ECE 550 Lecture Notes 1

of 181
Transcript of ECE 550 Lecture Notes 1
-
8/6/2019 ECE 550 Lecture Notes 1
1/181
ECE 550
LINEAR SYSTEM THEORYLECTURE NOTES
Prof. Mario Edgardo Magaa
EECSOregon State University
-
8/6/2019 ECE 550 Lecture Notes 1
2/181
2
System Description:
A system Nis a device that maps a set of admissible inputs Uto a set ofadmissible output responses Y.
Mathematically, N: U Yory() = N[u()].
Alternatively, a system can be described either by differential or differenceequations in the time domain, or by algebraic equations in the complex
frequency domain.
Example: Let us describe the relationship between the input and the output ofthe following active filter system:
where vi(t) is the input voltage and v0(t) is the output voltage.
-
8/6/2019 ECE 550 Lecture Notes 1
3/181
3
Consider the first amplifier. Using nodal analysis,
The second amplifier yields
Assuming infinite input impedance, we get . Hence,
Furthermore, the two currents are described by
021
6
01
2
1
1
1 =++
++
cci ii
R
vv
R
v
R
vv
03
21
1=+
R
veic
05
02
4
22 =
+
R
ve
R
ve
1 2 0e e= =
1
52 3 0 2
4
= andcR
v R i v vR
=
-
8/6/2019 ECE 550 Lecture Notes 1
4/181
4
Thus,
( )1
1
1
1 1 1 1 1
c
c
dv dvd
i c c v e cdt dt dt = = =
( )22
1 2
2 2 1 2 2 2
c
c
dv dv dvdi c c v v c c
dt dt dt dt
= = =
12 3 1
dvv R c
dt= = dvcRv 2131
1
5 3 51 10 3 1 1
4 4
R R Rdv dvv R c c
R dt R dt
= =
02 4
5
dvdv Rdt R dt
=
1 4 4
0 1 03 5 1 3 5 1
dv R R
v v v d dt R R c R R c = =
-
8/6/2019 ECE 550 Lecture Notes 1
5/181
5
In terms of the input and output voltages,
0 1 1 2
1 1 21 2 6 1 6
1 1 1
0
iv v d v d v d v
v c c R R R R R d t d t d t
+ + + + =
0 04 4 4 2 40 0 0 2
3 5 1 1 2 6 1 6 3 5 3 5 1 5
1 1 1 0iv v dv R R R c Rv d v v cR R c R R R R R R R R R c R dt
+ + + + =
2
0 0 54 2 4 4 2
0 23 5 1 1 2 6 1 1 3 5 6 5 4
1 1 1 1 1
1 0i
dv dv d v R R c R R c
v R R c R R R R dt c R R R dt R dt R
+ + + + + =
2
5 5 0 020 2 2
3 1 1 2 6 1 4 1 3 4 6 2
1 1 1 1 1 11 0i
R dv R dv d vcv c
R c R R R R R dt c R R R dt dt c
+ + + + + =
or2
0 5 0 502
2 1 3 4 6 2 3 1 2 1 2 6 1 4 2
1 1 1 1 1 1 1 id v R dv R dvvdt c c R R R c dt R c c R R R R R c dt
+ + + + + =
-
8/6/2019 ECE 550 Lecture Notes 1
6/181
6
The last differential equation represents the time domain model of the active filter.
In the complex frequency domain, assuming zero initial conditions, the algebraic
relationship between input and output is
Since both models assume linear behavior of the active amplifier circuits, we
could also obtain an input-output model in terms of the convolution relationship in
the time domain.
5
1 4 20
2 5
2 1 3 4 6 2 3 1 2 1 2 6
( ) ( )1 1 1 1 1 1 1
i
R sR R c
V s V sR
s sc c R R R c R c c R R R
=
+ + + + +
-
8/6/2019 ECE 550 Lecture Notes 1
7/181
7
Input-Output Linearity:
A system Nis said to be linear if whenever the input u1 yields the output N[u1],
the input u2 yields the output N[u2], and
for arbitrary real or complex constants c1 and c2
Example:
Let the spring force be described by fk(x) =Kx, then
is an external force
[ ] [ ] [ ]22112211
uNcuNcucucN +=+
)(tfKxxBxM a=++ &&&
)(tfa
( )kf xx
( )af t
-
8/6/2019 ECE 550 Lecture Notes 1
8/181
8
Letfa(t) =fa1(t) +fa2(t) .
Letx1(t) be the solution whenfa(t) is replaced byfa1(t) andx2(t) be the solutionwhenfa(t) is replaced befa2(t) .
Then,
x(t) =x1(t) +x2(t) .
Let the spring force be now described byfk(x) = Kx2, then
This time, however,x(t) x1(t) +x2(t) , i.e., the linearity property does not holdbecause the system is now nonlinear.
Time Invariance and Causality
Let Nrepresent a system and y() be the response of such system to the inputstimulus u(), i.e., y() = N[u()]. If for any real T, y( - T) = N[u( - T)], then thesystem is said to be time invariant . In other words, a system is time invariant if
delaying the input by Tseconds merely delays the response by Tseconds.
)(2 tfKxxBxM a=++ &&&
-
8/6/2019 ECE 550 Lecture Notes 1
9/181
9
Let the system be linear and time invariant with impulse response h(t), then
If the same system is also causal, then fort 0,
Example: Let a system be described by the ordinary, constant coefficientsdifferential equation
then the system is said to be a lumped-parameter system.
Systems that are described by either partial differential equations or linear
differential equations that contain time delays are said to be distributed-parameter systems.
( ) ( ) ( ) ( ) ( )
t t
y t u h t d h u t d
= =
0 0
( ) ( ) ( ) ( ) ( )
t t
y t u h t d h u t d = =
)()()('...)()( 1)1(
1
)( tutyatyatyaty nnnn =++++
-
8/6/2019 ECE 550 Lecture Notes 1
10/181
10
Example: Consider the dynamic system described by
According to the previous definition, this is a distributed-parameter system.
Definition: The state of a system at time t0 is the minimum (set of internal
variables) information needed to uniquely specify the system response given
the input variables over the time interval [t0, ).
Example:
vi(t): Input voltage
i(t): Current flowing through circuity(t): Output variable (current flowing through inductor)
)1()()1()( 10 ++=+ tubtubtayty&
-
8/6/2019 ECE 550 Lecture Notes 1
11/181
11
Fort
t0, i(t0) = i0 , y(t) = i(t),
And the solution is given by
Hence, regardless of what vi(t) is fort < t0, all we need to know to predict thefuture of the output y(t) is the initial state i(t0) and the input voltage vi(t), t t0.
State Models
They are elegant, though practical, mathematical representations of the
behavior of dynamical systems. Moreover,
A rich theory has already been developed
Real physical systems can be cast into such a representation
10i i
di di Rv Ri L i v
dt dt L L + + = = +
0
0
( )( )
0 0
1( ) ( ) ( ) ,
t Rt
t tLi
t
i t e v d e i t t t L
= +
-
8/6/2019 ECE 550 Lecture Notes 1
12/181
12
Example:
By KVL, fort t0,
After taking the time derivative of the last equation, we get
0 R L C + + =
0
0
1( ) ( ) 0
t
C
t
di Ri L i d t
dt C
+ + + =
01
2
2
=++ i
LCdt
di
L
R
dt
id
-
8/6/2019 ECE 550 Lecture Notes 1
13/181
13
To solve this homogeneous differential equation, we may proceed as follows:
Let 1 and 2 (1 2) be the roots of the auxiliary equation
then, fort t0,
C1 and C2 can be uniquely obtained as follows:
From the knowledge ofi(t0) and vc(t0) we can compute
and therefore C1 and C2.
012 =++
LCL
R
)(
2
)(
10201)(
tttteCeCti
+=
210 )( CCti +=
22110
)( CC
dt
tditt +==
0
)(tt
dt
tdi=
-
8/6/2019 ECE 550 Lecture Notes 1
14/181
14
Using a state variable approach, letx1(t) = vc(t) andx2(t) = i(t), then fort t0
or
or
This is a first-order linear, constant coefficient vector differential equation! In
principle, its solution should be easy to find.
)(1
)(1)()(
21 tx
Cti
Cdt
tdv
dt
tdx c ===
)()(1
)()(11
)()()(
21
)(
02
0
txL
Rtx
Ltvdi
CLti
L
R
dt
tdi
dt
tdx
tv
C
t
t
C
=
+== 444 3444 21
,)(
)(
1
10
)(
)(
2
1
2
1
=
tx
tx
L
R
L
Ctx
tx
dt
d
=
)(
)(
)(
)(
0
0
02
01
ti
tv
tx
tx c
0( ) ( ) , ( ).t A t t =& x x x
-
8/6/2019 ECE 550 Lecture Notes 1
15/181
15
Specifically, fort t0
The solution to the vector state equation is more elegant, easier to obtain(provided there is an algorithm to compute eAt) and it specially makes the role
of the initial conditions (state) clear.
Linear State Models for Lumped-Parameter Systems
Consider the system described by the following block diagram
Mathematically, for t 0,
0( )0( ) ( )
A t t t e t
=x x
0( ) ( ) ( ) ( ) ( ) , ( )t A t t B t t t = +& x x u x
( ) ( ) ( ) ( ) ( )t C t t D t t = + y x u
B(t) C(t)
A(t)
D(t)
u(t) y(t)
x(t)x(t)
-
8/6/2019 ECE 550 Lecture Notes 1
16/181
16
wherex(t) Rn is the state vector, u(t) Rm is the input vector,y(t) Rr is the
output vector,A(t) Rnxn is the feedback (system) matrix, B(t) Rnxm is the
input distribution matrix, C(t) Rrxn is the output matrix and D(t) Rrxm is the
feed-forward matrix. Also,A(), B(), C() and D() are piecewise continuous
functions of time.
Definitions:
The zero-input state response is the response x() given x(t0) and u() 0.
The zero-input system response is the response y() given x(t0) and u() 0.
The zero-state state response is the response x() to an input u() whenever
x(t0)=0.
The zero-state system response is the response y() to an input u() wheneverx(t0)=0.
Let yzi() be the zero-input system response and yzs() be the zero-state system
response, then the total system response is given by y() = yzi() + yzs().
-
8/6/2019 ECE 550 Lecture Notes 1
17/181
17
Example:
Now,
or
or
Let and , then fort t0, the state model is
0)(5.0)(3)( =++ tvtvtu &
)(2)(6)( tutvtv +=&
.)(,)(,)(2)(6)( 00 tytytutyty &&&& +=
)()(1 tytx = )()()(2 tvtytx == &
=
+
=
=
)()()(,)(
20
)()(
6010
)()()(
02
01
0
2
1
2
1
txtxtxtu
txtx
txtxtx
&&&
[ ]
=
)(
)(01)(
2
1
tx
txty
0.5m Kg=
( )input force u t
( )3riction force v t
( )output position y t
( )velocity v t
-
8/6/2019 ECE 550 Lecture Notes 1
18/181
18
Now, the state solution is given by
where fort t0= 0, the matrix exponential eAt is described by
1. Zero-input state response: u(t) = 0, t 0andx(0) 0.
+=t
t
tAttA dBuetxetx
0
0 )()()( )(0)(
=
t
tAt
e
ee
6
6
0
6
1
6
11
+=
==
20
6
206
10
20
10
6
6
61
61
061
611
)0()(
xe
xex
x
x
e
exetx
t
t
t
tAt
-
8/6/2019 ECE 550 Lecture Notes 1
19/181
19
2. Zero-input system response: u(t) = 0, t 0andx(0) 0.
3. Zero-state state response: x(0) = 0.
[ ]6
10 20 610 20
6
20
1 11 1
6 6( ) ( ) (0) 1 06 6
t
At
t
x e x y t Cx t Ce x x e x
e x
+
= = = = +
d
e
eBdedBuetx
t
t
tt
tA
t
s
tA
===
2
0
0 6
1
6
11
)()(0
)(6
)(6
0
)(
0
)(
( )
( )
=
=
=
t
t
t
t
t
t
t
t
t
e
et
de
de
d
e
e6
6
0
)(6
0
)(6
0)(6
)(6
13
1
118
1
3
1
2
3
1
3
1
23
1
3
1
-
8/6/2019 ECE 550 Lecture Notes 1
20/181
20
4. Zero-state system response: x(0) = 0.
Fort 0, the complete state response is then given by
and the complete system response by
[ ]( )
( )( )t
t
t
et
e
ettCxty 6
6
6
118
1
3
1
13
1
118
1
3
1
01)()(
=
==
( )
( )
+
+=+=
t
t
t
tt
tAAt
e
et
xe
xex
dBuexetx6
6
20
6
20
6
10
0
)(
13
1
1
18
1
3
1
6
1
6
1
)()0()(
[ ] ( )tt etxextxtx
txtCxty 620
6
101
2
11
18
1
3
1
6
1
6
1)(
)(
)(01)()( +
+==
==
-
8/6/2019 ECE 550 Lecture Notes 1
21/181
21
State Models from Ordinary Differential Equations
Let a dynamic system be described by the nth order scalar differential equation
with constant coefficients, i.e.,
where m n.
Let the initial energy of the system be zero, then with n = 3 and m = 2,
Let us implicitly solve this equation, namely,
)(
111
)1(
1
)(
......
m
mmnn
nn
ubububyayayay +++=++++ +
&&
2
2
123322
2
13
3
)()()()()()()(dt
tudbdt
tdubtubtyadt
tdyadt
tydadt
tyd ++=+++
2
2
123322
2
13
3 )()()()(
)()()(
dt
tudb
dt
tdubtubtya
dt
tdya
dt
tyda
dt
tyd+++=
( ) ( ) ( ))()()()()()( 33221122
tyatubtyatubdtdtyatub
dtd ++=
-
8/6/2019 ECE 550 Lecture Notes 1
22/181
22
Integrating this last equation on step at a time, we get
This is the implicit solution of the original differential equation. This solution is
obtained via nested integration.
To obtain a state variable representation, we need to represent this implicit
solution in block diagram form (traditional analog simulation diagram).
( ) ( ) ( ) ++=t
dyaubtyatubtyatubdt
d
dt
tyd )()()()()()()( 33221122
( ) ( ) ( )
++= t ddyaubyaubtyatubdt
tdy
)()()()()()(
)(
332211
( ) ( ) ( )
dddyaubyaubyaubtyt
++= )()()()()()()( 332211
-
8/6/2019 ECE 550 Lecture Notes 1
23/181
23
Block diagram representation:
If we select the output of the integrators as the state variables. Then
3
13123
23212
3331
xy
ubxaxx
ubxaxx
ubxax
=
+=
+=
+=
&
&
&
1x&
3x&
2x&
-
8/6/2019 ECE 550 Lecture Notes 1
24/181
24
In matrix form,
This is the so-called observable canonical form representation.
Alternative state variable representation:
Let us apply the Laplace transform to the original scalar ordinary differential
equation, assuming zero initial conditions, i.e.,
or
uBxAu
b
b
b
x
a
a
a
x 00
1
2
3
1
2
3
10
01
00
+=
+
=&
[ ] xCxy 0100 ==
++=+++
2
2
123322
2
13
3 )()()()(
)()()(
dt
tudb
dt
tdubtubtya
dt
tdya
dt
tyda
dt
tydL
( ) ( ) )()(2
12332
2
1
3
sUsbsbbsYasasas ++=+++
-
8/6/2019 ECE 550 Lecture Notes 1
25/181
25
In transfer function form,
Let us rewrite the last equation as follows:
where
and
Observation:
The overall transfer function is a cascade of two transfer functions.
( )( ) 332211
3
3
2
2
1
1
32
2
1
3
2
123
1)()(
+++++=
+++++=
sasasasbsbsb
asasassbsbb
sUsY
( )1 2 31 2 3 1 2 31 2 3
( ) ( ) ( ) 1( ) ( ) 1( )
Y s Y s Y s b s b s b sU s U s a s a s a sY s
= = + + + + +
3
3
2
2
1
11
1
)(
)(
+++= sasasasUsY
3
3
2
2
1
1)(
)( ++= sbsbsbsY
sY
-
8/6/2019 ECE 550 Lecture Notes 1
26/181
26
Each of the transfer functions can be expressed in block diagram form, i.e.,
Observation: the term s-1 in the complex frequency domain corresponds to anintegrator in the time domain.
( )U s ( )Y s1 ( )s Y s 2 ( )s Y s 3 ( )s Y s
1s
1s
1s
1a
2a
3a
+
( )Y s
1 ( )s Y s 2 ( )s Y s 3 ( )s Y s
1
s
1
s
1
s
1b 2b 3b
+
+ +
( )Y s
-
8/6/2019 ECE 550 Lecture Notes 1
27/181
27
Putting the two diagrams together yields,
Again, choosing the outputs of the integrators as the state variables, we get
312213
3122133
32
21
xbxbxby
uxaxaxax
xx
xx
++=
+=
=
=
&
&
&
( )u t 3&
3x 2x 1x1s
1
s
1
s
1a
2a
3a
+
1b 2b 3b
+
+ +
( )y t
2x&
1x&
-
8/6/2019 ECE 550 Lecture Notes 1
28/181
28
In matrix form,
This form of the state equation is the so-called controllable canonical form.Observation:
Both canonical forms are the dual of each other.
Consider the controllable canonical form of some linear time invariant dynamicsystem, i.e.,
3 2 1
0 1 0 00 0 1 0
1
c c x x u A x B u
a a a
= + = +
&
[ ]3 2 1 cy b b b x C x= =
cc
cccc
xCy
uBxAx
=
+=&
-
8/6/2019 ECE 550 Lecture Notes 1
29/181
29
Then the observable canonical form is given by
Controllability and Observability (a conceptual introduction):
Suppose now that the initial conditions of an nth order scalar ordinary differential
equation are not equal to zero. How do we build the state models such that their
responses will be the same as that of the original scalar model?
Method 1: Given the nth order scalar differential equation
with state model
T
c
T
c
T
cT
c
Tc
Tc BCandCBAA
xBy
uCxAx ===
=+=
000
0
00 ,&
)(
1
)1(
211
)1(
1
)( ...... nnnnnnnn ububububyayayay ++++=++++ +
&&
)()()(
)()()(
tDutCxty
tButAxtx
+=
+=&
-
8/6/2019 ECE 550 Lecture Notes 1
30/181
30
wherex(t) Rn, u(t), y(t) R, A,B,Cand D are constant matrices of appropriate
dimensions.
Objective: Determine the initial state vectorx(0)=[x1(0) xn(0)]T from the initial
conditions and the input initial values
In the derivation of both observable and controllable canonical forms from an
ordinary linear differential equation with scalar constant coefficients we found that
D = 0, hence,
)0(),...,0(),0( )1( nyyy & )0(),...,0(),0( )1( nuuu &
)0()0()0()0()0()0(
)0()0()0()0()0()0()0(
)0()0()0()0(
)0()0(
)2()3(321)1(
2
+++++=
++=+==
+==
=
nnnnnn CBuCABuuBCABuCAxCAy
uCBCABuxCAuCBxCAxCy
CBuCAxxCy
Cxy
L&
M
&&&&&&&
&&
-
8/6/2019 ECE 550 Lecture Notes 1
31/181
31
In matrix form,
where Rnxn, TRnxn.To get a unique solutionx(0) for the last algebraic equation, it will be necessary
that the matrix be non-singular, i.e.,
x(0) = -1
[y(0) TU(0)].
The existence of-1 is directly related to the property of observability of a system.
Hence, to uniquely reconstruct the initial statex(0) from input and output
measurements, the system must be observable, i.e., -1 must exist. In fact, iscalled the observability matrix.
)0()0(
)0(
)0(
)0()0(
0
00000
)0(
)0(
)0(
)0()0(
)0(
)1(321
2
)1(
TUx
u
u
uu
CBBCABCA
CBCAB
CB
x
CA
CA
CAC
y
y
yy
Y
nnnnn
+=
+
=
=
M
&&
&
LMOOMM
MOO
LLLL
MM
&&
&
-
8/6/2019 ECE 550 Lecture Notes 1
32/181
32
Method 2: Suppose now that instead of using the input-output measurements to
reconstruct the state at time t = 0 we use impulsive inputs to change the value of
the state instantaneously,
Let
withx(0-) =x0, A Rnxn, B Rn, describe an nth order scalar differentialequation and
Clearly, u(t) is described by a linear combination of impulsive inputs.
We know that for t 0--
( ) ( ) ( ), 0x t Ax t Bu t t = + &
)()()()( )1(110 ttttun
n
+++= L&
+=
t
tAAt dBuexetx0
)( )()0()(
( ) ( 1)
0 1 1
0
(0 ) ( ) ( ) ( )
t
At A t n
ne x e B d
= + + + + & L
-
8/6/2019 ECE 550 Lecture Notes 1
33/181
33
But, the ith term in the integral can be rewritten as
Therefore,x(t) is given by
where
( ) ( ) ( ) ( 1) ( 1)
00 0
( ) ( ) ( )
t t
t A t i A t i At A ie B d e B e e AB d
= + ( ) ( 2) 2 ( 2)
0
0
( ) 1
0 0
( ) ( )
( ) ( )
tt
A t i At A i
tt
A t i At A i At i
e AB e e A B d
e A B e e A B d e A B
= +
= + =
M
1
1
10)0()( ++++= n
nAtAtAtAt BAeABeBexetx L
{ }1(0 ) At ne x B AB A B = + %L
[ ]Tn 110~
= L
-
8/6/2019 ECE 550 Lecture Notes 1
34/181
34
At time t = 0+, we get
where Q is the so-called controllability matrix.
Clearly, an impulsive input that will take the state from x(0-
) to x(0+
) will exist ifand only if the inverse ofQ exists, namely,
Digital Simulation of State Models
Dynamic systems are nonlinear in general, therefore, let us begin with the
following nonlinear time-varying dynamic system which is described by
1(0 ) (0 ) (0 )n x x B AB A B x Q + = + = + % %L
[ ])0()0(~ 1 + = xxQ
))(),(,()(
)()),(),(,()( 00
tutxtgty
xtxtutxtftx
=
==&
-
8/6/2019 ECE 550 Lecture Notes 1
35/181
35
Objective: We would like to know the behavior of the system over the time
interval t [t0, tn] for a given initial statex(t0) and input u(t), t [t0, tn].
In principle, for t [t0, tn],
However, to compute the integral analytically is very difficult in most cases.
Lets examine the following numerical approximations to the integral. Let n = 10.
Case 1 (forward Euler formula):
+=
t
t
duxftxtx
0
))(),(,()()( 0
-
8/6/2019 ECE 550 Lecture Notes 1
36/181
36
In this case,
Over one time interval,
At time tk,
Case 2 (backward Euler formula):
9910112001 )()()())(),(,(
10
0
fttfttfttduxf
t
t+++ L
11 )())(),(,(1
kkk
t
tfttduxf
k
k
))(),(,()()()( 11111 + kkkkkkk tutxtftttxtx
-
8/6/2019 ECE 550 Lecture Notes 1
37/181
37
For the kth time interval,
Therefore,
and the approximate solution is given by
Case 3 (trapezoidal rule):
10910212101 )()()())(),(,(10
0
fttfttfttduxf
t
t
+++ L
kkk
t
t
fttduxf
k
k
)())(),(,( 11
))(),(,()()()( 11 kkkkkkk tutxtftttxtx +
-
8/6/2019 ECE 550 Lecture Notes 1
38/181
38
In this case the integral is approximately equal to
Therefore, the solution at time tk is approximately equal to
Example: Obtain an approximate solution of the following linearized pendulumstate model at equally spaced time instants, tk tk-1 = 0.5.
with initial conditions
2)()(
2)()(
2)()())(),(,( 109910
2112
1001
10
0
ffttffttffttduxf
t
t
++++++ L
[ ]))(),(,())(),(,()(2
1)()( 11111 kkkkkkkkkk tutxtftutxtftttxtx ++
=
)t(x
)t(x
)t(x
)t(x
1
2
2
1
4&
&
1
2
x (0)40
x (0)0
=
-
8/6/2019 ECE 550 Lecture Notes 1
39/181
39
Forward Euler Method:
Backward Euler Method:
Trapezoidal Rule Method:
+=
+
)t(x)t(x)t(x.)t(x
)t(x)t(x.
)t(x)t(x
)t(x)t(x
kk
kk
k
k
k
k
k
k
1112
1211
11
12
12
11
2
1
250
450
+=
+
)t(x)t(x
)t(x.)t(x
)t(x
)t(x.
)t(x
)t(x
)t(x
)t(x
kk
kk
k
k
k
k
k
k
112
211
1
2
12
11
2
1
2
50
450
( )( )
+
++=
++
)t(x)t(x)t(x
)t(x)t(x.)t(x)t(x)t(x
)t(x)t(x)tt(.
)t(x
)t(x
)t(x
)t(x
kkk
kkk
kk
kk
kk
k
k
k
k
11112
12211
111
122
1
12
11
2
1
25044
50
-
8/6/2019 ECE 550 Lecture Notes 1
40/181
40
Linear Discrete-Time Systems
Implementation of dynamic systems is actually done using digital devices like
computers and/or DSPs. Moreover, there are some naturally occurring processes
which are discrete-time. Hence, it is convenient to model such systems as
discrete-time systems.
In most cases, the system is discretized at time t = tk. This is illustrated in the
figure below (a sampled-data system).
t=tk t=tk
u(t) u(tk) y(t) y(tk)
h(t)
-
8/6/2019 ECE 550 Lecture Notes 1
41/181
41
Consider a linear, discrete-time system described by
Since the system is linear, its behavior is described by the convolution relation.
Let tk= kT, then
Let u(kT) = (kT), the unit sample, i.e.,
then,
is called the unit sample response.
=
=n
nTunTkThkTy )()()(
==
otherwise
kkT
,0
0,1)(
)()()()( kThnTnTkThkTyn
==
=
u(tk) y(tk)h(tk)
-
8/6/2019 ECE 550 Lecture Notes 1
42/181
42
Let the system be causal, i.e., h(kT) = 0, k < 0then
In addition, ifu(kT) = 0 fork < 0, then
State representation of discrete-time dynamic systems:
Consider a linear discrete-time dynamic system described by the differenceequation
where the sampling interval has been normalized, i.e., T = 1 sec.
=
=k
n
nTunTkThkTy )()()(
= =k
n
nTunTkThkTy0
)()()(
)()1()2()1()( 121 kyakyankyankyanky nn +++++++++ L
)()1()( 11 mkubkubkub mm +++++= + L
-
8/6/2019 ECE 550 Lecture Notes 1
43/181
43
If we now replace differentiations with forward shift operators and integrators with
backward shift operators then we can construct the same type of canonical
realizations that we built for continuous-time systems.
Example: Let n = 3, m = 2 and y(0) = y(1) = y(2) = u(0) = u(1) = u(2) = 0, then
Let us apply the backwards shift operator to this equation one at a time:
The solution y(k) can now be computed implicitly using a simulation block
diagram.
)()()1()1()2()2()3( 332211 kyakubkyakubkyakubky ++++++=+
[ ])()()()()1()1()2()3( 331
2211
1 kyakubqkyakubkyakubkykyq ++++=+=+
[ ] [ ]{ })()()()()()()1()2( 331221111 kyakubqkyakubqkyakubkykyq ++=+=+
[ ] [ ] [ ])()()()()()()()1( 331
22
1
11
11 kyakubqkyakubqkyakubqkykyq ++==+
-
8/6/2019 ECE 550 Lecture Notes 1
44/181
44
Simulation diagram implementation:
Using the outputs of the shift operators as the state variables, we get
)()()()1(
)()()()1(
)()()1(
13123
23212
3331
kubkxakxkx
kubkxakxkx
kubkxakx
+=+
+=++=+
)()( 3 kxky =
-
8/6/2019 ECE 550 Lecture Notes 1
45/181
45
In matrix form,
In general, a discrete-time system can be represented by (assuming T = 1)
wherex(k) Rn, u(k) Rm, y(k) Rr,A, B, Cand D are constants matrices of
appropriate dimensions.
As in the continuous-time case, we can reconstruct the state from input-output
measurements.
)()(
10
01
00
)1(
1
2
3
1
2
3
ku
b
b
b
kx
a
a
a
kx
+
=+
[ ] )(100)( kxky =
)()()(
)()()1(
kDukCxky
kBukAxkx
+=+=+
-
8/6/2019 ECE 550 Lecture Notes 1
46/181
46
Iteratively,
In matrix form,
)1()2()1()()()1(
)2()1()()()2()2()2(
)1()()()1()1()1()()()(
321
2
++++++++=+
+++++=+++=+
+++=+++=++=
nkDunkCBukBuCAkBuCAkxCAnky
kDukCBukCABukxCAkDukCxky
kDukCBukCAxkDukCxkykDukCxky
nnn L
M
)()(
)1(
)2(
)1(
)(
0
00
000
)(
)1(
)2(
)1(
)(
)(
321
2
kTukx
nku
ku
ku
ku
DCBBCABCA
DCBCAB
DCB
D
kx
CA
CA
CA
C
nky
ky
ky
ky
ky
nnn
+=
+
+
+
+
=
+
+
+
=
M
L
OOMM
M
L
L
MM
-
8/6/2019 ECE 550 Lecture Notes 1
47/181
47
Ifhas full rank, thenx(k) = -#[y(k)-Tu(k)], i.e., if the system is observable then
we can reconstruct the state at time kusing input, output measurements up to timek+n-1, where -# is the pseudoinverse of.
Solution of the discrete-time state equation
Iteratively,
and
=
+=
++++=+=+++=+=
++=+=
+=
1
0
1
234
23
2
)()0()(
)3()2()1()0()0()3()3()4()2()1()0()0()2()2()3(
)1()0()0()1()1()2(
)0()0()1(
k
l
lkk lBuAxAkx
BuABuBuABuAxABuAxxBuABuBuAxABuAxx
BuABuxABuAxx
BuAxx
M
)()()0()(1
0
1 kDulBuACxCAkyk
l
lkk +
+=
=
-
8/6/2019 ECE 550 Lecture Notes 1
48/181
48
From the last equation,
where Q is the controllability matrix
and
To assure the existence of an input such that the state of the system can reach a
desired state at time k+n given the value of the sate at time k, the following
relationship must be satisfied
where is the pseudo inverse ofQ
In other words, the system must be controllable.
)()()( kQUkxAnkx n =+
][ 1BAABBQ n= L
+
+
=)(
)2(
)1(
)(
ku
nku
nku
kU M
#( ) ( ) ( )nU k Q x k n A x k = + #Q
-
8/6/2019 ECE 550 Lecture Notes 1
49/181
49
Linearization of Nonlinear Systems
Consider the following scalar nonlinear system
where g():.
Let the nominal operating point be and let N be a neighborhood of it,
i.e., N = {x : a < x < b} and a < x0 < b. If the function g() is analyticon N, i.e., it is infinitely differentiable on N, then forx such thatx0+xN, we get the following Taylor series expansion
For small x,
g()x(t) y(t)
0x
0 0
22
0 02
1( ) ( )
2! x x x x
dg d g g x x g x x x
dx dx= =+ = + + +L
0 00 0 0( ) ( ) x x x x
dg dg y g x x g x x y x
dx dx= == + + = +
-
8/6/2019 ECE 550 Lecture Notes 1
50/181
50
Therefore, the linear approximation of a nonlinear system y = g(x) near
the operating point x0 has the form
or
where
Example: Consider a semiconductor diode described by
where vo=vt.
In this case,
00 x xdg y y xdx
= =
0 y y m x =
0x x
dgm
dx==
0 ln 1 ( )s
iv v g i
i
= + =
0 0
0
0
1 1
1i i o i d
s s
s
vdgm v r
idi i i i
i
=
= = = =
+ +
0v
-
8/6/2019 ECE 550 Lecture Notes 1
51/181
51
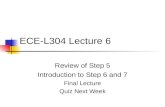
The linearized model is then given by
Using the parameters = 2, vt= 0.026 V, is = 1 nA, i0 = 0.05 A, v0 = 0.92 V,rd= 18.44 , we get the following linear approximation:
0
0d
s
vv m i i r i
i i = = =
+
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
i in Amps
v
in
Volts
-
8/6/2019 ECE 550 Lecture Notes 1
52/181
52
If, on the other hand, y=g(x1,x2,,xn), then if g() is analytic on the setN={xn:a
-
8/6/2019 ECE 550 Lecture Notes 1
53/181
53
In other words,
Assume that we know xn(t). Perturb the state and the input by taking x(t0)
= x0 + x0 and u(t) = un(t0) + u(t).
We want to find the solution to
For fixed values of t, and f() an analytic function on some neighborhood
of xn(t) and un(t), we get
where
0 0 0( ) ( ( ), ( ), ) , ( ) , for n n n nx t f x t u t t x t x t t = = &
0 0 0 0( ) ( ( ) ( ), ( ) ( ), ) , ( ) ( ) , for n n nx t f x t x t u t u t t x t x t x t t = + + = + &
( ( ) ( ), ( ) ( ), ) ( ( ), ( ), )
( )
( , , ) higher order terms( )nn
n n n n
x xu u
f x t x t u t u t t f x t u t t
x t
f x u t u t==
+ + =
+ + ( , , )
f ff x u t
x u
=
-
8/6/2019 ECE 550 Lecture Notes 1
54/181
54
Let and
Then
Therefore,
Example: Let
Clearly,
Now,
( ( ), ( ), )( )
n
n
x xu u
f x t u t t a t
x==
( ( ), ( ), )
( )n
n
x xu u
f x t u t t b t
u==
( )( ) ( )( ( ), ( ), ) ( ) ( ) ( ) ( )n n n
dx tdx t d x t f x t u t t a t x t b t u t
dt dt dt
= + + +
0 0
( )( ) ( ) ( ) ( ) , ( )
d x ta t x t b t u t x t x
dt
+ =
2 0 0( ) ( ) ( ) , ( )x t x t u t x t x= + =&
2( ( ), ( ), ) ( ) ( )f x t u t t x t u t = +
( ( ), ( ), )( ) 2 ( )
n
n
x x nu u
f x t u t t a t x t
x==
=
-
8/6/2019 ECE 550 Lecture Notes 1
55/181
55
( ( ), ( ), )( ) 1
n
n
x xu u
f x t u t t b t
u==
=
and
So,
Let
Finally,
0 0
( )2 ( ) ( ) ( ) , ( )n
d x tx t x t u t x t x
dt
+ =
0( ) 0, 1 and ( ) (1) 1, thenn n nu t t x t x= = =
2
1 2 1 22
( ) ( ) , (1) 1
( ) 1 1and ( ) , 1
( )( )
n n n
nn
nn
dx t x t xdt
dx tdt c t c c c x t t
x t t x t
= =
= + = + = =
0
( ) 2( ) ( ) , (1) , 1
d x tx t u t x x t
dt t
+ =
-
8/6/2019 ECE 550 Lecture Notes 1
56/181
56
II. Vector Case. Consider now the case of a system described by the following
nonlinear vector differential equation:
The ith element of the vector differential equation is described by
Moreover,
where
0 0 0( ) ( ( ), ( ), ) , ( ) , ( ) , ( ) for n mt t t t t t t t t = = &x f x u x x x u
0 0 0( ) ( ( ), ( ), ) , ( ) , ( ) , ( ) for n m
i it t t t t t t t t = = &x f x u x x x u
( ( ) ( ), ( ) ( ), ) ( ( ), ( ), )
( )
( , , ) higher order terms( )nn
i n n i n n
i
f t t t t t f t t t
t
f t t==
+ + =
+ + x xu u
x x u u x u
x
x u u
( , , ) ( , , ) ( , , )i i i f t f t f t = x u x u x u x u
-
8/6/2019 ECE 550 Lecture Notes 1
57/181
57
and
or
1 2
( , , ) i i iin
f f f f t
x x x
=
Lx x u
1 2
( , , ) i i iim
f f f f t
u u u
=
Lu x u
1 1
1 1
2 2 2 2
( , , ) ( , , )
( , , ) ( , , )
( , , ) ( , , )
n n
n n
n n
n n
n n
n n
n n
n n
f t f t
x x x f t x f t d
dt
x x
f t f t
= == =
= == =
= == =
= +
M M
M M
x x x u x x u u u u
x x x u x x u u u u
x x x u x x u u u u
x u x u
x u x u
x u x u
1
2
m
uu
u
M
-
8/6/2019 ECE 550 Lecture Notes 1
58/181
58
Finally, if the outputs of the nonlinear system are of the form
Then
( ) ( ( ), ( ), ) , ( ) pt t t t t = y g x u y
1 1
1 1
2 2 2 2
( , , ) ( , , )
( , , ) ( , , )( )
( , , ) ( , , )
n nn n
n n
n n
n n
n n
p n
p p
g t g t
y x
y g t x g t t
y x
g t g t
= == =
= == =
= =
= =
= = +
M MM M
x x x u x x u u u u
x x x u x x u u u u
x x x u x x
u u u u
x u x u
x u x uy
x u x u
1
2
m
u
u
u
M
-
8/6/2019 ECE 550 Lecture Notes 1
59/181
59
Example: Suppose we have a point mass in an inverse square law force field,
e.g., a gravity field as shown below
where r(t) is the radius of the orbit at time t
(t) is the angle relative to the horizontal axisu1(t) is the thrust in the radial direction
u2
(t) is the thrust in the tangential direction
m is the mass of the orbiting body
m
u1(t)u2(t)
(t)r(t)
orbit
-
8/6/2019 ECE 550 Lecture Notes 1
60/181
60
From the laws of mechanics and assuming m = 1kg, the total force in the radial
direction is described by
and the total force in the tangential direction is
Select the states as follows:
Then,
22
12 2
( ) ( )( ) ( )
( )
d r t d t K r t u t
dtdt r t
= +
2
22
( ) 2 ( ) ( ) 1( )
( ) ( )
d t d t dr t u t
r t dt dt r t dt
= +
1 2 3 4
( ) ( )( ) ( ) , ( ) , ( ) ( ) , ( )
dr t d t x t r t x t x t t and x t
dt dt
= = = =
1 2
22 1 4 12
1
( ) ( )
( ) ( ) ( ) ( )( )
x t x t
Kx t x t x t u t
x t
=
= +
&
&
-
8/6/2019 ECE 550 Lecture Notes 1
61/181
61
Which implies that
For a circular orbit and u1n(t) = u2n(t) = 0 and t0 = 0, we have
3 4
2 44 2
1 1
( ) ( )
( ) ( ) 1( ) 2 ( )
( ) ( )
x t x t
x t x t x t u t
x t x t
=
= +
&
&
2
21 4 12
1
4
2 4 2
1 1
( ( ), ( ), ) .
2
x
K x x u
xt t t
x
x x u
x x
+
= +
f x u
0 0( ) 0 , 0T
n t R t t = x
( )d
-
8/6/2019 ECE 550 Lecture Notes 1
62/181
62
where rn(t) =R and
Linearizing about xn(t) and un(t), yields
0 3
( ).n
d t K
dt R
= =
[ ]1( , , ) 0 1 0 0nn
f t =
=
= x x x u u
x u
2 22 4 1 4 0 03
1
2( , , ) 0 0 2 3 0 0 2
n
n
n
n
K f t x x x R
x =
=
= = + = =
x x x u u
x xx u
u u
[ ]3 ( , , ) 0 0 0 1nn
f t ==
= x x x u u
x u
02 4 2 4 24 2
1 11
2( , , ) 2 0 2 0 2 0 0n
n
n
n
x x u x xf t x x Rx
==
= = = = x x x
u u
x xx uu u
-
8/6/2019 ECE 550 Lecture Notes 1
63/181
63
Likewise,
In state form,
[ ]1( , , ) 0 0nn
f t ==
=u x xu u
x u
[ ]2 ( , , ) 1 0nn
f t ==
=u x xu u
x u
[ ]3 ( , , ) 0 0nn
f t ==
=u x xu u
x u
41
1 1( , , ) 0 0
n n
n n
f tx R= == =
= =
u x x x x u u u ux u
20 0
0
0 1 0 0 0 0
1 03 0 0 2
0 00 0 0 1
100 2 0 0
R
RR
= +
x x u
-
8/6/2019 ECE 550 Lecture Notes 1
64/181
64
Existence of solution of differential equations
Consider the following unforced, possibly nonlinear dynamic system described by
where x(t0) = x0, x(t) Rn and f(,):RxRn Rn.
Then the state trajectory ( ; t0,x0) is a solution to over the time interval [a,b] ifand only if(t0; t0, x0) = x0and for all t [a,b].
Def. Let D RxRn be a connected, closed, bounded set. Then the function f(t,x)
satisfies a local Lipschitz condition at t0on D with respect to (t0, x) D if there
exists a finite constant k (t0,x1), (t0,x2) D,
where kis the Lipschitz constant.
( ) ( , ( ))t t t=& x f x
0 0 0 0( ; , ) ( , ( ; , ))t t x t t t =& x
0 1 0 2 1 2 22( , ) ( , )t t k f x f x x x
Gl b l E i t d U i
-
8/6/2019 ECE 550 Lecture Notes 1
65/181
65
Global Existence and Uniqueness:
Assumptions:1. SR+ [0, ) contains at most a finite number of points per unit interval.
2. For each xRn, f(t, x) is continuous at tS.
3. For each ti S, f(t, x) has finite left and right hand limits at t = ti.
4. f(,) : R+xRn Rn satisfies the global Lipschitz condition, i.e., there exists a
piecewise continuous function k():R+R+ such that
for all tR+ and all x1, x2Rn.
Theorem: Suppose that assumptions (1) (4) hold. Then for each t0R+ and x0
Rn there exists a unique continuous function (; t0, x0) : R+ Rn such that(a) and (b) ( t0; t0,x0) =x0, tR+ and tS.By uniqueness we mean that if1 and 2 satisfy conditions (a) and (b) then1(t; t0, x0) = 2(t; t0, x0) tR+.
1 2 1 22 2
( , ) ( , ) ( )t t k t f x f x x x
0 0 0 0( ; , ) ( , ( ; , ))t t t t t =& x f x
-
8/6/2019 ECE 550 Lecture Notes 1
66/181
66
Consider now the unforced, linear, time-varying system
,x(0) =x0
whereA(t) Rnxn and its components aij(t) are piecewise continuous.
Theorem: IfA() is piecewise continuous, then for each initial conditionx(0), asolution (; 0, x0) to the equation exists and is unique.
Proof: Define the sets Dj= [j 1, j) forj = 1, 2, .
Then, ,
SinceA() is piecewise continuous on R+, it must be piecewise continuous for
each t Dj, j = 1, 2, . Therefore, for arbitraryx1, x2 Rn ,
U
=
+=1j
j RD
221,221221)())(()()( xxtAxxtAxtAxtA
jD=
( ) ( ) ( )t A t t =&x x
-
8/6/2019 ECE 550 Lecture Notes 1
67/181
67
for all Dj, j = 1, 2,
Let , tR+, then , where k(t) is a
piecewise continuous function fortR+. Therefore, for eachx(0) Rn, a unique
solution (; 0, x0) to exists.
Example: Verify that the differential equation
with initial conditionx(0) = [1 0]T has a unique solution.
First of all, all the entries ofA(t) are continuous functions of time.
But,
which implies that there exists a unique solution since k(t) = 1 + 2tis continuous t
R+.
Consider now the linear time-varying unforced dynamic system described by
jD
tAtk,
)()(
= 1 2 1 22 2
( ) ( ) ( )t x A t x k t x x
)(1
12)( tx
t
ttx
=&
221221)21()()()(21)( xxtxtAxtAtkttA +=+=
Th L t A(t) Rnxn b i i ti Th th t f ll l ti f
-
8/6/2019 ECE 550 Lecture Notes 1
68/181
68
Theorem: LetA(t) Rnxn be piecewise continuous. Then the set of all solutions of
forms an n-dimensional vector space over the field of the real
numbers.
Proof: Let { 1, 2, , n} be a set of linearly independent vectors in Rn, i.e.,
, if and only ifi = 0, i = 1, 2, , n; and i() be thesolutions of with initial conditions i(t0) = i, i = 1, 2, , n.
Suppose that the is, i = 1, 2, , n are linearly dependent, then i R, i = 1, 2, ,
n, such that tR+.
At t = t0R+,
the is are linearly dependent, which is an outright contradiction of the
hypothesis that the is are linearly independent. Therefore, the is are linearly
independent for all tR+.
0
~2211 =+++ nn L
0~
)()()( 2211 =+++ ttt nn L
-
8/6/2019 ECE 550 Lecture Notes 1
69/181
69
Let be any solution of and (t0) = . Since the is are linearly independent
vectors in Rn, can be uniquely represented by
But, is a solution of with initial condition
This is because
In other words, the linear combination
satisfies the differential equation .
Therefore, () = implies that every solution of is a linear
combination of the basis of solutions i(), i= 1, 2, , n, i.e., the set of all solutions
of forms an n-dimensional vector space.
=
=n
i
ii
1
==
n
i
ii t1
0 )(
====
===
n
i
ii
n
i
ii
n
i
ii
n
i
ii ttAttAttdt
d
1111
)()()()()()( &
E l C id h d i l d ib d b
-
8/6/2019 ECE 550 Lecture Notes 1
70/181
70
Example: Consider the dynamical system described by
Let the vectors 1 and 2 be described by and .
Then, and are two independent solutions to the system
with initial conditions 1(0) = 1 and 2(0) = 2.
Therefore, any solution (t) will be given by
i R, i= 1, 2.
)(0
00)( tx
ttx =
&
=
0
11
=
1
02
= 21
2
11
)(t
t
=
1
0)(2 t
-
8/6/2019 ECE 550 Lecture Notes 1
71/181
71
Def. The state transition matrix of the differential eq. is given by
where the is, i= 1, 2, , n are the basis solutions, i = [0 0 1 0 0]T.
Properties of the state transition matrix:
1. (t0
, t0
) = I
Proof: Recall that
Thus (t0, t0) = I.
2. (t, t0) satisfies the differential eq. , M(t0) =I, M(t) Rnxn.
Proof: The time derivative of the state transition matrix is given by
However,
[ ]0 0( ; , ) 0 0 1 0 0T
i i it t = = L L
)()()( tMtAtM =&
[ ]),;(),;(),;(),( 02021010 nn ttttttttdt
d &L&&=
),;()(),;( 00 iiii tttAtt =&
Therefore
-
8/6/2019 ECE 550 Lecture Notes 1
72/181
72
Therefore,
Also, from part (1), (t0, t0) = I.
3. (t, t0) is uniquely defined.
Proof: Since each i is uniquely determined byA(t) for each initial condition i
then (t, t0) is also uniquely determined byA(t).
Proposition: The solution to ,x(t0) =x0 isx(t) = (t, t0)x0 t.
Proof: At t= t0, (t0, t0)x0 =Ix0 = x0.
We already know that .
Therefore,
In other words, , satisfies the differential equation.
[ ]),;()(),;()(),;()(),( 02021010 nn tttAtttAtttAtt L& =
[ ] ),()(),;(),;(),;()( 00202101 tttAtttttttA nn == L
),()(),( 00 tttAtt =&
0000 ),()(),( xtttAxtt =&
00 ),( xtt
If t and t A(t) has the following commutative property:
-
8/6/2019 ECE 550 Lecture Notes 1
73/181
73
If tand t0,A(t) has the following commutative property:
Then,
Example: Compute the state transition matrix (t, t0) for the differential equation,
We can show that
)()()()(00
tAdAdAtA
t
t
t
t
=
0
( )
0( , )
t
t
d
t t e
=
)(10
1)(
2
txe
tx
t
=&
( )
+
== 0
2
0
22
0
0
)(2
1)()()()(
0
00 tt
etteetttAdAdAtA
tttt
t
t
t
H
-
8/6/2019 ECE 550 Lecture Notes 1
74/181
74
Hence,
and
0
0 0 0
2 3( )
0
1 1( , ) ( ) ( ) ( )2! 3!
t
t
A d t t t
t t tt t e I A d A d A d
= = + + + + L
( ) ( )( )
( )( )( )
( ) +
+
+=
!20
!2
1
!20
2
1
10
012
0
22
0
2
0
0
22
0
0
0
tt
eetttt
tteett
tttt
( ) ( ) ( )( )
L+
!30
!323
!33
0
22
2
0
3
0 0
tt
eetttt tt
)(3
0
2
000110)(
!3
1)(
!2
1)(1),(
ttetttttttt
=++= L
( ) ( ) ( ) 2222222 1311
-
8/6/2019 ECE 550 Lecture Notes 1
75/181
75
Finally,
Hence, the state transition matrix is given by
We can see that the norm of the state transition matrix blows up as time t goes to
infinity, therefore, the system is unstable.
( ) ( ) ( ) L+= 202202222012 )(!3
1
2
3)(
!2
1
2
1),( 000 tteetteeeett
tttttt
( )0),(),( 011022tt
etttt==
( ) ( )( )
=
++
0
000
02
1
),(3
0
tt
tttttt
e
eeett
Theorem:A(t) and commute ift
dA )(
-
8/6/2019 ECE 550 Lecture Notes 1
76/181
76
( )
1. A() is constant
2. A(t) = (t)M, () :R R and Mis a constant matrix
3. , i() :R R and the Mis are constant matrices such that
MiMj = MjMi i, j.
Proof:
(1) IfA() is a constant matrix, i.e.,A() =A, then
(2) IfA(t) = (t)M, then
t0
)(
=
=k
i
ii MttA1
)()(
2
00
22 )()(
00
AttttAIdAAdAt
t
t
t
===
2
0
2
)(00
AttAIdAAd
t
t
t
t ==
But
-
8/6/2019 ECE 550 Lecture Notes 1
77/181
77
But,
(3) If then
But,
2
0000
)()()()()()()()( MdtMtMdIMtMdtAdA
t
t
t
t
t
t
t
t ===
=
=k
i
ii MttA1
)()(
= == = ==k
i
t
tjij
k
ji
k
i
t
tjj
k
jii MMdtMdMt 1 11 1
00)()()()(
=
=
====k
i
ii
k
j
j
t
t
j
k
i
ii
t
t
k
j
jj
t
t
MMdMdMtAdA1111
)()()()()()(
000
0 01 1 1 1
( ) ( ) ( ) ( )
t tk k k k
j j i i i j j i
j i j it t
d M t M t d M M = = = =
= =
-
8/6/2019 ECE 550 Lecture Notes 1
78/181
or, tttt
-
8/6/2019 ECE 550 Lecture Notes 1
79/181
79
or,
Def. Any nxn matrix M(t) satisfying the matrix differential equation
M(t0) = M0, where det(M0) 0 is a fundamental matrix of solutions.
Theorem: If det(M0) 0 then det(M(t)) 0 tR+
Proof: (By contradiction) Suppose there exists t1 R+ such that det(M(t1)) = 0.
Let v= [v1 v2 vn]T 0 such that M(t1)v= 0 andx(t) = M(t)vbe the solution to the
vector differential equation ,x(t1) = 0. Notice also that z() 0 is a
solution to , z(t1) = 0. By the uniqueness theorem we conclude that
x(t) = z(t) everywhereA(t) is piecewise continuous.
But, z(t0) =x(t0) = M(t0)v= 0 det(M0) = 0, which is a contradiction. Hence,det(M(t)) 0 t, i.e., M(t) is nonsingular t.
=
=
=
k
i
dMMdMdMd
t
t
ii
t
t
kk
t
t
t
t eeeett1
)()()()(
0000
22
0
11
),(
L
)()()( tztAtz =&
,)()()( tMtAtM =&
Def Let M(t) be any fundamental matrix of Then t R+ the state
-
8/6/2019 ECE 550 Lecture Notes 1
80/181
80
Def. Let M(t) be any fundamental matrix of . Then, tR+, the state
transition matrix of is given by, (t,t0) = M(t)M-1(t0).
Theorem (Semigroup Property): For all t1, t0and t, we have (t,t0) = (t,t1) (t1,t0).
Proof: We know from the existence and uniqueness theorem that
x(t) = (t,t0)x(t0) for any t,t0 (a)x(t1) = (t1,t0)x(t0) for any t1,t0 (b)
and x(t) = (t,t1)x(t1) for any t,t1 (c)
are solutions to the differential equation with initial conditionsx(t0
)
andx(t1). But, from (c) and (b)
x(t) = (t,t1)x(t1) = (t,t1) (t1,t0)x(t0) (d)
Comparing (a) and (d) leads us to conclude that
(t,t0) = (t,t1) (t1,t0) for any t, t1 and t0.
Theorem (The Inverse Property): (t,t0
) is nonsingular t, t0
R+ and -1(t,t0
) =
(t0,t).
Proof: Since (t t ) is a fundamental matrix of then it is nonsingular
-
8/6/2019 ECE 550 Lecture Notes 1
81/181
81
Proof: Since (t,t0) is a fundamental matrix of , then it is nonsingular
for all t, t0R+.
Now, from the semigroup property we know that for arbitrary t0, t1, tR+ ,
(t,t0) = (t,t1) (t1,t0).
Fort0= t, we get,
(t,t) = I= (t,t1) (t1,t) -1
(t,t1) = (t1,t) and since t1 is arbitrary we have that-1(t,t0) = (t0,t).
Theorem (Liouville formula):
Consider now the linear, time-varying dynamic system modeled by
withx(t0) =x0 .
Theorem: The solution to the state equation is given by
( )=
t
t
dAtr
ett 0)(
0 )],(det[
)()()()()( tutBtxtAtx +=&
)()()()()( tutDtxtCty +=
0
0 0( ) ( , ) ( , ) ( ) ( )
t
t
x t t t x t B u d = +
where
-
8/6/2019 ECE 550 Lecture Notes 1
82/181
82
where
1. (t,t0)x0 is the zero-input state response, and
2. is the zero-state state response.
Proof: At t = t0, the solution to the differential equation is given by
Now,
since
t
t
duBt
0
)()(),(
000000
0
0
)()(),(),()( xduBtxtttx
t
t
=+=
+=
+
t
t
t
t
duBtt
xttduBtxttdt
d
00
)()(),(),()()(),(),( 0000 &
++=
t
t
duBtt
tutBttxtttA
0
)()(),()()(),(),()(00
+=
=
t
t
t
t
t
dtft
tfdtft
00
),(),(),(
Hence
-
8/6/2019 ECE 550 Lecture Notes 1
83/181
83
Hence,
The complete response should be given by
Let us now consider the time-invariant case, i.e.,A(t) =A, B(t) = B, C(t) = Cand
D(t) = D, whereA, B, Cand D are constant matrices.
Theorem: The state transition matrix of the time-invariant state model is
[ ] ++=
t
t
duBttAtutBxtttAdt
d
0
)()(),()()()(),()(00
)()()()()()()()(),(),()(
0
00 tutBtxtAtutBduBtxtttAt
t
+=+
+=
)()()()(),()(),()()(
0
00 tutDduBttCxtttCtyt
t
++=
)(
000)0,(),(
ttAetttt
==
Proof: Since A and commute, we have thatt
Ad
-
8/6/2019 ECE 550 Lecture Notes 1
84/181
84
Proof: SinceA and commute, we have that
The complete state and system responses are now given by
This follows from the fact that (t,t0) = M(t)M-1(t0) since we can always let
M(t) = eAt, i.e.,
t
Ad
0
( )[ ] )()0,(exp),( 0000 0 ttttttAett
t
t
Ad
===
=
+=+=t
t
AAtttA
t
t
tAttA dBueexedBuexetx
0
0
0
0 )()()( 0)()(
0
)(
)()()(0
0
0
)(
tDudBueCexCety
t
t
AAtttA
++=
)(1
0
1 000 )()()(ttAAtAtAtAt eeeeetMtM
===
Def If A is an nxn matrix C e Cn and the equation
-
8/6/2019 ECE 550 Lecture Notes 1
85/181
85
Def. IfA is an nxn matrix, C, eC and the equation
Ae= e, e0
is satisfied, then is called an eigenvalue ofA and e is called an eigenvector ofA
associated with . Also, the eigenvalues ofA are the roots of its characteristics
polynomial, i.e.,
The set (A) = {1, 2,, n} is called the spectrum ofA. The spectral radius ofA is
the non negative real number
The right eigenvectoreiofA associated with the eigenvalue isatisfies the
equationAei
= i
ei
, whereas the left eigenvectorwi
Cn ofA associated with i
satisfies the equation wi*A = iwi*, where ()* designates the complex conjugate
transpose of a vector. If (A) and is complex then * (A). The eigenvectors
associated with and * will be eand e*, respectively.
)())(()det()( 2111
1 nnnnn
A aaaAI =++++== LL
{ }AA ii = :max)(
Example: Find the right eigenvectors of the matrix
-
8/6/2019 ECE 550 Lecture Notes 1
86/181
86
p g g
The characteristic polynomial of A is given by
Therefore, its spectrum is described by (A) = {-1, -1 - j2, -1 + j2}
Now,
or
For1
= -1, we get
=
010
011
552
A
)52)(1(573)det()( 223 +++=+++== AIA
0~~)(~~ == iiiii eAIeeA
0
~~
10011
552
=
+
+
i
i
i
i
e
551
-
8/6/2019 ECE 550 Lecture Notes 1
87/181
87
or
let e13 = 1, then e12= -1, then
For2 = -1 j2,
0~~
110
001
551
1 =
e
13121312
1111
131211
000
055
eeeeee
eee
====
=++
[ ]Te 110~1 =
0~~
2110
021
5521
2
=
e
j
j
j
or055)21( eeej =++
-
8/6/2019 ECE 550 Lecture Notes 1
88/181
88
let e23 = 1, then e22= -1 j2, e21 = -j2(-1 j2) = -4 +j2
and
Finally,
Theorem: LetA be an nxn constant matrix. ThenA is diagonalizable if and only if
there is a set of n linearly independent vectors, each of which is an eigenvector of
A.
Proof: IfA has n linearly independent eigenvectors e1, e2, , en, form the
nonsingular matrix T= [e1 e2 en].
23222322
22212221
232221
)21(0)21(
202
055)21(
ejeeje
ejeeje
eeej
+==+
==
=++
[ ]Tjje 12124~2 +=
[ ]Tjjee 12124)*~(~23
+==
Now, T-1AT = T-1[Ae1 Ae2 Aen] = T-1[1e1 2e2 nen]
-
8/6/2019 ECE 550 Lecture Notes 1
89/181
89
Now, TAT T [Ae1Ae2 Aen] T [1e1 2e2 nen]
= T-1[e1 e2 en]D = T-1TD = D
where D = diag [1, 2, , n], and i, i= 1, 2, , n are the eigenvalues ofA.
Conversely, suppose there exists a matrix Tsuch that T-1AT = D is diagonal. Then
AT = TD.
Let T= [t1 t2 tn], thenAT= [At1At2 Atn] = [t1d11 t2d22 tndnn] = TD Ati= diiti, which implies
that the ith column ofTis an eigenvector ofA associated with the eigenvalue dii.
Since Tis nonsingular, there are n linearly independent eigenvectors.
Now, ifA is diagonalizable, then eAt= TeDtT-1 because
( ) ( ) L++++== 3312211!3
1
!2
11tTDTtTDTtTDTIee tTDTAt
( )( ) ( )( )( )1 1 1 2 1 1 1 31 12! 3! I TDT t TDT TDT t TDT TDT TDT t = + + + +L
L++++= 3132121!3
1
!2
1tTTDtTTDtTDTI
2 2 3 3 1 11 12! 3!
DtT I Dt D t D t T Te T = + + + + = L
552
-
8/6/2019 ECE 550 Lecture Notes 1
90/181
90
Example: For the given matrix, compute eAt.
We already know that (A) = {-1, -1 -j2, -1 +j2}. Now,
The inverse ofTis
=
010
011
552
A
++
=
111
21211
24240
jj
jj
T
++=
2121121211
1022
8
11
jjjjT
Therefore,
-
8/6/2019 ECE 550 Lecture Notes 1
91/181
91
Therefore,
which implies that
Finally, eAt= TeDtT-1.
+
=2100
0210
001
j
jD
=
+
tj
tj
t
Dt
e
e
e
e
)21(
)21(
00
00
00
Proposition: SupposeD is a block diagonal matrix with square blocksDi, i = 1, 2, , n, i.e.,
-
8/6/2019 ECE 550 Lecture Notes 1
92/181
92
Then,
Example: For the sameA matrix of the previous example, compute eAt.
Let
=
nD
D
D
D
L
MOMM
L
00
0
00
2
1
=
tD
tD
tD
Dt
ne
e
e
e
L
MOM
M
L
00
0
00
2
1
[ ]
==
011
211
240
}Im{}Re{ 221 eeeT
then, 511
-
8/6/2019 ECE 550 Lecture Notes 1
93/181
93
and
which implies that
But,
Finally,
=
220
111
511
4
11T
=
==
2
11
0
0
120
210
001
D
DATTD
=
tD
tDDt
e
ee
2
1
0
0
==
tttteeee ttDttD
2cos2sin2sin2cosand 21
( )11
2cos2sin02sin2cos0
001
==T
ttttTeTeTe
tDtAt
Def. The impulse response matrix of a linear, lumped, time-varying system is a matrix map
-
8/6/2019 ECE 550 Lecture Notes 1
94/181
94
H(,) :RxR Rrxm given byH(t, ) = [h1(t, ), , hm(t, )], where each column hi(t, )
represents the response of the system to the impulsive input u(t) = (t - ) i, i Rm, i = [0 0 1 0 0]T (1 occurs as the ith component), is the time of application of theinput and tis the observation time.
Recall that ifH(t, ) 0 for any given t, and t < , then the system is noncausal. On the
other hand, ifH(t, ) = 0 fort < , then the system is causal.
In block diagram form,
Hence,
Consider the linear, time-varying system with state model
= dtHt )(),()( uy
0)(,)()()()()( =+= xuxx ttBttAt&
)()()()()( ttDttCt uxy +=
Theorem: The impulse response matrix for the above system is given by
-
8/6/2019 ECE 550 Lecture Notes 1
95/181
95
Proof: The response of the above time-varying system to an input u is given by
But,x(-) = 0, implies that
Let u(t) = (t - ) i, i=[0 0 1 0 0], where the 1 appears at the ith location, then fort
Now,
t. Thus, fortt
-
8/6/2019 ECE 550 Lecture Notes 1
96/181
96
andy(t) = 0, fort < .
Ifu(t) = (t - ) i, then
Hence,H(t, ) = C(t)(t, )B() +D(t)(t - ), t
= 0 t <
IfA(),B(), C() andD() are constant matrices, then
Consider again the time-invariant system state model
=t
dqqqtHt )(),()( uy
deg(A
()), we can solve forh() directly from , i.e.,
Let h() 0 + 1+ + n-1n-1, then if the eigenvalues ofA are distinct, the
js can be computed from the n linear equations
f(i) = q(i) A(i) + h(i) = h(i), i = 1, , n.
Example: Calculatef(A) =A10 + 3A with
=21
10A
The characteristic polynomial of A is A() = 2 + 2+ 1 = (+1)2 1 = 2 = -1.
-
8/6/2019 ECE 550 Lecture Notes 1
102/181
102
Let h() = 0 + 1. Then withf() = 10 + 3, we get
f(1) =f(-1) = (-1)10 + 3(-1) = -2 = 0 - 1.
But, f(2) =f(1) ! For the repeated eigenvalue case, the solution procedure is modified as
follows:
Let
Since deg(h()) n 1, the coefficientsj, j = 0, 1, , n 1, can now be obtained from
the following set of n equations:
f(l)(i) = h(l)(i), i = 0,1, , ni - 1; i = 1, 2, , m.
Going back to the previous example, n1 = 2 and
==
==m
i
i
m
i
n
iA nni
11
)()(
==+=+===
73)1(10310)( 91
9)1(
1 f 1
)1(
1
)(
==
h
We must solve the equations 0 - 1 = -2 and 1 = -7. This implies that 0 = -9.
M
-
8/6/2019 ECE 550 Lecture Notes 1
103/181
103
Moreover,
f(A) =A10
+3A = h(A) = 0I + 1A = -9I 7A =
Suppose again the eigenvalues ofA are distinct, then
where
and
Consequently, fort0
57
79
n
n
A s
R
s
R
s
R
s
sRAsI +++==
L2
2
1
11
)(
)()(
=
=++++=
n
i
inn
nn
A sasasass
1
1
1
1 )()( L
=
)(
)()(lim s
sRsR
A
i
si
i
{ } Atn
i
t
i
n
i i
i eeRs
RLAsIt i ==
==
==
11
111 )()(
L
Example: Consider the system . Obtain (t) using the partial fractionexpansion method with the system matrix A given by
)()( tAt xx =&
-
8/6/2019 ECE 550 Lecture Notes 1
104/181
104
expansion method with the system matrixA given by
Now,
and the characteristic polynomial ofA is
The residue matrices are found as follow:
=
3210A
+=
+
=
s
ssR
s
sAsI
2
13)(
32
1
))(()2)(1(23)det()( 212
=++=++== ssssssAsIsA
=
+
+=
+=
12
12
2
13
2
1
)(
)()1(
limlim 111 s
s
ss
sRsR
sAs
=
+
+=
+=
22
11
2
13
1
1
)(
)()2( limlim
222
s
s
ss
sRsR
sAs
The inverse ofsI-A is equal to
-
8/6/2019 ECE 550 Lecture Notes 1
105/181
105
and the state transition matrix of the system is
or
Suppose now that the matrixA contains repeated eigenvalues, then the adjoint
matrixR(s) and A(s) have common factors. Consider, for example, the matrix
2
22
11
1
12
12
)( 1
+
++
= ss
AsI
tt eet 2
22
11
12
12)(
+
=
++
=
tttt
tttt
eeee
eeeet
22
22
222
2)(
=1
1
1
0000
01
A
Then,11
2
1 010)(
sss
-
8/6/2019 ECE 550 Lecture Notes 1
106/181
106
We know from the Cayley-Hamilton theorem that ifA() is the characteristic
polynomial of the nxn matrixA, then A(A) = 0.
Def. A polynomialp() such thatp(A) = 0 is called an annihilating polynomial of
the matrixA.
Def. The monic polynomial of least degree which annihilates the matrixA is called
the minimal polynomial ofA and is denoted by A().
Supposeg() is a polynomial of arbitrary degree, thenp() =g()A() is also anannihilating polynomial ofA.
Theorem: For every nxn matrixA, the minimal polynomial A() divides the
characteristic polynomial A(). Moreover, A() = 0 if and only ifis aneigenvalue ofA, so that every root ofA() = 0 is a root ofA() = 0.
2
1
1
1
3
1
21
2
1
1
)(
00
00
)(
)(00
0)(0
)(
)()(
=
== s
s
s
s
s
s
s
sRAsI
A
Proof: IfA() annihilatesA and ifA() is a monic polynomial of minimum
degree that annihilatesA, then deg (A()) deg(A()).
-
8/6/2019 ECE 550 Lecture Notes 1
107/181
107
degree that annihilates , then deg (A()) deg(A()).
By the Euclidean algorithm there exists polynomials h() and r() such thatA() = A()h()+ r() and deg(r()) < deg(A())
But, 0 = A(A) = A(A)h(A) + r(A) = 0h(A) + r(A) r(A) = 0.
However, deg(r()) < deg(A()), and by definition A() is the polynomial of
minimum degree such that A(A) = 0 r() 0 A() divides A().
This result implies that every root ofA() = 0 is a root ofA() = 0 and hence
every root ofA() = 0 is an eigenvalue ofA.
If (A) and ifx0 is its corresponding eigenvector, thenAx= x and
0 = A(A)x= A()x A() = 0.
IfA has repeated eigenvalues 1, 2, , , i j, ij, i, j = 1, 2, , , then for
m1+m2++mn the minimal polynomial A() has the structure
mmm
A )()()()(21
21 = L
Theorem: LetA Rnxn, then
-
8/6/2019 ECE 550 Lecture Notes 1
108/181
108
where
In this particular case, fort0 the state transition matrix is given by
This is true because
= =
===
1 1
1
)()(
)(
)(
)()(
i
m
jj
i
j
i
AA
i
s
R
s
sR
s
sRAsI
=
1)()()!(
1lim AsIsds
d
jmR i
i
i
i
m
ijm
jm
si
j
i
= =
=
1 1
1
)!1(
)(i
m
j
tj
j
i
i
ie
j
tRt
= = = =
=
=
=
1 1 1 1
11
11
)!1()(
1
}){()(
i
m
j i
m
j
tj
j
ij
i
j
i
i i
iej
tR
sR
AsIt
L
L
Example: Consider a dynamic system with theA matrix
-
8/6/2019 ECE 550 Lecture Notes 1
109/181
109
Then
Using the Faddeev-Leverrier algorithm, we get
N1 =I
N2 =N1A + a1I=
N3 = N2A + a2I=
=
452
100
010
A
2,5,4
254)2()1()det()(
321
232
===
+++=++==
aaa
sssssAsIsA
052
140
014
020
002
145
So, R(s) =N1s2 + N2s + N3 and
)(R
-
8/6/2019 ECE 550 Lecture Notes 1
110/181
110
In this case, the minimal polynomial is the same as the characteristic polynomial,
i.e., A(s) = A(s) =s3 + 4s2 +5s + 2.
The inverse of sI A is
where the residue matrices are
)2()1(
)()(
2
1
++=
ss
sRAsI
2)1(1)(
1
2
2
2
1
1
11
++
++
+=
s
R
s
R
s
RAsI
3232
2
1
12
1
1
1 232
)()1(!1
1limlim NNIs
NsNIs
ds
dAsIs
ds
dR
ss
+=
+++
=
+=
=
384
252
120
++132
2 NsNIs
-
8/6/2019 ECE 550 Lecture Notes 1
111/181
111
Therefore, fort0, the state transition matrix is given by
Consider now the following block diagonalA matrix
Then, its characteristic polynomial is the same as that of the last example, i.e.,
=+=
+
++=
132
132
2
3232
1
2
1 lim NNIs
NsNIsR
s
=+=
+
++=
484
242
121
24
)1(322
32
2
2
1
2 lim NNIs
NsNIsR
s
tttAt
eRteReRte
21
2
2
1
1
1)(
++==
=200
010
011
A
)2()1()()( 2 ++== ssss AA
In this case,
tt tee 0
-
8/6/2019 ECE 550 Lecture Notes 1
112/181
112
But,
provided that a nonsingularTcan be constructed
Suppose that
where
=
t
ttA
e
ee2
00
00
11 == TTeeTATA tAAt
=
PJ
J
J
J
LL
MOM
M
0
0
000
2
1
iixnn
i
i
i
i
i JJ
= ,
01
10001
LLLOM
MOOM
ML
then
tJe 0001
-
8/6/2019 ECE 550 Lecture Notes 1
113/181
113
where
In this case, matrix is said to be in the Jordan canonical form.
LetA have eigenvalues 1, 2, , p each with multiplicity ni, i = 1, ,p,
n1 + n2++ np = n. SupposeA hasp independent eigenvectors
associated with the eigenvalues 1, 2, , p.
=tJ
tJ
Jt
Pe
e
e
LL
MOM
M
0
0 2
=
t
t
t
i
ntt
tJ
i
i
i
i
ii
i
e
e
en
ttee
e
00
0
)!1(
1
LMOM
M
L
11
2
1
1 ...,,, peee
Then the set of eigenvectors generated by{ }11 11 1,..., ,..., ,..., pnn
p pe e e e
-
8/6/2019 ECE 550 Lecture Notes 1
114/181
114
i = 1, 2, ,p forms a basis.
Theorem: The generalized eigenvectors ofA associated
with the eigenvalues {1,, p} each with multiplicity ni, i = 1, 2, ,p, are
linearly independent.
Example: Let . We already know that (A) = {-1, -1, -2}.
{ 11 11 1,..., ,..., ,..., pnn
p pe e e e
1
23
12
1
)(
)(
)(
0)(
=
=
==
ii n
i
n
ii
iii
iii
ii
IA
IA
IA
IA
ee
ee
ee
e
M
=
452
100
010
A
Clearly, n1= 2 and n2 = 1. Moreover,
-
8/6/2019 ECE 550 Lecture Notes 1
115/181
115
Clearly, are two linearly independent eigenvectors.
Furthermore,
and implies that the three eigenvectors are linearly independent
Let us construct the similarity transformation Tas follows:
==
=
1
1
1
0
352
110
011
)( 111
13
1
12
1
11
1
11 ee
e
e
e
IA
==
=
4
21
0
252
120012
)( 121
23
1
22
1
211
22 ee
e
ee
IA
1 11 2ande e
==
1
0
1
)( 21
1
1
2
12
eeeIA
[ ] 1det 122111 =eee
[ ]2
1
1
1
1
2 eee=T
In other words,
012
111
T
-
8/6/2019 ECE 550 Lecture Notes 1
116/181
116
The new system matrix, in Jordan canonical form is given by
The matrix exponential of the equivalent system is
=
114
012T
JATTA =
==
100
110002 1
==
t
tt
t
JTtA
e
tee
e
ee
00
0
002
The matrix exponential of the original system is therefore given by
-
8/6/2019 ECE 550 Lecture Notes 1
117/181
117
Discrete-Time Systems:
Consider the linear time-invariant discrete-time system
Taking the one-sided Z transform, yields
The state transition matrix is given by (k) =Ak=Z-1{z(zI-A)-1}.
The transfer function matrix of a discrete-time linear dynamic system is defined by
2
1
1 1 1 0 0 1 2 1
2 1 0 0 2 5 2
4 1 1 0 0 2 3 1
t
At J t t t
t
e
e Te T e te
e
= =
)0(,)()()1( 0 xxuxx =+=+ kBkAk
)()()( kDkCk uxy +=
1 1
0
1 10
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
z z zI A zI A B z
z zC zI A C zI A B D z
= +
= + +
X x U
y x U
DBAzICzH += 1)()(
On the other hand, the unit sample response matrix is then given by
h(k) Z 1{H( )}
-
8/6/2019 ECE 550 Lecture Notes 1
118/181
118
h(k) =Z-1{H(z)}.
Def. MRnxn is symmetric ifMT= M.
Theorem: The eigenvalues ofM = MTRnxn are real.
Proof: Let be an eigenvalue ofMand v its eigenvector. Then Mv = v. Now, if
v*is the complex conjugate transpose ofv,
v*Mv = v*(v) = (v*v)
But, v*(Mv) and v*v are real must be real, all eigenvalues ofMmust be
real. This can be verified from the fact that
(v*Mv)* = (Mv)*v = v*M*v = v*MTv = v*Mv.
Theorem: Let M = MTRnxn. Then there exists an orthogonal matrix
Q = [q1 q2 ...qn ] such that M = QDQTorD = QTMQ, whereD is a diagonal matrix
constructed from the eigenvalues ofM, qi , i = 1, 2 , n is the normalized version
of eigenvectorvi associated with the eigenvalue i ofM, i = 1, 2 , n.
Theorem: A matrix M= MTRnxn is positive definite (positive semi-definite) if and
onl if
-
8/6/2019 ECE 550 Lecture Notes 1
119/181
119
only if
a) Every eigenvalue ofMis positive (zero or positive).
b) All leading principal minors ofMare positive (all principal minors ofMare zero
or positive).
c) There exists an nxn nonsingular matrixN(an nxn singular matrixNor an mxn,
m < n matrixN) such that M = NTN.
We denote positive definiteness (semi-definiteness) by M> 0 ifxTMx> 0 (M 0 if
xTMx0 ) x 0.
Example: Consider the following 2x2 matrix M:
then MT= M, {1, 2} = {4, 2}. The corresponding eigenvectors are:
= 31
13M
= 1
1,
1
1},{ 21 vv
The normalized eigenvectors are given by
11
-
8/6/2019 ECE 550 Lecture Notes 1
120/181
120
Therefore, the Q andD matrices are given by
Singular value decomposition (SVD)
LetHRmxn
and define MHT
HRnxn
. Then M = MT
0. Let rbe the totalnumber of positive eigenvalues ofM, then we may arrange them such that
Letp = min{m, n}, then the set {1
2
r> 0 = r+1 = = p} is calledthe singular values ofH, where and r = rank(H).
Example: Let a rectangular matrixHbe given by
=
21
21
21
21
21,},{ qq
=
21
21
2
1
2
1
Q
= 20
04D
1 2 10r r n + > = = =L L
= 4221
12
H
i i =
Then
==89
HHM T
-
8/6/2019 ECE 550 Lecture Notes 1
121/181
121
Now, det(I M) = 2 - 30+ 125 eigenvalues (M) = {25, 5} and the singular
values ofHare the square root of the eigenvalues ofM, i.e., {5, 5}.
Example: LetHnow be described by
Then
and
218
HHM
=
120
004H
==
120
240
0016
HHM T
)5)(16(
120
240
0016
det)det( =
= MI
which implies that the set of eigenvalues ofMis {16, 5, 0} singular values ofH
are {4 5} since min{m n} = min{2 3} = 2 Also rank(H) = 2
-
8/6/2019 ECE 550 Lecture Notes 1
122/181
122
are {4,5}, since min{m, n} = min{2, 3} = 2. Also, rank(H) = 2.
Theorem: LetH Rmxn, thenH = RSQTwithRTR = RRT=Im, QTQ = QQT= In,
and SRmxn with the singular values ofHon its main diagonal and such that
QTHTHQ = D = STSwithD a diagonal matrix with the squared singular values of
Hon its main diagonal.
Example: LetHbe given by
then the eigenvalues ofM = HTH {16, 5, 0} give rise to the normalized
eigenvectors
=
120
004H
[ ]T
q 001~
1 =[ ]Tq
51
52
2 0~ =
[ ]Tq5
25
13 0
~ =
Thus,
[ ]
==5
15
2321 0
001~~~ qqqQ
-
8/6/2019 ECE 550 Lecture Notes 1
123/181
123
Stability of Dynamic SystemsDynamic system stability is a very important property. It enables the tracking of
desired signals or the suppression of undesired signals. System stability is
described either in terms of input-output stability or in terms of internal stability.
[ ]
5251
55321
0
0qqqQ
=
=
==
00
00
050
004
0
0
001
120
004
2
1
52
51
51
52
HQS
2
1
2
22
3
4 0 16 0 0 0 04 0 0
0 5 0 5 0 0 00 5 00 0 0 0 0 0 0
T
S S
= = =
Input-output Stability:
-
8/6/2019 ECE 550 Lecture Notes 1
124/181
124
A single input, single output (SISO) linear, time-invariant (LTI), continuous time
dynamic system is bounded-input, bounded-output (BIBO) stable if and only if its
impulse response h(t) is absolutely integrable, i.e.,
where Mis a real constant.
Proof: Let the input u(t) be bounded, i.e., |u(t)| k1 < , t 0. Then
y(t) is bounded.
Suppose h(t) is not absolutely integrable. Then for a causal, linear time-invariant
system, with u(t) = k1 > 0 and h(t) > 0, t 0, with nondecreasing envelope.
-
8/6/2019 ECE 550 Lecture Notes 1
125/181
125
Fort 0 , this implies that
as t ,y(t) is not bounded even when u(t) is bounded. Thus, h(t) must be absolutely
integrable.
Theorem: A SISO LTI, continuous-time dynamic system is BIBO stable if and
only if every pole of its transfer functionH(s) lies on the left-half of thes-plane.
Proof: LetH(s) be a proper rational function ofs, then if every pole located at
s = - pi, pi > 0, has multiplicity ni, such that
1
0
( ) ( )t
y t k h d =
0
( )
t
h d
nnm
i
i ==1
we get
+=m n
j
iji
ps
ksH
)()(
-
8/6/2019 ECE 550 Lecture Notes 1
126/181
126
and the impulse response is given by,
t 0, which is absolutely integrable.
Consider a multiple-input, multiple-output (MIMO), LTI, continuous-time dynamic
system described by the impulse response matrixH(t) = [hij(t)]. Such a system isBIBO stable if and only if i, j,
Alternatively, a MIMO, LTI, continuous-time dynamic system described by the
proper rational transfer function matrixH(s) =L{H(t)} = [Hij(s)] is BIBO stable if
and only if every pole ofHij(s) is located on the left half of thes-plane.
= = +i j
j
ips1 1 )(
{ } = =
= =
=
+==
m
i
n
j
tpjijm
i
n
jj
i
ij
i
i
i
etj
k
psLksHLth
1 1
1
1 1
11
)!1()(
1)()(
0
( )ij ijh t dt K
= <
As we already know, the solution of the state equation is given byt
-
8/6/2019 ECE 550 Lecture Notes 1
127/181
127
Moreover, in the s-domain we get
Suppose that the input is identically zero and the initial state is nonzero, i.e.,
and
then
and
LetHin(s) (sI - A)-1be the internal transfer function matrix of some continuous
time LTI dynamic system. Then, with u(t) = 0 and for some
+= tAAt duBexetx0
)( )(~)0(~)(~
)(~
)()0(~)()(~ 11
sUBAsIxAsIsX
+=
0~
)(~
0~
)(~ == sUtu or
0~)0(~ x
)0(~)()(~ 1xAsIsX =
)0(~)(~ xetx tA=
-
8/6/2019 ECE 550 Lecture Notes 1
128/181
128
and
1. The unforced system is marginally stable if and only if the poles ofHin(s) (or the
eigenvalues ofA) have either zero or negative real parts, and those with zero real
parts are simple roots of the minimal polynomial ofA
2. The unforced system is asymptotically stable if and only if all the poles ofHin(s)
(all eigenvalues ofA) lie strictly on the left half of thes-plane.
Asymptotic stability also implies that
Observation: These two concepts deal with internal stability only.
Example: Let an unforced dynamic system be described by
0~
)(~lim =
txt
)(~
2
2)(~
21
21
txtx
=&
then
+++
)()()( 4
5
21
45
21
ssss
s
H
-
8/6/2019 ECE 550 Lecture Notes 1
129/181
129
the poles ofHin(s) are located ats = 0 ands = -5/4 system is marginallystable.
Suppose now that the input stimulus is nonzero and that the initial condition is
zero, i.e., and
Then
and
Furthermore,
+++
=
)(2
)(2
)()()(
45
45
44
sss
ss
sHin
0~
)0(~ =x .0~
)(~ tu
)(~
)()(~ 1 sUBAsIsX =
=t
tA duBetx0
)( )(~)(~
[ ] )(~)()(~)()(~ 1 sUsHsUDBAsICsY =+=
Clearly, every pole ofH(s) is an eigenvalue ofA if every eigenvalue ofA has a
negative real part then all poles of H(s) lie on the left half of the s plane the
-
8/6/2019 ECE 550 Lecture Notes 1
130/181
130
negative real part, then all poles ofH(s) lie on the left-half of t