
FPGA ASI INTELLIGENT ONTROL IMPLEMENTATION FOR … · FPGA basic intelligent ... through the...
30
FPGA BASIC INTELLIGENT CONTROL IMPLEMENTATION FOR HRRTCS Evelyn González-Hernández Dr. Gengis K. Toledo-Ramírez July 29, 2016
Transcript of FPGA ASI INTELLIGENT ONTROL IMPLEMENTATION FOR … · FPGA basic intelligent ... through the...

FPGA BASIC INTELLIGENT CONTROL IMPLEMENTATION FOR
HRRTCS
Evelyn González-Hernández
Dr. Gengis K. Toledo-Ramírez
July 29, 2016

FPGA basic intelligent control implementation for HRRTCS
Page 1 of 29
CONTENTS OBJETIVE.............................................................................................................................................. 1
BASIC CONCEPTS AND THEORY ........................................................................................................... 1
INTELLIGENT SYSTEMS .................................................................................................................... 1
ARTIFICIAL NEURAL NETWORK ....................................................................................................... 2
Background.................................................................................................................................. 3
History ......................................................................................................................................... 4
Employing artificial neural networks .......................................................................................... 6
Applications ................................................................................................................................. 6
PERCEPTRON ................................................................................................................................... 8
Definitions ................................................................................................................................... 9
Steps .......................................................................................................................................... 10
Convergence .............................................................................................................................. 10
FPGA .............................................................................................................................................. 11
ARTY .......................................................................................................................................... 12
VHDL .......................................................................................................................................... 14
PROJECT DEVELOPMENT ................................................................................................................... 15
IMPLEMENTATION OF PERCEPTRONS ........................................................................................... 18
RESULTS ............................................................................................................................................. 26
CONCLUSION ..................................................................................................................................... 27
ACKNOWLEDGMENTS ....................................................................................................................... 28
REFERENCES ...................................................................................................................................... 28
OBJETIVE This project is aimed to make a basic perceptron design in the FPGA DILIGENT ARTIX 7
through the software tool Vivado Design Suite in VHDL language, with the aim of laying the
foundation, tools and techniques for development with FPGAs in intelligent systems.
BASIC CONCEPTS AND THEORY
INTELLIGENT SYSTEMS An intelligent system is a machine with an embedded, Internet-connected computer that has
the capacity to gather and analyze data and communicate with other systems.
Requirements for an intelligent system include security, connectivity, the ability to adapt
according to current data and the capacity for remote monitoring and management.

FPGA basic intelligent control implementation for HRRTCS
Page 2 of 29
Essentially, an intelligent system is anything that contains a functional, although not usually
general-purpose, computer with Internet connectivity. An embedded system may be
powerful and capable of complex processing and data analysis, but it is usually specialized
for tasks relevant to the host machine.
Intelligent systems exist all around us in point-of-sale terminals, digital televisions, traffic
lights, smart meters, automobiles, digital signage and airplane controls, among a great
number of other possibilities. As this ongoing trend continues, many foresee a scenario
known as the Internet of Things, in which objects, animals and people can all be provided
with unique identifiers and the ability to automatically transfer data over a network without
requiring human-to-human or human-to-computer interaction.
ARTIFICIAL NEURAL NETWORK In machine learning and cognitive science, artificial neural networks (ANNs) are a family of
models inspired by biological neural networks (the central nervous systems of animals, in
particular the brain) which are used to estimate or approximate functions that can depend
on a large number of inputs and are generally unknown. Artificial neural networks are
typically specified using three things:
Architecture specifies what variables are involved in the network and their topological
relationships—for example the variables involved in a neural network might be the weights
of the connections between the neurons, along with activities of the neurons
Activity Rule Most neural network models have short time-scale dynamics: local rules define
how the activities of the neurons change in response to each other. Typically, the activity
rule depends on the weights (the parameters) in the network.
Learning Rule The learning rule specifies the way in which the neural network's weights
change with time. This learning is usually viewed as taking place on a longer time scale than
the time scale of the dynamics under the activity rule. Usually the learning rule will depend
on the activities of the neurons. It may also depend on the values of the target values
supplied by a teacher and on the current value of the weights.
For example, a neural network for handwriting recognition is defined by a set of input
neurons which may be activated by the pixels of an input image. After being weighted and
transformed by a function (determined by the network's designer), the activations of these
neurons are then passed on to other neurons. This process is repeated until finally, the
output neuron that determines which character was read is activated.
Like other machine learning methods – systems that learn from data – neural networks have
been used to solve a wide variety of tasks, like computer vision and speech recognition, that
are hard to solve using ordinary rule-based programming.

FPGA basic intelligent control implementation for HRRTCS
Page 3 of 29
Figure 1 Artificial Neural Network
Background
Examinations of humans' central nervous systems inspired the concept of artificial neural
networks. In an artificial neural network, simple artificial nodes, known as "neurons",
"neurodes", "processing elements" or "units", are connected together to form a network
which mimics a biological neural network.
There is no single formal definition of what an artificial neural network is. However, a class
of statistical models may commonly be called "neural" if it possesses the following
characteristics:
1. contains sets of adaptive weights, i.e. numerical parameters that are tuned by a
learning algorithm, and
2. is capable of approximating non-linear functions of their inputs.
The adaptive weights can be thought of as connection strengths between neurons, which
are activated during training and prediction.
Artificial neural networks are similar to biological neural networks in the performing by its
units of functions collectively and in parallel, rather than by a clear delineation of subtasks
to which individual units are assigned. The term "neural network" usually refers to models
employed in statistics, cognitive psychology and artificial intelligence. Neural network
models which command the central nervous system and the rest of the brain are part of
theoretical neuroscience and computational neuroscience.
In modern software implementations of artificial neural networks, the approach inspired by
biology has been largely abandoned for a more practical approach based on statistics and

FPGA basic intelligent control implementation for HRRTCS
Page 4 of 29
signal processing. In some of these systems, neural networks or parts of neural networks (like
artificial neurons) form components in larger systems that combine both adaptive and non-
adaptive elements. While the more general approach of such systems is more suitable for
real-world problem solving, it has little to do with the traditional, artificial intelligence
connectionist models. What they do have in common, however, is the principle of non-linear,
distributed, parallel and local processing and adaptation. Historically, the use of neural
network models marked a directional shift in the late eighties from high-level (symbolic)
artificial intelligence, characterized by expert systems with knowledge embodied in if-then
rules, to low-level (sub-symbolic) machine learning, characterized by knowledge embodied
in the parameters of a dynamical system.
History
Warren McCulloch and Walter Pitts (1943) created a computational model for neural
networks based on mathematics and algorithms called threshold logic. This model paved the
way for neural network research to split into two distinct approaches. One approach focused
on biological processes in the brain and the other focused on the application of neural
networks to artificial intelligence.
In the late 1940s psychologist Donald Hebb created a hypothesis of learning based on the
mechanism of neural plasticity that is now known as Hebbian learning. Hebbian learning is
considered to be a 'typical' unsupervised learning rule and its later variants were early
models for long term potentiation. Researchers started applying these ideas to
computational models in 1948 with Turing's B-type machines.
Farley and Wesley A. Clark (1954) first used computational machines, then called
"calculators," to simulate a Hebbian network at MIT. Other neural network computational
machines were created by Rochester, Holland, Habit, and Duda (1956).
Frank Rosenblatt (1958) created the perceptron, an algorithm for pattern recognition based
on a two-layer computer learning network using simple addition and subtraction. With
mathematical notation, Rosenblatt also described circuitry not in the basic perceptron, such
as the exclusive-or circuit, a circuit which could not be processed by neural networks until
after the backpropagation algorithm was created by Paul Werbos (1975).
Neural network research stagnated after the publication of machine learning research by
Marvin Minsky and Seymour Papert (1969), who discovered two key issues with the
computational machines that processed neural networks. The first was that basic
perceptrons were incapable of processing the exclusive-or circuit. The second significant
issue was that computers didn't have enough processing power to effectively handle the long
run time required by large neural networks. Neural network research slowed until computers
achieved greater processing power.
FPGA basic intelligent control implementation for HRRTCS
Page 5 of 29
A key advance that came later was the backpropagation algorithm which effectively solved
the exclusive-or problem, and more generally the problem of quickly training multi-layer
neural networks (Werbos 1975).
In the mid-1980s, parallel distributed processing became popular under the name
connectionism. The textbook by David E. Rumelhart and James McClelland (1986) provided
a full exposition of the use of connectionism in computers to simulate neural processes.
Neural networks, as used in artificial intelligence, have traditionally been viewed as simplified
models of neural processing in the brain, even though the relation between this model and
the biological architecture of the brain is debated; it's not clear to what degree artificial
neural networks mirror brain function.
Support vector machines and other, much simpler methods such as linear classifiers
gradually overtook neural networks in machine learning popularity. But the advent of deep
learning in the late 2000s sparked renewed interest in neural networks.
Computational devices have been created in CMOS, for both biophysical simulation and
neuromorphic computing. More recent efforts show promise for creating nanodevices for
very large scale principal components analyses and convolution. If successful, would create
a new class of neural computing because it depends on learning rather than programming
and because it is fundamentally analog rather than digital even though the first instantiations
may in fact be with CMOS digital devices.
Between 2009 and 2012, the recurrent neural networks and deep feedforward neural
networks developed in the research group of Jürgen Schmidhuber at the Swiss AI Lab IDSIA
have won eight international competitions in pattern recognition and machine learning. For
example, the bi-directional and multi-dimensional long short term memory (LSTM) of Alex
Graves et al. won three competitions in connected handwriting recognition at the 2009
International Conference on Document Analysis and Recognition (ICDAR), without any prior
knowledge about the three different languages to be learned.
Fast GPU-based implementations of this approach by Dan Ciresan and colleagues at IDSIA
have won several pattern recognition contests, including the IJCNN 2011 Traffic Sign
Recognition Competition, the ISBI 2012 Segmentation of Neuronal Structures in Electron
Microscopy Stacks challenge, and others. Their neural networks also were the first artificial
pattern recognizers to achieve human-competitive or even superhuman performance on
important benchmarks such as traffic sign recognition (IJCNN 2012), or the MNIST
handwritten digits’ problem of Yann LeCun at NYU.
Deep, highly nonlinear neural architectures similar to the 1980 neocognitron by Kunihiko
Fukushima and the "standard architecture of vision", inspired by the simple and complex
cells identified by David H. Hubel and Torsten Wiesel in the primary visual cortex, can also be
pre-trained by unsupervised methods of Geoff Hinton's lab at University of Toronto. A team

FPGA basic intelligent control implementation for HRRTCS
Page 6 of 29
from this lab won a 2012 contest sponsored by Merck to design software to help find
molecules that might lead to new drugs.
Employing artificial neural networks
Perhaps the greatest advantage of ANNs is their ability to be used as an arbitrary function
approximation mechanism that 'learns' from observed data. However, using them is not so
straightforward, and a relatively good understanding of the underlying theory is essential.
Choice of model: This will depend on the data representation and the application. Overly
complex models tend to lead to challenges in learning.
Learning algorithm: There are numerous trade-offs between learning algorithms. Almost any
algorithm will work well with the correct hyperparameters for training on a particular fixed
data set. However, selecting and tuning an algorithm for training on unseen data require a
significant amount of experimentation.
Robustness: If the model, cost function and learning algorithm are selected appropriately,
the resulting ANN can be extremely robust.
With the correct implementation, ANNs can be used naturally in online learning and large
data set applications. Their simple implementation and the existence of mostly local
dependencies exhibited in the structure allows for fast, parallel implementations in
hardware.
Applications
The utility of artificial neural network models lies in the fact that they can be used to infer a
function from observations. This is particularly useful in applications where the complexity
of the data or task makes the design of such a function by hand impractical.
Real-life applications
The tasks artificial neural networks are applied to tend to fall within the following
broad categories:
Function approximation, or regression analysis, including time series prediction,
fitness approximation and modeling
Classification, including pattern and sequence recognition, novelty detection and
sequential decision making
Data processing, including filtering, clustering, blind source separation and
compression
Robotics, including directing manipulators, prosthesis.
Control, including Computer numerical control

FPGA basic intelligent control implementation for HRRTCS
Page 7 of 29
Application areas include the system identification and control (vehicle control, trajectory
prediction, process control, natural resources management), quantum chemistry, game-
playing and decision making (backgammon, chess, poker), pattern recognition (radar
systems, face identification, object recognition and more), sequence recognition (gesture,
speech, handwritten text recognition), medical diagnosis, financial applications (e.g.
automated trading systems), data mining (or knowledge discovery in databases, "KDD"),
visualization and e-mail spam filtering.
Artificial neural networks have also been used to diagnose several cancers. An ANN based
hybrid lung cancer detection system named HLND improves the accuracy of diagnosis and
the speed of lung cancer radiology. These networks have also been used to diagnose prostate
cancer. The diagnoses can be used to make specific models taken from a large group of
patients compared to information of one given patient. The models do not depend on
assumptions about correlations of different variables. Colorectal cancer has also been
predicted using the neural networks. Neural networks could predict the outcome for a
patient with colorectal cancer with more accuracy than the current clinical methods. After
training, the networks could predict multiple patient outcomes from unrelated institutions.
Neural networks and neuroscience
Theoretical and computational neuroscience is the field concerned with the theoretical
analysis and the computational modeling of biological neural systems. Since neural systems
are intimately related to cognitive processes and behavior, the field is closely related to
cognitive and behavioral modeling.
The aim of the field is to create models of biological neural systems in order to understand
how biological systems work. To gain this understanding, neuroscientists strive to make a
link between observed biological processes (data), biologically plausible mechanisms for
neural processing and learning (biological neural network models) and theory (statistical
learning theory and information theory).
Types of models
Many models are used in the field, defined at different levels of abstraction and modeling
different aspects of neural systems. They range from models of the short-term behavior of
individual neurons, models of how the dynamics of neural circuitry arise from interactions
between individual neurons and finally to models of how behavior can arise from abstract
neural modules that represent complete subsystems. These include models of the long-term,
and short-term plasticity, of neural systems and their relations to learning and memory from
the individual neuron to the system level.
Memory networks
Integrating external memory components with artificial neural networks has a long history
dating back to early research in distributed representations and self-organizing maps. E.g. in
sparse distributed memory the patterns encoded by neural networks are used as memory

FPGA basic intelligent control implementation for HRRTCS
Page 8 of 29
addresses for content-addressable memory, with "neurons" essentially serving as address
encoders and decoders.
More recently deep learning was shown to be useful in semantic hashing where a deep
graphical model of the word-count vectors is obtained from a large set of documents.
Documents are mapped to memory addresses in such a way that semantically similar
documents are located at nearby addresses. Documents similar to a query document can
then be found by simply accessing all the addresses that differ by only a few bits from the
address of the query document.
Neural Turing Machines developed by Google DeepMind extend the capabilities of deep
neural networks by coupling them to external memory resources, which they can interact
with by attentional processes. The combined system is analogous to a Turing Machine but is
differentiable end-to-end, allowing it to be efficiently trained with gradient descent.
Preliminary results demonstrate that Neural Turing Machines can infer simple algorithms
such as copying, sorting, and associative recall from input and output examples.
Memory Networks is another extension to neural networks incorporating long-term memory
which was developed by Facebook research. The long-term memory can be read and written
to, with the goal of using it for prediction. These models have been applied in the context of
question answering (QA) where the long-term memory effectively acts as a (dynamic)
knowledge base, and the output is a textual response.
PERCEPTRON In machine learning, the perceptron is an algorithm for supervised learning of binary
classifiers: functions that can decide whether an input (represented by a vector of numbers)
belongs to one class or another. It is a type of linear classifier, a classification algorithm that
makes its predictions based on a linear predictor function combining a set of weights with
the feature vector. The algorithm allows for online learning; in that it processes elements in
the training set one at a time.
The perceptron algorithm dates back to the late 1950s; its first implementation, in custom
hardware, was one of the first artificial neural networks to be produced.
In the modern sense, the perceptron is an algorithm for learning a binary classifier: a function
that maps its input 𝑥 (a real-valued vector) to an output value 𝑓(𝑥) (a single binary value):
𝑓(𝑥) = {1 𝑖𝑓 𝑤 ∙ 𝑥 + 𝑏 > 00 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
where 𝑤 is a vector of real-valued weights, 𝑤 ∙ 𝑥 is the dot product ∑ 𝑤𝑖𝑚𝑖=0 𝑥𝑖, where 𝑚 is
the number of inputs to the perceptron and 𝑏 is the bias. The bias shifts the decision
boundary away from the origin and does not depend on any input value.

FPGA basic intelligent control implementation for HRRTCS
Page 9 of 29
The value of 𝑓(𝑥) (0 or 1) is used to classify 𝑥 as either a positive or a negative instance, in
the case of a binary classification problem. If 𝑏 is negative, then the weighted combination
of inputs must produce a positive value greater than |𝑏| in order to push the classifier neuron
over the 0 threshold. Spatially, the bias alters the position (though not the orientation) of the
decision boundary. The perceptron learning algorithm does not terminate if the learning set
is not linearly separable. If the vectors are not linearly separable learning will never reach a
point where all vectors are classified properly. The most famous example of the perceptron's
inability to solve problems with linearly nonseparable vectors is the Boolean exclusive-or
problem. The solution spaces of decision boundaries for all binary functions and learning
behaviors are studied in the reference.
In the context of neural networks, a perceptron is an artificial neuron using the Heaviside
step function as the activation function. The perceptron algorithm is also termed the single-
layer perceptron, to distinguish it from a multilayer perceptron, which is a misnomer for a
more complicated neural network. As a linear classifier, the single-layer perceptron is the
simplest feedforward neural network.
Consider the AND and OR functions, these functions are linearly separable and therefore can
be learned by a perceptron.
Below is an example of a learning algorithm for a (single-layer) perceptron. For multilayer
perceptrons, where a hidden layer exists, more sophisticated algorithms such as
backpropagation must be used. Alternatively, methods such as the delta rule can be used if
the function is non-linear and differentiable, although the one below will work as well.
When multiple perceptrons are combined in an artificial neural network, each output neuron
operates independently of all the others; thus, learning each output can be considered in
isolation.
Definitions
We first define some variables:
𝑦 = 𝑓(𝑧) denotes the output from the perceptron for an input vector 𝑧.
𝐷 = {(𝑥1, 𝑑1), … , (𝑥𝑠, 𝑑𝑠)} is the training set of 𝑠 samples, where:

FPGA basic intelligent control implementation for HRRTCS
Page 10 of 29
o 𝑥𝑗 is the 𝑛 dimensional input vector.
o 𝑑𝑗 is the desired output value of the perceptron for that input.
We show the values of the features as follows:
𝑥𝑗,𝑖 is the value of the 𝑖th feature on the 𝑗th training input vector.
𝑥𝑗,0=1.
To represent the weights:
𝑤𝑖 is the 𝑖th value in the weight vector, to be multiplied by the value of the 𝑖th input
feature.
Because 𝑥𝑗,0=1, the 𝑤0 is effectively a learned bias that we use instead of the bias
constant 𝑏.
To show the time-dependence of 𝑤, we use:
𝑤𝑖(𝑡) is the weight 𝑖 at time 𝑡.
Unlike other linear classification algorithms such as logistic regression, there is no need for a
learning rate in the perceptron algorithm. This is because multiplying the update by any
constant simply rescales the weights but never changes the sign of the prediction.
Steps
1. Initialize the weights and the threshold. Weights may be initialized to 0 or to a small
random value. In the example below, we use 0.
2. For each example 𝑗 in our training set 𝐷, perform the following steps over the input
𝑥𝑗 and desired output 𝑑𝑗:
a. Calculate the actual output:
𝑦𝑗(𝑡) = 𝑓[𝑤(𝑡) ∙ 𝑥𝑗]
= 𝑓[𝑤0(𝑡)𝑥𝑗,0 + 𝑤1(𝑡)𝑥𝑗,1 + 𝑤2(𝑡)𝑥𝑗,2+. . . +𝑤𝑛(𝑡)𝑥𝑗,𝑛]
b. Update the weights:
𝑤𝑖(𝑡 + 1) = 𝑤𝑖(𝑡) + (𝑑𝑗 − 𝑦𝑗(𝑡))𝑥𝑗,𝑖, for all features 0 ≤ 𝑖 ≤ 𝑛.
3. For offline learning, the step 2 may be repeated until the iteration error 1
𝑠∑ |𝑑𝑗 − 𝑦𝑗(𝑡)|𝑠
𝑗=1 is less than a user-specified error threshold 𝛾, or a predetermined
number of iterations have been completed.
The algorithm updates the weights after steps 2a and 2b. These weights are immediately
applied to a pair in the training set, and subsequently updated, rather than waiting until all
pairs in the training set have undergone these steps.
Convergence
The perceptron is a linear classifier, therefore it will never get to the state with all the input
vectors classified correctly if the training set 𝐷 is not linearly separable, if the positive

FPGA basic intelligent control implementation for HRRTCS
Page 11 of 29
examples cannot be separated from the negative examples by a hyperplane. In this case, no
"approximate" solution will be gradually approached under the standard learning algorithm,
but instead learning will fail completely. Hence, if linear separability of the training set is not
known a priori, one of the training variants below should be used.
But if the training set is linearly separable, then the perceptron is guaranteed to converge,
and there is an upper bound on the number of times the perceptron will adjust its weights
during the training.
Suppose that the input vectors from the two classes can be separated by a hyperplane with
a margin 𝛾 there exists a weight vector 𝑤, ‖𝑤‖ = 1, and a bias term 𝑏 such that 𝑤 ∙ 𝑥𝑗 > 𝛾
for all 𝑗: 𝑑𝑗 = 1 and 𝑤 ∙ 𝑥𝑗 < −𝛾 for all 𝑗: 𝑑𝑗 = 0. And also let 𝑅 denote the maximum norm
of an input vector. Novikoff (1962) proved that in this case the perceptron algorithm
converges after making 𝑂(𝑅2/𝛾2)updates. The idea of the proof is that the weight vector is
always adjusted by a bounded amount in a direction that it has a negative dot product with,
and thus can be bounded above by 𝑂(√𝑡) where 𝑡 is the number of changes to the weight
vector. But it can also be bounded below by 𝑂(𝑡) because if there exists an (unknown)
satisfactory weight vector, then every change makes progress in this (unknown) direction by
a positive amount that depends only on the input vector.
While the perceptron algorithm is guaranteed to converge on some solution in the case of a
linearly separable training set, it may still pick any solution and problems may admit many
solutions of varying quality. The perceptron of optimal stability, nowadays better known as
the linear support vector machine, was designed to solve this problem.
Figure 2 The appropriate weights are applied to the inputs, and the resulting weighted sum passed to a function that produces the output o.
FPGA A field-programmable gate array (FPGA) is an integrated circuit designed to be configured by
a customer or a designer after manufacturing hence "field-programmable". The FPGA

FPGA basic intelligent control implementation for HRRTCS
Page 12 of 29
configuration is generally specified using a hardware description language (HDL), similar to
that used for an application-specific integrated circuit (ASIC). (Circuit diagrams were
previously used to specify the configuration, as they were for ASICs, but this is increasingly
rare.)
FPGAs contain an array of programmable logic blocks, and a hierarchy of reconfigurable
interconnects that allow the blocks to be "wired together", like many logic gates that can be
inter-wired in different configurations. Logic blocks can be configured to perform complex
combinational functions, or merely simple logic gates like AND and XOR. In most FPGAs, logic
blocks also include memory elements, which may be simple flip-flops or more complete
blocks of memory.
An FPGA can be used to solve any problem which is computable. This is trivially proven by
the fact FPGA can be used to implement a soft microprocessor. Their advantage lies in that
they are sometimes significantly faster for some applications because of their parallel nature
and optimality in terms of the number of gates used for a certain process.
Specific applications of FPGAs include digital signal processing, software-defined radio, ASIC
prototyping, medical imaging, computer vision, speech recognition, cryptography,
bioinformatics, computer hardware emulation, radio astronomy, metal detection and a
growing range of other areas.
ARTY
Arty is a ready-to-use development platform designed around the Artix-7™ Field
Programmable Gate Array (FPGA) from Xilinx. It was designed specifically for use as a
MicroBlaze Soft Processing System. When used in this context, Arty becomes the most
flexible processing platform you could hope to add to your collection, capable of adapting to
whatever your project requires. Unlike other Single Board Computers, Arty isn't bound to a
single set of processing peripherals: One moment it's a communication powerhouse chock-
full of UARTs, SPIs, IICs, and an Ethernet MAC, and the next it's a meticulous timekeeper with
a dozen 32-bit timers.
FPGA basic intelligent control implementation for HRRTCS
Page 13 of 29
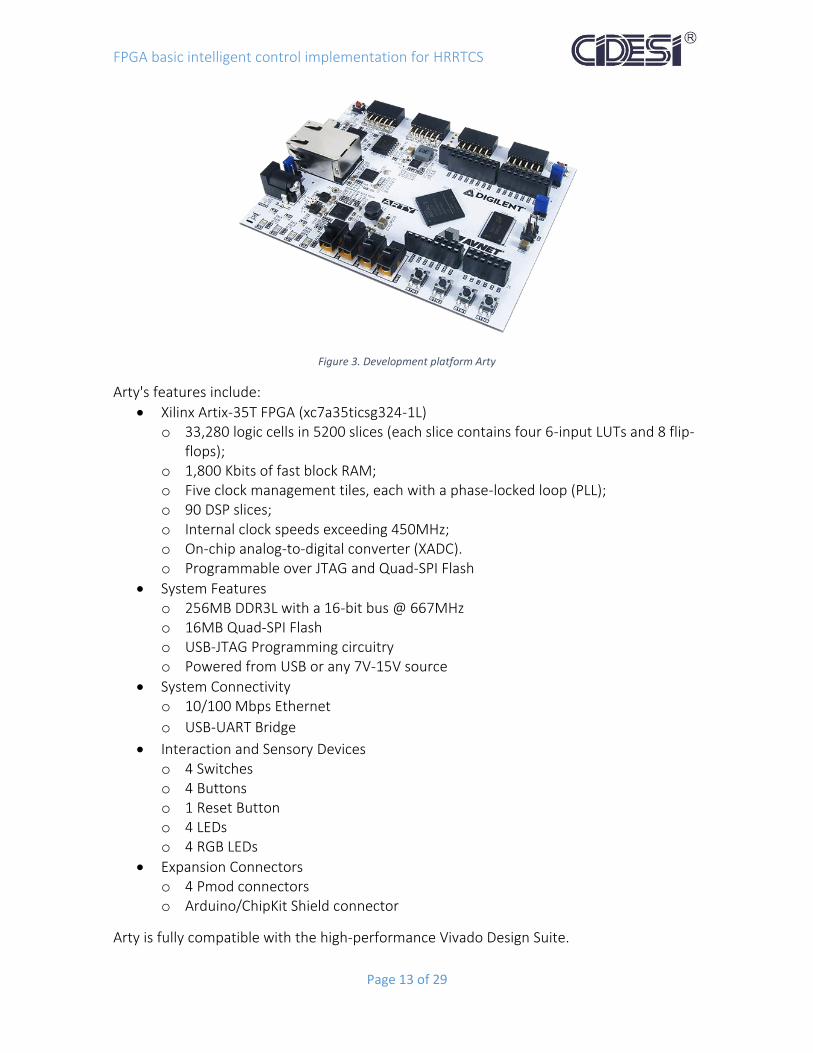
Figure 3. Development platform Arty
Arty's features include:
Xilinx Artix-35T FPGA (xc7a35ticsg324-1L) o 33,280 logic cells in 5200 slices (each slice contains four 6-input LUTs and 8 flip-
flops); o 1,800 Kbits of fast block RAM; o Five clock management tiles, each with a phase-locked loop (PLL); o 90 DSP slices; o Internal clock speeds exceeding 450MHz; o On-chip analog-to-digital converter (XADC). o Programmable over JTAG and Quad-SPI Flash
System Features o 256MB DDR3L with a 16-bit bus @ 667MHz o 16MB Quad-SPI Flash o USB-JTAG Programming circuitry o Powered from USB or any 7V-15V source
System Connectivity o 10/100 Mbps Ethernet
o USB-UART Bridge
Interaction and Sensory Devices o 4 Switches o 4 Buttons o 1 Reset Button o 4 LEDs o 4 RGB LEDs
Expansion Connectors o 4 Pmod connectors o Arduino/ChipKit Shield connector
Arty is fully compatible with the high-performance Vivado Design Suite.

FPGA basic intelligent control implementation for HRRTCS
Page 14 of 29
VHDL
VHDL (VHSIC Hardware Description Language) is a hardware description language used in
electronic design automation to describe digital and mixed-signal systems such as field-
programmable gate arrays and integrated circuits. VHDL can also be used as a general
purpose parallel programming language.
Design
VHDL is commonly used to write text models that describe a logic circuit. Such a model is
processed by a synthesis program, only if it is part of the logic design. A simulation program
is used to test the logic design using simulation models to represent the logic circuits that
interface to the design. This collection of simulation models is commonly called a testbench.
VHDL has constructs to handle the parallelism inherent in hardware designs, but these
constructs (processes) differ in syntax from the parallel constructs in Ada (tasks). Like Ada,
VHDL is strongly typed and is not case sensitive. In order to directly represent operations
which are common in hardware, there are many features of VHDL which are not found in
Ada, such as an extended set of Boolean operators including nand and nor. VHDL also allows
arrays to be indexed in either ascending or descending direction; both conventions are used
in hardware, whereas in Ada and most programming languages only ascending indexing is
available.
VHDL has file input and output capabilities, and can be used as a general-purpose language
for text processing, but files are more commonly used by a simulation testbench for stimulus
or verification data. There are some VHDL compilers which build executable binaries. In this
case, it might be possible to use VHDL to write a testbench to verify the functionality of the
design using files on the host computer to define stimuli, to interact with the user, and to
compare results with those expected. However, most designers leave this job to the
simulator.
It is relatively easy for an inexperienced developer to produce code that simulates
successfully but that cannot be synthesized into a real device, or is too large to be practical.
One particular pitfall is the accidental production of transparent latches rather than D-type
flip-flops as storage elements.
One can design hardware in a VHDL IDE (for FPGA implementation such as Xilinx ISE, Altera
Quartus, Synopsys Synplify or Mentor Graphics HDL Designer) to produce the RTL schematic
of the desired circuit. After that, the generated schematic can be verified using simulation
software which shows the waveforms of inputs and outputs of the circuit after generating
the appropriate testbench. To generate an appropriate testbench for a particular circuit or
VHDL code, the inputs have to be defined correctly. For example, for clock input, a loop
process or an iterative statement is required.

FPGA basic intelligent control implementation for HRRTCS
Page 15 of 29
A final point is that when a VHDL model is translated into the "gates and wires" that are
mapped onto a programmable logic device such as a CPLD or FPGA, then it is the actual
hardware being configured, rather than the VHDL code being "executed" as if on some form
of a processor chip.
Advantages
The key advantage of VHDL, when used for systems design, is that it allows the behavior of
the required system to be described (modeled) and verified (simulated) before synthesis
tools translate the design into real hardware (gates and wires).
Another benefit is that VHDL allows the description of a concurrent system. VHDL is a
dataflow language, unlike procedural computing languages such as BASIC, C, and assembly
code, which all run sequentially, one instruction at a time.
A VHDL project is multipurpose. Being created once, a calculation block can be used in many
other projects. However, many formational and functional block parameters can be tuned
(capacity parameters, memory size, element base, block composition and interconnection
structure).
A VHDL project is portable. Being created for one element base, a computing device project
can be ported on another element base, for example VLSI with various technologies.
PROJECT DEVELOPMENT To start programming in Vivado Design Suite, the sample programs shown below were
performed.
This program is about an AND gate with two inputs and one output. The explanation of each
instruction code is displayed next.
One of the most used libraries in the world of industry is called ieee, which contains some
types and functions that supplements that come by default in the language itself. Inside the
library there is a package called std_logic_1164, with which you can work with a system of
nine logic levels, such as unknown value, high impedance, etc. It is declared as follows:
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
The entity is to define the inputs and outputs that have a particular circuit. To define an entity
will be made by the keyword ENTITY. The PORT instruction defines the inputs and outputs of
the defined module. Basically it is to indicate the signal name followed by a colon and the
port address, plus the type of signal that it is. As before, if there is more than one signal it
will end with a semicolon, except the last signal from the list.

FPGA basic intelligent control implementation for HRRTCS
Page 16 of 29
entity AND_GATE is Port ( a : in STD_LOGIC; b : in STD_LOGIC; c : out STD_LOGIC); end AND_GATE;
The name of the architecture will be used to indicate what architecture should be used if you have several for the same entity. After this line several instructions may appear to indicate the statement signals, components, functions, etc. These signals are internal, that is, they cannot be accessed from the entity, for which top-level circuits could not access them. In this part of the architecture other elements may also appear, as may be constant. The following is the keyword BEGIN, which leads to the description of the circuit, through a series of sentences. VHDL is a concurrent language, therefore not the order in which the instructions when running the code are written will be followed. In fact, if two instructions need not run one before another, they can run at once. The basic instruction concurrent execution is the allocation between signals through the symbol <=. Therefore, the syntax of architecture is:
architecture Behavioral of AND_GATE is begin c <= a AND b; end Behavioral;
Other programs listed below were designed to improve programming logic in VHDL. The following program is a binary counter with LEDs, it has a clock input and 4 outputs are connected to the LEDs:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all; entity LedCounter is Port ( clk : in STD_LOGIC; led0_b : out STD_LOGIC; led1_b : out STD_LOGIC; led2_b : out STD_LOGIC; led3_b : out STD_LOGIC); end LedCounter; architecture Behavioral of LedCounter is signal counter : UNSIGNED(28 DOWNTO 0);

FPGA basic intelligent control implementation for HRRTCS
Page 17 of 29
begin process (clk) begin -- count from 0 to 2^29-1 and wrap around if (clk'event and clk = '1') then counter <= counter +1; end if; end process; -- connect the 4 MSBs to the blue LEDs led3_b <= counter(28); led2_b <= counter(27); led1_b <= counter(26); led0_b <= counter(25); end Behavioral;
The following program is an adder with four binary inputs, the binary sum converts it for display on a 7-segment display. To find the exit and reduce code in this program Karnaugh maps were made:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; entity bcd is Port ( A : in STD_LOGIC_VECTOR (1 downto 0); C : in STD_LOGIC_VECTOR (1 downto 0); B : out STD_LOGIC_VECTOR (6 downto 0)); end bcd; architecture Behavioral of bcd is signal suma: STD_LOGIC_VECTOR (2 downto 0); begin suma(0) <= A(0) XOR C(0); suma(1) <= (A(1) AND (NOT C(1)) AND (NOT C(0))) OR (A(1) AND (NOT A(0)) AND (NOT C(1))) OR ((NOT A(1)) AND (NOT A(0)) AND C(1)) OR ((NOT A(1)) AND C(1) AND (NOT C(0))) OR ((NOT A(1)) AND A(0) AND (NOT C(1)) AND C(0)) OR (A(1) AND A(0) AND C(1) AND C(0)); suma(2) <= (A(1) AND C(1)) OR (A(0) AND A(1) AND C(0)) OR (C(1) AND C(0) AND A(0)); with suma select B <= "1000000" when "000", "1111001" when "001", "0100100" when "010", "0110000" when "011", "0011001" when "100",

FPGA basic intelligent control implementation for HRRTCS
Page 18 of 29
"0010010" when "101", "0000010" when "110", "1111111" when others; end Behavioral;
IMPLEMENTATION OF PERCEPTRONS Neural networks can be used to determine relationships and patterns between inputs and outputs. A simple single layer feed forward neural network which has a to ability to learn and differentiate data sets is known as a perceptron. By iteratively “learning” the weights, it is possible for the perceptron to find a solution to linearly separable data (data that can be separated by a hyperplane). In this example made by MATLAB, it was run a simple perceptron to determine the solution to a 2-input OR. X1 or X2 were defined as follows:
Figure 4 Inputs and output of OR gate.
They were first initialized the variables of interest, including the input, desired output, bias, learning coefficient and weights.
input = [0 0; 0 1; 1 0; 1 1]; numIn = 4; desired_out = [0;1;1;1]; bias = -1; coeff = 0.7; rand('state',sum(100*clock)); weights = -1*2.*rand(3,1);
The input and desired_out were self explanatory, with the bias initialized to a constant. This value can be set to any non-zero number between -1 and 1. The coeff represents the learning rate, which specifies how large of an adjustment is made to the network weights after each iteration. If the coefficient approaches 1, the weight adjustments are modified more conservatively. Finally, the weights are randomly assigned.

FPGA basic intelligent control implementation for HRRTCS
Page 19 of 29
A perceptron is defined by the equation:
Therefore, in the example, the equation is: w1*x1+w2*x2+b = out It was assumed that weights(1,1) is for the bias and weights(2:3,1) are for X1 and X2, respectively. One more variable was set, specifying how many times to train or go through and modify the weights.
iterations = 10; Now the feed forward perceptron code.
for i = 1:iterations out = zeros(4,1); for j = 1:numIn y = bias*weights(1,1)+... input(j,1)*weights(2,1)+input(j,2)*weights(3,1); out(j) = 1/(1+exp(-y)); delta = desired_out(j)-out(j); weights(1,1) = weights(1,1)+coeff*bias*delta; weights(2,1) = weights(2,1)+coeff*input(j,1)*delta; weights(3,1) = weights(3,1)+coeff*input(j,2)*delta; end end
A little explanation of the code. First, the equation solving for ‘out’ was determined as mentioned above, and then run through a sigmoid function to ensure values were squashed within a [0 1] limit. Weights were then modified iteratively based on the delta rule. When running the perceptron over 10 iterations, the outputs began to converge, but were still not precisely as expected:
out = 0.3756 0.8596 0.9244 0.9952 weights = 0.6166 3.2359 2.7409

FPGA basic intelligent control implementation for HRRTCS
Page 20 of 29
As the iterations approach 1000, the output converged towards the desired output. out = 0.0043 0.9984 0.9987 1.0000 weights = 5.4423 12.1084 11.8823
The next step was to try to pass this code to VHDL. It was reached following code, however some compilation errors were obtained, because the VHDL language does not allow the creation of vectors of real numbers. The code was as follows:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all; entity perceptron_final is Port (); end perceptron_final; architecture Behavioral of perceptron_final is signal x1 : bit_vector(3 downto 0) ; signal x2 : bit_vector(3 downto 0) ; signal d : bit_vector(3 downto 0) ; begin x1(0) <= '0'; x1(1) <= '0'; x1(2) <= '1'; x1(3) <= '1'; x2(0) <= '0'; x2(1) <= '1'; x2(2) <= '0'; x2(3) <= '1'; d(0) <= '0'; d(1) <= '1'; d(2) <= '1'; d(3) <= '1';

FPGA basic intelligent control implementation for HRRTCS
Page 21 of 29
process variable w0: real :=0.5; variable w1: real :=0.5; variable w2: real :=0.5; variable suma: real :=0.5; variable error: real; variable y: std_logic; constant a: real :=1.0; constant x0: real :=1.0; begin bucle1: FOR i IN 0 TO 3 LOOP suma := x1(i)*w1 + x2(i)*w2 + x0*w0; if (suma>=0.0) then y :='1'; else y :='0'; error := d(i)-y; if(error/=0.0)then w0 := w0 + a*error*x0; w1 := w1 + a*error*x1(i); w2 := w2 + a*error*x2(i); else w0=w0; end if; end if; END LOOP bucle1; end process; end Behavioral;
Because it was failed to obtain the weights in VHDL, they were obtained analytically, and to prove that these weights were correct the following codes test were conducted, where the equation of the boundary decision perceptron was written, and with input switches this equation was tested, taking a LED as output: The implemented code to the AND gate is shown with two inputs connected to switches, and output to a LED. Because VHDL cannot run programs on the card with real numbers (only in simulation), weights were multiplied by a factor of 10 to have only integer numbers.
library IEEE;a

FPGA basic intelligent control implementation for HRRTCS
Page 22 of 29
use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all; entity perceptron2 is Port ( output : out STD_LOGIC; input1 : in STD_LOGIC_VECTOR(0 DOWNTO 0); input0 : in STD_LOGIC_VECTOR(0 DOWNTO 0)); end perceptron2; architecture Behavioral of perceptron2 is signal a : integer; signal b : integer; signal threshold : integer := 10; begin b <= to_integer(unsigned(input1)); a <= to_integer(unsigned(input0)); process(threshold, a, b) variable activation : integer := 0; variable peso1 : integer := 6; variable peso2 : integer := 6; begin activation := a*peso1 + b*peso2; if(activation>=threshold) then output <= '1'; else output <= '0'; end if; end process; end Behavioral;
To make the OR gate, the code of the AND gate only changed in the value of the weights:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all;

FPGA basic intelligent control implementation for HRRTCS
Page 23 of 29
entity perceptron2 is Port ( output : out STD_LOGIC; input1 : in STD_LOGIC_VECTOR(0 DOWNTO 0); input0 : in STD_LOGIC_VECTOR(0 DOWNTO 0)); end perceptron2; architecture Behavioral of perceptron2 is signal a : integer; signal b : integer; signal threshold : integer := 10; begin b <= to_integer(unsigned(input1)); a <= to_integer(unsigned(input0)); process(threshold, a, b) variable activation : integer := 0; variable peso1 : integer := 11; variable peso2 : integer := 11; begin activation := a*peso1 + b*peso2; if(activation>=threshold) then output <= '1'; else output <= '0'; end if; end process; end Behavioral;
The following code design shows a NOT gate, which only took one input and one output:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all; entity perceptron2 is Port ( output : out STD_LOGIC; input0 : in STD_LOGIC_VECTOR(0 DOWNTO 0));

FPGA basic intelligent control implementation for HRRTCS
Page 24 of 29
end perceptron2; architecture Behavioral of perceptron2 is signal a : integer; signal threshold : integer := -5; begin a <= to_integer(unsigned(input0)); process(threshold, a ) variable activation : integer := 0; variable peso1 : integer := -10; begin activation := a*peso1 ; if(activation>=threshold) then output <= '1'; else output <= '0'; end if; end process; end Behavioral;
In the following program, it was developed an XOR gate design, this design was more complicated, because three neurons for implementation were needed unlike the others only occupied one neuron:
library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.NUMERIC_STD.ALL; library UNISIM; use UNISIM.VComponents.all; entity perceptron2 is Port ( output : out STD_LOGIC; input1 : in STD_LOGIC_VECTOR(0 DOWNTO 0); input0 : in STD_LOGIC_VECTOR(0 DOWNTO 0)); end perceptron2; architecture Behavioral of perceptron2 is signal a : integer; signal b : integer;

FPGA basic intelligent control implementation for HRRTCS
Page 25 of 29
signal threshold : integer := 10; begin b <= to_integer(unsigned(input1)); a <= to_integer(unsigned(input0)); process(a, b) variable activation1 : integer := 0; variable peso1 : integer := 6; variable peso2 : integer := 6; variable out1 : integer; variable activation2 : integer := 0; variable peso3 : integer := 11; variable peso4 : integer := 11; variable out2 : integer; variable activation : integer := 0; variable peso5 : integer := -20; variable peso6 : integer := 11; begin activation1 := a*peso1 + b*peso2; if(activation1>=threshold) then out1 := 1; else out1 := 0; end if; activation2 := a*peso3 + b*peso4; if(activation2>=threshold) then out2 := 1; else out2 := 0; end if; activation := out1*peso5 + out2*peso6; if(activation>=threshold) then output <= '1'; else output <= '0'; end if; end process;

FPGA basic intelligent control implementation for HRRTCS
Page 26 of 29
end Behavioral;
RESULTS The results obtained are shown for some of the codes implemented in VHDL.
In the next picture the simulation of the first code is shown, the variation of the inputs with
the time and the output of an AND gate, are shown:
Figure 5 Simulation of the first simple code.
In the next picture, it is shown the implementation of the counter leds code deployed on
the ARTY, it is noted the change on the lighting on the leds depending on time:
Figure 6 Implementation of the Sample “Led counter program”.

FPGA basic intelligent control implementation for HRRTCS
Page 27 of 29
In the next picture, it is shown the ARTY with one of the codes of the perceptron
implemented.
The implementation of the code for an OR gate perceptron is shown next, it was tested with
two inputs whose values changed from 00, 01, 10 and 11 at press the switches, and the
output took the values of 0,1,1,1.
Figure 7 OR gate perceptron.
The other codes of the AND, NOT and XOR gate perceptrons were also implemented in the
ARTY, and also had the expected results.
The only code that couldn’t work, is the code for calculating the weights of the neuron in
VHDL, the problem was that at the moment of the creation of the input arrays, it couldn’t be
implemented the arithmetic operations for the type of signal, it was STD_LOGIC_VECTOR
and when it was converted to REAL, it was converter to a single number instead of an array.
Therefore, the pseudocode known for calculating the weights of a perceptron is not feasible
and it should be looked for another way, because the programming on an FPGA is parallel
and it should be taken advantage of this quality.
It is expected to find the solution of the mistakes soon and improve this project.
CONCLUSION This project was started with an intensive learning stage by its executer (E. González). Basics
for Artificial Neural Networks (ANN) and Vivado software were quickly learned. It was begun
reading different websites where the basic concepts of artificial neural networks were
explained, it was seen a tutorial on YouTube about this topic and exercises were conducted

FPGA basic intelligent control implementation for HRRTCS
Page 28 of 29
in the notebook to better understand the concept of perceptron. A software problem was
solved concerning the compatibility between the operating system and Vivado.
The development process was as follows. Having installed the software, tutorials were seen
to learn how to program in Vivado with examples in Verilog and VHDL, some of the examples
are shown in this report. It was implemented a successful program to calculate the weights
for the ANN in MATLAB. The weights were calculated analytically, and to check that they
were correct, they were created some codes in VHDL with the equation of the perceptron,
switches as inputs and a led as output.
This was a complex project were several issues still open, as the weights calculations of the
ANN through the software Vivado. Finally, it is concluded that this is a fascinating subject and
we would like to go further into it.
ACKNOWLEDGMENTS I would like to thank all the personnel of CIDESI especially Dr. Gengis K. Toledo Ramirez, for
accepting me in the program and for all support, Dr. Jose Antonio Torres Estrada and M.I.
Jonatan Marcelo Sosa Rincón, the person who helped me in doubts of VHDL programming. I
also would like to thank the Dolphin Program, through whom I had the opportunity to live
this very enriching experience, the Technological Institute of Morelia, for supporting me with
resource so that it could be possible to make this stay, I finally want to thank my fellows
Carolina Soria Zapata and Manuel Estrada Angulo for sharing this experience with me and to
my family for always supporting me.
REFERENCES
DIGILENT. “Arty Reference Manual.” Internet:
https://reference.digilentinc.com/reference/programmable-logic/arty/reference-manual,
[July 27, 2016].
Hackeando Tec. “Curso de Redes Neuronales Artificiales.” Internet:
https://www.youtube.com/watch?v=14tU9B4ReII&list=PLIyIZGa1sAZo_eY8PpuTxfLsja_iyytE
[July 27, 2016].
W. McCulloch and W. Pitts. "A Logical Calculus of Ideas Immanent in Nervous
Activity." Bulletin of Mathematical Biophysics, 19435, pp. 115–133.
Y. Freund and R. Schapire. "Large margin classification using the perceptron
algorithm" Machine Learning, 1999, 277–296.

FPGA basic intelligent control implementation for HRRTCS
Page 29 of 29
C. Bishop. Pattern Recognition and Machine Learning. N.Y: Springe, 2007, pp. 120-130.
V. Lugade. “Neural Networks – A perceptron in Matlab.” Internet:
http://matlabgeeks.com/tips-tutorials/neural-networks-a-perceptron-in-matlab/, May 11, 2011
[July 30, 2016].
















