Estimation and hypotheses testing in the uni-equational ... · Econometria Estimation and...
88
Econometria Estimation and hypotheses testing in the uni-equational linear regression model: cross-section data Luca Fanelli University of Bologna [email protected]
Transcript of Estimation and hypotheses testing in the uni-equational ... · Econometria Estimation and...
Econometria
Estimation and hypotheses testing in the
uni-equational linear regression model:
cross-section data
Luca Fanelli
University of Bologna
Estimation and hypotheses testing in theuni-equational regression model
- Model
- Compact representation
- OLS
- GLS
- ML
- Constrained estimation
- Testing linear hypotheses
Estimation: cross-section data
Uni-equational linear regression model
yi = x0i� + ui , i = 1; 2; :::; n8>>>>>><>>>>>>:classical:
Cov(ui , uj):=0 , 8i 6= j
E(u2i ):=�2u , 8i
generalized:Cov(ui , uj):=�i;j zero or not
E(u2i ):=�2i
������������We know that the generalized model has to be
intended as `virtual' unless further information is used
(�i;j and �2i are generally unknown)
Compact matrix representation
yn�1
= Xn�k
�k�1
+ un�1
E(u)= 0n�1
, E(uu0):= �n�n
Why do we use this representation ?
Because it is useful in some cases ! It is particularly
useful in order to derive the estimators of interest !
Write
yi = x0i� + ui , i = 1; 2; :::; n
as:
y1 = x01� + u1 , i:=1
y2 = x02� + u2 , i:=2... ... ... ...
yn = x0n� + un , i:=n:
Compactly: 26664y1y2...yn
37775 =26664x01x02...x0n
37775� +26664u1u2...un
37775yn�1
= Xn�k
�k�1
+ un�1
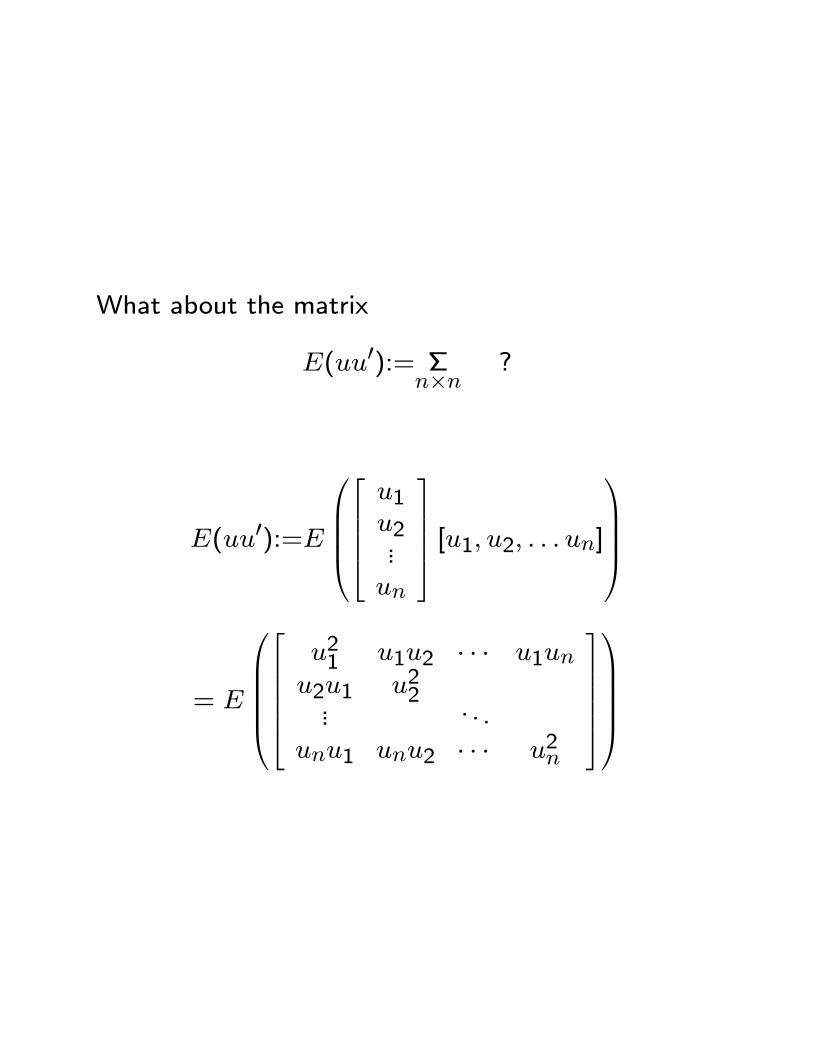
What about the matrix
E(uu0):= �n�n
?
E(uu0):=E
37775 [u1; u2; : : : un]1CCCA
= E
0BBBB@266664
u21 u1u2 � � � u1unu2u1 u22... . . .
unu1 unu2 � � � u2n
3777751CCCCA
=
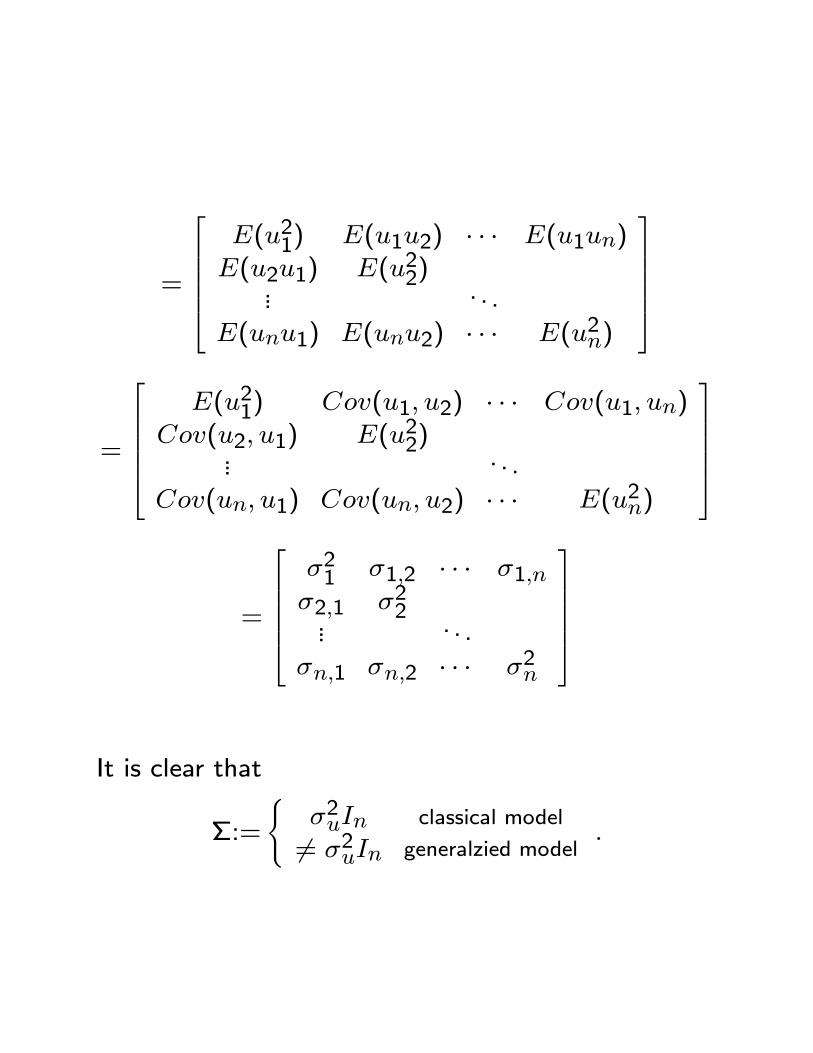
266664E(u21) E(u1u2) � � � E(u1un)E(u2u1) E(u22)... . . .
E(unu1) E(unu2) � � � E(u2n)
377775
=
266664E(u21) Cov(u1; u2) � � � Cov(u1; un)
Cov(u2; u1) E(u22)... . . .
Cov(un; u1) Cov(un; u2) � � � E(u2n)
377775
=
266664�21 �1;2 � � � �1;n�2;1 �22... . . .
�n;1 �n;2 � � � �2n
377775
It is clear that
�:=
(�2uIn6= �2uIn
classical model
generalzied model:
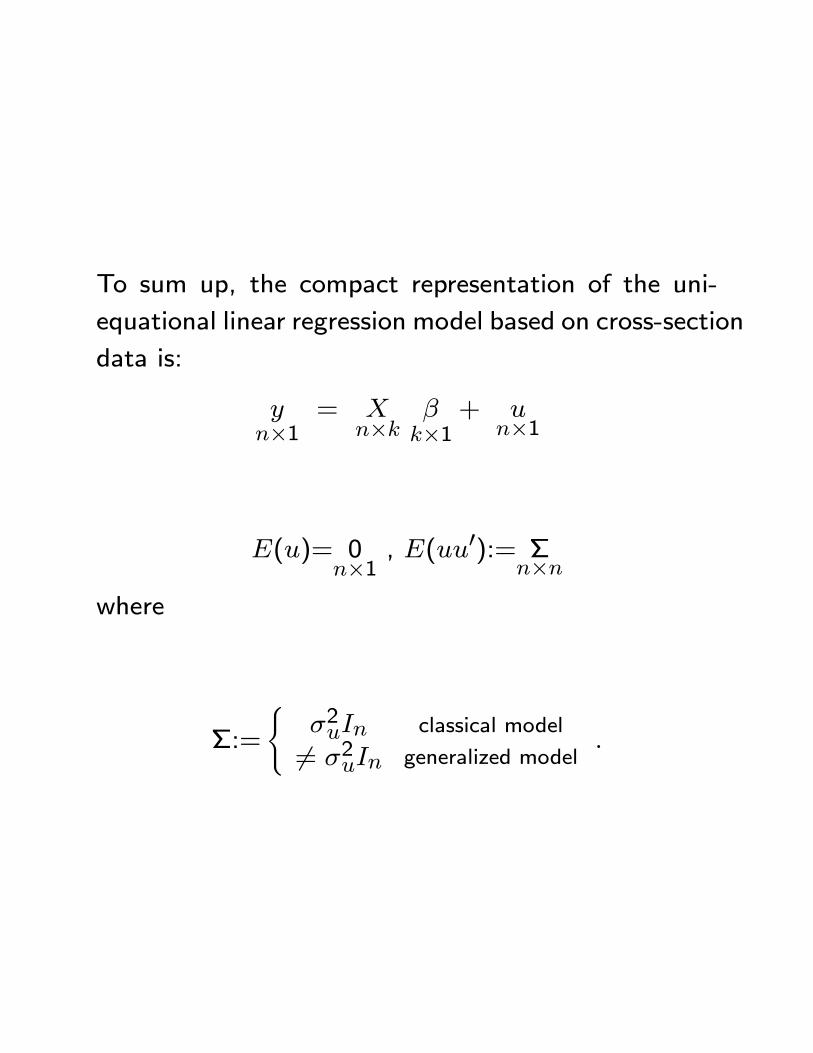
To sum up, the compact representation of the uni-
equational linear regression model based on cross-section
data is:
yn�1
= Xn�k
�k�1
+ un�1
E(u)= 0n�1
, E(uu0):= �n�n
where
�:=
(�2uIn6= �2uIn
classical model
generalized model:
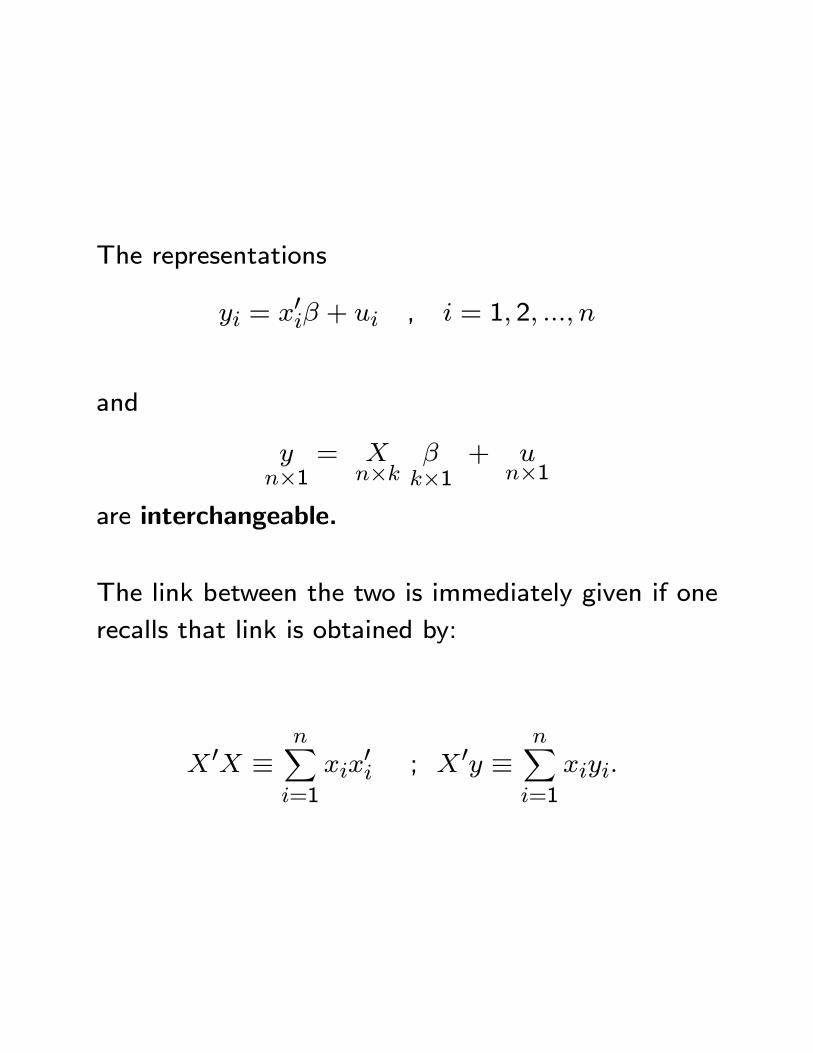
The representations
yi = x0i� + ui , i = 1; 2; :::; n
and
yn�1
= Xn�k
�k�1
+ un�1
are interchangeable.
The link between the two is immediately given if one
recalls that link is obtained by:
X 0X �nXi=1
xix0i ; X 0y �
nXi=1
xiyi:
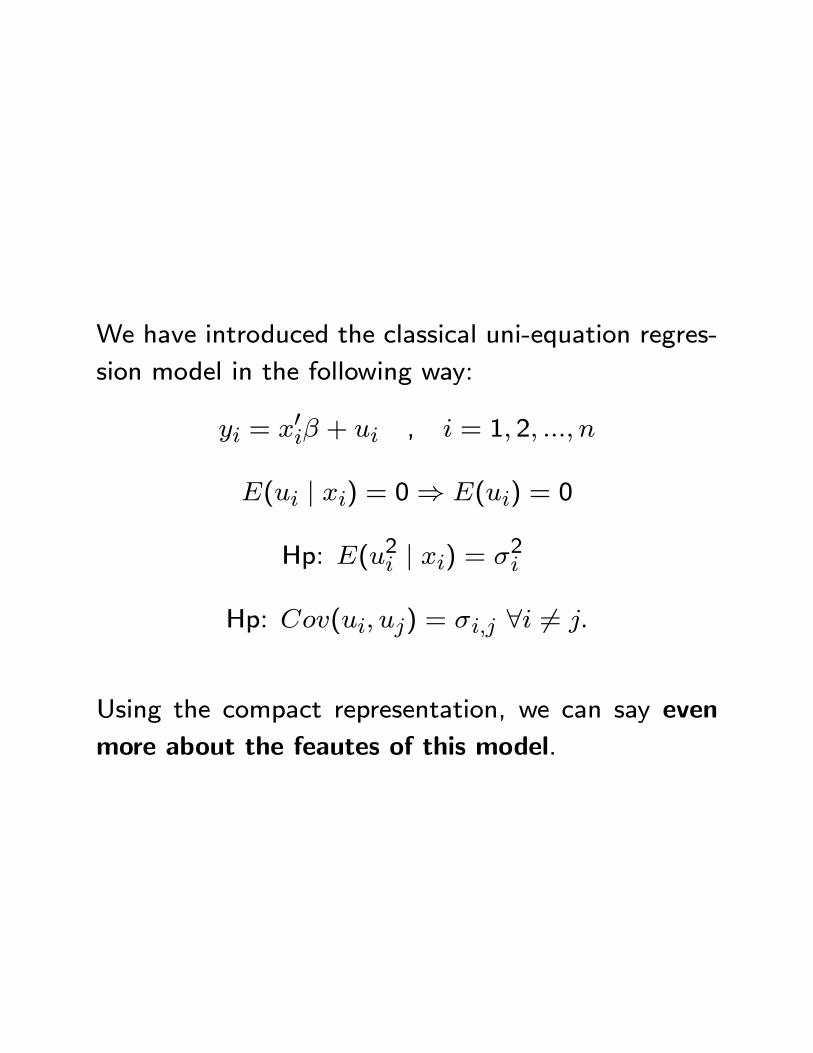
We have introduced the classical uni-equation regres-
sion model in the following way:
yi = x0i� + ui , i = 1; 2; :::; n
E(ui j xi) = 0) E(ui) = 0
Hp: E(u2i j xi) = �2i
Hp: Cov(ui; uj) = �i;j 8i 6= j:
Using the compact representation, we can say even
more about the feautes of this model.
In particular, given the conditional nature of the model
(we are conditioning with respect to regressors) we will
be writing
yn�1
= Xn�k
�k�1
+ un�1
E(u j X) = 0n�1 ) E(u) = 0n�1
E(uu0 j X):= �n�n
) E(uu0) = �n�n
so that u and X can be thought of being stocastic
independent in the sense that
E(u j X) = E(u)
E(uu0 j X) = E(uu0):
It is useful to focus on the meaning n� 1 vector
E(u j X):
From the previous set of slides we know:
E(u j X):=E
0B@0B@ u1
...un
1CA j X1CA :=
264 E(u1 j X)...E(un j X)
375
Now consider e.g.
E(u1 j X) � E(u1 jall stochastic variables within X);
E(u2 j X) � E(u2 jall stochastic variables within X);
...
E(un j X) � E(un jall stochastic variables within X):
Thus E(un j X) = 0 means that conditional on the
knowledge of all regressors x1(i:=1); x2(i:=2), ....,
xn(i:=n) that enter the matrix X, the expected value
of un is zero as the unconditional expectation: E(un jX) = E(un) = 0:
This holds for E(un�1 j X), E(un�2 j X); :::; E(u1 jX) and allows us to write that
E(u j X)=0n�1 ) EX (E(u j X))=0n�1
The condition E(u j X)=0n�1 is usually assumedwith cross-section data and is stronger than it
apparently seems.
Why ? Example on the blackboard.
E(u j X)=0n�1 ) E(u)=0n�1(law of iterated expectations)
The reverse it is not true, E(u)=0n�1 does not implyE(u j X)=0n�1!
For regression models based on time series data
where lags of y appear among the regressors, the
condition E(u j X)=0n�1 doesn't hold (but it holdsE(u)=0n�1)
Example on the blackboard based on:
ci = �0 + �1ci�1 + �2zi + ui , i = 1; :::; n:
Classical model with cross-section data:
OLS estimation
yn�1
= Xn�k
�k�1
+ un�1
E(u j X)= 0n�1
, E(uu0 j X):=�2uIn:
Vector of k + 1 unknown parameters: � = (�0; �2u)0.
Objective function:
Q(�) =1
�2u
nXi=1
(yi�x0i�)2 �1
�2u(y � X �)0(y � X �):
Given
Q(�) =1
�2u
nXi=1
(yi � x0i�)2 � 1
�2u(y �X�)0(y �X�);
the OLS estimator of � is obtained by solving the
problem
min�Q(�)
i.e. the OLS estimator of � is the vector that solves:
�OLS = argmin�Q(�):
First-order conditions:
@Q(�; �2u)
@�= 0k�1
where note that0BBBBBBB@
@Q(�;�2u)@�1
@Q(�;�2u)@�2...
@Q(�;�2u)@�k
1CCCCCCCA [email protected]
1CCCA :
The needed derivative rules are in the Appendix 3.A.3
(Ch. 3) of the textbook.
Exercise at home.
The solution of this problem leads us to
�OLS:=
0@ nXi=1
xix0i
1A�10@ nXi=1
xiyi
1A � �X 0X
��1 �X 0y
�:
The condition
rank(X) = k )�X 0X
�is non-singular
is crucial to obtain a valid (unique) OLS estimator.
The estimator of �2u is obtained indirectly
�2u =1
n� k
0@ nXi=1
u2i
1A � 1
n� ku0u
where ui = yi�x0i�OLS , i = 1; :::; n or, alternatively,u = (y � X �OLS):
Are the estimators of � and �2u correct ?
E(�OLS)=� , E(�2u)=�2u ??
(if yes, under which conditions ?)
Consider that
�OLS:=(X0X)�1X 0[X� + u] = � + (X 0X)�1X 0u
and
E(�OLS):=EX�E��OLS j X
��:
Likewise, E(�2u):=EX�E��2u j X
��:
Estimator of �:
E��OLS j X
�= � + (X 0X)�1X 0E (u j X) :
Hence, if E (u j X) = 0n�1, one has
E��OLS j X
�= �
) E(�OLS):=EX�E��OLS j X
��= EX (�)=�;
the OLS estimator is correct.
Note that if E (u j X) 6= 0n�1, the estimator is nolonger correct (it happens in the regression model with
time series data in which regressors include lags of y).
Estimator of �2u:
To check whether the estimator �2u is correct, we start
from some computations and considerations:
u = (y � X �OLS) = (y � X (X 0X)�1X 0y)
=(X� + u� X (X 0X)�1X 0)(X� + u)
=(X� + u � X � �X(X 0X)�1X 0u)
=(In �X(X 0X)�1X 0)u
The matrix (In�X(X 0X)�1X 0) will be indicated withthe symbol: MXX :
MXX :=(In �X(X 0X)�1X 0) is a `special' matrix(idempotent matrix):
- is symmetric: M 0XX =MXX ;
- is such that MXXMXX =MXX
- rank(MXX)=tr(MXX)=n� k:
(Properties of trace operator on the blackboard).
We have proved that
u := (y �X�OLS) =MXXu:
E��2u j X
�= E
�1
n�ku0u j X
�
=E�1
n�ku0MXXu j X
�
= 1n�kE
�u0MXXu j X
�= 1n�kE
�tr�u0MXXu
�j X
�= 1n�kE
�tr�MXXuu
0� j X�= 1n�ktr
�E�MXXuu
0 j X��
= 1n�ktr
�MXXE
�uu0 j X
��= 1
n�ktr�MXX�
2uIn
�
= �2
n�ktr (MXX) =�2un�k(n� k) = �2u
We have proved that
E(�2u j X) = �2u
) E(�2u):=EX�E��2u j X
��= EX
��2u�=�2u;
the OLS estimator of �2u is correct.
Covariance matrix of �OLS.
V ar��OLS j X
�=V ar
�� + (X 0X)�1X 0u j X
�=V ar
�(X 0X)�1X 0u j X
�:=(X 0X)�1X 0
��2uIn
�X(X 0X)�1
=�2u(X0X)�1:
Recall section
Let v be p�1 stochastic vector with V ar(v):=V (symmetric
positive de�nite) and A m� p non-stochastic matrix. Then
V ar(Av) = Am�p
Vp�p
A0p�m
(sandwich rule).
Assume now that also A is stochastic, i.e. its elements are
random variables. Then the quantity V ar(Av j A) meansthat we can treat A as if it is a non-stochastic matrix ! Hence
V ar(Av j A):=AV ar(v j A)A0:
End of recall section
Note that
V ar��OLS
�:=EX
�V ar
��OLS j X
��=
EX��2u(X
0X)�1�= �2uE
h(X 0X)�1
i
= �2uEh(Pni=1 xix
0i)�1i:
To sum up:
The OLS estimator of � in the linear classical model
based on cross-section data is correct
E(�OLS) = �
and has (conditional) covariance matrix:
V ar��OLS j X
�:=�2u(X
0X)�1:
The OLS estimator of �2u
E(�2u)=�2u
in the linear classical model based on cross-section
data is correct. Usually we are not interested to the
variance of the estimator of �2u but in principle we can
also derive it.
A famous theorem (Gauss-Markov Theorem) applies
to the case in which X does not contain stocastic
variables.
It says that given the linear model
yn�1
= Xn�k
�k�1
+ un�1
E(u)=0n�1 , E(uu0):=�2uIn
the OLS estimator is, in the class of linear correct
estimators, the one whose covariance matrix
V ar��OLS
�:=�2u(X
0X)�1
is the `most e�cient' (minimum covariance matrix).
In our case, X is stochastic (we condition the model
with respect to the regressors).
A version of the Gauss-Markov theorem where X is
stochastic and all variables are conditioned with re-
spect to the elements of X still applies.
This means that any estimator di�erent from the OLS
estimator has (conditional) covariance matrix `larger'
than
V ar��OLS j X
�:=�2u(X
0X)�1:
This is why the OLS estimator applied to cross-section
data (under homoskedasticity) is often called BLUE
(Best Linear Unbiased Estimator).

Recall section
Let1 and2 two symmetric positive de�nite matrices. We say
that1 `is larger' than2 if the matrix1�2 is semipositivede�nite (this means that the eigenvalues of 1� 2 are eitherpositive or zero).
What are eigenvalues ? Given a q � q matrix A the eigenval-
ues are the solutions � (that can be complex numbers) to the
problem
det(�Iq �A) = 0:
If the matrix A is symmetric the eigenvalues are real mumbers.
If A is symmetric and positive de�nite the eigenvalues are real
and positive.
End of recall section
Why do we care about the covariance matrix of the
estimator �OLS ?
Because it is fundamental to make inference !
Imagine that
�OLS j X � N(� , �2u(X0X)�1):
G j X � �2(n� k) , G:=�2u�2u(n� k):
These distributions hold if u j X � N(0 , �2uIn)
(irrespective of whether n is small or large).
It is possible to show that the random vector
�OLS j X is independent on the random
variable G j X:

Observe that given
�OLS j X � N(� , �2u(X0X)�1);
then
�j � �j
�u�cjj�1=2 j X � N(0 , 1) , j = 1; :::; k
where �j is the j-th element of �, �j is the j-th
element of � and cjj is the j-th element on the main
diagonal of the matrix (X 0X)�1:
It then easy to construct a statistial test for
H0 : �j:=0
H1 : �j 6= 0.
Recall that according to the theory of distributions, if
Z � N(0; 1)
G � �2(q)
and Z and G are independent
thenZ�
Gq
�1=2 � t(q):
Consider
H0 : �j:=0
H1 : �j 6= 0
and the test statistic (t-ratio):
t:=�j � 0
�u�cjj�1=2 = �j
s.e.(�j).
Then
t:=�j
s.e.(�j)=
�j � 0
�u�cjj�1=2 =
�j�0�u(cjj)
1=2
�u(cjj)1=2
�u(cjj)1=2
=
�j�0�u(cjj)
1=2
�u�u
=
�j�0�u(cjj)
1=2��2u�2u
n�kn�k
�1=2 =�j�0
�u(cjj)1=2�
Gn�k
�1=2Accordingly,
t j X =
�j�0�u(cjj)
1=2�Gn�k
�1=2 j X � N(0; 1)��2(n�k)n�k
�1=2 j X � t(n�k):
Thus, if disturbances are Gaussian we can test the
signi�cance of each regression coe�cient by running
t-tests. These tests are t(n� k) distributed.
Observe that if n large, t(n� k) � N(0; 1).
OLS with `robust' standard errors
The standard error
s.e.(�j):=�u�cjj�1=2
provides a measure of the variability of the estimator
�j:
This measure, however, has been obtained under the
implicit assumption of homoskedasticity (indeed, to
be fully e�cient OLS requires homoskedasticity !).
Imagine that the `true model' is
yn�1
= Xn�k
�k�1
+ un�1
E(u j X)= 0n�1
, E(uu0 j X):=�=
266664�21 0 � � � 00 �22 0... ... . . . ...0 0 � � � �2n
377775
that means that we have heteroskedasticity !
Assume that an econometrician erraneously believes
that there is homoskedasticity and applies the OLS
estimator.
In this case, the OLS estimator is still correct (proof
as exercise !) but will no longer be e�cient !
Is it possible to improve its e�ciency ?
Then
V ar��OLS j X
�=V ar
�� + (X 0X)�1X 0u j X
�
=V ar�(X 0X)�1X 0u j X
�:=(X 0X)�1X 0�X(X 0X)�1
therefore
(X 0X)�1X 0�X(X 0X)�1 6= �2u(XX)�1:
The matrix (X 0X)�1X 0�X(X 0X)�1 is the `correct'covariance matrix of the OLS estimator in the pres-
ence of heteroskedasticity.
Let us focus in detail on the structure of the covari-
ance matrix X 0�X:
Since � is diagonal, it is seen that
X 0�X:=nXi=1
�2ixix0i:
The US econometrician White has shown that given
the residuals ui:=yi � x0i�OLS, i = 1; 2; :::; n, the
quantity
1
n
nXi=1
u2ixix0i
is a consistent estimator for 1nX0�X.
In other words, for large n
1
n
nXi=1
u2ixix0i !p
1
n
nXi=1
�2ixix0i:
The consequence of this result is the following: when
the econometrician has the suspect that homoskedas-
ticity might not hold in his/her sample, he/she might
take the standard errors not from the covariance ma-
trix �2u(XX)�1 but rather on the covariance matrix
(X 0X)�10@ nXi=1
u2ixix0i
1A (X 0X)�1
= (nXi=1
xix0i)�10@ nXi=1
u2ixix0i
1A ( nXi=1
xix0i)�1
The standard errors are `robust' in the sense that they
take into account the heteroskedasticity.
The robust standard errors are also known as `White
standard errors'.
Every econometric package complements OLS estima-
tion with these standard errors.
Generalized model: GLS estimation
yn�1
= Xn�k
�k�1
+ un�1
E(u j X)= 0n�1
, E(uu0 j X)=� 6= �2uIn:
Vector of unknown parameters: � = (�0; vech(�))0.
It is impossible to estimate � on the basis of n obser-
vations. We need some assumptions.
Hp: � is known.
Objective function:
Q(�) = (y � X �)0��1(y � X �)
�nXi=1
nXj=1
ij(yi � x0i�)(yj � x0j�) ij elements of ��1:
GLS estimator of � (given �) is obtained by solving
the problem
min�Q(�)
i.e. the GLS estimator of � is the vector that solves:
�GLS = argmin�Q(�):
The solution of this problem leads us to
�GLS:=�X 0��1X
��1 �X 0��1y
�:
The condition
rank(X) = k )�X 0��1X
�is non-singular
is crucial to obtain a valid (unique) GLS estimator.
It can be noticed that the GLS estimator of � is
`virtual' in the sense that it requires the knowledge of
� otherwise it can not be computed.
�GLS=� +�X 0��1X
��1 �X 0��1u
�
E(�GLS j X) = � +�X 0��1X
��1X 0��1E(u j
X) = �:
V ar(�GLS j X) = V ar(�+�X 0��1X
��1 �X 0��1u
�j
X)
=V ar(�X 0��1X
��1 �X 0��1u
�j X) =
�X 0��1X
��1
The GLS estimator is correct under the assumption
E(u j X) = 0n�1 and has conditional covariancematrix
V ar(�GLS j X) =�X 0��1X
��1:

A famous theorem (Aitken Theorem) applies to the
case in which X does not contain stocastic variables.
It says that given the generalized linear model
yn�1
= Xn�k
�k�1
+ un�1
E(u)= 0n�1
, E(uu0):=� 6= �2uIn
the GLS estimator is, in the class of linear correct
estimators, the one whose covariance matrix
V ar��GLS
�:=(X 0��1X)�1
is the `most e�cient' (minimum covariance matrix).
In our case, X is stochastic (we condition the model
with respect to the regressors).
A version of the Aitken theorem where X is stochastic
and all variables are conditioned with respect to the
elements of X still applies.
This means that any estimator di�erent from the GLS
estimator has (conditional) covariance matrix `larger'
than
V ar��GLS j X
�:=(X 0��1X)�1:
Feasible GLS estimators
There are cases in which the GLS is `feasible', i.e. it
can be calculated by using the information in the data.
Imagine the model is:
yi = �0 + �1x1;i + �2x2;i + ui , i = 1; :::; n
E(ui j xi) = 0) E(ui) = 0
Hp: E(u2i j xi) = �2i = h (x1i)2 , h > 0
Hp: Cov(ui; uj) = 0 , 8i 6= j:
We can transform the model by dividing both sides by1�i, obtaining
yi�i=1
�i�0 +
1
�i�1x1;i +
1
�i�2x2;i +
1
�iui
which is equivalent to
yi
(h)1=2 x1i=
1
(h)1=2 x1i�0 +
1
(h)1=2 x1i�1x1;i
+1
(h)1=2 x1i�2x2;i+
1
(h)1=2 x1iui
which is equivalent to
yix1i
= �01
x1i+ �1 +
x2;i
x1i�2 +
uix1i
y�i = �1 + �0x�1;i + �2x
�2;i + u�i
where
y�i :=yix1i
, x�1;i:=1
x1i, x�2;i:=
x2;i
x1i, u�i :=
uix1i.
Now, E(�u�i�2 j xi) = E(
�uix1i
�2 j xi)=�1x1i
�2E(u2i j xi) =
�1x1i
�2h (x1i)
2 = h 8i:
The transformed model
y�i = �1 + �0x�1;i + �2x
�2;i + u�i
is homoskedatic because E(�u�i�2 j xi):=h=const 8i:
OLS can be applied to estimate �1, �0 and �2e�ciently.
This transformation is equivalent to the following idea:
Hp : �2i :=h (x1i)2 , h > 0
) �:=h
266666664
�x1;1
�20 � � � 0
0�x1;2
�2 � � � 0... ... . . . ...
0 0 � � ��x1;n
�2
377777775 :=hV
�GLS:=�X 0 (hV )�1X
��1 �X 0 (hV )�1 y
�=�X 0V �1X
��1 �X 0V �1y
�it is feasible because the matrix V is known !
Maximum Likelihood (ML) estimation
Before discussing the ML estimation of the linear re-
gression model, we overwiew this crucial estimation
method.
Statistical model =
(stochastic distributionsampling scheme
)
f(DATA; �) = L(�) likelihood function.
The g�1 vector of unknown parameters � belongs tothe (open) space �, and the `true' value of �, �0, is
an interior point of �.
The ML method is parametric because it requires the
knowledge of the stochastic distribution of the vari-
ables, other than the sampling scheme.
Model (classical to simplify): yi = x0i� + ui
Our parameters are: �:=(�0, �2u)
Key hypothesis (normality):
yi j xi � N(x0i� , �2u) , i = 1; :::; n
Recall that E(yi j xi)=x0i�;
This implies
ui j xi � N(0 , �2u) , i = 1; :::; n:
Thus, for each �xed j 6= i uiuj
!j xi;xj � N
00
!,
"�2u 00 �2u
#!:
More generally, we can write
u j X:=
0B@ u1 j X...
un j X
1CA � N�0n�1 , �
2uIn
�so that
f(u j X; �):=nYi=1
f(ui j X; �)
where
f(ui j X; �):=1
�u(2�)1=2e� 1
2�2uu2i
=1
�u(2�)1=2e� 1
2�2u(yi�x0i�)
2
:
Then
L(�) = f(DATA; �) =nYi=1
f(ui j X; �):
It will be convenient to focus on the log-likelihood
function:
logL(�) =nXi=1
log f(ui j X; �)
= C � n
2log �2u �
1
2�2u
nXi=1
(yi � x0i�)2
� C � n
2log �2u �
1
2�2u(y �X�)0(y �X�):
The ML estimator of � is obtained by solving the
problem
max�logL(�)
i.e.
�ML = argmax logL(�):
As is known, in order to obtain �ML it is necessary to
solve the �rst-order conditions:
sn(�) =@ logL(�)
@�=
0BBBBBB@
@ logL(�)@�1
@ logL(�)@�2...
@ logL(�)@�g
1CCCCCCA = 0g�1
that means that �ML is such that sn(�ML) = 0g�1:
The vector sn(�) is known as the score (gradient) of
the likelihood function.
It is not always possible to solve the �rst order condi-
tions analytically; in many curcumstances (e.g. non-
linear restrictions) numerical optimization procedures
are required.
Note that
sn(�) =@ logL(�)
@�=@Pni=1 log f(ui j xi; �)
@�
=nXi=1
@ log f(ui j xi; �)@�
=nXi=1
si(�):
Each component si(�) of the score depends on thedata, hence it is a random variable !
To be sure that �ML is a maximum (and not a mini-mum), it is further necessary that the Hessian matrix
Hn(�) =@
@�0
@ logL(�)
@�
!=
@
@�0sn(�) =
@2 logL(�)
@�0@�
=
0BBBBBBBB@
@2 logL(�)@2�1
@2 logL(�)@�2@�1
� � � @2 logL(�)@�g@�1
@2 logL(�)@�1@�2
@2 logL(�)@2�2
� � � @2 logL(�)@�g@�2
... ... . . .@2 logL(�)@�1@�g
@2 logL(�)@�2@�g
� � � @2 logL(�)@2�g
1CCCCCCCCAg�g
be (semi)negative de�nite at the point �ML,i.e. Hn(�ML) � 0:
We de�ne (Fisher) Information Matrix the quantity:
In(�) = �E @2 logL(�)
@�0@�
!= �E (Hn(�))
and it can be shown that under a set of regularity
conditions, including the hypothesis of correct speci-
�cation of the model, one has the equivalence:
In(�) = �E @2 logL(�)
@�0@�
!= E
�sn(�)sn(�)
0�
= E
0@"@ logL(�)@�
# "@ logL(�)
@�
#01A :
The Asymptotic Information Matrix is given by thequantity
I1(�) = limn!1
1
nIn(�) = lim
n!11
nE(�Hn(�)):
The inverse of the matrix I1(�) represents a lowerbound for any estimator of �: this means that any
estimator of � will have covariance matrix `greater'
than or at most equal to I�11 (�):
A crucial requirement for ML estimation is that
logL(�0) > logL(�) for each � 2 �n f�0g
condition that ensures the existence of a
global maximum.
However, also situations of the time:
logL(�0) > logL(�) for � 2 N�0 � �
where N�0 is a neighborhood of �0 are potentially �ne,local maximum.
Properties of ML estimator
Crucial Assumption: the model is correctly speci�ed
(the underlying statistical model is correct).
1. In general,
E(�ML) 6= �0
namely the ML is not correct !
2. Under general conditions the ML estimator is con-
sistent:
�ML !p �0:
3. Under general conditions the ML estimator is
Asymptotically Gaussian:
n1=2��ML � �0
�!D N(0g�1; V�):
This property suggests that one can do standard
inference in large samples !
4. Under general conditions the ML estimator esti-
mator is asymptotically e�cient, in particular
V�= [I1(�)]�1 :
The properties 3-4-5 are asymptotic properties and
make the ML estimator `optimal'.
max� logL(�) )
max�
C � n log �2u �
1
2�2u(y �X�)0(y �X�)
!0B@ @ logL(�)
@�@ logL(�)@�2u
1CA = 0k�10
!k � 11� 1
The needed derivative rules are in the Appendix 3.A.3
(Ch. 3) of the textbook.
The solution of this problem leads us to
�ML:=
0@ nXi=1
xix0i
1A�10@ nXi=1
xiyi
1A � �X 0X
��1 �X 0y
�
�2u =1
n
0@ nXi=1
u2i
1A � 1
nu0u
where ui = yi�x0i�ML , i = 1; :::; n or, alternatively,
u = (y � X �ML):
Recall that by contruction,
sn(�ML; �2u) = 0k�1
and
Hn(�ML; �2u) is negative semide�nite.

Constrained estimation
Given
y = X� + u with u j X � N(0n�1; �2uIn)
general (linear) restrictions on � can be represented
either in implicit form or in explicit form.
Implicit form:
Rq�k
�k�1
:= rq�1
or, alternatively
Rq�k
�k�1
� rq�1
:= 0q�1
where q is the # of restrictions;
Rq�k
�k�1
� rq�1
:= 0q�1
R is a known q � k matrix whose rows select the
elements of � that must be restricted;
r is a known q � 1 vector.
EXAMPLES: BLACKBOARD !
Explicit form:
�k�1
:= Hk�a
'a�1
+ hk�1
where a = (k � q),
H is a known k � a selection matrix;
' is the a� 1 vector that contains the elements of �which are not subject to restrictions (free parameters);
h is a known k � 1 selection vector.
EXAMPLES: BLACKBOARD !
One can write the linear contraints on � either in im-
plicit or in explicit form.
The two methods are alternative but equivalent.
For certain problem it is convenient the implicit form
representation, for others it is convenient the explicit
form representation.
It is therefore clear that there must exist a connection
between the matrices R and H and r and h:
In particular, take the explicit form
�:=H'+ h
and multiply both sides by R, obtaining
R�:=RH'+Rh:
Then, since the right-hand-side of the expression above
must be equal to r, it must hold
RH:=0q�a
Rh:=r:
This means that the (rows of the) matrix R lie in the
null column space of the matrix H
(sp(R) � sp(H?)).
Recall: Let A a n�m matrix, n > m, with (column) rank
m; A = [a1 : a2 : :::: : am].
sp(A) = fall linear combination of a1; a2; :::; amg � Rn
sp(A?) =nv, v0ai = 0; for each i = 1; :::;m
o� Rn
all the vectors in sp(A?) are said to lie in the null column spaceof the matrix A:
LetA? be a n�(n�m) full column rank matrix that satis�es
A0?A = 0(n�m)�mA0A? = 0m�(n�m):
A? is called orthgonal complement of A. The n � n matrix
[A : A?] has rank n and forms a basis of Rn.
Constrained estimation means that one stimates the
model under H0, i.e. imposing the restriction implied
by the null hypothesis.
Suppose that
H0:R�:=r , (H0:�:=H'+ h)
has been accepted by the data.
Then we wish to re-estimate the null model, i.e. the
econometric model that embodies the linear restric-
tion.
In this case, using the restrictions in explicit form is
convenient.
Indeed, the null model can be written as
y = X[H'+ h] + u
and re-arranged as
y�n�1
= X�n�a
'a�1
+ un�1
where
y�:=y �Xh
X�:=XH:
We obtain a transformed dynamic linear regression
model whose parameters are no longer in � = (�0; �2u)0
but in �� = ('0; �2u)0: Recall that ' is the a�1 vector,
a = k�q, that contains the unrestricted parameters,i.e. those parameters which are not a�ected by H0.
We know very well how to estimate ' and �2u and
their properties:
' = (X�0X�)�1X�0y� = (H 0X 0XH)�1H 0X 0(y�Xh)
where
' = 'CML or ' = 'CLS;
~�2u =1
n� a(y� �X�')0(y� �X�'):
The constrained ML or LS estimators of � is obtained
indirectly as
~� = �CML = H'CML + h
~� = �CLS = H'CLS + h
and inherit the same properties as 'CML.
Obviously, the asymptotic covariance matrix of the
restricted estimator ~� will be
V ar(~� j X):=V ar(H'CLS + h j X)
=HV ar('CLS j X)H 0=H(X�0X�)�1H 0
=H(H 0(X 0X)H)�1H 0:
It can be proved thatH(H 0(X 0X)H)�1H 0 � �2u(X0X)�1
regardless of whether H0 is true or not !
This means that imposing restrictions on � has the ef-
fect of reducing the variability of the estimator (thus
the standard errors of the single coe�cients). Of
course, this operation is `correct' only when H0 is usp-
ported by the data.
In the `traditional' textbook econometrics the deriva-
tion of constrained estimator is usually obtained by
exploiting the restriction in implicit form, by solving
either
min�
(Q(�)
subject to R� � r = 0
or
max�
(logL(�)
subject to R� � r:=0:
In order to solve these problems it is necessary to apply
a technique based on Lagrange multipliers.
For instance, in the case of ML estimation, the prob-
lem above amounts to solving
max�(�)
where
(�; �) = logL(�) + �1�q
0 (R� � r)q�1
is the Lagrangean function and � is the vector of La-
grange multipliers. Each element of � gives a weight
to the corresponding linear restriciton.
By using the restrictions in explicit form we stick to
the standard framework without the need of using con-
strained estimation techniques. More speci�cally, we
have turned a restricted estimation problem into an
unrestricted estimation problem (' is estimated
unrestrictedly!)
Testing problem
Given
yt = x0i� + ui , i = 1; :::; n
or objective is testing
H0 : R�:=r , (H0 : �:=H'+ h)
vs
H1 : R� 6= r , (H1 : � 6= H'+ h).
A testing problem requires solving a probabilistic de-
cision rule that allows the researcher establishing
whether the evidence provided by the data is closer
to H0 or to H1.
This decision is based on the following ingredients:
a Pre-�xed nominal type I error (or signi�cance level)
� = Pr(rejecting H0 j H0):
The cases we typically address are such that �
is actually an asymptotic error in the sense that
Pr(reject H0 j H0) can be evaluated asymptoti-cally (for large n);
b Test statistic Gn = Gn(�) which is a function of �
and whose distribution is known under H0asymptotically (later on we see that Gn = Gn(�)
usually belongs to one of three families);
c Decision rule of the type:
reject H0 if Gn(�) > cv(1��),where cv(1��) is the 100*(1��) percentile takenfrom the (asymptotic) distribution of Gn = Gn(�)
under H0;
d To understand whether the test does a good job
one should be able to evaluate the function
�1(�) = limn!1Pr( reject H0 j H1)
= Pr(G1(�) � cv(1��) j H1)
known as asymptotic power function.
A`desired' test should be such that once one �xes the
type I error (usually 5% or 10%), the test is consistent
meaning that
�1(�) = limn!1Pr(reject H0 j H1)
= Pr(G1(�) � cv(1��) j H1)! 1:
When estimation is perfomed with ML we can clas-
sify the test statistic Gn = Gn(�) into three families,
known as Wald, Lagrange Multipliers (LM) and Like-
lihood Ratio (LR) tests.
However, the existence of these three families is not
solely con�ned to ML estimation but can be extended
to other classes of estimators as well.
General philosophy:
Wald These type of tests are based on the idea of
checking whether the unrestricted (ML) estimator
of � (i.e. the estimator obtained without impos-
ing any constraint) is `close in a statistical sense'
to H0, namely whether
R� � r � 0q�1which is what one would expect if H0 is true.
Computing a Wald-type test requires estimat-
ing the regression model one time without any
restriction.
LM These type of tests are based on the the estima-
tion of the null model (i.e. the regression model
under H0), hence are based on the constrained
estimator of �. Let � be the unconstrained (ob-
tained under H1) estimator of � and ~� its con-
strained (obtained under H0) counterpart. The
idea is that if H0 is true, the score of the unre-
stricted model, evaluated at the constrained esti-
mator (recall that sn(�) = 0k�1) should be `closeto zero in a statistical sense', i.e.
sn(~�) � 0k�1:
Computing a LM test requires estimating the
regression model one time under the restrictions
implied by H0 (however, it also requires that we
know the structure of the score of the unrestricted
model !).
LR The type of tests are based on the idea of estimat-
ing the linear regression model both under H0(~�) and without restrictions (�); estimation is
carried out two times. If H0 is true, the distance
between the likelihood functions of the null and
unrestricted models should not be too large (note
that one always has logL(~�) � logL(�)).
Recall: Let v a p� 1 stochastic vector such thatv � N(0p�1; V ), where V is a p � p covariance matrix
(hence symmetric positive de�nite).
Then
v0V �1v � �2(p):
The same result holds if ` � ' is replaced with `!D '.
Note also that kvk2 = (v0v)1=2 is the Euclidean norm of
the vector v (a measure of its length in the space Rp, i.e. a
measure of the distance of the vector v from the vector 0p�1).One can generalize this measure by de�ning the norm kvkA =(v0Av)1=2, where A is a symmetric positive de�nite matrix;
this norm measures the distance of v from 0p�1 `weighted' bythe elements of the matrix A.
This means that the random variable (quadratic form) v0V �1vmeasures a weighted distance of v from 0p�1.
Wald test
Let � be either the OLS or the ML estimator of � in
the classical regression model with corss-section data.
Standard Assumptions.
We start from the assumption (Gaussian)
u j X � N(0n; �2uIn):
which implies that
� j X � N(�; �2u(X0X)�1):
From the properties of the multivariate Gaussian dis-
tribution we obtain
R(� � �)q�1
j X � N(0q; �2uR(X
0X)�1R0):
The result above implies that under H0:R�:=r :
R� � rq�1
j X � N(0q�1; �2uR(X
0X)�1R0):
Interpretation: the left-hand side can be regarded as
a measure of the distance of the q � 1 (stochastic)
vector R� from the known vector r (or the distance
of R��r from the vector 0q�1); moreover, we have asymmetric positive de�nite matrix (�2uR(X
0X)�1R0)with respect to which we can weight this distance.
Imagine �rst that �2u is known (unrealistic).
We de�ne the test statistic (a quadratic form from
Gaussian)
Wn =h(R� � r)
i0 n�2uR(X
0X)�1R0o�1 h
(R� � r)i:
From the properties of multivariate Gaussian
distribution:
Wn j X � �2(q):
Thus, �xed �, one rejects H0 ifWn � cv(1��), wherecv(1��) is the 100*(1-�) percentile taken from the
�2(q) distribution (Pr[�2(q) > cv(1��)] = �). One
accepts H0 otherwise.
Since �2u is generally unknown, we replace it with the
estimator �2u.
Please recall that we know that under our assump-
tions:
G j X � �2(n� k) , G:=�2u�2u(n� k):
Recall also that from the theory of distributions, if
G1 � �2(q1)
G2 � �2(q2)
and G1 and G2 are independent
then �G1q1
��G2q2
� � F (q1; q2):
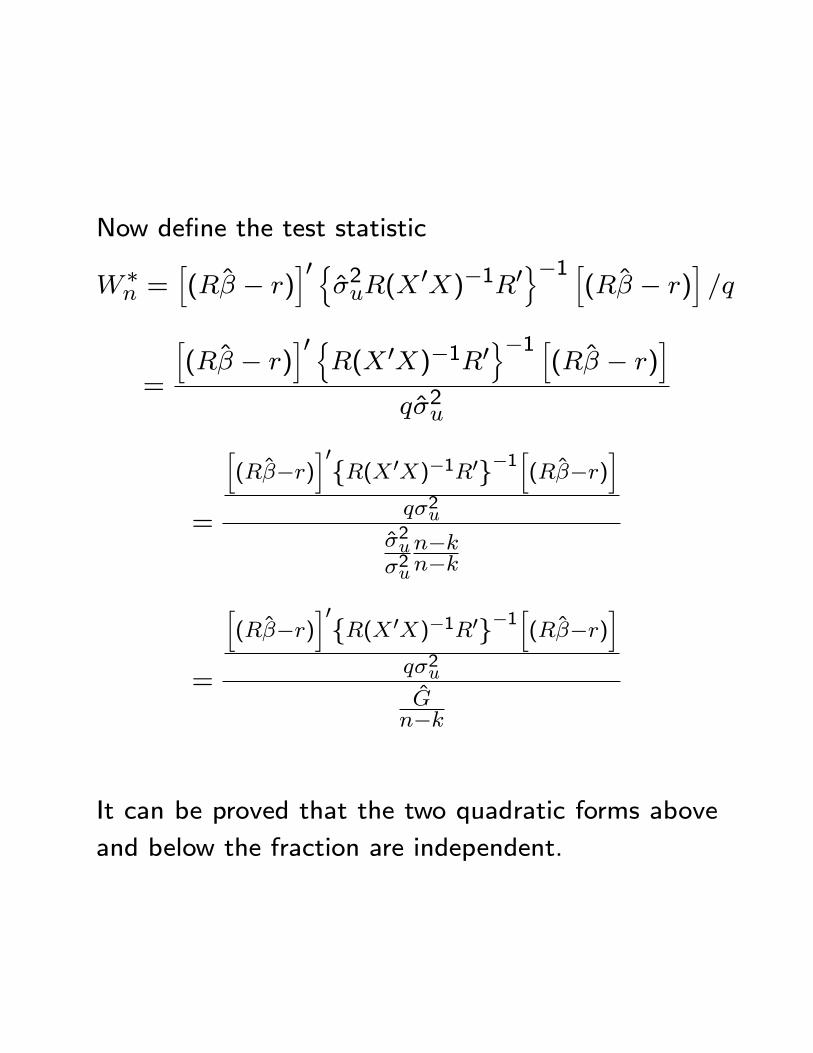
Now de�ne the test statistic
W �n =
h(R� � r)
i0 n�2uR(X
0X)�1R0o�1 h
(R� � r)i=q
=
h(R� � r)
i0 nR(X 0X)�1R0
o�1 h(R� � r)
iq�2u
=
h(R��r)
i0fR(X 0X)�1R0g�1
h(R��r)
iq�2u
�2u�2u
n�kn�k
=
h(R��r)
i0fR(X 0X)�1R0g�1
h(R��r)
iq�2uGn�k
It can be proved that the two quadratic forms above
and below the fraction are independent.
Accordingly,
W �n j X =
h(R��r)
i0fR(X 0X)�1R0g�1
h(R��r)
iq�2uGn�k
j X
��2(q)q
�2(n�k)n�k
� F (q; n� k):
Thus, �xed �, one rejects H0 ifWn � cv(1��), wherecv(1��) is the 100*(1-�) percentile taken from the
F (q; n � k) distribution (Pr[�2(q) > cv(1��)] = �).
One accepts H0 otherwise.
General linear hypotheses on � can be tested by using
the F-distribution.
This is true if u j X � N(0n; �2uIn) irrespective of
whether n is small or large.
Note that F (q; n� k)! �2(q)=q for n!1:
LM and LR tests will be reviewed when we deal with
the regression model based on time series data.