3 GPS Network and Services
2.3.3.1 Introduction
2.3.3.2 Peninsular Malaysia Primary
Geodetic Network
2.3.3.3 Malaysia Active GPS System
(MASS) and MyRTKnet
2.3.4 MyGEOID
15
17
18
19
18
20
24
3 THEORETICAL ASPECTS OF GPS LEVELLING, GEOID
FITTING AND VIRTUAL REFERENCE STATION
3.1 Introduction 26
3.2 GPS Levelling Concept 27
3.3 Geoid Fitting 30
3.4 Virtual Reference Station (VRS)
3.4.1 Introduction
3.4.2 Errors in Global Positioning System (GPS)
3.4.2.1 Atmosphere
a) Ionosphere
b) Troposphere
3.4.2.2 Satellite Orbits
3.4.2.3 Clock Errors
3.4.2.4 Multipath
3.4.2.5 Noise
3.4.3 Virtual Reference Stations Concept
3.4.3.1 Real-Time Ambiguity Resolution
3.4.3.2 Correction Generation Scheme
3.4.3.3 VRS Data Generation
3.4.4 Interpolation Technique
33
33
34
34
34
35
36
36
36
37
37
38
39
40
41

ix
3.4.4.1 Linear Combination Model
3.4.4.2 Distance Based Linear Interpolation
Method (DIM)
3.4.4.3 Linear Interpolation Method (LIM)
3.4.4.4 Least Square Collocation (LSC)
3.4.4.5 Comparison
41
42
43
44
46
4 METHODOLOGY FOR COMPUTATION AND ANALYSES OF
WMGeoid04 MODEL AND WMGeoid06A REVISED MODEL
4.1 Introduction 47
4.2 MyGeoid for Peninsular Malaysia
4.2.1 Gravity Data Acquisition
4.2.2 Gravimetric Geoid Computation
48
48
51
4.3 WMGeoid04 Fitted Geoid Model
4.3.1 GPS Data Acquisition
4.3.2 GPS Data Processing and Adjustment
4.3.3 WMGeoid04 Fitted Geoid Computation
4.3.4 Analyses of WMGeoid04 Fitted Model
4.3.4.1 External Data Sets
a) Data Set DS-1
b) Data Set DS-2
c) Data Set DS-3
4.3.4.2 Analysis
53
53
54
56
59
60
60
61
62
63

x
4.4 WMGeoid06A Fitted Geoid Model
4.4.1 Introduction
4.4.2 GPS Data Acquisition
4.4.3 GPS Data Processing and Adjustment
4.4.3.1 Comparison
4.4.4 Mean Sea Level Information
4.4.5 WMGeoid06A Fitted Geoid Computation
4.4.6 Analysis of WMGeoid06A Fitted Model
4.4.6.1 Comparison With External Data
Sets
68
68
68
69
72
73
73
76
76
4.5 Summary 79
5 QUALITY ASSESSMENT OF THE VIRTUAL REFERENCE
STATION AND EVALUATION OF HEIGHT DETERMINATION
WITH GEOID MODELS
5.1 Introduction 82
5.2 The Test Area
5.2.1 MASS and MyRTKnet Networks
5.2.2 GPS Stations
83
83
85
5.3 Assessment Method
5.3.1 Comparison with MASS Data
5.3.2 Comparison with GPS Stations
85
86
86
5.4 Data Processing and Comparison Analysis of
MASS Data
5.4.1 GPS Data Processing and Analyses
5.4.1.1 Temporal Variation of Fixed
Solution
5.4.2 Accuracy Assessment of Post-Process
Network Based RTK
5.4.2.1 Horizontal Coordinate Difference
5.4.2.2 Vertical Coordinates Difference
87
87
87
89
92
93
101
5.5 Assessment of Network Based Real-Time Survey
5.5.1 Field Observation
105
105

xi
5.5.2 Result and Analysis 105
5.6 Test and Evaluation
5.6.1 Method and Test Area
5.6.2 Comparison Analysis
110
110
111
5.7 Summary 116
6 CONCLUSION AND RECOMMENDATION
6.1 Conclusion 118
6.2 Recommendation 120
REFERENCES 122

xii
LIST OF TABLES
Table No. Title Page
4.1 Gravimetric Geoid Technical Details 52
4.2 Station Breakdown for Data Set 1 53
4.2 Network Adjustment Statistics 55
4.4 Comparison Statistics 57
4.5 LSC Fitting Parameters 58
4.6 LSC Fitting Statistics 59
4.7 Station Breakdown for Data Set DS-1 60
4.8 Absolute Errors (Data Set DS-1) 60
4.9 Relative Errors (Data Set DS-1) 60
4.10 Absolute Errors (Data Set DS-2) 61
4.11 Relative Errors (Data Set DS-2) 62
4.12 Absolute Error (Data Set DS-3) 62
4.13 Relative Errors (Data Set DS-3) 63
4.14 Network Adjustment Statistics 71
4.15 Ellipsoidal Height Difference 72
4.16 LSC Fitting Parameters 74
4.17 Comparison Statistics for Iteration #1 74
4.18 Fitting Statistics 76
4.19 Height Difference Statistic 78
4.20 Height Difference Statistic (filtered) 78
5.1 Equipment List for MASS station 84
5.2 Input Configuration 87
5.3 Statistical Summary for Horizontal Component 100
5.4 Statistical Summary for Vertical Component 104
5.5 Statistics of VRS Observation 106
5.6 Statistical Summary 109

xiii
5.7 Orthometric Height Difference (Kuala Lumpur) 112
5.8 Orthometric Height Difference (Johor) 112
5.9 Orthometric Height Difference (Putra Jaya) 113
5.10 Levelling Specification 115

xiv
LIST OF FIGURES Figure No. Title Page
1.1 Research Methodology 7
2.1 Establishment of Height of Reference Benchmark 13
2.2 Tidal Stations Distribution in Malaysia 15
2.3 An Example of Tidal Stations in Peninsular Malaysia 16
2.4 Precise Levelling Network (Peninsular) 18
2.5 GPS Network 19
2.6 Existing MASS & MyRTKnet Stations 21
2.7 Proposed MyRTKnet Phase II Stations 22
2.8 Final gravimetric geoid for Peninsular Malaysia 25
3.1 Relationship between Three Reference Surfaces 27
3.2 Relative Relationship between Three Reference
Surfaces
28
4.1 Flight lines in Peninsular Malaysia 50
4.2 Surface gravity coverage in Peninsular Malaysia 50
4.3 Final gravimetric geoid for Peninsular Malaysia
(WMG03A). Contour interval is 1 meter
53
4.4 Station's Distribution for Peninsular Malaysia 54
4.5 Network Error Ellipses (Absolute (Left) & Relative
(Right))
56
4.6 ∆N Variation 57
4.7 Corrector Surface plotted from Iteration-2 results 59
4.8 Station's Horizontal & Vertical Errors (Data Set DS-1) 61
4.9 Station's Distribution for Data Set DS-2 62
4.10 Height Diff. (δH) Data Set DS-1 – Iteration 1 64

xv
4.12 Height Diff. (δH) Data Set DS-2 – Iteration 1 65
4.13 Height Diff. (δH) Data Set DS-2 – Iteration 2 65
4.14 Height Diff. (δH) Data Set DS-3 – Iteration 1 66
4.15 Height Diff. (δH) Data Set DS-3 – Iteration 2 66
4.16 Station's Distribution for 2006 Data 69
4.17 Error Ellipses of 3-Days Adjustment 70
4.18 Network Error Ellipses (Absolute (Left) & Relative
(Right))
71
4.19 ∆N Variation 74
4.20 Corrector Surface plotted from Iteration-21 results 75
4.21 Height Difference (Unfiltered) 77
4.22 Height Difference Histogram (Unfiltered) 77
4.23 Height Difference (Filtered) 79
5.1 Location of UTMJ and J. Bahru Dense Network 84
5.2 Location of KTPK and Klang Valley Dense Network 84
5.3 Location of GPS Stations for Test Purposes 85
5.4 Number of Satellites and PDOP for KTPK (Top) and
UTMJ (Bottom) on 27th August 2006
88
5.5 RMS (Blue) and Number of Satellites (Red) over 3 days
for KTPK from 27th – 29th August 2006
89
5.6 RMS (Blue) and Number of Satellites (Red) over 3 days
for UTMJ from 27th – 29th August 2006
90
5.7 RMS (Blue) and PDOP (Red) over 3 days for KTPK
from 27th – 29th August 2006
91
5.8 RMS (Blue) and PDOP (Red) over 3 days for UTMJ
from 27th – 29th August 2006
92
5.9 Latitude Difference over 3 days for KTPK from 27th –
29th August 2006
93
5.10 Longitude Difference over 3 days for KTPK from 27th – 29th August 2006
94
5.11 Latitude Difference over 3 days for UTMJ from 27th –
29th August 2006
94

xvi
5.12 Longitude Difference over 3 days for KTPK from 27th –
29th August 2006
95
5.13 Ionosphere Index on 27th August 2006 96
5.14 Three Days Latitude Variation (Blue) and Ionosphere
I95 (Red) for KTPK
97
5.15 Three Days Longitude Variation (Blue) and Ionosphere
I95 (Red) for KTPK
98
5.16 Three Days Latitude Variation (Blue) and Ionosphere
I95 (Red) for UTMJ
98
5.17 Three Days Longitude Variation (Blue) and Ionosphere
I95 (Red) for UTMJ
99
5.18 Error in Northing (KTPK) 99
5.19 Error in Easting (KTPK) 99
5.20 Error in Northing (UTMJ) 100
5.22 Error in Easting (UTMJ) 100
5.23 Three Days Height Variation (Blue) and PDOP (Red)
for KTPK
101
5.24 Three Days Height Variation (Blue) and I95 Index
(Red) for KTPK
102
5.25 Three Days Height Variation (Blue) and PDOP (Red)
for UTMJ
103
5.26 Three Days Height Variation (Blue) and I95 Index
(Red) for UTMJ
103
5.27 Vertical Error (KTPK) 104
5.28 Vertical Error (UTMJ) 104
5.29 3-Dimensional Coordinates Difference for E0014 106
5.30 3-Dimensional Coordinates Difference for E0015 107
5.31 3-Dimensional Coordinates Difference for E0146 107
5.32 3-Dimensional Coordinates Difference for E1220 108
5.33 Coordinate Error in Northing Component 109
5.34 Coordinate Error in Vertical Component 109
5.35 Coordinate Error in Vertical Component 110
5.36 MyRTKnetStat Program Example 111

xvii
5.37 GPS Levelling Using WMGeoid04 114
5.38 Relative GPS Levelling Using WMGeoid06A 114
5.39 Relative Precision Comparison 115

xviii
LIST OF ABBREVIATIONS DEM - Digital Elevation Model
DSMM - Department of Survey and Mapping Malaysia
EMPGN2000 - East Malaysia Primary Geodetic Network 2000
GLONASS - Russian’s Global Navigation Satellite System
GNSS - Global Navigation Satellite System
GPS - Global Positioning System
GRS80 - Geodetic Reference System 1980
IGS - International GNSS Services
ITRF2000 - International Terrestrial Reference Frame 2000
JICA - Japan International Cooperation Agency
JUPEM - Jabatan Ukur dan Pemetaan Malaysia
LSD1912 - Land Survey Datum 1912
MASS - Malaysia Active GPS System
MSL - Mean Sea Level
MyRTKnet - Malaysia RTK Network
NCGS - North Carolina Geodetic Survey
NGS - National Geodetic Survey
NGVD - National Geodetic Vertical Datum
NHM - National Height Modernization
NHMS - National Height Modernization Study
NPLN - National Precise Levelling Network
NSRF - National Spatial Reference Frame
PMPGN2000 - Peninsular Malaysia Primary Geodetic Network 2000
PMSGN94 - Peninsular Malaysia Scientific Geodetic Network 1994
RMK - Rancangan Malaysia
RTK - Real Time Kinematic
SST - Sea Surface Topography

xix
TEC - Total Electron Contents
TON - Tidal Observation Network
VRS - Virtual Reference Station
WGS84 - World Geodetic System 1984

1
CHAPTER 1
INTRODUCTION
1.1 General Background In the recent years, an accurate height of points is always being determined
by a levelling technique that is usually referred as the adopted Mean Sea Level
(MSL). Jabatan Ukur dan Pemetaan Malaysia (JUPEM), also known as the
Department of Survey and Mapping Malaysia (DSMM) has been carrying out
levelling survey to establish a precise levelling network for the whole country since
the early 1960’s. While the adjustment of the precise levelling network in Peninsular
Malaysia has been completed in 1998, the re-adjustment process is still ongoing,
with the levelling networks in Sabah and Sarawak are still not unified and always
being referred to various vertical datum.
With the increasing capability of Global Positioning System (GPS) satellites
and its computation techniques, the use of GPS for height determination has rapidly
increased. This brings forward the question whether the slow and expensive levelling
can be replaced by GPS, or at least, levelling errors can be controlled. There are two
(2) different things to consider, which the accuracy of the GPS itself and also the
accuracy of the geoid model that needed to transform heights above the ellipsoid into
orthometric.
For several years, a precise geoid determination in Malaysia has been done
with collaboration with other institutions locally and abroad. However, the previous
geoid determination study was based on projects basis and concentrate on a small
area that has dense gravity data with main goal is to compute a geoid model for

2
whole of Malaysia. In 2003, JUPEM had carried out airborne gravity survey that
covers whole of Peninsular Malaysia as well as in Sabah and Sarawak with the main
objective is to compute precise gravimetric geoid models across the country.
In 2005, JUPEM has launched MyGEOID and MyRTKnet to provide public
users with a complete infrastructure that can be utilized. The achievable accuracy
with MyGEOID is around 5 cm (1σ) and 10 cm (1σ) for Peninsular Malaysia and
Sabah and Sarawak respectively. These figures are still far from the anticipated
accuracy of 1 cm (1σ) that has been achieved in certain area in Europe. The
accuracy of MyGEOID can be increased with the densification of gravity data and
more benchmarks observed with GPS.
Geoid determination has been one of the main research areas in Science of
Geodesy for decades. With the wide spread use of GPS in geodetic applications,
research institutes and relevant agencies responsible for geodetic positioning have
invested million of dollars to precisely determine the local/regional geoid. All with
an aim to replace the geometric levelling, which is a tedious measurement work
compared to the GPS surveying techniques.
The National Height Modernization (NHM) program in the United States of
America has been established to update the vertical component of the existing spatial
geodetic reference framework. This program is meant for those areas with many
geodetic monuments, destroyed either by development or compromised by seismic
and subsidence activity. The North Carolina Geodetic Survey (NCGS) has
conducted a National Height Modernization Study (NHMS) to compare the
accuracies and staff-hour costs of elevations, determined by traditional levelling
versus by using Global Positioning System (GPS). Similar cost comparison studies
are being conducted as part of the National Height Modernization program in
northern and southern California, especially in areas experiencing any crustal motion
or subsidence.
The staff hour comparison between levelling and GPS has shown that the
GPS survey took 27% less time than the comparable levelling survey, which re-

3
instate the fact that the staff-hour cost to conduct an elevation project by GPS was
73% less than by conventional levelling.
A group of researchers from National Geodetic Survey (NGS) United State of
America have been actively performing studies to improve the GPS Levelling
technique. With the completion of the general adjustment of the North American
Vertical Datum of 1988 (NAVD 88), computation of an accurate national high-
resolution geoid model (currently GEOID03 with new models under development)
(Roman et al. 2004), and publication of NGS’ Guidelines for Establishing GPS-
Derived Orthometric Heights (Standards: 2 cm and 5 cm) (Zilkoski et al. 2005),
GPS-derived orthometric heights can provide a viable alternative to classical
geodetic levelling techniques for many applications. Orthometric heights (H) are
referenced to an equipotential reference surface, e.g., the geoid. The orthometric
height of a point on the Earth's surface is the distance from the geoidal reference
surface to the point, measured along the plumb line, normal to the geoid. Ellipsoid
heights (h) are referenced to a reference ellipsoid. At the same point on the surface
of the earth, the difference between an ellipsoid height and an orthometric height is
defined as the geoid height (N).
Several error sources which affect the accuracy of orthometric, ellipsoid, and
geoid height values are generally common to neighbouring points. Because these
error sources are common, the uncertainty of height differences between nearby
points is significantly smaller than the uncertainty of the absolute heights of each
point. Adhering to NGS’ earlier guidelines, ellipsoid height differences (dh) over
short base lines, i.e., not more than 10 km, can now be determined to better than +/- 2
cm (with 2-sigma uncertainty) from GPS phase measurements. Adding in small
error for uncertainty of geoid height difference and controlling remaining systematic
differences between the three height systems, will typically produce a GPS-derived
orthometric height with 2-sigma uncertainties, with +/- 2 cm local accuracy. Geoid
height differences can be determined (in selected areas nationwide) with
uncertainties that are typically better than 1 cm for distances up to 20 km, and less
than 2-3 cm for distances between 20 and 50 km. When using high-accuracy field
procedures for precise geodetic levelling, orthometric height differences can be
computed with an uncertainty of less than 1 cm over a 50-kilometer distance.

4
Depending on the accuracy requirements, GPS surveys and current high-resolution
geoid models can be used, instead of the classical levelling methods.
Rene Forsberg from Geodynamics Department, Danish National Space
Centre is one of the well known figures in geoid determination study. He is also the
lead scientist for the Airborne Gravity Survey and Geoid Determination Project for
Malaysia in 2003. Summarising the Project (Forsberg, 2005), the geoid fitting is,
however, not at the expected accuracy level, which is probably due to occasional
errors in levelling and/or GPS data (especially antenna offsets to levelling points are
often a source of error). Crustal movements can also play a role if subsidence has
occurred between the epochs of levelling and GPS observation. To further improve
the Malaysian geoid models he recommends these following actions:
- Carefully analyze levelling networks, and possibly perform a new adjustment
including analysis of subsidence and land uplift (where possible by repeated
surveys).
- Reanalyze GPS connections and antenna heights at levelling benchmarks.
- Resurvey by levelling and GPS of selected, suspected erroneous points with
large geoid outliers.
- Make a new GPS-fitted version of the gravimetric geoid as new batches of
GPS-levelling data become available, and as RTK-GPS users report problem
regions for heights.
1.2 Problem Statement
The geodetic reference frame for Peninsular Malaysia has been realised
through the setting-up of the Malaysia Active GPS System (MASS) in 1999. For the
vertical reference system, the National Precise Levelling Network (NPLN) was
completed in 1998. Peninsular Malaysia used National Geodetic Vertical Datum
(NGVD) that was established in 1995 for its height reference.

5
With steady economic growth in Malaysia since 1998, more expressways,
highways, federal and states road have been built or have been widen. The processes
have somehow destroyed, damaged or disturbed the benchmark located along the
route. Since 2000, DSMM have started to re-survey selected precise levelling route
with new planted benchmarks to support survey and mapping industries. Currently
the conventional re-surveying processes are quite impractical since the cost is
expensive and time consuming.
The purpose of this study is to look into the strategy for rapid height
determination using the current GPS technology for height establishment purposes as
well as for height monitoring system. The research will involve in analysis of the
existing WMGeoid04 fitted geoid models, refining the WMGeoid04 with more data
and studying the capability of MyRTKnet services of Virtual Reference Station
(VRS) in height determination. The process will include data validation, fitting by
collocation process and statistical evaluation of the results.
1.3 Research Objectives
The main objectives of this study are:
i. To investigate, analyse and to refine the existing WMGeoid04 fitted geoid
model.
ii. To study the capability of MyRTKnet’s Virtual Reference Station (VRS)
for height determination.
.

6
1.4 Research Scopes
In order to achieve the research objectives, the scope of works will involve
the following procedures:
i. Analyses of WMGeoid04 fitted geoid model.
ii. To study and analyse the capability of MyRTKnet’s VRS for height
determination.
iii. Designing of GPS on Benchmark network to refine the WMGeoid04
fitted geoid model on selected area.
iv. Observations and data processing for GPS project in Putrajaya, Kuala
Lumpur, Kluang and Johor Bahru.
v. Geoid fitting by Least Squares Collocation process.
vi. Evaluation, analyses and summarisation.
1.5 Significant of Study
The significances of this study includes:-
i. To study the capability of rapid height determination using the latest
technology of GPS and geoid models that can be used by the
surveying communities and other public users.
ii. To study, compute and assessment of precise fitted geoid models for
Peninsular Malaysia.
iii. Understanding and assessment of Virtual Reference System
infrastructure in Malaysia and its technology.

7
1.6 Research Methodology
Research methodologies will be divided into several stages in order to
achieve the objectives of this study. In general, the methodologies are depicted in
Figure 1.1.
Figure 1.1: Research Methodology
ANALYSING THE CAPABILITY OF
MyYRTKnet’s VRS
LITERATURE REVIEW
ANALYSIS OF WGeoid04 FITTED GEOID MODEL
GPS OBSERVATION ON BENCHMARK AND DATA PROCESSING
• Session length • Data processing • Network Adjustment
GEOID FITTING • Data validation • Filtering • Evaluation
ANALYSIS AND RESULTS
CONCLUSIONS AND
RECOMMENDATIONS

8
1.7 Chapter’s Organisation
This thesis is consists of six (6) chapters. Chapter 1 will mainly discuss on
the research background, objectives, scopes, contributions and methodologies.
Chapter 2 describes the elements of modern height system and overview of the
current geodetic infrastructures in Peninsular Malaysia. Chapter 3 comprises of
theoretical aspects of GPS Levelling, Virtual Reference System concept and geoid
fitting. Chapter 4 will highlight on analyses of WMGeoid04 fitted geoid models,
GPS data processing and adjustment of new GPS on Benchmark Project and analyses
of WMGeoid06A revise model. Quality assessments of Virtual Reference Station
(VRS) and statistical evaluation of geoid models using VRS are covered in Chapter 5
while conclusions and recommendations are in Chapter 6.

9
CHAPTER 2
MODERN HEIGHT SYSTEM ELEMENTS AND GEODETIC
INFRASTRUCTURES IN PENINSULAR MALAYSIA
2.1 Introduction
A modern system in a modern surveying and mapping communities requires
the ability to measure elevations relative to mean sea level (MSL) in the easiest,
most accurate and at the lowest possible cost. The application ranges from cadastral
surveys up to the sea level rise monitoring; from navigation and mapping to the use
of remote sensing for resource management; from mineral exploration until the
assessment of potential flooding areas; from the construction and precise positioning
of dams and pipelines to the interpretation of seismic disturbances. The height
reference system also has been implicated in many legal documents regarding land
management and safety such as easement process, flood control, and boundary
demarcation. All of these applications depend on the universal compatibility of a
common coordinate reference system where geo-referenced information can reliably
be interrelated and exploited.
The spirit levelling technique is a well-known approach that has been
conducted for more than 200 years. Although it is an inherently accurate method to
determining height differences, spirit levelling is costly and difficult to undertake,
especially in remote areas. It involves making differential height measurements
between two vertical graduated rods, approximately 100 metres apart, using a tripod
mounted telescope whose horizontal line of sight is controlled to better than one
second of arc by a spirit level vial or a suspended prism. This process is repeated in a

10
leapfrog fashion to produce elevation differences between established benchmarks
that comprise the height reference system.
The alternative approach to spirit levelling for the creation of a vertical datum
is geoid modeling. If the two approaches were errorless, it would produce the same
results. Geoid modeling has been defined in relation to an ellipsoid (e.g. GRS80),
that approximates the overall shape of the earth including the geoid, which corrects
for local variations in the Earth’s gravity field.
Space-based Global Navigation Satellite Systems (GNSS), such as the United
States’ Global Position System (GPS), Russia’s GLONASS, and the proposed
European Galileo system, all are based on networks of satellites that send out radio
signals to portable receivers. They provide accurate positions at any time, in any
weather and at any place globally. These systems continue to improve in accuracy
and provide ease of use, gaining acceptance as the choice for geo-referencing tools
among the geomatics and scientific communities. They are all capable of providing
topographic height information when their inherent 3D information is combined with
the geoid information.
Systems such as GPS provide both an inexpensive means for users to obtain
consistent heights connected to the 3D reference system, and also the means for
geomatics agencies to maintain the 3D reference system at lower cost. Unfortunately,
the existing height reference system is not compatible with GPS and requires
modernization to fully support and realize the substantial benefits of GPS and related
modern technologies for accurate height measurement.
Height modernization is an effort to enhance the vertical component of the
existing Peninsular Malaysia Primary Geodetic Network 2000 (PMPGN2000) and
East Malaysia Primary Geodetic Network 2000 (EMPGN2000), which will form the
National Spatial Reference Frame (NSRF). NSRF is a consistent national reference
framework that specifies latitude, longitude, mean sea level and ellipsoidal height
throughout Malaysia. Height modernization includes a series of activities designed
to advance and promote the determination of high accuracy elevations through the

11
use of Global Positioning System (GPS) surveying, rather than by classical line-of-
sight levelling.
The height modernisation concept was introduced by National Geodetic
Survey (NGS), United States of America in the late 1990s, with aims to provide
accurate knowledge of size, shape, and position of an environment, as seen almost
daily in the construction and safety of roads and buildings, the transportation of
goods and people by car, ship or plane, as well as in the monitoring and protection of
our environment.
In the following sub-sections, the main elements of a modern height system
will be discussed in details and the relationship between them will be considered in
turn.
2.2 Height System Elements
Modern reference frames, such as ITRF2000 (Altamimi, 2002) use space-
based techniques to provide a fully three-dimensional reference frame. In practice,
separate horizontal and vertical datum is being used. The horizontal datum will
utilized a three-dimensional frame, but only the horizontal components (latitude and
longitude on a chosen ellipsoid) are used. The vertical reference frame is traditionally
being tied to the geoid, which is closely approximated by MSL. At a conceptual
level, all national vertical datum are using the same reference frame - the geoid.
2.2.1 The Geoid
A surface on which the gravity potential value is constant is called an
equipotential surface. As the value of the potential surface varies continuously, it
can be recognised infinitely by the following prescription:
W(n) = const. (2.1)

12
These equipotential surfaces are convex everywhere above the earth and
never cross each other anywhere. By definition, the equipotential surfaces are
horizontal everywhere and are thus called sometime the level surfaces. One of these
infinitely many equipotential surfaces is the geoid, one of the most important
surfaces used in geodesy. The geoid is commonly defined as the equipotential
surface of the Earth’s gravity field. The equipotential surface is being defined by a
specific value of gravity potential of W0 which closely coincides with undisturbed
mean sea level while ignoring oceanographic effects or in some sense, approximating
the MSL at its best.
2.2.2 Mean Sea Level
Vertical datum as known by many as the base for height reference and always
being realized as the zero reference for the height. In the case of geodetic levelling,
the datum is a level surface where the bench marks heights are being referred. Until
a few years ago, it was understood and believed that the mean sea level (MSL)
should theoretically coincide with the geoid, or the difference of the two surfaces
was negligible. With this belief, geodesist and other geo-scientist held numerous
efforts on determining a vertical reference for the vertical datum where it directly
refers to the task of determining the position of the mean sea level.
To determine MSL value, the local instantaneous sea level (HISL) is being
recorded continuously. Based on the average tidal observation for a certain period, a
local MSL can be obtained. The period over which MSL would be recorded may
also vary from country to country. A reference tide gauge bench mark is then
established and height above mean sea level (HMSL) should be calculated as depicted
in schematic diagram in Figure 2.1. The reference bench mark act as the national
vertical datum and all bench marks heights in the interconnecting levelling network
determine by the accumulating height difference from this bench mark.

13
Figure 2.1: Establishment of Height of Reference Bench Mark
Due to external data such as sea surface topography (SST), many nations will
chose either the MSL record at a single tide gauge site, or the MSL record at several
sites to define their vertical datum. The former has been the practice in Peninsular
Malaysia whereby establishing the vertical datum is done by adopting tide gauge
station in Port Klang as the reference MSL. If the latter is being considered, the
datum can be potentially distorted if MSL at the different sites was not on the same
equipotential surface. The end result is that national vertical datum tends to differ
from each other, due to the differences in SST at the tide gauge sites. However, with
enough information on SST the national vertical datum can be realised using all
available tide gauges in the country.
2.2.3 Ellipsoid
Normally, in geodetic applications, three different surfaces or earth figures
are involved. In addition to the earth's natural or physical surface, these include a
geometric or mathematical reference surface, the ellipsoid, and an equipotential

14
surface called the geoid. Although the geoid is smooth and continuous, it is rather
complex surface to be mathematically defined. Instead, an ellipsoid is usually being
used as the datum for horizontal control networks in place of the geoid surfaces.
The presently global best fits and widely used ellipsoids are the Geodetic
Reference System 1980 (GRS80) and World Geodetic System 1984 (WGS84).
Modern satellite technology has greatly improved the determination of the Earth’s
ellipsoid and WGS 84 was designed for use as the reference system for GPS.
Although an ellipsoid has many geometric and physical parameters, it can be fully
defined by any four independent parameters. All the other parameters can be derived
from the four defining parameters. The WGS84 Coordinate System is a conventional
terrestrial reference system. When selecting WGS84 ellipsoid and associated
parameters, the original WGS84 Development Committee decided to adhere closely
to the IUGG’s approach in establishing and adopting GRS80. GRS80 has four
defining parameters:
(1) Semi-Major axis (a = 6378137 m)
(2) Earth’s Gravitational Constant (GM = 3986005 x 108 m3/s2)
(3) Earth’s Dynamic (J2 = 108263 x 108)
(4) Angular Velocity of the Earth (ω = 7292115 x 10-11 rad/s)
Besides the same values of a and ω as GRS80, the current WGS84 (National
Imagery and Mapping Agency, 2000) uses both an improved determination of the
geocentric gravitational constant (GM = 3986004.418 x 108 m3/s2) and, as one of the
four defining parameters, the reciprocal (1= f /298.257223563) of flattening instead
of J2. This flattening is derived from the normalized second-degree zonal
gravitational coefficient (C2,0) through an accepted, rigorous expression, and turned
out slightly different from the GRS80 flattening because the C2,0 value is truncated in
the normalization process. The small differences between the GRS80 ellipsoid and
the current WGS84 ellipsoid have virtually no practical consequence.

15
2.3 Geodetic Infrastructures in Peninsular Malaysia
2.3.1 Tidal Stations Network
The technological advances in the field of surveying and the demand for an
accurate height control among users have prompted the DSMM to improve the
existing height control. In its effort to redefine a new National Geodetic Vertical
Datum (NGVD), DSMM has implemented the Tidal Observation Project in early
1980’s.
The establishment of the Tidal Observation Network (TON) in Malaysia has
been commenced in 1983. This project was initialised and carried out by DSMM
with the cooperation of the Japan International Cooperation Agency (JICA). By end
of 1995, there are twenty-one (21) tide stations were established and in operation,
where nine (9) stations are located in Sabah and Sarawak and the rest in Peninsular
Malaysia. However, the tide station located in Miri, Sarawak has been damaged
since December 1998 due to unforeseen mishaps but then has been subsequently re-
established in 2006.
Figure 2.2: Tidal Stations Distribution in Malaysia
94 96 98 100 102 104 106 108 110 112 114 116 118 120
-6
-4
-2
0
2
4
6
8
10
9Mw
Langkawi
Penang
Lumut
Tg. Keling
Klang
KukupJ. Bahru
Tg. Sedili
Tioman
Kuantan
Chendering
Geting
Sejingkat
Bintulu
Miri
Labuan
Kota Kinabalu
Kudat
Lahat Datu
Sandakan
Tawau

16
The tide stations are distributed evenly along the coast and the locations are
being selected to monitor typical characteristics of tides of the adjacent sea. These
stations are constructed on a rigid shore or on a stable structure, extended into the
sea. An example of a Tide gauge station is shown in Figure 2.3.
The Geodesy Section, DSMM is responsible for the monitoring of these tide
gauge stations. It involves a regular maintenance of the gauges, as well as the
collecting, processing, analysing and distributing the observed tidal data. The
observed tidal data and other related values are being published annually by DSMM
in two reports, titled The Tidal Observation Record and The Tidal Prediction Table.
To obtain reliable data, tides are being observed systematically at all stations
continuously, over a common period for many years. The tide gauges are well-
maintained through regular visits for preventive maintenance to ensure an
uninterrupted observation. In addition, the measurement of zero point is being done
during the monthly visits to ensure that the tidal height recorded on the tide gauge is
measured from a fixed reference point. The height differences between the tide gauge
base points, the standard tidal benchmark (including other benchmarks) are being
observed twice a year by precise levelling. The levelling is useful in order to monitor
any possible vertical movement of the tidal observation platform.
Figure 2.3: An Example of Tidal Station in Peninsular Malaysia

17
2.3.2 Vertical Datum and Levelling Network
Benchmark values are one of the products of the Department of Survey and
Mapping Malaysia (DSMM) to support various activities in the field of geodetic,
mapping, engineering surveys and other related scientific studies.
In Peninsular Malaysia, a levelling network was started in 1912, using the
Land Survey Datum 1912 (LSD1912). Since then, it has been used as a basis for the
secondary levelling. However, the measurement carried out was not in a uniform
manner and the network adjustment was not homogeneous.
The technological advances in the field of surveying, and the demand for an
accurate height control among users has prompted the DSMM to improve the existing
height control. In its effort to redefine a new National Geodetic Vertical Datum
(NGVD) for Peninsular Malaysia, DSMM has implemented three projects in early
1980’s. These projects were the Tidal Observation Project, the Precise Levelling
Project and Gravity Survey Project and had the following objectives.
• Tidal Observation Project : to determine the MSL and tide studies. • Precise Levelling Project : connecting the tide gauges with precise
Levelling (Figure 2.4). • Gravity Survey Project : providing orthometric corrections for
heights.
The vertical control in Peninsular Malaysia, Sabah and Sarawak was constructed
separately. The new height datum for Peninsular Malaysia was determined in 1994
were based on the mean sea level (MSL) value, obtained from the tide gauge in Port
Klang after more than 10 years of observation (i.e 1984 to 1993). The height was
transferred from Port Klang using precise levelling to a Height Monument in Kuala
Lumpur by 3 different precise levelling routes.

18
Figure 2.4: Precise Levelling Network (Peninsular) 2.3.3 GPS Network and Services
2.3.3.1 Introduction
DSMM is the responsible agency for the establishment and maintenance of
horizontal and vertical control points for geodetic applications. With the advent of
Global Positioning System or GPS has prompted DSMM to establish and to provide
users with GPS services along side with the latest development in surveying and
mapping technology.
GPS was introduced to DSMM in late 1989. To date, it has been used in the
establishment of GPS networks in Peninsular Malaysia, Sabah and Sarawak. The so-
called passive networks in Peninsular Malaysia, such as the Peninsular Malaysia
Scientific Geodetic Network 1994 (PMSGN94), has served its purpose relatively
THAILAND
Benta
Temerloh
Jerantut
Awah
Gambang
Tranum
Bentong
Bahau
Jemaluang
Tinggi Batu
Pontian
Segamat
Chondong
Keling
Melaka
Sedili
PedasLinggi
Pelabuhan Kelang Kelang
Kubu
Behrang
Sg.
Lumut Sitiawan
Ipoh
Sumpitan
SeraiMusang
Terengganu
Kota Bharu
Geting
Baling
SikGurun
Butterworth
Setar
Naka
Bukit Kayu Hitam
Langkawi
Pinang
Tioman
Junction Point
Stesen Tolok Air Pasang Surut
99.50 100.00 100.50 101.00 101.50 102.00 102.50 103.00 103.50 104.00
1.50
2.00
2.50
3.00
3.50
4.00
4.50
5.00
5.50
6.00
6.50
SINGAPURA A
Kg.
Kuantan
Tg.Gelang
Muadzam
KeratongSerting
Kluang
AyerHitam
Kota Johor Baru
Kukup
Pahat
nKechil
Skudai
Leban
Tg.
Ayer Keroh
Seremban
KualaLumpur
KualaBesar
Ayer Tawar
Kg.
Gerik
BaganGua
Kuala
Alor
PadangBesar
Kangarr
Pulau
Pulau
Pulau
Jaringan Ukuran Aras Jitu
Chendering

19
well, especially in mapping and engineering applications. In 1998 and 2004, DSMM
has established two active GPS networks known as the Malaysia Active GPS System
(MASS) and Malaysian Real Time Kinematic Network (MyRTKnet) to serve the
nation with an advanced mapping technology.
2.3.3.2 Peninsular Malaysia Primary Geodetic Network
A GPS network consists of 238 stations (as in Figure 2.5) has been observed
in Peninsular Malaysia using four Ashtech LX II dual frequency receivers. The
acquired data was processed and adjusted in 1993. The main objectives were to
establish a new GPS network, analyse the existing geodetic network and obtain
transformation parameters between WGS84 of GPS and Malayan Revised
Triangulation (MRT). In the network adjustment, a minimally constrained
adjustment was made with Kertau, Pahang (Origin) held fixed. The coordinates of
Kertau are in approximate WGS84 and derived from Doppler coordinates of NSWC
9Z-2 reference frame. The Ashtech processing software with broadcast ephemeris
has been used for the determination of the baseline solutions. The relative accuracy
of the network is 1-2 ppm for horizontal coordinates and 3-5 ppm for vertical.
DOP1
DOP2
DOP3
DOP4DOP5
GP02
G003 GP04
GP05GP06
GP07
GP08
GP09GP10
GP11 GP12 GP13
GP14
GP15GP16
GP17
GP18
GP19 GP20
GP21
GP22
GP23
GP24GP25
GP26 GP27GP28
GP29 GP30 GP31 GP32GP33
GP34GP35
GP36 GP37
GP38
GP39GP40
GP41 GP42GP43
GP44
GP45
GP47
GP48
GP49GP50
GP51
GP52
GP53
GP54
GP55
GP56GP57
GP58
GP59GP60
GP61
GP79
GP80
GP81
GP82
P083
GP84GP85
GP86
GP87GP88
GP89
GP90GP91
GP94
GP95
GP98
GP99
G100
J416
TD01
TG01
TG03
TG04
TG05
TG06
TG07
TG09
TG10
TG11
TG13TG14
TG15
TG18
TG19
TG20
TG24TG25
TG26
TG27TG28
TG31
TG33
TG35
TG36
TG38
TG42
TG56
TG57TG58
TG59
TG61
T190
T200
T283
13DJ
149B
251.00
P101
P102
P105
P106P107
P201
P202
P203
P204P205
P207
P209
P210P211
P212
P213
P214
P215
P216P217
P218
P219
P220
P221
P222
P223
P224
P225
P226P227
P228
P229
P230P231
P232
P233
P234P235
P236P237
P238
P239
P240P241
P242
P243
P244P245
P246
P247
P248
P249P250
P251P252
P253
P254
P255 P256
P257
P258
P259P260
P261
P263
P264P265
P267
P268
P269
P270
P271P272P273
P274
P275
P276
P277
P278
P279P280P281
P282P283 P285 P286
P287
P288
P289P290
P291P292
P293
P295
P296P297
P298
P299
P304
P305
P306P307P308 P309
P310
P311
P313
P314
P351
P352
P500
P808P809
S136
S290
K350
M331
100.0 101.0 102.0 103.0 104.0
2.0
3.0
4.0
5.00
6.00
THAILAND
SINGAPORE
LATITUDE
LONGITUDE
Figure 2.5: GPS Network

20
2.3.3.3 Malaysia Active GPS System (MASS) and MyRTKnet
Originally, the concept of having network of the unstaffed, permanently
configured GPS facilities which collect GPS data automatically has been evolving at
JUPEM since 1996 (DSMM, 2003). Malaysia Active GPS System (MASS) is the
first GPS active network established in 1998 by DSMM in providing 24 hours GPS
data for users in Malaysia. This network has been completed in 2002, with 18
stations serving the nation around the clock continuously. The primary objective of
MASS is to provide local users with GPS data, bearing latency of 24 hours. The
MASS data are being made available to the public by DSMM either via Internet or
by request. The data are being made available in daily observation batches (i.e. from
0000 to 24 hours) and in a compressed form.
The links to ITRF2000 for MASS network were made by acquiring GPS data
from Eleven (11) International GNSS Services (IGS) stations around Malaysia of the
same period for processing and reference frame determination. Data processing was
carried out using precise satellites orbits also acquired from IGS. The Bernese
scientific GPS processing software has been used in the processing of the acquired
data.
In line with the government's effort to push Malaysia to achieve as a
developed nation status by the year 2020, various initiatives have been drawn up to
bring the country closer to the objective. One of the initiatives is using a real-time
survey technology for the improvement of services and dissemination of various
geodetic products rendered by DSMM.
Real Time Kinematic (RTK) survey method is the latest innovation of
relative positioning, where two receivers are being linked by radios simultaneously
while collecting observations. Currently, RTK has been widely used for surveying
and other precise positioning applications. The new generation of RTK, known as
“Virtual Reference Station” consists of networks of GPS reference stations,
continuously connected via tele-communication network to the control center. A
computer at the control center continuously gathers the information from all

21
receivers and creates a living database of Regional Area Corrections. With VRS
system, one can establish a virtual reference station at any point and broadcast the
data to the roving receivers.
In order to take full advantage of the real-time VRS system, DSMM has
established a network of permanently running GPS base stations, at spacing from 30
to 1500 km, feeding GPS data to a processing centre via a computer network. A
central facility has been set up to model the spatial errors which limit the GPS
accuracy through a network solution and then, generate corrections for roving
receivers, so it can be positioned anywhere inside the network with an accuracy
better than a few centimeters to a few decimeters, in real time. At the same time, a
web site has been made available to download the GPS data for post-processing
solutions.
Currently, Malaysia has 27 RTK reference stations for the network, covering
the whole Peninsular Malaysia and two (2) major cities in Sabah and Sarawak. Each
reference station is being equipped with a Trimble 5700 GPS receiver, antenna,
power supply and modem to communicate with the control centre via Internet
Protocol Virtual Private Network (IPVPN) communication infrastructure.
Figure 2.6: Existing MASS & MyRTKnet Stations
99.50 100.00 100.50 101.00 101.50 102.00 102.50 103.00 103.50 104.00 104.50 105.00
Longitude
1.50
2.00
2.50
3.00
3.50
4.00
4.50
5.00
5.50
6.00
6.50
Latit
ude
ARAU
BEHR
KUAL
GETI
USMP
SEGA
UTMJ
KUAN
KTPK
IPOH
LGKW
SGPT
JUIP
KKBH
MERU
MARG
RTPJ
BABHSELM
GMUS
GRIK
JUML
KLAW
TLOH
KLUG
MERS
KUKP
PEKN
TGPG
UUMK
BANT
UPMS
BKPL
JHJY
PUPK
MASS Stations
MyRTKnet Stations
Major City
State's Capital
Major Town

22
Under the 9th Malaysian Plan or Rancangan Malaysia Ke Sembilan (RMK-9),
DSMM is planning to expand the network in order to cover Peninsular Malaysia and
all major town/settlement in Sabah and Sarawak. The MyRTKnet network
expansion will upgrade all the existing MASS stations with real time data-producing
capability.
Figure 2.7: Proposed MyRTKnet Phase II Stations
Generally, the MyRTKnet system provides the following levels of GPS correction
and data:
(a) High Accuracy VRS Correction
i) Within the limits of MyRTKnet dense, MyRTKnet provides Real
Time Kinematic Network GPS corrections with accuracies of 1-3
cm horizontally and 3-6 cm vertically.

23
ii) Distance-dependent errors are being considerably minimised with
the utilisation of the MyRTKnet network, achieving increased
accuracy and reliability. The above stated accuracy is still
achievable within a distance of 30 km away from the dense
network.
iii) Other areas outside the 30 km radius from the dense network will
have corrections with accuracy of 10 cm throughout.
(b) Single Base Real-Time Correction
This correction is provided for area within 30 km from the MyRTKnet
single reference station with an accuracy of 2 to 4 cm horizontally and
4 to 8 cm vertically.
(c) Virtual RINEX Data
i) Within the larger limits of the MyRTKnet system, stated in para
(a), it provides data for post-processing of static survey sessions,
enhancing the positions by an order of 1 cm limit. The data is
being provided in the standardised RINEX format and made
available via password protected internet website.
ii) Data can be downloaded at any interval, ranging from 0.1-60
seconds, as specified on the website.

24
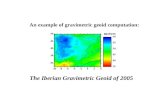
2.3.4 MyGEOID
The Department of Survey and Mapping Malaysia (DSMM) has embarked on
the Airborne Gravity Survey, with one of the objectives is to compute the local
precise geoid for Malaysia within centimeter level of accuracy. With the availability
of the precise geoid, the "missing" element of GPS system has been solved. The
Malaysian geoid project (MyGEOID) is unique, where the whole country is being
covered with dense airborne gravity, with the aim to make the best possible national
geoid model.
The Malaysian airborne gravity survey has been done on a 5 km line spacing,
covering Sabah and Sarawak (East Malaysia) in 2002 and Peninsular Malaysia in
2003. The airborne gravity data system being used has been based on the Danish
National Space Center (DNSC)/University of Bergen system, which previously has
been based on a differential GPS for positioning,in terms of velocity and vertical
accelerations, with gravity sensed by a modified marine Lacoste and Romberg
gravimeter. The system has a general accuracy better than 2 mgal at 5 km resolution.
For the Malaysian project, a new GRACE satellite data combination models
are being used (GGM01C). This model is a combination model to degree a 180
based on 1° mean anomalies, essentially derived from the same terrestrial data as
EGM96, while having a superior new satellite information (GGM01S) at the lower
harmonic degrees.
A 3rd data source for the geoid determination is a digital terrain models
(DEM’s), which provide details of the gravity field variations in mountainous areas.
The handling of digital terrain models has been done by an analytical prism
integration, assuming a known rock density (Forsberg, 1984). The new satellite data
SRTM was used together with DSMM DEM’s for this purpose.
The computed geoid models for Peninsular Malaysia (WMG03A) as in
Figure 2.8 below.

25
Figure 2.8: Computed Final gravimetric geoid for Peninsular.Malaysia (WMG03A)

26
CHAPTER 3
THEORETICAL ASPECTS OF GPS LEVELLING, GEOID
FITTING AND VIRTUAL REFERENCE STATION
3.1 Introduction Most of the geodetic applications have been using a simple relationship,
exists between the three (3) different height types, derived from GPS, levelling and
geoid models. The combination of GPS heights with geoid heights to derive the
orthometric heights, can be used to eliminate the demanding and difficult task in
obtaining a precise spirit levelling, especially in mountainous areas where levelling
may be impossible due to the rough terrain and the lack of control points. This
relationship between the different height data has been employed as a mean of
computing an intermediate corrector surface used for the optimal transformation of
GPS heights and orthometric heights. Gravimetric geoid evaluation studies have also
been routinely based on the combination of such heterogeneous height data.
The combination of various height types is unavoidably plagued with the
complexities, encountered while dealing with data being obtained from different
sources such as GPS, spirit levelling and gravimetric geoid models. In order to take
advantage of the benefits achieved by using these data sets, a detailed evaluation of
their accuracy and optimal means for their combination must be performed. In
response to this, the theoretical aspects of GPS Levelling concept, Virtual Reference
Stations (VRS) and geoid fitting will be presented.

27
3.2 GPS Levelling Concept
Orthometric heights (H) refer to an equipotential reference surface (e. g. the
geoid). The orthometric height of a point on the earth surface is the distance from
that point to the geoid, measured along the plumb line normal to the geoid. Due to
the fact that equipotential surfaces are not parallel, this plumb line is a bend line.
Orthometric heights can be derived using geometric or trigonometric levelling.
Ellipsoidal heights (h) refer to a reference ellipsoid, e. g. the WGS-84
ellipsoid. The height of a point is being defined as the distance from the ellipsoid
measured along a normal to the reference ellipsoid. Ellipsoidal heights can be
derived from a geocentric cartesian coordinates provided by GPS observations. The
difference between both heights has been defined as the geoid height (N).
Figure 3.1: Relationship between Three Reference Surfaces
In order to convert the GPS derived ellipsoidal heights (h) to orthometric
heights (H), the geoidal height (N) at each point must be known:
H = h – N . Cos µ (3.1)
h
N
Topography
GEOID
ELLIP
SOID Ocean

28
Where,
µ = deflection of vertical.
In a practical ways, due errors in ellipsoid height (h) and geoid height (N),
relative GPS leveling (Figure 3.2) is a more preferred methods used by practitioners.
Figure 3.2: Relative GPS Levelling
Considering two points with known heights in both height systems (Figure
3.2), formula (3.1) can be written as:
H2 – H1 = (h2 – N2) – (h1 – N1)
dH21 = dh21 - dN21 (3.2)
Taking the distance d between both points into account the deflection of the vertical
µ is:
µ = Tan-1(dN/d)
= (dh - dH)/d.ρ” (3.3)

29
Using the meridian (ξ) and the prime vertical component (η) the deflection of the
vertical between two points P1 and P2 can be finally written as:
µ12 = ξ1. cos(t12) + η.sin(t12) (3.4)
where, t12 is the azimuth of the line P1P2.
Formula (3.2) - (3.4) provide several advantages: First, the knowledge of the absolute
values in either height system is not necessary for the derivation of the local
components of the deflection of the vertical. Second, the differential nature of (3.2)
will cancel out the errors in the height determination, affecting nearby points in a
similar way (e.g. atmospheric influences in GPS measurements). Third, the
determination of the deflection components and allows computation of the deflection
of the vertical in any azimuth.
However, in most cases the value of deflection of vertical (µ) is not more than
30”, and formula (3.1) can be written as:
H = h – N (3.5)
The combination of GPS derived ellipsoidal heights with geoidal information
for the purpose of orthometric height determination is called “GPS levelling“. The
accuracy of geoidal heights or vertical deflections derived by this new approach is
mainly being limited by the accuracy of the GPS observations. Orthometric height
differences (dH) can be easily determined with standard deviations valued less than 1
mm/km, where the accuracies for GPS-derived ellipsoidal height differences (dH)
will be significantly bigger.

30
3.3 Geoid Fitting
The most common method in geoid modelling techniques is by fitting a
surface on a reference points. In this fitted geoid modelling, the strategy is to fit the
gravimetric geoid for Peninsular Malaysia (WMG03A) to the geometric model or
sometimes referred to as a “GPS-geoid” (Forsberg 2000).
By using geoid information from GPS-levelling, long-wavelength geoid
errors can be supressed and the inherent datum differences can be eliminated.
The existence of datum bias (differences between geoid and local mean sea
level) will not gives satisfactory results if based on direct reduction formula (3.6). In
order to overcome this problem, fitting the gravimetric geoid onto the local mean sea
level (NGVD) will minimize the effect of datum biases.
However, it is essential when computing GPS geoid heights by (3.6) that
both levelling and GPS heights are as error-free as possible; otherwise these errors
will creep into the "fitted" geoid. Common sources of GPS heighting errors are
ionospheric biases and especially, errors in antenna heights. Similarly errors in
levelling can be systematic, generally not well-known, and dependent on the
levelling practices to a large degree.
The fitting of a gravimetric geoid - typically available in grid form - to a set of
GPS geoid heights entails modelling the difference signal and adding the modelled ε-
correction to the gravimetric geoid.
H-h=N levellingGPSGPS (3.6)
N-N= cgravimetriGPSε (3.7)

31
In this way, a new geoid grid is obtained which has been "tuned" to the levelling and
GPS datum in question.
The simplest models of the geoid difference is being taken as a constant bias
only, or polynomials like
where N and E are northing and easting coordinates. A special type of such regression
function, which have been found to work well in practice, is the 4-parameter "Helmert"
model:
Where, NGPS(i) and NGrav(i) are the geoidal height at point (i) obtained from
gravimetric and GPS-geoid models respectively. a1 to a4 are the four unknown
parameters, φi and λi are the latitude and longitude and R is the residuals geoid error
as describe in Heiskanen and Moritz, 1966.
Applying this model is equivalent to applying a 7-parameter Helmert
coordinate transformation, where the unknowns a1 to a3 corresponds to coordinate shifts
∆X, ∆ Y, ∆Z, and a4 to the scale factor (the geoid will to first order be invariant to
coordinate system rotations). This kind of regression should not be interpreted as a
rigorous coordinate transformation, since the parameters will absorb long-wavelength
geoid errors as well.
Polynomial style fits like equations 3.8 & 3.9 have the problem that ε can
obtain large unrealistic values in data voids or outside the GPS coverage. Therefore
collocation (combined with estimating a bias) is a more suitable method for
modelling the residuals. In the collocation process a covariance function must be
assumed for the residual geoid errors ε' (after fit of e.g. bias or 4-parameter model) as
a function of distance (s).
etc. aE+aN+NEa+Ea+Na+a = ; Ea+Na+a = ; a = 62
52
43213211 εεε (3.8)
ε = NGPS (i) - NGrav(i) = cosφicosλia1 + cosφisin λia2 + sinφia3 + Ria4 (3.9)

32
Such covariance function will be characterized by zero variance C0 and
correlation length s1/2 (distance where covariance function attained half its top value),
which in turn determine the degree of fit and the smoothness of the interpolated geoid
error. A quite simple covariance model will usually be sufficient. In the GEOGRID
collocation program of the GRAVSOFT software a second order Markov model (which
models Kaula's rule quite well) is used
where the constant α is the only quantity to be specified by the user, with
C0 automatically being adapted to the data. In the selection of correlation length and
noise of observed errors, the user has a large degree of freedom to select either a strong
fit to the GPS data or a more relaxed fit, diminishing the impact of any possible errors
in the GPS levelling data. As a hand rule, the correlation length should be selected to be
somewhat comparable to the station distance between the GPS-levelling points. If a
sufficient number of GPS points is available, the empirical covariance function of ε’
can be estimate.
),cov( = C(s) εε ′′ (3.10)
e s)+(1 C = C(s) s-0
αα (3.11)

33
3.4 Virtual Reference Station (VRS)
3.4.1 Introduction
Real-Time Kinematic (RTK) technique has been around for sometimes and a
centimeter-level real-time kinematic GPS system has been introduced in 1994. Most
of RTK positioning is being implemented in a conventional single-reference-station
mode, which is limited within 10 - 15 km from the reference station. In recent years,
the GPS research community started to investigate multiple-reference-station
networks to replace standard single-reference-station approaches, to enable a high
precision RTK positioning over longer distances.
The idea of a network RTK service has been around for many years.
However, the issues pertaining to the real-time resolution of the network integer
ambiguities, the optimal network correction parameterization schemes and
communication links, where potential users within or surrounding the network area
still being challenged with real-time applications. For Network RTK, an accurate
and reliable resolution of integer ambiguities of baselines between reference stations
of the network in real time is required.
An efficient method of transmitting corrections to the network users for RTK
positioning is via the virtual reference station (VRS) concept. Like the conventional
RTK, the VRS RTK technique has great potential for a precise navigation and
geodetic applications. This approach does not require an actual physical reference
station (among GPS receiver and data link). Instead, it allows for the user to access
data from a non-existent VRS at any location within the network coverage area. In
addition, the VRS approach is more flexible in terms of permitting users to use their
current receivers and software, without requiring any special software to manage the
corrections from a series of referenced stations simultaneously.

34
3.4.2 Errors in Global Positioning System (GPS)
The GPS system has been designed to be as nearly accurate as possible.
However, there are still errors. Added together, these errors can cause a deviation of
+/- 50 -100 meters (Wellenhoft, 1997) from the actual GPS receiver position. There
are several sources for these errors, the most significant discussed as below:
3.4.2.1 Atmosphere
The ionosphere and troposphere both refract the GPS signals. This causes the
speed of the GPS signal in the ionosphere and troposphere to be different from the
speed of the GPS signal in space. Therefore, the distance calculated from "Signal
Speed x Time" will be different for the portion of the GPS signal path that passes
through the ionosphere and troposphere and for the portion that passes through space.
a) Ionosphere
The ionosphere is an atmospheric layer situated from 50 to 1300 km above
the earth’s surface. It contains ionizing radiation, which causes the electrons to affect
the propagation of the signal. The ionosphere range error is dependent on a quantity
called Total Electron Content (TEC).
In the ionosphere, at the height of 80 – 400 km, a large number of electrons
and positive charged ions are being formed by the ionizing force of the sun. The
electrons and ions are concentrated in four conductive layers in the ionosphere.
These layers refract the electromagnetic waves from the satellites, resulting in an
elongated runtime of the signals. These errors are mostly corrected by the receiver
by calculations. The typical variations of the velocity while passing the ionosphere
for low and high frequencies are well known for standard conditions. These
variations are taken into account for all calculations of positions. However civil

35
receivers are not capable of correcting unforeseen runtime changes, for example by
strong solar winds.
It is known that electromagnetic waves are slowing down inversely,
proportional to the square of their frequency (1/f2) while passing the ionosphere. This
means that electromagnetic waves with lower frequencies are being de-accelerated
down more than electromagnetic waves with higher frequencies. If the signals of
higher and lower frequencies which reach a receiver are being analysed with regards
to their differing time of arrival, which renders the ionospheric runtime elongation
able to be calculated. Military-grade GPS receivers is using the signals of both
frequencies (L1 and L2), influenced in different ways by the ionosphere and able to
eliminate another inaccuracy by calculation.
b) Troposphere
The troposphere is a lower part of the earth’s atmosphere and its thickness
varies up to 10 km over the poles and up to 15 km over the equator. The troposphere
can cause a delay on the signal, dependent on the amount of water vapour. It mostly
affects the height component and may amount to 2.5 cm on a baseline of 50 km.
(Wahlund, 2002).
The tropospheric effect is a further factor, elongating the runtime of
electromagnetic waves by refraction. The reasons for the refraction are different
concentrations of water vapour in the troposphere, caused by different weather
conditions. Such error is smaller than the ionospheric error, unable to be eliminated
by calculation. It can only be approximated by a general calculation model.

36
3.4.2.2 Satellite Orbits
Although the satellites are being positioned in a very precise orbit, slight
shifting of the orbits are possible to happen due to gravitational forces. Sun and
moon impose a weak influence on the orbits. The orbit data are controlled and
corrected regularly and the package of ephemeris data are being sent to the receivers.
Therefore, the influence on the correct position determination is rather low, the
resulting error being not more than 2 m.
3.4.2.3 Clock errors
Despite the synchronization of the receiver clock with the satellite time
during the position determination, the remaining inaccuracy of the time still leads to
an error of about 2 m in the position determination. Rounding and calculation errors
of the receiver sums up approximately to 1 meter.
3.4.2.4 Multipath
The multipath effect is being caused by the reflection of satellite signals
(radio waves) on objects. It was the same effect that caused ghost images on the
television when antennae on the roof were still in use instead of today’s satellite
dishes.
For GPS signals, this effect mainly appears in the neighbourhood of large
buildings or other elevations. The reflected signal takes more time to reach the
receiver than a direct signal reception. The resulting error typically lies in the range
of a few meters. The sensitivity of GPS receivers against this multipath effect mainly
depends on the construction of the antenna. Patch-antennae are less sensitive than
Helix antennae. Both types have their advantages and disadvantages. When the
satellite constellation and reception conditions are good, patch-antennae provides

37
better reception accuracy since it is not influenced by reflections. However, when the
conditions are bad, a position determination with a reflected signal is recommended,
rather than not being able to determine any position at all.
3.4.2.5 Noise
If all the above mentioned errors are being modelled correctly and corrections
are applied to the position, it is still not the same position measured every time. The
reason for this, is because the presence of random noise in the measurements. This
random noise mainly contains the actual observation noise plus random constituents
of multipath (especially for kinematic applications) (Wellenhof, 2001). The pseudo
range noise for carrier measurements is 0.2 - 5 millimeters.
3.4.3 Virtual Reference Station Concept
The “Virtual Reference Station” concept has been based on having a control
center continuously connected via data links to a network of GPS reference stations.
A computer at the control center will continuously gathers the information from all
receivers, and creates a living database of Regional Area Corrections. These
databases are being used to create a Virtual Reference Station, situated only a few
meters from any randomly-situated rover, together with the raw data sourced from it.
The rovers interpret and utilize the data just as if it has come from real reference
station. The resulting performance improvement of RTK has been dramatic.
Works by Hu et. al. (2003) has shown that the implementation of the VRS
follows the following principles. First, at least three (3) reference stations connected
to the network server via communication links. VRS does not produce data from a
real receiver, but being generated from real GPS observations made by the active
multiple-reference-station network. The basic idea is to have VRS data to resemble
the data from real receiver, where it would have been produced at the same location.
The errors will be averaged as the VRS data are being computed from several

38
reference stations of the network. It can be concluded, the purpose of the VRS is to
generate data resembling those of a non-existent station situated close to the project
area.
The VRS data generation approach is being described in this section, which
focuses on the following.
1. Real-time ambiguity resolution of the baselines between the reference
stations of the network.
2. A correction generation scheme.
3. VRS data generation, with an emphasis on the real-time
implementation.
3.4.3.1 Real-Time Ambiguity Resolution
The advancement of GPS technology in the 90s, has led to numerous methods
to deal with the resolution of carrier phase ambiguities in real time or near real time.
One of the techniques is known as on-the-fly (OTF) (Blewit, 1989), it resolves
ambiguities with long baseline lengths. In order to generate the corrections of the
network for the user, dual-frequency carrier phase ambiguities of the baselines
between the reference stations of the network must first be fixed to their integer
values in real time. One of the important parameters to implement the correction
methodology is the provision of accurate network reference-station coordinates.
These may be provided by the local survey authority in the case of a permanent
regional reference network. Alternatively, they may be obtained through a static
survey of each station over a long period.
Ambiguity fixing between real-time network reference stations is difficult to
carry out, even with precisely known coordinates, especially for newly risen
satellites. As proposed by Sun et al. (1999), the method would be resolving of wide-
lane and then estimating the L1 and the relative tropospheric zenith delay (RTZD)
using the ionosphere-free observables via an adaptive Kalman filter. When the
estimated (float) L1 ambiguity meets specific criteria, the ambiguity will be fixed. In

39
order to help the network ambiguity resolution process, the orbital error de-
correlation can be reduced or eliminated using the IGS Ultra Rapid Orbit instead of
broadcast orbits. The precise ephemeris can be obtained from International GNSS
Service (IGS) analysis centre.
3.4.3.2 Correction Generation Scheme
Work by Dai et al. (2001) has showed that the performance to formulate
correction for the user using various methods is similar. The purpose of the
corrections is to reduce the influence of the spatially correlated errors. The
correction applied to the raw code and phase observations made by the user will
reduce or eliminate the influence of the atmospheric biases and other errors. This
condition will result in an improved positioning performance. Since the corrections
for the user in reality are an estimation of the residual errors. The corrections can be
estimated from the residuals in the L1 and L2 carrier phase measurements for each
satellite and epoch.
3.4.3.3 VRS Data Generation
In order to generate VRS data as though there is a reference station at the
coordinates of the user’s approximate position, with the user is positioned relative to
this VRS, the carrier phase and pseudorange observations from the master reference
station must be altered by applying the corrections on the network according to the
user’s approximate position (i.e. the VRS position). Next is letting the xs to be the
satellite position vector, xr as the master reference station position vector and xv as
the VRS position vector. At epoch (t), the geometric range between satellite and
master reference station receiver is:
rss
r xxt −=)(ρ (3.12)

40
and geometric range between satellite and VRS is;
vss
v xxt −=)(ρ (3.13)
The change in the geometric range )()( tt sr
sv
s ρρρ −=∆ can be applied to all
observations to displace the carrier phase and pseudorange observations from the
master reference station to the VRS position. After geometric corrections have been
applied to the master reference station raw data, corrections generated from Sect.
3.4.3.2 are being used on the VRS data. A standard troposphere model can be used to
correct tropospheric delay effects. Then the VRS data are generated in RTCM or
other acceptable format and ready to be delivered to the user.
3.4.4 Interpolation Technique
A major issue in implementing Virtual Reference Station (VRS) is the
selection of interpolation techniques usable for the distance-dependent biases
generated from the reference station network to the user's location. In the previous
years, several interpolation methods have been proposed by the renowned
researchers in order to interpolate or to model the distance-dependent residual biases.
The Virtual Reference Station technique via Trimble Navigation is merely an
implementation of the multiple-reference receiver approach, and all of the
aforementioned interpolation methods can be applied.

41
3.4.4.1 Linear Combination Model
Work by Han & Rizos (1996, 1998) has proposed a linear combination of
single-differenced observations to model the spatially correlated biases (i.e. orbit bias
∆ρorb,i , residual ionospheric bias ∆dion,i and residual tropospheric bias ∆dtrop,i ), and
to mitigate multipath ∆dφmp,i and noise ; _
(3.14)
where, n is the number of reference stations in the network, i indicates the ith
reference station, and u the user station. A set of parameters αi is estimated,
satisfying the following conditions:
(3.15)
(3.16)
(3.17)
where, and are horizontal coordinate vectors for the user station and the ith
reference station respectively. Based on Equations (shown in 3.15 - 3.18), the impact
of orbit errors can be eliminated while the ionospheric biases, tropospheric biases,
multipath and measurement noise can be significantly mitigated. As a result, the
double-differenced observables can be formed after the ambiguities in the reference
station network have been fixed to their correct integer values:

42
(3.18)
where, Vi, n (referred to her as the ‘correction terms’) is the residual vector generated
from the double-differenced measurements between reference stations n and i:
(3.19)
3.4.4.2 Distance-Based Linear Interpolation Method (DIM)
Gao et al. (1997) has suggested a distance-based linear interpolation
algorithm for ionospheric correction estimation, using the following equations:
(3.20)
(3.21)
(3.22)
where, n is the number of reference stations in the network, and di is the distance
between the ith reference station and the user station. is the double-differenced
ionospheric delay at the ith reference station.
In order to improve interpolation accuracy, two modifications were made by
Gao & Li (1998). The first modification is to replace the ground distance with a
distance defined on a single-layer ionospheric shell at an altitude of 350 km. The
second modification is to extend the model to take into account the spatial correction
with respect to the elevation angle of the ionospheric delay paths on the ionospheric
shell.

43
3.4.4.3 Linear Interpolation Method (LIM)
Suggestion by Wanninger (1995), regional differential ionospheric model
derived from dual-frequency phase data from at least three GPS reference stations
surrounding the user station. Unambiguous double-differenced ionospheric biases
can be obtained on a satellite-by-satellite and epoch-by-epoch basis after ambiguities
in the reference station network have been fixed to their correct integer values.
Ionospheric corrections for any station in the area can be interpolated by using the
known coordinates of the reference stations and approximate coordinates of the
station(s) of interest. Wübbena et al. (1996) extended this method to model the
distance-dependent biases such as the residual ionospheric and tropospheric biases,
and the orbit errors. Similar methods have been proposed by many researchers. For a
network with three or more stations, the linear model can be described by:
(3.23)
where ∆X and ∆Y are the plane coordinate differences referred to the master
reference station. Parameters a and b are the coefficients for ∆X and ∆Y (the so-
called 'network coefficients' according to Wübbena et al., 1996). In the case of more
than three (3) reference stations, the coefficients a and b can be estimated by a Least
Squares adjustment on an epoch-by-epoch, satellite-by-satellite basis. Then the GPS
user within the coverage of the network can apply the following 2D linear model to
interpolate the distance-dependent biases:
(3.24)

44
3.4.4.4 Least Square Collocation (LSC)
Least Squares Collocation has been used for many years to interpolate gravity
at any given location using only measurements at some discrete locations (e.g.,
Tscherning, 1974). The following is the basic interpolation equation:
(3.25)
where Cv is the covariance matrix of the measurement vector V , and Cuv is the cross-
covariance matrix between the interpolated vector and the measurements vector
V . If these covariance matrices are computed correctly, and the measurements
satisfy the conditions of zero mean and a normal distribution, Equation (3.25)
provides the optimal estimator (Raquet & Lachapelle, 2001). Least Squares
Collocation is also suitable to interpolate the distance-dependent biases in a network.
The challenge for this method is to calculate the covariance matrices Cv and
Cuv . The following covariance function was proposed (Raquet, 1998):
(3.26)
where the computation of the double-differenced covariance matrices can be
decomposed into two mathematical functions. First, a correlated variance function
which maps the zenith variance of the correlated errors over the network area is
computed:
(3.27)
where is the differential zenith variance of the correlated errors for
points pn and pm in the network. This function is based on the two-dimensional
distance d between the reference stations. k1 and k2 are constant coefficients (k1 =
1.1204e-4 and k2 = 4.8766e-7 for L1 phase in their paper). Secondly, a mapping

45
function is required to map both of the zenith errors (correlated and uncorrelated) to
the elevation of the satellite at each epoch:
(3.28)
where µ(ε) is a dimensionless scale factor which, when multiplied by the zenith
variance obtained from Equation (3.25), gives the correlated variance for the
specified satellite elevation e, and µk is a constant coefficient (µk = 3.9393 for L1
phase). Tests by Dai. et. al. (2001) has shown that the estimated corrections are not
sensitive to the choice of the covariance function. Based on the principles of Least
Squares Collocation, a practical interpolator for ionospheric biases (or tropospheric
biases) is (Odijk et al., 2000):
(3.29)
The spatial covariance function is linearly dependent on the distance between
the stations, or rather, the distance between their ionospheric pierce points:
(3.30)
In this covariance function is the distance between the ionospheric points of
stations k and l with respect to satellite s, with lmax > , where lmax is a distance
which is larger than the longest distance between the ionospheric points of the
stations in the network. Therefore, the larger the distance between the respective
points, the smaller the correlation.

46
3.4.4.5 Comparison
Several interpolation methods have been found suitable and compared in
detail for reference station network techniques, including the Linear Combination
Model, the Distance-Based Linear Interpolation Method, the Linear Interpolation
Method, and the Least Squares Collocation Method. The advantages and
disadvantages of each of these techniques have been discussed by Dai et. al. (2003),
and for all of the abovementioned methods, the essential common formula has been
identified. All use n-1 coefficients and the n-1 independent ‘correction terms’
generated from a n reference station network to form a linear combination that
mitigates spatially correlated biases at user stations.
Work by Dai et. al. (2003) using test data from several GPS/Glonass
reference station networks were being used to evaluate the performance of these
methods. The numerical results show that all of the methods for multiple-reference
receiver implementations can significantly reduce the distance-dependent biases in
the carrier phase and pseudo-range measurements at the user station. The
performance of all of the methods is similar, although the distance-dependent Linear
Interpolation Method does demonstrate slightly worst results in the two experiments
which have been analysed.

47
CHAPTER 4
METHODOLOGY FOR COMPUTATION AN ANALYSES OF
WMGeoid04 MODEL AND WMGeoid06A REVISED MODEL
4.1 Introduction
GPS infrastructures established in Malaysia are mainly serving as ground
control stations for cadastral and mapping purposes. Another element that has not
been utilised is the height component due to its low accuracy. Conventional
levelling is still the preferred method by land surveyors to determine the stations
orthometric height (H) with proven accuracy. Therefore, DSMM has embarked the
Airborne Gravity Survey, with one of the objectives is to compute the local precise
geoid for Malaysia within centimetre level of accuracy.
The Malaysian geoid project (MyGEOID) is unique, where the whole country
is being covered with dense airborne gravity, with the aim possibly to have the best
national geoid model. The basic underlying survey and computation work of the
Malaysian geoid project has been done by the Geodynamics Dept. of the Danish
National Survey and Cadastre (KMS; since Jan 1 part of the Danish National Space
Center) in cooperation with DSMM. With the new data, the geoid models are
expected to be a much improved version over the earlier models (Kadir et al. 1998).

48
4.2 MyGeoid for Peninsular Malaysia
The main objective of the Malaysian geoid model (MyGEOID) is to enable
the computation of orthometric heights (H) which refer to the national geodetic
vertical datum (NGVD). Mathematically, there is a simple relation between the two
reference systems (neglecting the deflection of the vertical and the curvature of the
plumb line):
H = hGPS – N (4.1)
where, hGPS is the GPS height above the ellipsoid and N the geoid separation. In the
above equation it is important to realize that H refers to a local vertical datum, while
hGPS refers to a geocentric system (ITRF/WGS84), where the computed (gravimetric)
geoid are usually being referred.
In practice, the expression shows the possibility of using GPS leveling
technique, knowing the geoidal height N, the orthometric height H can be calculated
from ellipsoidal height h. Deriving orthometric height using this technique with
certain level of accuracy, could replace conventional spirit leveling and therefore
make the levelling procedures at a much cheaper cost and faster rate of execution.
The existence of datum bias (differences between geoid and local mean sea
level) will not gives satisfactory results if based on the above formula. In order to
overcome this problem, fitting the gravimetric geoid onto the local mean sea level
(NGVD) will minimize the effects of datum biases.
4.2.1 Gravity Data Acquisition
The Malaysian airborne gravity survey has been done on a 5 km line spacing,
covering mostly Sabah and Sarawak in 2002 and Peninsular Malaysia in 2003. The
airborne gravity data system used is being based on the Danish National Space
Center (DNSC)/University of Bergen system, used extensively for the Arctic gravity

49
field mapping. The system is being based on differential GPS for positioning,
velocity and vertical accelerations, with the gravity sensed by a modified marine
Lacoste and Romberg gravimeter. The system has a general accuracy better than 2
mgal at 5 km resolution.
For Malaysia airborne survey, the system has been installed in a AN-38
aircraft, and the aircraft turned out to be very suitable for the airborne survey, with
accuracies estimated from cross-overs well below 2 mgal r.m.s.
The airborne gravity survey then flown at different elevations, at a permissible
topographic conditions (see Figure 4.1 and 4.2). The data were therefore required to
be downward continued to the surface, before applying the Stokes formula gravity to
geoid transformation. The downward continuation has been done by least-squares
collocation using the planar logarithmic covariance model (Forsberg, 1987), using all
available gravity data in the process (such as from the airborne, surface, marine and
satellite altimetry gravity data). The Stokes’ integration has been implemented by
spherical FFT methods (Forsberg and Sideris, 1993).
The existing surface gravity data coverage was only significant in Peninsular
Malaysia (Figure 4.2). Here, the relatively dense surface gravity data coverage in the
lowlands will strengthen the geoid compared to the situation in Sabah and Sarawak,
where a minimum gravity data was available.

50
Figure 4.1: Airborne Gravity Flight lines in Peninsular Malaysia
Figure 4.2:Surface gravity coverage in Peninsular Malaysia
(colours indicate anomalies)

51
4.2.2 Gravimetric Geoid Computation
The gravimetric geoid height N is in principle determined by Stokes’
equation of physical geodesy, which gives the expression of the geoid height N as an
integral of gravity anomalies around the earth (σ)
σψπγ σ
)d S(g 4
R = N ∆∫∫ (4.2)
where, ∆g is the gravity anomaly, R earth radius, γ normal gravity, and S a
complicated function of spherical distance ψ (Heiskanen and Moritz, 1966). In
practice global models of the geopotential from analysis of satellite data and global
mean gravity anomalies are used, e.g. for the current global model EGM96 (Lemoine
et al., 1996).
( ) ( )φλλγ
sinsincos02
96 nm
n
mnmnm
nN
nEGM PmSmC
rR
RGMN ∑∑
==
+⎟⎠⎞
⎜⎝⎛= (4.3)
For the Malaysian project, a new GRACE satellite data combination models
were used (GGM01C). This model is a combination to degree 180 based on 1° mean
anomalies, derived from the same terrestrial data as EGM96, but with superior new
satellite information (GGM01S) at the lower harmonic degrees.
A 3rd data source for the geoid determination is a digital terrain models
(DEM’s), which provide details of the gravity field variations in mountainous areas
(the mass of the mountains can change the geoid by several 10’s of cm locally). The
handling of digital terrain models is being done by an analytical prism integration
assuming known rock density (Forsberg, 1984). For this purpose, the new satellite
data SRTM is being used together with DSMM DEM’s.

52
With the data from spherical harmonic models, local or airborne gravity, and
DEM’s, the (gravimetric) geoid is being constructed by remove-restore techniques as
a sum as below:
N = NEGM + Ngravity + NDEM (4.4)
The summary of gravity data used in the gravimetric geoid computation are
tabulated in Table 4.1 and the computed geoid models for Peninsular Malaysia
(WMG03A) as in Figure 4.2.
Table 4.1: Gravimetric Geoid Technical Details
Data WMG03A
Gravity Data Terrestrial = 5634 points Airborne = 24 855 points
Grid Ranges 0° – 8° N
98° – 107° E
Contour Range -16 meter – 10 meter
Grid Interval 1’ x 1’
Altimetry Data KMS02
DEM Model DTED/SRTM
Terrain Resolution DTED = 3”
SRTM = 30”
Computation Technique 2-D FFT
Global Geopotential Model GGM01C
Reference Frame ITRF2000 (GDM2000)

53
Figure 4.3: Final gravimetric geoid for Peninsular Malaysia (WMG03A). Contour interval is 1 meter.
4.3 WMGeoid04 Fitted Geoid Model
4.3.1 GPS Data Acquisition
GPS observation on Benchmark project has been done by DSMM in 2003
and 2004 respectively. GPS Observation period for the data sets are between 4-9
hours, with the observations being divided into three separate network for Peninsular,
Sabah and Sarawak. A total of 53 stations have been observed in Peninsular
Malaysia and tabulated in Table 4.2, and stations distribution are as in Figure 4.4.
Table 4.2: Station Breakdown for Data Set 1 No. Station Type Peninsular 1. MASS Stations 9 2. GPS Station 5 3. SBM or Eccentric/ Benchmark 39 Total 53

54
Figure 4.4: Station's Distribution for Peninsular Malaysia
4.3.2 GPS Data Processing and Adjustment
Bernese GPS Post Processing Software Version 4.2 has been used to process
the whole GPS campaign data for Peninsular. The standard processing strategy (as
employed by DSMM) is being used with the following parameters for Bernese 4.2.
Those parameters are:
• Independent Baseline
• IGS Final/Rapid Orbit
• Baseline Wise Solution
• QIF Strategy for Ambiguity Resolution
• 30/60 minutes – Troposphere Estimation
99.5 100 100.5 101 101.5 102 102.5 103 103.5 104
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5 ARAU
BEHR
GETI
KTPK
KUAL
KUAN
SEGA
USMP
UTMJ
GP42
GP47
GP53
P0276
P255
S0047
S0048
S0050
S0054
S0061
S0065
S0102
S0118
S0130
S0154
S0168
S0199
S0202
S0220
S0276S0317
S0346
S0372
S0413
S0475
S0483
S0487
S0501
E0008
E0200
E0221E0313
E0415
E1001
E1142
E1281
E1401
E1461
E1901
E2392
E3571
E4901
E9921
C2638

55
The output from the data processing is the stations coordinates with its
respective covariances and the resolved baseline ambiguity is at the level between
60 - 90%. The low percentage of ambiguity resolution was due to poor quality of
GPS data and including from the short data set.
The GPS network adjustment has been performed, using Geolab adjustment
software from Microsearch Corporation for Peninsular Malaysia GPS. The
adjustment of the network is based on the new Geocentric Datum for Malaysia 2000
(GDM2000) and the standard error modeling and scaling have been adopted. The
statistics of the adjustment results are tabulated in Table 4.3, and distribution of error
ellipses as in Figure 4.5 .
Table 4.3: Network Adjustment Statistics
No. Parameter Peninsular 1. No of Stations 53 2. No of Parameters 138 3. No of Observations 723 4. Degree of Freedom 585 5. Average Baselines Length 69 km 6. Chi-Square Test Passed 7. Flag Residuals (Pope’s Tau) No 8. 2D Error Ellipses (95%) 0.009 – 0.020 m 9. 1D Error Ellipses (95%) 0.010 – 0.027 m 10. Relative 2D Error Ellipses (95%) 0.009 – 0.017 m 11. Relative 1D Error Ellipses (95%) 0.009 – 0.028 m 12. Baseline Precision 0.10 – 0.65 ppm

56
Figure 4.5: Network Error Ellipses (Absolute (Left) & Relative (Right)) 4.3.3 WMGeoid04 Fitted Geoid Computation
The final gravimetric geoid, computed in para 4.2.2 – is called “WMG03A.gri”
- is a gravimetric geoid, in principle corresponding to a global vertical datum. The
main purpose of the Malaysian geoid project is to have a geoid consistent with GPS,
i.e. referring to local sea-level. For this purpose we have to use GPS-levelling geoid
heights
NGPS = hGPS - Hlevelling (4.5)
and the “GPS corrector” difference
ε = NWMG03A - NGPS (4.6)
have to be empirically modeled by a Helmert trend surface and/or collocation, as
described in Chapter 3, para 3.3.

57
A new GPS levelling data set of 39 points in Peninsular Malaysia from para
4.3.1 has been used for fitted geoid computation. The GPS levelling data sets has
been screened for inconsistencies by using GEOIP program with every NGPS Lev.
value for GPS levelling stations compared with NWMG03A from WMGeoid03A
gridded models.
Table 4.4: Comparison Statistics
No. ∆N Unit (M) 1. Minimum 1.001 2. Maximum 1.492 3. Mean 1.314 4. Standard Deviation 0.079
Figure 4.6: ∆N Variation
Table 4.4 and Figure 4.6, shows the comparison statistics and the ∆N
variation from the first data screening. The ∆N variation range between 0.95 - 1.60
99.5 100 100.5 101 101.5 102 102.5 103 103.5 104
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
C2638
E0008
E0200
E0221E0313
E0415
E1001
E1142
E1281
E1401
E1461E1901
E2392
E3571
E4901
E9921
S0047
S0048
S0050
S0054
S0061
S0065
S0102
S0118
S0130
S0154
S0168
S0199
S0202
S0220
S0276S0317
S0346
S0372
S0413
S0475
S0483
S0487
S0501
0.951.001.051.101.151.201.251.301.351.401.451.501.55

58
m, with two stations namely S0220 (minimum Diff.) and E1142 (maximum Diff.)
shows the bull-eyes characteristic. Investigation on the suspected stations shown that
E1142 located on the highland (Cameron Highland) and S0220 is at the tip of
Peninsular Malaysia (Sungai Rengit). Both SBM connected using precise levelling
survey but not in the levelling loop form (hanging line). The levelling lines are also
not inline with the main adjustment of the Peninsular Malaysia Precise Levelling
Network.
To fit the gravimetric geoid to GPS, a least-squares collocation method has
been used as a common trend parameter with a single bias. For the final fit, a number
of different collocation parameters σ (standard deviation of GPS leveling) of 0.030 m
and correlation length of 2nd order Markov covariance function of 80 km was used as
listed in Table 4.5.
Table 4.5: LSC Fitting Parameters
No. Parameter Peninsular 1. Strategy Bias Estimation 2. Maximum Station per Quadrant 24 3. Correlation Length 80 km 4. Number of Collocation Benchmarks 37 5. Apriori Sigma 0.03 meter 6. Grid Ranges
North/South East/West
1° - 8° North
99° - 105° East 7. Grid Interval 1’
For the final computation, S0220 and E1142 are being excluded from the
process, and the results show an improvement with the corrector surface is well
distributed (Figure 4.7). The corrector surface range is between 1.14 – 1.44 meter
with the formal standard error is 0.020 m in the least square collocation adjustment.

59
Figure 4.7: Corrector Surface plotted from Iteration-2 results 4.3.4 Analyses of WMGeoid04 Fitted Model
For the evaluation of WMGeoid04 quality, 37 SBM/BM that were used for
the surface fitting process were compared with the Wgeoid04 model.
Table 4.6: LSC Fitting Statistics Table 4.6, shows the statistics of LSC and the standard error of the fitting is
0.020 meter. There is a risk in accepting the value, as the formal error with the
WMGeoid04 and the SBM/BM are highly correlated. But the value can be used as
an indicator for the internal quality assessment of WMGeoid04 model.
99.5 100 100.5 101 101.5 102 102.5 103 103.5 104
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
C2638
E0008
E0200
E0221E0313
E0415
E1001E1281
E1401
E1461E1901
E2392
E3571
E4901
E9921
S0047
S0048
S0050
S0054
S0061
S0065
S0102
S0118
S0130
S0154
S0168
S0199
S0202
S0276S0317
S0346
S0372
S0413
S0475
S0483
S0487
S0501
1.14
1.18
1.22
1.26
1.30
1.34
1.38
1.42
points predicted: 37, skipped points: 0 minimum distance to grid edges for predictions: 147.5 km statistics: mean std.dev. min max unknown original data (pointfile) : -2.847 5.919 -14.311 7.613 0 grid interpolation results: -2.847 5.918 -14.302 7.608 0 predicted values output : 0.000 0.020 -0.059 0.041 0

60
4.3.4.1 External Data Sets
In order to have a more realistic assessment of the WMGeoid04 model,
comparison with independent data sets have been done. There are three data sets
namely DS-1, DS-2 and DS-3 are available for testing purposes. The GPS data set
DS-1, DS-2 and DS-3 were observed from 1997 – 2003 and was re-adjusted using
GDM2000 for testing and analysis purposes of the fitted geoid model. The summary
of the data set are as follow:
a) Data Set DS-1 Data Set DS1 was observed in 1997 in Johor State of Peninsular Malaysia
with baseline distances are ranged between 5 and 35 km. The stations breakdown is
shown in Table 4.7 and the statistical analysis of the network adjustment are as in
Table 4.8 and 4.9 respectively, with error ellipses distribution as in Figure 4.8.
Table 4.7: Station Breakdown for Data Set DS-1
No. Station Type # Number 1. GPS Station 21 2. BM/SBM 50 Total 71
Table 4.8: Absolute Errors (Data Set DS-1) Semi-Major (m) Semi-Minor (m) Vertical (m) Maximum 0.033 0.032 0.040 Minimum 0.012 0.012 0.012 Average 0.017 0.016 0.020
Table 4.9: Relative Errors (Data Set DS-1) Semi-Major (m) PPM Vertical (m) PPM
Maximum 0.033 7.88 0.040 9.02 Minimum 0.008 0.29 0.009 0.34 Average 0.017 1.18 0.020 1.40

61
Figure 4.8: Station's Horizontal & Vertical Errors (Data Set DS-1) b) Data Set DS-2 Data Set DS-2 has been observed in 2003 by DSMM with Trimble's
4000SSE/I receivers. A total of 96 stations (Figure 4.9) were observed that included
10 GPS stations, and the remaining are data which has been observed on
Benchmarks. The observation period for each station is 1.5 hours with each of the
stations has been observed twice. The statistical analysis of the network adjustment
is being shown in Table 4.10 and Table 4.11 respectively.
Table 4.10: Absolute Errors (Data Set DS-2) Semi-Major (m) Semi-Minor (m) Vertical (m) Maximum 0.061 0.057 0.083 Minimum 0.023 0.023 0.027 Average 0.035 0.033 0.045

62
Table 4.11: Relative Errors (Data Set DS-2) Semi-Major (m) PPM Vertical (m) PPM
Maximum 0.061 7.20 0.085 23.53 Minimum 0.011 0.27 0.019 0.30 Average 0.035 1.99 0.046 2.74
Figure 4.9: Station's Distribution for Data Set DS-2 c) Data Set DS-3 Data Set DS-3 was observed in 1997 for Perak State with baseline distances
are between 4 - 85 km. The stations’ statistical analyses of the network adjustment
are in Table 4.12 and 4.13, respectively.
Table 4.12: Absolute Error (Data Set DS-3) Semi-Major (m) Semi-Minor (m) Vertical (m) Maximum 0.022 0.022 0.029 Minimum 0.011 0.010 0.011 Average 0.015 0.015 0.018
102.6 102.8 103 103.2 103.4 103.6 103.8 104 104.2
Longitud
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
Latit
ud
P114
GP15
GP16
GP47
GP49
GP50
GP59
GP61
GP84GP85
SEGA
UTMJ
Taburan Stesen Cerapan GPSProjek Cerapan GPS Tanda Aras
Stesen MASS
Stesen GPS
Tanda Aras

63
Table 4.13: Relative Errors (Data Set DS-3)
Semi-Major (m) PPM Vertical (m) PPM Maximum 0.023 7.20 0.030 4.39 Minimum 0.010 0.27 0.013 0.32 Average 0.015 1.99 0.019 1.38
4.3.4.2 Analysis
The basic formula for quality assessments are as follows:
HWgeoid04 = hgps – NWgeoid04 (4.7)
δH = HWgeoid04 - HNGVD (4.8)
Where,
HWgeoid04 : Orthometric Height Derived from GPS and Fitted Geoid Model
hgps : Ellipsoidal Height
NWgeoid04 : Geoid Height from Fitted Geoid Model
HNGVD : Published Levelling Height
δH : Height Difference
Figure 4.10 and Figure 4.11; show the statistics of height differences for data
set DS-1. Two stations were suspected to be outliers (exceeding 2*RMS (2σ)) and
were excluded from the final computation. The RMS of Difference is 0.042 meter
with percentage of rejected data is 5.7%. The computation of RMS of Difference is
using the following formula:
nRMS
n
iiH∑δ
== 1
2
(4.9)

64
Figure 4.10: Height Diff. (δH) Data Set DS-1 – Iteration 1
Figure 4.11: Height Diff. (δH) Data Set DS-1 – Iteration 2
For data set DS-2, the statistics of height differences, depicted in Figure 4.12
and Figure 4.13. Seven stations have been excluded from the computation due to
their large error and threat as outliers. The RMS of difference is 0.042 meter with
total of rejected data is 15.9%.
Height Difference (Derived - Published)
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
J 00
60
J 00
87
J 01
41
J 01
51
J 01
84
J 02
41
J 02
49
J 02
60
J 04
16
J 04
81
J 04
84
J 05
52
J 05
84
J 06
17
J 06
78
J 06
95
J 07
00
J 07
66
J 07
82
J 08
31
J 10
37
J 11
33
J 11
99
J 12
20
J 12
36
J 12
49
J 12
75
J 13
30
J 13
77
J 14
44
J 15
13
J 16
09
S 00
15
S 00
73
S 09
92
Benchmark
Hei
ght D
iffer
ence
(m)
Height Difference (Derived - Published)
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
J 00
60
J 00
87
J 01
41
J 01
51
J 01
84
J 02
41
J 02
49
J 02
60
J 04
16
J 04
81
J 04
84
J 05
52
J 05
84
J 06
17
J 06
78
J 06
95
J 07
00
J 07
66
J 07
82
J 08
31
J 10
37
J 11
33
J 11
99
J 12
20
J 12
36
J 12
49
J 12
75
J 13
30
J 13
77
J 14
44
J 15
13
J 16
09
S 0
015
S 0
073
S 0
992
Benchmark
Hei
ght D
iffer
ence
(m)
Outlier 1
Outlier 2

65
Figure 4.12: Height Diff. (δH) Data Set DS-2 – Iteration 1
Figure 4.13: Height Diff. (δH) Data Set DS-2 – Iteration 2
The final data set for comparison purposes is data set DS-3. Figure 4.14 and
Figure 4.15; show the statistic of height difference for data set DS-3. Four stations
have been found to be outliers and excluded from the computation. The RMS of
difference is 0.038 meter and rejected data is 11.1%.
Height Difference (Derived - Published)
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
J002
2
J007
7
J024
9
J041
2
J048
3
J064
9
J069
9
J091
5
J092
1
J092
4
J104
6
J108
2
J126
1
J134
9
J135
8
J136
5
J137
5
J142
3
J142
7
J145
0
J151
3
J152
3
J152
7
J156
2
J157
7
J159
3
J165
5
J166
7
J168
5
J169
2
J169
9
J171
2
J173
1
J174
0
J176
7
J177
4
J187
6
J250
7
J256
6
J267
6
J312
2
J313
6
J314
6
J327
5
Benchmark
Hei
ght D
iffer
ence
(m)
Height Difference (Derived - Published)
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
J002
2
J007
7
J024
9
J041
2
J048
3
J064
9
J069
9
J091
5
J092
1
J092
4
J104
6
J108
2
J126
1
J134
9
J135
8
J136
5
J137
5
J142
3
J142
7
J145
0
J151
3
J152
3
J152
7
J156
2
J157
7
J159
3
J165
5
J166
7
J168
5
J169
2
J169
9
J171
2
J173
1
J174
0
J176
7
J177
4
J187
6
J250
7
J256
6
J267
6
J312
2
J313
6
J314
6
J327
5
Benchmark
Hei
ght D
iffer
ence
(m)

66
Figure 4.14: Height Diff. (δH) Data Set DS-3 – Iteration 1
Figure 4.15: Height Diff. (δH) Data Set DS-3 – Iteration 2 Evaluation of WMGeoid04 fitted geoid models using data sets DS-1, DS-2
and DS-3 shows that the accuracy is 0.033 meter, based on the following formula.
σ2 = (σ2DS-1 + σ2
DS-2 + σ2DS-3)/n (4.10)
This value is bigger when compared to the formal error of 0.020 m from the
formal error statement. Out of 115 benchmarks which have been evaluated (DS-1,
DS-2 and DS-3), only 13 benchmarks (11.3%) have been excluded.
Height Difference (Derived - Published)Perak
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
A00
85
A00
89
A00
92
A01
23
A01
52
A03
63
A04
24
A05
00
A05
85
A06
00
A06
35
A07
01
A07
26
A08
32
A08
40
A09
33
A09
74
A09
79
A09
83
A12
85
A13
81
A13
96
A15
55
A15
97
A16
01
A16
06
A16
22
A18
02
A18
31
A18
39
S00
91
S03
76
S03
79
S04
11
S04
61
S04
62
Benchmark
Hei
ght D
iffer
ence
(m)
Height Difference (Derived - Published)Perak
-0.300
-0.250
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
0.200
0.250
0.300
A00
85
A00
89
A00
92
A01
23
A01
52
A03
63
A04
24
A05
00
A05
85
A06
00
A06
35
A07
01
A07
26
A08
32
A08
40
A09
33
A09
74
A09
79
A09
83
A12
85
A13
81
A13
96
A15
55
A15
97
A16
01
A16
06
A16
22
A18
02
A18
31
A18
39
S00
91
S03
76
S03
79
S04
11
S04
61
S04
62
Benchmark
Hei
ght D
iffer
ence
(m)

67
The value of 0.033 meter for the accuracy of WMGeoid04 may be too
optimistic when a total number of Benchmarks used for the fitting is only 37 which
are connected with the average of 75 km baseline length. Any error such as
inaccurate antenna height measurement or inaccurate troposphere modeling during
data processing will propagate into the baseline vectors. These errors will directly
affect the ellipsoidal height (h) accuracy for every benchmark.
The 37 benchmarks used for the final surface fitting also have not been
equally distributed, where certain areas were not covered. The independent data sets
also have a variation of ellipsoidal height accuracy, which ranged from 0.011 - 0.087
meters. These accuracy variations are not taken into considerations when computing
the RMS differences and it certainly give an impact on the final value of the quality
assessment.
However, from a total of 115 benchmarks which have been evaluated using
DS-1, DS-2 and DS-3 data sets, only 13 benchmarks (11.3%) were found to be
outliers. This clearly shows that WMGeoid04 model can detect the status of the
Benchmarks that could possibly being shifted due to a disturbance or by seasonal
factor (weather).

68
4.4 WMGeoid06A Fitted Geoid Model
4.4.1 Introduction WMGeoid06A is the improvement of WMGeoid04 model with new
information has been gathered and introduced into the latest model. However, in
terms of area coverage, there is only a partial improvement from the WMGeoid04.
The new information is only available for the west coasts and the whole state of
Johor. This section will not try to compute a new geoid model for Peninsular
Malaysia because the new information does not cover the whole area, but more
towards preliminary quality assessment of the new models over certain areas.
The new information which has been gathered together, came from new GPS
observation on benchmarks, upgrading of several levelling lines to precise levelling
specification and also the availability of Malaysian Real Time Kinematic GPS
Network (MyRTKnet) GPS network. This new information will be increasingly
available from time to time and the new geoid model can be computed when it
covers the whole Peninsular Malaysia.
4.4.2 GPS Data Acquisition
A new GPS observation on benchmark project has been initiated in the early
2006 and completed by end of the same year. The data set have been processed to be
used in the new geoid model computation. GPS Observation period for the data sets
were 12 hours, with every session are being controlled and connected to the
Malaysian Active GPS System (MASS) or MyRTKnet stations. A total of 187
stations have been observed, including GPS permanent stations, Standard Benchmark
(SBM) and ordinary Benchmark (BM). Stations distribution as shown in Figure
4.16.

69
Figure 4.16: Station's Distribution for 2006 Data
4.4.3 GPS Data Processing and Adjustment
The newly acquired Bernese GPS Post Processing Software Version 5.0 has
been utilised to process the 2006 GPS campaign data. The standard processing
strategy with minor changes as what have been employed by DSMM is being used
with the following parameters for Bernese 5.0:
• Independent Baseline
• IGS Final
• Baseline Wise Solution
• QIF Strategy for Ambiguity Resolution
• 60 minutes – Troposphere Estimation
The output from the data processing are the stations coordinates with its
respective covariances together with the resolved baseline ambiguity at the average
99.5 100 100.5 101 101.5 102 102.5 103 103.5 104
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
A0540
A1122
A1729
A1779
A1806
A1914
A2079
A2176
A2547
A2563
A2599
A2659
A3038A3139
A3233A3245
A3365
B0085
B0170
B0356
B0793 B0855
B0873
B0898
B1013B1305
B1328
B1341
B1501
B1707
B1819
B1847
B2039
B2208
E0014
E0015
E0068
E0096
E0100
E0106
E0117
E0127
E0128
E0146
E0170
E0190
E0198
E0252
E0253E0267
E0275
E0296
E0313
E0357
E0377
E0379
E0415
E0491
E0501
E0898
E0992
E1013
E1038
E1065
E1142
E1156
E1191
E1220
E1247
E1775E2049
E2985
E3719
E4901
H0368
H0427
J0414
J0678
J0699
J1011
J1364
J1383
J1430
J1667
J2885
J3041J3173J3187
J3203
J3218
J3276
J3547
J3608
J3655
J3741
J3821
J3904
J4108
K0547
K1615
M1015
N0603
N0784N0828
N1567
N1585
N2329
P0246
R0417
S0017
S0025
S0070
S0083
S0087
S0091
S0108
S0118
S0130
S0147
S0168
S0177
S0180
S0201S0202
S0209
S0220
S0276
S0310
S0311
S0335
S0337
S0341
S0346
S0355
S0372
S0393
S0413
S0416S0417
S0424
S0431
S0461
S0475
S0483
S0487
S0496
S0500
S1008S1014
S1023
S1053
S1082
S1150
S1151
S1155
S1160
S1165
S2392
LGKW
SGPT
JUIP
KKBH
MERU
MARG
RTPJ
BABH
SELM
GMUS
GRIK
JUML
KLAW
TLOH
KLUG
MERS
KUKP
PEKN
TGPG
UUMK
BANT
UPMS
BKPL
JHJY
PUPK
ARAU
BEHR
KUAL
GETI
USMP
SEGA
UTMJ
KUAN
KTPK
IPOH
MASS Station
MyRTKnet Station
BM/SBM

70
of 90%. The improvement of percentage in ambiguity resolution is due to
enhancement in Bernese 5.0, as well as shorter baselines distance in the GPS project.
Geolab adjustment software from Microsearch Corporation is being used
again to adjust the GPS 3-Dimensional vectors. These network adjustments is being
based on the new Geocentric Datum for Malaysia 2000 (GDM2000) and it has
adopted the standard error modelling and scaling adjustment.
Due to mega-thrust earthquake in Sumatra on 26th December 2004 and
another on 28th March 2005, the permanent stations in Malaysia have been displaced
horizontally between 2 - 34 centimetre (Samad, Chang & Soeb, 2005). However, the
vertical component does not show any sign of deformation for permanent stations in
Malaysia or from study that has been made on precise levelling network (Samad,
Chang & Soeb, 2006). Due to that fact, the permanent networks that consists of
MASS and MyRTKnet was re-processed using three (3) days data while the UTMJ
station has been held fixed for the minimally constrained adjustment.
Figure 4.17: Error Ellipses of 3-Days Adjustment

71
The revised coordinates of MASS and MyRTKnet stations were being used
as fiducial points for the subsequent adjustment of Benchmark network. The
statistics of the adjustment results are shown in Table 4.14 and error ellipses
distribution as in Figure 4.18.
Table 4.14: Network Adjustment Statistics
No. Parameter Peninsular 1. No of Stations 187 2. No of Fixed Stations 21 3. No of Observations 1251 4. Degree of Freedom 753 5. Average Baselines Length 25 km 6. Chi-Square Test Passed 7. Flag Residuals (Pope’s Tau) No 8. 2D Error Ellipses (95%) 0.008 – 0.036 m 9. 1D Error Ellipses (95%) 0.008 – 0.051 m 10. Relative 2D Error Ellipses (95%) 0.009 – 0.041 m 11. Relative 1D Error Ellipses (95%) 0.009 – 0.048 m 12. Baseline Precision 0.10 – 2 ppm
Figure 4.18: Network Error Ellipses (Absolute (Left) & Relative (Right))

72
4.4.3.1 Comparison
The 2006 GPS campaign on Benchmark has also included points which are
common to GPS campaign, as carried out in 2004. Comparison on height component
between the two GPS campaign has been done between them to determine if any
existence of irregularities.
Table 4.15: Ellipsoidal Height Difference
Station Ellipsoidal Height (m) 2004 2006 Difference (m)
E0100 28.179 28.186 0.007 E0128 60.916 60.895 -0.021 E0146 37.969 37.975 0.006 E0190 6.163 6.098 -0.065 E0313 -4.006 -4.010 -0.004 E0415 38.782 38.783 0.001 E0992 34.876 34.876 0.000 E1142 1274.844 1274.822 -0.022 E4901 3.580 3.532 -0.048 S0220 13.341 13.413 0.072 S0118 273.087 273.038 -0.049 S0130 8.162 8.169 0.007 S0168 -10.673 -10.718 -0.045 S0202 69.214 69.176 -0.038 S0276 100.387 100.339 -0.048 S0346 -3.428 -3.434 -0.006 S0372 2.140 2.174 0.034 S0413 23.545 23.480 -0.065 S0475 -6.955 -6.974 -0.019 S0487 17.283 17.252 -0.031
Table 4.15 shows the height difference between the two campaigns varies
from -6.5 to 7.2 centimetres. The RMS difference is 3.3 centimetres with three (3)
stations (E0190, S0220 and S0413) having bigger height differences. The RMS will
be reduced to 2.4 centimetres if all the three (3) stations are being excluded from the
computation. The RMS of 2.4 centimetres is considerably fine if the baseline length,
observation length and two (2) years epoch difference of the former campaign being
taken into account.

73
The new height information will be used for the new computation of geoid
model and will be combined with selected former data.
4.4.4 Mean Sea Level Information
The height information for all Benchmarks has been based on the adjustment
of Precise Levelling Network which has been done in 1998. There is a new update
value of SBM S0220 when the levelling line was upgraded recently by carrying out a
precise levelling survey.
4.4.5 WMGeoid06A Fitted Geoid Computation A newly-combined GPS levelling data set of 165 points in Peninsular Malaysia
from two (2) GPS campaigns were being used to compute the revised fitted geoid
model called WMGeoid06A. GEOIP program from Gravsoft computation package
has been used for data screening, detecting any inconsistencies. The program
screened every NGPS Lev. value from GPS levelling stations compared with NWMG03A
from WMGeoid03A gridded models.
With a large amount of GPS levelling data, the filtering process has been time-
consuming and there are many suspected outliers that probably came from ellipsoidal
height (h), Benchmark value (H) or the gravimetric geoid itself. Least squares
collocation input parameters for iteration one (1) are listedin Table 4.16, and the
adjustment statistics from are shown in Table 4.17 with corrector surface as in Figure
4.19.

74
Table 4.16: LSC Fitting Parameters
No. Parameter Peninsular 1. Strategy Bias Estimation 2. Maximum Station per Quadrant 24 3. Correlation Length 50 km 4. Number of Collocation Benchmarks 165 5. Apriori Sigma 0.03 meter 6. Grid Ranges
North/South East/West
1° - 8° North
99° - 105° East 7. Grid Interval 1’
Table 4.17: Comparison Statistics for Iteration #1
No. ∆N Unit (M) 1. Minimum 0.797 2. Maximum 2.214 3. Mean 1.311 4. Standard Deviation 0.136
Figure 4.19: ∆N Variation
99 100 101 102 103 104 1051
2
3
4
5
6
7
8
540
1122
1729
1779
1806
2079
2176
2547
25632599
2659
30383139
32333245
3365
85
170
356
793 855
873898
10131305
13281341
1501
1707
1819
1847
2039
2638
82208
1415
68
100
117
127
128
146
170
190
198
200
221
252253
267
296
313
357
377
379
415
491
501
898
992
1013
1142
1220
1247
1401
1775
2392
2985
3571
4901
368
427
414
678
699
1011
1364
1383
1430
1667
288530413173
3187
3203
3218
3276
3547
3608
3655
3741
3821
3904
547
1615
1015
603
784828
1567
1585
2329
246
417
17
25
47
48
50
54
61
65
70
83
87
91
102
108
118
130
147
154
168
177
180
199
201202
209
220
276
310
311
317
335
337
341
346
355
372
393
413
416417
424
431
461
475
483
487
496
500
10081014
1023
1053
1082
1150
1151
1155
1160
1165
0.800.850.900.951.001.051.101.151.201.251.301.351.401.451.501.551.601.65

75
To fit the gravimetric geoid to GPS levelling, a least-squares collocation
method was used, using as common trend parameter with a single bias. For the final
fit, a number of different collocation parameters σ (standard deviation of GPS
levelling) of 0.030 m and correlation length of 2nd order Markov covariance function
of 50 km is being used.
For the final computation, thirty (30) points have been excluded from the
process, and the results show an improvement with the corrector surface being well
distributed (Figure 4.20). The corrector surface range is between 1.25 – 1.38 meter
with the formal standard error is 0.039 m in the least square collocation adjustment.
Figure 4.20: Corrector Surface plotted from Iteration-21 results
99 100 101 102 103 104 1051
2
3
4
5
6
7
8
1779
1806
2079
2176
2547
25632599
2659
32333245
170
356
855
873
10131305
13281341
1707
1819
1847
2039
2638
82208
1415
68
100
117
127
128
146
170
190
198
200
221
253267
313
357
377
379
415
501
898
992
1220
1247
1401
1775
2392
4901
427
414
699
1364
1383
1430
1667
288530413173
3187
3203
3218
3276
3547
3608
3655
3821
3904
1615
1015
603
784828
1567
1585
2329
246
417
17
25
47
48
50
54
61
65
70
87
91
102
108
118
130
147
168
177
180
199
201
209
220
310
311
317
335
337
341
355
372
393
413
416417
424
431
461483
487
496
500
10081014
1023
1082
1150
1151
1155
1165
1.25
1.26
1.27
1.28
1.29
1.3
1.31
1.32
1.33
1.34
1.35
1.36
1.37

76
4.4.6 Analyses of WMGeoid06A Fitted Geoid
For the evaluation of WMGeoid06A quality, 131 SBM/BM that were used
for the surface fitting process were compared with the WMGeoid06A model.
Table 4.18: LSC Fitting Statistics Table 4.18, shows the statistics of LSC with the standard error of the fitting is
slightly larger than statistic of WMG04A with 0.039 meter. The value is an indicator
for the internal quality assessment of WMGeoid06A model. To have more realistic
quality assessment, a comparison with external data will be performed.
4.4.6.1 Comparison with External Data Sets
Data sets of DS-1, DS-2 and DS-3 from Para 4.3.4.1 has been used to
determine the accuracy of WMGeoid06A. For this purpose, all three (3) data sets
are being combined into a single file with a single run of geoid interpolation
program.
points predicted: 131, skipped points: 0 minimum distance to grid edges for predictions: 147.5 km statistics: mean std.dev. min max unknown original data (pointfile) : -1.145 6.410 -14.330 10.294 0 grid interpolation results: -1.145 6.410 -14.326 10.305 0 predicted values output : 0.000 0.039 -0.173 0.167 0

77
Figure 4.21: Height Difference (Unfiltered)
Figure 4.22: Height Difference Histogram (Unfiltered)
Height Difference
-0.300
-0.200
-0.100
0.000
0.100
0.200
0.300
0.400
A008
5
A012
3
A042
4
A060
0
A072
6
A093
3
A098
3
A139
6
A160
1
A180
2
S009
1
S041
1
J060
J151
J249
J481
J584
J695
J782
J 11
33
J 12
36
J 13
30
J 15
13
S073
J007
7
J048
3
J091
5
J104
6
J134
9
J137
5
J145
0
J152
7
J159
3
J168
5
J171
2
J176
7
J250
7
J312
2
J327
5
Stations
Hei
ght D
iffer
ence
(m)
-0.32 -0.24 -0.16 -0.08 0 0.08 0.16 0.24 0.32
0.00
0.04
0.08
0.12
0.16
Rel
ativ
e Fr
eque
ncy
2 2

78
Figure 4.21 and 4.22 show the height difference (or height residuals)
between derived value using WMGeoid06A and published value. The minimum,
maximum and mean values are tabulated in Table 4.19:
Table 4.19: Height Difference Statistic
No. Component Unit (M) 1. Minimum -0.193 2. Maximum 0.290 3. Mean 0.004 4. RMS 0.075
The height difference range from 0.193 to 0.290 meter, clearly show that
there are outliers in the test data sets. From the histogram plot the height differences
which have exceeded two standard deviation (2σ) is around 13 %. This figure is
similar with outliers detected with WMGeoid04 fitted models. The same figure also
show that 74 % of height difference fall within one standard deviation of 0.075
meter.
Subsequent process is to filter out all suspected outliers. The cut-off of
2σ is used to eliminate the bad data sets.
Table 4.20: Height Difference Statistic (filtered)
No. Component Unit (M) 1. Minimum -0.108 2. Maximum 0.104 3. Mean -0.003 4. RMS 0.050
A total of 15 stations have been excluded in two iterations and the
statistics of filtered data are as in Table 4.20 above and residuals plot as in Figure
4.23. The new RMS value is smaller with 0.050 meter and the mean value is -0.003
meters.

79
Figure 4.23: Height Differences (Filtered) 4.5 Summary
The idea of the Malaysian geoid project (MyGEOID) has been around since
in the mid-90’s. However, due to an anticipated high cost to carry out gravity
survey, the idea only has been realised in the 8th Malaysian Plan. With the
combination of airborne gravity survey which covers the whole country, terrestrial
gravity data and other space borne mission, MyGEOID has been officially launched
in 2005. MyGEOID contains two separate models known as WMGeoid04 for
Peninsular Malaysia and WMGeoid05 for Sabah and Sarawak. The basic underlying
survey and computation work of the Malaysian geoid project was done by the Danish
National Space Center or formerly known as Geodynamics Dept. of the Danish
National Survey and Cadastre (KMS). With the new data, the geoid models are
expected to improve over its earlier models (Kadir et al. 1998).
Height Difference
-0.300
-0.200
-0.100
0.000
0.100
0.200
0.300
A00
85
A01
23
A04
24
A06
00
A07
26
A09
33
A09
83
A13
96
A16
01
A18
02
S00
91
S04
11
J060
J151
J249
J481
J584
J695
J782
J 11
33
J 12
36
J 13
30
J 15
13
S07
3
J007
7
J048
3
J091
5
J104
6
J134
9
J137
5
J145
0
J152
7
J159
3
J168
5
J171
2
J176
7
J250
7
J312
2
J327
5
Stations
Hei
ght D
iffer
ence
(m)

80
The main objective of the Malaysian geoid model (MyGEOID) is to enable to
compute orthometric heights, H that refers to the national geodetic vertical datum
(NGVD). In practice, the expression shows the possibility of using GPS levelling
technique, knowing the geoidal height, N, the orthometric height, H can be
calculated from ellipsoidal height, h. Deriving orthometric height using this
technique with a certain level of accuracy, could replace the conventional spirit
levelling and therefore make the levelling procedures more cheaper and faster.
The existence of vertical datum bias which is the difference between global
mean sea level used during geoid computation and local mean sea level will not
provide satisfactory results. To minimise the vertical datum bias, the gravimetric
geoid has to be fitted to the local mean sea level (NGVD).
The airborne gravity survey in Peninsular Malaysia has been done in
2003 with 5 km spacing. The airborne gravity data system being used is based on the
Danish National Space Center (DNSC)/University of Bergen system. The system is
being based on a differential GPS for positioning, velocity and vertical accelerations,
with the gravity being sensed by a modified marine Lacoste and Romberg
gravimeter. The system has a general accuracy better than 2 mgal at 5 km resolution.
The airborne gravity survey has been flown at different elevations and
subsequently need to be downward continued to the surface, before applying the
Stokes formula gravity to geoid transformation. The downward continuation is being
done by least-squares collocation using the planar logarithmic covariance model,
using all available gravity data in the process. The existing surface gravity data in
Peninsular Malaysia also has strengthened the gravimetric geoid.
The WMGeoid04 is the fitted geoid model which has been computed in
2004, using all available information such as GPS observation on Benchmark and
levelling details. The GPS campaign has been done by DSMM in 2003 and 2004. A
total of 53 stations which have included 39 SBM/BM with the average baseline
length of 70 km have been observed during the GPS campaign. Bernese GPS Post
Processing Software Version 4.2 has been used to process the whole GPS campaign
data for 2004 with a standard processing strategy as employed by DSMM.

81
The WMGeoid06A target is to improve the WMGeoid04 models.
However, with the limitation of data availability the models were only able to cover
the west coasts of Peninsular Malaysia and the whole state of Johor. The new GPS
campaign has been carried out in 2006 with 161 SBM/BM being observed,
including the common points of 2004 GPS campaign. The average baseline length is
25 km which means the network is denser, compared to the previous GPS campaign.
Bernese GPS Post Processing Software Version 5.0 has been used to process the
whole GPS campaign data for 2006 with a standard processing strategy as employed
by DSMM.
The fitting process of WMGeoid04 is using Least Squares Collocation to
bring in the formal RMS error of 0.020 meters. This value is to optimistic when only
37 SBM/BM were being used in the fitting process. For more realistic evaluation of
the models, 3 independent GPS data sets which have been observed in 1997 and
2003 are being used. Out of 115 Benchmarks used for the test, 13 SBM/BM or 11.3
% were rejected. The RMS of height difference is 0.033 meters.
As WMGeoid04 models, the new models also used Least Square
Collocation for the fitting process with a formal RMS error of 0.039 meters. The
value is bigger when compared with the formal error of WMGeoid04. Testing with
three (3) independent GPS data sets, there are about 15 SBM/BM or 13 % were
rejected. The RMS of height difference is 0.050 meters.

82
CHAPTER 5
QUALITY ASSESSMENT OF THE VIRTUAL REFERENCE
STATION AND EVALUATION OF HEIGHT DETERMINATION
WITH GEOID MODELS
5.1 Introduction The MyRTKnet Virtual Reference System services consists real time product
such as Network RTK, Single Base and Differential GPS. Differential GPS service
is available nationwide and Single Base RTK covers the area within 30 km radius
from the reference stations. Currently, Network Base RTK (or dense network),
covers only three major areas namely Klang Valley, Penang and Johor Bahru. By
end of 2006 until mid 2007, the whole of Peninsular Malaysia is expected to be
covered under the Network Base RTK services upon the second phase completion of
the MyRTKnet project.
This chapter will mainly discuss on the quality of coordinates stemmed from
the Network Base RTK of MyRTKnet and the possibility of using it as a tool for
rapid determination of height system in Malaysia. This chapter will also explain in
detail on the test area, the work flow of Network Base RTK, the method and strategy
of the assessment and analysis. The final part of this chapter is the comparison study
on orthometric height determination using Network Base RTK.

83
5.2 The Test Area
Klang Valley and Johor Bahru have been selected as the test area which is
two out of the three areas equipped with Network Base RTK. In Klang Valley,
MASS station’s KTPK is located in DSMM headquarters while in Johor Dense
Network involves MASS station’s UTMJ in Skudai. In addition, four stations from
the 2006 GPS campaign in Kluang and Simpang Renggam have been included in the
test.
5.2.1 MASS and MyRTKnet Networks
Johor Bahru Dense Network (Figure 5.1) consists of four (4) MyRTKnet’s
stations namely TGPG (Tanjung Pengelih), KLUG (Kluang), JHJY (Johor Jaya) and
KUKP (Kukup). The network services are capable of providing RTK correction and
generating virtual Rinex data inside the network as well as 30 km outside the
network triangles. The selected MASS station’s UTMJ is located in the middle of the
dense network and this certainly gives a clear picture of MyRTKnet services
positional quality. There are five (5) reference stations forming the Klang Valley
Dense Network (Figure 5.2) namely as KKBH (Kuala Kubu Bharu), MERU (Meru),
BANT (Banting), UPMS (Universiti Putra) and KLAW (Kuala Klawang). The
network coverage is 100 x 100 km, bigger than the coverage of Johor Bahru Dense
Network.
KTPK and UTMJ are two (2) (out of 18) MASS stations maintained by
DSMM and have been operational since 1999. UTMJ serve the GPS users in the
southern part of Peninsular, whereas KTPK for Klang Valley area. The list of
equipment and configuration for KTPK and UTMJ are listed in Table 5.1.

84
Table 5.1: Equipment List for MASS station
Component KTPK UTMJ GPS Receiver Trimble 4000 SSi Trimble 4000 SSi Antenna Trimble Choke Ring Compact L1/L2 w GP Recording Interval 15 Second 15 Second Recording Format Trimble DAT Trimble DAT Storage Interval Hourly Hourly
Figure 5.1: Location of UTMJ and J. Bahru Dense Network
Figure 5.2: Location of KTPK and Klang Valley Dense Network
102 102.5 103 103.5 104 104.5Longitude (GDM2000)
1.5
2
2.5
3
Latit
ude
(GD
M20
00)
KLUG
KUKP TGPG
JHJYUTMJ
RTK Stations
Mass Station UTMJ
101.1 101.2 101.3 101.4 101.5 101.6 101.7 101.8 101.9 102 102.1
Longitude (GDM2000)
2.9
3
3.1
3.2
3.3
3.4
3.5
Latit
ude
(GD
M20
00)
KKBH
MERU
KLAW
BANT
UPMS
KTPK
RTK Stations
Mass Station KTPK

85
5.2.2 GPS Stations
There are four (4) GPS stations (Standard Benchmark) from the 2006 GPS
campaign selected for this test purposes. The accuracy of the stations is superior,
compared with other GPS stations available in Peninsular Malaysia. Although the
stations distribution is situated outside the dense network, it is still operating inside
the 30 km area. Figure 5.3 shows the location of stations involved with the test.
Figure 5.3: Location of GPS Stations for Test Purposes
5.3 Assessment Method
The assessment utilised the Trimble Total Control (TTC) GPS processing
software and other developed programs which include MyRTKnetStat for Network
RTK positional data quality checking purpose. The real time positional data has
been compared with the published values for stations that which can be observed
with Network RTK technique. For MASS stations, the virtual reference station
RINEX files have been generated for post-process purposes.
102 102.5 103 103.5 104 104.5Longitude (GDM2000)
1.5
2
2.5
3
Latit
ude
(GD
M20
00)
KLUG
KUKP TGPG
JHJY
E0014
E0015
E0146
E1220
RTK Stations
SBM/BM

86
5.3.1 Comparison with MASS Data
Comparisons with MASS stations have been used with 24 hours continuous
GPS data (with intervals of 15 seconds). The process as follows:
i) Generating Virtual Reference Station (VRS) Rinex Data which
coincides with the same MASS data time and date. The virtual station
coordinates have been used to generate virtual Rinex data,
approximately less than 30 meters from the respected actual MASS
station’s coordinates.
ii) Both GPS data have been imported into the TTC project and
subsequently, the Virtual Reference Station’s coordinates were held
fixed.
iii) Data processing on MASS data on epoch-by-epoch basis. The 24
hours GPS data (with 15 seconds intervals) will produce 5760
positions in one (1) day.
iv) Each of the epoch’s wise coordinates then compared with their
respective published value in terms of Latitude, Longitude and
Ellipsoidal Height.
v) Analyses of coordinated time series for 1 day.
5.3.2 Comparison with GPS Stations
Comparison with GPS stations is a straight forward process. The steps are
listed as follows:
i) Carry out Network Base RTK observation on their respective stations
by following the procedures of “Pekeliling Ketua Pengarah Ukur dan
Pemetaan (PKUP)” 9/2005.
ii) Data quality checking for final coordinates utilising MyRTKnetStat
program. Each of the coordinates have been compared with their

87
respective published value in terms of Latitude, Longitude and
Ellipsoidal Height.
iii) Analyses of the coordinate difference.
5.4 Data Processing and Comparison Analyses of MASS Data
GPS data for three (3) days from 27 - 29 August 2006 are being used in the
computations. As stated earlier, the Virtual Reference Station coordinates for KTPK
and UTMJ were approximately less than 30 meter from the original position. The
VRS Rinex generation, sourced from www.rtknet.gov.my using the following
parameters as an input (Table 5.2):
Table 5.2: Input Configuration
No. Parameter KTPK UTMJ 1. Published GDM2000
Coordinates 3° 10’ 15.39787” N 101° 43’ 03.39045” E 99.767 Meters (h)
1° 33’ 56.93325” N 103° 38’ 22.43053” E 80.421 Meters (h)
2. Virtual Station’s GDM2000 Coordinates
3° 10’ 15.00000” N 101° 43’ 03.00000” E 99.000 Meters (h)
1° 33’ 56.00000” N 103° 38’ 22.00000” E 80.000 Meters (h)
3. Rinex Interval 15” 15” 4. Broadcast Ephemeris Yes Yes 5. Day of Year (DoY) 239, 240 and 241 239, 240 and 241
5.4.1 GPS Data Processing and Analyses
As stated earlier, Trimble Total Control (TTC) GPS processing software has
been utilised for data processing purposes. The processing steps are a straight
forward approach, using the default configuration of TTC for Post-Process
Kinematic option. Virtual stations coordinates were held fixed and each of 15
seconds epoch, expected to produce one set of derived kinematic coordinate for

88
KTPK and UTMJ. With a complete 24 hours of observations, 5760 sets of
coordinates can be computed.
The output coordinates of post-process kinematic came with its
position/solution statistics. Statistics from the data processing include the time of
position, the standard deviation for all component (North, East and Height), common
satellite in view and the Position Dilution of Precision (PDOP).
Figure 5.4: Number of Satellites and PDOP for KTPK (Top) and UTMJ (Bottom) on 27th August 2006
Figure 5.4 shows the number of common view satellite and PDOP for KTPK
and UTMJ on 27th August 2006. There are many occasions where the PDOP are
more than 4 for KTPK and UTMJ but in normal circumstances, PDOP less than 7
will gives a satisfactory results (Wellenhof, 1997).
0 2 4 6 8 10 12 14 16 18 20 22 24Time (UTC)
0
2
4
6
8
10
12
# S
ats
0 2 4 6 8 10 12 14 16 18 20 22 24Time (UTC)
1
2
3
4
5
6
7
PDO
P
0 2 4 6 8 10 12 14 16 18 20 22 24Time (UTC)
0
2
4
6
8
10
12
# S
ats
0 2 4 6 8 10 12 14 16 18 20 22 24Time (UTC)
0
2
4
6
PD
OP

89
5.4.1.1 Temporal Variation of Fixed Solution
Temporal variation of fixed solution has been studied to observe the
coordinate behaviors over 24 hours. In the past, there are some variation of accuracy
in time while having fixed solution over a longer periods of time. RTK rover needs
at least five 5 common satellites with its base station to resolve the unknown
ambiguities using on-the-fly technique. In general, increasing number of satellites
produced a better result because of better satellite geometry and redundant satellites
for ambiguity resolution (Wellenhof, 2001). Lowering the cut-off angle may
increase the number of visible satellites but does not always improve the results if
there are surrounding obstacles are present. During the test, the cut-off angle of 13
degrees is being used in order to avoid signal blockage. In Figure 5.5 and 5.6, the
RMS values for the three (3) days coordinates were plotted against the time over 24
hours and overlaid with number of common view satellites for KTPK and UTMJ.
Figure 5.5: RMS (Blue) and Number of Satellites (Red) over three Days for KTPK from 27th – 29th August 2006
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
0.000.020.040.060.080.10
RM
S (m
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
0.000.020.040.060.080.10
RM
S (m
)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
0.00
0.02
0.04
0.06
0.08
0.10
RM
S (m
m)
THREE-DAYS RMS vs NUMBER of SATELLITES VARIATION(KTPK)
024681012
# S
atel
lites
024681012
# S
atel
lites
024681012
# S
atel
lites

90
Figure 5.6: RMS (Blue) and Number of Satellites (Red) over three Days for UTMJ from 27th – 29th August 2006
In general, increasing number of satellites will decreases the RMS of
observations as depicted in Figure 5.5 for MASS station’s KTPK. However, in
Figure 5.6 for MASS station’s UTMJ, there are mixtures of trend, where increasing
the number of satellites will not always decreases the RMS (as shown on the RMS
variation) on 29th August 2006 between 5.5 and 7.5 hours (UTC). Referring to the
same figure, this also includes the changes in number of satellites during the period.
However, there is no clear correlation between satellites and accuracy can be seen.
Investigating further on the fixed solution, the RMS values for coordinates
have been plotted with the Position Dilution of Precision (PDOP), in order to observe
for any impact of satellites geometry on the RMS of the fixed solutions. MASS
station’s KTPK is shown in Figure 5.7, whilst UTMJ in Figure 5.8.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
0.000.020.040.060.080.10
RM
S (m
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
0.000.020.040.060.080.10
RM
S (m
)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
0.00
0.02
0.04
0.06
0.08
0.10
RM
S (m
m)
THREE-DAYS RMS vs NUMBER of SATELLITES VARIATION(UTMJ)
024681012
# Sa
telli
tes
024681012
# S
atel
lites
024681012
# Sa
telli
tes

91
Figure 5.7: RMS (Blue) and PDOP (Red) over three Days for KTPK from 27th – 29th August 2006
Figure 5.8: RMS (Blue) and PDOP (Red) over three Days for UTMJ from 27th – 29th August 2006
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
0.000.020.040.060.080.10
RM
S (m
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
0.000.020.040.060.080.10
RM
S (m
)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
0.00
0.02
0.04
0.06
0.08
0.10
RM
S (m
m)
THREE-DAYS RMS vs PDOP VARIATION(KTPK)
0
2
4
6
8
PD
OP
0
2
4
6
8
PD
OP
0
2
4
6
8
PD
OP
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
0.000.020.040.060.080.10
RM
S (m
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
0.000.020.040.060.080.10
RM
S (m
)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
0.00
0.02
0.04
0.06
0.08
0.10
RM
S (m
m)
THREE-DAYS RMS vs PDOP VARIATION(UTMJ)
0
2
4
6
8
PD
OP
0
2
4
6
8
PD
OP
0
2
4
6
8
PD
OP

92
Figure 5.7 and 5.8 indicate a clear correlation between the accuracy of
coordinates stem from the fixed solution and the satellites geometry. Therefore if a
good result is expected, measurements during poor satellite geometry should be
avoided. However, the variation of the accuracy seems to be within 3 - 4 cm,
accurate enough for surveying and mapping purposes.
5.4.2 Accuracy Assessment of Post-Process Network Based RTK
Comparison analyses of MASS coordinates of KTPK and UTMJ requires
three (3) dimensional coordinate’s differences between the computed (epoch-by-
epoch) against the published value. The difference or the residuals for all three (3)
coordinate components have been plotted in order to analyse the one (1) day
coordinate trend. The second stage of the analysis involves plotting the residuals
histogram to enable observation on the residual’s relative frequency.
The comparison method being used is by differentiating both computed and
published coordinate sets in Earth Centred Earth Fixed (ECEF) system, which will
produce residuals vector of dX, dY and dZ. The vectors are then has been converted
to local geodetic system of dN (Northing), dE (Easting) and dU (Up/Height).
The conversion process from geocentric cartesian vector to local geodetic
plane is using the following formula: -
dN = -Sin(λ).Cos(ψ).dX - Sin(λ).Sin(ψ).dY + Cos(λ).dZ (5.1)
dE = Sin(ψ).dX - Cos(ψ).dY (5.2)
dU = -Cos(λ).Cos(ψ).dX + Cos(λ).Sin(ψ).dY - Sin(λ).dZ (5.3)
The used of geocentric latitude (ψ) can be replaced by the corresponding
station’s geodetic latitude (φ) and will not give any significant changes if the latitude
difference is small (less than 1°@100 km) (Jivall, 1991).

93
Coordinates smoothing have been carried out before the coordinate’s
comparison takes place. The simple smoothing process is by computing the average
of five (5) epochs for each position. The five (5) epochs are the current epoch and
two epochs (each before and after) the current observation. The same technique was
applied in the Real Time Kinematic Survey, but in this smoothing process the
average coordinates is base on the fixed five (5) epochs without any data filtering.
Whereas, in RTK survey, the final coordinates were derived from at least five (5)
cleaned epochs.
5.4.2.1 Horizontal Coordinate Difference
Figure 5.9 to 5.12 shows the coordinates difference (“True Errors”) in latitude
and longitude for three (3) days for MASS station’s KTPK and UTMJ. The shaded
boxes represent the 3 cm coordinates difference in horizontal component.
Figure 5.9: Latitude Difference over three (3) days for KTPK from 27th – 29th August 2006

94
Figure 5.10: Longitude Difference over three (3) days for KTPK from 27th – 29th
August 2006
Figure 5.11: Latitude Difference over three (3) days for UTMJ from 27th – 29th August 2006

95
Figure 5.12: Longitude Difference over three (3) days for KTPK from 27th – 29th
August 2006
As can be seen in above figure, generally the MASS station’s KTPK shows a
good agreement in coordinates difference in latitude and longitude, compared to
UTMJ. In northing (latitude) component, the RMS of difference (RMS of residuals)
for the three (3) days is 0.015, 0.012 and 0.015 m respectively, which is a clear
presentation of achievable accuracy of VRS. There are three (3) occasions on 27th at
17.5 hours (1:30 am on 28th MST), on 28th at 7 hours (3:00 pm MST) and on 29th
between 07 and 09.5 hours (3:00 to 5:30 pm MST), where the coordinates difference
are more than 3 cm. Further investigation shown, that the high residuals are highly
correlated to high RMS value in fixed solution (Figure 5.7) and high PDOP. The
RMS of difference in easting component for the three (3) days is 0.017, 0.013 and
0.021 m respectively which are slightly bigger than the northing component. There
are also a high residuals in certain occasions and are correlated to high RMS of fixed
solution.
The results of MASS station’s UTMJ are no better than KTPK. The RMS of
residuals for three days is 0.018, 0.015 and 0.018 for northing component and 0.027,

96
0.026 and 0.024 m for easting component respectively. However, there are trend of
noisy data starting from 4 – 7.5 hours (12:00 – 3:30 pm MST). The noisy data which
is at noon (local time), where the activity of ionosphere is at the highest level.
To confirm that the ionosphere activity has a direct impact on the coordinates
variation, a plot of coordinates variation against I95 ionosphere index activity are
depicted in Figure 5.14 – 5.17. Ionosphere I95 Index (Trimble’s GPSNet User
Guide) reflects the intensity of ionospheric activity, i.e., the expected influences onto
the relative GPS positions. The I95 values are computed from the ionospheric
corrections for all satellites at all network stations for the respective hour. The worst
5% of data are rejected. The highest then remaining value is the I95 index value that
is displayed at the graph.
Figure 5.13: Ionosphere Index on 27th August 2006
Figure 5.13 shows the ionosphere activity in Peninsular Malaysia on 27th
August 2006. As stated in the figure, the normal ionosphere activity has an index of
two (2), that covers during 01:00 hours (8:00 am MST) and between the 20th-24th
hour (3:00 – 7:00 am MST). The ionosphere disturbance started to increase and
peaked at 06:00 hours (01:00 pm MST), which passed the medium disturbance.

97
Figure 5.14 and 5.15 show the coordinates variation in northing and easting
component for KTPK and Figure 5.16 and 5.17 for UTMJ. The figures were
overlaid with the ionosphere activity over 24 hours, in order to see the correlation
between ionosphere activity and the accuracy of post-process VRS.
As expected, during low ionosphere disturbance between the 18th and 24th
hour (02:00 – 08:00 am MST) the coordinates variation in northing and easting have
a good agreement with their respective 24 hour average coordinates. The variation
started to show a wider coordinates dispersion while the ionosphere activity started
to increase towards noon. Based on the visual analysis, users should avoid observing
observation during high ionosphere disturbance if a good result is expected.
Figure 5.14:Three Days Latitude Variation (Blue) and Ionosphere I95 (Red) for KTPK
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
THREE-DAYS COORDINATES VARIATON vs IONOSPHERE ACTIVITY(KTPK)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x

98
Figure 5.15:Three (3) days Longitude Variation (Blue) and Ionosphere I95 (Red) for KTPK
Figure 5.16: Three (3) days Latitude Variation (Blue) and Ionosphere I95 (Red) for UTMJ
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Latit
ude
(m)
THREE-DAYS LATITUDE VARIATION vs IONOSPHERE ACTIVITY VARIATION(UTMJ)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8I 9
5 In
dex
0
2
4
6
8
I 95
Inde
x
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
THREE-DAYS COORDINATES VARIATON vs IONOSPHERE ACTIVITY(KTPK)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x

99
Figure 5.17: Three (3) days Longitude Variation (Blue) and Ionosphere I95 (Red) for UTMJ
To assess the accuracy of VRS, Figure 5.18 – 5.21 visualize the three (3) days
accumulation positional error for KTPK and UTMJ. The positional error for KTPK
in the northing and easting component at 99% confidence level is 34 and 29 mm
respectively, while 31 and 35 mm for UTMJ in northing and easting component.
Figure 5.18: Error in Northing (KTPK) Figure 5.19: Error in Easting (KTPK)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60Error (mm)
0
0.05
0.1
0.15
0.2
0.25
Rel
ativ
e Fr
eque
ncy
(%)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60Error (mm)
0
0.05
0.1
0.15
0.2
0.25
Rel
ativ
e Fr
eque
ncy
(%)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.06-0.04-0.020.000.020.040.06
Diff
eren
t in
Long
itude
(m)
THREE-DAYS LONGITUDE VARIATION vs IONOSPHERE ACTIVITY VARIATION(UTMJ)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x

100
Figure 5.20: Error in Northing (UTMJ) Figure 5.21: Error in Easting (UTMJ)
Statistical summary for the two 2 stations were at 95% and 99%, listed in
Table 5.3. From these results, the achievable accuracy of Network Based RTK
(VRS) is better than 3 cm (2σ) horizontally. These results have proven that Network
Based RTK can provide user with centimetre level of accuracy, for survey and
mapping purposes in Malaysia.
Table 5.3: Statistical Summary for Horizontal Component
Station Component Confidence Level
95% 99%
KTPK Northing Easting
26.1 mm 21.8 mm
34.3 mm 28.7 mm
UTMJ Northing Easting
24.3 mm 26.8 mm
31.9 mm 35.3 mm
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60Error (mm)
0
0.05
0.1
0.15
0.2
0.25
Rel
ativ
e Fr
eque
ncy
(%)
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40Error (mm)
0
0.05
0.1
0.15
0.2
0.25
Rel
ativ
e Fr
eque
ncy
(%)

101
5.4.2.2 Vertical Coordinate Difference
Analyses of vertical coordinates have been carried in same manner as the
horizontal coordinates. Figure 5.23 and 5.24 show the height variation (plotted
together with PDOP) for KTPK and UTMJ. From the figures, there are high
correlation between PDOP and the height variation. Similar trend can be observed in
horizontal coordinates variation, but the impact on height is much bigger that can
reach up to 25 cm.
Figure 5.23: Three (3) days Height Variation (Blue) and
PDOP (Red) for KTPK
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght.
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
THREE-DAYS HEIGHT DIFFERENCE VARIATION(KTPK)
0
2
4
6
8
PDO
P
0
2
4
6
8
PD
OP
0
2
4
6
8
PDO
P

102
Figure 5.24: Three (3) days Height Variation (Blue) and
I95 Index (Red) for KTPK
Analyses on ionospheric disturbance as can be seen in Figure 5.25 and 5.26
for KTPK and UTMJ respectively. Both indicate that the activity does has its
influence on the height variation. Similar to their respective horizontal coordinates
variation, such as during low ionosphere disturbance between 18th and 24th hour
(02:00 – 08:00 am, MST) the height variation has a good agreement with their
respective 24 hours average height. A large height dispersion can be observed where
the ionosphere activity started to increase towards noon.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
THREE-DAYS COORDINATES VARIATON vs IONOSPHERE ACTIVITY(KTPK)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x

103
Figure 5.25: Three (3) days Height Variation (Blue) and
PDOP (Red) for UTMJ
Figure 5.26: Three (3) days Height Variation (Blue) and
I95 Index (Red) for UTMJ
Assessments of the three (3) days vertical accuracy for VRS, shown in Figure
5.27 – 5.28 for KTPK and UTMJ. The vertical error for KTPK is 90.2 mm at 99%
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght.
(m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
THREE-DAYS HEIGHT DIFFERENCE VARIATION(UTMJ)
0
2
4
6
8
PD
OP
0
2
4
6
8
PD
OP
0
2
4
6
8
PDO
P
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 29 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 27 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24Time (UTC) 28 August 2006
-0.20-0.15-0.10-0.050.000.050.100.150.20
Diff
eren
t in
Hei
ght (
m)
THREE-DAYS HEIGHT VARIATION vs IONOSPHERE ACTIVITY VARIATION(UTMJ)
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x
0
2
4
6
8
I 95
Inde
x

104
confidence level and 86.9 mm for UTMJ. As expected, the vertical error is higher
(to the factor of 2 – 3) when being compared to the horizontal coordinates accuracy.
Statistical summary for the two stations at 95% and 99% confidence level are listed
in Table 5.4. From these results, the achievable vertical accuracy of Network Based
RTK (VRS) is between 1- 6 cm. These results can be improved if more reference
stations are available to provide corrections for the VRS.
Table 5.4: Statistical Summary for Vertical Component
Station Component Confidence Level
95% 99% KTPK Vertical 64.7 mm 90.2 mm UTMJ Vertical 65.5 mm 86.9 mm
Figure 5.27: Vertical Error (KTPK) Figure 5.28: Vertical Error (UTMJ)
-160 -80 0 80 160Error (mm)
0
0.04
0.08
0.12
0.16
Rel
ativ
e Fr
eque
ncy
(%)
-200 -160 -120 -80 -40 0 40 80 120 160 200Error (mm)
0
0.04
0.08
0.12
0.16
0.2
Rel
ativ
e Fr
eque
ncy
(%)

105
5.5 Assessment of Network Based Real-Time Survey
5.5.1 Field Observation
Assessment of real time positioning accuracy using Network Based RTK was
using four (4) GPS stations (as in Figure 5.3). Although all the four (4) stations are
located outside the network triangle, it is still inside the 30 km coverage. The
achievable accuracy of real time positioning inside and outside the network is
comparable (Hakli, 2004), even though the correction outside the network is
extrapolated. The test stations observation has been done with nine (9)
initialisations, each recording ten epochs. The data logger configuration has been
setup with every epoch consists of at least five observations (5 second with 1 second
data interval). The test has been done on 27th September 2006, with a favourable
condition (except station E0146, where heavy downpour occurred for the whole day
in that area).
5.5.2 Results and Analyses The Network Based RTK real time survey accuracy assessment is similar to
the assessment of MASS stations. The positions of each epoch have been compared
to their respective published value in 3-Dimensional coordinates system (NEU), and
this will be the measure of achievable accuracy (“True Error”). Figure 5.29 to 5.32
visualised the coordinates difference for E0014, E0015, E0146 and E1220
respectively. In general, the horizontal coordinates difference falls within 3 cm of its
actual value (published) and 5 cm for the vertical component except for E0146. The
RMS of difference (RMS of Residuals) for all stations is tabulated in Table 5.5.
Looking at the coordinates difference of E0146 in Figure 5.29, the
coordinates variation is almost double, compared to the other stations. As stated
earlier, the weather condition at the stations was not favourable during the
observation, with heavy downpour occurred for the whole days. The obvious
differences in weather condition (between the observation site and the reference

106
stations) will lead to the wrong estimation and correction of zenith total delay (ZTD)
for the observed station. Any wrong estimation of ZTD will directly affect the
vertical component and this can be seen where the height difference of 20 cm has
been recorded at the station. Based on the observation result of E0146, an
observation in unfavourable weather condition should be avoided if a good result is
expected.
Table 5.5: Statistics of VRS Observation
Station RMS of Residuals
Northing Easting Up E0014 19 mm 17 mm 11 mm E0015 13 mm 5 mm 45 mm E0146 46 mm 20 mm 55 mm E1220 9 mm 18 mm 41 mm
Figure 5.29:3-Dimensional Coordinates Difference for E0014
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Latit
ude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Long
itude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Hei
ght (
m)

107
Figure 5.30:3-Dimensional Coordinates Difference for E0015
Figure 5.31:3-Dimensional Coordinates Difference for E0146
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Latit
ude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Long
itude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Hei
ght (
m)
0 10 20 30 40 50 60 70 80 90Index of Position
0.000.010.020.030.040.050.060.070.08
Diff
eren
t in
Latit
ude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.020.000.020.040.060.08
Diff
eren
t in
Long
itude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.20-0.16-0.12-0.08-0.040.000.040.080.120.160.20
Diff
eren
t in
Hei
ght (
m)

108
Figure 5.32:3-Dimensional Coordinates Difference for E1220
Accuracy measurements of the Network Based VRS are computed based on
the observation of three (3) stations. E0146 was excluded, due to large uncertainties
affected by the weather condition. Figure 5.33 – 5.35 show the error histograms for
each of the 3-Dimensional coordinate’s component. The error distributions were
mixed and do not have good agreement with Gaussian normal distribution. However,
with a limited data (270 sets) accumulated from three stations, the result does
represent the achievable accuracy of a real time VRS.
Based on the normal distribution of the errors, the horizontal accuracy of real
time VRS is 36.6, 29.9 and 51.0 mm for the northing, easting and height component
respectively (each at 99% confidence level). The horizontal accuracy is comparable
to the post-process horizontal accuracy, which is better than 3cm. However, for the
vertical accuracy, a better choice would be a real time VRS. The statistical summary
for the real time VRS at 95% and a confidence level of 99% are tabulated in Table
5.6.
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.02
00.020.040.060.08
Diff
eren
t in
Latit
ude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.02
00.020.040.060.08
Diff
eren
t in
Long
itude
(m)
0 10 20 30 40 50 60 70 80 90Index of Position
-0.08-0.06-0.04-0.02
00.020.040.060.08
Diff
eren
t in
Hei
ght (
m)

109
Table 5.6: Statistical Summary
No. Component Confidence Level
95% 99% 1. Latitude 27.8 mm 36.6 mm 2. Longitude 22.7 mm 29.9 mm 3. Height 38.8 mm 51.0 mm
Figure 5.33: Coordinate Error in Northing Component
Figure 5.34: Coordinate Error in Easting Component
-50 -40 -30 -20 -10 0 10 20 30 40 50Error (mm)
0
0.02
0.04
0.06
0.08
0.1
Rel
ativ
e Fr
eque
ncy
-50 -40 -30 -20 -10 0 10 20 30 40 50Error (mm)
0
0.02
0.04
0.06
0.08
0.1
Rel
ativ
e Fr
eque
ncy

110
Figure 5.35: Coordinate Error in Vertical Component
5.6 Test and Evaluation
5.6.1 Method and Test Area
There are three (3) areas selected in testing the achievable accuracy of height
determination using VRS and precise geoid model WMGeoid04 and WMGeoid06A.
The areas are the same four benchmark sites in Johor that have been used to assess
the ellipsoidal height accuracy, ten (10) benchmark site in Putra Jaya and 12
benchmark site in Kuala Lumpur and its surrounding area. The Mean Sea Level
(MSL) values of the respective benchmarks have been determined either by using a
precise levelling technique or 2nd class levelling survey. The tests have been
performed in a straight-forward approach by comparing the published MSL value
against the derived orthometric height (H) from VRS and geoid models.
The consistency of 3-D coordinates derived from VRS has been checked
using MyRTKnetStat program, developed by the author. The program read the raw
-40 -20 0 20 40 60 80 100Error (mm)
0
0.02
0.04
0.06
0.08
0.1
Rel
ativ
e Fr
eque
ncy

111
data of observation file from data logger (*DC File) and then compute the final
average coordinates including its respective standard deviation. For analysis and
data snooping purposes, observations residuals were also computed and displayed.
Figure 5.36: MyRTKnetStat Program Example
5.6.2 Comparison Analyses A straight-forward comparison analysis has been done by comparing the
derived orthometric height using VRS and geoid models with its published MSL
value. Table 5.7 to 5.9 tabulated the comparison statistics for the three (3) test areas.

112
Table 5.7: Orthometric Height Difference (Kuala Lumpur)
Station Ell. Hgt N2004 N2006A H2004 +
VRS H2006A +
VRS HLev. δH2004 δH2006A
B0028 51.565 -2.004 -1.972 53.569 53.537 53.516 0.053 0.021
B0029 59.785 -1.960 -1.928 61.745 61.713 61.686 0.059 0.027
B0515 52.605 -1.650 -1.633 54.255 54.238 54.217 0.038 0.021
B0516 55.559 -1.582 -1.569 57.141 57.128 57.137 0.004 -0.009
B1475 107.179 -2.303 -2.244 109.482 109.423 109.517 -0.035 -0.094
B1807 142.708 -1.731 -1.711 144.439 144.419 144.460 -0.022 -0.041
B1808 106.204 -1.732 -1.711 107.936 107.915 108.007 -0.071 -0.092
B1809 62.344 -1.709 -1.689 64.053 64.033 64.010 0.043 0.023
B1810 49.437 -1.678 -1.659 51.115 51.096 51.106 0.008 -0.011
B1811 57.891 -1.614 -1.600 59.505 59.491 59.490 0.015 0.001
B1813 64.077 -1.519 -1.509 65.596 65.586 65.633 -0.037 -0.047
W0534 34.546 -2.193 -2.149 36.739 36.695 36.732 0.006 -0.038
RMS 0.039 0.046
Table 5.8: Orthometric Height Difference (Johor)
Station Ell. Hgt N2004 N2006A H2004 +
VRS H2006A +
VRS HLev. δH2004 δH2006A
E0014 27.870 6.180 6.164 21.690 21.706 21.664 0.026 0.042
E0015 13.503 5.497 5.474 8.006 8.029 8.071 -0.065 -0.042
E0146 37.971 6.045 6.058 31.926 31.913 31.932 -0.006 -0.019
E1220 16.850 4.949 4.932 11.901 11.918 11.895 0.006 0.023
RMS 0.035 0.033
Table 5.7 and 5.8 show the height difference, derived using Network Based
real-time technique and the two (2) geoid models. Mean Sea Level (MSL) height for
12 benchmark site in Kuala Lumpur and its surrounding area, including four (4)
benchmarks (eccentricity) in Johor, have been determined using precise levelling
technique. Field observation in Kuala Lumpur has been executed between 12 -15
September 2006, while observation in Johor done during August 2006.
From the same figures, the RMS of height difference, derived using both
geoid models are better than 5 cm, which is comparable (or better than) the tests
done using static GPS observations (refer Chapter 4). With the VRS technique
observation time is less than 5 minutes per stations; it has the edge over the
conventional static observation for height determination with GPS.

113
Table 5.9: Orthometric Height Difference (Putra Jaya)
Station Ell. Hgt N2004 N2006A H2004 +
VRS H2006A +
VRS HLev. δH2004 δH2006A
B2014 65.257 -2.089 -2.045 67.346 67.302 67.274 0.072 0.028
B2016 39.957 -2.125 -2.082 42.082 42.039 42.013 0.069 0.026
B2017 34.952 -2.133 -2.090 37.085 37.042 36.952 0.133 0.090
B2019 48.637 -2.135 -2.092 50.772 50.729 50.601 0.171 0.128
B2022 24.369 -2.122 -2.081 26.491 26.450 26.489 0.002 -0.039
B2032 51.957 -1.942 -1.904 53.899 53.861 53.850 0.049 0.011
B2033 37.617 -2.095 -2.053 39.712 39.670 39.720 -0.008 -0.050
B2036 40.358 -2.005 -1.965 42.363 42.323 42.261 0.102 0.062
B2037 36.585 -1.983 -1.944 38.568 38.529 38.431 0.137 0.098
B2038 38.473 -1.960 -1.922 40.433 40.395 40.338 0.095 0.057
RMS 0.096 0.065
Observation in Putrajaya has been done between 12 and 18 July 2006. A
total of 12 second class levelling benchmarks were observed, using real-time VRS
(with two (2) initialisations for each station). The time taken for each benchmarks is
approximately five (5) minutes in order to complete the observation for both
initialisations.
As in Table 5.9, the RMS of height difference using WMGeoid04 and
WMGeoid06A geoid models is 0.096 (1σ) m and 0.065 (1σ) m respectively. The
RMS values shown that the orthometric height determination with VRS using
WMGeoid06A model is considered better than WMGeoid04. However, the large
RMS values have indicated that the accuracy of published height from 2nd Class
levelling survey is questionable.
Relative comparison analysis has been carried out by selecting extreme
benchmark as a reference for each test area. In order to determine the relative
precision in term of part per million (ppm), the trend fitting through origin has been
used as follow:-
Y = B*X

114
where,
X = Distance in Km
Y = Height Difference in mm
B = Coefficient in term of ppm
Combined plot of height difference against benchmarks distance is shown in
Figure 5.37 and 5.38 for WMGeoid04 and WMgeoid06A models respectively. The
relative precision derived from through origin trend line is 1.03 ppm for
WMGeoid04 geoid models and 0.75 ppm for WMgeoid06A.
0 10 20 30 40Distance (km)
-200
-100
0
100
200
Hei
ght D
iffer
ence
(mm
)
1.03 ppm
Figure 5.37: Relative GPS Levelling Using WMGeoid04
0 10 20 30 40Distance (km)
-200
-100
0
100
200
Hei
ght D
iffer
ence
(mm
)
0.75 ppm
Figure 5.38: Relative GPS Levelling Using WMGeoid06A

115
To assess the relative precision between conventional and GPS levelling, the
following threshold has been used:
Table 5.10: Levelling Specification
No Levelling Type Specification Limits
1 Precise Levelling 0.003 * √K, K in km
2 2nd Class Levelling 0.012 * √K, K in km
3 VRS + WMGeoid04 1.03 ppm
4 VRS + WMGeoid06A 0.75 ppm
Figure 5.39 shows the levelling limits plot for the above levelling
specification. Relative precision for GPS levelling using VRS and fitted geoid
models clearly shows that it’s better than 2nd class levelling. However, precise
levelling is still the most precise technique in determination of height. Even though
the plot depicted, over short distance the GPS levelling is comparable to precise
levelling technique, however, further investigation is needed to confirm the findings
with more data sets. Comparison between WMGeoid04 and WMGeoid06A geoid
models has shown that the latter model is better in term of relative precision.
0 10 20 30 40 50Distance in KM
0.00
0.02
0.04
0.06
0.08
0.10
Hei
ght D
iffer
ence
(m)
2nd Class Levelling
VRS + WMGeoid04
VRS + WMGeoid06A
Precise Levelling
Figure 5.39: Relative Precision Comparison

116
5.7 Summary
Quality assessments for the Virtual Reference Station (VRS) are the main
subject that has been discussed in this chapter. The quality of coordinates observed
with VRS plays a major role in a rapid and accurate determination of orthometric
heights. There are three (3) areas selected for the tests which include Klang Valley,
Johor Bahru, and Simpang Renggam.
The assessment utilised the Trimble Total Control (TTC) GPS processing
software and other programs for quality check on Network RTK positional data. The
real time positional data were compared against the respective published values for
stations that can be observed with Network RTK technique. For the Malaysia Active
GPS Stations (MASS), the virtual reference station RINEX file have been generated
for post-processing purposes. Comparisons with MASS stations are using three 24
hours continuous GPS data, with 15 seconds data interval. A Virtual Reference
Station (VRS) Rinex Data with a same time and date of MASS data have been
generated, with its coordinates approximately less than 30 meters from the respected
MASS station’s coordinates. For data processing, a kinematic mode with epoch-by-
epoch solution has been used. The 24-hours GPS data, each with 15 seconds interval
have produced 5760 positions over a single day. Each of the epochs wise
coordinates have been compared with their respective published value in terms of
Latitude, Longitude and Ellipsoidal Height.
GPS stations comparisons is a straight-forward process, where a GPS
observation with Network Base RTK on the respective stations has been performed
strictly following the procedures of “Pekeliling Ketua Pengarah Ukur dan Pemetaan
(PKUP)” series 9/2005. The data quality check and final coordinates has been
utilising MyRTKnetStat program.
Analysis of post-process VRS also include the temporal variation of fixed
solution, derived from Trimble Total Control (TTC) software. The analyses involved
comparison between Root Mean Square (RMS) of fixed solution and the number of
satellite and RMS against Position Dilution of Precision (PDOP). The results have
shown that the two parameters (number of satellite and PDOP) have a significant role

117
in determining the RMS value. Thus, increasing the number of satellite will
potentially reduce the RMS of Fixed Solution, and lowering the PDOP will also
improve the RMS value.
The post-processing VRS accuracy assessments shown that the horizontal
component is better than three (3) cm (2σ), with 7 cm for the vertical component. An
achievable accuracy analysis also takes into account the impact of ionosphere,
number of satellite and PDOP value.
The assessment of the real-time Network Based RTK has been accomplished
using four (4) stations around Kluang and Simpang Renggam. All the stations,
although located outside the network triangle, still resides inside the 30 km buffer
zone. This will give a similar result if the stations located inside the triangle. One of
the 4 stations has been observed under bad weather condition (heavy rain) and
resulted in a completely unfavourable reading. The achievable accuracy is better
than 3 cm and 4 cm for the horizontal and vertical component respectively, both at
95% confidence region.
To test the possibility using VRS for orthometric height
determination, independent tests has been performed in Kuala Lumpur, Putra Jaya
and Johor. Stations in Johor are the same stations being used for the previous real-
time Network Based RTK. WMGeoid04 and WMGeoid06A geoid models were
used in the test for comparison analysis. Relative precision for GPS levelling using
VRS and fitted geoid models clearly shows that it’s better than 2nd class levelling.
Even though the plot depicted, over short distance the GPS levelling is comparable to
precise levelling technique, however, further investigation is needed to confirm the
findings with more data sets. Comparison between WMGeoid04 and WMGeoid06A
geoid models has shown that the latter model is better in term of relative precision.

118
CHAPTER 6
CONCLUSION AND RECOMMENDATION
6.1 Conclusion
The gravity and GPS projects that have been done by DSMM successfully
computed a gravimetric geoid models and two fitted models known as WMGeoid04
and WMGeoid06A. The computation of the two fitted models was based on two
separate GPS campaign, held in 2004 and 2006. The 2006 GPS campaign is denser
than in 2004 with average baseline length is 25 km. Furthermore, the GPS
observation duration in 2006 is longer, with every station observed on at least 12
hours, contradictory to the 2004 GPS campaign where the observation duration is
between 4 to 9 hours. With the new network configuration, the quality of ellipsoidal
height (h) which is the critical part geoid fitting process is considered more
convincing when compared to the 2004 GPS campaign.
The accuracy assessments of the two fitted geoid models with three
independent data sets shown that WMGeoid04 is better that the latter model.
However, with sparser GPS network of 2004, the quality or accuracy for the
ellipsoidal height is questionable, added with a longer distance between the stations,
will also raise-up the cumulated relative error of precise levelling. Out of 115
Benchmarks used for the test, 13 SBM/BM or 11.3 % were rejected. The RMS of
height difference is 0.033 meters. While, using WMGeoid06A model, 15 SBM/BM
or 13 % were rejected with the RMS of height difference is 0.050 meters. The
accuracy of the ellipsoidal height from 2006 GPS campaign clearly superior
compared to the former GPS campaign in 2004. In addition, the SBM/BM

119
distribution is denser in 2006 campaign. The larger RMS value for WMGeoid06A
test has risen up the question on the accuracy of the gravimetric geoid model itself.
Another possibility of the large RMS value for WMGeoid06A is the
impact of the Sumatran megathrust earthquake in 2004, followed by another
significant earthquake in 2005. With two (2) back-to-back events may deform the
precise levelling network as well as the existing GPS stations in Peninsular Malaysia.
However, the overall quality assessments of the two geoid models have shown that
both are capable of determining the orthometric height less than 5 centimetres
accuracy (1σ), with respect to the National Geodetic Vertical Datum.
The main focus of this study is to perform quality assessments of the Virtual
Reference Station or VRS. The development of accurate Rapid Height
Determination System is based on the achievable accuracy of VRS ellipsoidal height
determination. The accuracy assessments of post-process VRS have shown that in a
single epoch, the horizontal component is better than 3 cm (2σ) and 7 cm for the
vertical component. The analyses of the achieved accuracy have taken into account
the impact of ionosphere, number of satellite and PDOP value.
Assessment of real-time Network Based RTK has shown that observation in
bad weather should be avoided, since will produce inaccurate result. The achievable
accuracy on the real-time survey using Network-Based RTK is better than 3 cm for
the horizontal and 4 cm in vertical component respectively at 95% confidence region.
The results are slightly better than post-process VRS with single epoch. However,
the post-process VRS analysis was based on three set of 24 hours data, without any
filtering.
The test on the possibility of using VRS for orthometric height determination
has been carried out in Kuala Lumpur, Putrajaya and Johor. Stations in Johor are the
same stations being used for the real-time Network Based RTK analysis.
WMGeoid04 and WMGeoid06A geoid models have been used in the test for
comparison analysis. Statistical analysis have shown that there are no significant
differences in interpolated geoid height (N) value between those two models, when
using coordinates from the VRS technique. The RMS of height difference on precise

120
levelling benchmarks for Kuala Lumpur and Johor test areas is better than 4.5 cm
(1σ), comparable to the height determination using static GPS surveying technique.
The test results for Putrajaya area which is on the second class levelling
benchmark provides a larger height difference. Relative precision for GPS levelling
using VRS and fitted geoid models clearly shows that it’s better than 2nd class
levelling, and over short distance the GPS levelling is comparable to precise levelling
technique, however, further investigation is needed to confirm the findings with more
data sets. Comparison between WMGeoid04 and WMGeoid06A geoid models has
shown that the latter model is better in term of relative precision.
With the findings base on statistical analyses of the project, Rapid Height
Determination System has been realised through geoid modelling and the Virtual
Reference Station (VRS) services. With height determination for a single station is
less than 5 minutes, the savings in terms of cost and time are significantly improved
when compared to the conventional GPS levelling technique which require more
than one surveying team to accomplish.
6.2 Recommendation
The two test area for the assessment of fitted geoid model (using numerous
independent data set) are Perak and Johor. However, the accuracy statement is not a
true accuracy representation for the whole Peninsular Malaysia. More comparison in
a different location is required, in order to have a clear picture of the geoid model
quality. It is the same with the Virtual Reference Station (VRS) testing, where it
requires more tests in other areas to determine the true capability of the system.
Comparison between WMGeoid04 and WMGeoid06A fitted geoid models
shown that there is no significant difference, however, larger RMS value in testing of
WMGeoid06A, has risen up a few question. In order to have more accurate results,
the gravimetric geoid model requires improvement by re-computation of the models
with more gravity data. To achieve 1 cm geoid model, gravity data distribution need

121
to be denser ( e.g. 1 km x 1 km grid interval). Furthermore, the impact of the
Sumatran earthquake on vertical component of geodetic infrastructure in Peninsular
Malaysia needs to be monitored and checked. If exist, the co-seismic and post-
seismic motion of the earthquake will deform the vertical component over time.
All the three (3) days ellipsoidal height variation analysis has shown that the
height difference varied in 24 hours and reached 20 cm. This research shows that,
the impact of ionosphere, number of satellite and PDOP have influenced the
coordinates, particularly the height component. More research will be required, such
as using troposphere models in post-process VRS technique and also during
interpolating of the virtual Rinex.
In future, the Network-Based MyRTKnet service coverage will spread
troughout Peninsular Malaysia. The VRS network will soon be clustered, with every
sub- network, each containing six reference stations and added possibility of
overlapping cluster. There is an urgent requirement for more studies on cluster
boundary point accuracy assessment and to find out an optimum number of reference
stations required for interpolation purposes. It will help service provider to maintain
a consistent accuracy throughout the networks, able to cater for the future E-
Kadaster projects as well as other surveying projects in the future.

122
REFERENCES
Altamimi, Z., P. Sillard, and C. Boucher (2002), ITRF2000: A new release of the International Terrestrial Reference Frame for earth science applications, Journal of Geophys. Res., 107(B10), 2214
Blewitt, G. (1989), Carrier phase ambiguity resolution for the global positioning
system applied to geodetic baselines up to 2000 km. Journal of Geophysic Res 94(B8): 10,187–10,203
Dai, L., Han, S. W., Wang, J. L., Rizos, C. (2001), A study on GPS/GLONASS
multiple reference station technique for precise realtime carrier phase-based positioning. Proc 14th Int Tech Meeting Satellite Division Inst Navigation.
Dai, L., Han, S. W., Wang, J. L., Rizos, C. (2003), Comparison of interpolation
algorithms in network-based GPS techniques. Proc Int Tech Meeting Satellite Division Inst Navigation.
Forsberg, R. (1984), Study of Terrain Reduction, Density Anomalies and
Geophysical Inversion Methods inGravity Field Modelling. Reports of the Department of Geodetic Science and Surveying, No. 355, The Ohio State University, Columbus, Ohio, USA.
Forsberg, R. (1987), A New Covariance Model for Inertial Gravimetry and
Gradiometry. Journal of Geophysic. Res., Vol. 92, B2, pp. 1305 – 1310. Forsberg, R. and Sideris, M. G. (1993), Geoid Computation by the Multi-Band
Spherical FFT Approach, Manuscripta Geodaetica, 18, pp 82-90. Forsberg, R. (2000), Some Notes on “Draping” of Geoid to GPS and New
GRAVSOFT Modules, Geoid Note Supplement, IgeS Geoid School, Johor, Malaysia.
Forsberg, R. (2005), Towards a-cm geoid for Malaysia, Paper presented at
Launching of MyRTKnet and MyGeoid, Kuala Lumpur. Fotopoulos, G., Kotsakis, C., and Sideris, M. G. (1999): Evaluation of Geoid
Models and Their Use in Combined GPS/Levelling/Geoid Height Network Adjustments, Department of Geomatics Engineering, The University of Calgary, Alberta, Canada.
Gao, Y. & Li, Z. (1998), Ionosphere effect and modelling for regional area
differential GPS network, 11th Int. Tech. Meeting of the Satellite Div. of the U.S. Institute of Navigation, Nashville, Tennessee.
Golden Software (2001), Grapher Version 3.02 User Manual. Golden Software (2001), Surfer Version 8 User Manual.

123
Heiskanen, W. and Moritz, H. (1966), Physical Geodesy, W.H Freeman and
Company, San Francisco and London. Han, S. and Rizos, C. (1996), GPS network design and error mitigation for real-time
continuous array monitoring systems, 9th Int. Tech. Meeting of the Satellite Div. of the U.S. Institute of Navigation, Kansas City.
Han, S. and Rizos, C. (1998), Instantaneous ambiguity resolution for medium-range
GPS kinematic positioning using multiple reference stations, International Association of Geodesy Symposia, vol. 118.
Hu, G. R., Khoo,H. S., Goh, P. C. & Law, C. L. (2003), Development and
Assessment of GPS Virtual Reference Stations for RTK Positioning, Journal of Geodesy 77: 292 – 302, Springer-Verlag.
Jabatan Ukur dan Pemetaan Malaysia, Seksyen Geodesi (2003). Final Report on
Airborne Gravity Survey and Geoid Determination Project for Peminsular Malaysia, Sabah and Sarawak. Goodwill Synergy Sdn. Bhd., Kuching.
Jabatan Ukur dan Pemetaan Malaysia & University of New South Wales (1995).
Princples of GPS Heighting. GPS Levelling Workshop. 13 – 14 Oktober. Kuala Lumpur.
Jivall, L. (1991), GPS Computations and Analyses for Geodetic Control Networks,
Lantmateriet Rapport 1991:22, Gavle, Sweden. Kamaludin Hj. Omar (1986): The Prediction of Point Free Air Gravity Anomalies
for North-Western Peninsular Malaysia, A Technical Paper, Ohio State University, USA.
Lemoine et. al. (1996): The Development of the NASA GSFCand DMA Joint
Geopotential Model. Proceeding Symposium on Gravity, Geoidand Marine Geodesy, Tokyo.
Majid, A. K., Hasan, F. and Kamaludin, O. (1998): The Malaysian Geoid, The
Surveyor Vol 33-1, Institution of Surveyor,Malaysia. Microsoft Corporation (2000), Microsoft Encarta 2000. Microsearch Inc (1999), Geolab Version 3.9 User Manual
Odijk, D., Marel, H. van der & Song, I. (2000), Precise GPS positioning by
applying ionospheric corrections from an active control network, GPS Solutions, 3(3), 49-57.
Raquet, J., Lachapelle, G. & Fortes, L. (1998), Use of a covariance analysis
technique for predicting performance of regional area differential code and carrier-phase networks, 11th Int. Tech. Meeting of the Satellite Div. of the U.S. Institute of Navigation, Nashville, Tennessee.

124
Raquet, J. & Lachapelle, G. (2001), RTK positioning with multiple reference
stations, GPS World, 12(4), 48-53. Roman, D. R, Wang, Y.M., Henning, W. & Hamilton, J. (2004). Assessment of
the New National Geoid Height Model, GEOID03, 2004 ACSM/TAPS Conference and Technology Exhibition, Nashville, Tennessee, USA.
Samad, A., Chang, L. H. and Soeb, N. (2005), Post Seismic Deformation and Its
Implication to Real Time Positioning Services:Analyses of Coordinates Time Series in Peninsular Malaysia, SEAMERGES FINAL SYMPOSIUM, Bangkok, Thailand.
Tscherning, C.C. (1974), A FORTRAN IV Program for the Determination of the
Anomalous Potential Using Stepwise Least Squares Collocation. Reports of the Department of Geodetic Science No. 212, The Ohio State University, Columbus, Ohio.
Sun, H., Cannon, M. E. and Melgard, T. E. (1999), Real-time GPS reference
network carrier phase ambiguity resolution. Proc Nat Tech Meeting Inst Navigation, San Diego, CA.
Wahlund, S. (2002), Production Measurements with Network RTK: Tests and
analysis. Master’s of Science Thesis,LMV Rapport 2002:2, Gavle, Sweden. Wanninger, L. (1995), Improved ambiguity resolution by regional differential
modelling of the ionosphere, 8th Int. Tech. Meeting of the Satellite Div. of the U.S. Institute of Navigation, Palm Springs, California.
Wellenhof, B. H., Lichtenegger,H. and Collins, J. (1997): GPS Theory and Practice
4th Revised Edition, SpringerWienNewYork. Wellenhof, B. H., Lichtenegger,H. and Collins, J. (2001): GPS Theory and Practice
5th Revised Edition, SpringerWienNewYork. Wübbena, G., Bagge, A., Seeber, G., Böder, V. & Hankemeier, P. (1996),
Reducing distance dependent errors for real-time precise DGPS applications by establishing reference station networks, 9th Int. Tech. Meeting of the Satellite Div. of the U.S. Institute of Navigation, Kansas City, Missouri.
Zilkoski, D. B., Calson, E. E. & Smith, L. S. (2005). Guidelines for Establishing
GPS-Derived Orthometric Heights (Standards: 2 cm and 5 cm) Version 1.4, National Geodetic Survey, Maryland, USA.