Filtros de Kalman en hidrología : predicciones de ...a... · fil tros de kalman en hidrologia:...
38
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/44413972 Filtros de Kalman en hidrología : predicciones de descargas fluviales para la operación óptima de embalses / Juan B. Valdés... Article Source: OAI CITATION 1 READS 135 3 authors, including: Some of the authors of this publication are also working on these related projects: NASA-USAID SERVIR Project (Africa-Arizona Team) View project Detección de puntos de cambios múltiples en series hidrológicas View project Juan B. Valdes The University of Arizona 186 PUBLICATIONS 3,669 CITATIONS SEE PROFILE All content following this page was uploaded by Juan B. Valdes on 24 April 2014. The user has requested enhancement of the downloaded file.
Transcript of Filtros de Kalman en hidrología : predicciones de ...a... · fil tros de kalman en hidrologia:...
Seediscussionsstatsandauthorprofilesforthispublicationathttpswwwresearchgatenetpublication44413972
FiltrosdeKalmanenhidrologiacuteaprediccionesdedescargasfluvialesparalaoperacioacutenoacuteptimadeembalsesJuanBValdeacutes
Article
SourceOAI
CITATION
1
READS
135
3authorsincluding
Someoftheauthorsofthispublicationarealsoworkingontheserelatedprojects
NASA-USAIDSERVIRProject(Africa-ArizonaTeam)Viewproject
DeteccioacutendepuntosdecambiosmuacuteltiplesenserieshidroloacutegicasViewproject
JuanBValdes
TheUniversityofArizona
186PUBLICATIONS3669CITATIONS
SEEPROFILE
AllcontentfollowingthispagewasuploadedbyJuanBValdeson24April2014
Theuserhasrequestedenhancementofthedownloadedfile
FIL TROS DE KALMAN EN HIDROLOGIA PREDICCIONES DE DESCARGAS FLUVIALES PARA LA OPERACION OPTIMA DE EMBALSES
Juan B ValdM
JesOs M Velazquez
Ignacio Rodrfguez-Iturbe
Informe Tecnico N 80 - 2
Septlembre de 1980
UNIVERSIDAD SIMON BOLIVAR Decanato Estudios de Postgrado
Postgrado en Planificaci6n e Ingenierla de Recursos Hldricos
~
( - 1 shy
AGRADECIMIENTOS
Los resultados que se presentan en este informe provienen
del Proyecto Filtros de Kalman en Hidrologa Predicciones de Descargas Fluviales para la Operacion Optima de Embalses fi shy
nanciado parcialmente p~r el CONICIT bajo el Ndeg Sl-O~49 La i~
presion de este informe fue pOsible mediante un subsidio del
CONICIT Ambas contribuciones se agradecen profundamente
I Introducci6n
Uno de los problemas m~s importantes en hidrologa es la
predicci6n de caudales en tiempo real Para poder realizar esta
predicci6n es necesario postular una relaci6n causal entre la
precipitaci6n en varios puntos de la cuenca en diferentes
instantes de tiempo y el caudal medio en un da determinado
Esta relaci6n causal se la denomina funci6n de respuesta de la
cuenca y pondera las contribuciones individuales de precipitashy
cion de cada sector de la cuenca en la escorrenta Una vez
postulada esta relacion causal 0 sea esta funci6n de respuesta
teorica sus componentes deben ser evaluados p~r medio de un
metodo de estimacion
La funci6n de respuesta puede tomar diversas formas se la
puede suponer totalmente como un modelo de caja-negra 0 puede
describir el proceso lluvia-escorrenta con gran detalle la reshy
lacion puede ser totalmente determinstica 0 estoc~stica 0 una
combinacion de ambas lineal 0 no lineal variante 0 invariante
en el tiempo etc
Una de las funciones de respuesta m~s utilizadas en hidroshy
logfa es el hidrograma unitario propuesto originalmente por
Sherman (1932) El hidrograma unitario es una funci6n de respue~
ta lineal e invariante enel tiempo
La aplicaci6n de modelos de caja negra basados en la teoshy
rfa del an~lisis de sistemas para la simulacion de las series de
~
P1igina
I 11 Introduccion 1
12 Revision de la literatura 7 II El filtro de Kalman-Bucy 10
21 Descripci6n teorica del filtro 10 22 Procedimiento para la evaluaci6n
de ~(t+llt+l) y ~(t+1It+l) 13 III Aplicaciones del filtro de Kalman a
hidrologa 16
31 Evaluaci6n de la funci6n de resshypuesta de una cuenca 16
32 Predicci6n en tiempo real de caudales
19 33 Algunas extensiones del modelo 24
IV Extensiones al modelo de Predicci6n en tiel1po real de caudales 32 41 Seleccion de la estructura del filtro
de Kalman usando teora Bayesiana 34 42 Modelo de Prediccion con Multiples
Estados 48
43 Aplicaciones del modelo de Multiples Estados
59 REFE RENClAS
67
2
cauda1es ha sido muy intensa en la ~ltima decada Bajo este esshy
quema las variables de entrada al esquema son relacionadas con
las variables de salida del mismo por medio de la funci6n de
respuesta del sistema la cual es frecuentemente usada para preshy
dicci6n yo simulacion
Dooge (1973) da una buena sntesis de los diferentes enfoshy
ques utilizados para la evaluaci6n de esta funcion de respuesshy
tao
Puesto que las funciones de respuesta a ser ev~luadas por
los diferentes modelos de predicci6n 0 utilizan el hidrograma
unitario 0 son una extension de el se describir1i en esta Introshy
ducci6n con algo de deta11e su metodo de estimaci6n
Supongamos que una tormenta determinada de duraci6n T ti~
ne un hietograma de la forma mostrada en la Figura 11 La canshy
tidad de lluvia cada en la cuenca durante el perodo dT es
igual a
P (T) i () dTA (1-1)
donde
A area de 1a cuenca
i() intensidad promedio en el intervalo
(T T+dT)
P (T) l1uvia cada en e1 intervalo (TT+dT)
La contribuci6n de PIT) al escurrimiento en el intervalo
t es la siguiente
__
bull iI
-3shy
- 4 shy
ltf
q (t) P (T)U(t-TT)
(l -2)i(T)U(t-T) d I (t I
donde
porci6n del caudal total escurrido en el
intervalo t debido a la precipitaci6n peT)
q (t)
u (t-T T) ordenada de la funci6n de respuesta (hidrpound
1 grama unitario) para una tormenta de durashy
ci6n T que relaciona get) con P(T)
Debido a la suposici6n de que el sistema es lineal se pueshy
de utilizar e1 principio de superposici6n para determinar el capound
dal escurrido en el perfodo t
Por 10 tanto
Q(t) A li(T) u(t-TT) d (1- 3)=--_~I o
donde
QOI Q(t) caudal total escurrido en el tiempo t
La ecuaci6n (1~3) es la conocida integral de convoluci6n de
Duhamel Si la precipitaci6n se representa en una forma discreta
la integral de la ecuaci6n (1-3) se reduce a una sumatoria 0
seaQ(t) t
Q(t) A E i(r) ult-rT) 61 (l-4a) y=o La ecuac16n (1-4) se puede representar en forma matricial
FIGURA If INFLUENCIA DE LA PRECIPITACION DEL
INTERVALo 1i EN EL ESCURRIMIENTO EN EL INTERVA LO
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
FIL TROS DE KALMAN EN HIDROLOGIA PREDICCIONES DE DESCARGAS FLUVIALES PARA LA OPERACION OPTIMA DE EMBALSES
Juan B ValdM
JesOs M Velazquez
Ignacio Rodrfguez-Iturbe
Informe Tecnico N 80 - 2
Septlembre de 1980
UNIVERSIDAD SIMON BOLIVAR Decanato Estudios de Postgrado
Postgrado en Planificaci6n e Ingenierla de Recursos Hldricos
~
( - 1 shy
AGRADECIMIENTOS
Los resultados que se presentan en este informe provienen
del Proyecto Filtros de Kalman en Hidrologa Predicciones de Descargas Fluviales para la Operacion Optima de Embalses fi shy
nanciado parcialmente p~r el CONICIT bajo el Ndeg Sl-O~49 La i~
presion de este informe fue pOsible mediante un subsidio del
CONICIT Ambas contribuciones se agradecen profundamente
I Introducci6n
Uno de los problemas m~s importantes en hidrologa es la
predicci6n de caudales en tiempo real Para poder realizar esta
predicci6n es necesario postular una relaci6n causal entre la
precipitaci6n en varios puntos de la cuenca en diferentes
instantes de tiempo y el caudal medio en un da determinado
Esta relaci6n causal se la denomina funci6n de respuesta de la
cuenca y pondera las contribuciones individuales de precipitashy
cion de cada sector de la cuenca en la escorrenta Una vez
postulada esta relacion causal 0 sea esta funci6n de respuesta
teorica sus componentes deben ser evaluados p~r medio de un
metodo de estimacion
La funci6n de respuesta puede tomar diversas formas se la
puede suponer totalmente como un modelo de caja-negra 0 puede
describir el proceso lluvia-escorrenta con gran detalle la reshy
lacion puede ser totalmente determinstica 0 estoc~stica 0 una
combinacion de ambas lineal 0 no lineal variante 0 invariante
en el tiempo etc
Una de las funciones de respuesta m~s utilizadas en hidroshy
logfa es el hidrograma unitario propuesto originalmente por
Sherman (1932) El hidrograma unitario es una funci6n de respue~
ta lineal e invariante enel tiempo
La aplicaci6n de modelos de caja negra basados en la teoshy
rfa del an~lisis de sistemas para la simulacion de las series de
~
P1igina
I 11 Introduccion 1
12 Revision de la literatura 7 II El filtro de Kalman-Bucy 10
21 Descripci6n teorica del filtro 10 22 Procedimiento para la evaluaci6n
de ~(t+llt+l) y ~(t+1It+l) 13 III Aplicaciones del filtro de Kalman a
hidrologa 16
31 Evaluaci6n de la funci6n de resshypuesta de una cuenca 16
32 Predicci6n en tiempo real de caudales
19 33 Algunas extensiones del modelo 24
IV Extensiones al modelo de Predicci6n en tiel1po real de caudales 32 41 Seleccion de la estructura del filtro
de Kalman usando teora Bayesiana 34 42 Modelo de Prediccion con Multiples
Estados 48
43 Aplicaciones del modelo de Multiples Estados
59 REFE RENClAS
67
2
cauda1es ha sido muy intensa en la ~ltima decada Bajo este esshy
quema las variables de entrada al esquema son relacionadas con
las variables de salida del mismo por medio de la funci6n de
respuesta del sistema la cual es frecuentemente usada para preshy
dicci6n yo simulacion
Dooge (1973) da una buena sntesis de los diferentes enfoshy
ques utilizados para la evaluaci6n de esta funcion de respuesshy
tao
Puesto que las funciones de respuesta a ser ev~luadas por
los diferentes modelos de predicci6n 0 utilizan el hidrograma
unitario 0 son una extension de el se describir1i en esta Introshy
ducci6n con algo de deta11e su metodo de estimaci6n
Supongamos que una tormenta determinada de duraci6n T ti~
ne un hietograma de la forma mostrada en la Figura 11 La canshy
tidad de lluvia cada en la cuenca durante el perodo dT es
igual a
P (T) i () dTA (1-1)
donde
A area de 1a cuenca
i() intensidad promedio en el intervalo
(T T+dT)
P (T) l1uvia cada en e1 intervalo (TT+dT)
La contribuci6n de PIT) al escurrimiento en el intervalo
t es la siguiente
__
bull iI
-3shy
- 4 shy
ltf
q (t) P (T)U(t-TT)
(l -2)i(T)U(t-T) d I (t I
donde
porci6n del caudal total escurrido en el
intervalo t debido a la precipitaci6n peT)
q (t)
u (t-T T) ordenada de la funci6n de respuesta (hidrpound
1 grama unitario) para una tormenta de durashy
ci6n T que relaciona get) con P(T)
Debido a la suposici6n de que el sistema es lineal se pueshy
de utilizar e1 principio de superposici6n para determinar el capound
dal escurrido en el perfodo t
Por 10 tanto
Q(t) A li(T) u(t-TT) d (1- 3)=--_~I o
donde
QOI Q(t) caudal total escurrido en el tiempo t
La ecuaci6n (1~3) es la conocida integral de convoluci6n de
Duhamel Si la precipitaci6n se representa en una forma discreta
la integral de la ecuaci6n (1-3) se reduce a una sumatoria 0
seaQ(t) t
Q(t) A E i(r) ult-rT) 61 (l-4a) y=o La ecuac16n (1-4) se puede representar en forma matricial
FIGURA If INFLUENCIA DE LA PRECIPITACION DEL
INTERVALo 1i EN EL ESCURRIMIENTO EN EL INTERVA LO
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
~
( - 1 shy
AGRADECIMIENTOS
Los resultados que se presentan en este informe provienen
del Proyecto Filtros de Kalman en Hidrologa Predicciones de Descargas Fluviales para la Operacion Optima de Embalses fi shy
nanciado parcialmente p~r el CONICIT bajo el Ndeg Sl-O~49 La i~
presion de este informe fue pOsible mediante un subsidio del
CONICIT Ambas contribuciones se agradecen profundamente
I Introducci6n
Uno de los problemas m~s importantes en hidrologa es la
predicci6n de caudales en tiempo real Para poder realizar esta
predicci6n es necesario postular una relaci6n causal entre la
precipitaci6n en varios puntos de la cuenca en diferentes
instantes de tiempo y el caudal medio en un da determinado
Esta relaci6n causal se la denomina funci6n de respuesta de la
cuenca y pondera las contribuciones individuales de precipitashy
cion de cada sector de la cuenca en la escorrenta Una vez
postulada esta relacion causal 0 sea esta funci6n de respuesta
teorica sus componentes deben ser evaluados p~r medio de un
metodo de estimacion
La funci6n de respuesta puede tomar diversas formas se la
puede suponer totalmente como un modelo de caja-negra 0 puede
describir el proceso lluvia-escorrenta con gran detalle la reshy
lacion puede ser totalmente determinstica 0 estoc~stica 0 una
combinacion de ambas lineal 0 no lineal variante 0 invariante
en el tiempo etc
Una de las funciones de respuesta m~s utilizadas en hidroshy
logfa es el hidrograma unitario propuesto originalmente por
Sherman (1932) El hidrograma unitario es una funci6n de respue~
ta lineal e invariante enel tiempo
La aplicaci6n de modelos de caja negra basados en la teoshy
rfa del an~lisis de sistemas para la simulacion de las series de
~
P1igina
I 11 Introduccion 1
12 Revision de la literatura 7 II El filtro de Kalman-Bucy 10
21 Descripci6n teorica del filtro 10 22 Procedimiento para la evaluaci6n
de ~(t+llt+l) y ~(t+1It+l) 13 III Aplicaciones del filtro de Kalman a
hidrologa 16
31 Evaluaci6n de la funci6n de resshypuesta de una cuenca 16
32 Predicci6n en tiempo real de caudales
19 33 Algunas extensiones del modelo 24
IV Extensiones al modelo de Predicci6n en tiel1po real de caudales 32 41 Seleccion de la estructura del filtro
de Kalman usando teora Bayesiana 34 42 Modelo de Prediccion con Multiples
Estados 48
43 Aplicaciones del modelo de Multiples Estados
59 REFE RENClAS
67
2
cauda1es ha sido muy intensa en la ~ltima decada Bajo este esshy
quema las variables de entrada al esquema son relacionadas con
las variables de salida del mismo por medio de la funci6n de
respuesta del sistema la cual es frecuentemente usada para preshy
dicci6n yo simulacion
Dooge (1973) da una buena sntesis de los diferentes enfoshy
ques utilizados para la evaluaci6n de esta funcion de respuesshy
tao
Puesto que las funciones de respuesta a ser ev~luadas por
los diferentes modelos de predicci6n 0 utilizan el hidrograma
unitario 0 son una extension de el se describir1i en esta Introshy
ducci6n con algo de deta11e su metodo de estimaci6n
Supongamos que una tormenta determinada de duraci6n T ti~
ne un hietograma de la forma mostrada en la Figura 11 La canshy
tidad de lluvia cada en la cuenca durante el perodo dT es
igual a
P (T) i () dTA (1-1)
donde
A area de 1a cuenca
i() intensidad promedio en el intervalo
(T T+dT)
P (T) l1uvia cada en e1 intervalo (TT+dT)
La contribuci6n de PIT) al escurrimiento en el intervalo
t es la siguiente
__
bull iI
-3shy
- 4 shy
ltf
q (t) P (T)U(t-TT)
(l -2)i(T)U(t-T) d I (t I
donde
porci6n del caudal total escurrido en el
intervalo t debido a la precipitaci6n peT)
q (t)
u (t-T T) ordenada de la funci6n de respuesta (hidrpound
1 grama unitario) para una tormenta de durashy
ci6n T que relaciona get) con P(T)
Debido a la suposici6n de que el sistema es lineal se pueshy
de utilizar e1 principio de superposici6n para determinar el capound
dal escurrido en el perfodo t
Por 10 tanto
Q(t) A li(T) u(t-TT) d (1- 3)=--_~I o
donde
QOI Q(t) caudal total escurrido en el tiempo t
La ecuaci6n (1~3) es la conocida integral de convoluci6n de
Duhamel Si la precipitaci6n se representa en una forma discreta
la integral de la ecuaci6n (1-3) se reduce a una sumatoria 0
seaQ(t) t
Q(t) A E i(r) ult-rT) 61 (l-4a) y=o La ecuac16n (1-4) se puede representar en forma matricial
FIGURA If INFLUENCIA DE LA PRECIPITACION DEL
INTERVALo 1i EN EL ESCURRIMIENTO EN EL INTERVA LO
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
~
P1igina
I 11 Introduccion 1
12 Revision de la literatura 7 II El filtro de Kalman-Bucy 10
21 Descripci6n teorica del filtro 10 22 Procedimiento para la evaluaci6n
de ~(t+llt+l) y ~(t+1It+l) 13 III Aplicaciones del filtro de Kalman a
hidrologa 16
31 Evaluaci6n de la funci6n de resshypuesta de una cuenca 16
32 Predicci6n en tiempo real de caudales
19 33 Algunas extensiones del modelo 24
IV Extensiones al modelo de Predicci6n en tiel1po real de caudales 32 41 Seleccion de la estructura del filtro
de Kalman usando teora Bayesiana 34 42 Modelo de Prediccion con Multiples
Estados 48
43 Aplicaciones del modelo de Multiples Estados
59 REFE RENClAS
67
2
cauda1es ha sido muy intensa en la ~ltima decada Bajo este esshy
quema las variables de entrada al esquema son relacionadas con
las variables de salida del mismo por medio de la funci6n de
respuesta del sistema la cual es frecuentemente usada para preshy
dicci6n yo simulacion
Dooge (1973) da una buena sntesis de los diferentes enfoshy
ques utilizados para la evaluaci6n de esta funcion de respuesshy
tao
Puesto que las funciones de respuesta a ser ev~luadas por
los diferentes modelos de predicci6n 0 utilizan el hidrograma
unitario 0 son una extension de el se describir1i en esta Introshy
ducci6n con algo de deta11e su metodo de estimaci6n
Supongamos que una tormenta determinada de duraci6n T ti~
ne un hietograma de la forma mostrada en la Figura 11 La canshy
tidad de lluvia cada en la cuenca durante el perodo dT es
igual a
P (T) i () dTA (1-1)
donde
A area de 1a cuenca
i() intensidad promedio en el intervalo
(T T+dT)
P (T) l1uvia cada en e1 intervalo (TT+dT)
La contribuci6n de PIT) al escurrimiento en el intervalo
t es la siguiente
__
bull iI
-3shy
- 4 shy
ltf
q (t) P (T)U(t-TT)
(l -2)i(T)U(t-T) d I (t I
donde
porci6n del caudal total escurrido en el
intervalo t debido a la precipitaci6n peT)
q (t)
u (t-T T) ordenada de la funci6n de respuesta (hidrpound
1 grama unitario) para una tormenta de durashy
ci6n T que relaciona get) con P(T)
Debido a la suposici6n de que el sistema es lineal se pueshy
de utilizar e1 principio de superposici6n para determinar el capound
dal escurrido en el perfodo t
Por 10 tanto
Q(t) A li(T) u(t-TT) d (1- 3)=--_~I o
donde
QOI Q(t) caudal total escurrido en el tiempo t
La ecuaci6n (1~3) es la conocida integral de convoluci6n de
Duhamel Si la precipitaci6n se representa en una forma discreta
la integral de la ecuaci6n (1-3) se reduce a una sumatoria 0
seaQ(t) t
Q(t) A E i(r) ult-rT) 61 (l-4a) y=o La ecuac16n (1-4) se puede representar en forma matricial
FIGURA If INFLUENCIA DE LA PRECIPITACION DEL
INTERVALo 1i EN EL ESCURRIMIENTO EN EL INTERVA LO
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
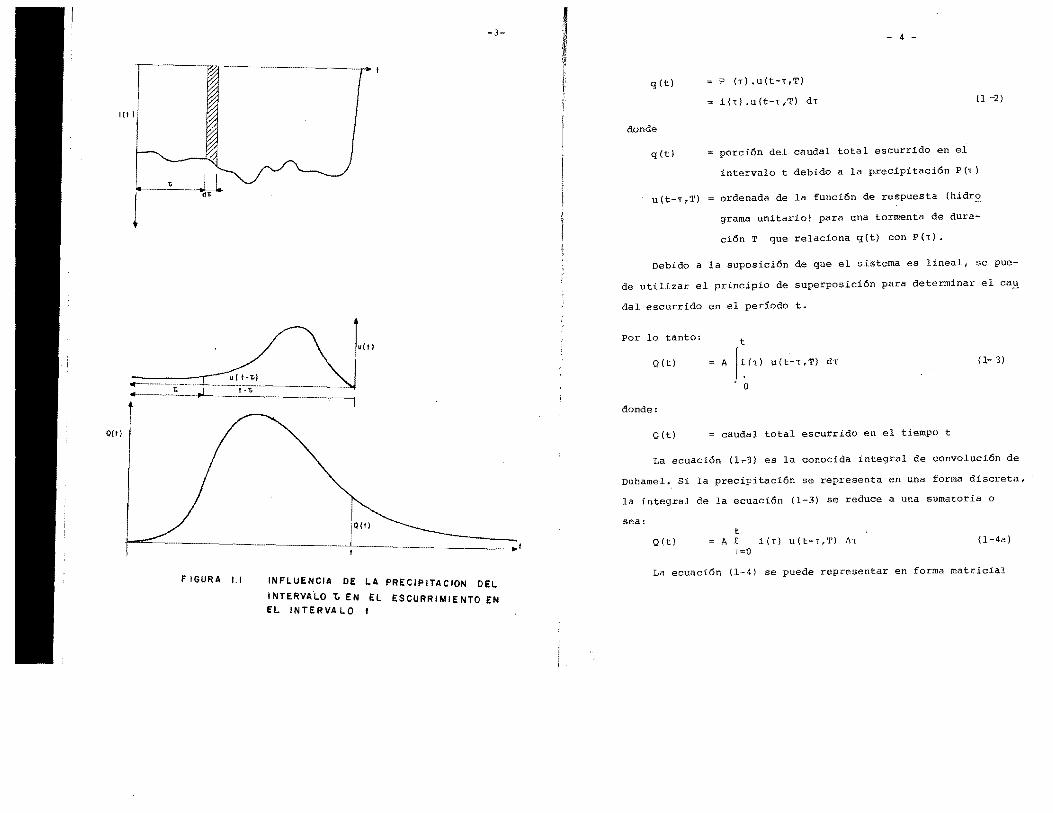
__
bull iI
-3shy
- 4 shy
ltf
q (t) P (T)U(t-TT)
(l -2)i(T)U(t-T) d I (t I
donde
porci6n del caudal total escurrido en el
intervalo t debido a la precipitaci6n peT)
q (t)
u (t-T T) ordenada de la funci6n de respuesta (hidrpound
1 grama unitario) para una tormenta de durashy
ci6n T que relaciona get) con P(T)
Debido a la suposici6n de que el sistema es lineal se pueshy
de utilizar e1 principio de superposici6n para determinar el capound
dal escurrido en el perfodo t
Por 10 tanto
Q(t) A li(T) u(t-TT) d (1- 3)=--_~I o
donde
QOI Q(t) caudal total escurrido en el tiempo t
La ecuaci6n (1~3) es la conocida integral de convoluci6n de
Duhamel Si la precipitaci6n se representa en una forma discreta
la integral de la ecuaci6n (1-3) se reduce a una sumatoria 0
seaQ(t) t
Q(t) A E i(r) ult-rT) 61 (l-4a) y=o La ecuac16n (1-4) se puede representar en forma matricial
FIGURA If INFLUENCIA DE LA PRECIPITACION DEL
INTERVALo 1i EN EL ESCURRIMIENTO EN EL INTERVA LO
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 5 shy
de la siguiente manera
Q (1) Al2(t) (h4b)
donde
l2 (tl vector de (kx1) elementos que contieshy
nen la precipitaci6n en cada instante
de tiempo desde 0 hasta t
vector de componentes del hidrograma unitario
y para todo el hidrograma de salida nos queda
A P U (1-5)
donde
P matriz cuyas columnas son los vectores de
precipitaciones desplazadas
9
La evaluaci6n de la funci6n de~espuesta en el caso lineal
e invariante en el tiempo se reduc~a la resoluci6n de un sisteshy
ma de ecuaciones algebralcas lineales para el caso discreto y la
resoluci6n de una ecuaci6n integral para el caso contfnuo
Como se mencionara antes las ecuaciones (1-3) (1-4) y (1-5)
presuponen que el sistema es lineal e invariante en el tiempo La
hip6tesis de linealidad pu~de ser 0 no apropiada dependiendo de
la cuenca en estudio Amorocho y Orlob (1961) proponen para reshy
- 6 shy
solver este problema considerar integrales de convoluci6n de
6rdenes mayores
La hip6tesis de invarianza en el tiempo est~ relacionada
con el hecho de que las ordenadas de la funci6n de respuesta
pueden cambiar durante una tormenta yo ser funci6n de los difeshy
rentes perfodos del cicIo hidro16gico de la cuenca (perfodos seshy
cas Y h~edos) Si el sistema es considerado como variante en
el tiampo la ecuaci6n (1-3) se transforma en
(1-6)Q(t) AJ~(T) u(t-TtT) dT
o
present~ndose problemas te6ricos y pr~cticos en la estimaci6n
de U(t-TtT)
Este trabajo presenta los resultados de la investigaci6n
llevada a cabo en el postgrado en Planificac16n e Ingeniera de
Recursos Hfdricos de la Universidad Sim6n Bolfvar para utl1izar
el filtro de_Kalman-Bucy (Kalman 1960 Kalman y Bucy 1961) en
la identificaci6n de la funci6n de respuesta de una cuenca su
usa posterior en la predicci6n de caudales en tiempo real y poshy
sibles soluciones a los problemas de no linealidad Y falta de
estacionaridad frecuentemente encontrada en las funciones de
respuestas hidro16gicas en el mundo real
Este informe est~ dividido en cuatro partes
i) Teorfa del filtro de Kalman
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 7 shy
ii) Formulaci6n del modelo b~sico de predicci6n
iii) Discriminaci6n de la estructura del modelo
iv) Modelo general basadoen mGltiples estados
1 2 Revision de la 11teratura
En esta secci6n se presentar~ una breve revisi6n de la liteshy
ratura solamente en 10 que eOncierne al usa del filtro de Kalman
en la predicei6n de deseargas fluviales en particular su usa en
tiempo real Una descripci6n m~s detallada puede eneontrarse en
Rodriguez-Iturbe y otros (1978) En los Gltimos anos se han proshy
puesto un gran ntimero de metodos para la utilizaci6n del filtro
de Kalman en predicci6n Dos muestras de ella son el Workshop
Recent Developments in Real-Time Forecasting and Control of
Water Resource Systems organizado por el International Institute
for Applied System AnalYSis (IIASA) en Laxenburg Austria (1976)
y la Conferencia Chapman sobre Applications of Kalman Filter to
Hydraulics Hydrology and Water Resources organizada en la Unishy
versidad de Pittsburgh (1978)
El procedimiento mas freeuentemente utilizado en tiempo
real es el uso de modelos de regresi6n con una estimaci6n recurshy
siva de sus par~metros 0 sea el caudal pronostieado para el peshy
riodo t es expresado como una funci6n lineal de caudales observashy
dos en intervalos de tiempos anteriores Ylo de precipitaci6n
Los par~metros son recursivamente estimados por medio deminimos
cuadrados (Kashyap y Rao 1973 1~74) En este enfoque esta imshy
- 8 shy
plicito que las observaciones son sin errores y que la secuenshy
cia de errores del modelo de regresi6n es rUido blanco estacioshy
nario Una ramificaci6n de este enfoque usando el filtro de Kalshy
man fue propuesto por Hino (1973) y se basa en la estimaci6n del
hidrograrna unitario instantaneo (HUI) En este enfoque el estado
del sistema es el HUI discretizado de la cuenca en vez de los
caudales La ecuaci6n de estado esta dada por un camino aleatoric
(random walk) con estadisticas conocidas El enfoque usa en
la ecuaci6n de mediei6n una correlaci6n discreta de las entradas
(precipitaci6n) con la funei6n de respuesta del sistema (el HUI)
y se supone conocido el error de medieion Si el estado del sisshy
tema se supone constante el metodo se reduce a una estimaei6n
recursiva por minimos cuadrados de las ordenadas del HUI Una
extensi6n de este enfoque fue desarrollado en la Universidad
Simon Bolivar y se presenta en detalle en este informe ~odr1guez-
Iturbe y otros 1978 Valdes y otros 1978 Vel~zquez 1980)
Otra extensi6n del metodo fue propuesta por sz8110si-Nagy (1975)
en la eual se usa un algoritmo recursivo sub-6ptimo para la esshy
timaci6n de las estadisticas de los terminos de error en las
ecuaciones de estado y en la de medici6n Todini y Bouillot
(1975) han propuesto un model ARMA lineal e invariante cayos
parametros son estimados por medio de un filtro de Kalman Este
modelo fue posteriormente mOdificado para tener en euenta la no
linealidad del sistema por medio de un umbral basado en el 1nshy
dice de precipitaci6n antecedente (API) (Todini y otros 1976)
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 9 -
Katayama (1976) us6 estimaci6n p~r m~xima verosimilitud para evashy
luar los par~metros de un modelo ARMA junto con el criterio de
informaci6n de Akaike (1974ab) para elegir el orden del modelo
Por su parte Ivakhnenko (196819701971) ha propuesto un m6shy
todo heur1sticQ el Group Method of Data Handling (GMDH) el cual
evita la selecci6n a priori de la estructura del modelo y fue us~
doen simulaci6n hidro16gica por Ikeda y sawaragi (1976) El comshy
portamiertto del sistema se descubre por medio de una serie de
Volterra Un enfoque m~s basado en la f1sica del proceso fue proshy
puesto por Lorent (1976)
Todos los modelos presentados hasta ahora son modelos basados
en la teor1a de sistemas El anico trabajo en el rea de modelos
conceptuales de lluvia-escorrentla es el realizado p~r Kitanidis
y Bras (1978) en e1 cua1 el modelo del National Weather Service
es operado ffon Line ff usando el filtro de Kalman para la estimacion
de los contenidos de humedad en los diversos componentes del moshy
delo Las predicciones realizadas de esta manera son sensiblemenshy
te superiores a la operacion del modelo NWS off line es decir
sin usar el filtro
- 10 shy
El filtro de Kalman-BUCYII
En este capitulo se har~ una descripcion te6rica general
del filtro de Kalman Y de su soluci6n para que en los proximos 1a
captulos se presenten sus aplicaciones en hidrolog bull
Descripci6n te6rica del filtro21
El filtro de Kalman estsect basado en dos ecuaciones 1a pri shy
que representa la din~ica mera eS la ecuaci6n de diferencias
del proceso y se puede escribir en la siguiente forma
~cuacion de diferenciasi)
(21) ~ (tl~(tl + ~ (t) ~(tl +~(t)i(tl
~ (t+l)
donde Vector (nxl) que representa el estado
~ (t+1)
del sistema en el tiempo t+l
idem a ~ (t+l) pero en el intervalo t ~ (tl
Vector (mx1) que representa las entradasget)
del control del sistema
vector (pxl) que representa el ruido ~(tl
del sistema descrito en la ecuaci6n (21)
son matrices conocidas de dimensioshy~(t) BCt) y ~(t)
nes apropiadas
La segunda ecuaci6n eS la de medicion que representa las
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 11 shy
observaclones que miden el estado del sistema
ii) Ecuaci6n de medici6n
~(t) f(t) ~(t) + 1(t) (2-2)
donde
~(t) Vector (rxl) que contiene las medicloshy
nes actuales del estado del sistema
~(t) Vector (rxl) que representa el ruido
en las mediciones
f(t) Matriz conocida de dimensiones apropi~
das
Con estas dos ecuaciones el filtro de Kalman trata de obshy
tener un estimador 6ptimo en el sentido de una menor varianza
ae predicci6n del estado del sistema ~ (tit) basado en las
observaciones pasadas del estado del sistema
~(t) (l) (2) bullbullbullbull(t) (2-3)
Y dei vector de control de e~tradas
U(t-l) U(l) U(2) bullbullbullbullbull bullbullbullbull UCt-I) (2-4)
Este estimador 6ptimo de ~ 6 ~Ct) se define como la media
de la distribuci6n condicional de (t) dados ~(t) y Q(t-l) 0
sea
(tlt) = E ~(t) I(t) Q(t-l) (215)
donde el termino (tit) indica-que se ha usado toda la inshy
- 12 shy
formaci6n disponible hasta el tiempo t en la obtenci6n del esti shy
mador del estado del sistema
Para obtener (tit) es necesario hacer las siguientes hishy
p6tesis
i) El estado inicial ~(O) es un vector (nxl) de componentes
aleatorios norrnalmente distribuidos con media conocida ~ (0) y
matriz de covarianza conocida L (0)0 sea
E ~(O) = ~ (D) (2-6a)
Cov ~(O)I~(O)= ~(O) (2-6b)
ii) El vector S (t) esti compuesto por p elementos aleatorios
distribuidos normalmente con media cero e independientes en el
tiampo Su varianza as necesario definirla a traveuros de la matriz
de covariancia ~ (t) que tiene las siguientes caracteristlcas
Cov ~(t)I~(T) = ~(t)Ot (2-7)
donde
es el delta de Kroenecker que es
otT o cuando t 4 T
otT 1 cuando t T
iii) El vector ~(t) esti formado de (rxl) elementos aleatorios
normalmente dlstribufdos con media cer~ y con matriz de covarian
cia a ser definida de acuerdo con las siguientes caracteristicas
cova (t) a (t) II (t) 0 (2-8)
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 13 shy
iv) ~(t) Y aCT) se asurnen mutuamente independientes para todos
los valores de t y T
v) El vector get) es una secuencia deterministica conocida
vi) Las matrices ~(t) ~(t) pound(t) y L(t) son todas determintsti shy
ticas y especificadas de antemano
Estas sets hip6tesis junto con la linealidad de las ecuashy
ciones (2-1) y (2-2) implican que la distribuci6n de probabilidad
del estado del sistema ~(t) condicional en ~(t) y g(t-1) es
Gaussiana y por 10 tanto se 10 puede definir totalmente por sus
dos primeros momentos 0 sea
E ~(t) I~(t) g(t-1) ~(tlt) (2-9a)
Var ~(t) I(tl g(t-I) 1(tlt) (2-9b)
El filtro de Kalman es un algoritmo poderoso que puede ser
usado para evaluar ~(tlt) y 1(tlt) en cada intervalo de tiempo y
actualiz~ndolo cuando se disponga de nuevas mediciones ~(t) sobre
el estado del sistema ~(t) bull
22 Procedimiento para la evaluaci6n de x(t+ilt+1) y E(t+1It+l)
A continuaci6n se dar~n las ecuaciones para actualizar los
estimadores de los momentos de la distribuci6n de x(t+1) es decir
su media ~(t+1) y su variancia 1(t+1) Esta actualizaci6n se reashy
liza en dos oportunidades antes y despu~s de 1a observaci6n de
~(t)
- 14 shy
Evaluaci6n de Ii matriz condicional de covariancia E(tlt) i)
_ lnicializaci6n en t=O (2-10)
1(010) = 1(0)
Ecuaci6n de predicci6n de la matriz de covariancia
( 2-11)1(t+1I t ) = ~(t) 1(tlt)~(t)+k(t) ~(t) k(t)
Ecuaci6n de actualizaci6n de la matriz de covarianza
1(t+1 It) - 1(t+llt)1(t+1 It+1)
pound(t+l) pound(t+l) 1(t+llt)pound (t+l) +
(2-12a)n(t+1)-1 pound(t+1) 1(t+1I t )
Ganancia del filtro (2-I2b)(t+l)~(t+1) = 1(t+1It+1) pound (t+1)
Evaluaci6n de la media condicional x(t+Ilt+l)11)
_ Inicializaci6n en t=O
(2-13) ~(010) = ~ (0)
Ecuaci6n de predicci6n de la media
(2-14)(t+IJt) = ~(t) i(tlt) + (t)g(t)
Clculo de los residuos (innOvaciones)
(2-15)pound(t+I)= ~(t+1) - pound(t+l)g(t+1I t )
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 15 shy
Actualizaci6n de la evaluaci6n de la media
i(t+llt+l) = i(t+llt) + ~(t+l) ~(t+l) (2-16)
Con este procedimiento se van evaluando en cada intervalo
los dos primeros momentos de la distribuci6n condicional del e~
tado del sistema antes y despues de realizar mediciones sobre
el estado del mismo
La recursividad del filtro de Kalman permite actualizar rshy
pidamente las estimaciones del vector de medias y la matriz de
covarianza del estado del sistema puesto que toda la informaoi6n
bsica est representada en la media y covariancia del estado
del sistema en el intervalo de tiempo anterior Ms aUn eligienshy
do los estimadores de ~(t) de la forma senalada anteriormente
estamos garantizando la elecci6n de un estimador de ~(t) con la
mnima varianCia
Por supuesto esta condici6n de optimalidad se cumple si
todas las hip6tesis hechas se verifican en la aplicaci6n del
filtro
- 16 shy
III - Aplicaoiones del filtro de Kalman a hidrologa
En este captulo se detallarn algunas de las aplicaciones
que puede tener el filtro de Kalman en hidrologa poniendose e~
pecial enfasis en la predicci6n de caudales en tiempo real facshy
tor indispensable para realizar una operaci6n 6ptima en una obra
hidralHica
Los dos aspectos a ser considerados son
i) Identificaci6n de la funci6n de respuesta de una
cuenca es decir su hidrograma unitario
il) Predicci6n en tiempo real de caudales en cuencas
con registro de corta duraci6n
Estos dos aspectos tienen una gran relevancia para Veneshy
zuela donde ka escasez de registros de larga duraci6n impide el
usc de tecnicas ms sofisticadas de anlisis hidrol6gico
31 - Evaluaci6n de la funci6n de respuesta de una cuenca
El hidrograma de salida de una determinada cuenca fue reshy
presentado en la ecuaci6n (1-4) en el Captulo I como la convoshy
luci6n de la funci6n de respuesta de la cuenca con la precipitashy
ci6n sobre la misma Hay varios metodos como se mencionara
anteriormente para la identificaci6n del hidrograma unitario
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
Imiddot
- 17 shy
de una cuenca La identificaci6n de la funci6n de respuesta tamshy
bi~n puede realizarse usando el filtro de Kalman como se 10 deshy
tallarlti a continuaci6n
El caudal de salida de la cuenca en el intervalo Q(t) es
m
OCt) A b i(t-T) U(T)8 (3-1)=0
cuyas variables ya han sido definidas en el Capitulo I El
efecto de errores tanto en la estructura del modelo como en la
medici6n se puede representar incluyendo un t~rmino aleatoriO
0(t) en la ecuaci6n (3-1) y queda
m
o t) A E i(t-t) U(TT)8T + 0(t) (3-2) T=O
donde Set) es una variable aleatoria normalmente distribuida
con media cero y variancia IT(t) Esta variancia puede asumirse
constante a 10 largo del tiempo 0 que sea una funci6n del cau_
dal La ventaja del primero es que es flticil la estimaci6n de
IT(t) mientras que en el segundo caso tiene una hip6tesis
mltis realista de la variancia
Los terminos de middotla ecuaci6n (3 -1) pueden ser definidos
de la siguiente manera
~ (t) U(O) U(l) bullbullbullbullbullbull U(m) 13-3)
es un vector m- dimensional cuyos elementos son las ordenadas
- 18 shy
del HUI (Hidrograma Unitario Instantltineo) y que recibirlti el nomshy
bre de vector de estado de acuerdo a la terminologa del filshy
tro de Kalman
Definamos ahora el vector m-dimensional pound(t) de la siguiepound
te manera
pound(t) itt) i(t-l) i(t-2) bullbullbullbull i(t-m) (3-4)
Con estas definiciones la ecuaci6n (3-2) queda de la siguiepound
te forma
Q(t) = pound (t) ~ (t) + S(t) (3-5)
Bsta ecuaci6n tiene la misma forma funcional que la ecuaci6n
llamada ecuaci6n de medici6n en el filtro Para poder usar la
metodologia del filtro es necesario como se ha visto antes deshy
finir laecuaci6n de diferencias 0 ecuaci6n de estado que reshy
presenta la dinltimica del sistema En el caso del Hidrograma Un~
tario de una cuenca las ordenadas del mismo se suponen normalmenshy
te constantes en el sentido de que son invariantes en el tiempo
p~r 10 tanto la ecuaci6n de estado tiene la siguiente forma
~(t+1) ~(t) (3-6)
la cual es una versi6n simplificada de la ecuaci6n (2-1) y en
la cual se han hecho las siguientes hip6tesisl
~(t) I
g(t) Q
~(t) = Q
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 19 shy
Con estas dos ecuaciones se puede usar el procedimiento
propuesto p~r Kalman para ir actualizando el estimador de la
funci6n de respuesta de una cuenca (tlt) a medida que se vaya
recopilando nueva informaci6n
32 Predicci6n en tiempo real de caudales
La evaluaci6n dela funci6n de respuesta de una cuenca es
s6lo una etapa intermedia en el objetivo final que es la preshy
dicci6n de caudales en tiempo real
Dos procedimientos pueden suponerse en este momento Uno
es el usar la ultima funci6n de respuesta evaluada para realishy
zar predicciones de caudales futuros Este es el procedimiento
utilizado normalmente en hidrolog1a ver por ejemplo Natale y
Todini (1976) Este procedimiento sin embargo desaprovecharta
la estructura recursiva del filtro para poder actualizar la fUll
ci6n de respuesta de acuerdo a la bondad de las predicciones
pasadas
El caudal a la salida de la cuenca puede ser representado
como una funci6n de
i) caudales pasados en el mismo sitio
ii) caudales presentes y pasados en sitios aguas
arriba de la cuenca
iii) precipitaciones presentes y pasadas sobre la
cuenca
- 20 shy
y la forma general del modelo es similar a la vista anteriormenshy
te 0 sea
mno nk (3-7)a Q(t-l) + E E bkjPk(t-j) + aCt)Q(t) 1 i
k =1 j=li=1
donde
nUmero de t~rminos autoregresivosn o
nUmero de estaciones de precipitaci6n Y dem
caudales aguas arriba
nUmero de t~rminos en la estaci6n=nk
Esta ecuaci6n puede reducirse simplemente a la forma del
filtro de Kalman donde
(3-a)Q(t) pound (t) ~(t) + G(t)
y el vector pound (t) contiene los caudales y precipitaciones pasashy
das el vector ~(t) contiene los elementos de todas las funcioshy
nes de respuestas de todas las estaciones consideradas
La ecuaci6n que representa la dinimica del sistema se sushy
pone la misma que para el caso de la identificaci6n de la funshy
ci6n de respuesta 0 sea
(3-9)~(t+l) = ~(t)
Hay sin embargo una diferencia fundamental con el caso del
I
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 22 shy
- 21 shy
HU En~1 caso anterior la funci6n de respuesta representada por
el HUI se supone invariante en el tiempo y la ecuaci6n (3-9) es
te6ricamente correcta En el caso de predicci6n en tiempo real
ese no es el caso y la funci6n de respuesta cambiar~ por ejemshy
plo entre el invierno y el verano Hay rtos sin embargo espeshy
cialmente aquellos con cuencas de gran tamano como es el caso
del rto Orinoco en que las variaciones en las descargas no son
abruptas sino que ocurren en una forma suave y por 10 tanto las
variaciones en la funci6n de respuesta tambi~n ocurren suavemenshy
teo La justificaci6n de la ecuaci6n de estado es en este caso
operacional pues el estimador de ~(t) ir~ variando conttnuarnenshy
te tratando de adaptarse a las condiciones caffibiantes de la cue~
ca
Para este caso particular el filtro de Ralman da las siguie~
tes ecuaciones para la estimaci6n del estado del sistema (tlt)
y su covariancia (tltJ ElIas son
i) Actualizaci6n de la matriz de covariancia (tltJ
(tltJ = (tt-l) - (tlt-l) pound (t) pound (t) (tt-1) pound(t) +
+ IT (t) (t) (t t-1) (3-10)
(tt-l1 = (t-llt-l) (3-11)
con la condicion inicial
( -1) cov ~(O) ~(O)
Actualizacion del estimador del estado del sistema (tltl il)
erl2) (tlt-l) + g(t)r(t)
(t
donde
= Z(t)-pound(t) (tlt)innovacion del filtror (t) 1
(t)pound(t) JJ(tl shyganancia del filtro
con la condici6n inicial
(3-11) (-1) E 2pound(b)
Por 10 tanto para poder usar el filtro hay que realizar
hip6tesis sobre los siguientes par~metros
vector de medias Y matriz de covariancia deli)
estado inicial del sistema 0 sea ~(O) Y (O)
Variancia del termino aleatorio 0 sea net)ii)
iii) Estructura del modelo 0 sea n q m
Hay varios m~todos para realizar la determinacion de esshy
tos parametros bull Procedimientos basados en discrirninacion de moshy
delos basados en la teorta Bayesiana parecen dar los mejores reshy
sultados como se ver~ en una proxima secci6n
En este estudio se adopt6 despu~s de un exhaustivo an~li-
sis los siguientes valores
L
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 23 shy
iJ Valor esperado del estado inicial
E ( ~ (0) ] = Q
ii) Matriz de covariancia del estado inicial
f (0) lCI (3-14)
donde K es un escalar 10 suficientemente granshy
de que refleja la incertidumbre de ~os valores
supuestos para R (0)
iii) Variancia del t~rmino aleatorio e (t)
lI(t) cgtQ(t-l) (3-15)
o sea se hizo la variancia una funci6n del vashy
lor del caudal medido anterior De esta manera
se mantiene constante e1 coeficiente de variashy
ci6n de las descargas
iv) Estructura del modelo 0 sea no m nk En este
caso se hizo un an~lisis de las funciones de re~
pUesta definidas para cada estaci6n y cada per~
do de predicci6n para obtener los valores corresshy
pondientes de no m y nk mediante la calibraci6n
del modelo
Sin embargo este no es el caso en hidrologa donde Jiempre
es posible asumir conocimiento a priori sobre la respuesta del
1
- 24 shy
sistema Un procedimiento para obtener estimadores del estashy
do inicial del sistema ~(O) es la utilizaci6n del enfoque geoshy
morfo16gico propuesto p~r Rodrguez-Iturbe y Vald~s (1979) en
el cua1 se deriva e1 HUI de una cuenca utilizando caracterstishy
cas geomorfo16gicas de la misma
33 Algunas extensiones del modelo
Autocorrelaci6n en los residuos
La teora de identificaci6n de variables de estado propuesshy
ta p~r Kalman y Bucy est~ basada en varias hip6tesis Una de
elIas es que tanto el ruido en la ecuaci6n de estado como el
ruido en 1a de observaci6n es ruido gaussiano blanco El mode10
b~sico presentado en las ecuaciones (3-8) y (3-9) s610 considera
ruido en la ecuaci6n de observaci6n e1 cual est~ definido como
a(t) Q(t) - pound (t) ~(t) (3-16)
Si se considera que pound (t) es una medici6n puntual de un
proceso espacial en a1gunan ocasiones pound (1) sobreestimar~ la canshy
tidad tooal de lluvia sobre la cuenca y en otras la subestimar~
E1 error debido a la estimaci6n incorrecta del proceso espacia1
p~r medio de pound(t) se propagar~ en la estimaci6n de Q(t) duranshy
te todo e1 interva10 de tiempo que dure la influencia del composhy
nente de pound(t) en e1 sisteuroma 0 sea la memoria del sistema Si
la duraci6n de esta influencia es menor que el intervalo de tiemshy
po se puede afirmar que act y a(t+l) son errores indepenshy
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
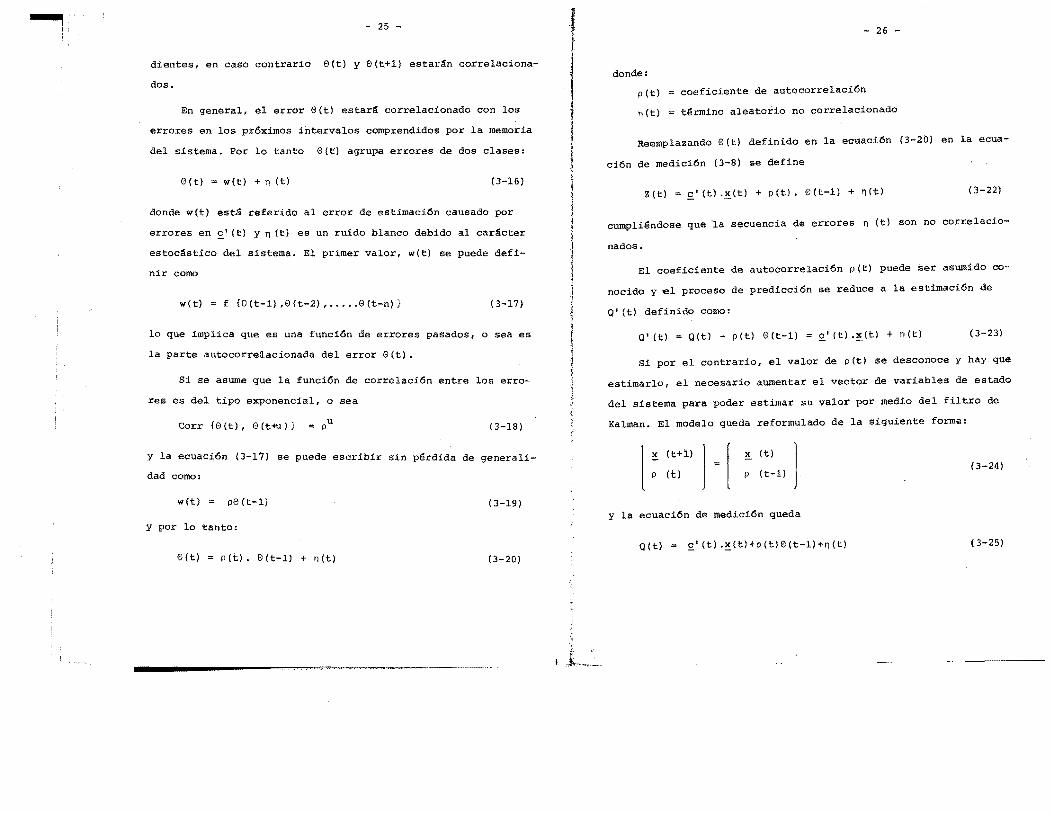
- 25 -
- 26 shy bull
j
dientes en caso contrario G(t) y G(t+l) estarn correlacionashy
dos
En general el error 0(t) estar correlacionado con los
errores en los pr6ximos intervalos comprendidos p~r la memoria
del sistema Por 10 tanto 0(t) agrupa errores de dos clases
o(t) w(t)+ n (t) (3-16)
donde wet) est referido al error de estimaci6n causado por
errores en pound (t) y n (t) es un ruido blanco debido al carcter
estocstico del sistema Elprimer valor wet) se puede defi shy
nir como
wet) f 0 (t-I) 0 (t-2) bullbullbullbull 0 (t-n) (3-17)
10 que implica que es una funci6n de errores pasados 0 sea es
la parte autocorreaacionada del error 0(t)
Si se asume que la funci6n de correlaci6n entre los erroshy
res es del tipo exponencial 0 sea
Corr f0 (t) G (t-+ll) pU (3-18)
y la ecuaci6n (3-17) se puede escribir sin perdida de generali shy
dad como
wet) p0 (t-I) (3-19)
y p~r 10 tanto
0(t) p(t) G(t-I) + net) (3-20)
donde
pet) coeficiente de autocorrelaci6n
termino aleatorio no correlacionadon(t)
Reemplazando G(t) definido en la ecuaci6n (3-20) en la ecuashy
ci6n de medici6n (3-8) se define
(3-22)ZIt) = pound (t) (t) + p(t) 0(t-l) + J(t)
cumpliendose que la secuencia de errores n (t) son no correlacioshy
nados
El coeficiente de autocorrelaci6n pet) puede ser asumido coshy
nocido y el proceso de predicci6n se reduce a la estimaci6n de
Q (t) definido como
(3-23)Q (t) Q(t) - pet) 0(t-1) = pound (t)(t) + net)
Si por el contrario el valor de pet) se desconoce y hay que
estimarlo el necesario aumentar el vector de variables de estado
del sistema para poder estimar su valor por medio del filtro de
Kalman El modelo queda reformulado de la siguiente forma
l (t)
(t+1) I (3-24)
p (t-1)p (t)
y la ecuaci6n de medici6n queda
Q(t) pound(t)(t)+p(t)0(t-l)+nt) ( 3-25)
------~~~~~~-~-----
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
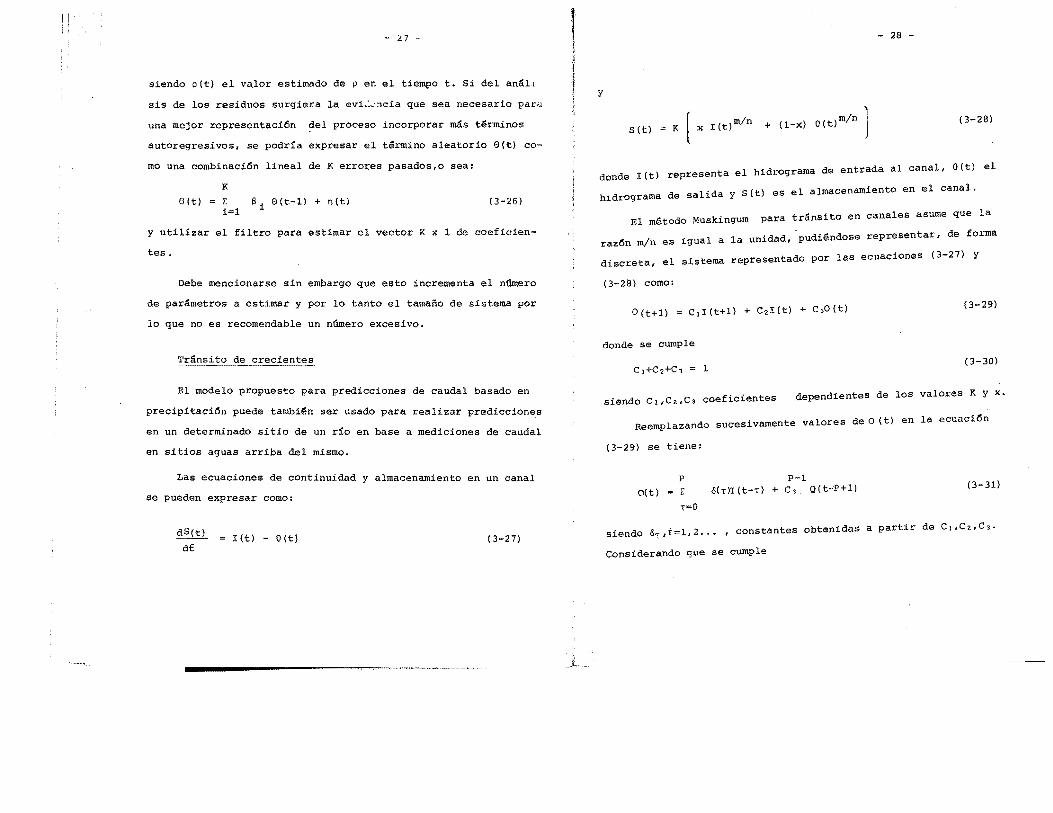
I - 28 shy- 27
siendo p (t) el va1or estimado de p en el tiempo t Si del an~Ll I y sis de los residuos surgiera la evi-lcia que sea necesario para J
(3-28)una mejor representaci6n del proceso incorporar m~s t~rminos K [ x l(t)mn + (I-x) O(t)mn 1S (t)
autoregresivos se podr1a expresar el termino aleatorio Set) coshy
mo una combinaci6n lineal de K errOres pasadoso sea donde l(t) representa el hidrograma de entrada al canal OCt) el K hidrograma de salida y set) es el almacenamiento en el canal
S(t) l ai S(t-l) + net) (3-26) i=1 El metodo Muskingurn para trampnsito en canales asurne que la
y utilizar el filtro para estimar el vector K x 1 de coeficienshy la unidad pudi~ndose representar de formaraz6n min es igual a tes representado por las ecuaciones (3-27) ydiscreta el sistema
Debe mencionarse sin embargo que esto incrementa el ndmero (3-28) como
de par~metros a estimar y por 10 tanto el tamano de sistema por (3-29)O(t+l) CIl(t+l) + C2l(t) + cO(t)
10 que no es recomendable un ndmero excesivo
donde se curnple
( 3-30)Cl+C2+Ca I
El modelo propuesto para predicciones de caudal basado en dependientes de los valores K Y xsiendo ClC2Ca coeficientes precipitaci6n puede tambi~n ser usado para realizar predicciones
Reemplazando sucesivamente valores de 0 (t) en la ecuaci6n en un determinado sitio de un r10 en base a mediciones de caudal
(3-29) se tiene en sitios aguas arriba del mismo
Las ecuaciones de continuidad y almacenamiento en un canal p p-I (3-31)o(T)I (t-T) + C Q(tmiddotmiddotP+l)oCt) r se pueden expresar como
T=O
siendo oTi~I2 bullbullbull constantes obtenidas a partir de CIC2CdS(t) l(t) - OCt) (3-27) dt Considerando que se cumple
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
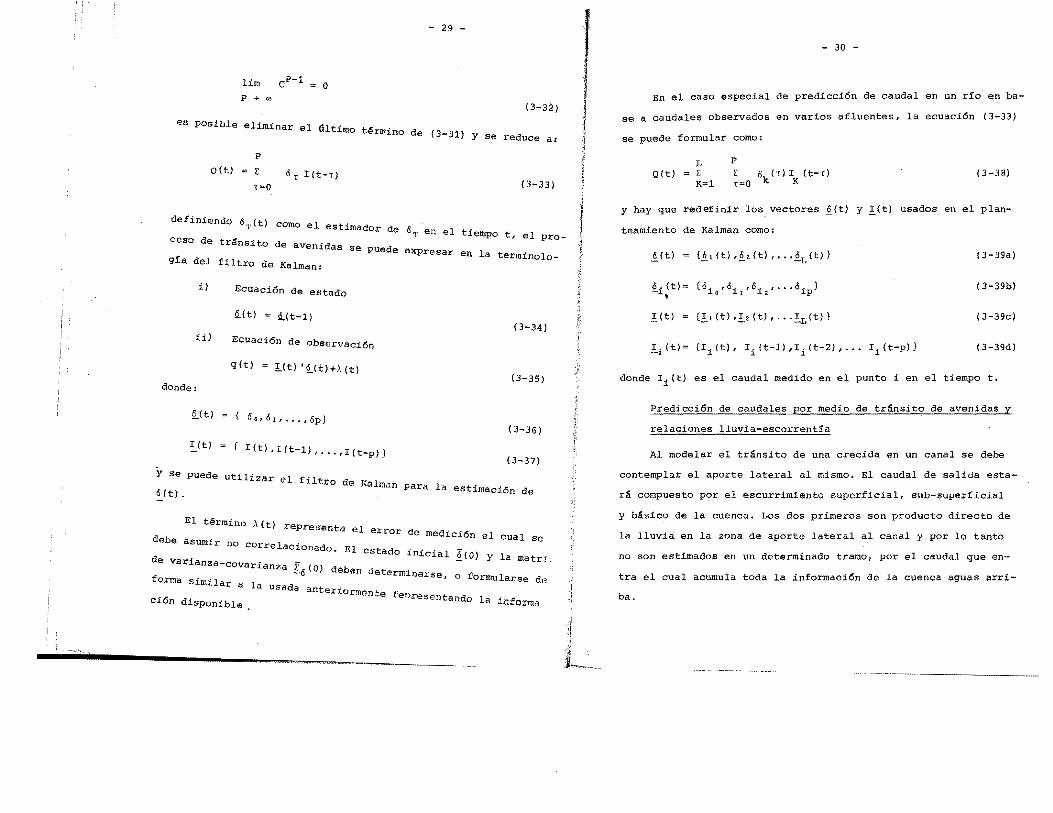
- 29 shy
cP- Ilim o P co
(3-32)
es posible eliminar el ultimo t~rmino de (3-31) y se reduce a
P
o (t) E lt5 T I (t-1) (3-33)10
definiendo QT(t) como el estimador de en el tiempo t el proshy
ceso de tranSito de avenidas se puede expresar en la terminolo_
gfa del filtro de Kalman
i) Ecuacion de estado
Q(t) S(t-I) (3-34)
if) Ecuaci6n de observaci6n
q(t) [(t)2(t)+A(t) (3-35)
donde
2( t) 0 0 6 1 bullbullbull op (3-36)
I(t) f I(t)I(t-I) bull I(t_p) (3-37)
Y se puede utilizar el filtro de Kalman para la estimaci6n de ( (t) bull
El termino A(t) representa el error de medici6n el cual se
debe asumir no correlacionado El estado inicial itO) y la matri
de varianza-covarianza Io(O) deben determinarse 0 formularse dIe
forma Similar a la usada anteriormente reoreSentando 1a inform~ ci6n disponible
-
- 30 shy
En el caso especial de prediccion de caudal en un rfo en bashy
se a caudales observados en varios afluentes la ecuacion (3-33)
se puede formular como
L P
Q(t) E K=I
E 1=0
a (T) I (t-T)k K
( 3-38)
y hay que redefinir los vectores pound(t) y Itt) usados en el planshy
teamiento de Kalman como
sect(t) sectl (t) sect (t) bullbull L (t) ( 3-39a)
0i(t)= oi oi oi bullbull oi - bull 0 I p
( 3-39b)
(t) = 1(t)2(t) bullbull (t) (3-39c)
I It) Ii (t) Ii (t-I) Ii t-2) bullbullbull Ii (t-p) (3-39d)-1
donde Ii(t) es el caudal medido en el punto i en el tiempo t
Predicci6n de caudales por medio de transito de avenidas y
relaciones lluvia-escorrentfa
Al modelar el transito de una crecida en un canal se debe
contemplar el aporte lateral al mismo El caudal de salida estashy
ra compuesto por el escurrimiento superficial sub-superficial
y basico de la cuenca Los dos primeros son producto directo de
la lluvia en la zona de aporte lateral al canal y por 10 tanto
no son estimados en un determinado tramo por el caudal que enshy
tra el cual acumula toda la informacion de la cuenca aguas arrishy
ba
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
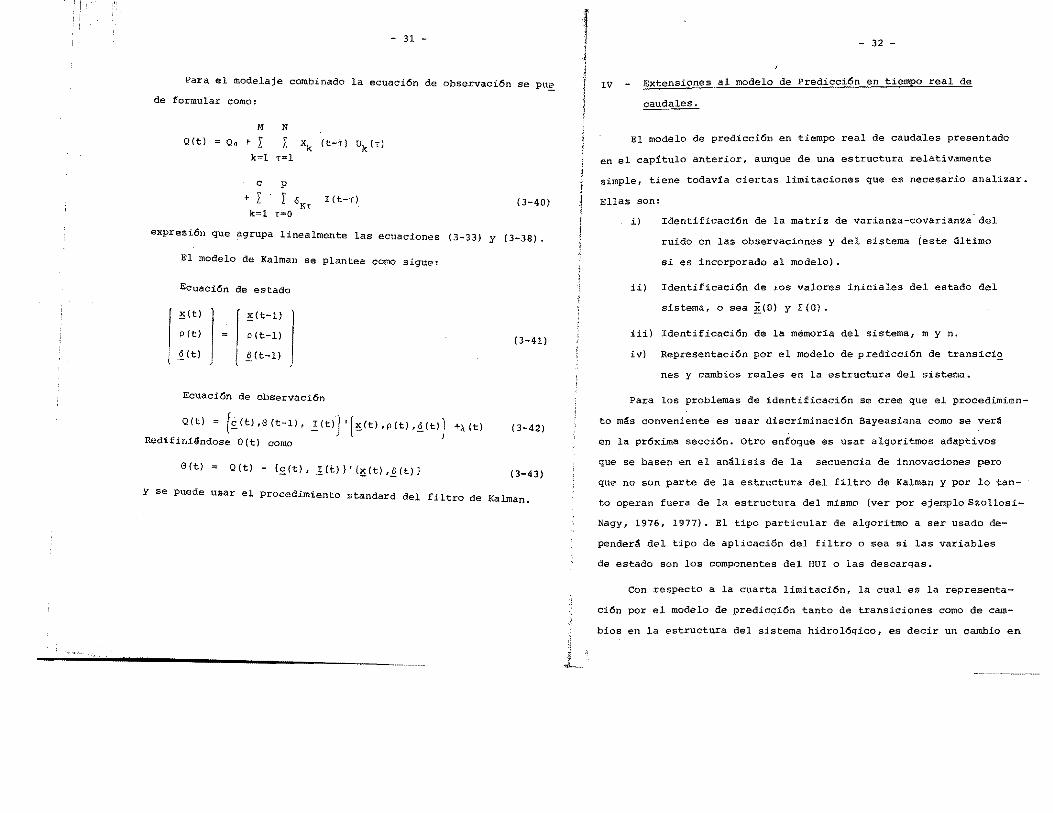
- 31 shy
Para e1 modelaje combinado la ecuaci6n de observaci6n se pu~
de formu1ar como
M N
Q(t) Qo + l ~ (t-T) Uk (T)Xk k=l T=l
c p
+ r l 0KT I(t-T) ( 3-40) k=l T=O
expresion que agrupa linealmente las ecuaciones (3-33) y (3-38)
El modelo de Kalman se plantea como sigue
Ecuaci6n de estado
~(t) J 1e(t-l)
Ipet) ~ p(t-l) J (3-41)
itt) i(t-l)
Ecuaci6n de observaci6n
Q(t) [pound(tlG(t-1)t I(t)J[~(t)P(t)i(traquo) +I(t) ( 3-42)
Redifiniendose G(t) como
G(t) Q(t) - fsctl I (t) ~(t) i (t) ( 3-43)
y se puede usar el procedimiento standard del filtro de Kalman
- 32 -
Extensiones al modelo de Predicci6n en tiempo real de
caudales
IV
El modelo de predicci6n en tiempo real de caudales presentado
en el captulo anterior aunque de una estructura relativamente
simple tiene todava ciertas limitaciones que es necesario analizar
ElIas son
i) Identificaci6n de la matriz de varianza-covarianzadel
ruido en las observaciones y del sistema ieste ultimo
si es incorporado al modelo)
ii) Identificaci6n de LOS valores iniciales del estado del
sistema 0 sea R(O) y E(O)
iii) Identificaci6n de la memoria del sistema m y n
iv) Representaci6n por el modelo de predicci6n de transici2
nes y cambios reales en la estructura del sistema
Para los problemas de identificaci6n se cree que el procedimienshy
to mas conveniente es usar discriminaci6n Bayeasiana como se ver~
en la pr6xima secci6n Otro enfoque es usar algoritmos adaptivos
que se basen en el analisis de la secuencia de innovaciones pero
que no son parte de la estructura del filtro de Kalman y por 10 tanshy
to operan fuera de la estructura del mismo (ver por ejemploSzo110sishy
Nagy 1976 1977) El tipo particular de algoritmo a ser usado deshy
pendera del tipo de aplicacion del filtro 0 sea si las variables
de estado son los componentes del HUI 0 las descargas
Con respecto a la cuarta limitaci6n la cual es la representashy
ci6n por el modelo de predicci6n tanto de transiciones como de camshy
bios en la estructura del sistema hidro16qico es decir un cambio en
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 33 shy
sus parampmettos Cambios en la estructura del sistema tienen que ser
incorporados en la ecuaci6n de estado del filtro trazando los proshy
blemas los problemas de identificaci6n de las caractersticas estashy
dsticas del mismo El problema de distinguir entre cambios transishy
torios y cambios estructurales del sistema en un esquema de m~ltiples
mOdelos se discutir~ en la secci6n 43 de este Capitulo
- 34 shy
41 - Selecci6n de la estructura del Filtro de Kalman usando
teora Bayesiana
En los modelos descriptos en el Capitulo anterior es necesario
asumir el valor de ciertos parampmetros que definen la estructura del
filtro de Kalman a utilizar Parampmetros tales como la memoria del
sistema y los estimadores a priori de las variables de estado y de
las matrices de varianza-covarianza La determinaci6n de estos par~meshy
tros no est~ totalmente definida dependiendo enmuchas casos de cri shy
terios empricos y subjetivos
A fin de poder comparar diferentes alternativas de valores para
estos parampmetros se formu16 un modele de discriminaci6n de modelos
hidro16gicos utilizando para ello teoria Bayesiana
Discriminaci6n Bayesiana se debe entender comomiddot el procedimiento
por medio del cual se asignan probabilidades a posteriori a cada moshy
delo de que sea el modelo verdadero del sistema La teora de discri shy
minaci6n Bayesiana ha sido usada en hidrologia para discriminar modeshy
los de extremos por Wood y Rodriguez-rturbe (1975) y para modelos de
regresi6n p~r Valdes y otros (1979 1980)
El proceso de discriminaci6n es recursivo siendo repetido despul
de que nueva observaci6n es disponib1e Cuando se han procesado un ali
n~ro de observaciones es de esperarse que el modelo cor recto tendramp
asignada la m~s alta probabilidad Para algunos casos se puede demosshy
trar te6ricamente que almoqelo correcto Ie seramp asignado la mamps alt
probabilidad
La probabilidad a posteriori de que un modelo sea el verdadero s
evalrta utilizando e1 teorema de Bayes de la siguiente forma
I l
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
35 shy
(4-1)P (Mimuestra) P(muestra)
donde
P (Mimuestra) probabilidad a posteriori de que el
modele Mi sea el modelo verdadero
p (Mi) Probabilidad a priori de que el moshy
delo Mi sea el correcto
P (muestraMi) Probabilidad de la muestra condicional
en el modelo i
P (muestra) constante de normalizaci6n definida
como
N (4-21r P(muestraMj) P~Mj)
j=1
Cuando una nueva informaci6n es disponible la probabilidad
a posteriori se convierte en la probabilidad a priori del modelo
Mi Los valores iniciales de la probabilidad a priori pueden
ser asumidos de acuerdo al juicio de quien utilize el modelo 0
en el caso de que no haya preferencia por ninguno de los modelos
puede asumirse como uniforme esto es
(4-3)p [~1i 1 iN
donde N es el nGmero de modelos que se est~n analizando El otro
termino en el lado derecho de la ecuaci6n (4-1 ) puede descomposhy
~~
- 36 shy
nerse en dos partes
P(muestraMi)=Pg(t) IMi=Pq(t) Ig(t-1)MiP~(t-l) IMi (4-4 )
donde
pg(t) IMi Probabilidad de la serie hist6rica
set) condicional en el modelo i
pq (t) IMil Probabilidad de observar el valor
~(t) condicional en el modelo i
La probabilidad a posteriori de que cada modelo sea el vershy
dadero puede obtenerse por medio de la relaci6n recurs iva resulshy
tarite de reemplazar la ecuaci6n (4-4) con la ecuaci6n (4-1)
Bajo la suposici6n de normalidadla distribuci6n condicional
de q(t) en el modelo i y en la serie g(t-I) es normal con momenshy
tos
Eq (t) Ig(t-1) Mi =1 (t) ~i (t-1) (l-5a)
vaiq (t) I g (t-I) Mil = =1 (t) Ii (t-l) pound(t)+0 (t) (4-5b)
donde
pound1 (t) vector que contiene caudales y preshy
cipitaciones pasadas consid~rado
de acuerdo a lamemoria del modelo i
estimador de las variables de estado~i(t)
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
1 1
- 37 shy
del modelo i en el tiempo t
l Ct) estimador de la matriz de varianshy-~
za-covarianza del modelo i
411 - Ejemplos del uso del modelo de discriminaci6n Bayesiana
para ident1ficar los parmetros del filtro
Se llevaron a cabo experimientos controlados para poder anashy
li~ar el comportamiento del modelo de discriminaci6n Bayesian~ en
la identificaci6n de los parametros del filtro Para ello se gen~
raron trazas sint~ticas p~r uno de los modelos y la serie generashy
da fue supuesta ser la muestra hist6rica Se utilizaron las predicshy
ciones de varios modelos de diferente estructura como entrada al
modelo de discriminaci6n para ver si el procedimiento verdaderashy
mente discrimina es decir si asigna la probabilidad a posterioshy
ri mas alta al modelo correcto Para medir el comportamiento de
cada modele se usaron los criterios num~ricos aceptados por la
Organizaci6n Meteoro16gica Mundial (WMO 1975) en su comparaci6n
de modelos conceptuales Tambien se elaboraron estos criter10s
num~ricos para las predicciones hechas por el modelo compuesto
Bayesiano es decir aquel en que las predicciones de cada modeshy
10 son ponderados p~r su probabilidad a posteriori Obviamente
en aplicaciones en el mundo real no se conocera cual es el modelo
correcto y el modelo a ser seleccionado debera ser aquel que meshy
jor se comporte ante los criterios de la WMO 0 criterios similashy
- 38 shy
res En tales circunstancias Y cuando el procedimiento de disshy
criminaci6n no senala claramente a un modelo determinado el uso
del modelo compuesto es el curs~ mas recomendable
Discriminaci6n de modelos con memorias alternativas
Para hacer inferencias acerca de la memoria del sistema en
traza hist6ri shymodelos de pron6stico hidro16gico se gener6 una
ca de caudales en una cuenca en particular con la siguiente esshy
tructura 5
(4-6)q(t)=~ + r P(t-T+1)SCT) + e(t) o
11
donde
q(t) caudal en el 1nstante t
coeficientes elegidos arbitrar1amentefl 10( o
precipitaci6n media ponderada sobre laf(t)
cuenca
E(t) termino aleatorio con media cero Y varianza
0 2 elegida arbitrariamente pound
Se analizaron modelos con tres longitudes de memoria lineal
diferentes El primero tiene 5 terminos de memoria lineal el seshy
gundo 10 Y el tercero 15 Todos los modelos tenian los mismos vashy
lores iniciales y la misma variancia del termino Set) La traza
hist6rica fue generada por el modelo 1 Y los resultados despues
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
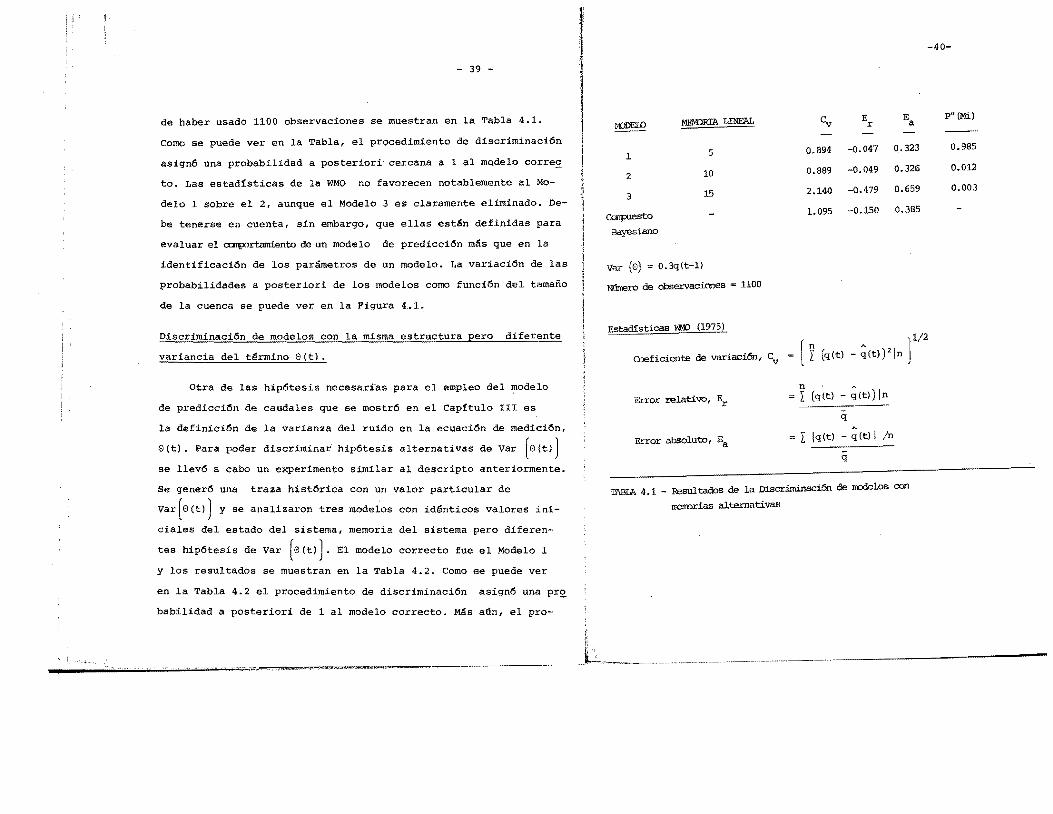
- 39 shy
de haber usado 1100 observaciones se muestran en la Tabla 41
Como se puede ver en la Tabla el procedimiento de discriminaci6n
asign6 una probabilidad a posteriori- cercana a 1 al m~delo correpound
to Las estadfsticas de la WMO no favorecen notablemente al Moshy
delo 1 sobre el 2 aunque el Modelo 3 es claramente eliminado Deshy
be tenerse en cuenta sin embargo que elIas estn definidas para
evaluar el CDlPlrtamiento de un modelo de predicci6n ms que en la
identificaci6n de los parametros de un modelo La variaci6n de las
probabilidades a posteriori de los modelos como funci6n del tamafio
de la cuenca se puede ver en la Figura 4bull 1
Discriminaci6n de modelos con la misma estructura pero diferente
variancia del termino G(t)
Otra de las hip6tesis necesarias para el empleo del modelo
de predicci6n de caudales que se mostr6 en el Capftulo Illes
la definici6n de la varianza del ruido en la ecuaci6n de medici6n
G(t) Para poder discriminar hip6tesis alternativas de Var [G(traquo)
se llev6 a cabo un experimento similar al descripto anteriormente
Se gener6 una traza hist6rica con un valor particular de
var(G(traquo) y se analizaron tres modelos con identicos valores ini shy
ciales del estado del sistema memoria del sistema perc diferenshy
tes hip6tesis de Var (G(traquo) El modelo correcto fue el Modelo 1
y los resultados se muestran en la Tabla 42 Como ae puede ver
en la Tabla 42 el procedimiento de discriminaci6n asign6 una pr2
babilidad a posteriori de 1 al modelo correcto Mas a6n el proshy
- ~ - _iiJflilOSiliJJfSiii _ iIgt-a w
-40shy
P (Mi)C E EMEJDRIA LINEIgtL av r ~
0894 -0047 0323 098551
0889 -0049 0326 0012102
00032140 -0479 0659153
1095 -0150 0385 canpuesto
Bayesiano
Var (e) ~ 03q(t-1)
NGnero de observaciones = 1100
Estad1sticas 1M) (1975) n ]12
Coeficienta de variaci6n C [ l (q(t) - ~(traquo)2Inv
nmiddot A r (q(t) - q(traquo) InEnor relative Er
q
Iq(t) - ~(t) I InError absoluto
q
TABIA 41 - Resultados de la Discriminaci6n de rrcdelos con
rrerrorias alternativas
----------_ -------- shy
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
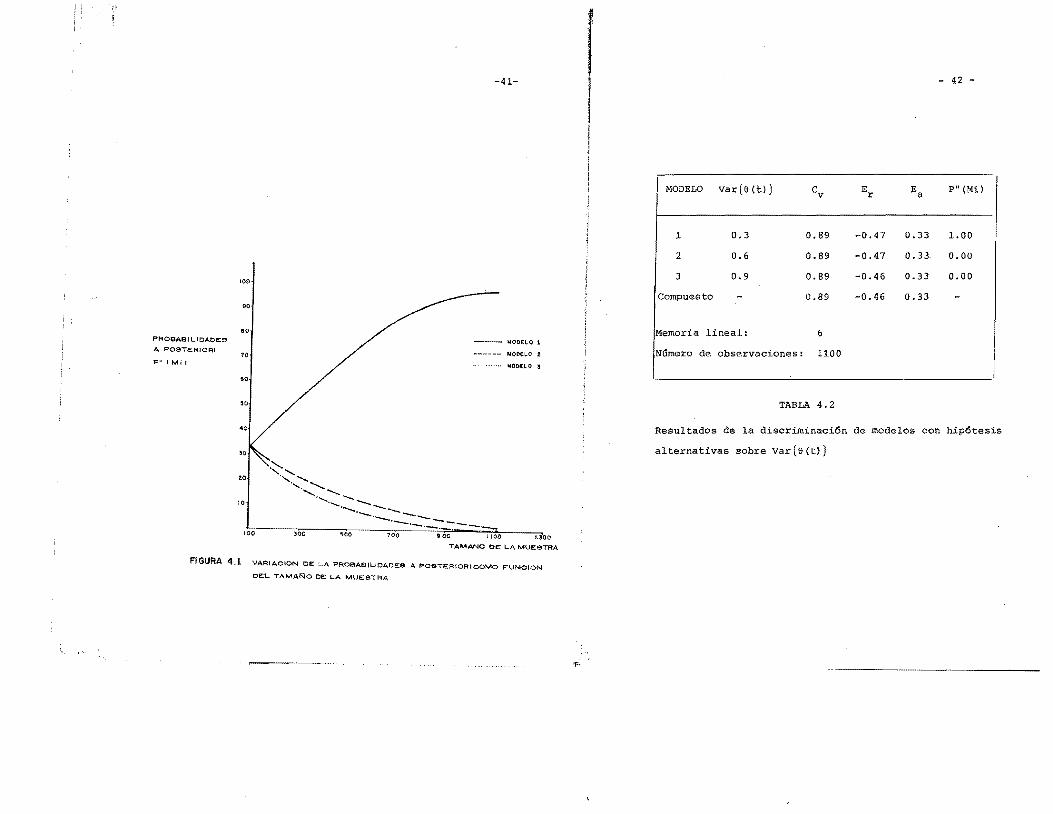
- 42 shy-41shy
00
PROBABI LIOADES
A POSTERIORI
F IMit
to
10
I MODELO var(e (traquo) Cv Ea P (Hi)
1 03 089 ~047 033 100
2 06 089 -047 033 000
3 09 089 -046 033 000
Compuesto 089 -046 033
Hemoria lineal 6 MODELO 1
OOlLO 2 Numero de observaciones 1100 MOOILO
TABLA 42
Resultados de la discriminaci6n de modelos con hip6tesis
alternativas sobre var(S(traquo)
- shy-
-----shy------~-=-----shy
90
80
70
60
00
-
00 lOO 000 700 9 CO I 00 1300
TAMANO OE LA MUE9TRA
FIGURA 41 VARIAOICN Olt LA PROSASILIOAOIt9 A P09TltRICRIOCMO FUNoCN
OEl TAMANO DE LA MUeSTRA
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
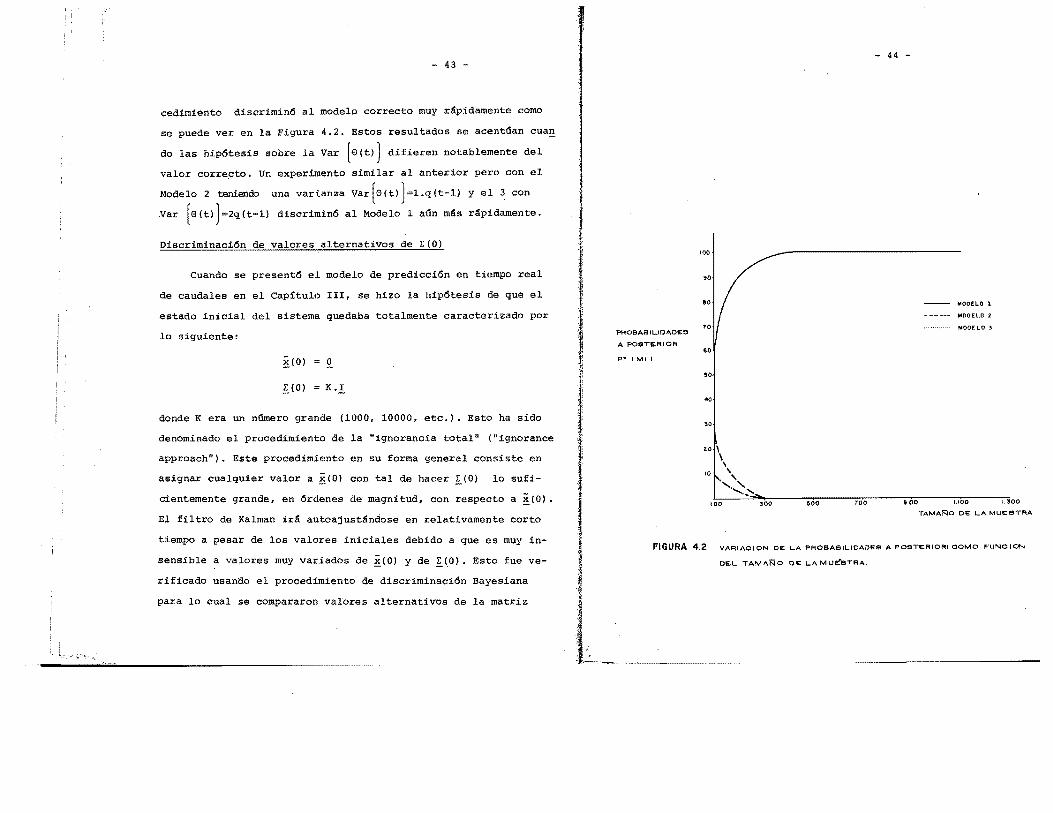
I
- 43
cedimiento discrimin6 al modele correcto muy rgpidamente como
se puede ver en la Figura 42 Estos resultados se acentuan cua~
do las hip6tesis sobre la Var [-e(traquo) difieren notablemente del
valor correcto Ur experimento similar al anterior pero con e1
Modelo 2 teniendo una varianza var[e(t) )=1q (t-1) y e1 3 con
Var lett) )=2q (t-1) discrimin6 al Modelo 1 aun mgs rgpidamente
Discriminaci6n de valores alternativos de E(O)
Cuando se present6 el modelo de predicci6n en tiempo real
de caudales en el Captulo III se hizo la hip6tesis de que el
estado inicial del sistema quedaba totalmente caracterizado por
10 siguiente
R(O) pound
~(O) K
donde K era un nUmero grande (1000 10000 etc) Esto ha side
denominado el procedimiento de la ignorancia total (ignorance
approach) Este procedimiento en su forma general consiste en
asignar cualquier valor a R(O) con tal de hacer ~(O) 10 sufi shy
cientemente grande en 6rdenes de- magnitud con respecto a R(O)
El filtro de Kalman irg autoajustgndose en relativamente corto
tiempo a pesar de los valores iniciales debido a que es muy inshy
sensible a valores muy variados de R(o) y de ~(O) Esto fue veshy
rificado usantlo el procedimiento de discriminaci6n Bayesiana
para 10 cual se compararon valores alternativos de la matriz
- 44 shy
00
MOOELD 1
MOOELO 2
10 MOOELO 3 PfotOBABILIOAOES
A POSTERIOR 60
pOI IIv1I I
0 40
30
201
ot shy shy700 00 1100 1300
TAMANO DE LA MUESTRA 100 lOO 00
FIGURA 42 VARIAOION CE LA PROSAS1L1CADES A POSTERIOR OOMO FuNOION
CEL TAMANO DE LA MUItSTRA_
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
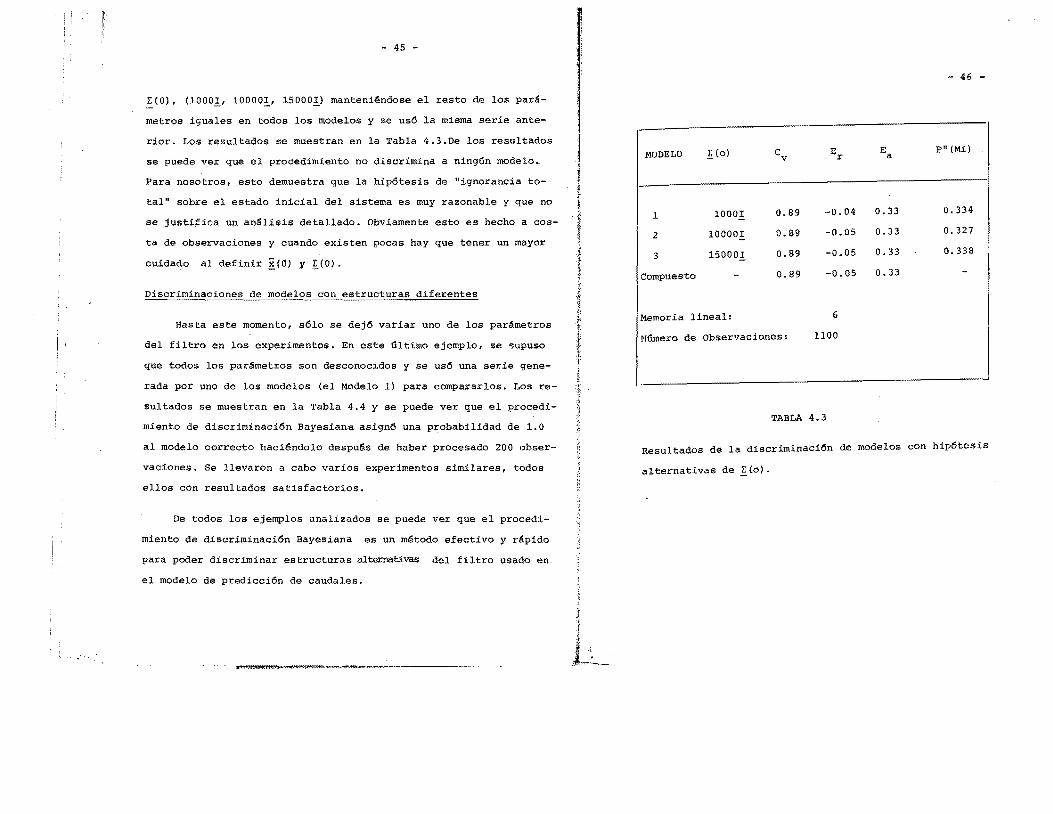
- 45 shy
E(O) (lOaD 10000 I5000) manteniendose el resto de los par~shy
metros iguales en todos los modelos y se uso la misma serie anteshy
rior Los resultados se muestran en la Tabla 43De los resultados
se puede ver que el procedimiento no discrimina a ningun modelo
Para nosotros esto demuestra que la hipotesis de ignorancia toshy
tal sobre el estado inicial del sistema es muy razonable y que no
se justifica un an~lisis detallado Obviamente esto es hecho a cosshy
ta de observaciones y cuando existen pocas hay que tener un mayor
cuidado al definir ~(O) y I(O) bull
Discriminaciones de modelos con estructuras diferentes
Hasta este momento solo se dejo variar uno de los par~metros
del filtro en los experimentos En este ultimo ejemplo se ~upuso
que todos los par~metros son desconocidos y se usc una serie geneshy
rada por uno de los modelos (el Modelo 1) para compararlos Los reshy
sultados se muestran en la Tabla 44 y se puede ver que el procedishy
miento de discriminacion Bayesiana asigno una probabilidad de 10
al modelo correcto haciendolo despues de haber procesado 200 obsershy
vaciones Se llevaron a cabo varios experimentos similares todos
ellos con resultados satisfactorios
De todos los ejemplos analizados se puede ver que el procedishy
miento de discriminacion Bayesiana es un metodo efectivo y r~pido
para poder discriminar estructuras alternativas del filtro usado en
el modelo de prediccion de caudales
- 46 shy
P (Mi) MODELO I (0) C v Er Ea
1
2
3
Compuesto
1000r
10000r
15000r
089
089
089
089
-004
-005
-005
-005
033
033
033
033
0334
0327
0338
Memoria lineal
NUmero de Observaciones
6
1100
TABLA 43
Resultados de la discriminacion de modelos con hip6tesis
alternativas de Ilo)
bull 4 bullbull
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
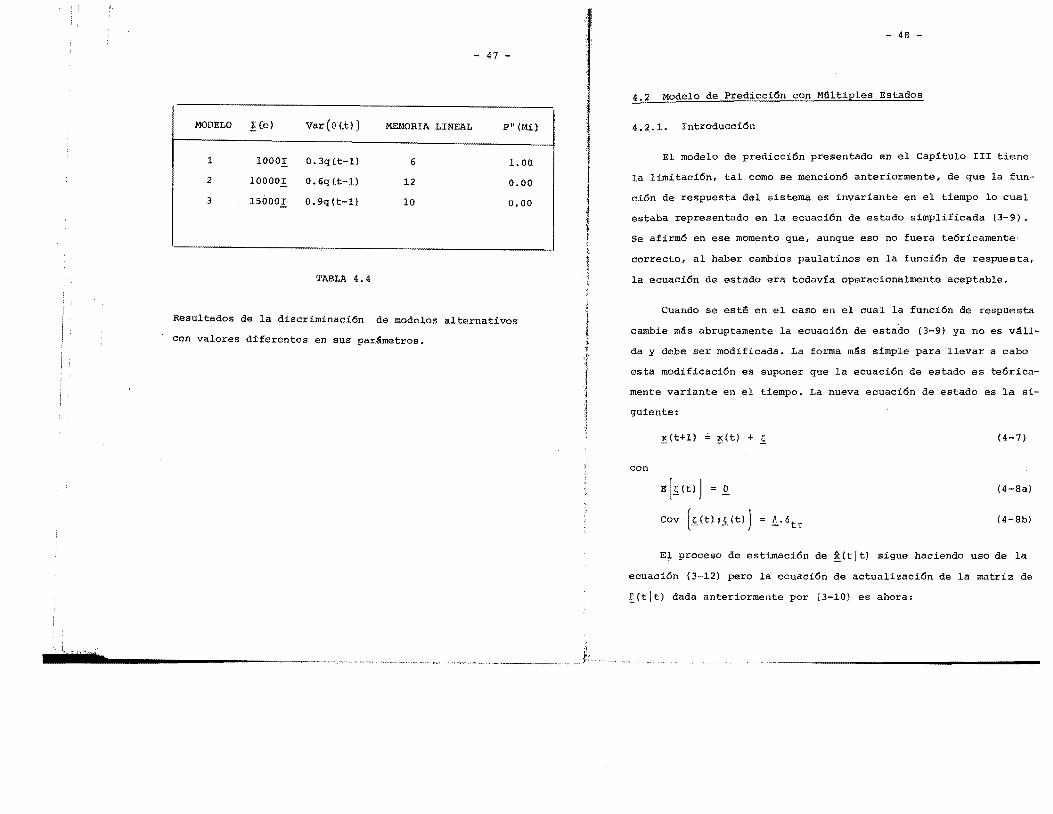
- 47 shy
MODELO 1 (0) Var (9(1raquo) MEMORIA LINEAL pOI (Mil
1 LOOOI 03q(t-1) 6 Loa 2 100001 O 6q (t-1) 12 000
3 150001 O 9q (t-1) 10 000
TABLA 44
Resultados de la discriminaci6n de mode10s a1ternativos
con va10res diferentes en sus parSmetros
l_~ gt_
48 shy
42 Modelo de Predicci6n con M61tiplesEstados
421 Introducci6n
El modelo de predicci6n presentado en el Capitulo III tiene
la limitaci6n tal como se mencion6 anteriormente de que la funshy
I ci6n de respuesta del sistema es invariante en el tiempo 10 cual
estaba representado en 1a ecuaci6n de estado simplificada (3-9)
Se afirm6 en ese momenta que aunque eso no fuera te6ricamenteshy
correcto al haber cambios paulatinos en la funci6n de respuestaI la ecuaci6n de estado era todavia operacionalmente aceptable I j Cuando se este en el caso en e1 cual la funci6n de respuestal I cambie mSs abruptamente la ecuaci6n de estado (3-9) ya no es vSli shy
l
da y debe ser modificada La forma mSs simple para llevar a cabo
1 esta modificaci6n es suponer que la ecuaci6n de estado es te6ricashy
mente variante en el tiempo La nueva ecuaci6n de estado es la si shy1
guiente
~(t+1) ~(t) + 5 (4-7)
con
E[5(tl J = 0 (4-8a)
Cov rl (tl5 (t) J ~OtT (4-8b)
El proceso de esHmaci6n de ~(tlt) sigue haciendo uso de la
ecuaci6n (3-12) pero la ecuaci6n de actualizaci6n de la matriz de
1(tlt) dada anteriormente por (3-10) es ahora
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
II i i
- 49 shy
~(tltl = ~(tlt-1) +1 -(~(tlt-ll pound (t)
pound (t) ~(tlt-1)pound(t)+rr(t)
(~(tlt-l) (4-9)
No se cree desde un punto de vista hidro16gico que el represhy
sentar e1 sistema p~r la nueva ecuaci6n de estado dada p~r (4-7) sea
un m~todo conveniente El representar el sistema de esa manera no
resuelve el problema b~sico que es hacer que el modelo sea capaz
de distinguir entre una transici6n debido a un repentino incremento
en la precipitaci6n y un cambio poundeal en la funci6n de respuesta La
dificultad existe en que aparentemente hay que escoger entre un
sistema sensible el cual responder~ r~pidamente a carnbios reales si
ocurren pero que tambi~n responder~ a transiciones y sistemas poco
o nada sensibles que no reaccionaran a errores en medici6n de los
datos de entrada y a transiciones pero tampoco 10 har~n cuando
ocurran cambios en la estructura del sistema Puesto que variacioshy
nes absolutas en la entrada son ~s comunes que cambios reales en
la respuesta del sistema muy frecuentemente se opta p~r sistemas
insensibles dando lugar como 10 senalan Harrison y Stevens (1971)
a que cuando ocurran cambios en la estructura el modelo no los
senale y se mueva lentamente ~acia su nivel dando por resultado
que los pron6sticos realizados durante ese perodo difieran notashy
blemente de los valores observados
- 50 shy
En principio se pueden observar tres posibles estados en los
cua1es se puede encontrar el sistema estable de transici6n estrupound
tural y transiente estoc~stico En el estado estable la funci6n
de respuesta no tiene variaci6n el estado de transici6n estructural
i como su nombre 10 indica implica cambios en la estructura del sist~
rna los cuales se traducen en cambios en la funci6n de respuesta yI
e1 transiente estoc~stico esta relacionado con bruscas fluctuaciones
debidas al caracter probabilstico intrnseco del sistema Lo ante-
I 1 rior significa que si se asume una variabilidad constante en el tiemshy
po el modelo no tiene una senal clara de los carnbios que estan
ocurriendo cuando alteraciones bruscas se hacen presentes en el sisshy
tema la consecuencia directa es la lenta reacci6n en el cambio de
Ila funci6n de re~puesta en el modelo 10 que implicagrandes diferenshy
cias entre la serie real y la serie de predicciones
1 En esta secci6n se presentar~ 1a teora necesaria para que modeshy
los basados en el filtro de Kalman identifiquen los estados de transishyI t ci6n y cambie la estructura de la funci6n de transferencia a fin de i 1 que la respuesta refleje e1 estado m~s probable del sistema A nivel I metodo16gico esto implicaf ~
i) la matriz de varianza-covarianza de los errores es funci6n
de los estados en que potencialmente puede estar el sistema
ii) mediante analisis discriminante Bayesiano como se viera en ~
la secci6n anterior se escoge el nuevo estado del Sistema esto es
se determina la probabilidad a posteriori de que cada posible estado
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
422
Ii ill
- 51 shy
sea el verdadero y se realiza la predicci6n en base a la integrashy
ci6n sobre todos los posibles estados
ES posible probar como en efecto se hace que el modelo con
mtlltiples estados produce erroresde predicci6n con menor varianshy
za que los generados p~r el modelo de predicci6n presentado en el Ii Capftulo III
Modelo de predicci6n de un estado f
ifi j El modelo de predicci6n de un estado esmiddotmuy similar al preshy
sentado en el Capftulo III El modelo tiene la siguiente estrucshy Jji
tura II
- Ecuaci6n de Estado
l It) lIt-i) + pound(t-1) + pound(t) II 14-10)
poundIt) = poundIt-l) + It) 14-11)
donde
poundIt) es el cambio es las ordenadas de la funci6n de
respuesta entre el tiempo t y el t-1
~(t) es el vector de ruido del sistema
lIt) es la funci6n de respuesta del sistema en el tiempo t
fIt) es el vector de ruido correspondiente a pound(t) en la
ecuaci6n de estado
-----~--~bull- -bullbull-~-- bull ------~bull --_shy
- 52 shy
_ Ecuaci6n de Observaci6n
q (t) = (t) let) + E(t) 14-12 )
El estado del sistema como en el caso anterior sigue una
distribuci6n normal con momentos
E (l (t) pound (traquo) = l It) (traquo) (4-13)
E (Il (t) - Itraquo (l(t) - (traquo) -Ldt) 14-14a)
E (Il It) - (traquo 1poundlt) - It))1 2 It) 14-14b)
E (pound It) - It) )(poundIt) - It))) alt) 14-14c)
siendo representado en adelante este conjunto demomentos como
sectl It) ( It) It) I It) L2(t) I (t) ) (4-15)
Los t~rminos de ruido pound(t) (t)Elt) se asumen multinormalshy
mente distribuidos con media cero y matrices de varianza-covarianshy
za Qdt) Qa(t) y Rlt) respectivamente
Usando la notaci6n propia del filtro de Kalman se tienen esshy
t~madores ~ de sectl de la forma
~(tdt2) (ltdt2) (tdt2) r(tdt) Idtlt2) Ldt I t2l
(4-16)
donde ~(tlt2) est~ definido como el conjunto de momentos para la
distribuci6n de las variables de estado en el tiempo t dado que
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
I ~
- 53 shy
se tiene informaci6n disponible hasta el tiempo t Para el caso
de tl=t Y t2=t-l los estimadores 8(tlt-l) obtenidos en base a
la estructura dinsectmica del sistema para el tiempo t y estsectn defi
nidos como
(tlt-l) (t-lt-l) + ~(t-llt-l) (4-l7a)
~(tlt-l) = ~(t-llt-l) ( 4-l7b)
II(tt-l)= II(t-llt-l) + I2(t-llt-l) + I~(t-llt-l)
+ Ialtt-llt-l) + Qdt) (4-17c)
I21tl t-l) I2(t-llt-l) + [(t-llt-l) ( 4-l7d)
I(tlt-l) I3(t-llt-l) + Q2(t-lt-l) (4-17e)
Los estimadores (tit) obtenidos en base a la combinaci6n
Bayesiana de (tit-I) y la informaci6n de la medici6n en el tiempo
t representan la informaci6n a posteriori del sistema y estsectn de
finidos como
(tlt) (t It-I KI(t)Idtlt)pound(t) (4-lBa)
~(tlt) = ~(tlt-l) Kl (t) I2 (tit)pound (t) (4-1Bb)
II(tlt)= II(tlt-l) - K2 (t)II(tlt-l)pound(t)pound(t)Il(tt-l) (4-1Bc)
I21tt)= I21tlt-l) - K21t)Idtlt-l)pound(t)pound (t)I21tlt-l) (4-1Bd)
I(tt)= Ialttlt-l) - K21t)I21tlt-l)pound(t)pound (t)21tlt-l) (4-1Be)
L
- 54 shy
~
iii
donde K I (t) Y K2 (t) estan definidos como
middoti KI (t) (q(t) - pound(t)(tlt-l)) R(t) (4-19a)
~li -I
Ji
-of
K21t) (pound (t)Idtlt-l)pound(t) + R(t)) (4-l9b)
La obtenci6n de 8(tlt) a partir de ~(t-llt-l) gl(t) g2(t)R(t)
y q(t) se sintetiza como
~ (t It) f3 ~ (t-ll t-l) gl (t) g2 (t) R(t) q (t) (4-20 ) ~
donde f3 es el operador que representa la combinaci6n Bayesiana de la
informaci6n tal como se ha propuesto en el conjunto de ecuaciones
(4-17) (4-18) y (4-19)
423 Definici6n Te6rica del Modelo de Predicci6n con Multiples
Estados
A continuaci6n se presenta el desarrollo para el caso en que se
considera que el sistema puede estar en uno de varios estados posishy
bles los cuales estan caracterizados por las matrices de varianzashy
covarianza de los diferentes terminos del ruido
Sea N el nGmero de estados posibles en los cuales el sistema
puede estar y Pj(t) la probabilidad a priori de que el sistema este
en el estado en el tiempo t Los terminos del ruido se asumen
gaussianos pero ahora con_matrices de varianza-covarianza dependienshy
tes del estado del sistema esta dependencia se indicarsect por medio
de Un sublndice adicional quedando el estado del sistema definido
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
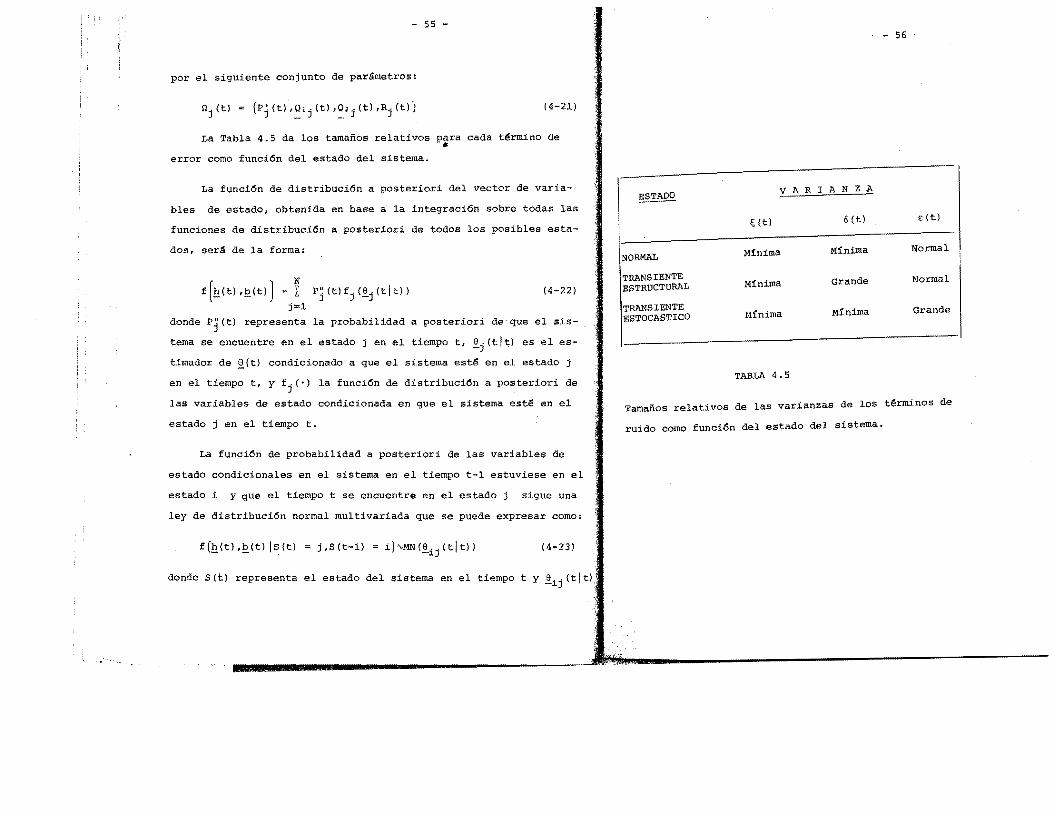
- 55 shy
por el siguiente conjunto de par~etros
Ilj (t) (t) Qlj (t) Q2j (t) Rj (traquo) (4-21)
La Tabla 45 da los tamafios relativos pra cada t~rmino de
error como funci6n del estado del sistema
La funci6n de distribuci6n a posteriori del vector de variashy
bles de estado obtenida en base a 1a integraci6n sobre todas las
funciones de distribuci6n a posteriori de todos los posibles estashy
dos sera de la forma
f(Q(t)pound(traquo) ~yen P (t)f) (8 (titraquo (4-22)J -J
j=l
donde (t) representa la probabilidad a posteriori de que el sisshy
tema se encuentre en el estado j en el tiempa t (tit) es el esshy
timador de ~(t) candicionado a que el sistema este en el estado j
en el tiempo t y f j
(middot) la funci6n de distribuci6n a posteriori de
las variables de estado condicionada en que el sistema este en el
estado j en el tiempo t
La funci6n de probabilidad a posteriori de las variables de
estado condicionales en el sistema en el tiempo t-l estuviese en el
estado i Y que el tiempo t se encuentre en el estado j sigue una
ley de distribuci6n normal multivariada que se puede expresar como
f(Q(t)pound(t) IS(t) = jS(t-i) = i)MN(~ij(tltraquo (4-23)
donde set) representa el estado del sistema en el tiempo t y elt~(tl
- 56
ESTADO VARIANZA
~ (t) Il (t) get)
NORMAL
TRANSIENTE ESTRUCTURAL
TRANSIENTE ESTOCASTICO
Mnima
Mnima
Mnima
Mnima
Grande
Minima
Normal
Normal
Grande
TABLA 45
Tamanos relativos de las varianzas de los terminos de
ruido como funci6n del estado del sistema
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 57 shy
es el conjunto de par~etros que la definen
Los estimadores e (tit) son obtenidos a partir de la combinashy-1)
ci6n Bayesiana de la informaci6n del estado i en el tiempo t-l y
del estado j en el tiempo t Esta cOmbinaci6n de informaci6n tiene
la misma forma que la definida en ela ecuaci6n (4-20) y para este
caso est~ determinada como
~ij (tit) =a(~i (t-llt-1) 9j (t) 92j (t) R j (t) q(traquo) (4-24)
La funci6n de distribuci6n incondicional del vector de variashy
bles de estado definida en base a una suma ponderada de las funcioshy
nes de distribuci6n para todas las posibles transiciones es equivashy
lente a la definida en la ecuaci6n (4-22)
N N f[(t) pound(t)] L L Pij (t)MN(~ij (titraquo (4-25)
j=1 j=1
donde Pij(t) es la probabilidad aposteriori de que una transici6n
del estado i al estado j haya ocurrido una vez que se ha procesado
la informaci6n q(t)
PI (t) = PreSet) jS(t-1) ilq(t)q(t-1) bullbullbull ) (4-26)-1)
En base al teorema de Bayes el valor de Pij(t) est~ definido
como
- 58 shy
pdq(t) IS(t) = jS(t-l) = iq(t-1)q(t-2) bullbull Pij (t) c
PrS(t) = jIS(t-1) = iq(t-l)q(t-2) bullbullbull
PrS (t-I) ilq(t-l) q(t-2) bullbullbull
iq(t-1) q(t-2) bullbull L q(t) IS(t) jS(t-l)
P j (t) bull Pi (t-I)
c
C 1
exp q(t) -c (t)
-(tit-I)
I bull IT j (t) Ai (t
2nVij 2Vij
(4-27)
donde L() representa la funci6n de verisimilitud Y Vij est~ defin
como
(4-2S)c(tlL (t t-1)c(t) + R(t)Vij - 1) - )
y C representa una constante de proporcionalidad
Los estimadores ~j(tlt) de la distribuci6n del vector de varj
bles de estado independiente del estado en el tiempo t-l se obtier
en base a una combinaci6n lineal ponderada de todas las posibles
transiciones del estado i al estado j
N (4-29(t) (t)L i=1
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 59 shy
H(tll)=L N
Pimiddot (t) H1 (t It) P~ (t) (4-30a)-J J - J J
11
N j(tlt) L Pij(t)1j(t l l)Pj(t) (4-30b)
i=1
N P (t) ] [ lj(tI1) L iL- [Llj(t1t)+[(t1t) (tit) j(tlt) (tit)
P~(t) _ 1 J i=1 J
(4-30c)
t2j (tit) yen [l2 (tlt)+[Hj (tlt)-Hi (tit)] [Bj (tlt)-B (tlP(t) c- 1 J - -J - -1J 11 j
(4-30d)
19j(tlt) = yen [l3ij(tlt)+ (t1t)-ij (tit)] (tlt)=Bij(t 11 Pj(t)
(4-30e)
El procedimiento expresado en lasf6rmulas (4-29) y (4-30) pre
va la informaci6n m~s relevante de las variables de estado y garantiza
que la distribuci6n a posteriori tenga la misma forma estructural que
la 1nformaci6n a priori 10 que permite el procesamiento secuencial de
la informaci6n a medida que ~sta se produce
4 3 APLICACIONES DEL MODELO DE MULTIPLES ESTADOS
La validaci6n del modelo de predicci6n propuesto fue realizada en
base a predicc10nes con un dfa de adelanto hechas en la cuenca del rfo
i I
- 60 -
Caronf con un ~rea de escurr1miento de aproximadamente 98000 Km
Se realizaron predicciones diarias en los sitios de San Pedro y
Arekuna durante el perfodo 1968-1971
Dada la corta longitud de la serie estudiada no se consider6
conveniente utilizar una parte de ella para prop6sitos de calibrashy
ci6n de par~metros de modelo y la parte restante para verificaci6n
del mismo Se pas6 directamente a la fase de verificaci6n con la
serie completa y no se cree se introduzcan mayores problemas dadas
las caracterfsticas del filtro de Kalman
El estado inicial del sistema se defini6 segan el estado de
absoluta ignoranci~ que se describiera en la Secci6n 32 es deshy
eir
(4-31)(olo) pound(010) = Q
(4-32a)IdOIO) l(olo) KI
(4-32b)IdOla) Q
Por esta raz6n se debe considerar un perfodo de estabilizaci6n
del proceso de filtrado de informaci6n de tal forma de no incluirshy
10 en las estadfsticas num~ricas evitando sesgos en las mismas las
cuales se calculan a partir del momento en que se considera que el
modelo ha alcanzado un estado estable para prop6sitos de predicci6n
Bste perfodo fue un ano en este ejemplo
Predicci6n en San Pedro
La predicci6n en San Pedro fue realizada usando el modelo de p
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
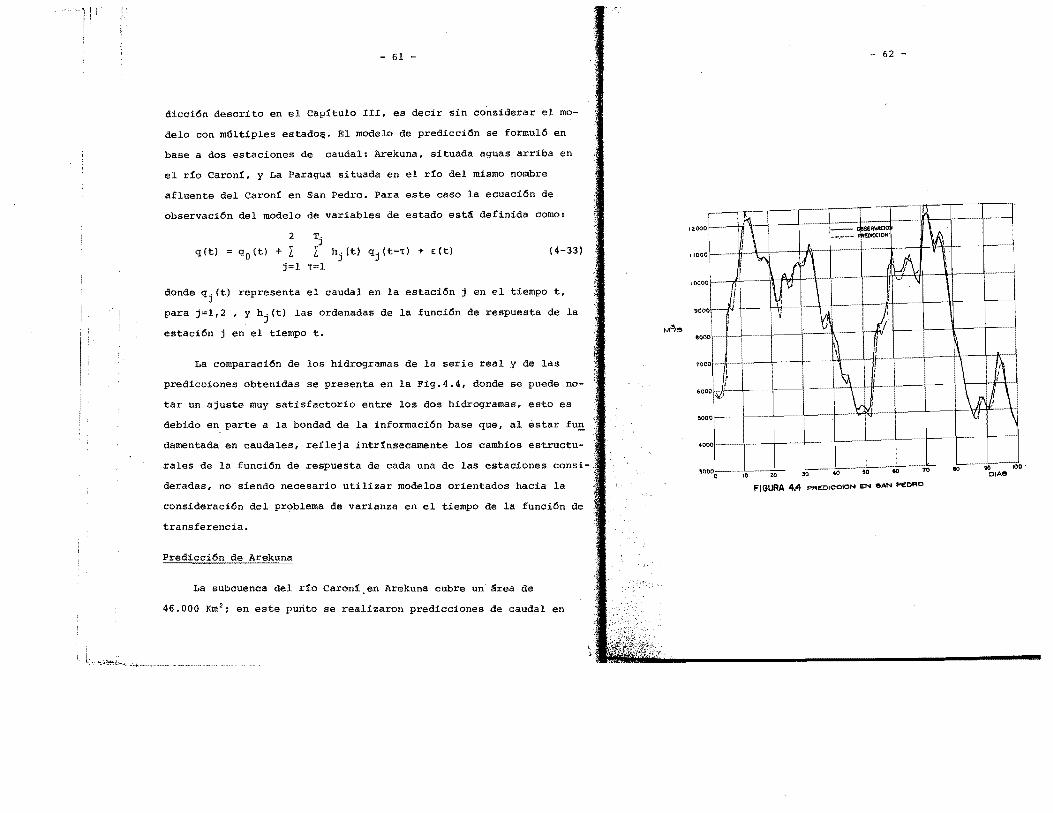
I
- 61 shy
dicci6n descrito en el Captulo III es decir sin considerar el moshy
delo con mGltiples estado~ El modelo de predicci6n se formu16 en
base ados estaciones de caudal Arekuna situada aguas arriba en
el ro caron y La Paragua situada en el ro del mismo nombre
afluente del caron en San Pedro Para este caso la ecuaci6n de
observaci6n del modelo de variables de estado esta definida como
2 ~ q(tl qO(t) + l l hjlt) qj(t-r) + ~It) 14-33)
j=l r=l
donde qjet) representa el caudal en la estaci6n j en el tiempo t
para j=12
estaci6n j
y hjltl las ordenadas de
en el tiempo t
la funci6n de respuesta de la
La comparaci6n de
predicciones obtenidas
los hidrograma
se presenta en
s de la serie real y de las
la Fig44 donde se puede noshy
tar un ajuste muy satisfactorio entre los dos hidrogramas esto es
debido en parte a la bondad de la informaci6n base que al estar fu~
damentada en caudales refleja intrnsecamente los cambios estructushy
rales de la funci6n de respuesta de cada una de las estaciones consishy
deradas no siendo necesario utilizar modelos orientados hacia la
consideraci6n del problema de varianza en el tiempo de la funci6n de
transferencia
La subcuenca del rio caronen Arekuna cubre un area de
46000 Km 2 en este purito se realizaron predicciones de caudal en
- 62 shy
M~
12000 ~ fshy
-~ I~ -- shy
1 I == ~~~~~ ~I
~ I--shy
~ ~llf1 T l- I--- shy
I UI I
] IVv + __
1- J I I
1 I II I 1
11000
10000
900
oimiddotmiddotmiddotmiddot i-f--shy
~ fl 10ri
I ~ f- t-
if ~ I AI I
I~I J 1J 01- f------1-shy I Xl
000
100
600
00
-shy0 a
-_~____ L-shy L_
to iOC 30 10 20 30 40 to 0lA8
FIGURA 44 PAEOICOION EN 8A1 PEORO
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
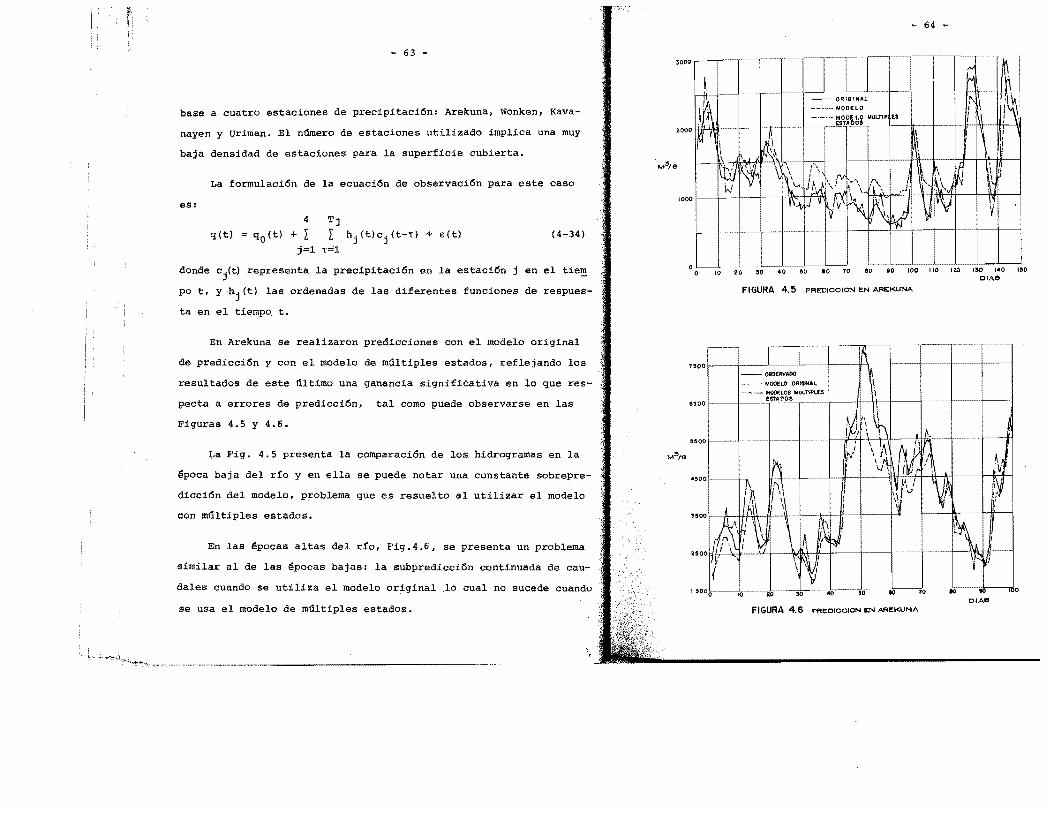
ZOGQr- I ~
Ii - 63 shy
base a cuatro estaciones de precipitaci6n Arekuna Wonken Kavashy
nayen y Uriman pound1 n~ero de estaciones utilizado implica una muy
baja densidad de estaciones para la superficie cubierta
La formulaci6n de la ecuaci6n de observaci6n para este caso
es
qt) qOt)
4
+ L Tj
L hjtlcjt-T) + etl (4-34)
j=l p=l
donde Cj~ representa la precipitaci6n en la estaci6n j en el tie~
po t y hjt) las ordenadas de las diferentes funciones de respuesshy
ta en el tiempo t
En Arekuna se realizaron predicciones con el modelo original
de predicci6n y con el modelo de multiples estados reflejando los
resultados de este ultimo una ganancia significativa en 10 que resshy
pecta a errores de predicci6n tal como puede observarse en las
Figuras 45 Y 46
La Fig 45 presenta la comparaci6n de los hidrogramas en la
epoca baja del ro y en ella se puede notar una constante sobrepreshy
dicci6n del modelo problema que es resuelto al utilizar el modelo
con multiples estados
En las epocas altas del ro Fig46 se presenta un problema
similar al de las epocas bajas la subpredicci6n continuada de caushy
dales cuando se utiliza el modelo original 10 cual no sucede cuando
se usa el modelo de multiples estados
-M3S
~ 64 ~
o 10 20 30 40 eo to TO 80 ill 0 100 110 120 ISO lt40 ISOo OIAe
FIGURA 415 PREOIOOION EN AREKUNA
7500 I
00 I
i 1
M~e
~~~~~~~~
-- - -- MOOpoundLO ORIGWAL ~- - MOOElClS MULTiPLESI poundAOOS
001~~~~~4 ~~m ~ AIpound
ll)o
CIA
FIGURA 46 PREOIOOION EN AREKUNA
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
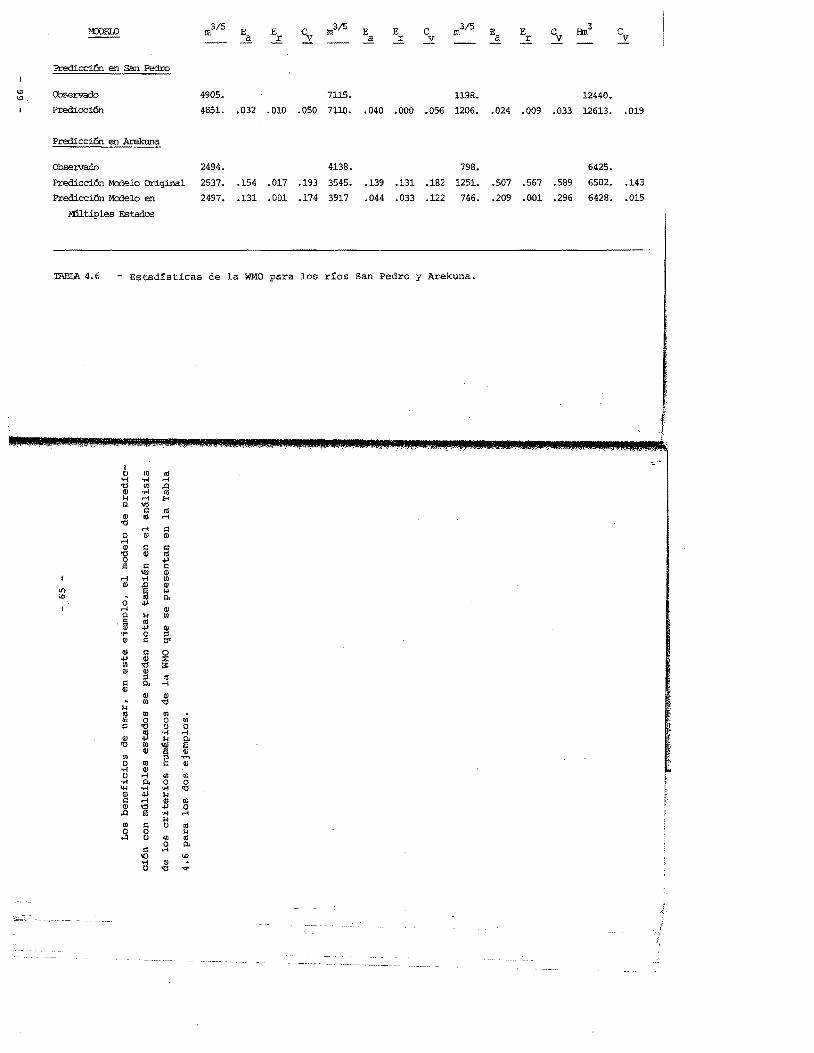
3MJDEW m35 m35 E C m35 C limEa Er Ea v2 2
ID ID Cbservaclo
Predicc10n
4905
4851 032 bull010 050
7115
7110 bull 040 000 056
1198
1206 024 009 033
12440
12613 019
Prediccian en Arekuna
Observado
Prediccian Mode10 Original
Predicc10n Modelo en
Milltiples Estados
2494
2537
2497
154
131
017
001
193
bull 174
4138
3545
3917
139
044
131
033
182
122
798
1251
746 bull
507
209
567
001
589
296
6425
6502
6428
143
015
TABIA 46 - Estadtsticas de 1a WMO para los rtos San Pedro y Arekuna
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 67 shy
REFERENCIAS
Akaike H U974a) Stochastic Theory of Minimal Realization IEEE Trans on Automatic Control Vol AC-19 pp 667-674 Dec
Akaike H (l974b) A New Look at the Statistical Model Identification IEEE Trans on Automatic Control Vol AC-19 pp716-726 Dec
Amorocho J and Orlob GT (1961) Nonlinear Analysis of Hydrologic Sistems Water Resources Center Univ Calif (Berkeley) Contrib 40
Dooge J (1973) Linear Theory of Hydrologic Systems United States Department of Agriculture Tech Bulletin 1468
Harrison PJ and CF Stevens (1971) A Bayesian Approach to Short-term Forecasting Oper Res Quart 2 (4) 341-362 l87l
Hino M (197 3) On Line Prediction of Hydrologic Systems Proc XVth Conference IAHR Istambul p 121-129
Ikeda S and Sawaragi Y (1976) Nonlinear Forecasting Models of Water Flow and Quality by Heuristic Self-Organization Methods IIASA Workshop on Recent Developments in Real~Time Forecasting on Water Resources Systems Laxenburg Austria October 1976
Ivakhenko AG (1968) The Group Method of Data Handling A Rival of the Method of Stochastic Approximation Soviet Automatic Control Vol 13 No3 pp45-55
Ivakhenko AG (1970) Heuristic Self-Organization in Problems of Engineering Cybernetics Automatica Vol6 pp 207-219
Ivakhenko AG (19711 Polynomial Theory of Complete system IEEE Trans on Systems-Man and CybernetiCS Vol SMC-l pp 364-378
Kalman RE (1960) A New Approach to Linear Filtering and Prediction Problems J Basic Eng 82 pp34-45
Kalman RE and RS Bucy (1961) New Results in Linear Filter ing and Prediction Theory Trans ASME Ser D J Basic Eng 83 pp 95-107
Kashyap RL and Rao AR U9731 Real Time Recursive Predicshytion of River Flows Automatica Vol 9 pp175-l83
Katayama T (1976) Application of Maximum Likelihood Identification to a River Flow prediction IIASA Workshop on Recen Developments in Real-Time Forecasting and Control of Water Resource Systems Laxenburq Austria October
i
- 68 -
Kitanidis PR and RL Brs U97Bl Real-Time Forecastin of River Flows Report No 235 MIT cambridge Mass
Lorent B (1976 River FloW Prediction and Simulation Mode IIASA Workshop on Recent Developments in Real Timte Forecasting al control of Water Resources Systems Laxenburg Austria
Natale L and Todfni E (1976a) A Stable Estimator for Lil Models 1 water Resources Research 12(4) pp667-67L
Natale L and Todini E (l976b A Stable Estimator for Lil ModelS 2 Real World HydrologiC Application Water Resources Research Vol12 No4 pp 672-676
organizaci6n Meteoro16gica Mundial (WMO) (1975) Inter shycomparison of Conceptual Models Used in operational Hydrologic F( casting Geneva switzerlimd 172 pages
Rodr~guez-Iturbe L JBValdos and J VelAzquez (1978) Key note Lecture on the Applications of Kalman Filter in Rainfall shyRunoff Studies Chapman ConferenCE on Applications of Kalman Fi togt Hydrology Hydraulics and water Resources
Rodr~guez-Iturbe I and JB Valdos (1979) The Geomorphololt Structure of HydrologiC Response Water Resources Research VoL Ndeg6 pp 1409-1420
Sherman LK (l932)Streamflow from Rainfall by the Unit-Gral Method Eng News Record Vol 108 pp501-505middot
Szollosi-Nagy A (1975) An Adaptive Identification and prediction Algorithm for the Real-Time Forecasting of Hydrologic
TimeSElries International Institute for Applied Systems Analys REl)9rt RM-75-22 Laxenburg Austria
SZollosi-Nagy A Todini E and E Wood (19771 A Stateshyel for Real Time Forecasting of Hydrological Time Series JOl Hydrological Sciences 4(1) 61-67
and Bouillot D (1975) A Rainfall-Runoff Kalml in System Simulation in Water Resources ed GC North Holland Publishing Co Amsterdam
Szollosi-Nagy A and Wood BF l976 Adapti Parameter Estimation Algorithms for Real-Time HydrologiC
Case Study paper at the IIASAWMO workshop on Tl lopments in Real-Time Forecasting and Control of Watel
Systems Laxenburg Austria
JM Velazquez and I Rodr1guez-Iturbe (1978) of Hydrologic Forecasting Model Based on the Kall
Cnapman Conference on Application of Kalman Filter to lics and Water Resources
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats
- 69 shy
Va1d~s JB GJ Vicen~ and to Rodrfguez-tturbe Choosing Among Hydrologic Regression Model WllterResources Research 15(2) April 1979
Vol
~
Vald~s JB L Rodrfguez-Iturbe and GJ Vicens Choosing Among Hydrologic Regresmiddotsion Models 2 Extensions to the Standard Mode1 Water Resources Research Vo1 16 en 1980
Velzquez JM (1980) Modelo de Kalman can Ml1ltiples Estados 2 para predieei6n de caudales Proe IX Congreso Latinoamericano de Hidral1liea Mlrida Venezuela
Wood EF and t Rodrfguez-Iturbe (1975) A Bayesian to Analizing Uncertainty Among Flood Frequency Models Water Resources Research Vol 11 (il) pp 839-843
View publication statsView publication stats