ECEN 667 Power System Stability3uuiu72ylc223k434e36j5hc-wpengine.netdna-ssl.com/wp...ECEN 667 Power...
40
ECEN 667 Power System Stability 1 Lecture 8: Synchronous Machine Models Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M University, [email protected]
Transcript of ECEN 667 Power System Stability3uuiu72ylc223k434e36j5hc-wpengine.netdna-ssl.com/wp...ECEN 667 Power...

ECEN 667
Power System Stability
1
Lecture 8: Synchronous Machine Models
Prof. Tom Overbye
Dept. of Electrical and Computer Engineering
Texas A&M University, [email protected]

Announcements
• Read Chapter 5 and Appendix A
• Homework 2 is due today
• Homework 3 is posted, due on Thursday Oct 5
2

Synchronous Machine Stator
Image Source: Glover/Overbye/Sarma Book, Sixth Edition, Beginning of Chapter 8 Photo 3

Synchronous Machine Rotors
• Rotors are essentially electromagnets
Image Source: Dr. Gleb Tcheslavski, ee.lamar.edu/gleb/teaching.htm
Two pole (P)
round rotor
Six pole salient
rotor
4

Synchronous Machine Rotor
Image Source: Dr. Gleb Tcheslavski, ee.lamar.edu/gleb/teaching.htm
High pole
salient
rotor
Shaft
Part of exciter,
which is used
to control the
field current
5

Synchronous Generators
Image Source: Glover/Overbye/Sarma Book, Sixth Edition, Beginning of Chapter 11 Photo 6

11 1 1
11 1 1
22 2 2
fdfd fd fd
dd d d
qq q q
qq q q
dv i r
dt
dv i r
dt
dv i r
dt
dv i r
dt
Kirchhoff’s Voltage Law, Ohm’s Law, Faraday’s
Law, Newton’s Second Law
aa a s
bb b s
cc c s
dv i r
dt
dv i r
dt
dv i r
dt
shaft 2
2m e f
d
dt P
dJ T T T
P dt
Stator Rotor Shaft
7
Fundamental Laws

11 1 1
11 1 1
22 2 2
fdfd fd fd
dd d d
qq q q
qq q q
dv r i
dt
dv r i
dt
dv r i
dt
dv r i
dt
2
2
shaft
m e f
d
dt P
dJ T T T
P dt
dd s d q
qq s q d
oo s o
dv r i
dt
dv r i
dt
dv r i
dt
Stator Rotor Shaft
8
Transformed System

11 1 1
fdfd fd fd
dd d d
dr i v
dt
dr i v
dt
2shaft s
Pt
ds d q d
qs q d q
os o o
dr i v
dt
dr i v
dt
dr i v
dt
11 1 1
22 2 2
qq q q
qq q q
dr i v
dt
dr i v
dt
2 3
2 2
s
m d q q d f
d
dt
d PJ T i i T
p dt
Define Unscaled Variables
s is the rated
synchronous speed
plays an important role!
9

1
1
1
ds d q d
s s
qs q d q
s s
os o o
s
dR I V
dt
dR I V
dt
dR I V
dt
11 1 1
1
1
fdfd fd fd
s
dd d d
s
dR I V
dt
dR I V
dt
11 1 1
22 2
1
12
qq q q
s
qq q
s
dR I V
dt
dR I V
dt
2
s
M d q q d FWs
d
dt
H dT I I T
dt
Synchronous Machine Equations
in Per Unit
10
Units of H are
seconds

3
2cos2
3
2cos2
cos2
3
2cos2
3
2cos2
cos2
isssc
isssb
isssa
vsssc
vsssb
vsssa
tII
tII
tII
tVV
tVV
tVV
Sinusoidal Steady-State
11
Here we consider the
application
to balanced, sinusoidal
conditions

issq
issd
vssq
vssd
II
II
VV
VV
cos
sin
cos
sin
/ 2
/ 2
jj vsV jV e V ed q s
jj isI jI e I ed q s
2shaft s
Pt
Simplifying Using
• Recall that
• Hence
• These algebraic equations can be written as
complex equations,
12
The conclusion is
if we know , then
we can easily relate
the phase to the dq
values!

Summary So Far
• The model as developed so far has been derived using
the following assumptions
– The stator has three coils in a balanced configuration, spaced
120 electrical degrees apart
– Rotor has four coils in a balanced configuration located 90
electrical degrees apart
– Relationship between the flux linkages and currents must
reflect a conservative coupling field
– The relationships between the flux linkages and currents must
be independent of shaft when expressed in the dq0 coordinate
system
13

Assuming a Linear Magnetic Circuit
• If the flux linkages are assumed to be a linear function
of the currents then we can write
14
1 1
1 1
2 2
a a
b bss shaft sr shaft
c c
fd fd
d d
rs shaft rr shaftq q
q q
i
iL L
i
i
iL L
i
i
The rotor
self-
inductance
matrix
Lrr is
independent
of shaft

1
1 11
1 1
2 2
d d
q q
o odqo srdqo ss dqo
fd fd
d d
rrrs dqoq q
q q
i
i
iT LT L Ti
iLL T
i
i
15
Conversion to dq0 for Angle
Independence

1 1
1 1
1 1 1 1 1 1
3
2
3
2
d s md d sfd fd s d d
fd sfd d fdfd fd fd d d
d s d d fd d fd d d d
L L i L i L i
L i L i L i
L i L i L i
1 1 2 2
1 1 1 1 1 1 2 2
2 2 1 2 1 2 2 2
3
2
3
2
q s mq q s q q s q q
q s q q q q q q q q
q s q q q q q q q q
L L i L i L i
L i L i L i
L i L i L i
o s oL i
Conversion to dq0 for Angle
Independence
16
,md A B
mq A B
3L L L
2
3L L L
2
For a round rotor
machine LB is small
and hence Lmd is
close to Lmq. For a
salient pole machine
Lmd is substantially
larger

Convert to Normalized at f = s
• Convert to per unit, and assume frequency of s
• Then define new per unit reactance variables
17
, ,
, ,
, ,
,
,
s mqs s s mds md mq
BDQ BDQ BDQ
s fdfd s fd1d sfds 1d1dfd 1d fd1d
BFD B1D BFD s1d
s 1q1q s 2q2q s 1q2q s1q
1q 2q 1q2q
B1Q B2Q B1Q s2q
fd fd md 1d 1d md
1q 1q mq 2q 2
LL LX X X
Z Z Z
L L LLX X X
Z Z Z L
L L L LX X X
Z Z Z L
X X X X X X
X X X X X
,
q mq
d s md q s mq
X
X X X X X X

Key Simulation Parameters
• The key parameters that occur in most models can then
be defined the following transient values
18
2
2
1
1
1
1
1
1 1
1
1 1
,
mdd s d
fd
md fd
mqq s q
q
mq q
qdo qo
s fd s q
XX X X
X
X X
XX X X
X
X X
XXfdT T
R R
These values
will be used in
all the
synchronous
machine models
In a salient rotor machine
Xmq is small so Xq = X'q;
also X1q is small so
T'q0 is small

Key Simulation Parameters
• And the subtransient parameters
19
1
1 2
1 21 2
1 1
1
1 1 1
1
1 1 1
1 1 1 1,
1 1 1 1
d s
md fd d
q s
mq q q
do d qo qs d s q
md d mq q
X X
X X X
X X
X X X
T X T XR R
X X X X
These values
will be used in the
subtransient machine
models. It is common
to assume X"d = X"q

Example Xd/Xq Ratios for a
WECC Case
20

Example X'q/Xq Ratios for a
WECC Case
21About 75% are Clearly Salient Pole Machines!

11
XmdE
q fdXfd
Xmq
Ed qX
q
XmdE V
fd fdRfd
Internal Variables
• Define the following variables, which are quite
important in subsequent models
Hence E'q and E'd are
scaled flux linkages
and Efd is the scaled
field voltage
22

Dynamic Model Development
• In developing the dynamic model not all of the currents
and fluxes are independent
– In the book formulation only seven out of fourteen are
independent
• Approach is to eliminate the rotor currents, retaining the
terminal currents (Id, Iq, I0) for matching the network
boundary conditions
23

1
1
1 12
1
d s d dd d d q d
d s d s
fd q d d d dmd
d dd d d s d q
d s
X X X XX I E
X X X X
I E X X I IX
X XI X X I E
X X
Rotor Currents
• Use new variables to solve for the rotor currents
24

2
1 2
2 22
1
q s q q
q q q d q
q s q s
q d q q q qmq
q qq q q s q d
q s
o s o
X X X XX I E
X X X X
I E X X I IX
X XI X X I E
X X
X I
Rotor Currents
25

1
1
1
ds d q d
s s
qs q d q
s s
os o
s
dR I V
dt
dR I V
dt
dR I Vo
dt
12
q d ddo q d d d d d s d q fd
d s
dE X XT E X X I X X I E E
dt X X
22
q qdqo d q q q q q s q d
q s
X XdET E X X I X X I E
dt X X
Final Complete Model
26
These first three equations
define what are known
as the stator transients; we
will shortly approximate
them as algebraic constraints

11
22
2
ddo d q d s d
qqo q d q s q
s
M d q q d FWs
dT E X X I
dt
dT E X X I
dt
d
dt
H dT I I T
dt
Final Complete Model
27
TFW is the friction
and windage
component that
we'll consider
later

1
2
d s d sd d d q d
d s d s
q s q q
q q q d q
q s q s
o s o
X X X XX I E
X X X X
X X X XX I E
X X X X
X I
Final Complete Model
28

s
1
0
0
0
0
0
s d q d
s q d q
s o o
q d d d fd
d q d s d
R I V
R I V
R I V
E X X I E
E X X I
Single-Machine Steady-State
2
0
0
0
0
d q q q
q d q s q
s
m d q q d FW
E X X I
E X X I
T I I T
d q d d
q q q d
o s o
E X I
X I E
X I
29
The key variable
we need to
determine the
initial conditions
is actually , which
doesn't appear
explicitly in these
equations!

Field Current
• The field current, Ifd, is defined in steady-state as
• However, what is usually used in transient stability
simulations for the field current is
• So the value of Xmd is not needed
30
/fd fd mdI E X
fd mdI X

Single-Machine Steady-State
• Previous derivation was done assuming a linear
magnetic circuit
• We'll consider the nonlinear magnetic circuit (section
3.5) but will first do the steady-state condition (3.6)
• In steady-state the speed is constant (equal to s), is
constant, and all the derivatives are zero
• Initial values are determined from the terminal
conditions: voltage magnitude, voltage angle, real and
reactive power injection
31

s
1
0
0
0
0
0
s d q d
s q d q
s o o
q d d d fd
d q d s d
R I V
R I V
R I V
E X X I E
E X X I
Single-Machine Steady-State
2
0
0
0
0
d q q q
q d q s q
s
m d q q d FW
E X X I
E X X I
T I I T
d q d d
q q q d
o s o
E X I
X I E
X I
32
The key variable
we need to
determine the
initial conditions
is actually , which
doesn't appear
explicitly in these
equations!

Determining without Saturation
• Recalling the relation between and the stator values
• We then combine the equations for Vd and Vq and get
33
( /2)
( /2)
j j sd q s
j j sd q s
V jV e V e
I jI e I e
( /2) ( /2)
( /2)
where
j jd q s q d q
jq d d q
V jV e R jX I jI e E
E j X X I E e

d s d d q q
q s q q d d
V R I E X I
V R I E X I
Determining without Saturation
• In order to get the initial values for the variables we
need to determine
• We'll eventually consider two approaches: the simple
one when there is no saturation, and then later a general
approach for models with saturation
• To derive the simple approach we have
34

Determining without Saturation
35
( )as s q asE V R jX I
The angle on E
/2Since
j
jq d d q
j e
E X X I E e
• Then in terms of the terminal values

D-q Reference Frame
• Machine voltage and current are “transformed” into
the d-q reference frame using the rotor angle,
• Terminal voltage in network (power flow) reference
frame are VS = Vt = Vr +jVi
sin cos
cos sin
dr
qi
VV
VV
sin cos
cos sin
d r
q i
V V
V V
36

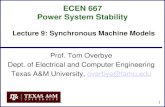
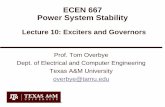
A Steady-State Example (11.10)
• Assume a generator is supplying 1.0 pu real power at
0.95 pf lagging into an infinite bus at 1.0 pu voltage
through the below network. Generator pu values are
Rs=0, Xd=2.1, Xq=2.0, X'd=0.3, X'q=0.5
37
Infinite Bus
slack
X12 = 0.20
X13 = 0.10 X23 = 0.20
XTR = 0.10
Transient Stability Data Not Transferred
Bus 1 Bus 2
Bus 3
Angle = 0.00 DegAngle = 6.59 Deg
Bus 4
Delta (Deg): 52.08
P: 100.00 MW
Speed (Hz): 60.00
Eqp: 1.130
1.095 pu
Edp: 0.533

A Steady-State Example, cont.
• First determine the current out of the generator from the
initial conditions, then the terminal voltage
38
1.0526 18.20 1 0.3288I j
1.0 0 0.22 1.0526 18.20
1.0946 11.59 1.0723 0.220
sV j
j

A Steady-State Example, cont.
• We can then get the initial angle and initial dq
values
• Or
1.0946 11.59 2.0 1.052 18.2 2.814 52.1
52.1
E j
0.7889 0.6146 1.0723 0.7107
0.6146 0.7889 0.220 0.8326
d
q
V
V
0.7889 0.6146 1.000 0.9909
0.6146 0.7889 0.3287 0.3553
d
q
I
I
( /2 ) 1.0945 (11.6 90 52.1)
1.0945 49.5 0.710 0.832
j j
d q sV jV V e e
j
39

A Steady-State Example, cont.
• The initial state variable are determined by solving
with the differential equations equal to zero.
'
'
'
0.8326 0.3 0.9909 1.1299
0.7107 (0.5)(0.3553) 0.5330
( ) 1.1299 (2.1 0.3)(0.9909) 2.9135
q q s q d d
d d s d q q
fd q d d d
E V R I X I
E V R I X I
E E X X I
40