FRACTIONAL HORSE POWER MOTORS
22
Submitted by:- Savaliya Jayesh R. 130960109033 Salakhna Keyur R. 130960109032 Submitted to:- ASSi.PRO.DHARMISTHA MAYANI
-
Upload
savaliya753 -
Category
Engineering
-
view
314 -
download
45
Transcript of FRACTIONAL HORSE POWER MOTORS

Submitted by:-
Savaliya Jayesh R.
130960109033
Salakhna Keyur R.
130960109032
Submitted to:-
ASSi.PRO.DHARMISTHA MAYANI

FRACTIONAL HORSE POWER MOTORS
Permanent Magnet Synchronous Motor
Reluctance Motor
Hysteresis Motor
Stepper Motor
Servo Motor
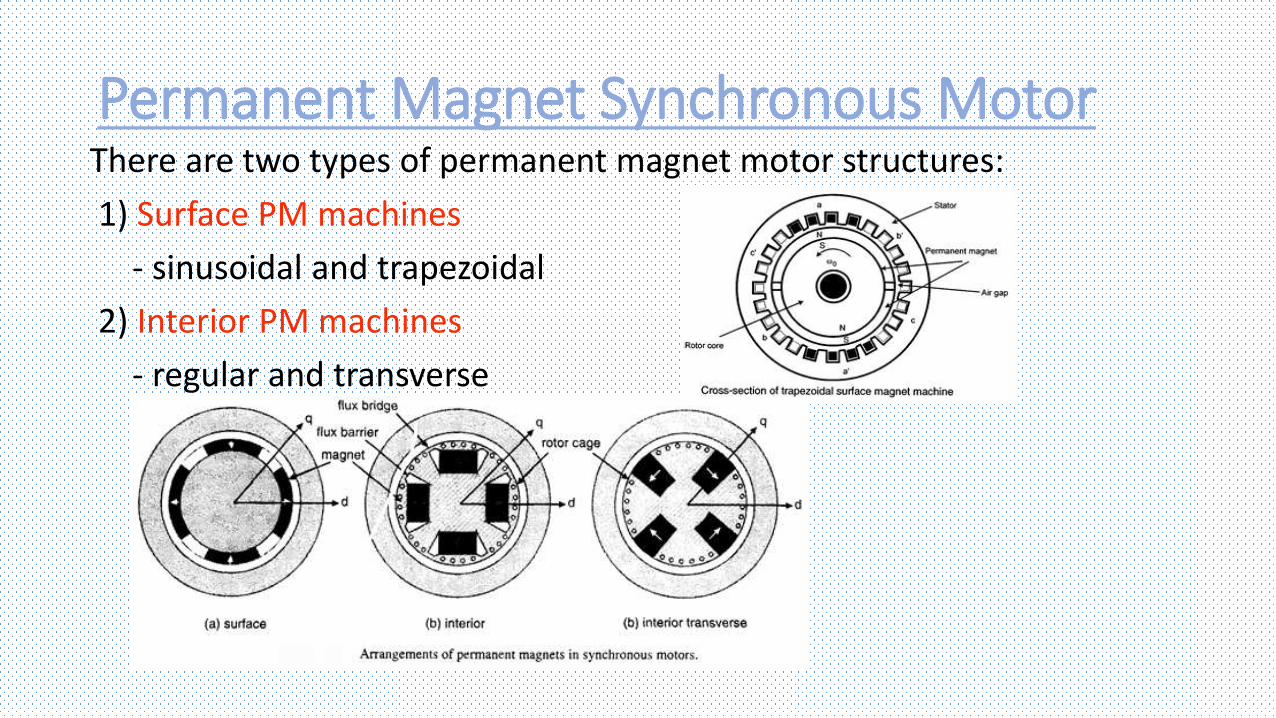
Permanent Magnet Synchronous MotorThere are two types of permanent magnet motor structures:
1) Surface PM machines
- sinusoidal and trapezoidal
2) Interior PM machines
- regular and transverse
PMSM Qualities
1. Operation is noise less
2. High power factor
3. better efficiency just a induction motor
kw rating 0.5 to 1.5 kw
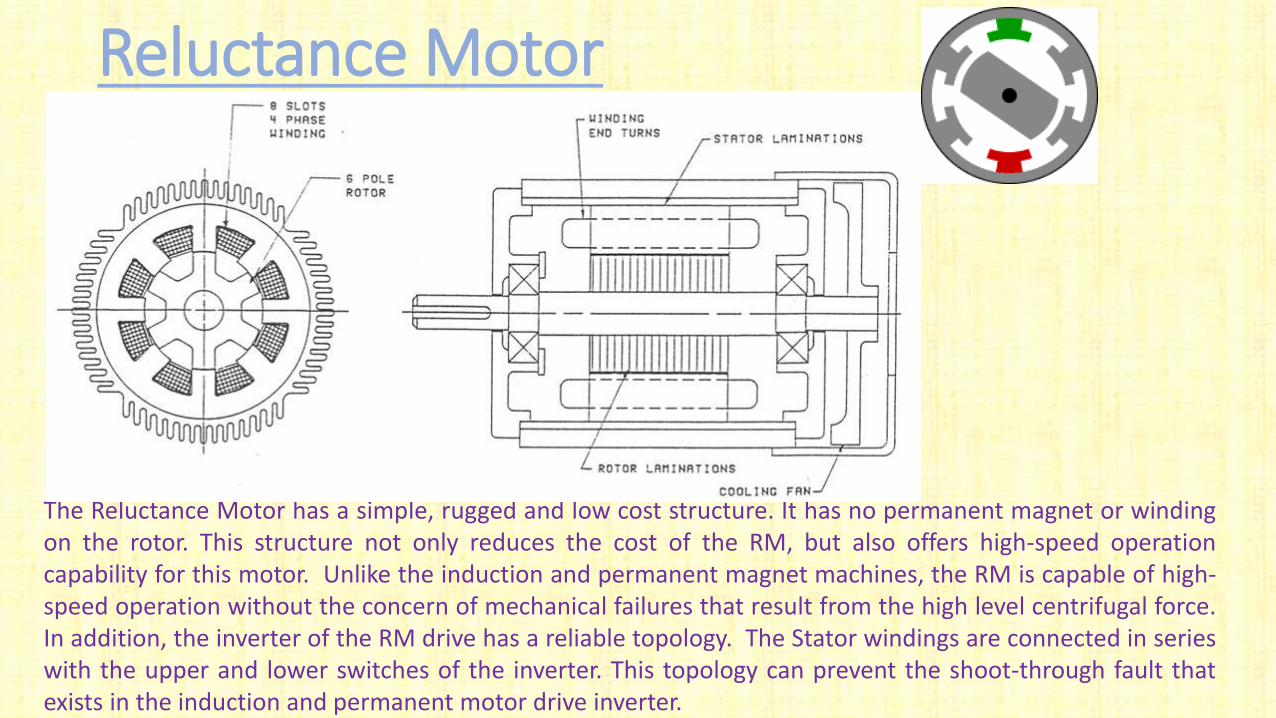
Reluctance Motor
The Reluctance Motor has a simple, rugged and low cost structure. It has no permanent magnet or windingon the rotor. This structure not only reduces the cost of the RM, but also offers high-speed operationcapability for this motor. Unlike the induction and permanent magnet machines, the RM is capable of high-speed operation without the concern of mechanical failures that result from the high level centrifugal force.In addition, the inverter of the RM drive has a reliable topology. The Stator windings are connected in serieswith the upper and lower switches of the inverter. This topology can prevent the shoot-through fault thatexists in the induction and permanent motor drive inverter.

Applications of RM
1. Analog electric meters.
2.Some washing machine designs.
3.Control rod drive mechanisms of nuclear reactors.
4. Hard disk drive motor.
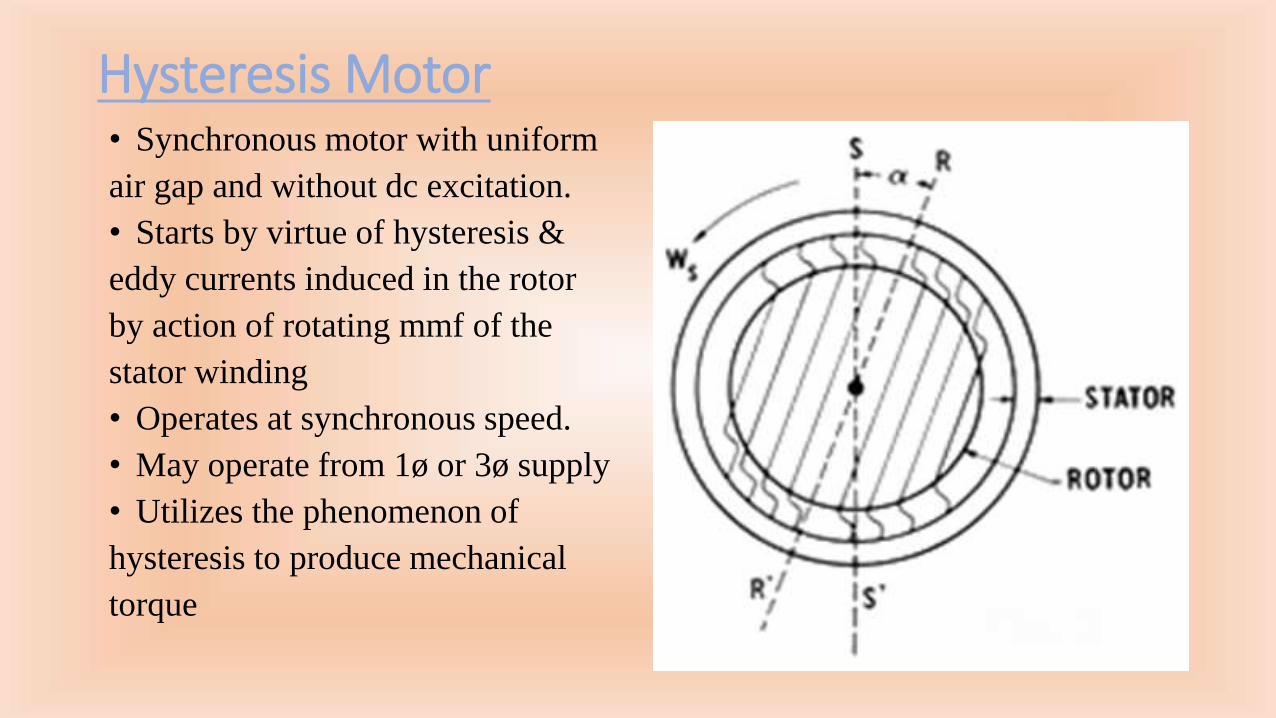
Hysteresis Motor• Synchronous motor with uniform
air gap and without dc excitation.
• Starts by virtue of hysteresis &
eddy currents induced in the rotor
by action of rotating mmf of the
stator winding
• Operates at synchronous speed.
• May operate from 1ø or 3ø supply
• Utilizes the phenomenon of
hysteresis to produce mechanical
torque

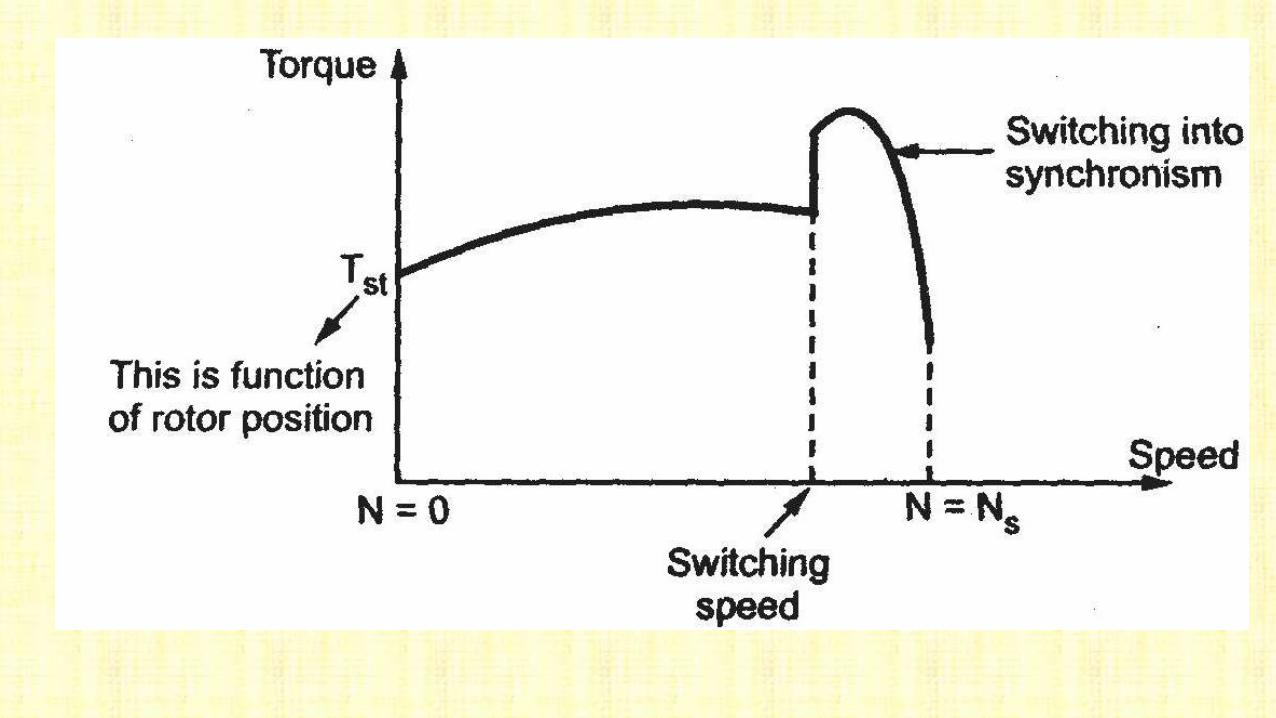
TORQUE-SPEED CHARACTERISTICS OF HYSTERESIS MOTOR
• The motor develops constant torqueright up to synchronous speed.
• Hysteresis motors can synchronize anyload they can accelerate, regardless ofthe inertia.
• After reaching synchronism the motorscontinue to run at synchronous speedand adjust their torque angle to developtorques required by the loads.
• Deviations from the ideal speed torquecurves.
*Curve A-when starting torque isnot required
*Curve B-when a high startingtorque is required.

Hysteresis Motor applications1. Indicating devices
2. Wall clocks
3. Teleprinters
4. Sound recording and reproducing apparatus
5. Timers.

STEPPER MOTOR
Rotor
Stator
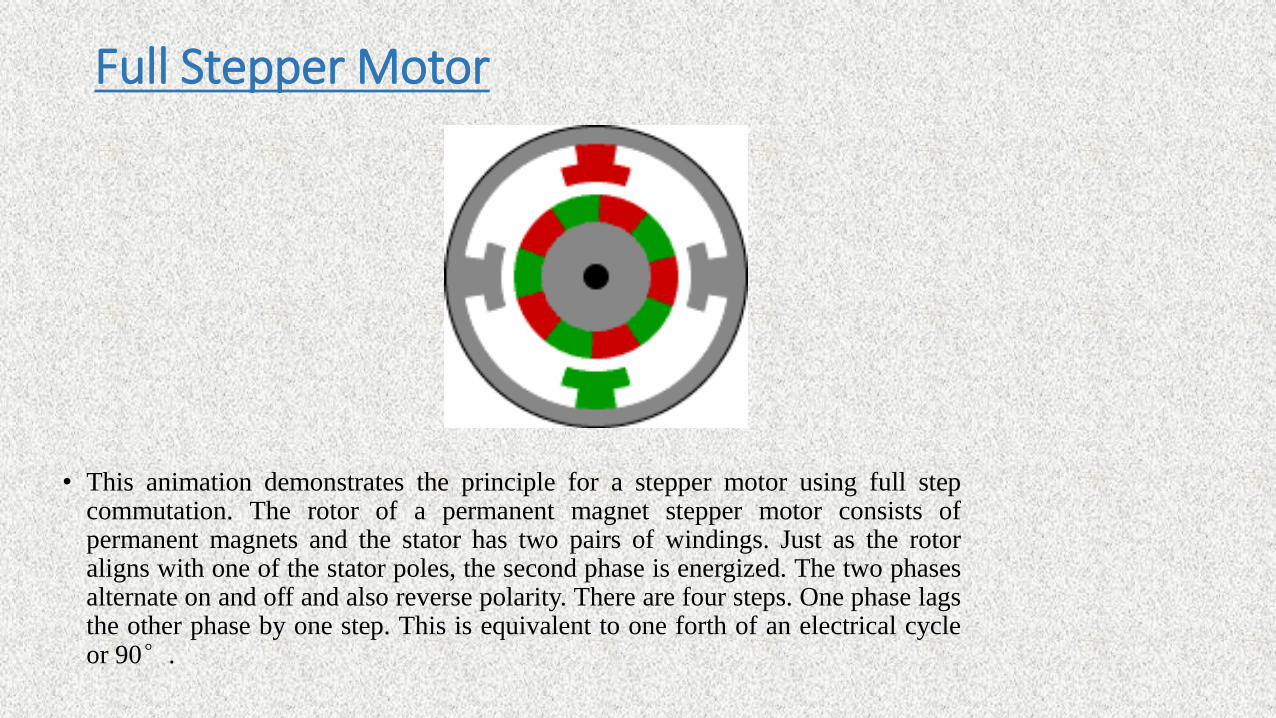
Full Stepper Motor
• This animation demonstrates the principle for a stepper motor using full stepcommutation. The rotor of a permanent magnet stepper motor consists ofpermanent magnets and the stator has two pairs of windings. Just as the rotoraligns with one of the stator poles, the second phase is energized. The two phasesalternate on and off and also reverse polarity. There are four steps. One phase lagsthe other phase by one step. This is equivalent to one forth of an electrical cycleor 90°.
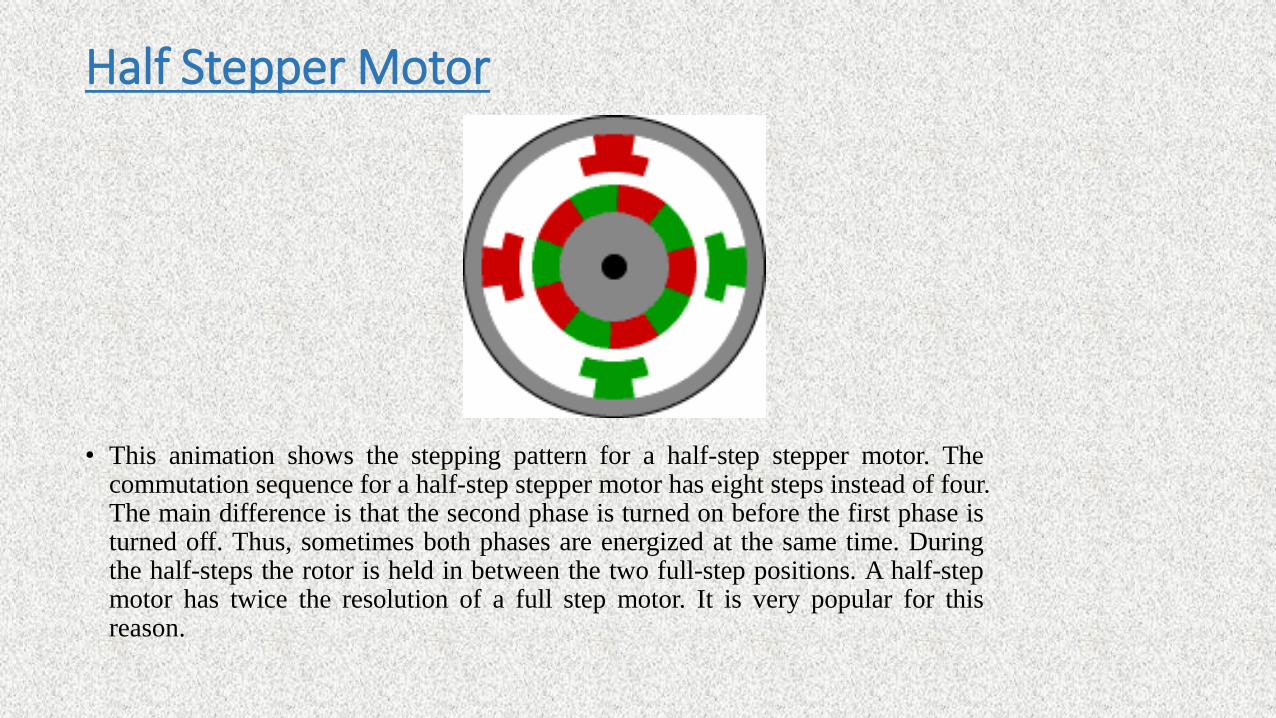
Half Stepper Motor
• This animation shows the stepping pattern for a half-step stepper motor. Thecommutation sequence for a half-step stepper motor has eight steps instead of four.The main difference is that the second phase is turned on before the first phase isturned off. Thus, sometimes both phases are energized at the same time. Duringthe half-steps the rotor is held in between the two full-step positions. A half-stepmotor has twice the resolution of a full step motor. It is very popular for thisreason.

STEPPER MOTOR
• Some stepper motor uses permanentmagnets. Some stepper motors do nothave magnets and instead use the basicprinciples of a switched reluctancemotor. The stator is similar but therotor is composed of a iron laminates.

SERVO MOTORTypical DC Servo Motor
DC motor
Gears
Feedback
controller
Housing
Servo vs. Stepper motor
• Servo Motors provide:
1. Higher rotational torque
2. Higher max RPM
3. Positive Feedback Control
• Stepper Motors provide:
1. Higher holding torque
2. More precise movement
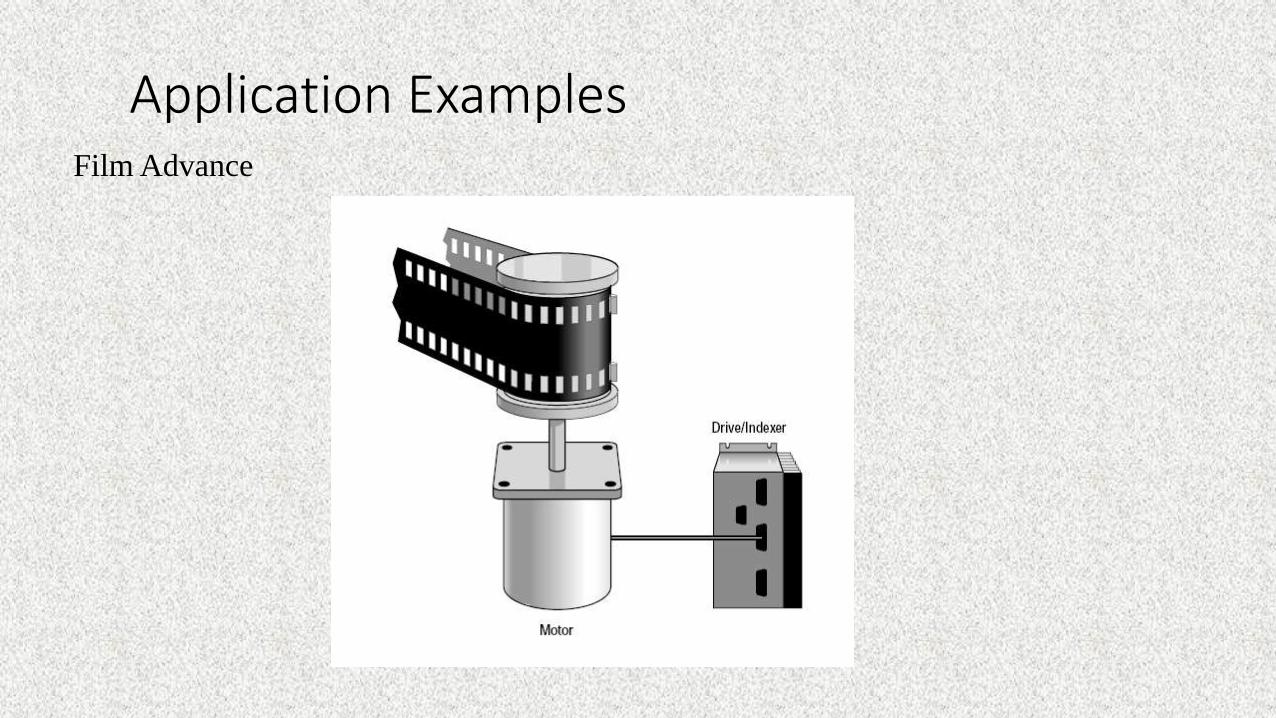
Application ExamplesFilm Advance

Telescope Drive

Labeling Machine
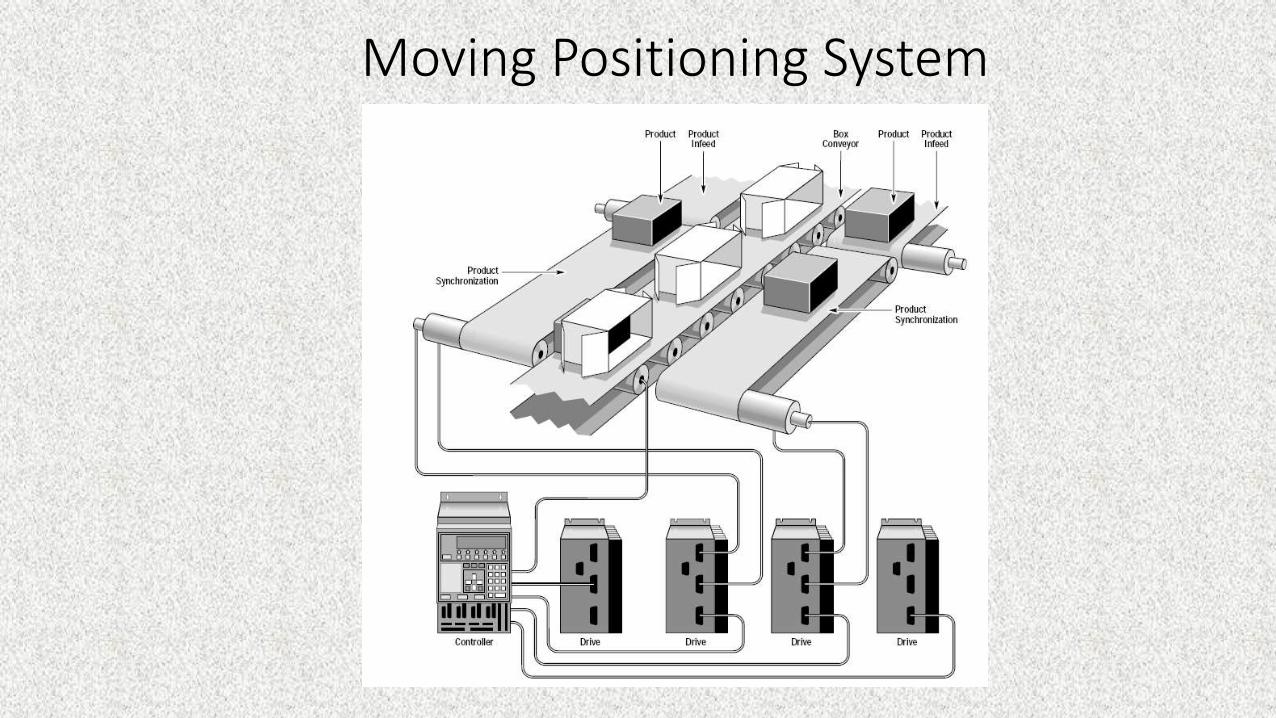
Moving Positioning System

Rotating Tube Cutter