Agenda for Wednesday Dec 7 th Energy House of cards Energy notes
Upload
dearsaswatCategory
view
217download
0
7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 1/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
Energy theorems
1 Stationarity of the potential energy
Let us study a linearly elastic structure which is in an undeformed, stress free (so-called
“reference”) state in the beginning. Then some loading is applied on the structure, under whichit deforms, hence stresses and strains evolve in the elastic material. The internal stresses and
strains are connected by the material laws of linear elasticity. The question is what the final
state of the deformation process is, i.e., what the equilibrium configuration of the structure is?
1.1 External potential energy
An external force is called potential if the work done by the force is path independent. In
the case of a potential force, the work that the force does depends only on the starting and the
end positions of its point of application, but does not depend on the (shape of the) path along
which the point of application is displaced.
If a force is potential, then there exists a potential energy function Πext(x,y ,z ) from which
the components of the force can be directly computed as:
F x = −∂ Πext(x,y ,z )
∂x, F y = −
∂ Πext(x,y ,z )
∂y, F z = −
∂ Πext(x,y ,z )
∂z . (1)
Example. The weight of a body is a typical potential force. The weight mg always points
“down”, toward the center of Earth. Here m denotes the mass of the body and g is the gravi-
tational acceleration. Such a weight load is shown in Fig. 1: the force G = mg acts at height
z = h downward in the given coordinate system, where axis z crosses the center of Earth. Thus,
the projections of G on the coordinate axes are: F x = 0, F y = 0, F z = −G. The potential of
force G isΠG(z ) = mgz + C,
where C is an arbitrary constant. The above potential gives the components of the force, indeed,
which can be proven using Eq. (1):
F x = −∂ ΠG(z )
∂x= 0, F y = −
∂ ΠG(z )
∂y= 0, F z = −
∂ ΠG(z )
∂z = −mg = −G.
The change in the external potential while the point on which G acts is displaced from height
h to z = 0 is the potential in the final position minus the potential in the starting position:
ΠG|z=0 − ΠG|z=h = −mgh. (2)
1

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 2/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
This quantity is the opposite of the work done by the force G on the translation h:
W G = 0h
F z dz = 0h
−∂ ΠG(z )∂z
dz = −mg [z ]0h = mgh. (3)
During this translation force G loses some of its ability to do work: exactly as much as the
potential decrease (2). The potential energy of a force is the ability of the force to do work.
G
h
0 x
z
Figure 1: A weight load G of a body
The total (or exact) differential of the potential energy function Π(x,y ,z ) of a force is the
opposite of the elementary work of the force:
dΠ = ∂ Πext
∂xdx + ∂ Πext
∂ydy + ∂ Πext
∂z dz = −F x dx − F y dy − F z dz = − dW. (4)
Therefore, the change in the potential energy of a force between an initial state A and a final
state B is the opposite of the work done by the force between these states:
W ABext =
BA
dW = −
BA
dΠ = −
ΠBext − ΠA
ext
(5)
1.2 Internal potential energy
The internal potential energy is the stored elastic energy that accumulates in the elasticmaterial during the deformation of the body from the undeformed, stress-free state to some
distorted configuration. It is the opposite of the internal work that the internal stresses do on
the (associated) internal strains during the deformation:
Πint = −W int. (6)
Since the internal associated work is negative, the internal potential is always positive.
In the case of a linearly elastic spring, the internal potential energy is:
Πint,spr =
k
2 x
2
, (7)
2

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 3/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
where x is the elongation of the spring with respect to its stress-free reference state. Notice that
the internal spring force R can be obtained from the above potential using the derivations given
by (1):
R = −∂ Πint,spr
∂x= −kx.
In the case of a linearly elastic bar of length ℓ under tension/compression, the internal
potential is
Πint,bar =EA
2
ℓ0
ε2z(z ) dz, (8)
where EA is the normal stiffness of the bar and εz is the normal strain caused by some force
load. If the normal force distribution is constant along the bar, then the above formula yields:
Πint,bar = EA2ℓ
∆ℓ2N , (9)
where ∆ℓN = ∆ℓ − ∆ℓk is the elongation of the bar with respect to the stress-free state, due
to the force load. It is the total elongation minus the elongation ∆ℓk caused by the kinematic
loading. Typical kinematic loadings are the thermal load (α∆T ℓ, positive for increasing tem-
perature), the fabrication error (positive if the member was made longer than planned), and the
support displacement (positive if the bar in the stress-free state is too long to fit between the
body and the displaced support).
In the case of a linearly elastic bent beam of length ℓ, the internal potential is
Πint,beam = EI 2 ℓ0
κ2(z ) dz, (10)
where EI is the bending stiffness of the beam and κ is the curvature caused by some force load.
1.3 The theorem
The total potential energy is the sum of the internal and external potentials:
Πtot = Πint + Πext. (11)
The stationarity theorem of the potential energy: among all the geometrically admissible displacement systems of an elastic body the real one corresponds to a stationary value of the
total potential energy. It is the necessary and sufficient condition of equilibrium: it gives the
geometrically admissible displacement system which is statically admissible, too, i.e., the real
one.
1.4 Application of the theorem
The degree of freedom of a structure is the number n of independent (geometrical) parame-
ters that define all the geometrically admissible configurations of the structure.
3

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 4/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 e
2
(a) (b) (c)
e
e
e
e
3
1
2
1
1
e
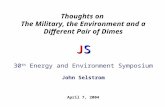
Figure 2: Degree of freedom: the number of independent geometric parameters needed to
define all the geometrically admissible configurations of the body. (a) A rigid body supported
by a fixed hinge and two elastic bars: the rotation e1 about the hinge can describe any admissible
displacement of the body. (b) A rigid body supported by a roller and two elastic bars: therotation e1 and the horizontal translation e2 of the roller can describe all the geometrically
admissible configurations. (c) A rigid body supported by three elastic bars: the rotation e1 and
the horizontal and vertical translations e2, e3 of some point of the body are needed to define all
the admissible displacements.
The degree of freedom of an elastic rod is infinite: we need to define the position of each
point of the beam axis and give the rotation of each cross section, but there are infinitely many
points of the beam axis, and so there are also infinitely many cross sections.
For the sake of simplicity, we only deal with structures that are composed by some rigid
bodies connected to elastic springs and/or truss members. The geometry of these structures canalways be defined by a finite number n of parameters, which are denoted by e1, e2, . . . , en and
can be translations or rotations, as shown in Fig. 2. The total potential energy can be given as a
function of these parameters: Πtot = Πtot(e1, e2, . . . , en).
The necessary and sufficient condition of equilibrium is that the total potential energy must
be stationary. It means that the potential energy function Πtot(e1, e2, . . . , en) must have a hor-
izontal tangent (plane) if the structure is in an equilibrium configuration. The mathematical
conditions for a multi-variable scalar function to have horizontal tangent plane is that all the
partial derivatives of the function with respect to its variables must be zero.
Thus, the potential energy is stationary if the following equations hold:
∂ Π(e1, e2, . . . , en)∂e1
= 0,
∂ Π(e1, e2, . . . , en)
∂e2= 0,
· · · · · ·
∂ Π(e1, e2, . . . , en)
∂en= 0.
(12)
The above expressions are equivalent to the equilibrium equations of the structure. The real dis-
placement system of the structure can be obtained by solving Equations (12) for the geometric
parameters e1, e2, . . . , en.
4

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 5/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
2 Stationarity of the complementary potential energy
Let us have a linearly elastic structure which is in an undeformed, stress free (so-called“reference”) state in the beginning. Then some (force or kinematic) loading is applied. The
question is what the real force system of the structure is after loading?
2.1 External complementary potential energy
In the lecture about mechanical work we have seen that a force acting on a particle does
work on the displacement of the particle. However, we have also defined complementary work,
which is the work done by a given displacement of a particle on the force acting on it.
In the case of a load bearing structure, prescribed (absolute) displacements can only be
support displacements: some supports may translate in a direction which may originate fromthe settlement of the foundation, for example, as shown in Fig. 3.
0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
es
es es
1
(b) (c)
1S
(a)
2
A
B
C
Figure 3: Support displacement of a structure due to the settlement of a foundation: prescribed
displacement at point B. (a) The given displacement. (b) Support B translates with the given
displacement eS (no deformations are indicated). (c) The complementary work done by the
prescribed displacement on the bar force S 1: W = eS · S 1. Notice that the same effect evolves
if the bar is cooled down, or fabricated shorter.
The change in the external complementary potential energy is defined to be the opposite of
the complementary work done by prescribed displacements:
Πext = −W ext. (13)
2.2 Internal complementary potential energy
In an elastic material the internal complementary potential energy is the opposite of the
internal complementary work done by the strains on the (associated) stresses:
Πint = −W int. (14)
In the case of a linearly elastic spring, the internal complementary potential energy is:
Πint,spr =
1
2k R
2
, (15)
5

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 6/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
where R is the spring force.
In the case of a linearly elastic bar, the internal complementary potential, if the normal force
is constant along the whole length ℓ, is
Πint,bar = ∆ℓkS +ℓ
2EAS 2. (16)
Here ∆ℓk is the elongation of the bar caused by some kinematic loading. The complementary
potential energy is the area enclosed by the force-elongation diagram and the vertical (force)
axis, as it is indicated in Fig 4.
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 10 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 ∆l
∆lk ∆l N
S
∆l =Sl/E/A N
Πint
Πint
Figure 4: The internal potential energy Πint and the complementary internal potential energyΠint in the case of a linearly elastic bar subjected to both force and kinematic loadings: the area
enclosed by the force-displacement diagram and the horizontal or vertical axis, respectively
2.3 The theorem
The total complementary potential energy is the sum of the internal and external comple-
mentary potentials:
Πtot =
Πint +
Πext. (17)
The theorem of stationarity of the complementary potential energy: among all the stat-ically admissible force systems of an elastic body the real one corresponds to a stationary
value of the total complementary potential energy. It is the necessary and sufficient condi-
tion of compatibility: it gives the statically admissible force system which is geometrically
admissible, too, i.e., the real one.
2.4 Application of the theorem
A structure is called statically indeterminate if the static equilibrium equations are insuffi-
cient for determining the internal forces and reactions. The degree of static indeterminacy is
the number m of (independent) unknown static parameters (reactions or internal forces) that
6

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 7/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
must be prescribed in addition to the use of equilibrium equations to completely describe the
static state of the structure. The structure is said to be statically determinate if the degree of
static indeterminacy is equal to zero. The structure is said to be statically indeterminate if thedegree of static indeterminacy is greater than zero.
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 01 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1
(a) (b)
(c)
Figure 5: Some statically indeterminate structures composed by rigid bodies, elastic bars, andsprings. The degree of static indeterminacy is (a) m = 1, (b) m = 2, and (c) m = 3.
The degree of static indeterminacy of some simple structures are shown in Fig. 5. In Fig. 5
(a) there can be seen a (plane) rigid body supported by a fixed hinge and two elastic bars. The
static unknowns are four, while there are only three independent equilibrium equations, thus
the structure is once indeterminate statically: m = 1. In Fig. 5 (b) a rigid body supported by
five elastic bars is shown, which is two times statically indeterminate: m = 2. Finally, Fig. 5
(c) shows a compound (Gerber) structure composed of 2 rigid bodies and a central hinge. This
structure is supported by six bars and one spring. These 7 static unknowns plus the 2×2 internal
force components at both sides of the hinge is 11, while there are only 3+3+2 = 8 independentequilibrium equations. Therefore, the structure shown in Figure 5 (c) is three times statically
indeterminate: m = 3. It means that if arbitrary values are set for three bar forces, for example,
then the other static unknowns (the rest of the bar forces, the spring force, and the forces in the
hinge) can be uniquely computed from the independent equilibrium equations.
For the sake of simplicity, we only deal with structures that are composed of some rigid
bodies connected to elastic springs and/or truss members. We denote the independent un-
known static parameters of the structure by S 1, S 2, . . . , S m. The total complementary po-
tential energy can always be written as a function of all the independent static parameters:
Πtot =
Πtot(S 1, S 2, . . . , S m).
The mathematical conditions for the multi-variable scalar function Πtot(S 1, S 2, . . . , S m) to
7

7/27/2019 Energy Th
http://slidepdf.com/reader/full/energy-th 8/8
Lecture notes on energy theorems BME Dept. of Structural Mechanics
be stationary is that all the partial derivatives of the function with respect to its variables must
be zero. Thus, the complementary potential energy is stationary if the following equations hold:
∂ Πtot(S 1, S 2, . . . , S m)
∂S 1= 0,
∂ Πtot(S 1, S 2, . . . , S m)
∂S 2= 0,
· · · · · ·
∂ Πtot(S 1, S 2, . . . , S m)
∂S m= 0.
(18)
The above expressions are equivalent to the compatibility equations of the structure. The real
force system can be obtained by solving Equations (18) for the static parameters S 1, S 2, . . . , S m,
and then using the equilibrium equations for the computation of the rest of the static unknowns.
Some examples are shown in the lecture.
8