Global optimization in the 21st century: Advances and ...kallrath/files/facmk05.pdf · Computers...
18
Computers and Chemical Engineering 29 (2005) 1185–1202 Global optimization in the 21st century: Advances and challenges C.A. Floudas a, ∗ , I.G. Akrotirianakis a , S. Caratzoulas a , C.A. Meyer a , J. Kallrath b,c a Department of Chemical Engineering, Princeton University, Princeton, NJ 08544, USA b BASF-G, Scientific Computing GVC/S-B009, D-67056 Ludwigshafen, Germany c Department of Astronomy, University of Florida, Gainesville, FL 32611, USA Available online 7 April 2005 Abstract This paper presents an overview of the research progress in global optimization during the last 5 years (1998–2003), and a brief account of our recent research contributions. The review part covers the areas of (a) twice continuously differentiable nonlinear optimization, (b) mixed- integer nonlinear optimization, (c) optimization with differential-algebraic models, (d) optimization with grey-box/black-box/nonfactorable models, and (e) bilevel nonlinear optimization. Our research contributions part focuses on (i) improved convex underestimation approaches that include convex envelope results for multilinear functions, convex relaxation results for trigonometric functions, and a piecewise quadratic convex underestimator for twice continuously differentiable functions, and (ii) the recently proposed novel generalized BB framework. Computational studies will illustrate the potential of these advances. © 2005 Elsevier Ltd. All rights reserved. Keywords: Global optimization; Nonlinear optimization; Mixed-integer nonlinear optimization; Differential-algebraic optimization; Optimization with nonfactorable/grey-box models; Bilevel nonlinear optimization; Nonconvexities; Convex envelopes; Convex underestimators; Trilinear monomials; Trigonometric functions; Twice continuously differentiable functions 1. Introduction It is now established that global optimization has ubiqui- tous applications not only in chemical engineering but also across all branches of engineering, applied sciences, and sci- ences (e.g., see the textbook by Floudas (2000a)). As a result, we have experienced significant interest in new theoretical advances, algorithmic and implementation related investi- gations, and their application to important scientific prob- lems. A review paper discussed the advances in determinis- tic global optimization and their applications in the design and control of chemical process systems (Floudas, 2000b).A second review paper presented at the FOCAPD-1999 meet- ing outlined the chemical engineering research contributions in global optimization for the period 1994–1999, presented the advances, and identified research opportunities and chal- lenges (Floudas & Pardalos, 1999). During the last 5 years, 1998–2003, several outstanding textbooks have been pub- ∗ Corresponding author. Tel.: +1 609 258 4595; fax: +1 609 258 0211. E-mail address: [email protected] (C.A. Floudas). lished addressing different facets of global optimization. These include the textbooks by Bard (1998), Floudas (2000a), Horst, Pardalos, and Thoai (2000), Sherali and Adams (1999), Tawarmalani and Sahinidis (2002), Tuy (1998) and Zabinsky (2003). A handbook of test problems in local and global op- timization (Floudas et al., 1999), as well as two edited vol- umes of the research contributions presented at the major conferences on global optimization held in 1999 and 2003 (Floudas and Pardalos, 1999, 2003) were published. A re- cent survey paper by Neumaier (2004) discusses constrained global optimization and continuous constraint satisfaction problems with a particular emphasis on the use of interval arithmetic for addressing rounding off errors and reliability issues. Global optimization addresses the computation and char- acterization of global optima (i.e., minima and maxima) of nonconvex functions constrained in a specified domain. Given an objective function f that is to be minimized and a set of equality and inequality constraints S, Determinis- tic Global Optimization focuses on the following important issues : 0098-1354/$ – see front matter © 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.compchemeng.2005.02.006
Transcript of Global optimization in the 21st century: Advances and ...kallrath/files/facmk05.pdf · Computers...

Computers and Chemical Engineering 29 (2005) 1185–1202
Global optimization in the 21st century: Advances and challenges
C.A. Floudasa,∗, I.G. Akrotirianakisa, S. Caratzoulasa, C.A. Meyera, J. Kallrathb,c
a Department of Chemical Engineering, Princeton University, Princeton, NJ 08544, USAb BASF-G, Scientific Computing GVC/S-B009, D-67056 Ludwigshafen, Germanyc Department of Astronomy, University of Florida, Gainesville, FL 32611, USA
Available online 7 April 2005
Abstract
This paper presents an overview of the research progress in global optimization during the last 5 years (1998–2003), and a brief account ofour recent research contributions. The review part covers the areas of (a) twice continuously differentiable nonlinear optimization, (b) mixed-integer nonlinear optimization, (c) optimization with differential-algebraic models, (d) optimization with grey-box/black-box/nonfactorablemodels, and (e) bilevel nonlinear optimization. Our research contributions part focuses on (i) improved convex underestimation approachesthat include convex envelope results for multilinear functions, convex relaxation results for trigonometric functions, and a piecewise quadraticconvex underestimator for twice continuously differentiable functions, and (ii) the recently proposed novel generalizedBB framework.C©
KnT
1
taewagltasiitl1
ion.))
op-l-
ajor003-edtionrval
ility
char-a)ain.d
nt
0d
omputational studies will illustrate the potential of these advances.2005 Elsevier Ltd. All rights reserved.
eywords:Global optimization; Nonlinear optimization; Mixed-integer nonlinear optimization; Differential-algebraic optimization; Optimization withonfactorable/grey-box models; Bilevel nonlinear optimization; Nonconvexities; Convex envelopes; Convex underestimators;rilinear monomials; Trigonometric functions; Twice continuously differentiable functions
. Introduction
It is now established that global optimization has ubiqui-ous applications not only in chemical engineering but alsocross all branches of engineering, applied sciences, and sci-nces (e.g., see the textbook byFloudas (2000a)). As a result,e have experienced significant interest in new theoreticaldvances, algorithmic and implementation related investi-ations, and their application to important scientific prob-
ems. A review paper discussed the advances in determinis-ic global optimization and their applications in the designnd control of chemical process systems(Floudas, 2000b). Aecond review paper presented at the FOCAPD-1999 meet-ng outlined the chemical engineering research contributionsn global optimization for the period 1994–1999, presentedhe advances, and identified research opportunities and chal-enges(Floudas & Pardalos, 1999). During the last 5 years,998–2003, several outstanding textbooks have been pub-
∗ Corresponding author. Tel.: +1 609 258 4595; fax: +1 609 258 0211.E-mail address:[email protected] (C.A. Floudas).
lished addressing different facets of global optimizatThese include the textbooks byBard (1998),Floudas (2000a,Horst, Pardalos, and Thoai (2000),Sherali and Adams (1999,Tawarmalani and Sahinidis (2002), Tuy (1998)andZabinsky(2003). A handbook of test problems in local and globaltimization (Floudas et al., 1999), as well as two edited voumes of the research contributions presented at the mconferences on global optimization held in 1999 and 2(Floudas and Pardalos, 1999, 2003)were published. A recent survey paper byNeumaier (2004)discusses constrainglobal optimization and continuous constraint satisfacproblems with a particular emphasis on the use of intearithmetic for addressing rounding off errors and reliabissues.
Global optimization addresses the computation andacterization of global optima (i.e., minima and maximof nonconvex functions constrained in a specified domGiven an objective functionf that is to be minimized ana set of equality and inequality constraintsS, Determinis-tic Global Optimizationfocuses on the following importaissues :
098-1354/$ – see front matter © 2005 Elsevier Ltd. All rights reserved.oi:10.1016/j.compchemeng.2005.02.006

1186 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
(a) determine a global minimum of the objective functionf(i.e., f has the lowest possible value inS) subject to theset of constraintsS;
(b) determinelower andupper boundson the global mini-mum of the objective functionf onSthat are valid for thewhole feasible regionS;
(c) determine an ensemble of qood quality local solutions inthe vicinity of the global solution;
(d) enclose all solutions of the set of equality and inequalityconstraintsS;
(e) prove that a constrained nonlinear problem is feasible orinfeasible.
In this review paper, we will discuss the deterministicglobal optimization advances during the last 5 years forthe following classes of mathematical problems: (i) twicecontinuously differentiable nonlinear optimization, NLPs,(ii) mixed-integer nonlinear optimization, MINLPs, (iii)differential-algebraic systems, DAEs, (iv) grey-box andnonfactorable problems, and (v) bilevel nonlinear andmixed integer optimization. We will first present all thecontributions in the aforementioned classes, and we will sub-sequently focus on a few advances from Princeton Universityon (a) convex envelope results for trilinear monomials, (b)convex relaxation results for trigonometric functions, (c)new convex underestimators based on piecewise convexqg
2
cesi wills ncesf ndm and(
2
H wr sf (ii)n heye ,a n-t iesi r net-w underu
xe e,cG ite
relaxation ofx/y, and suggested convex envelopes for func-tions of the formf (x)y2 andf(x)/y.Ryoo and Sahinidis (2001)studied the bounds for multilinear functions via arithmeticintervals, recursive arithmetic intervals, logarithmic transfor-mation, and exponential transformation, and provided com-parisons of the resulting convex relaxations.Tawarmalani,Ahmed, and Sahinidis (2002a)showed that tighter linear pro-gramming relaxations are produced if the product of a con-tinuous variable and the sum of several continuous variablesis disaggregated, and applied it to the instance of rationalprograms that include a nuclear reactor reload pattern de-sign, and a catalyst mixing in a packed bed reactor problem.Tawarmalani and Sahinidis (2002)introduced the convex ex-tensions for lower semi-continuous functions, studied condi-tions under which they exist, proposed a technique for con-structing convex envelopes for nonlinear functions, and stud-ied the maximum separation distance for functions such asx/y. Tawarmalani, Ahmed, and Sahinidis (2002b)studied 0–1hyperbolic programs, developed eight mixed-integer convexreformulations, proposed analytical results on the tightnessof these reformulations, developed a global optimization al-gorithm and applied it to ap-choice facility location problem.
Liberti and Pantelides (2003)proposed a nonlinear con-tinuous and differentiable convex envelope for monomialsof odd degree, derived its linear relaxation, and comparedto other relaxation.Bjork, Lindberg, and Westerlund (2003)s cedp ffecto workp
lsw res-s lopesa osedr rith-m ite lopeso( lopeo asedo tionsf
-v ichaF res-t iedt con-va un-du tion,d nder-e ssical iza-t
uadratic representations, and (d) the generalizedBBlobal optimization approach.
. Twice continuously differentiable NLPs
In the first part of this section, we will review the advann convex envelopes and convexification techniques. Weubsequently focus on theoretical and algorithmic advaor (a) generalC2 NLPs, (b) concave, bilinear, fractional, aultiplicative problems, (c) phase equilibrium problems,
d) parameter estimation problems.
.1. Convexification techniques and convex envelopes
Adjiman, Dallwig, Floudas, and Neumaier (1998a)andertz, Adjiman, and Floudas (1999)proposed several ne
igorous methods for the calculation of theα parameteror (i) uniform diagonal shift of the Hessian matrix andonuniform diagonal shift of the Hessian matrix, and tstablished their potential trade-offs.Adjiman, Androulakisnd Floudas (1998b)presented the detailed impleme
ation of the BB approach and computational studn process design problems such as heat exchangeorks, reactor–separator networks, and batch designncertainty.
Tawarmalani and Sahinidis (2001)developed the convenvelope and concave envelope forx/yover a unit hypercubompared it to the convex relaxation proposed byZamora androssmann (1998a, 1998b, 1999), proposed a semidefin
tudied convexifications for signomial terms, introduroperties of power convex functions, compared the ef the convexification schemes for heat exchanger netroblems, and studied quasi-convex convexifications.
Meyer and Floudas (2003)studied trilinear monomiaith positive or negative domains, derived explicit expions for the facets of the convex and concave envend showed that these outperform the previously propelaxations based on arithmetic intervals or recursive aetic intervals.Meyer and Floudas (2004)presented explic
xpressions for the facets of convex and concave envef trilinear monomials with mixed-sign domains.Tardella2003)studied the class of functions whose convex enven a polyhedron coincides with the convex envelope bn the polyhedron vertices, and proved important condi
or a vertex polyhedral convex envelope.Caratzoulas and Floudas (2005)proposed novel con
ex underestimators for trigonometric functions whre trigonometric functions themselves.Akrotirianakis andloudas (2005)introduced a new class of convex unde
imators for twice continuously differentiable NLPs, studheir theoretical properties, and proved that the resultingex relaxation is improved compared to theBB one.Meyernd Floudas (2004)proposed two new classes of convexerestimators for generalC2 NLPs which combine theBBnderestimators within a piecewise quadratic perturbaerived properties for the smoothness of the convex ustimators, and showed the improvements over the claBB convex underestimators for box-constrained optim
ion problems.

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1187
2.2. GeneralC2 NLPs
Adjiman et al. (1998a, 1998b)introduced theBB globaloptimization approach, which is applicable to general twice-continuously differentiable NLPs, and presented extensivecomputational studies in process design problems such asheat exchanger networks, reactor–separator networks, andbatch design under uncertainty.Yamada and Hara (1998)proposed a global optimization approach based on the tri-angle covering for H-infinity control with constant diagonalscaling.Androulakis et al. (1998)studied the parallel com-putation issues that arise using theBB global optimizationapproach.
Klepeis, Androulakis, Ierapetritou, and Floudas(1998)and Klepeis and Floudas (1999a)proposed newglobal optimization approaches for the structure predictionof solvated peptides using area and volume accessible tothe solvent models. A review of the global optimizationactivities in the areas of protein folding and peptide dockingcan be found inFloudas, Klepeis, and Pardalos (1999b).Klepeis and Floudas (1999b)proposed a novel deterministicglobal optimization approach for free energy calculations ofpeptides.Westerberg and Floudas (1999a, 1999b)introduceda global optimization framework for the enclosure of alltransition states of potential energy hypersurfaces, and stud-ied the reaction pathways and dynamics of helical formationw ,a atc nala singa
edl eres-t theo-r P isma e-m hes,i piv-o ersem lts ina ce ins rr( anda onalt tingi ears andpi a dif-f tiono ndt andi onale riums qua-
tion, and a CSTR equation.Klepeis, Schafroth, Westerberg,and Floudas (2002)presented the advances in deterministicglobal optimization based on theBB approach and its ap-plications for structure prediction of oligopeptides, dynamicsof helical formation, and protein–peptide interactions.
Zilinskas and Bogle (2003)studied the evaluation ofranges of functions through balanced random interval arith-metic, investigated the hypothesis on the normal distributionof the centers and radii of the evaluated balanced random in-tervals through several computational studies, and concludedthat this hypothesis is incorrect.Klepeis and Floudas (2003a)introduced a deterministic global optimization approach,BB, coupled with torsional angle dynamics for the pro-tein structure prediction given restraints predicted from theidentification ofα-helices andβ-sheets.Klepeis and Floudas(2003b)proposed the first principles framework, Astro-Fold,for the protein structure prediction, described the global opti-mization and mixed-integer optimization advances, and pre-sented a variety of test systems including several blind proteinpredictions.Klepeis, Pieja, and Floudas (2003a)introduceda new class of hybrid global optimization methods denotedas integrated hybrids for the oligopeptide structure predic-tion. Klepeis, Pieja, and Floudas (2003b)proposed new al-ternating hybrid global optimization methods, studied anddeveloped their distributed computing algorithms, and ap-plied them to the structure prediction of met-enkaphalin andm ap-p sl fortt andi ges,s otopyc ness,a , ret-r
ei tic-l ludet to thes ortede
a-t torse ox-c obalo ages uta-t
2m
r-m cesss inear
ith and without solvation.Klepeis, Floudas, Morikisnd Lambris (1999)introduced a novel approach thombines deterministic global optimization and torsiongle dynamics for the prediction of peptide structures usparse set of NMR data.Byrne and Bogle (1999)introduced a bound constrain
inear relaxation, developed two classes of linear undimators using the natural extension and mean valueems of interval analysis, and showed that the interval Lore efficient than other interval analysis approaches.Gaund Stadtherr (2002c)studied the computational improvent of interval Newton/generalized bisection approac
ntroduced a hybrid preconditioning strategy where ating preconditioner is combined with the standard invidpoint method, and showed that this approach resularge reduction of the needed subintervals and hen
ignificant computational improvements.Gau and Stadthe2002b)studied synchronous work stealing, synchronoussynchronous diffusive load balancing on a two-dimensi
orus virtual network, developed a distributed compunterval Newton framework, and showed that superlinpeedups can be obtained for vapor–liquid equilibriumarameter estimation problems.Lucia and Feng (2002)stud-
ed the least squares function landscape, introducederential geometry based framework for the determinaf all physically meaningful solutions, singular points, a
heir connectivity, developed a global terrain algorithm,llustrated the framework through one and two-dimensixamples from glass temperature calculations, equilibtates in nanostructured materials, a simplified SAFT e
ellitin. These two classes of hybrid global optimizationroaches combine theBB for the generation of rigorou
ower bounds with the modified genetic algorithm, CSA,he upper bounding calculations.Lucia and Feng (2003)ex-ended the terrain methodology to multivariable problemsntegral curve bifurcations associated with valleys and ridhowed that the terrain methods are superior to arc homontinuation in the presence of parametric disconnectednd studied examples for the location of all azeotropesograde flash calculations, and CSTR problems.
Schafroth and Floudas (2004)studied the protein–peptidnteractions via deterministic global optimization, atomisevel modelling, and several solvation methods that inche area accessible to the solvent, the volume accessibleolvent, and the Poisson–Boltzmann method, and repxcellent agreement on the binding motifs.
Akrotirianakis and Floudas (2004)presented computional results of the new class of convex underestimambedded in a branch-and-bound framework for bonstrained NLPs. They also proposed a hybrid glptimization method that includes the random-linktochastic approach with the aim at improving the compional performance.
.3. Concave, bilinear, fractional and multiplicativeodels
Zamora and Grossmann (1998b)introduced a deteinistic branch-and-bound approach for structured pro
ystems that have univariate concave, bilinear and l

1188 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
fractional terms. They proposed several properties ofthe contraction operation, embedded them in the globaloptimization algorithm and studied the contraction effectson several applications.Shectman and Sahinidis (1998)proposed a finite global optimization method for sepa-rable concave problems.Zamora et al. (1999)proposeda branch-and-contract global optimization algorithm forunivariate concave, bilinear, and linear fractional models.The emphasis was on reducing the number of nodes in thebranch-and-bound tree through proper use of the contractionoperator.Van Antwerp, Braatz, and Sahinidis (1999)studiedthe bilinear matrix inequality problem as a formulationof the globally optimal controller problem and applied abranch-and-bound global optimization approach to generatelower and upper bounds and prove optimality for a massspring model and a reactive ion etching problem.
Adhya, Tawarmalani, and Sahinidis (1999)studied bilin-ear models of the pooling problem, proposed a Lagrangianrelaxation approach for the generation of valid lower bounds,and showed that these bounds are tighter when compared tolinear programming based relaxations.Ryoo and Sahinidis(2003) studied linear and generalized linear multiplicativemodels, applied the recursive arithmetic interval approach forthe derivation of lower bounds, introduced greedy heuristicsfor a branch-and-reduce approach, and applied it to bench-mark problems and randomly generated problems.Goyal andI m-a icialo aveo
2
-t omo-g pro-p 97)a n ofs p-p ms.M alo ctione andc theG 8a)a bilityc tionod roachb agesf ilitya )u anal-yX theS pti-
mization approach, and applied it to binary systems.Zhu andXu (1999a)used simulated annealing for the stability anal-ysis of liquid–liquid equilibrium systems modelled via theNRTL and UNIQUAC equations for the activity coefficientsand studied ternary systems with up to three liquid phases.
Harding and Floudas (2000a)introduced a novel globaloptimization approach for the phase stability of several cubicequations of state based on analytical findings and the princi-ples of theBB global optimization framework.Harding andFloudas (2000b)studied the enclosure of all heterogeneousand reactive azeotropes, developed a rigorous frameworkbased on theBB global optimization principles, and demon-strated its potential for a variety of case studies.Tessier, Bren-necke, and Stadtherr (2000)introduced monotonicity basedand mole fraction weighted averages based enhancementsfor the application of interval Newton methods to the phasestability problem using the NRTL and UNIQUAC models.Zhu, Wen, and Xu (2000)proposed an enhanced simulatedannealing algorithm for the tangent plane stability problemusing the PR and SRK cubic equations of state.
Zhu and Inoue (2001)introduced a branch-and-bound ap-proach based on a quadratic underestimating function andapplied it to the tangent plane distance criterion using theNRTL equation.Xu, Brennecke, and Stadtherr (2002)stud-ied the phase stability criterion using the SAFT equation ofstate, introduced an interval Newton/generalized bisectiona d ont self-amd ns inp , de-r e de-p roach,a mines
2
sa thodf non-lp l-y ands od-e rt od-e tionf cor-r n theg theDt on ofa odel,a il-
erapetritou (2003a)introduced an approach for the systetic evaluation of the infeasible domains using a simpluter approximation framework that is applicable to concr quasiconvex constraints.
.4. Phase equilibrium
Maier, Brennecke, and Stadtherr (1998)applied an inerval analysis based approach for the enclosure of heneous azeotropes. They employed the formulationsosed byHarding, Maranas, McDonald, and Floudas (19nd studied systems with activity coefficient and equatiotate models.Meyer and Swartz (1998)proposed a new aroach for testing convexity for phase equilibrium problecKinnon and Mongeau (1998)proposed a generic globptimization approach for the phase and chemical reaquilibrium problem that is based on interval analysisombines the stability criterion with the minimization ofibbs free energy.Hua, Brennecke, and Stadtherr (199pplied an interval analysis method for the phase staomputations of binary and ternary mixtures using equaf state models.Hua, Brennecke, and Stadtherr (1998b)intro-uced two enhancements on their interval analysis appased on monotonicity and mole fraction weighted aver
or improving the efficiency in the tangent plane stabnalysis for cubic equations of state.Zhu and Xu (1999bsed simulated annealing for the tangent plane stabilitysis criterion and they applied it to ternary systems.Zhu andu (1999c)studied the tangent plane stability analysis forRK cubic equation of state through a Lipschitz global o
pproach, followed a volume-based formulation basehe Helmholtz energy, and applied to nonassociating,ssociating, and cross-associating systems.Cheung, Adji-an, Kolar, and Ishikawa (2002)studied the global minimumetermination of clusters for the solvent-solute interactiohase equilibrium. They introduced the OPLS force fieldived tight convex underestimators, derived bounds on thendent variables, developed a branch-and-bound appnd applied it to a butane molecule and a butane–ethylaystem.
.5. Parameter estimation
Esposito and Floudas (1998)studied the error-in-variablepproach and proposed the first global optimization me
or the parameter estimation and data reconcilliation ofinear algebraic models using the principles of theBB ap-roach.Gau and Stadtherr (2000)introduced an interval anasis based approach for the error-in-variables methodtudied vapor–liquid equilibrium and reaction kinetics mls. Gau, Brennecke, and Stadtherr (2000)studied furthe
he parameter estimation of vapor–liquid equilibrium mls via interval analysis, applied it using the Wilson equa
or a variety of binary systems, and demonstrated thatect predictions of azeotropes are attained only based olobal optimum parameter solutions in direct contrast toechema data collection.Gau and Stadtherr (2002a)applied
he interval-Newton approach for the parameter estimaticatalytic reactor model, a heat exchanger network m
nd binary vapor–liquid equilibrium problems using the W

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1189
son equation, and pointed out that problems of about 200variables can be addressed.
3. Mixed-integer nonlinear optimization, MINLPs
Zamora and Grossmann (1998a)derived thermodynamic-based convex underestimators, quadratic/linear fractionalconvex underestimators, and proposed a hybrid branch-and-bound and outer approximation method for the global opti-mization of heat exchanger networks with no stream splits.Westerlund, Skrifvars, Harjunkoski, and Porn (1998)pro-posed an extended cutting plane approach for the global opti-mization of pseudoconvex MINLP problems, studied its con-vergence properties, and applied it to an example from thepaper-converting industry.Vecchietti and Grossmann (1999)introduced a disjunctive programming approach for MINLPs,denoted as LOGMIP, discussed a hybrid modelling frame-work for process systems engineering which allows bothbinary variables and disjunctions as tools for discrete de-cisions, implemented a modified logic-based outer approx-imation approach, and presented computational studies ontwo process synthesis problems and an FT-IR spectroscopyexample.Sinha, Achenie, and Ostrovsky (1999)studied theclass of solvent design problems, modelled it as a nonconvexMINLP problem, identified the sources of nonconvexities int ints,p l rep-r uceds anda rob-l -g getsf ter-v tar-g ion,r asedt r us-a ,a forc stud-i rans-f ems.Hl try,f ma-t sen-t of thec es ofo orith-m n beo ionsp
n xed-i ach,
SMIN-BB is for separable continuous and integer domainsand it is based on the principles ofBB type of convex under-estimators and a branch-and-bound approach for the mixedset of continuous and binary variables. The second approach,GMIN-BB, is applicable to general mixed integer nonlin-ear problems which are not separable in the continuous andinteger variables, and it is based on a branch-and-bound treeconstructed only in the integer domain while theBB prin-ciples are used to solve the nonconvex NLPs at each node soas to generate valid lower bounds. The first approach was ap-plied to heat exchanger network problems, while the secondone was applied to pump network configuration problemsand trim loss minimization problems in addition to a varietyof benchmark problems.Kesavan and Barton (2000)intro-duced a generalized branch-and-cut algorithm for noncon-vex MINLPs, showed that decomposition-based approachesand branch-and-bound algorithms are special cases, and pro-posed a number of heuristics towards addressing the compu-tational efficiency issues.Sahinidis and Tawarmalani (2000)presented two MINLP applications of global optimizationfor the design of just-in-time flowshops, and the design ofan alterative to freon. In the first study, the model determinesthe stagewise number of machines needed that minimizesthe total equipment costs, and they showed improvementscompared to the heuristic approaches. In the second study,the model selects the constituent parts of a molecule so ast , en-v seda ativeca en-s nicc del,p hichi inci-p anda sivet ort tiona ethodf udo-c ver-g it ons is ands
al-i con-v der-e ara-b lgo-r in thed ial di-v pace,a sep-a lantsw esis.
he properties and solubility parameter design constraroposed linear underestimators based on a multileveesentation approach for the functions, developed a redpace branch-and-bound global optimization algorithm,pplied it to a single component blanket wash design p
em. Noureldin and El-Halwagi (1999)studied mass interation problems for pollution prevention, proposed tar
or the maximum achievable pollution, introduced an inal analysis framework for the determination of theseets, studied the pollution prevention via unit manipulatecycle and interception, and employed the interval-bargets in a case study featuring the reduction of watege and discharge in a tire-to-fuel plant.Porn, Harjunkoskind Westerlund (1999)proposed convexification schemeslasses of discrete and integer nonconvex models. Theyed the exponential transformation and potential-based tormations and applied them to integer posynomial problarjunkoski, Westerlund, and Porn (1999)studied the trim
oss minimization problem for the paper converting indusormulated it as a nonconvex MINLP, proposed transforions for the bilinear terms that are based on linear repreations and convex expressions, studied the reductionsombinatorial space, investigated the role of different typbjective functions, developed and assessed several algic alternatives, and showed that the global solution cabtained with all strategies and certain convex formulaterformed similarly to the linear models.
Adjiman, Androulakis, and Floudas (2000)proposed twoovel global optimization approaches for nonconvex mi
nteger nonlinear programming problems. The first appro
o satisfy chemical and physical properties, economicironmental constraints through a group contribution bapproach, and provides a ranked order list of alternompounds.Parthasarathy and El-Halwagi (2000)studiedsystematic framework for the optimal design of cond
ation which an important technology for volatile orgaompounds, formulated it as a nonconvex MINLP moroposed an iterative global optimization approach w
s based on physical insights and active constraint prles that allow for decomposition and efficient solution,pplied it to a case study for the manufacture of adhe
apes.Porn and Westerlund (2000)introduced procedures fhe successive linear approximation of the objective funcnd line search techniques, proposed a cutting plane m
or addressing global MINLP problems that feature pseonvex objective function and constraints, studied its conence properties and initialization schemes, and testedeveral benchmark problems arising in process synthescheduling applications.
Lee and Grossmann (2001)studied nonconvex generzed disjunctive programming models, constructed theex hull of each nonlinear disjunction, used convex unstimators for bilinear, linear fractional and concave seple functions, introduced a two level branch-and-bound aithm where the lower bound requires a discrete searchisjunctions space and the upper bound requires a spatide and conquer search in the nonconvex continuous snd applied it to benchmark problems, a multicomponentration problem, multistage design/synthesis of batch pith parallel units, and heat exchanger network synth

1190 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
Bjork and Westerlund (2002)studied the global optimiza-tion of heat exchanger network synthesis through the sim-plified superstructure representation that allows only seriesand parallel schemes, applied convexification approaches forsignomials via piecewise linear approximations, developedconvex MINLP lower bounding models using the Pattersonformula for the log mean temperature difference consideringboth isothermal and nonisothermal mixing, proposed a globaloptimization approach for alternative models, and presentedextensive computational studies.Wang and Achenie (2002b)studied solvent design problems which are formulated as non-convex MINLPs, introduced a hybrid global optimization ap-proach which combines outer approximation with simulatedannealing, applied it to several benchmark problems, casestudies for the extraction of acetic acid from water, and sol-vent design for reversible reactions, and showed that nearoptimal solutions can be located.Ostrovsky, Achenie, andSinha (2002)studied nonconvex MINLP models in whichmost variables are in the conconvex terms and the numberof linear constraints is much larger than the nonlinear con-straints, introduced the idea of branching on a set of linearbranching variables which depend linearly on the search vari-ables, proposed a tailored branch and bound approach usinglinear underestimators for tree functions based on a multi-level function representation, showed that there is a signifi-cant reduction in the branching variable space, and applied itt e( rac-t om-p roupc LPm nda tion.D -p delst raticM on-v s ofa atede f them
-s egerf ints,p d andh liquec l op-t e allf ds forr -o ationi hicht odel,p d on ar ulti-l atrix,
and presented comparative computational results.Ostrovsky,Achenie, and Sinha (2003)revisited their molecular designreduced dimension branch-and-bound algorithm by studyingfurther the branching functions concept and the special treefunction representation, proposed the sweep method for theconstruction of the linear underestimators, investigated theproblem size dependency on the algorithmic performance,and showed that the computational effort increases almostlinearly. Sinha, Achenie, and Gani (2003)studied the sys-tematic design of cleaning solvent blends for lithographicprinting, modelled it as a nonconvex MINLP problem, in-troduced an interval analysis based global optimization ap-proach with modifications on the upper bounding calculationand the local feasibility test which are solved via SQP, andan interval-based domain reduction algorithm, and presentedcomputational results for the design of aqueous blanket washblends.Zhu and Kuno (2003)proposed a hybrid global op-timization method for nonconvex MINLPs which combinesconvex quadratic underestimation techniques with a revisedform of the generalized Benders decomposition, suggestedits convergence properties, and illustrated it via a two vari-able problem.Goyal and Ierapetritou (2003b)studied MINLPmodels where the objective function is convex, and the con-straints are convex, concave or quasi-concave, introduced thesimplicial approximation of the convex hull of the feasibleregion, proposed algorithmic procedures and illustrated themvs rox-i actl con-v nds ncon-v cts,i jec-t d ag thel na ing,G litiesi tiono rep-r ivedb then ucei ntedc ons.L b-l un-d aintsu d thed tly re-l rliert ,2 rob-l prob-l
o solvent design and recovery problems.Wang and Acheni2002a)studied the molecular design of solvents for extive fermentation including solvent attributes such as biocatibility, inertness and phase splitting, introduced a gontribution framework which results in a conconvex MINodel, studied a local MINLP algorithm, OA/ER/AP, applied it to case studies on ethanol extractive fermentaua, Bozinis, and Pistikopoulos (2002)proposed novel aproaches for multiparametric mixed-integer quadratic mo
hrough the decomposition into a multiparametric quadIQP model for the upper bound and a potentially nonc
ex MINLP model for the lower bound, suggested wayddressing the nonconvexity in the MINLP, and genernvelopes of parametric solutions and the enclosure oultiparametric MIQP.Sahinidis, Tawarmalani, and Yu (2003)revisited the de
ign of alternative refrigerants problem, introduced an intormulation for previously described structural constraroposed new structural constraints between one-bondeigher-bonded groups in the absence of rings and new constraints for rings, applied a branch-and-reduce globaimization algorithm with a modification so as to generateasible integer solutions, and generated new compounefrigerants.Vaia and Sahinidis (2003)studied the simultaneus parameter estimation and model structure identific
n infrared spectroscopy, proposed two methods out of whe second corresponds to a single nonconvex MINLP mresented a branch-and-bound approach which is baseelaxation of terms that are logarithmic, bilinear, and minear depending on the determinant of the covariance m
ia small benchmark problems.Kallrath (2003)studied andolved a nonconvex product portfolio problem via an appmate MILP formulation of the objective function and exinear relations for the constraints, modelled it as a nonex MINLP problem for the optimization of the number aize of batch process units, analyzed the sources of noexity consisting of concave functions and trilinear produnvestigated the piecewise linear approximation of the obive function, the use of a local MINLP solver, SBB, anlobal optimization solver, Baron, and reported that for
arge instances weak lower bounds are generated.Grossmannd Lee (2003)studied generalized disjunctive programmDP, problems which feature convex nonlinear inequa
n the disjunctions, proposed a convex nonlinear relaxaf the nonlinear GDP problem based on the convex hullesentation of each of the disjunctions which was dery variable disaggregation and reformulation, formulatedonlinear GDP as a MINLP which was shown to prod
mproved bounds compared to big-M models, and preseomparative computational studies of the two formulatiee and Grossmann (2003)studied nonconvex GDP pro
ems with bilinear equality constraints, derived convexerestimators and overestimators for the bilinear constrsing the reformulation/linearization approach, expresseiscrete choices as disjunctions which were subsequen
axed by their convex hull representations, used their eawo level global optimization approach(Lee & Grossmann001), and presented computational studies for pooling p
ems, water usage problems, and wastewater networkems.

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1191
Lin, Floudas, and Kallrath (2004)revisited the noncon-vex product portfolio problem introduced byKallrath (2003),presented an improved formulation consisting of a concaveobjective function with linear constraints in the continuousand binary variables, proposed several techniques for tight-ening the model and accelerating its solution, developed acustomized branch-and-bound approach which addresses theproblem to global optimality, applied it to small and large in-stances, and demonstrated that global solutions can be ob-tained very efficiently in contrast to commercial MINLPsolvers.Kesavan, Allgor, Gadzke, and Barton (2004)stud-ied separable MINLP models with nonconvex functions, pro-posed two decomposition algorithms based on alternatingsequences of relaxed master problems, two nonlinear pro-gramming problems, and outer approximation, showed thatthe first algorithm yields the global solution while the sec-ond provides a rigorous bound on the global solution, andpresented computational results on several benchmark prob-lems and heat exchanger network problems.
4. Differential-algebraic models, DAEs
Esposito and Floudas (2000a)studied the global opti-mization in parameter estimation of systems described bydifferential-algebraic models, proposed a rigorous global op-t andt achb a va-r ha-n -i b-l esti-g ons,sf oughs -offso n ofti mics l con-t uceda compa d-v s byE enl ds.
e-a con-v d ag ap-p or-m s forc nI the
parameter estimation of nonlinear dynamic systems, formu-lated it as an optimal control that optimizes the Fischer infor-mation matrix, introduced two stochastic global optimizationapproaches to address the nonsmoothness and the multiplic-ity of solutions, and applied it to the parameter estimationof a fed-batch bioreactor.Papamichail and Adjiman (2002)introduced a deterministic spatial branch-and-bound globaloptimization approach for nonconvex models with ordinarydifferential equations, proposed a convex relaxation based onthe theory of differential inequalities which allowed them togenerate rigorous bounds for the parametric ODEs and theirsensitivities, and applied their framework to small optimalcontrol problems and reaction kinetics parameter estimationmodels.
Adjiman and Papamichail (2003)developed further theirbranch-and-bound approach, proposed three convex relax-ations for the parameter estimation of the initial value prob-lem, and presented computational results on several parame-ter estimation problems in kinetics.Singer and Barton (2003,2004)studied the global optimization of integral objectivefunctions subject to ordinary differential equations, derivedconvex relaxations for the integral based on a pointwise in-tegrand scheme, developed a branch-and-bound global opti-mization approach on a Euclidean space which combines theintegrand convex relaxations with differential inequalities,McCormick’s composition approach, and outer approxima-t nch-m lo iche viour,a e de-t itiont -l in-i vexr forl -t ani fi( pti-m tiale st ands thet ivitya tima-t nals jointa o( , pa-r d ons ems,a , pre-s pre-s iore-a ta
imization approach based on a collocation frameworkheBB principles, proposed a global optimization approased on an integration framework, and investigatediety of benchmark problems and complex kinetic mecisms.Esposito and Floudas (2000b)studied the determin
stic global optimization of nonlinear optimal control proems, introduced the integration-based framework, invated the properties of the input–output map of solutiuggested three alternative ways of calculating theβ valuesor the lower bounding problems, and demonstrated threveral challenging case studies the algorithmic tradef the different strategies, as well as the determinatio
he global solution.Barton, Banga, and Galan (2000)stud-ed the optimization of hybrid discrete/continuous dynaystems, presented a framework based on hybrid optimarol, investigated existence and sensitivity results, introd
modified stochastic search approach, and presentedutational results for a tank changeover problem.Espositond Floudas (2001)pointed out the theoretical rigor and aantages of the proposed global optimization methodsposito and Floudas (2000a)and the differences betwe
ocal search approaches and global optimization methoEsposito and Floudas (2002)studied the isothermal r
ctor network synthesis problem, formulated it as nonex NLP with differential-algebraic constraints, introducelobal optimization framework based on the integrationroach and theBB, investigated alternative types of refulations, and reported extensive computational studie
omplex reaction/reactor networks.Banga, Versyck, and Vampe (2002)studied the optimal experimental design for
-
ion, and illustrated their approach with several small beark problems.Lee and Barton (2003)studied the globaptimization of linear time varying hybrid systems whxhibit both discrete state and continuous state behand extended their recently developed approach for th
ermination of the optimal mode sequence when the transimes are fixed(Barton & Lee, 2003), proposed a reformuation of the problem via binary variables while maintang the linearity of the dynamical system, derived conelaxations of Bolza-type functions using recent resultsinear time varying continuous systems(Lee, Singer, & Baron, 2004), and applied it to benchmark problems andsothermal plug flow reactor problem.Chachuat and Lati2003) introduced a spatial branch-and-bound global oization approach for problems with ordinary differenquations in the constraints, presented results on the firecond order derivatives for the initial value problem andwo point boundary value problem, compared the sensitnd the adjoint approaches, developed convex underes
ors using theBB principles, and presented computatiotudies and comparisons of the sensitivity versus the adpproach for several problems.Banga, Moles, and Alons2003)studied integrated process design and operationameter estimation in bioprocess models, and focusetochastic global optimization methods for dynamic systddressed handling of constraints in stochastic methodsented hybrid approaches for dynamic optimization, andented computational studies on the optimal control of bctors, the integrated design of a waste treatment plan(seelso Moles, Gutierrez, Alonso, & Banga, 2003)where they

1192 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
provided comparisons for several algorithmic approaches,and discussed advances in the parameter estimation of bio-processes.Banga, Balsa-Canto, Moles, and Alonso (2003)reviewed and introduced optimization as a key technologyfor food processing and discussed stochastic global optimiza-tion methods and their potential applicability in food processengineering.
5. Grey-box and nonfactorable models
Byrne and Bogle (2000)studied the global optimizationof modular flowsheeting systems, introduced an approach tomodular based process simulation which is based on inter-val analysis and which can generate interval bounds, deriva-tives and their bounds for generic input–output modules, pro-posed a branch-and-bound global optimization algorithm,and applied it to an acyclic problem, and flowsheet withrecycle.
Meyer, Floudas, and Neumaier (2002)studied the globaloptimization of problems with nonfactorable constraints forwhich there does not exist an analytical form, proposed asampling phase in which the nonfactorable functions andtheir gradients are sampled and a new blending function isconstructed, presented a global optimization phase in whichlinear underestimators and overestimators are derived via in-t tes ina ed al tiono t foro eira halep tankr tsideo byG lch(
6
-t in-v seda itse opti-mp d ap-p esti-m 01)i fort estw on-s lem,a , anda
Pistikopoulos, Dua, and Ryu (2003)studied bilevel opti-mization models which are of linear–linear, linear–quadratic,quadratic–linear, or quadratic–quadratic type, and introducedapproaches from parametric programming to transform thebilevel problem into a family of single level optimizationproblems which can be solved to global optimality, and pre-sented computational results on several small benchmarkproblems.Gumus and Floudas (in press)studied the globaloptimization of bilevel mixed-integer optimization problems,proposed an approach that is applicable to mixed-integer non-linear outer problem and twice continuously differentiablenonlinear inner problem, introduced another approach basedon the convex hull representation of the inner problem, whichis applicable when the inner level problem features functionswhich are mixed integer nonlinear in the outer variables andlinear, polynomial, or multilinear in the inner integer vari-ables, and linear in inner continuous variables; and applied itto several challenging benchmark problems.
In the remainder of this paper, we will present recent ad-vances from Princeton University on (i) explicit facets forconvex and concave envelopes for trilinear functions, (ii)convex underestimators for trigonometric functions, (iii) newconvex underestimators based on a piecewise quadratic per-turbation function, and (iv) the generalizedBB convex un-derestimators.
7t
vexf pti-m s ish ons.M s-s lopesf l asw ble.T
7
thes t off nd int sxI re area ts toa
ef
x
erval analysis and the interpolants are used as surrogabranch-and-cut global optimization algorithm, discuss
ocal optimization stage where the global optimum soluf the interpolation problem becomes the starting poinptimizing locally the original problem, and illustrated thpproach through a small benchmark problem, an oilsyrolysis problem, and a nonlinear continuous stirredeactor model. Theoretical and algorithmic advances ouf Chemical Engineering in this area include the workutmann (2001), Jones (2001), Jones, Schonlau, and We
1998)and the recent book byZabinsky (2003).
. Bilevel nonlinear optimization
Gumus and Floudas (2001)studied the global optimizaion of bilevel nonlinear programming problems whicholve twice continuously differentiable functions, propoconvex relaxation of the inner problem followed by
quivalent representation via necessary and sufficientality conditions, introduced theBB global optimizationrinciples, presented a branch-and-bound framework, anlied it to several benchmark problems and parameteration problems.Floudas, Gumus, and Ierapetritou (20
ntroduced the first rigorous global optimization approachhe calculation of the flexibility index and the feasibility thich are bilevel nonlinear optimization models, and demtrated its applicability to a heat exchanger network probpump and pipe run problem, a reactor–cooler systemprototype process flowsheet model.
. Explicit facets of convex and concave envelopes forrilinear monomials
Approximations of the convex envelope of nonconunctions play a central role in deterministic global oization algorithms and the efficiency of these algorithmighly influenced by the tightness of these approximatieyer and Floudas (2003, 2004)proposed explicit expre
ions defining the facets of the convex and concave enveor trilinear monomials, with mixed sign domains, as welith positive or negative bounded domains for each variahese advances are discussed in the sequel.
.1. Facets of the convex envelope
The description of the nonvertical facets depends onigns of the bounds onx. In this section, we present the seacets for Case 1 (the complete set of cases can be fouhe papers byMeyer & Floudas, 2003, 2004a). The symbol, y, andzare used to denote a permutation ofx1, x2 andx3.n addition to the signs of the bounds, in some cases theuxiliary inequalities that must be satisfied for the facepply.Case 1: x ≥ 0, y ≥ 0, z ≥ 0.Mappingx1, x2, x3 ontox, y, z in such a way that th
ollowing relations apply,
yz + xyz ≤ xyz + xyz, xyz + xyz ≤ xyz + xyz,
C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1193
the linear equalities defining the facets ofC3(x) are:
w = yzx + xzy + xyz − 2xyz,
w = yzx + xzy + xyz − 2xyz,
w = yzx + xzy + xyz − xyz − xyz,
w = yzx + xzy + xyz − xyz − xyz,
w = θ
x − xx + xzy +xyz +
(− θx
x − x− xyz − xyz + xyz
),
whereθ = xyz − xyz − xyz + xyz,
w = θ
x − xx + xzy + xyz +
(− θx
x − x−xyz − xyz + xyz
),
whereθ = xyz − xyz − xyz + xyz.
7.2. Illustration
To construct the lower bounding facets ofC3(x) wherex = [1, 2] × [1, 2] × [1, 2] we first observe that all boundsare positive (i.e., Case 1). As the bounds on all the vari-ables are the same it makes no difference how we mapx1, x2, x3 onto x, y, z. After substitution, the facetsbecome:
N weo om-p roxi-m rt asesa 3,2
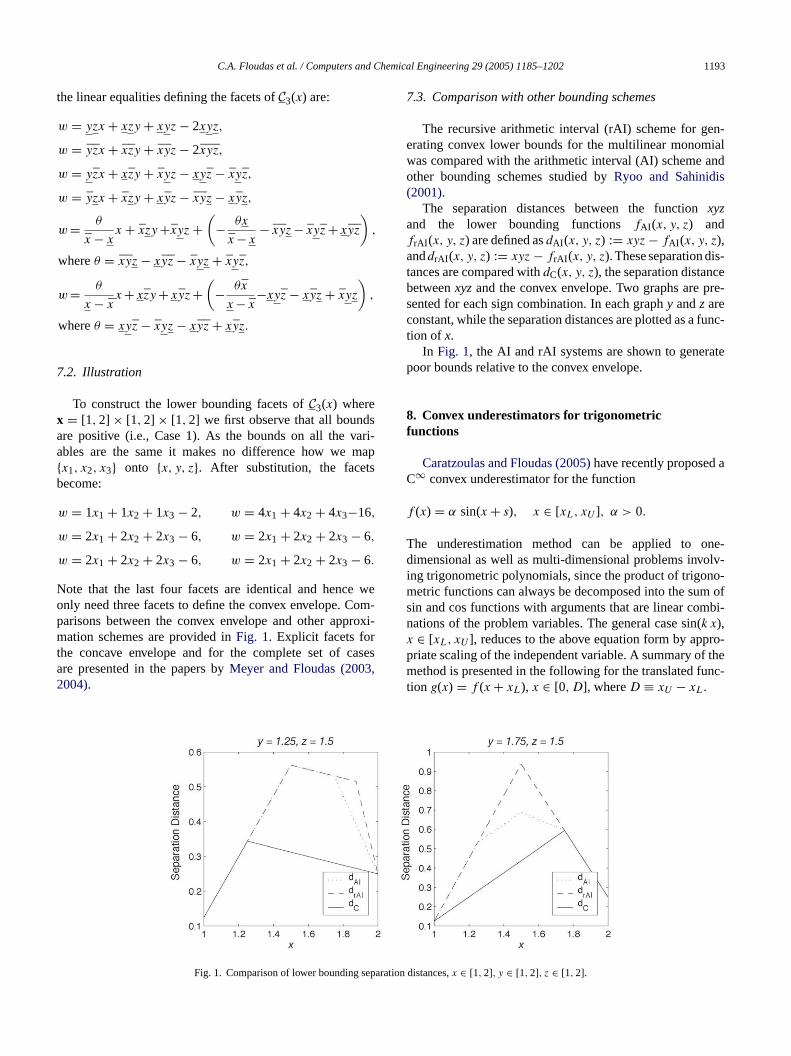
7.3. Comparison with other bounding schemes
The recursive arithmetic interval (rAI) scheme for gen-erating convex lower bounds for the multilinear monomialwas compared with the arithmetic interval (AI) scheme andother bounding schemes studied byRyoo and Sahinidis(2001).
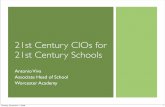
The separation distances between the functionxyzand the lower bounding functionsfAI (x, y, z) andfrAI (x, y, z) are defined asdAI (x, y, z) := xyz − fAI (x, y, z),anddrAI (x, y, z) := xyz − frAI (x, y, z). These separation dis-tances are compared withdC(x, y, z), the separation distancebetweenxyzand the convex envelope. Two graphs are pre-sented for each sign combination. In each graphy andz areconstant, while the separation distances are plotted as a func-tion of x.
In Fig. 1, the AI and rAI systems are shown to generatepoor bounds relative to the convex envelope.
8. Convex underestimators for trigonometricfunctions
Caratzoulas and Floudas (2005)have recently proposed aC∞ convex underestimator for the function
f
T one-d olv-i no-m m ofs mbi-n (x pro-p f them nc-t
eparat
w = 1x1 + 1x2 + 1x3 − 2, w = 4x1 + 4x2 + 4x3−16,
w = 2x1 + 2x2 + 2x3 − 6, w = 2x1 + 2x2 + 2x3 − 6,
w = 2x1 + 2x2 + 2x3 − 6, w = 2x1 + 2x2 + 2x3 − 6.
ote that the last four facets are identical and hencenly need three facets to define the convex envelope. Carisons between the convex envelope and other appation schemes are provided inFig. 1. Explicit facets fo
he concave envelope and for the complete set of cre presented in the papers byMeyer and Floudas (200004).
Fig. 1. Comparison of lower bounding s
(x) = α sin(x + s), x ∈ [xL, xU ], α > 0.
he underestimation method can be applied toimensional as well as multi-dimensional problems inv
ng trigonometric polynomials, since the product of trigoetric functions can always be decomposed into the su
in and cos functions with arguments that are linear coations of the problem variables. The general case sink x),∈ [xL, xU ], reduces to the above equation form by apriate scaling of the independent variable. A summary oethod is presented in the following for the translated fu
ion g(x) = f (x + xL), x ∈ [0, D], whereD ≡ xU − xL.
ion distances,x ∈ [1, 2], y ∈ [1, 2], z ∈ [1, 2].

1194 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
Caratzoulas and Floudas (2005)considered as underes-timating function the following three-parameter (a, b, xs)trigonometric function
φ(x) = −a sin[k(x − xs)] + b, x ∈ [0, D], a ≥ 0,
wherek = 2π/L, andL is the period ofφ(x). For φ(x) tobe convex, the conditionsxs ≤ 0 andL ≥ 2(D − xs) mustbe satisfied. They consideredL = 2(D − xs) + M, whereM ∈ R+, an arbitrary positive, real number, that makes theperiod ofφ(x) dependent on the phase shiftxs. They provedthat anyM ≥ 2D is sufficient, and by means of asymptoticanalysis of the solution have further shown, rigorously, thatthe value ofM does not affect how tight the underestimatorwill be.
Of the three equations necessary to uniquely determinethe parametersa, b and xs, two are obtained from the re-quirement that at the bounds of the domainφ(x) matchg(x), that is,g(x0) = φ(x0), x0 ∈ 0, D. If g(x) is noncon-vex and the domain includes at least one minimum, the au-thors obtain a third equation by settingg(q) = t(q), wheret(x) = g(x0) + g′(xt)(x − x0), x0 ∈ 0, D, is tangent tog(x)at the pointxt and passes through the pointx0; q ∈ (0, D)denotes the minimum ofg(x) nearest tox0. From these equa-tions,Caratzoulas and Floudas (2005)obtained
a
a
b
wg e.F
t
x
T toni at itaa
x
q
D, one obtains the tangent linetu(x). Thus, they obtain twosets of parameters, (al, bl, xsl) for q = ql, and (au, bu, xsu)for q = qu, and the respective functionsφl(x) andφu(x). Ifbothφl(x) andφu(x) are underestimators, the tighter one ischosen—that is the one with the smaller amplitude parameter,a. Caratzoulas and Floudas (2005)proved that:
Property 1: For M ≥ 2D, the functionF (x) = φl(x) −φu(x) cannot have a single root in the interval[ql, qu].
Property2: If tl(ql) > tu(ql)andtl(qu) < tu(qu),asufficientcondition forφl(x) (φu(x)) to be an underestimator isthat the function(φl − tu)(x) ((φu − tl)(x)) has a root in[ql, qu].
Theorem 1. At least one of the functionsφl(x) and φu(x)constructed above is an underestimator.
If g(x) is nonconvex and the domain doesnot include aminimum, in the rather trivial case whereg(0) > g(D) andthe tangent tog(x) passing throughx = 0 does not exist,namelyxt /∈ [0, D], the underestimator is a line through theend points; similarly ifg(0) < g(D) and the tangent tog(x)passing throughx = D does not exist. That would also bethe case ifg(0) = g(D). If, however, either one of the twotangents exists, an underestimator of the same form as be-fore is sought. By enforcing the same end-points matchingc ram-e int,t eysg
x
Co
8
-h2 d thatt edo d them ont sti-m
m
m
wr ,t
= + δ,0(fL − T )
sin(kxs) + sink[D − (D − q) δ,0 − xs] ,
nd
= fL − [ + δ,0(fL − T )] sin(kxs)
sin(kxs) + sink[D − (D − q) δ,0 − xs] ,
here fL ≡ f (xL), fU ≡ f (xU ), ≡ fL − fU = g(0) −(D); T ≡ t(q); andδ,0 = 1, if = 0, and zero otherwisor the phase shift,xs, they obtained
an(kxs) = − sin(kq) + (T − fL) sin(kD)
(1 − cos(kq))
+ (T − fL)(1 − cos(kD))
, = 0,
s = −M/2 > 0, = 0.
his equation must be solved numerically (a few Newterations have proven sufficient) and it was shown thlways has a solution, that is, for givenqandL (i.e.,M) therelways exists a uniquexs < 0 satisfying it.
For x0 = 0, andq = ql the minimum ofg(x) nearest to= 0, one obtains the tangent linetl(x). For x0 = D, and= qu the minimum ofg(x) nearest to the end pointx =
maxx∈[0,D]
min
x∈[0,D][g(x)] − φ(x)
∼
onditions as before, one obtains the equations for the patersa andb. However, in the absence of a minimum po
he conditionφ(q) = t(q) cannot be employed. Instead, thet (dφ/dx)x=0 = 0 if g(0) < g(D), or (dφ/dx)x=D = 0 if(0) > g(D), to obtain:
s =
−D − M/2, < 0
D − M/2, > 0.
aratzoulas and Floudas (2005)proved that the functionφ(x)btained in this manner is also an underestimator.
.1. Maximum separation distance
Caratzoulas and Floudas (2005)investigated the beaviour of the solutions with respect to the parameterM ≥D as that becomes very large. In all cases, they showehe curvature,ak2, of φ(x) approaches a finite value. Basn their asymptotic analysis, they also have investigateaxx∈[0,D]minx∈[0,D] [g(x)] − φ(x) and its dependence
he domain size,D, as a measure of high tight an undereatorφ(x) is. Specifically, they showed that asM → ∞
inx∈[0,D] [g(x)] − fL + /[4rD(1 − rD)], = 0
inx∈[0,D] [g(x)] − fL + (fL − T )D2/[4q(D − q)], = 0,
here r ≡ [q + (T − fL)D]/[q2 + (T − fL)D2], with∼ 1/D and 1− rD ∼ q/[D(fL − T )]. As D increases
he quantity on the left-hand side grows linearly.

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1195
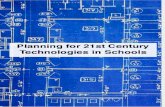
Fig. 2. The functionf(x) in illustrative example and its underestimator. Wealso plot the trigonometric terms, sinx and sin(10x/3), of f(x) and theirindividual underestimators, as computed by the method of Caratzoulas andFloudas (2005).
8.2. Illustration
As an example, let us consider the following function:f (x) = sinx + sin 10x
3 + ln x − 0.84x, 1.5 ≤ x ≤ 12.484.This function has a unique minimum with an objective func-tion value of−8.7429 located atx = 10.914. Applying theproposed convex underestimation approach on this exampleto underestimate, individually, each of the first two terms inf(x), the term lnx, being concave, has been underestimatedby a straight line connecting the end points of the domain.The first initial lower bound is−9.7818 at x = 9.656.Using BB with the theoretical valueα = 6.0007, oneobtains an initial lower bound of−185.2376 located atx = 6.992. Fig. 2 presents graphs off(x), of its trigono-metric terms and their underestimators, and of the overallunderestimator.
9. Convex underestimators by piecewise quadraticperturbation
Meyer and Floudas (in press)introduced a refine-ment of the classicalBB convex underestimator, via asmooth, piecewise quadratic, perturbation function,q. Inthis section, we will briefly introduce the concepts be-hind the BB type of underestimators, and we will sub-s tima-t ationf
g as ntin-u icpi
φ
The BB convexification approach can be viewed as anapproximate solution to a more general convexification prob-lem, that of finding a convexifying perturbation functionq(x)which minimizes a measure,µ, of the separation between anonconvexC2 continuous functionf(x) and the convex un-derestimatorf (x) − q(x). The size of the domainx affectsthe result of every step in theα calculation and strongly in-fluences the tightness of the resulting convex underestimator.In particular, reducingx reduces the mismatch between theassumed quadratic functional form and the ideal form; it re-duces the overestimation in the interval extension of the Hes-sian matrix; and the maximum separation distance has beenshown to be a quadratic function of interval length(Floudas,2000a). Constructing a convex underestimator using a num-ber of differentα vectors, each applying to asubregionof thefull domainx can lead to improved convex underestimatorsand it is discussed in the sequel.
Let f(x) be aC2 continuous function. For each variablexi,let the interval [xi, xi] be partitioned intoNi subintervals. Theendpoints of these subintervals are denotedx0
i , x1i , . . . , x
Nii
where xi = x0i < x1
i < · · · < xki < · · · < x
Nii = xi. In this
notation thekth interval is [xk−1i , xk
i ]. A smooth convex un-derestimator off(x) overx is defined by
φ(x) := f (x) − q(x),
w
It llmqf tedf
df tsI y-p ingc
equently focus on the new class of convex underesors that are based upon a piecewise quadratic perturbunction.
TheBB algorithm is based on the idea of constructinmooth convex underestimator of a nonconvex twice coously differentiable functionf(x) using a convex quadraterturbation function,q(x) The convex underestimatorφ(x)
s defined as follows:
(x) := f (x) − q(x).
here
q(x) :=n∑
i=1
qki (xi) for xi ∈ [xk−1
i , xki ],
qki (xi) := αk
i (xi − xk−1i )(xk
i − xi) + βki xi + γk
i .
n each interval [xk−1i , xk
i ], αki ≥ 0 is chosen such that∇2φ(x),
he Hessian matrix ofφ(x), is positive semi-definite for aembers of the setx ∈ x : xi ∈ [xk−1
i , xki ]. qk
i (xi) is theuadratic function associated with variablei in intervalk. The
unction q(x) is a piecewise quadratic function construcrom the functionsqk
i (xi).The continuity and smoothness properties ofq(x) are pro-
uced in a spline-like manner. Forq(x) to be smooth theqki
unctions and their gradients must match at the endpoinxki .
n addition, we require thatq(x) = 0 at the vertices of the herrectanglex. To satisfy these requirements, the followonditions are imposed for alli = 1, . . . , n:
q1i (x0
i ) = 0,
qki (xk
i ) = qk+1i (xk
i ) for all k = 1, . . . , Ni − 1,
qNii (xNi
i ) = 0,
dqki
dxi
∣∣∣∣∣xk
i
= dqk+1i
dxi
∣∣∣∣∣xk
i
for all k = 1, . . . , Ni − 1.

1196 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
Expanding and solving these equations, we obtain:
β1i =
(Ni−1∑k=1
ski (xk
i − xNii )
)/(xNi
i − x0i ),
βki = β1
i +k−1∑j=1
sji for all k = 2, . . . , Ni,
γki = −β1
i x0i −
k−1∑j=1
sji x
ji for all k = 1, . . . , Ni,
with ski = −αk
i (xki − xk−1
i ) − αk+1i (xk+1
i − xki ).
This class of convex underestimators satisfies the follow-ing smoothness, underestimation, and convexity properties.
Property 1: φ(x) : x x → R is a continuously differen-tiable function.
Property 2: If αki ≥ 0 for all k = 1, . . . , Ni − 1, and i =
1, . . . , n, then q(x) is concave overx.Property 3: φ(x) is an underestimator of f(x), that isφ(x) ≤
f (x) for all x ∈ x.Property 4: Let f be a function differentiable on an opensetΩ ⊂ Rn, and let C be a convex subset ofΩ. Then, fis convex on C if and only if its gradient∇f is monotone
-
-
9
n,
f
i sfw atesw ina
m
T in-t y
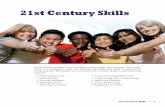
Fig. 3. Lennard–Jones potential function and underestimators.
function, the classicalBB underestimator, and theφ(x) un-derestimators are shown inFig. 3. In this figure theα splineunderestimator based on two subregions is denoted,φ(2),while that based on 16 subregions is denoted,φ(16).
10. The generalizedBB global optimizationapproach
In this section, the convex underestimators of the classicalBB global optimization approach are outlined first, thenew class of convex underestimators is presented next alongwith their key theoretical properties and an illustrativeexample which compares the quality of the new convexunderestimators.
10.1. Convex underestimators of theBB method
In BB, a convex underestimator of a nonconvex functionis constructed by decomposing it into a sum of nonconvexterms of special type (e.g., linear, bilinear, trilinear, frac-tional, fractional trilinear, convex, univariate concave) andnonconvex terms of arbitrary type. The first type is thenreplaced by very tight convex underestimators which arealready known(Floudas, 2000a). For the nonconvex termsof arbitrary type, whose convex envelopes are not known,a convex underestimator is generated by adding to them ther
φ
wi
L
i eφ
on C.Property 5: Let f : R ⊃ x→ R be a twice continuously differentiable function overx. Let φ(x) :=f (x) − q(x). If ∇2(f (x) −∑n
i=1 qki (x)) ≥ 0 for all
x ∈ I := [xk1−11 , x
k11 ] × · · · × [xkn−1
n , xknn ] where x
kii ∈
x1i , . . . , x
Ni−1i , i = 1, . . . , n, thenφ(x) is a convex func
tion onx.
.1. Illustrative example
Consider the Lennard–Jones potential energy functio
(x) = 1
x12 − 2
x6 ,
n the interval [x, x] = [0.85, 2.00]. The first term of thiunction is a convex function and dominates whenx is small,hile the second term is a concave function which dominhenx is large. The minimum eigenvalue of this functionn interval [x, x] can be calculated explicitly as follows:
inf ′′ =
156
x14 − 84
x8 if x ≤ 1.21707
−7.47810 if [x, x] 1.21707
156
x14 − 84
x8 if x ≥ 1.21707.
he classicalBB underestimator for this function anderval isf (x) − 7.47810
2 (x − x)(x − x). The potential energ
elaxation function,φ(x; α):
(x; α) = −n∑
i=1
αi(xi − xLi )(xU
i − xi),
hereαi ≥ 0, i = 1, 2, . . . , n. That is, if we assume thatf(x)s an arbitrarily nonconvex function, then
BB(x; α) = f (x) + φ(x; α),
s an underestimator of f(x). Note that sinc(xL; α) = φ(xU ; α) = 0 the underestimatorLBB(x; α)

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1197
coincides withf(x) at the end-points ofX. Also by noting thatthe relaxation functionφ(x; α) is separable we can derivethe following relationship that exists among the Hessianmatrices ofLBB(x; φ), f (x) andφ(x; α):
∇2LBB(x; α) = ∇2f (x) + 2A,
where A = ∇2φ(x; α) = diagα1, α2, . . . , αn. From theabove equation it can be derived thatLBB(x; α) is convexif and only if ∇2LBB(x; α) is positive semi-definite matrix.It is shown inAdjiman et al. (1998a)that if the parametersαi, i = 1, 2, . . . , n, have values greater than or equal tothe negative one half of the minimum eigenvalue of theHessian matrix∇2f (x) in the whole domainX = [xL, xU ],then the underestimatorLBB(x; α) is convex function. Thecalculation of the smallest eigenvalue of the Hessian matrixof an arbitrarily nonconvex function is done by generatingthe interval Hessian matrix and requiring that the intervalHessian matrix is positive semi-definite.
Adjiman et al. (1998a)and Floudas (2000a)developedseveral methods that calculate appropriate values for allαi,i = 1, 2, . . . , n that ensure the positive semi-definiteness ofthe interval matrix [∇2LBB(x; α)] and consequently the con-vexity of the underestimating functionLBB(x; α). Thesemethods can be classified into two categories. The first cate-gory consists of methods that find a common value for everyp cal-c
her-s yt
α
wap etersi h aw der-e
1
-ia
L
w
Φ
andγ = (γ1, γ2, . . . , γn)T is a vector of non-negative param-eters.Akrotirianakis and Floudas (2005)proved the follow-ing properties of the functionL1(x; γ):
Property 1: L1(x; γ) ≤ f (x), for all x ∈ [xL, xU ], becauseΦ(x; γ) ≤ 0 for all x ∈ [xL, xU ] andγ ≥ 0.
Property 2: L1(xC; γ) = f (xC), for every corner pointxC
of X, becauseΦ(xC; γ) = 0 for all xC ∈ X.Property 3: There exist certain values of the parameters
γi so thatL1(x; γ) is a convex function. This is due tothe fact that the relaxation functionΦ(x; γ) is convexfor everyx ∈ X andγi ≥ 0, i = 1, 2 . . . , n. Hence if theparametersγi have large enough values then all the non-convexities in the original functionf(x) can be eliminated,thereby producing a convex functionL1(x; γ).
Property 4: The maximum separation distance betweenthe nonconvex function f(x) and its underestimatorLGαBB(x; γ) is
maxxL≤x≤xU
f (x) − L1(x; γ) =n∑
i=1
(1 − e1/2γi(xUi
−xLi
))2.
Property 5: The underestimators constructed over super-sets of the current set are always less tight than the
ons-
-t ran-te -t
L
T ingt
2
w -o tioni andi-d scaledG
t n them -d
T ea
arameterαi, whereas methods of the second categoryulate different values for eachαi.
The most efficient of those methods is the scaled Gchgorin. The value for each parameterαi is determined bhe equation:
i = max
0, −1
2
f
ii−∑j =i
max|fij|, |fij|dj
di
,
herefij
andfij are the lower and upper bounds of∂2f/∂xixj
s calculated by interval analysis, anddi, i = 1, 2, . . . , n areositive parameters. A common choice for those param
s di = xUi − xL
i , which reflects the fact that variables witider range have a larger effect on the quality of the unstimator than variables with a smaller range.
0.2. The new class of convex underestimators
Akrotirianakis and Floudas (2005)proposed the followng new class of underestimating functions,L1(x; γ), of anrbitrary nonconvex function,f(x):
1(x; γ) = f (x) + Φ(x; γ),
here
(x; γ) = −n∑
i=1
(1 − eγi(xi−xLi
))(1 − eγi(xUi
−xi)),
underestimator constructed over the current box ctraints.
The values of the parametersγi, i = 1, 2, . . . , n are deermined by an iterative procedure that not only guaees the convexity of the underestimatorL1(x; γ) but alsonsures thatL1(x; γ) is tighter than theBB underes
imator
BB(x; α) = f (x) −n∑
i=1
αi(xi − xLi )(xU
i − xi).
he initial values of theγi parameters are selected by solvhe system of nonlinear equations
i + γ2i + γ2
i eγ(xUi
−xLi
) = 0, i = 1, 2, . . . , n,
here2i ≤ 0, i = 1, 2, . . . , n. The parameters2i convey secnd order characteristics of the original nonconvex func
nto the construction process of the underestimator. Cate values for these parameters can be provided by theerschgorin method(Adjiman et al., 1998a).Akrotirianakis and Floudas (2005)proved the following
wo important results regarding the relationship betweeaximum separation distances betweenf(x) and the two unerestimatorsL1(x; γ) andLBB(x; α).
heorem 2. Letγ = (γ1, γ
2, . . . , γ
n)T be the solution of th
bove system. Then, the two underestimatorsL1(x; γ) and
1198 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
LBB(x; α), where
α =(
4(1− e0.5γ1(xU
1 −xL1 ))2
(xU1 − xL
1 )2, . . . ,
4(1− e0.5γn(xU
n −xLn ))2
(xUn − xL
n )2
)T
,
have the same maximum separation distance from f(x).
Theorem 3. Let α = (α1, α2, . . . , αn)T be the values of theα parameters as computed by(10).Then, the two underesti-matorsL1(x; γ) andLBB(x; α), where
γ =(
2 log(1+ √α1(xU
1 − xL1 )/2)
xU1 − xL
1
, . . . ,
2 log(1+ √αn(xU
n − xLn )/2)
xUn − xL
n
)T
,
have the same maximum separation distance from f(x).
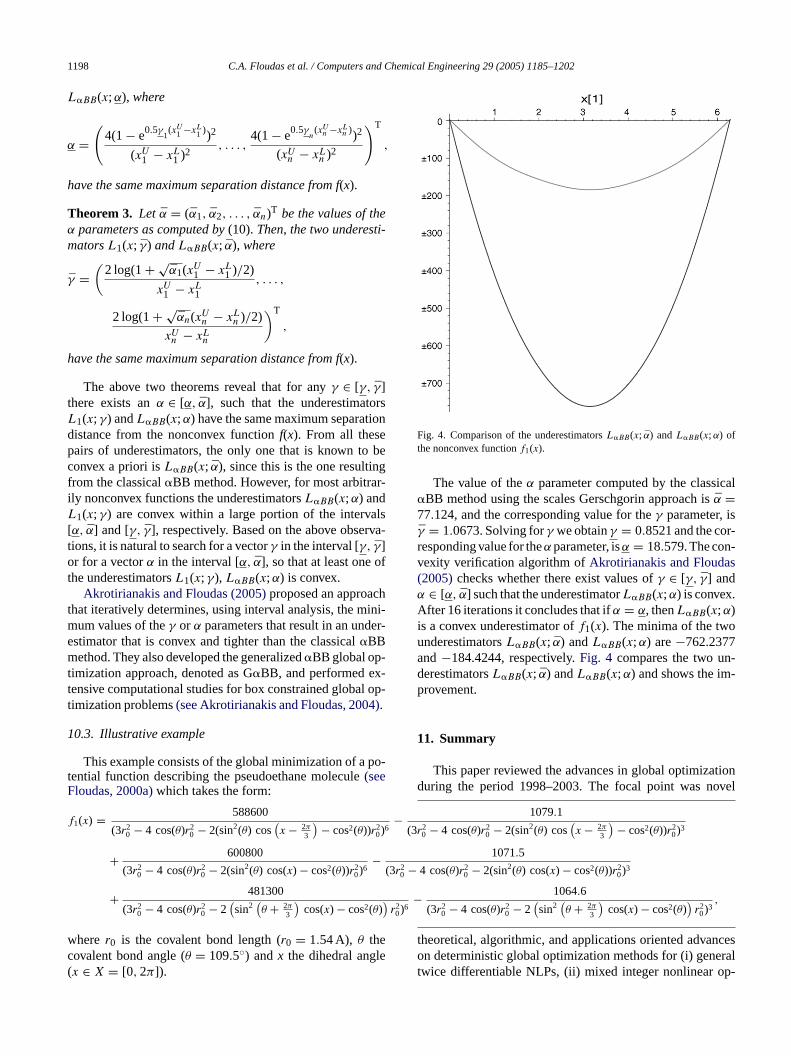
The above two theorems reveal that for anyγ ∈ [γ, γ]there exists anα ∈ [α, α], such that the underestimatorsL1(x; γ) andLBB(x; α) have the same maximum separationdistance from the nonconvex functionf(x). From all thesepairs of underestimators, the only one that is known to beconvex a priori isLBB(x; α), since this is the one resultingfrom the classicalBB method. However, for most arbitrar-iL als[ rva-to oft
cht ini-m er-emt -t l op-t 4)
1
po-tF
f − 1079.1
(3r20 − 4 cos(θ)r2
0 − 2(sin2(θ) cos(x − 2π
3
)− cos2(θ))r20)3
1071.5
3r20 − 4 cos(θ)r2
0 − 2(sin2(θ) cos(x) − cos2(θ))r20)3
r20)6
−
wc e(
Fig. 4. Comparison of the underestimatorsLBB(x; α) andLBB(x; α) ofthe nonconvex functionf1(x).
The value of theα parameter computed by the classicalBB method using the scales Gerschgorin approach isα =77.124, and the corresponding value for theγ parameter, isγ = 1.0673. Solving forγ we obtainγ = 0.8521 and the cor-responding value for theα parameter, isα = 18.579. The con-vexity verification algorithm ofAkrotirianakis and Floudas(2005)checks whether there exist values ofγ ∈ [γ, γ] andα ∈ [α, α] such that the underestimatorLBB(x; α) is convex.After 16 iterations it concludes that ifα = α, thenLBB(x; α)is a convex underestimator off1(x). The minima of the twounderestimatorsLBB(x; α) andLBB(x; α) are−762.2377and−184.4244, respectively.Fig. 4 compares the two un-derestimatorsLBB(x; α) andLBB(x; α) and shows the im-provement.
11. Summary
This paper reviewed the advances in global optimizationduring the period 1998–2003. The focal point was novel
t nceso eralt p-
ly nonconvex functions the underestimatorsLBB(x; α) and1(x; γ) are convex within a large portion of the interv
α, α] and [γ, γ], respectively. Based on the above obseions, it is natural to search for a vectorγ in the interval [γ, γ]r for a vectorα in the interval [α, α], so that at least one
he underestimatorsL1(x; γ), LBB(x; α) is convex.Akrotirianakis and Floudas (2005)proposed an approa
hat iteratively determines, using interval analysis, the mum values of theγ or α parameters that result in an undstimator that is convex and tighter than the classicalBBethod. They also developed the generalizedBB global op-
imization approach, denoted as GBB, and performed exensive computational studies for box constrained globaimization problems(see Akrotirianakis and Floudas, 200.
0.3. Illustrative example
This example consists of the global minimization of aential function describing the pseudoethane molecule(seeloudas, 2000a)which takes the form:
1(x) = 588600
(3r20 − 4 cos(θ)r2
0 − 2(sin2(θ) cos(x − 2π
3
)− cos2(θ))r20)6
+ 600800
(3r20 − 4 cos(θ)r2
0 − 2(sin2(θ) cos(x) − cos2(θ))r20)6
−(
+ 481300
(3r20 − 4 cos(θ)r2
0 − 2(sin2(θ + 2π
3
)cos(x) − cos2(θ)
)herer0 is the covalent bond length (r0 = 1.54 A), θ theovalent bond angle (θ = 109.5) andx the dihedral anglx ∈ X = [0, 2π]).
1064.6
(3r20 − 4 cos(θ)r2
0 − 2(sin2(θ + 2π
3
)cos(x) − cos2(θ)
)r2
0)3,
heoretical, algorithmic, and applications oriented advan deterministic global optimization methods for (i) gen
wice differentiable NLPs, (ii) mixed integer nonlinear o

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1199
timization problems MINLPs, (iii) models with differential-algebraic constraints, (iv) grey-box and nonfactorable mod-els, and (iv) bilevel nonlinear and mixed-integer optimization.Recent advances from Princeton University were also pre-sented on convex and concave envelopes for trilinear mono-mials, convex underestimators for trigonometric functions, anew class of convex smooth piecewise underestimators witha quadratic perturbation that use as a basis the classicalBBtype of underestimators, and a new class of generalized andimproved convex underestimators for twice continuously dif-ferentiable functions. Illustrative examples were presented tohighlight the potential benefits of these recent advances.
Acknowledgements
Christodoulos A. Floudas gratefully acknowledges sup-port from the National Science Foundation, the NationalInstitutes of Health, AspenTech Corporation and AtofinaChemicals.
References
Adhya, N., Tawarmalani, M., & Sahinidis, N. V. (1999). A Lagrangian ap-proach to the pooling problems.Industrial and Engineering Chemistry
A balII.al
A iza-
A a).leng
A iza-as,
.
A on-ined
A nceprob-
A und
atics
B Im-
B tionudas.
B n ofod-l
Bard, J. F. (1998).Practical bilevel optimization. Nonconvex optimizationand its applications. Kluwer Academic Publishers.
Barton, P. I., Banga, J. R., & Galan, S. (2000). Optimization of hybrid dis-crete/continuous dynamic systems.Computers and Chemical Engineer-ing, 24, 2171–2182.
Barton, L., & Lee, C. K. (2003). Global dynamic optimization of linear timevarying hybrid systems.Dynamics ofContinuousDiscrete and ImpulsiveSystems-Series B, S, 153.
Bjork, K. J., Lindberg, P. O., & Westerlund, T. (2003). Some convexifica-tions in global optimization of problems containing signomial terms.Computers and Chemical Engineering, 27, 669–679.
Bjork, K. J., & Westerlund, T. (2002). Global optimization of heat exchangernetwork synthesis problems with and without the isothermal mixing as-sumption.Computers and Chemical Engineering, 26, 1581–1593.
Byrne, R. P., & Bogle, I. D. L. (1999). Global optimization of constrainednon-convex programs using reformulation and interval analysis.Com-puters and Chemical Engineering, 23, 1341.
Byrne, R. P., & Bogle, I. D. L. (2000). Global optimization of molecularprocess flowsheets.Industrial and Engineering Chemistry Research, 39,4296–4301.
Caratzoulas, S., & Floudas, C. A. (2005). A trigonometric convex underes-timator for the base functions in Fourier space.Journal of OptimizationTheory and Its Applications, 124(2), 339–362.
Chachuat, B., & Latifi, M. A. (2003). A new approach in deterministic globaloptimization of problems with ordinary differential equations. In C. A.Floudas, & P. M. Pardalos (Eds.),Frontiers in global optimization(pp.83–108). Santorini, Greece: Kluwer Academic Publishers.
Cheung, A., Adjiman, C. S., Kolar, P., & Ishikawa, T. (2002). Globaloptimization for clusters of flexible molecules-solvent-solute interac-tion energy calculations.Fluid Phase Equilibrium, 194–197, 169–
b-
-les
e
n
on
n
m-
i-x
onn,
li-
Research, 38, 1956–1972.djiman, C. S., Androulakis, I. P., & Floudas, C. A. (1998b). A glo
optimization method,BB, for general twice-differentiable NLPs—Implementation and computational results.Computers and ChemicEngineering, 22 (9), 1159–1179.
djiman, C. S., Androulakis, I. P., & Floudas, C. A. (2000). Global optimtion of mixed-integer nonlinear problems.AIChE Journal, 46, 1769.
djiman, C. S., Dallwig, S., Floudas, C. A., & Neumaier, A. (1998A global optimization method,BB, for general twice-differentiabNLPs—I. Theoretical advances.Computers and Chemical Engineeri,22 (9), 1137–1158.
djiman, C. S., & Papamichail, I. (2003). A deterministic global optimtion algorithm for problems with nonlinear dynamics. In C. A. Floud& P. M. Pardalos (Eds.),Frontiers in global optimization(pp. 1–24)Santorini, Greece: Kluwer Academic Publishers.
krotirianakis, I. G., & Floudas, C. A. (2004). A new class of improved cvex underestimators for twice continuously differentiable constraNLPs.Journal of Global Optimization, 30 (4), 367–390.
krotirianakis, I. G., & Floudas, C. A. (2004). Computational experiewith a new class of convex underestimators: Box-constrained NLPlems.Journal of Global Optimization, 29 (3), 249–264.
ndroulakis, I. P., & Floudas, C. A. (1998). Distributed branch and boalgorithms in global optimization. In P. M. Pardalos (Ed.),Parallel pro-cessing of discrete problems, volume106of IMAvolumes inmathemand its applications, Springer-Verlag. pp. 1–36.
anga, J. R., Balsa-Canto, E., Moles, C. G., & Alonso, A. A. (2003).proving food processing using modern optimization methods.Trends inFood Science and Technology, 14, 131–144.
anga, J. R., Moles, C. G., & Alonso, A. A. (2003). Global optimizaof bioprocesses using stochastic and hybrid methods. In C. A. Flo& P. M. Pardalos (Eds.),Frontiers in global optimization(pp. 45–70)Santorini, Greece: Kluwer Academic Publishers.
anga, J. R., Versyck, K. J., & Van Impe, J. F. (2002). Computatiooptimal identification experiments for nonlinear dynamic process mels: A stochastic global optimization approach.Industrial and ChemicaEngineering Research, 41, 2425–2430.
,
183.Dua, V., Bozinis, N. A., & Pistikopoulos, E. N. (2002). A multiparametric
programming approach for mixed-integer quadratic engineering prolems.Computers and Chemical Engineering, 26, 715–733.
Esposito, W. R., & Floudas, C. A. (1998). Global optimization in parameter estimation of nonlinear algebraic models via the error-in-variabapproach.Industrial andEngineeringChemistryResearch,35(5), 1841–1858.
Esposito, W. R., & Floudas, C. A. (2000a). Global optimization for thparameter estimation of differential-algebraic systems.Industrial andEngineering Chemistry Research, 39 (5), 1291–1310.
Esposito, W. R., & Floudas, C. A. (2000b). Deterministic global optimizatioin nonlinear optimal control problems.Journal of Global Optimization,17, 97–126.
Esposito, W. R., & Floudas, C. A. (2001). Comments on global optimizatifor the parameter estimation of differential algebraic systems.Industrialand Engineering Chemistry Research, 40, 490.
Esposito, W. R., & Floudas, C. A. (2002). Deterministic global optimizatioin isothermal reactor network synthesis.Journal of Global Optimization,22, 59–95.
Floudas, C. A. (2000a).Deterministic global optimization: Theory, methodsand applications. Nonconvex optimization and its applications. KluwerAcademic Publishers.
Floudas, C. A. (2000b). Global optimization in design and control of cheical process systems.Journal of Process Control, 10, 125.
Floudas, C. A., Gumus, Z. H., & Ierapetritou, M. G. (2001). Global optmization in design under uncertainty: Feasibility test and flexibility indeproblems.Industrial and Chemical Engineering Research, 40, 4267–4282.
Floudas, C. A., Klepeis, J. L., & Pardalos, P. M. (1999b). Global optimizatiapproaches in protein folding and peptide docking. In M. Farach-ColtoF. S. Roberts, M. Vingron, & M. Waterman (Eds.),DIMACS series indiscretemathematics and theoretical computer science, vol. 47(pp. 141–171).
Floudas, C. A., & Pardalos, P. M. (2000).Optimization in computationalchemistry and molecular biology. Nonconvex optimization and its appcations. Kluwer Academic Publishers.

1200 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
Floudas, C. A., & Pardalos, P. M. (2003).Frontiers in global optimization.Nonconvex optimization and its applications. Kluwer Academic Pub-lishers.
Floudas, C. A., Pardalos, P. M., Adjiman, C. S., Esposito, W. R., Gumus, Z.H., Harding, S. T., Klepeis, J. L., Meyer, C., & Schweiger, C. A. (1999).Handbook of test problems in local and global optimization. KluwerAcademic Publishers.
Gau, C. Y., Brennecke, J. F., & Stadtherr, M. A. (2000). Reliable nonlinearparameter estimation in VLE modeling.Fluid Phase Equilibria, 168,1–18.
Gau, C. Y., & Stadtherr, M. A. (2000). Reliable nonlinear parameter estima-tion using interval analysis: Error-in-variable approach.Computers andChemical Engineering, 24, 631–637.
Gau, C. Y., & Stadtherr, M. A. (2002a). Deterministic global optimiza-tion for error-in-variables parameter estimation.AIChE Journal, 48,1192.
Gau, C. Y., & Stadtherr, M. A. (2002b). Dynamic load balancing for par-allel interval-Newton using message passing.Computers and ChemicalEngineering, 26, 811–825.
Gau, C. Y., & Stadtherr, M. A. (2002c). New interval methodologies forreliable chemical modeling.Computers and Chemical Engineering, 26,827–840.
Goyal, V., & Ierapetritou, M. G. (2003a). Framework for evaluating thefeasibility/operability of nonconvex processes.AIChE Journal, 49 (5),1233–1240.
Goyal, V., & Ierapetritou, M. G. (2003b). MINLP optimization using sim-plicial approximation method for classes of non-convex problems. In C.A Floudas, & P. M. Pardalos (Eds.),Frontiers in global optimization(pp.165–196). Santorini, Greece: Kluwer Academic Publishers.
Grossmann, I. E., & Lee, S. (2003). Generalized convex disjunctive pro-gramming: Nonlinear convex hull relaxation.Computational Optimiza-
G ear
G ed-ci-
G iza-
H tions
H d re-
H 97).s.
H n-linearer-
H dingng
H l
H tationdels.
H terval
J ed on
Jones, D. R., Schonlau, M., & Welch, W. J. (1998). Efficient global optimiza-tion of expensive black-box functions.Journal of Global Optimization,13, 455.
Kallrath, J. (2003). Exact computation of global minima of a nonconvex port-folio optimization problem. In C. A. Floudas, & P. Pardalos (Eds.),Fron-tiers in global optimization(pp. 237–254). Santorini, Greece: KluwerAcademic Publishers.
Kesavan, P., Allgor, R. L., Gadzke, E. P., & Barton, P. (2004). Outer ap-proximation algorithms for separable nonconvex mixed-integer nonlin-ear problems.Mathematical Programming, 100(3), 517–535.
Kesavan, P., & Barton, P. (2000). Generalized branch-and-cut framework formixed-integer nonlinear optimization problems.Computers and Chem-ical Engineering, 24, 1361–1366.
Klepeis, J. L., Androulakis, I. P., Ierapetritou, M. G., & Floudas, C. A.(1998). Predicting solvated peptide conformations via global minimiza-tion of energetic atom-to-atom interactions.Computers and ChemicalEngineering, 22 (6), 765–788.
Klepeis, J. L., & Floudas, C. A. (1999a). A comparative study of globalminimum energy conformations of hydrated peptides.Journal of Com-putational Chemistry, 20 (6), 636.
Klepeis, J. L., & Floudas, C. A. (1999b). Free energy calculations for peptidesvia deterministic global optimization.Journal of Chemical Physics, 110(15), 7491.
Klepeis, J. L., & Floudas, C. A. (2003a). Ab initio tertiary structure predictionof proteins.Journal of Global Optimization, 25, 113.
Klepeis, J. L., & Floudas, C. A. (2003b). ASTRO-FOLD: A combinato-rial and global optimization framework for ab initio prediction of three-dimensional structures of proteins from the amino-acid sequence.Bio-physical Journal, 85, 2119.
Klepeis, J. L., Floudas, C. A., Morikis, D., & Lambris, J. D. (1999). Pre-dicting peptide structures using NMR data and deterministic global op-
K bridnte-
K bridnat-l
K 02).truc-ein–
L ear
mic
L on-ocess
L ner-Ap-ng
L ear
L ls of
L for
L -
L
tion and Applications, 26, 83–100.umus, Z. H., & Floudas, C. A. (2001). Global optimization of nonlin
bilevel programming problems.Journal of Global Optimization, 20, 1–31.
umus, Z. H., & Floudas, C. A. (in press). Global optimization of mixinteger bilevel programming problems.ComputationalManagementSence.
utmann, H. M. (2001). A radial basis function method for global optimtion. Journal of Global Optimization, 19, 201.
arding, S. T., & Floudas, C. A. (2000a). Phase stability with cubic equaof state: A global optimization approach.AIChE Journal, 46, 1422.
arding, S. T., & Floudas, C. A. (2000b). Locating heterogeneous anactive azeotropes.Industrial and Engineering Chemistry Research, 39,1576.
arding, S. T., Maranas, C. D., McDonald, C. M., & Floudas, C. A. (19Locating all homogeneous azeotropes in multicomponent mixtureIn-dustrial and Engineering Chemistry Research, 36 (1), 160–178.
arjunkoski, I., Westerlund, T., & Porn, R. (1999). Numerical and enviromental considerations on a complex industrial mixed integer nonprogramming (MINLP) problem.Computers and Chemical Engineing, 23, 1545–1561.
ertz, D., Adjiman, C. S., & Floudas, C. A. (1999). Two results on bounthe roots of interval polynomials.Computers andChemical Engineeri,23, 1333.
orst, R., Pardalos, P. M., & Thoai, N. V. (2000).Introduction to globaoptimization. Nonconvex optimization and its applications. Kluwer Aca-demic Publishers.
ua, J. Z., Brennecke, J. F., & Stadtherr, M. A. (1998a). Reliable compufor phase stability using interval analysis: Cubic equation of state moComputers and Chemical Engineering, 22 (9), 1207.
ua, J. Z., Brennecke, J. F., & Stadtherr, M. A. (1998b). Enhanced inanalysis for phase stability: Cubic equation of state models.Industrialand Engineering Chemistry Research, 37, 1519.
ones, D. R. (2001). A taxonomy of global optimization methods basresponse surfaces.Journal of Global Optimization, 21, 345.
timization.Journal of Computational Chemistry, 20, 1354.lepeis, J. L., Pieja, M., & Floudas, C. A. (2003a). A new class of hy
global optimization algorithms for peptide structure prediction: Igrated hybrids.Computer and Physics Communications, 151, 121.
lepeis, J. L., Pieja, M., & Floudas, C. A. (2003b). A new class of hyglobal optimization algorithms for peptide structure prediction: Altering hybrids and application to met-enkephalin and melittin.BiophysicaJournal, 84, 869.
lepeis, J. L., Schafroth, H. D., Westerberg, K. M., & Floudas, C. A. (20Deterministic global optimization and ab initio approaches for the sture prediction of polypeptides, dynamics of protein folding and protprotein interactions.Advances in Chemical Physics, 120, 266–457.
ee, C. K., & Barton, P. I. (2003). Global dynamic optimization of linhybrid systems. In C. A. Floudas, & P. M. Pardalos (Eds.),Frontiers inglobal optimization(pp. 289–312). Santorini, Greece: Kluwer AcadePublishers.
ee, A., & Grossmann, I. E. (2001). A global optimization algorithm for nconvex generalized disjunctive programming and applications to prsystems.Computers and Chemical Engineering, 25, 1675–1697.
ee, S., & Grossmann, I. E. (2003). Global optimization of nonlinear gealized disjunctive programming with bilinear equality constraints:plications to process networks.Computers and Chemical Engineeri,27, 1557–1575.
ee, C. K., Singer, A. B., & Barton, P. (2004). Global optimization of linhybrid systems with explicit transitions.Systems and Control Letters, 51(5), 363–375.
iberti, L., & Pantelides, C. C. (2003). Convex envelops of monomiaodd degree.Journal of Global Optimization, 25, 157–168.
in, X., Floudas, C. A., & Kallrath, J. (2004). Global solution approacha nonconvex MINLP problem in product portfolio optimization.Journalof Global Optimization.
ucia, A., & Feng, Y. (2002). Global terrain methods.Computers andChemical Engineering, 26, 529–546.
ucia, A., & Feng, Y. (2003). Multivariable terrain methods.AIChE Journal,49, 2553.

C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202 1201
Maier, R. W., Brennecke, J. F., & Stadtherr, M. A. (1998). Reliable compu-tation of homogeneous azeotropes.AIChE Journal, 44, 1745–1755.
McKinnon, K., & Mongeau, M. (1998). A generic global optimization algo-rithm for the chemical and phase equilibrium problem.Journal ofGlobalOptimization, 12, 325–351.
Meyer, C. A., & Floudas, C. A. (2003). Trilinear monomials with positiveor negative domains: Facets of convex and concave envelopes. In C. A.Floudas, & P. M. Pardalos (Eds.),Frontiers in global optimization(pp.327–352). Santorini, Greece: Kluwer Academic Publishers.
Meyer, C. A., & Floudas, C. A. (2004). Convex hull of trilinear monomialswith mixed-sign domains.Journal of Global Optimization,29, 125–155.
Meyer, C. A., & Floudas, C. A. (in press). Convex underestimation of twicecontinuously differentiable functions by piecewise quadratic perturba-tion: SplineαBB underestimators.Journal of Global Optimization.
Meyer, C. A., Floudas, C. A., & Neumaier, A. (2002). Global optimizationwith nonfactorable constraints.Industrial and Chemical EngineeringResearch, 41, 6413–6424.
Meyer, C. A., & Swartz, C. L. E. (1998). A regional convexity test for globaloptimization: Application to the phase equilibrium problem.Computersand Chemical Engineering, 22, 1407–1418.
Moles, C. G., Gutierrez, G., Alonso, A. A., & Banga, J. R. (2003). Inte-grated process design and control via global optimization.Industrialand Chemical Engineering, 81, 507–517.
Neumaier, A. (2004). Complete search in continuous global optimizationand constraint satisfaction. In A. Iserles (Ed.),Acta Numerica(Vol. 13,pp. 271–369). Cambridge University Press.
Noureldin, M. B., & El-Halwagi, M. (1999). Interval-based targeting forpollution prevention via mass integration.Computers and Chemical En-gineering, 23, 1527–1543.
Ostrovsky, G. M., Achenie, L. E. K., & Sinha, M. (2002). On the solutionof mixed-integer nonlinear programming models for computer aided
.O en-
d
P tion
P tionOCs.
P of. A.
P fer-al
P ingi-
R ear
R ive
S op-al
S tive
S g tobal
S bal-
Sherali, H. D., & Adams, W. P. (1999).A reformulation–linearization tech-nique for solving discrete and continuous nonconvex problems. Noncon-vex optimization and its applications. Kluwer Academic Publishers.
Singer, A. B., & Barton, P. (2004). Global solution of linear dynamic em-bedded optimization problems.Journal of Optimization, Theory and ItsApplications, 121(3), 613–646.
Singer, A. B., & Barton, P. I. (2003). Global solution of optimization prob-lems with dynamic systems embedded. In C. A. Floudas, & P. M. Parda-los (Eds.),Frontiers in global optimization(pp. 477–498). Santorini,Greece: Kluwer Academic Publishers.
Sinha, M., Achenie, L. E. K., & Gani, R. (2003). Blanket wash solvent blentdesign using interval analysis.Industrial and Engineering ChemistryResearch, 42, 516–527.
Sinha, M., Achenie, L., & Ostrovsky, G. V. (1999). Environmentally be-nign solvent design by global optimization.Computers and ChemicalEngineering, 23, 1381–1394.
Tardella, F. (2003). On the existence of polyhedral convex envelopes. In C.A. Floudas, & P. M. Pardalos (Eds.),Frontiers in global optimization(pp. 563–573). Santorini, Greece: Kluwer Academic Publishers.
Tawarmalani, M., Ahmed, S., & Sahinidis, N. V. (2002a). Product disag-gregation in global optimization and relaxations of rational programs.Journal of Global Optimization, 3, 281–303.
Tawarmalani, M., Ahmed, S., & Sahinidis, N. V. (2002b). Global optimiza-tion of 0–1 hyperbolic programs.Journal of Global Optimization, 24,385–416.
Tawarmalani, M., & Sahinidis, N. V. (2001). Semidefinite relaxations of frac-tional programs via novel convexification techniques.Journal of GlobalOptimization, 20, 137–158.
Tawarmalani, M., & Sahinidis, N. V. (2002). Convex extensions and envelopsof lower semi-continuous functions.Mathematical Programming, 93,247–263.
T haseg
T opti-
V ationlobal
V ally
V on-al
W n for
W p-
W tates
W ing:tetra-
W -lems.
X ationtate.
Y trolol
molecular design.Computers and Chemical Engineering, 26, 645–660strovsky, G. M., Achenie, L. E. K., & Sinha, M. (2003). A reduced dim
sion branch-and-bound algorithm for molecular design.Computers anChemical Engineering, 27, 551–567.
apamichail, I., & Adjiman, C. S. (2002). A rigorous global optimizaalgorithm for problems with ordinary differential equations.Journal ofGlobal Optimization, 24, 1–33.
arthasarathy, G., & El-Halwagi, M. (2000). Optimum mass integrastrategies for condensation and allocation of multicomponent VComputers and Chemical Engineering, 55, 881–895.
istikopoulos, E. N., Dua, V., & Ryu, J. (2003). Global optimizationbilevel programming problems via parametric programming. In CFloudas, & P. M. Pardalos (Eds.),Frontiers in global optimization(pp.457–476). Santorini, Greece: Kluwer Academic Publishers.
orn, R., Harjunkoski, I., & Westerlund, T. (1999). Convexification of difent classes of non-convex MINLP problems.Computers and ChemicEngineering, 23, 439–448.
orn, R., & Westerlund, T. (2000). A cutting plane method for minimizpseudo-convex functions in mixed integer case.Computers and Chemcal Engineering, 24, 2655–2665.
yoo, H. S., & Sahinidis, N. V. (2001). Analysis of bounds for multilinfunctions.Journal of Global Optimization, 19, 403–424.
yoo, H. S., & Sahinidis, N. V. (2003). Global optimization of multiplicatprograms.Journal of Global Optimization, 26, 387–418.
ahinidis, N. V., & Tawarmalani, M. (2000). Applications of globaltimization to process and molecular design.Computers and ChemicEngineering, 24, 2157–2169.
ahinidis, N. V., Tawarmalani, M., & Yu, M. (2003). Design of alternarefrigerants via global optimization.AIChE Journal, 49 (7), 1761.
chafroth, H. D., & Floudas, C. A. (2004). Predicting peptide bindinMHC pockets via molecular modelling, implicit solvation, and glooptimization.Proteins: Structure, Function and Bioinformatics,54, 534.
hectman, J. P., & Sahinidis, N. V. (1998). A finite algorithm for glooptimization of separable concave functions.Journal of Global Optimization, 12, 1–36.
essier, S. R., Brennecke, J. F., & Stadtherr, M. A. (2000). Reliable pstability analysis for excess Gibbs energy models.Chemical EngineerinScience, 55, 1785.
uy, H. (1998).Convex analysis and global optimization. Nonconvexmization and its applications. Kluwer Academic Publishers.
aia, A., & Sahinidis, N. V. (2003). Simultaneous parameter estimand model structure determination in FTIR spectroscopy by gMINLP optimization.Computers and Chemical Engineering, 27, 763–779.
an Antwerp, J. G., Braatz, R. A., & Sahinidis, N. V. (1999). Globoptimal robust process control.Journal of Process Control, 9, 375–383.
ecchietti, A., & Grossmann, I. E. (1999). LOGMIP: A disjunctive 0-1 nlinear optimizer for process systems models.Computers and ChemicEngineering, 23, 555–565.
ang, Y., & Achenie, L. E. K. (2002a). Computer aided solvent desigextractive fermentation.Fluid Phase Equilibria, 201, 1–18.
ang, Y., & Achenie, L. E. K. (2002b). A hybrid global optimization aproach for solvent design.Computers and Chemical Engineering, 26,1415–1425.
esterberg, K. M., & Floudas, C. A. (1999a). Locating all transition sand studying the reaction pathways of potential energy surfaces.Journalof Chemical Physics, 110(18), 9259.
esterberg, K. M., & Floudas, C. A. (1999b). Dynamics of peptide foldTransition states and reaction pathways of solvated and unsolvatedalanine.Journal of Global Optimization, 15, 261.
esterlund, T., Skrifvars, H., Harjunkoski, I., & Porn, R. (1998). An extended cutting plane method for a class of non-convex MINLP probComputers and Chemical Engineering, 22 (3), 357–365.
u, G., Brennecke, J. F., & Stadtherr, M. A. (2002). Reliable computof phase stability and equilibrium from the SAFT equation of sIndustrial and Engineering Chemistry Research, 41, 938.
amada, Y., & Hara, S. (1998). Global optimization for H-infinity conwith constant diagonal scaling.IEEETransactionsonAutomaticContr,43, 191–203.

1202 C.A. Floudas et al. / Computers and Chemical Engineering 29 (2005) 1185–1202
Zabinsky, Z. B. (2003).Stochastic adaptive search for global optimization.Nonconvex optimization and its applications. Kluwer Academic Pub-lishers.
Zamora, J. M., & Grossmann, I. E. (1998a). A global MINLP optimiza-tion algorithm for the synthesis of heat exchanger networks with nostream splits.Computers and Chemical Engineering, 22 (3), 367–384.
Zamora, J. M., & Grossmann, I. E. (1998b). Continuous global optimizationof structured process systems models.Computers and Chemical Engi-neering, 22 (12), 1749–1770.
Zamora, J. M., & Grossmann, I. E. (1999). A branch and contract algorithmfor problems with concave univariate, bilinear and linear fractional terms.Journal of Global Optimization, 14, 217–219.
Zhu, Y., & Inoue, K. (2001). Calculation of chemical and phase equilibriumbased on stability analysis by QBB algorithm: Application to NRTLequation.Chemical Engineering Science, 56, 6915.
Zhu, Y., & Kuno, T. (2003). Global optimization of nonconvex MINLP bya hybrid branch-and-bound and revised generalized benders decompo-
sition approach.Industrial and Engineering Chemistry Research, 42,528–539.
Zhu, Y., Wen, H., & Xu, Z. (2000). Global stability analysis and phaseequilibrium calculations at high pressures using the enhanced simulatedanneling algorithm.Chemical Engineering Science, 55, 3451.
Zhu, Y., & Xu, Z. (1999a). A reliable method for liquid–liquid phase equilib-rium calculation and global stability analysis.Computers and ChemicalEngineering, 176, 133–160.
Zhu, Y., & Xu, Z. (1999b). A reliable prediction of the global phase stabilityfor liquid–liquid equilibrium through the simulated anneling algorithm:Application to NRTL and UNIQUAC equations.Fluid PhaseEquilibria,154, 55–69.
Zhu, Y., & Xu, Z. (1999c). Lipschitz optimization for phase stability analysis:Application to Soave–Redlich–Kwong equation of state.Fluid PhaseEquilibria, 162, 19–29.
Zilinskas, J., & Bogle, I. D. L. (2003). Evaluation ranges of functions usingbalanced random interval arithmetic.Informatica Lithuan, 14 (3), 403–416.