Elastic Pendulum

of 9
Transcript of Elastic Pendulum
-
7/24/2019 Elastic Pendulum
1/9
INSTITUTE OFPHYSICSPUBLISHING EUROPEAN JOURNAL OFPHYSICS
Eur. J. Phys. 27 (2006) 205213 doi:10.1088/0143-0807/27/2/003
The Foucault pendulum with an ideal
elastic suspension string
A Stanovnik
Faculty of Electrical Engineering, University of Ljubljana and Joef Stefan Institute,Ljubljana, Slovenia
E-mail:[email protected]
Received 25 July 2005, in final form 21 November 2005
Published 3 January 2006Online atstacks.iop.org/EJP/27/205
Abstract
It is interesting and instructive to compare the precession of a Foucaultpendulum, which has an inextensible suspension string, to the precession of anideal elastic pendulum, for which the string force is proportional to string length(a harmonic oscillator). For the latter case, a simple derivation is presentedof the bob trajectories as seen by the local observer on the rotating earth. Itis shown that the initial precession rate is equal to the precession rate of theFoucault pendulum, andthat the precession period is equal to therotation periodof the earth. The different precession period of the Foucault pendulum maytherefore be seen as a cumulative effect of its inextensible suspension string,
which constrains the motion of the bob. It is also shown that the initial angularacceleration of the oscillation plane of the ideal elastic pendulum is opposite foropposite initial azimuth angles. If any such difference were observed for a realFoucault pendulum, it might indicate the presence of effects due to elasticity ofthe suspension string. Another interesting application of the present derivationwould be to the precession of the spring-mass oscillator.
1. Introduction
In 1851, Jean Bernard Leon Foucault demonstrated the precession of his pendulum, a 28 kg
cannon ball hanging by a 67 m wire from the top of the dome of the Pantheon in Paris, andthus provided the first non-astronomical proof of the rotation of the earth. Due to its historical,
cultural and pedagogical importance, many science museums and universities today have such
a pendulum. It is explained to students and museum visitors that the plane of oscillation
precesses (i.e. rotates) with a uniform precession rate p = sin, and a precession period
T = 1 day/sin , whereis the angular velocity of the earth and is the geographical latitude
of the pendulum site. The question, Why is the precession period not equal to the rotation
period of the earth? is, however, not so simply answered.
0143-0807/06/020205+09$30.00 c 2006 IOP Publishing Ltd Printed in the UK 205
http://dx.doi.org/10.1088/0143-0807/27/2/003mailto:[email protected]://stacks.iop.org/EJP/27/205http://stacks.iop.org/EJP/27/205mailto:[email protected]://dx.doi.org/10.1088/0143-0807/27/2/003 -
7/24/2019 Elastic Pendulum
2/9
206 A Stanovnik
The usual textbook derivation of the precession rate of a Foucault pendulum is appropriate
for an inextensible string and small amplitudes. The derivation approximates the string force
with the bob weight and restricts the bob motion to the horizontal plane by neglecting time
derivatives of the vertical coordinate [1]. This leads to a two-dimensional harmonic oscillator,
with the two horizontal degrees of freedom coupled by the inertial Coriolis force. The solutionof Newtons equation for the non-inertial local observer then results in the uniform precession
rate sin . As has been shown by a purely geometrical argument, this result is essentially due
to restriction of the bob motion to the horizontal plane [2]. If this restriction is removed, but the
string force approximation is kept, one obtains a three-dimensional harmonic oscillator, with
all three degrees of freedom coupled by the rotation of the earth. The present paper provides
a simple derivation of the bob trajectories for this case and shows that the oscillation plane
of such a pendulum-oscillator would precess with a rate initially equal to that of a Foucault
pendulum, but with a precession period equal to the rotation period of the earth.
All real pendulum strings are deformable at least to some small extent. The reasonable
assumption of elastic deformation in the region of stressstrain proportionality leads to
nonlinear differential equations. Indeed, the elastic pendulum is considered as a nonlinear
paradigm [3]. The elastic string force provides nonlinear coupling between horizontal andvertical oscillations, i.e. between pendulum and suspension modes. This is a difficult problem
[3], the more so if the additional coupling due to the rotation of the earth is included. However,
if the variation of string length during oscillation is much smaller than string dilatation due to
the bob weight, one could approximate the elastic string with an ideal elastic string, i.e. one
with force equal toFs = (mg/le)r, wheremgis the weight of the bob, le is the equilibrium
length of the string andr is the vector from suspension point to the bob. Such a string force
results in a three-dimensional harmonic oscillator, for which the solution on the rotating earth
is derived below.
An experimental demonstration of the precession period of a Foucault pendulum is also
not without problems. Damping of the oscillation amplitude, caused by air resistance, and the
onset of elliptical orbits, attributed to the asymmetry of pendulum suspension [4], complicate
a direct measurement of the full precession period of a free swinging pendulum (T 1 day).
Even the measurements of precession rate seem to be of limited accuracy [5].
The string force acting on the pendulum bob is discussed in the following section. The
derivation of the trajectories is presented in section3. The application of the solution to initial
conditions appropriate for a pendulum is described in section 4,and the final section contains
a discussion of the results.
2. The force of the string
Let us choose the origin of the coordinate system at the point of pendulum suspension, so
that r gives the location of the bob. For an elastic string, with dilatation in the region of
stressstrain proportionality, the string force may be written as
Fs = k(l l0)r
r, (1)
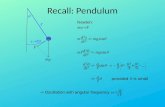
where k is the string elastic constant, l(t) = r(t) is its instantaneous length and l0 is its
unstressed length (figure1). The instantaneous length l may be written as
l = l0+ l+ l , (2)
wherelis the string dilatation due to the weight of the bob, andl is the additional variation
of string length during motion of the bob. The equilibrium length of the string is le = l0+ l.
-
7/24/2019 Elastic Pendulum
3/9
The Foucault pendulum with an ideal elastic suspension string 207
F
l
rigid
ideal
A
l e0
mg
elastic
B
l
Figure 1. The dependence of string force on string length for a hypothetical elastic string.
The inextensible string (labelled rigid) and ideal elastic string (labelled ideal) approximations are
indicated for equilibrium in theregion of stressstrain proportionality (point A).Equilibrium might
also be chosen on the nonlinear part of the elastic curve (point B).
The string force is thus
Fs = k l l0
l r = k
l+ l
le+ l r. (3)
If the variation of string length during oscillation is much smaller than the dilatation due to
the weight of the bob, i.e.l l, we then have
Fs = k l
le r =
mg
le r. (4)
By neglecting the variation l of stringlength duringoscillation, we have in effect approximated
the true elastic string with an ideal string (or spring): Fs = kr, wherek = mg/le(figure1).
In this case k/m = g/ le, i.e. the frequencies of horizontal (pendulum) and vertical
(suspension) oscillations would be equal and the nonlinear coupling of the elastic pendulum
would vanish [3].Finally, one may imagine an elastic pendulum with a string made of such material that
its nonlinear force-versus-length dependence F (l) allows a tangent of the form F = kl. If
equilibrium is chosen at the common point ofF (l)and the tangentkl(say point B in figure1),
then the string force in the vicinity of equilibrium should be well described by an ideal elastic
string, i.e. Fs = kr. In the present work, we shall assume such a pendulum suspension
string.
3. Derivation of the trajectories
By neglecting the tidal gravitational forces of external bodies (sun, moon, galaxy, etc), we
obtain an approximately inertial reference frameS, with origin at the centre of the earth, the z
axis coincident with earths rotation axis and with the xandy axes fixed relative to the distantstars. Now consider a systemS, with origin fixed at a point on the surface of the rotating earth,
and with axes remaining parallel to the axes of the inertial system S. We refer to the system
S as our circulating, but not rotating system. The relation between accelerations a and a of
a particle measured by observers in the two systems Sand S, is given bya = a0+ a, where
a0 is the acceleration of the origin ofS, as measured by the inertial observer in S. Newtons
law for the inertial observer,F = ma, whereF is the sum of all real forces,m is the particle
mass anda is its acceleration in S, thus becomes Newtons law for the non-inertial observer
-
7/24/2019 Elastic Pendulum
4/9
208 A Stanovnik
S,F ma0 = ma. The inertial forceFin = ma0 depends only on the acceleration of the
origin ofS, and not on the exact location of the particle.
Let the origin ofS be at the pendulum suspension point. In this case the string force is
Fs = kr (see the previous section), where r is the location of the pendulum bob. The other
real forces are the force of gravity, Fg = mg0, and the force of air resistance, which shall beneglected in the present derivation. In our circulating, but not rotating, non-inertial system S,
one has to consider also the inertial force Fin = ma0. Newtons law gives
kr +mg0 ma0 = mr. (5)
After rearranging the terms and labelling 20 = k/m, we obtain
r +20r = g0 a0. (6)
In the system S, the vectors g0 and a0 rotate. Assuming a spherical earth and the initial
position of the origin ofS to be aty = 0, x 0 in S, we have:
g0 = g0(cos cost, cos sin t, sin ), (7)
a0 = 2R(cos cost, cos sin t, 0), (8)
whereis the geocentric latitude,Ris the radius andis the angular velocity of the earth. We
see that our system S is equivalent to an inertial system, with a circulating centre of effective
gravity; gef = g0 a0. This effective gravity defines the local vertical direction. The angle
ofgefwith respect to the equatorial plane is given by the sine theorem
sin( )
sin =
2Rcos
g0. (9)
InS the effective gravity is:
gef = gef(cos cost, cos sint, sin ), (10)
wheregef = |g0 a0|.
The equations for the coordinates of the bob are the equations of a forced harmonic
oscillator:
x +20x = gefcos
cost, (11a)
y +20y = gefcos
sin t, (11b)
z +20z = gefsin
. (11c)
Let us recall that the dots stand for time derivatives, while the primes on x , y andz denote
the coordinates of the pendulum bob in our circulating, but not rotating reference frame S.
The general solution of these linear differential equations is a sum of the general solution
of the homogeneous equation and a particular solution of the inhomogeneous equation. It may
be written in the vector form
r(t) = A cos0t+ B sin 0t+ C(t), (12)
where A and B are constant vectors to be determined by initial conditions and C(t) is the
vector of particular solutions:
C(t) = gef
cos cost
20 2 ,
cos sin t
20 2 ,
sin
20
. (13)
This vector describes the slowly circulating ( 0) centre of the pendulum bob orbit.
However, the orientation of the orbit, given by the constant vectors A and B , stays constant
in the reference frame S.
-
7/24/2019 Elastic Pendulum
5/9
The Foucault pendulum with an ideal elastic suspension string 209
We now transform this solution into the rotating frame S, with the x axis pointing
southward, they axis pointing eastward and the z axis pointing upward. Upward is defined
by the direction opposite to that of effective gravity, given by . The transformation is
composed of a rotation around the z axis fortand a rotation around they axis for 2
.
The transformation matrix is quickly found to be
R(t) =
sin
cost sin sin t cos
sin t cost 0
cos cost cos sint sin
. (14)
By transforming the solution (12) intoS we obtain:
r(t) = R(t)r(t) = A(t) cos0t+ B(t) sin 0t+ C
, (15)
where
A(t) = R(t)A, B(t) = R(t)B, C = R(t)C(t). (16)
The centreC of the orbit in S is now independent of time:
C = gefsin cos
20 2
sin cos
20, 0,
cos2
20 2 +
sin2
20
. (17)
The fact that the equilibrium position of the bob, given by C, is not exactly on the vertical
axis may be understood by the centrifugal force being weaker at the bob position than at the
origin ofS, where the vertical axis is defined. For20 2 and20 = gef/le this vector
reduces to C = (0, 0, le). From the initial positionr(0) and velocity v(0) in S one
obtains:
A = R(0)1[r(0) C], B =1
0R(0)1[v(0) R(0)A], (18)
where
R(0)1 =
sin 0 cos
0 1 0
cos 0 sin
(19)
and
R(0) =
0 sin
0
1 0 0
0 cos 0
. (20)
Forr (0) = (x0, y0, z0), v(0) = (vx0, vy0, vz0)andC
= (0, 0, le)we have:
A1 = x0sin +z0cos
+lecos , (21a)
A2 = y0, (21b)
A3 = x0cos +z0sin
+lesin , (21c)
and
B1 =vx0
0sin +
vz0
0cos
0 A2, (22a)
B2 =vy0
0+
0 A1, (22b)
B3 = vx0
0cos +
vz0
0sin . (22c)
-
7/24/2019 Elastic Pendulum
6/9
210 A Stanovnik
We see that because R(t)is a length conserving rotation:
A(t) B(t) = A B =1
0[r(0) C] v(0). (23)
So, if the initial displacement and initial velocity are orthogonal vectors, the orbit of thependulum bob will be an ellipse. The semi-axesA(t) and B(t) will be slowly changing
their orientation in space, while the centre of the ellipse stays fixed at C.
The above derivation is also valid for a spheroidal earth with andgefsuitably modified.
Air resistance in the form of Stokes law may be included with minor modifications. It may be
worth noting that the method has been applied to the derivation of local projectile trajectories
and free fall.
4. Pendulum precession
A pendulum bob is usually started with the following initial condition:
r(0) = le(sin 0cos 0, sin 0sin 0, cos 0), (24a)
v(0) = (0, 0, 0), (24b)
where0is the initial angle of the pendulum string with respect to the z axis,0is the initial
angle of the oscillation plane with respect to thex z plane (azimuth) andleis the equilibrium
length of the elastic string.
The solution in the local non-inertial reference frame S is
r(t) = A(t) cos0t+ B(t) sin 0t+ C
. (25)
By inserting (24) into(21)and (22) and with the transformation (14), we obtain in the limit of
small amplitudes(0 1):
A1(t) = le0(cos0sin2 cos t+ sin 0sin
sin t+ cos 0cos2 ), (26a)
A2(t) = le0(sin 0cos t cos0sin sin t), (26b)
A3(t) = le0(cos0sin cos cos t+ sin 0cos
sin t cos0cos sin) (26c)
and
B1 (t) =
0le0(cos 0sin
2 sint sin0sin cos t), (27a)
B2 (t) =
0le0(sin 0sin t+ cos 0sin
cos t), (27b)
B3 (t) =
0le0(cos 0sin
cos sint sin0cos cost), (27c)
with C = (0, 0, le). We see that the usual initial condition for a Foucault pendulumnecessarily leads to an elliptical orbit of thebob. Theminor semi-axisof theellipse corresponds
to a small initial velocity given byle0, where is earths angular velocity and le0is the initial
horizontal displacement from equilibrium. For a normal Foucault pendulum,/0 104, so
the minor semi-axis B would be about four orders of magnitude smaller than the major semi-
axisA of the elliptical orbit. By starting the pendulum from equilibrium r(0) = (0, 0, le),
both A and A would be equal to zero, so the pendulum bob motion would be described
by r(t) = B(t) sin 0t+ C. It may be easily verified that forr(0) = (0, 0, le) and
-
7/24/2019 Elastic Pendulum
7/9
The Foucault pendulum with an ideal elastic suspension string 211
1 2 3 4 t h
-6
-4
-2
2
4
6
8
10
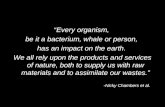
Figure 2. Thedifference in precession angle between an ideal elastic pendulum and an inextensible
string Foucault pendulum as a function of precession time. The curves correspond to = 46.05
and to different initial azimuth angles: 0 = 45 (dotted curve), 0 = 0 (full curve), 0 = 45
(broken curve) and0 = 90 (chain curve).
v(0) = (v0cos 0, v0sin 0, 0), the time dependence ofB would be equal to that of the
major semi-axisA (26)for the usual initial condition (24).
The amplitudes are periodic functions, with period equal to the period of rotation of the
earth, i.e. 24 h. This result follows already from the observation that the orientation of the
pendulum bob orbit inS is fixed, and that the transformation between S andS is a rotation
with a 24 h period.
Let us define the oscillation plane by the major semi-axisA(t)and the vertical axisz.
The azimuth angle of the oscillation plane with respect to the x z plane is then given by
tan (t) =A2(t)
A1(t)=
sin0cos t cos0sin sint
cos0sin2 cost+ sin 0sin sint+ cos 0cos2 . (28)
For short times after the release of the pendulum (t 1), we obtain from (28):
ddt
= p sin sin 20cos2 t2. (29)
The initial precession rate p(t = 0) is equal to sin, regardless of0. However, later on,
the precession rate starts changing, with the variation depending on initial azimuth angle and
latitude. The changes are greatest for0 = 45, accelerating in one case and decelerating in
the other. At the latitude of Ljubljana ( = 46 3), this prediction would produce an 8 mrad
largeror smaller precession angle after onehour of swinging ( sin t 185mrad) (figure 2).
The acceleration or deceleration of precession may be understood by the variation of the
Coriolis force due to excursions of the bob amplitude and velocity vectors out of the horizontal
plane. The excursion out of the horizontal plane in turn is due to the vertical component of the
Coriolis force, i.e. to coupling of horizontal and vertical oscillations caused by the rotation of
the earth.
At the poles = 90 and we obtain from (26) and (27),
A(t) = le(cos(0 t), sin(0 t), 0), (30a)
B(t) =
0le0(sin(0 t), cos(0 t),0). (30b)
The azimuth angle of the oscillation plane is given by tan (t) = tan(0 t). The pendulum
bob has no vertical motion and the oscillation plane precesses as expected for a Foucault
pendulump = .
-
7/24/2019 Elastic Pendulum
8/9
212 A Stanovnik
At the equator = 0 and the solution is
A(t) = le0(cos0, sin0cos t, sin 0sin t), (31a)
B
(t) =
0 le0(0, sin 0sin t, sin0cos t). (31b)
For initial displacements towards the south 0 = 0, we get no precession. For other initial
azimuth angles0, the major semi-axis A(t)would precess on a cone with its symmetry axis
directed southward (x axis) and with apex angle 20. Especially interesting is the observation
that according to (29) for = 0, the initial precession would be in an opposite direction for
positive or negative initial azimuth(0)angles.
5. Discussion
The point that we would like to stress in the present paper is the influence of elastic properties
of pendulum suspension strings on pendulum bob trajectories and especially on the result for
the precession period. Initially, the precession of the ideal elastic pendulum is equal to thatof a Foucault pendulum and the differences only build up with time. The final result is a
substantial difference in precession periods.
The ideal elastic string, with string force proportional to string length, is expected to
well describe real pendulum bob motion in the limit, when variations in string length during
oscillation are negligible compared to string dilatation due to the weight of the bob. As
the variation in string length in this case could be as large as the oscillation amplitude, this
approximation should be valid for amplitudes much smaller than string dilatation due to the
bob weight. The motion of the bob is then described by a 3D harmonic oscillator with the three
degrees of freedom coupled by the rotation of the earth. Just like a gyroscope, the oscillation
amplitude vector maintains a fixed direction in inertial space, so its orientation relative to the
local observer is given by the transformation, i.e. the rotation of coordinate systems. This
transformation is periodic with a one-day period, so the precession period should be one day.
From the point of view of the non-inertial local observer, the relatively complicated motion
of the oscillation amplitude vector could be understood as the action of the inertial Coriolis
force.
The inextensible string approximation is the approximation of the usual textbook
derivation of the precession rate of the Foucault pendulum. Such a string should stretch
negligibly under the weight of the bob, or at least this dilatation should be much smaller
than the oscillation amplitude. The oscillation amplitude in turn should be sufficiently small,
so that the pendulum bob motion is approximately two dimensional, i.e. it is restricted to
the local horizontal plane. It is the properties of the inextensible string that force the bob
to stay approximately in the local horizontal plane. Consequently, the oscillation amplitude
does not keep a fixed orientation in inertial space, so in general it should not be expected
to have a 24 h precession period. An infinitesimal rotation of the earth, represented by the
angular velocity vector, may be decomposed into a vertical component v = sin anda horizontal component h = cos . Due to the restriction of the bob motion to the
horizontal plane, the amplitude vector will follow the rotation around the horizontal axis, so
no effect of the horizontal rotation will be seen by the local observer. On the other hand,
the vertical component of rotation does not change the orientation of the amplitude vector in
inertial space, so it appears to the local observer as a counter rotation of the oscillation plane
with a precession rate equal to sin . The answer to the question of the inquisitive museum
visitor, mentioned in the introduction to this paper, would therefore be that the precession
-
7/24/2019 Elastic Pendulum
9/9
The Foucault pendulum with an ideal elastic suspension string 213
period of a pendulum is not only a matter of the rotation of the earth, but depends also on the
elastic properties of the pendulum suspension string. In particular, the result for the Foucault
pendulum is a consequence of the inextensible string, which, for small amplitudes, restricts
the bob motion approximately to the local horizontal plane.
It seems that an indicative parameter for pendulum precession would be the ratio of theoscillation amplitude (A) to the string dilatation (l) due to the weight of the bob. For
A/l 1 the precession period is 1 day/ sin ; forA/l 1 it is 1 day. Both cases are
approximations, so for a real pendulum one may have to take into account the true elastic
properties of the suspension string, i.e. solve the appropriate nonlinear differential equations.
It has probably not escaped the readers attention that the initial precession rate of the ideal
elastic pendulum is equal to that of the inextensible string pendulum, providing that the elastic
pendulum has been started with initial conditions appropriate for a pendulum. Differences
develop only after some hours of oscillation, but they are small and would probably be difficult
to measure due to damping and to the onset of elliptical orbits of real pendulums. However, the
ideal elastic pendulum is predicted to accelerate or decelerate for positive or negative initial
azimuth angles respectively (29). Any such difference observed for real pendulums could
therefore be suspected to indicate the effects of suspension string elasticity.Finally let us mention that instead of a bob on a string (i.e. elastic pendulum), one may
consider a mass on a spring, which in three dimensions is also a nonlinear problem [6]. Again,
in the limit of small amplitudes, one may neglect the nonlinear term and obtain a 3D harmonic
oscillator with the three degrees of freedom coupled by the rotation of the earth. From the
solution derived in the present paper one may easily obtain the 3D trajectories of the mass just
by inserting the appropriate initial conditions.
Acknowledgment
The author is indebted to Dr Andrej Goriek for making the graphs in this paper.
References
[1] Marion J B 1970Classical Dynamics (New York: Harcourt Brace Jovanovich) p 353[2] Oprea J 1995 Geometry and the Foucault pendulumAm. Math. Mon. 102 51522[3] Breitenberger E and Mueller R D 1981 The elastic pendulum: a nonlinear paradigmJ. Math. Phys. 22 1196210[4] Schulz-DuBois E O 1970 Foucault pendulum experiment by Kammerlingh Onnes and degenerate perturbation
theoryAm. J. Phys. 38 17388[5] Stong C L 1958 The amateur scientistSci. Am.June 11529
Stong C L 1964 The amateur scientist Sci. Am.February 13639[6] Cayton T E 1977 The laboratory spring-mass oscillator: an example of parametric instability Am. J.
Phys. 45 72332
http://dx.doi.org/10.1063/1.525030http://dx.doi.org/10.1063/1.525030http://dx.doi.org/10.1119/1.1976270http://dx.doi.org/10.1119/1.1976270http://dx.doi.org/10.1119/1.11035http://dx.doi.org/10.1119/1.11035http://dx.doi.org/10.1119/1.11035http://dx.doi.org/10.1119/1.1976270http://dx.doi.org/10.1063/1.525030