Final Presentation. The Team Competition Overview Design Constraints & Improvements System...
57
SECON 2013 Final Presentation
-
Upload
henry-foster -
Category
Documents
-
view
214 -
download
0
Transcript of Final Presentation. The Team Competition Overview Design Constraints & Improvements System...

SECON 2013
Final Presentation

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

THE TEAM
Jackson KnottElectrical Engineer• Hardware Packaging• Navigation
Brian LampkinElectrical Engineer• PCB Design• Vision
Ian TurnipseedElectrical Engineer• Hardware
Packaging• Vision
Matt WilliamsElectrical Engineer• Hardware Packaging• Website
John MorrisonElectrical Engineer• Hardware
Packaging• Navigation
Matt WattsElectrical Engineer• PCB Design• Navigation
Dr. Robert ReeseAdvisor

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

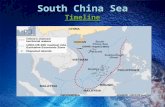
THE COURSE
1) Starting Zone2) Loading Zone3) Sea Delivery Zone4) Rail Delivery Zone5) Air Delivery Zone

COMPETITION FORMAT
Qualifying RoundDrive One Foot Forward
Preliminary RoundsThree 5 Minute RunsScore will be Sum of the Three
RunsTop 8 Teams Advance
Final RoundsSingle-Elimination BracketSeeding based on Preliminary
Standings

QUALIFYING ROUND
Four Available Practice Courses

SCORING
Rail Cargo (Six Blocks) 50 Points: Correct Size 100 Points: Correct Color
Sea Cargo (Six Blocks) 50 Points: Correct Size 100 Points: Correct Color
Air Cargo (Two Blocks) 350 Points: Correct Size 100 Points: Correct Color
Deductions 20 Points: Wrong
Zone

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

Type Name
Manufacturability Modular Design
Sustainability Battery Life
DESIGN CONSTRAINTS - PRACTICAL

MANUFACTURABILITY
Modular Design PCB
LayoutPopulation
ChassisLayout Optimization

MANUFACTURABILITY
PCB Layout and Population PIC24 Breakout Board Headers/Locking Connectors

MANUFACTURABILITY
Chassis Layout Optimization
Battery Compartment
Molex Battery Connection

MANUFACTURABILITY
Chassis Layout Optimization Battery Terminal Strip

MANUFACTURABILITY
Chassis Layout Optimization Cable Tray for Routing

MANUFACTURABILITY
Chassis Layout Optimization Wheels Grippers

SUSTAINABILITY
Maximum Battery Life Average Current draw for the
system is 2.3 A Battery Rating is 4400 mAh Therefore, Overall Battery
life is about 2 hours.

SUSTAINABILITY
Through testing, we found that the battery performance dropped after 20-30 minutes of use.
To obtain the highest possible performance throughout the SECON Hardware Competition, the battery packs were charged following each run.

Name Description
Multiple Block Carrier
The robot must carry the maximum allowed number of blocks.
Navigation The robot must navigate the course autonomously.
Detection The robot must detect color and size of blocks and spaces.
Speed The robot must travel at a speed of 0.4 feet/second.
Size The robot must be no larger in size than 12”x12”x16”[1]
DESIGN CONSTRAINTS - TECHNICAL

MULTIPLE BLOCK CARRIER
Two Claws Two Servo Motors for Each
GripperArm Upright/Arm LoweredClaw Opened/Claw Closed
Same Side Alignment for Each Gripper

MULTIPLE BLOCK CARRIER
Arm UprightPeriod High = 1400
µs
Arm LoweredPeriod High = 2350
µs

MULTIPLE BLOCK CARRIER
Gripper Opened
Period High = 1800 µs
Gripper Closed
Period High = 600 µs

NAVIGATION
Autonomous Infrared Distance Sensing Encoders

NAVIGATION
Infrared Distance Sensor Testing
0 0.5 1 1.5 2 2.50
2
4
6
8
10
12
14
f(x) = − 1.18497448028744 x³ + 6.93058969354016 x² − 14.7408192713436 x + 13.2485638848871
Voltage
Dist
ance
to W
all

NAVIGATION
Encountered Issue

NAVIGATION
Design Improvement Extra IR Sensors Added for Precise
Navigation

DETECTION
Mini-ITX and Camera Camera Ignores White and Black Detect Size and Color of
Blocks/Zones Serial Communication with
PIC24

DETECTION
Size: 2 RGB: 231,123,99

DETECTION
Brown and Green Filters

DETECTION
Sliders to control detection zones

DETECTION
Design Improvement Camera Mount
Locking 5 Degrees of
Freedom Light Source
Illuminates Blocks/Zones
Servo-Deployed Hood
Blocks Ambient Light

SPEED
Minimum Speed of 0.4 feet/sec. At 12 Volts, motors perform at 150 RPMWheel Diameter (d) = 90 mm.Circumference (c) = πd = 282.6Distance per Minute = c*RPM = 42,390
mm/min.Distance per Second = 706.5 mm/sec. =
2.32 ft/sec.

SPEED
Drive Motor TestingFor a Speed of 0.4 ft/sec, motors must run at
17.2%
Required for Task Completion Fast Speed (40% Duty Cycle)

SIZE
Robot must fit within a 12”x12”x16” Volume
12”
16”

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

SYSTEM TESTING
Integration of all Subsystems Ensure that the Robot can do the
following: Avoid Walls Detect a Block Pick Up/Set Down a Block Match a Block with Correct Loading
Zone

SYSTEM TESTING
Calibration for Competition Courses

SYSTEM TESTING
Preparing for Preliminary Run

SYSTEM TESTING
Vision System Preparation

SYSTEM TESTING
Round Beginning

SYSTEM TESTING
Approaching the Drop Zone with Blocks

SYSTEM TESTING
Preparing for Delivery

SYSTEM TESTING
The Delivery

PRELIMINARY RESULTS
1) Western Carolina University – 4950 Points2) University of Alabama – 1700 Points3) University of Evansville (IN) – 1440 Points
4) Mississippi State University – 1150 Points
5) FAMU/FSU – 840 Points6) UNC-Asheville – 800 Points7) North Carolina A&T – 710 Points8) Tennessee Tech University – 650 Points

FINAL RESULTS
T5) Mississippi State

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

January February March April
PCB Population
System Testing
Packaging
Debugging & Optimization
Competition
TIMELINE

OUTLINE
The Team Competition Overview Design Constraints &
Improvements System Testing Timeline Bill of Materials

BILL OF MATERIALS

BILL OF MATERIALS

BILL OF MATERIALS
Item Cost
Computer ~$270
14.8V/4400mAh Battery ~$80
(2) 67:1 Metal Gearmotors w/ Encoders & Wheels
~$75
(6) Servo-Motors (Arm, Claw, Hood) ~$180
(5) Infrared Distance Sensors ~$75
(4) Robotic Claws ~$40
(2) Front Wheel Casters ~$10
Camera w/ Telescoping Rod ~$70
Lights ~$5
Fan Cables ~$30
Printed Circuit Board w/ Fabrication ~$200
Course Construction ~$150
Miscellaneous Hardware Materials ~$50

BILL OF MATERIALS
Unit Subtotal: ~$1235 Spares & Other Necessities: ~$365 Final Project Cost: ~$1600

[1] IEEE SoutheastCon 2013 Hardware Competition. Final Version. 11 Sep. 2012. http://ewh.ieee.org/reg/3/southeastcon2013/documents/Final_SECON_2013_Hardware_Rules.pdf
REFERENCES

Questions

IAN TURNIPSEED
YEE-HAW
RIDE ‘EM Cowboy

PREPPING FOR THE FINALS
Crack is
Whack
Watch out for
that seagull

AT THE BANQUET
Shhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhh
hhhhh
We’re all
adults now