EE123 Digital Signal Processing •Today
8
M. Lustig, EECS UC Berkeley EE123 Digital Signal Processing Lecture 2 1 M. Lustig, EECS UC Berkeley Today • Last time: – Administration – Overview • Today: – Another demo – Ch. 2 - Discrete-Time Signals and Systems 2 M. Lustig, EECS UC Berkeley Discrete Time Signals • Samples of a CT signal: • Or, inherently discrete (Examples?) x[n]= X a (nT ) n =1, 2, ··· X a (t) x[0] x[1] x[2] t T 2T 3T 3 • Unit Impulse • Unit Step M. Lustig, EECS UC Berkeley Basic Sequences δ [n]= ⇢ 1 n =0 0 n 6=0 U [n]= ⇢ 1 n ≥ 0 0 n< 0 n ··· n ··· 4
Transcript of EE123 Digital Signal Processing •Today

M. Lustig, EECS UC Berkeley
EE123Digital Signal Processing
Lecture 2
1
M. Lustig, EECS UC Berkeley
Today
• Last time:– Administration– Overview
• Today:– Another demo– Ch. 2 - Discrete-Time Signals and Systems
2
M. Lustig, EECS UC Berkeley
Discrete Time Signals
• Samples of a CT signal:
• Or, inherently discrete (Examples?)
x[n] = Xa(nT ) n = 1, 2, · · ·
Xa(t)x[0]x[1]
x[2]
tT 2T 3T
3
• Unit Impulse
• Unit Step
M. Lustig, EECS UC Berkeley
Basic Sequences
�[n] =
⇢1 n = 00 n 6= 0
U [n] =
⇢1 n � 00 n < 0
n
· · ·
n
· · ·
4

0 < ↵ < 1 ↵ > 1
↵ < �1�1 < ↵ < 0
M. Lustig, EECS UC Berkeley
Basic Sequences
• Exponentialx[n] =
⇢A↵
nn � 0
0 n < 0
n
· · ·
n
· · ·
n
· · ·n
· · ·
Bounded unBounded
5
x[n+N ] = x[n] for N integer
x[n] = A cos(!0n+ �)
x[n] = Ae
j!0n+j�
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
Q: Periodic or not?
or,
6
x[n+N ] = x[n] for N integer
x[n] = A cos(!0n+ �)
x[n] = Ae
j!0n+j�
!0N = 2⇡KM. Lustig, EECS UC Berkeley
Discrete Sinusoids
• To find fundamental period N– Find smallest integers K,N :
Q: Periodic or not?
A: If is rational (Different than C.T.!)!0/⇡
or,
7
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
• Example:
cos(5/7⇡n) N = 14 (K = 5)
cos(⇡/5n) N = 10 (K = 1)
cos(5/7⇡n) + cos(⇡/5n) ) N = S.C.M{10, 14} = 70
8

!0 = ⇡ !0 =3⇡
2
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
• Another Difference:
Q: Which one is a higher frequency?
or
9
!0 = ⇡ !0 =3⇡
2
cos(⇡n) cos(3⇡/2n) = cos(⇡/2n)
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
• Another Difference:
Q: Which one is a higher frequency?
or
n
· · ·· · ·n
· · ·· · ·
10
!0 = ⇡ !0 =3⇡
2
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
• Another Difference:
Q: Which one is a higher frequency?
or
A: !0 = ⇡
N = 2
n
· · ·· · ·
N = 4
n
· · ·· · ·
11
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
• Recall the periodicity of DTFTr -
L {.A/£ Afl: £1.tfOs1'1f o.A/
T[XsthJ-r jJtlrJjDJ ha."9ern{1 !
o.T{tLnJ]
12

M. Lustig, EECS UC Berkeley
Discrete Sinusoids
!0 = 0
!0 = ⇡/8
!0 = ⇡/4
!0 = ⇡
cos(w0n)
13
cos(w0n)
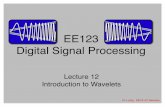
M. Lustig, EECS UC Berkeley
Discrete Sinusoids
!0 = ⇡
!0 =7
4⇡
!0 =15
8⇡
!0 = 2⇡
14
x[n] y[n]T{·}
M. Lustig, EECS UC Berkeley
Discrete Time Systems
What properties?
• Causality:– y[n0] depends only on x[n] for ∞≤n≤n0
15
T{ax1[n]} = aT{x[n]} = ay[n]
M. Lustig, EECS UC Berkeley
Properties of D.T. Systems Cont.
• Memoryless:– y[n] depends only on x[n]
• Linearity:– Superposition:
– Homogeneity:
Example: y[n] = x[n]2
T{x1[n] + x2[n]} = T{x1[n]}+ T{x2[n]} = y1[n] + y2[n]
16

M. Lustig, EECS UC Berkeley
Properties of D.T. Systems Cont.
• Time Invariance:– If:Then:
• BIBO Stability– If:Then:
y[n] = T{x[n]}y[n� n0] = T{x[n� n0]}
|x[n]| B
x
< 1 8 n
|y[n]| B
y
< 1 8 n
17
y[n] = x[n� nd]
y[n] = x[Mn]
M > 1
M. Lustig, EECS UC Berkeley
Time Shift
Accumulator
Compressor
Causal L TI memorylessBIBOstable
if nd>=0 Y Y if nd=0 Y
Y Y Y N N
N Y N N Y
Example:
y[n] =nX
k=�1x[k]
18
y[n]
x[n� 1]
M. Lustig, EECS UC Berkeley
Examples
Why the compressor is NOT Time Invariant?
n
· · ·· · ·
Suppose M=2,
n
· · ·· · ·
x[n] = cos[⇡/2 n]
n
· · ·· · ·
6= y[n� 1]n
· · ·· · ·
19
y[n] = MED{x[n� k], · · · , x[n+ k]}
M. Lustig, EECS UC Berkeley
Examples
Non-Linear system: Median Filter * j0 cl] /MIL A_ NtJ»-l.f).)fN?_ S'(<;r£M.! .Mf/2!/VI ffLTF-f(
=- m£o [ r[JJ-k.'], ... 1 :X{n+-tJ1
•
, 1 '}CxJ - 0 Q 6 J :>
-i - -1
s • ?- e ee t ft, }'lhl
-----
20

M. Lustig, EECS UC Berkeley
Example: Removing Shot Noise
• From NPR This American Life, ep.203“The Greatest Phone Message in the World”
em.. (giggle) There comes a time in life, when .. eh... when we hear the greatest phone mail message of all times and .... well here it is... eh.. you have to hear it to believe it..
corrupted message
21
M. Lustig, EECS UC Berkeley
Spectrum of Speech
Speech
Corrupted Speech
22
M. Lustig, EECS UC Berkeley
Low Pass Filtering
LP-Filter Spectrum
23
Corrupted
M. Lustig, EECS UC Berkeley
Low-Pass Filtering of Shot Noise
LP-filtered
24

Med-filter
Corrupted
M. Lustig, EECS UC Berkeley
Low-Pass Filtering of Shot Noise
25
M. Lustig, EECS UC Berkeley
The Greatest Message of All Times...
• I thought you’ll get a kick out of a message from my mother......Hi Fred, you and the little mermaid can go blip yourself. I told you to stay near the phone... I can’t find those books.. you have other books here.. it must be in Le’hoya.. call me back... I’m not going to stay up all night for you... .... Bye Bye...
26
�[n] h[n]
y[n] = h[n] ⇤ x[n]
y[n] =1X
N=�1h[m]x[n�m]
LTI
M. Lustig, EECS UC Berkeley
Discrete-Time LTI Systems
• The impulse response h[n] completely characterizes an LTI system “DNA of LTI”
x[n]
discrete convolutionLTI
Sum of weighted, delayed impulse responses!
27
M. Lustig, EECS UC Berkeley
BIBO Stability of LTI Systems
• An LTI system is BIBO stable iff h[n] is absolutely summable
1X
k=�1|h[k]| < 1
28

Bx
1X
k=�1|h[k]| < 1
M. Lustig, EECS UC Berkeley
BIBO Stability of LTI Systems
• Proof: “if”
|y[n]| =
�����
1X
k=�1h[k]x[n� k]
�����
1X
k=�1|h[k]| · |x[n� k]|
Bx
29
M. Lustig, EECS UC Berkeley
BIBO Stability of LTI Systems
• Proof: “only if”– supposeshow that there exists bounded x[n] that gives unbounded y[n]
– Let:
P1k=�1 |h[k]| = 1
30