Formal Evaluation of IMU-based Gesture Recognition for UAS ... · This gesture recognition system...
22
American Institute of Aeronautics and Astronautics 1 Formal Evaluation of IMU-based Gesture Recognition for UAS Aircraft Carrier Deck Handling Amanda K. Lampton, Ph.D. * Justin R.Gray † Justin P. Miller‡ Systems Technology, Inc., Hawthorne, CA, 90250 Integrating unmanned aircraft systems into manned operations is a challenging balancing act of making needed changes to accommodate the unmanned systems and yet minimizing the impact of those changes to daily operations. This is nowhere more apparent than on the flight deck of a Navy aircraft carrier in which daily operations and mission events are like a carefully choreographed danced that has evolved and been perfected over the last hundred years. A dance in which a breakdown in communication can result in a slowdown of operations at best and catastrophic damage to equipment and/or loss of life at worst. As the Navy moves toward integrating unmanned operations into manned, of particular importance is developing technology that allows the aircraft directors on deck to communicate with unmanned aircraft in as near to the same manner as they do with manned. This means using the same gesture-based lexicon with which directors communicate with pilots and without the addition of more personnel on deck. In response to this need, an effort was made to develop an inertial measurement-based gesture recognition hardware/software solution. This gesture recognition system entails standard signalman wands modified by embedding an inertial measurement unit in the shaft and machine learning-based classification algorithms using the inertial data as the input to establish that communication link between director and unmanned aircraft. The system was evaluated by four current U.S. Navy aircraft directors through a series of evaluation tasks intended to emulate basic carrier deck mission events. Quantitative assessments and director opinions of the system indicated that it enabled communication between them and the unmanned aircraft to the extent that the tasks could be accomplished in a timely manner and with little change to how they guide the aircraft. I. Introduction ue to the extraordinarily noisy environment, often reaching up to 140 dB, of an operational aircraft carrier deck with jet engines, rotorcraft rotors, wind, etc., communication on the flight deck has evolved into a primarily gestural language employed by Aircraft Directors (ADs) and Navy pilots to communicate with each other. An Unmanned Aircraft System (UAS) controlled by this same gesture vocabulary could integrate smoothly into this already chaotic environment, minimize disruptions to carrier evolutions, avoid the need for specially trained personnel, and minimize transition cost. With the imminent integration of UASs into carrier deck operations, a technological solution is needed to facilitate UAS deck handling and the communication between ADs and UASs that performs as well or better as that between ADs and Navy pilots, can learn new gestures as needed, and requires minimal additional devices or changes to standard deck operations. To meet this need and at the behest of the Office of Naval Research (ONR), a team led by Systems Technology, Inc. (STI) has created the on-Deck Intelligent Aircraft Body Language Observer (DIABLO). DIABLO is a unique IMU-embedded signalman wand hardware/software solution that uses a machine learning-based gesture recognition algorithm to interpret IMU data sensed within slightly modified standard signalman wands to interpret the signals given by ADs. This paper focuses on the formal evaluations of the DIABLO system by Navy ADs conducted at the NAS Patuxent River Manned Flight Simulator (MFS). * Senior Research Engineer, AIAA Senior Member. † Staff Engineer, Analytical, AIAA Member. ‡ Staff Engineer, Analytical, AIAA Member. D Downloaded by David Klyde on January 13, 2018 | http://arc.aiaa.org | DOI: 10.2514/6.2018-0075 2018 AIAA Information Systems-AIAA Infotech @ Aerospace 8–12 January 2018, Kissimmee, Florida 10.2514/6.2018-0075 Copyright © 2018 by Systems Technology, Inc. . Published by the American Institute of Aeronautics and Astronautics, Inc., with permission. AIAA SciTech Forum
Transcript of Formal Evaluation of IMU-based Gesture Recognition for UAS ... · This gesture recognition system...

American Institute of Aeronautics and Astronautics
1
Formal Evaluation of IMU-based Gesture Recognition for
UAS Aircraft Carrier Deck Handling
Amanda K. Lampton, Ph.D.*
Justin R.Gray†
Justin P. Miller‡
Systems Technology, Inc., Hawthorne, CA, 90250
Integrating unmanned aircraft systems into manned operations is a challenging
balancing act of making needed changes to accommodate the unmanned systems and yet
minimizing the impact of those changes to daily operations. This is nowhere more apparent
than on the flight deck of a Navy aircraft carrier in which daily operations and mission
events are like a carefully choreographed danced that has evolved and been perfected over
the last hundred years. A dance in which a breakdown in communication can result in a
slowdown of operations at best and catastrophic damage to equipment and/or loss of life at
worst. As the Navy moves toward integrating unmanned operations into manned, of
particular importance is developing technology that allows the aircraft directors on deck to
communicate with unmanned aircraft in as near to the same manner as they do with
manned. This means using the same gesture-based lexicon with which directors
communicate with pilots and without the addition of more personnel on deck. In response to
this need, an effort was made to develop an inertial measurement-based gesture recognition
hardware/software solution. This gesture recognition system entails standard signalman
wands modified by embedding an inertial measurement unit in the shaft and machine
learning-based classification algorithms using the inertial data as the input to establish that
communication link between director and unmanned aircraft. The system was evaluated by
four current U.S. Navy aircraft directors through a series of evaluation tasks intended to
emulate basic carrier deck mission events. Quantitative assessments and director opinions of
the system indicated that it enabled communication between them and the unmanned
aircraft to the extent that the tasks could be accomplished in a timely manner and with little
change to how they guide the aircraft.
I. Introduction
ue to the extraordinarily noisy environment, often reaching up to 140 dB, of an operational aircraft carrier deck
with jet engines, rotorcraft rotors, wind, etc., communication on the flight deck has evolved into a primarily
gestural language employed by Aircraft Directors (ADs) and Navy pilots to communicate with each other. An
Unmanned Aircraft System (UAS) controlled by this same gesture vocabulary could integrate smoothly into this
already chaotic environment, minimize disruptions to carrier evolutions, avoid the need for specially trained
personnel, and minimize transition cost. With the imminent integration of UASs into carrier deck operations, a
technological solution is needed to facilitate UAS deck handling and the communication between ADs and UASs
that performs as well or better as that between ADs and Navy pilots, can learn new gestures as needed, and requires
minimal additional devices or changes to standard deck operations.
To meet this need and at the behest of the Office of Naval Research (ONR), a team led by Systems Technology,
Inc. (STI) has created the on-Deck Intelligent Aircraft Body Language Observer (DIABLO). DIABLO is a unique
IMU-embedded signalman wand hardware/software solution that uses a machine learning-based gesture recognition
algorithm to interpret IMU data sensed within slightly modified standard signalman wands to interpret the signals
given by ADs. This paper focuses on the formal evaluations of the DIABLO system by Navy ADs conducted at the
NAS Patuxent River Manned Flight Simulator (MFS).
* Senior Research Engineer, AIAA Senior Member. † Staff Engineer, Analytical, AIAA Member. ‡ Staff Engineer, Analytical, AIAA Member.
D
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075
2018 AIAA Information Systems-AIAA Infotech @ Aerospace
8–12 January 2018, Kissimmee, Florida
10.2514/6.2018-0075
Copyright © 2018 by Systems Technology, Inc.
. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.
AIAA SciTech Forum

American Institute of Aeronautics and Astronautics
2
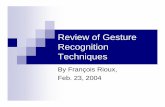
Recent efforts to integrate UASs into the fleet include Northrop Grumman’s X-47B. The X-47B is an unmanned
combat air vehicle (UCAV) that was designed to test integrating autonomous aircraft into aircraft carrier-based
operations. Two demonstrators were built and tested between 2011 and 2015, performing both land- and carrier-
based demonstrations. The X-47B is a blended wing-body aircraft with a 62.1 ft wingspan and 38.2 ft length. Its
cruising speed is Mach 0.9+ with a service ceiling of 40,000 ft and range of 2,100+ nm. It is classified as semi-
autonomous as there are some operations in which a remote pilot has control. A photo of the X-47B on a carrier
deck is shown in Figure 1.
Figure 1: X-47B Arrested Carrier Landing on the USS George H.W. Bush
Of particular interest to the DIABLO program is the X-47B precision taxi test phase that was conducted on the
USS Harry S. Truman beginning on Dec. 9, 2012.1 The UCAV’s flight control systems are fully autonomous, but
ground maneuvers are controlled remotely via an arm-mounted control display unit (CDU, see Figure 2).2 The
operator of the CDU follows the direction of the aircraft directors who signal to the UCAV just as they would to any
other aircraft, thus disrupting deck operations as little as possible. As shown in Figure 3, one of the CDU operators
followed the signals of the aircraft director and showed that the X-47B could move with precision around the deck.
Figure 2: Arm-mounted CDU
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
3
Figure 3: Operator Using the CDU to Follow Aircraft Director Signals to Taxi the X-47B Aboard the USS
Harry S. Truman
Though well received by the crew, this initial solution requires an additional person on the flight deck for each
active UAS, which the Navy does not find ideal. Alternatively, there is a significant body of work on recognition of
hand gestures using optical sensing. Venetsky in Ref. 3 thoroughly defines the problem of computer vision and
gesture recognition of the flight deck. He discusses technical issues and describes the conditions with which to
contend when selecting optical sensors and recognition approaches. Major challenges to vision-based gesture
recognition include:
• Low light
• Blooming
• Sun glare
• Steam
• Jet exhaust
• Pose
• Occlusion
• Scene Clutter
• Orientation with respect to aircraft nose
• Rotation with respect to aircraft
• Director hand-off
• Temporal resolution
Of which, DIABLO is susceptible to none.
This paper discussing the formal evaluation of DIABLO is organized as follows. The DIABLO system, both
software and hardware, is described in Section II. The simulator and simulation environment in which the formal
evaluations were conducted are described in Section III. The evaluation tasks in general and the one exemplified
herein are discussed in Section IV. The formal evaluation test set up is discussed in Section V. Results are discussed
in Section VI followed by conclusions drawn from the formal evaluations in Section VII.
II. The DIABLO System
The DIABLO system consists of both a hardware and software component. The prototype hardware component
is comprised of standard signalman wands with a commercial-off-the-shelf IMU embedded in the shaft of the wand.
The software component is the gesture recognition algorithm, which is shown in block diagram form in Figure 4 as
it relates to and communicates with the wands and aircraft. The software itself is comprised of the Gesture
Classification Algorithm and State Logic Algorithm.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
4
Figure 4: DIABLO Gesture Recognition Algorithm
A. Gesture Recognition Algorithm
1. Gesture Classification Algorithm
The core of the Gesture Classification Algorithm is a model generated using the Library for Online Learning
(LIBOL) algorithms, an open-source library of a family of classical and state-of-the-art online learning algorithms
for large-scale machine learning and data mining research.4 The classifying algorithms require a feature set upon
which to base classification. These feature vectors are extracted from a signal set sent from the DIABLO wands that
includes the three linear accelerations in the x-, y-, and z-axis, the three angular accelerations, and the three
magnetometer readings.
The inertial data used to train the model was gathered from 22 ADs stationed on the USS Carl Vinson while the
ship was in port in October 2016. Using the DIABLO wands, they each performed five sets of the NATOPS gestures
listed below.
• Move Ahead
• Move Back
• Slow Down
• Turn Left
• Turn Right
• Pass Control
• Slow Down Left Engine
• Slow Down Right Engine
• Shut Down Left Engine
• Shut Down Right Engine
• Spread Wing
• Fold Wing
• Stop
• I Have Command
• Engage Nose Gear
• Disengage Nose Gear
• Launch Bar Up
• Launch Bar Down
• Up Hook
• Down Hook
• Pivot Left/Right
• Brakes On/Off
• Throttle Up
• Throttle Down
• Added Capability • Move Ahead
• Slowest
• Slow
• Pace
• Fast
• Fastest
• Turn Left/Right
• Widest
• Wide
• Veer
• Tight
• Nose Bump
Using the DIABLO system, as the AD performs a gesture, the sensed inertial data is passed to the gesture
classification algorithm. Using the trained model, the data is classified and that gesture with the highest value is
passed on as the ‘recognized’ gesture.
2. State Logic Algorithm
To improve the accuracy of the classification algorithm, the State Logic Algorithm was implemented within the
greater Gesture Recognition Algorithm. The algorithm effectively limits the gestures that can be recognized in a
given aircraft deck handling state. The aircraft deck handling states are
• Taxi
• Non-Taxi
• Pivot
• Launch
• Precision
• Recovery
• Emergency
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
5
• No Aircraft
An example of the restricted gestures is for the Taxi state the gestures that can be recognized are Move Ahead, Stop,
Turn Left/Right, Pass Control, Spread/Fold Wings, and Pivot Left/Right.
The final recognized gesture output by the Gesture Recognition Algorithm is sent to the UAS, which interprets
that command into a ground control command.
B. IMU-Embedded Signalman Wands
The prototype IMU-embedded wand is shown in Figure 5 with a standard signalman wand and a Yost Labs 3-
Space™ Wireless 2.4GHz DSSS IMU. It is disassembled in Figure 5a, assembled with a ghost image of the sensor
Figure 5b, and down-the-shaft to show how the IMU is integrated into the wand in Figure 5c. The wireless inertial
sensors fit in the signalman wands with minimum room for movement. To embed them into the wands, the
incandescent light bulb was replaced with a LED to create room within the wand by eliminating the need for 2 D
batteries. The sensor is then mounted and secured to reduce movement.
a) Wand Components
b) Sensor Location
c) Shaft View
Figure 5: Prototype IMU-Embedded Signalman Wand
To further increase classification accuracy, triggers were added to the signalman wands (Figure 6). This addition
enables additional user input while performing gestures. The current IMUs embedded in the wands have two toggle
buttons on the front face of the sensor casing, which output a 0 when not depressed and either a 1, 2, or 3 when
depressed. To utilize the buttons on the sensors, a mechanical trigger was added to each wand that can be depressed
using the index and middle fingers of each hand.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
6
Figure 6: DIABLO Wand with Trigger
To implement the trigger within the algorithm, rather than recollecting data with the trigger in use, the trigger
acts as a Boolean operator, meaning when the trigger value is greater than 0, the wand trigger is being pressed. In
practice, this means that when the left trigger is pressed, the algorithm will only classify left directional gestures,
thus reducing the number of gestures from which the recognition algorithm can select.
III. Simulator Test of the DIABLO System
A. Simulator Description
Lab 8 of the MFS is the SEOS Prodas Partial Dome simulator. The display system in Lab 8 (see Figure 7)
features an 11-ft diameter real image with 180-deg horizontal, 85-deg up, and 35-deg down field-of-view. Six
Projection Design FL35 LED projectors are used, each having a 2560x1600 pixel resolution, and the display
provides the equivalent of 20/60 visual acuity. The Aechelon pC-Nova image generator is capable of displaying
300k+ polygons updated at 60 Hz with less than 60 ms transport delay.
Figure 7: MFS Lab 8 Simulator
B. Simulation Description
Specific to deck handling Research Development Test & Evaluation (RDT&E), several additional capabilities
have been developed. First, the MFS’s F/A-18E airframe simulation can be used as a surrogate UAS with the
addition of a command-based ground controller developed and integrated with the F-18 E/F airframe. The controller
accepts speed and turn commands as well as discrete signals such as Brakes On, Hook Up, Launch Bar Down, etc.
The visual environment of the carrier deck and the air vehicle are enhanced to support precise visual positioning for
deck handling tasks such as catapult hookup and deck edge parking. Viewpoint slewing supports multiple directors
with a single aircraft, and multiple lab stations can be tied together to support multi-director, multi-aircraft scenarios.
Environmental factors including weather, visibility, ship motion, variable deck friction, and wind conditions are also
available for use in testing. Additionally, a 3-D sound model of the simulated aircraft engine noise was developed to
aid in enriching the cueing of vehicle response to controller commands.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
7
Figure 8: View into MFS Lab 8 During a DIABLO Evaluation Run
C. System Configuration and Integration
Integrating DIABLO into MFS Lab 8 required two computers. One ran the DIABLO software and received the
incoming data from the signalman wands. It also ran the interface for MFS while the second computer hosted the
simulation and graphics models. A simplified block diagram of this setup is illustrated in Figure 9. The main
challenges faced when integrating DIABLO included ensuring the DIABLO software executed properly on the MFS
computer and ensuring proper communication from DIABLO to the surface software, which then sends the
commands to the aircraft simulation.
Figure 9: MFS/DIABLO Integration Block Diagram
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
8
IV. Evaluation Tasks
A. Overview
The evaluation tasks were designed to assess the performance of DIABLO as an AD taxis a UAS through basic
on deck mission events and path following tasks. A top-down diagram of the simulated aircraft carrier is shown in
Figure 10 with pertinent areas and boundaries labeled.
Figure 10: Top Down Diagram of the Simulated Aircraft Carrier
The tasks evolved over the course of the checkout weeks and first evaluation week at MFS with feedback from
the ADs. The final set of tasks used for formal evaluations include:
• Finger to Launch
• Retrieval to Finger
• Retrieval to Launch
• Path Following Simple
• Path Following Complex
For brevity, the Finger to Launch task is the focus herein as it highlights the maneuverability that is achievable
with DIABLO as the aircraft taxis the length of the deck as well as the precision control necessary to successfully
engage the aircraft in the catapult and ready for launch.
B. Finger to Launch Task Description
Objectives
• Evaluate aircraft taxiing task performance.
• Characterize director assessment of the DIABLO hardware/software solution for UAS carrier deck
handling via ratings, comments, and/or targeted debrief questionnaires.
Environmental Conditions
• Day
• Clear
• 200 mi visibility
• Calm sea state
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
9
Pre-Task Setup
• Launch Bar: Up
• Hook: Up
• Brakes: On
• Power: Idle
• Wings: Folded
• Has Command: Director 1
• Viewpoint: VP 1
Description
From the initial parked position on the finger, direct the aircraft across the landing strip and forward past the
island, avoiding wire mounts and other obstacles. Direct the aircraft toward the elevator just forward of the island,
and near the edge of the deck execute a turn port toward the bow of the ship. Follow the edge of the ship to the next
elevator. Then direct the aircraft to catapult 1. Execute the procedure to prepare the aircraft for a catapult launch up
to and including passing control to the shooter.
While taxiing, pass control to the next director before the aircraft nose passes the current director’s position. The
next director will be signaling I Have Command to accept command of the aircraft. The viewpoint (see Figure 11
and Table 1) will change with the Pass Control/I Have Command exchange. If only one director is working the task,
Pass Control only will trigger the viewpoint change.
Figure 11: Finger to Launch Task Viewpoints
Table 1: Finger to Launch Task Viewpoint Coordinates
N
o.
X, +fwd
(ft)
Y, +stbd
(ft)
Yaw* (deg)
1 -348.79 -85.20 165.0
2 -330.09 90.00 300.0
3 -55.33 24.32 130.0
4 159.48 29.69 110.0
5 241.97 62.62 176.1
6 240.34 22.29 80.0
*Yaw denotes the direction of the view with North through the MFS aircraft carrier simulation y-axis (x-axis in
the figures here).
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
10
Desired Performance
• <180 sec from finger to jet blast deflector 1
• Successfully prep for launch in 1 attempt
Adequate Performance
• <270 sec from finger to jet blast deflector 1
• Successfully prep for launch in 2-3 attempts
V. Formal Evaluations
The duration of each evaluation simulator entry was about 1.5 hours; four ADs served as evaluators. Each AD
was briefed on the tasks. This briefing included discussion of the purpose and goals of the program, the nuances of
the DIABLO hardware and software, and the addition of the trigger to the signalman wands and their use.
The simulator entry consisted of adequate time for familiarization of the system and around 10 formal evaluation
runs. During the familiarization period, the carrier and UAS deck simulation were running, and the AD practiced
using the wands and performing all of the gestures in the lexicon of DIABLO. This included practicing the precision
approach to Cat 1, dropping the launch bar into the catapult cradle, engaging the catapult, and throttling up the
aircraft in preparation for launch. Once comfortable, the AD performed each of the taxiing tasks two or three times
and both of the path following tasks once.
VI. Director Simulation Results
Exemplar results of the pool of ADs are presented and discussed herein. Exemplar performance results for the
Finger to Launch task are presented for AD 2. DIABLO classification results and AD opinion results are presented
for the whole of the formal evaluation.
A. Task Performance Results
The overlay of the Finger to Launch run on the ship deck is shown in Figure 12. Three tracks are shown on this
overlay: 1) Nose Gear, 2) Aircraft CG, and 3) Aircraft Main Gear Midpoint. Tracking these three aircraft points
illustrates how the aircraft is manipulated whilst taxiing to maneuver around the flight deck. For example, the
aircraft is brought straight out from the parked position on the finger between viewpoints 1 and 2 and commanded to
turn sharply near the midpoint of Wire 1 as indicated by the looping of the nose gear tracked position and the sharp
turn of the CG and Main Gear Midpoint positions. The aircraft is taken nearly perpendicular across the wires with
nose and main gear in line. Small corrections are commanded as the aircraft taxis down the length of the deck and
lines up with Cat 1.
The Nose Gear position with respect to time is shown in Figure 13. The dashed magenta line indicates the time
when the Nose Gear crosses the aft edge of JBD 1 near viewpoint 4. These subfigures show that the initial maneuver
from being parked on the Finger to turning to cross the landing wires takes ~35 sec. The aircraft takes 252 sec to
travel from the Finger to JBD 1, and the end game of lining up the aircraft with the catapult and preparing for launch
takes 120 sec.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
11
Figure 12: Finger to Launch – Ship Deck Track
Figure 13: Finger to Launch – Aircraft Nose Gear Location
The time metric of interest, time from Finger to JBD 1, for this task is compared for all ADs in Figure 14. The
gray dash-dot line indicates the desired performance level, as in anything below that line is considered desired
performance. The adequate performance line is the gray dash line. The performance metric from the exemplar data
described in this section is considered adequate performance. Most of the runs fell within the adequate performance
range for this metric, though many of the later runs for AD 1, 3, and 4 achieved desired performance. This trend
suggests that the ADs became more confident in moving the aircraft quickly down the aircraft carrier deck with
DIABLO.
0 100 200 300 400-400
-300
-200
-100
0
100
200
300
400
Time (sec)
X (
ft)
0 100 200 300 400-150
-100
-50
0
50
100
150
Time (sec)
Y (
ft)
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
12
0 1 2 3 4 5
Aircraft Director
0
50
100
150
200
250
300
350
400
Tim
e (
se
c)
Session 1
Session 2
Figure 14: Finger to Launch – Aircraft Nose to JBD 1 Task Performance
B. Classification Accuracy
In machine learning, a confusion matrix is used to judge the accuracy and performance of an algorithm. For
DIABLO, the confusion matrix represents the accuracy of the gesture performed versus the predicted output of the
algorithm. The confusion matrix is normally formatted as a table, and in those presented below, the columns
represent the actual gesture performed and the rows represent the gesture output from the algorithm. The average of
the matrix diagonal is the overall system accuracy. Ideally, this value is 100%.
1. Methodology
Videos of each of the evaluation sessions were recorded. Included in the field of view of the video was a monitor
(see Figure 15, bottom right corner) that displayed the timestamp of the command history, the gesture performed,
and which triggers are currently pressed by the director. These data and the gesture the director was performing were
then transcribed for comparison to the gesture command history recorded from the DIABLO software. The overall
confusion matrix derived from these data represents the total accuracy of the system and is what must be optimized
for a successful DIABLO system.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
13
Figure 15: Screenshot of Information Monitor and Director Performing a Task
2. Gesture Concatenation
When testing the DIABLO system, the full set of gestures in the DIABLO lexicon were not used because of the
design of the evaluation tasks. Therefore, only the gestures for which there is data were included in the confusion
matrices. However, the rest of the gestures were tested in a laboratory setting. This subset of gestures included Down
Hook, Throttle Down, Engage Nose Gear Steering, and Disengage Nose Gear Steering.
Of the set of gestures that were used, some are only differentiated by the use of the wand triggers. For example,
Brakes On and Stop are performed in the same manner save for the addition of pressing both triggers to send the
Brakes On command rather than just Stop. Since there is no distinction between the two gestures aside from the use
of the triggers, Stop and Brakes On were combined in the confusion matrix.
3. Results
Due to the real-time aspect of the DIABLO system, two confusion matrices can be created—one with the system
delay considered and one with the system delay ignored. The confusion matrix without system delay is discussed
first as it yielded higher accuracy across the board as opposed to that when the system delay is included. The reason
for this difference in accuracy is that when the aircraft director begins a gesture, the accuracy calculation begins, but
the recognition algorithm has not yet caught up with the director. That delay in the algorithm reduces the accuracy
even though the gesture was recognized correctly shortly thereafter.
Discussion
Table 2 lists the abbreviations for the gestures used in the confusion matrices. Table 3 shows the DIABLO
system confusion matrix with the delay ignored.
The overall accuracy of the algorithm as shown in the system confusion matrix is 91.5%. This was calculated
using 48 runs from four aircraft directors. As the aircraft directors completed evaluation tasks, their competency
with the system improved resulting in higher algorithm accuracy.
Continuing to refine the gesture recognition algorithm itself would improve the accuracy more. Possible
refinements include improving interpretation of gestures by the vehicle, e.g. ignoring commands that do not make
sense, more efficient custody exchange protocol, and more robust processes within the classification algorithm to
better reflect individual classifier accuracies.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
14
Table 2: System Confusion Matrix Gesture Abbreviations
Abbreviation Name
ma Move Ahead
st Stop
bo Brakes Off
pc Pass Control
tl Turn Left
tr Turn Right
pl Pivot Left
pr Pivot Right
uh Landing Hook Up
sw Spread Wings
fw Fold Wings
rlb Raise Launch Bar
llb Lower Launch Bar
tu Throttle Up
Table 3: DIABLO System Confusion Matrix without Delay
ma st bo pc tl tr pl pr uh sw fw rlb llb tu
ma 97% 14% 11% 8% 8% 6% 4% 1% 0% 0% 1% 0% 0% 0%
st 0% 64% 9% 1% 0% 0% 0% 0% 10% 0% 1% 0% 0% 0%
bo 0% 4% 79% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0%
pc 2% 3% 0% 87% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0%
tl 0% 0% 1% 0% 90% 0% 0% 0% 0% 0% 0% 0% 0% 0%
tr 0% 4% 0% 0% 0% 94% 0% 0% 0% 0% 0% 0% 0% 0%
pl 0% 0% 0% 0% 1% 0% 96% 0% 0% 0% 0% 0% 0% 0%
pr 0% 0% 0% 0% 0% 0% 0% 99% 0% 0% 0% 0% 0% 0%
uh 0% 7% 0% 1% 0% 0% 0% 0% 90% 0% 0% 0% 0% 0%
sw 0% 1% 0% 0% 0% 0% 0% 0% 0% 100% 0% 0% 0% 0%
fw 0% 1% 0% 0% 0% 0% 0% 0% 0% 0% 98% 0% 0% 0%
rlb 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 89% 1% 0%
llb 0% 2% 0% 2% 0% 0% 0% 0% 0% 0% 0% 2% 99% 0%
tu 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 9% 0% 100%
Table 4 shows the confusion matrix for the overall system with delay included. The overall accuracy of the of
the algorithm with delay as shown in the confusion matrix is 83.3%. This was calculated using the same sets of data
used above. As previously stated, this confusion matrix does not fully represent the accuracy of the system due to
how the confusion matrix is calculated. Since the calculation begins at the start of the gesture being performed, the
gestures sent from the algorithm between the start and when the new gesture is recognized and classified is
considered a misclassification. The average system delay was ~500 milliseconds. When evaluated, the aircraft
directors stated that the delay was not noticeable and was representative of a piloted aircraft.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
15
Table 4: DIABLO System Confusion Matrix with Delay Included
ma st bo pc tl tr pl pr uh sw fw rlb llb tu
ma 93% 14% 15% 13% 14% 11% 8% 3% 0% 8% 1% 1% 0% 0%
st 0% 58% 10% 3% 1% 0% 2% 0% 12% 5% 1% 1% 2% 0%
bo 0% 7% 72% 1% 0% 0% 0% 0% 2% 0% 0% 0% 0% 0%
pc 4% 5% 0% 79% 0% 0% 0% 0% 1% 0% 0% 0% 0% 0%
tl 1% 1% 1% 1% 82% 0% 0% 0% 0% 0% 0% 0% 0% 0%
tr 1% 4% 0% 0% 0% 87% 1% 0% 0% 0% 0% 0% 0% 0%
pl 0% 0% 0% 0% 2% 0% 89% 0% 0% 0% 0% 0% 0% 0%
pr 0% 0% 0% 0% 0% 1% 0% 97% 0% 0% 0% 0% 0% 0%
uh 0% 7% 0% 1% 0% 0% 0% 0% 86% 0% 0% 0% 1% 0%
sw 0% 1% 1% 0% 0% 0% 0% 0% 0% 71% 0% 0% 0% 0%
fw 0% 1% 1% 0% 1% 0% 0% 0% 0% 0% 82% 0% 0% 0%
rlb 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 0% 75% 2% 0%
llb 0% 3% 0% 2% 0% 0% 0% 0% 0% 0% 0% 15% 95% 0%
tu 0% 0% 0% 0% 0% 0% 0% 0% 0% 16% 16% 7% 0% 100%
Sources of Errors
The gesture with the highest amount of error was the Stop gesture. Stop is available as a command in any aircraft
state, which is the likely cause of this high error rate as there is a greater chance for it to be confused with another
gesture, but was considered a necessary safety measure. While the accuracy is lower than that of the other gestures,
it had little impact on the aircraft director’s ability to control the aircraft.
Brakes Off also had a high amount of error. Brakes Off can only be performed when the brakes are on and the
aircraft is in the Non-Taxi State. When coming out of the Non-Taxi State, the aircraft switches to a Taxi State where
Stop and Move Ahead are available for classification. Due to the similar motions between Brakes Off, Stop, and
Move Ahead, it was expected that this would occur since the algorithm was observed to flip between gestures. Since
the aircraft is not moving as the gesture is performed, it does not create any dangerous situations. However, this
misclassification should be resolved. The impact it had on the aircraft director’s ability to control the aircraft was
minimal with the worst-case scenario being the aircraft reverting to a Non-Taxi State. The biggest performance issue
this could create is in fast-paced scenarios where the aircraft needs to be taxiing as soon as possible.
The gesture with the third largest amount of error was Pass Control. The current custody exchange algorithm
implemented in the DIABLO system was designed specifically for passing control and transitioning viewpoints in
the evaluation tasks. This solution is not a suitable candidate for a final product. More realistic methods of
performing the custody exchange have been discussed; however, due to the scope of this program, they were not
implemented and would not have been effective in the evaluation testing simulation environment.
C. AD Opinion Results
The questionnaire was distributed to the participating ADs after the simulator session to obtain opinions about
their experience with the DIABLO system. The AD debrief questionnaire was designed using a 5-point Likert scale
that addressed six distinct areas: 1) Use of IMU-Embedded Signalman Wands During Evaluation Tasks, which
gauged the ease of use of the wands in the simulation environment; 2) Projected Use of IMU-Embedded Signalman
Wands During Carrier Deck Operations, which gauged the projected use of the wands in the carrier deck
environment; 3) Carrier Deck Taxiing Tasks, which assessed the evaluation tasks; 4) Buttons/Triggers Gesture
Modification, which assessed the ADs’ reaction to the addition of the buttons/triggers; 5) Aircraft States for Deck
Operations, which assessed the ADs’ reaction to the breakdown of the deck maneuvering into a series of states each
with a subset of gestures available to the recognition algorithm; and 6) Hardware/Software Solution as a Training
Tool, which assessed the opinion of the ADs regarding the utility of using DIABLO and a suitable simulation
environment as a training tool for both manned and unmanned operations.
The results for the “Use of IMU-Embedded Signalman Wands During Evaluation Tasks” portion of the
questionnaire are shown in Figure 16. From these data, the ADs found the use of the wands intuitive and in line with
their training. Maintaining the proper orientation of the wands was easy, and the handedness of the wands did not
pose a problem in the simulation environment. The ADs also felt the IMU-embedded signalman wands felt similar
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
16
to those used while on duty. For the ADs discussed in detail herein, the following additional comment from AD 2
was noted:
“Wands have come along by leaps and bounds when it comes to oversensitivity. The buttons
and designated left and right wands add another step to the process, but nowhere near a deal
breaker.”
Figure 17 presents the results of the “Projected Use of IMU-Embedded Signalman Wands During Carrier Deck
Operations” portion of the questionnaire. All the ADs strongly agree that the use of signalman wands is routine, and
they are split between agree and strongly agree that using the wands for all UAS handling will be intuitive and in
line with their training. The directors believe that maintaining the proper orientation of the wands should not be a
problem on duty on an aircraft carrier deck. The handedness of the wands could pose a problem for the directors on
a carrier deck according to one director. The other three do not think it will be an issue. As to the differences in the
DIABLO wands and standard signalman wands, three directors do not think they will be distracting on a carrier deck
and one is neutral.
Figure 18 presents the results of the “Carrier Deck Taxiing Tasks” portion of the questionnaire. For the Finger to
Launch task and the Retrieval to Finger task, the directors say these tasks are representative of director/aircraft
communication and aircraft response. The directors’ opinions regarding the Retrieval to Launch task, the Simple
Path Tracking task, and the Complex Path Tracking task were not as strongly in accord that communication and
response were representative with one, two, or two, respectively, only agreeing rather than strongly agreeing. The
following additional comment by AD 1 was noted:
“The complex path was extremely hard. Turns too sharp.” – AD 1
Figure 19 presents the results of the “Buttons/Triggers Gesture Modifications” portion of the questionnaire in
which the ADs generally found the use of the buttons/triggers for certain gestures intuitive and did not significantly
impact their performance with two agreeing and two strongly agreeing. For the ADs discussed in detail herein, the
following additional comments were noted:
“Pivot turn, on/off brakes were great. Nose wheel bump was touchy due to speed control.” –
AD 1
“Buttons still need getting used to. They just add an extra step to the process.” – AD 2
Figure 20 presents the results of the “Aircraft States for Deck Operations” portion of the questionnaire. The ADs
either agree or strongly agree that dividing the standard carrier deck operations into aircraft taxi states is intuitive
and straightforward and that the gestures available in each allow for unrestricted performance of the evaluation
tasks. In addition, the ADs all strongly agree that those gestures available in each aircraft taxi state correspond to
those generally used for those subtasks during normal carrier deck operations. An additional comment noted by AD
2:
“Gestures were in line with actual carrier deck training. Delays in computer threw me off and
over-correction was common.” – AD 2
Finally, Figure 21 presents the results of the “Hardware/Software Solutions as a Training Tool” portion of the
questionnaire. One AD agreed and the rest strongly agreed that a DIABLO-based carrier deck simulation would be a
valuable training tool for interacting with manned aircraft. All ADs strongly agreed that a DIABLO-based carrier
deck simulation would be a valuable training tool for interacting with UAS. In addition, AD 2 noted
“The hardware/software is an intuitive training aid and would be a valuable asset when dealing
with manned/unmanned aircraft alike.” – AD 2
AD 2 had on final general comment about the system that is worthy of note:
“This training in general seems to have great promise. Bugs such as sensitive controls have
improved greatly since the second and last time I was here and certainly the first. Gets better and
easier to every time I interact with it.” – AD 2
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
17
Figure 16: Director Questionnaire – Use of IMU-Embedded Signalman Wands During Evaluation Tasks
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
18
Figure 17: Director Questionnaire – Projected Use of IMU-Embedded Signalman Wands During Carrier
Deck Operations
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
19
Figure 18: Director Questionnaire – Carrier Deck Taxiing Tasks
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
20
Figure 19: Director Questionnaire – Buttons/Triggers Gesture Modifications
Figure 20: Director Questionnaire – Aircraft States for Deck Operations
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
21
Figure 21: Director Questionnaire – Hardware/Software Solutions as a Training Tool
VII. Conclusions
Over the course of the SBIR program summarized herein, the IMU-based gesture recognition system for UAS
integration into the aircraft carrier deck environment, DIABLO, was developed. The DIABLO hardware and
software were progressed to the point that a first round of formal evaluations was appropriate. From these
evaluations, valuable performance metrics, accuracy matrices, and director opinions were obtained from which to
assess the current state of DIABLO as well as to map out a path for future development.
The evaluation tasks to exercise DIABLO were developed based on mission evenets common to the flight deck
environment. Such testing has never been formally conducted by engineers and ADs. As such several conclusions
can be drawn by this initial testing of the Finger to Launch task specifically. The ADs were able to quickly
command the aircraft to taxi the length of the carrier to Cat 1. Aircraft ground max speed may need to be adjusted as
development and testing continue due to the length of the task. After several practice runs, the ADs achieved the
dexterity to prepare the aircraft for launch. The performance metrics appear to be appropriate for this small sample
size. A performance metric for time from crossing JBD 1 to ready for launch procedures should be added in future
testing. Finally, the task and viewpoint changes work well and were found to be effective for both simulating a
common carrier deck mission events and exercising DIABLO in realistic situations.
The DIABLO hardware was generally well-received by the many ADs. They understood that the wands used for
development and evaluation were prototypes that would be improved upon in future iterations. As such, several
conclusions regarding the DIABLO hardware can be drawn. The ruggedness of the wands and sensors must be taken
into account without adding undue weight. The triggers are a viable solution for accuracy improvement. Their use
was simple to learn within the brief time evaluation testing was conducted. The handedness of the wands may be an
issue. Either a software solution to recognize which wand is in which hand or a hardware solution to ensure the
correct orientation may be necessary. Finally, requiring the use of the DIABLO wands during the day to
communicate with UASs on deck should not be an undue burden.
In addition, the gesture recognition software performed well and several more conclusions can be drawn. Gesture
classification was acceptably robust to AD given that a 91.5% accuracy was achieved with none of the evaluation
ADs contributing data to the training of the classification model within DIABLO. The ~500 ms delay between the
AD beginning to perform a new gesture and DIABLO’s recognition of the gesture was considered within a pilot’s
response time, predictable, and not a hindrance to the performance of the task. Finally, the sources of error were
expected and their impact within the confines of the formal evaluations was kept to a minimum.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075

American Institute of Aeronautics and Astronautics
22
VIII. Acknowledgements
The work described herein was conducted as part of an Office of the Secretary of Defense and Office of Naval
Research Phase II SBIR program. The authors acknowledge the support for the U.S. Navy technical point of contact,
CDR Brent Olde. Furthermore, the authors acknowledge the significant contributions of the NAS Patuxent River
Manned Flight Simulator team with specific recognition Dr. Stephen Naylor, Elizabeth Knoblauch and Alan Taylor
without whom this work would not have been possible. The findings and conclusions in this paper are those of the
authors and do not necessarily represent the views of the funding agency.
IX. References
1. http://www.navy.mil/submit/display.asp?story_id=71011
2. http://www.gizmag.com/x-47b-unmanned-stealth-fighter-uss-truman/25448/
3. L. Venetsky, M. Husni, and M. Yager, "Gesture Recognition for UCAV-N Flight Deck Operations Problem
Definition," Naval Air Systems Command, Lakehurst, NJ, Final Report January 23, 2003.
4. S. C. H. Hoi, J. Wang, and P. Zhao, “LIBOL: A Library for Online Learning Algorithms,” Journal of Machine
Learning Research, Vol. 15, 2014, pp. 495-499, http://libol.stevenhoi.org/.
Dow
nloa
ded
by D
avid
Kly
de o
n Ja
nuar
y 13
, 201
8 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
018-
0075