Dynamic Sensor Networks for Environmental Monitoring · Overview Wireless sensor nets evolution...
45
Dynamic Sensor Networks for Environmental Monitoring Paul Flikkema Northern Arizona University 20 June 2006
Transcript of Dynamic Sensor Networks for Environmental Monitoring · Overview Wireless sensor nets evolution...

Dynamic Sensor Networksfor
Environmental Monitoring
Paul Flikkema
Northern Arizona University
20 June 2006
Acknowledgements
CollaboratorsJim ClarkBiology/Center on Global Change, Duke UniversityBruce HungateBiological Sciences, NAUGeorge KochBiological Sciences, NAUMario Montes-HeluBiological Sciences, NAUSteve SillettBiological Sciences, Humboldt State UniversityAmy WhippleMerriam-Powell Center for Environmental Research, NAUZijiang YangElectrical Engineering, NAU
Current StudentsMark Boissevain Rob ConantMichelle Hersh Ola Iranloye Dan Johnson Alan McBride Bill Ruggeri Nathan Welch Kun Xia
Former StudentsAnna Deem Curtis Fisher Myron Lee James Brandon Short Brent West Michael Wright
Thanks toNAU Merriam-Power Center
for Environmental ResearchUS National Science FoundationUS National Park ServiceThe Arboretum at Flagstaff

Overview
Wireless sensor netsevolution toward diverse, application-dependent deployment densities and node capabilitiesa new technology for measuring environmentsmotivating application: revolutionize understanding of environmental change
Project aimforecast how altered climate and CO2 will impact biodiversity and carbon storage in the biosphere
Approach: dynamic sensor networksDeeply embedded distributed intelligence for model inference and prediction

Outline
Sensor net design and implementationNode and software design
Dynamic sensor networksAlgorithms and software
Data service layerModel-driven controlResearch challenges
Concluding remarks

Requirements –Environmental Sensing
Minimal invasivenessLong battery life
Aggressive energy managementTarget: > 12 months
Scientific accuracySupport of a broad spectrum of probesSupport transparent incremental deployment
Scalable in network size and densityEase of installation and maintenanceSupport of internet connectivity via
Terrestrial (cellular)Satellite
Rugged, weatherproof packagingLow life cycle cost

Concept
Gateway(NetworkInterface)
UserCommunity
SatelliteLink
Multi-hopNetworking
Dense array of energy-efficient
sensors

Modular hardware designDual-processor architectureThree-board stack
Gateway nodes will use memory/time board in place of sensor data acquisition board
Brain
Probe dataacquistion
Radio
2nd Generation WiSARD

G2 WiSARDNet DesignCommunication and Networking
902 – 928 MHz ISM bandNon-Coherent Binary FSK (NC-BFSK) modulationSlow time/frequency hopping spread spectrum via pseudo-random number generatorCRMA radio channel sharing algorithm
Distributed controlLocal informationScalable
Power ManagementMonitor power statusReport battery voltageAdjustable radio transmit power (under development)
SchedulerDynamic scheduling of communicationOnline-configurable sample rate (under development)
User InterfaceCommand line from PCUser selection of ID, sample ratesOn-line diagnostics
Self OrganizationPeriodic search for new nodesOn-demand search for lost nodes (under development)Can add, move, or delete nodes

G2 WiSARD Capabilities
Built-in probe interfaces12-bit A/D conversion4 temperature channels
thermocouple4 light (PAR) channels
photodiode2 general purpose probe channels, two power outputs and two CCP modules (Capture/Compare/PWM)
Soil moistureDecagon Ech2oprobe
Serial communication withintelligent probesSap flow (future)
Interface for multiple additional intelligent probesOne-wire bus
Provision for external energy suppliesSupports autonomous switching between internal and external energy sourcesBattery-backed solar

Micro-Controller
PIC18F8720
PowerMgmt
MemorySRAMFLASH/FRAM
SPI+
SystemTime
BrainsBoard
Trans-ceiver Micro-
ControllerPIC18F452
RadioBoard Sensor
Board
AnalogI/O
1-W
ire
Tem
p(4)
Gen
eral
Purp
ose(
2)
Ligh
t(4)
PWM(2)
Pwr(2)
G2 WiSARD Functional H/W Design
Ext Power
Int Power Enclosure

MAC Algorithms for Wireless Sensor Nets
Wireless ad-hoc networks are unique:Global information is expensive
Algorithms should be distributed
Nodes have limited energy suppliesUnreliable links & shared, distributed channelsTopologies may be dynamic (e.g., mobile nodes)

Go after the biggest problem first
Energy is very limitedSolar too expensive and unreliable
Where is the most energy consumed?Transmission and reception of one bitconsumes approx. 6x104 times the energy required for execution of one microcontroller instructionDon’t communicate unless you really need to

MAC Layer Characteristics
Handling contention/collisions:Avoidance: deterministic algorithms, assign resourcesResolution: random algorithms, recovery strategies
Key tradeoff: proactive vs. reactive coordinationProactive coordination implies less contention, better energy efficiency (e.g. reservation TDMA)
But efficiency drops when topology is dynamicMay not scale well
Reactive mechanisms offer simplicity and poor energy efficiency (e.g., ALOHA)

Energy vs. Bandwidth Efficiency
Each application has unique set of characteristics that drive the MAC designIn general, in wireless sensor networks with low information rates, we aggressively trade bandwidth for energy efficiencyLarge amount of excess bandwidth allows randomized accessLow topology dynamics allows for energy efficiency via proactive coordination

Why Use a (Pseudo) Randomized Access Algorithm?
Allows local (one-hop) proactive coordination where contention/interference are criticalInterference from the rest of the net is made noise-like; implies good scalabilityAdmits exploitation of node’s communication resourcesProvides robustness to external interference and channel fading

CRMA Protocol
Time slotted into frames; frames divided into slotsProactive coordination:
Node cycles through cliquesNode contacts members of the clique; they cooperate to share a common package of information:
1) A pseudo-random number generator (PRNG)2) A seed3) A start-of-first-frame time
Operation: clique members update their common PRNG’s each frame, agreeing on future frame slot allocations

CRMA FeaturesCliques – a node’s cliques are subsets of its sets of one-hop neighbors
Includes unicast and multicast subsetsGeneralizes notion of links
Cleanly exploits multiple and multi-channel radiosLocally deterministic/globally random hopping among a set of orthogonal time/frequency/code channels
Predictive conflict resolutionNodes can predict and resolve collisions between cliques they belong to

Trial Deployment, April 2005: Grasslands site,C. Hart Merriam Elevational Gradient
Microburst andbrief cloud cover
Data from One Site
Data from All Sites

A few lessons learned so far…
Packaging is a challengeWeatherproofing vs. probe interfaces
Probe costs are significantProbeset costs will exceed sensor node costs
Deployment is time-consuming3D spaceTruly “embedded” probes
Requirements for deployment will vary by siteData correlation radii vs. transmission rangeMaintenance and QA
Probe models in non-stationary environments

Dynamic Sensing of Ecosystem Processes
motivating application: revolutionize understanding of environmental change
forecast how altered climate and CO2 will impact biodiversity and carbon storage in the biosphere
challenge: endow network with sufficient explanatory power under significant energy consumption constraintstight coupling between the sensed and the sensors
sensors are even more deeply embedded in their environmentsonly sense and communicate when you need to
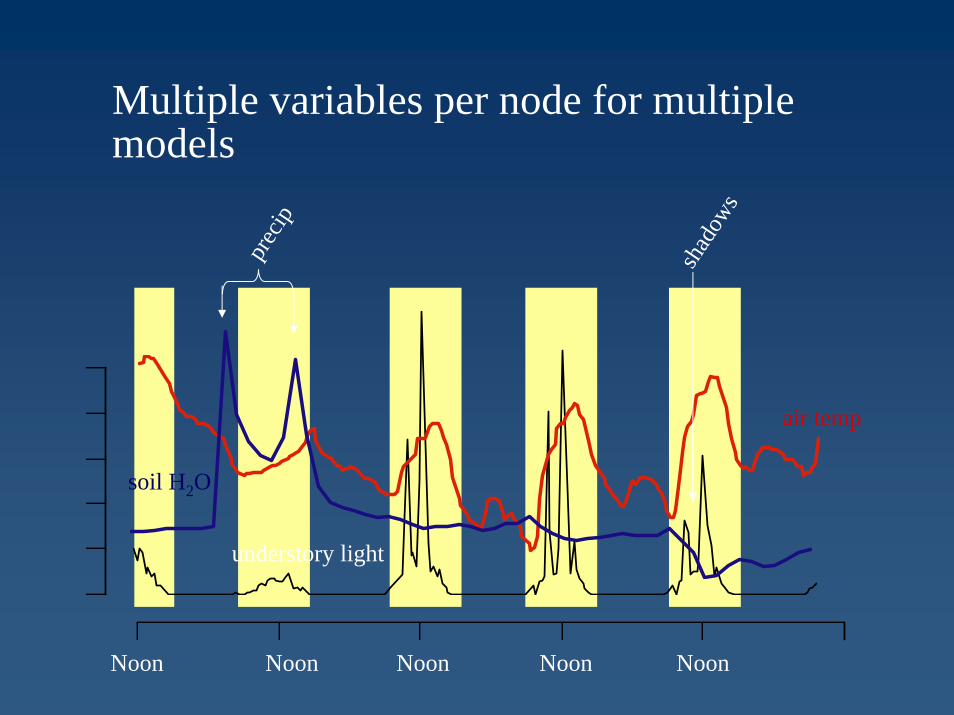
shad
ows
Noon Noon Noon Noon Noon
air temp
soil H2O
understory light
prec
ip
Multiple variables per node for multiple models

Application Properties
data is highly heterogeneous: natural scales range frommeters to landscapesseconds to years
systems are strongly non-linear and non-stationarymotivates dynamic model-driven control of
samplingcommunicationestimation and predictionmodel inference
according to their relative values and costs:
integrate spatio-temporal sensing with modeling and prediction in an adaptive framework

Architectural Properties1. limited in-network resources2. complementary out-of-network capability
relaxed energy constraintsmassive processing powerlatency
approachadaptive in-network joint estimation and coding(inner, fast control loop)supervisory out-of-network processing(outer, slow control loop) – model inference

Dynamic Sensor Networks: Components of Control
models and decisions
out-of-network
in-network
SLIP: scalable
landscape inference
and prediction
DONC: dynamic
out-of-network
control
Dynamic sampling
and reporting
DINC: dynamic
in-network
control
NIP: network
inference and
predictionscheduling
data
data, real-time
estimates,
uncertainty
pre-
dictions
data

Model-driven sensor network activity
Modeling effortModel, measure, and control uncertainty as a function of cost
Hierarchical BayesMCMC
Data service component implementationcoordinates the execution and adaptation of sub-plans and their interaction with WiSARDNet sensors and communication layertags data with meta-data about sampling and measurement conditionsprovides multi-resolution data storage within the network

Energy
Fide
lity
Model-driven measures
Easy
Where to be
Goal: maximum predictive power at ecological model level for a given energy cost
Model-DrivenDynamic Optimization:In- and Out-of-Network
Control of Sampling and Reporting

Precision and Energy Cost of Snapshot Estimates
Objectives:What are the performance and energy cost of samplingand estimating a correlated random field with a sensornetwork as a function of spatial resolution?If subsampling, does a hierarchical strategy for reportingdata pay off?Are there reasonably good distributed strategies forsubsampling and reporting?
Plan:Subsampled instantaneous snapshot of second-orderrandom fieldNoisy measurementsMinimum-variance estimateAssume communication is dominant cost

Central Issues and Related Work
Coding
Slepian-WolfJoint source-channel codingCoding, routing, and rate allocation
Field Models: random or deterministicSpatial approaches
Multi-resolution models
Communication channel models

Field Model
Collection of sensors i , i = 1, . . . , N; samples of a spatialprocess {xi}N
i=1 ∼ Σx
Snapshot {xi : i ∈ A} sent to central server......according to A → A = diag(a), where
ai =
{1, sample xi is reported;0, otherwise.
measurement noise ni ∼ Σ
Snapshot iss = Ax + n
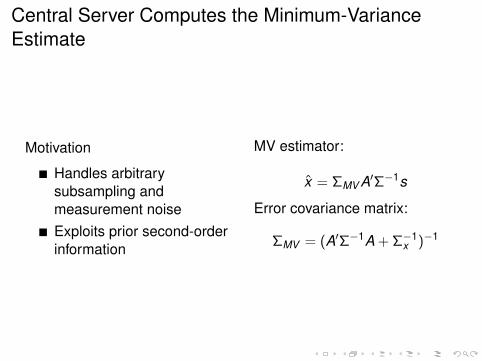
Central Server Computes the Minimum-VarianceEstimate
Motivation
Handles arbitrarysubsampling andmeasurement noiseExploits prior second-orderinformation
MV estimator:
x̂ = ΣMV A′Σ−1s
Error covariance matrix:
ΣMV = (A′Σ−1A + Σ−1x )−1

Use a Uniform Grid for Convenience
N sensors in√
N ×√
Ngridinter-sensor distance don each axisN = 4L
sample at 4l sensorswhere log resolutionis l = 0, . . . , LBase log resolution(no subsampling) isl = L

Precision Improves with Resolution and/or Correlation
100
101
102
103
0
510
1520
0
5
10
15
# of reporting sensorscorrelation radius
prior datauncertainty:
Σx(i , j) = e−d(i,j)
α
correlationradius: minimumcorrelation of 0.1measurementnoise σ2 = 1/4

Multi-resolution Sampling: Maximum-Sleep ReportingRouting follows Sampling Hierarchy.
Only the sensors that sample communicate.Each sensor at level l sends its information to the nearestsensor at level l − 1.If sampling is performed at level l , 0 ≤ l < log4 N, theincremental reporting cost is
γl = 4l
(√N
2l+1
√2d
)β
; γL =
(N −
L−1∑l=1
4l
)dβ
Total reporting cost for sampling at level l :
Γl =l∑
m=1
γm
Multi-resolution Sampling: Multihop Reporting
All sensors can forward the samples to the serverShortest path routing
1 < K = 4l ≤ N reporting sensors
1√θ
=√
NK : normalized spatial sampling interval (# hops/node)
Reporting cost is upper-bounded by
1√θ
Kdβ =√
KNdβ

Propagation Loss has Critical Effect on Reporting Cost
0 50 100 150 200 2500
500
1000
1500
# of reporting sensors
repo
rtin
g co
st
β = propagation lossexponent
O β = 3� β = 2+ β = 1

A Note on EfficiencyRatio of Precision to Reporting Cost.
Per-sensor energy usage is√
KN/N =√
θ.
When data is uncorrelated and σ2x � σ2, per-sensor precision is
(σ̄MV )−1 ≈ 1(1− θ)σ2
x
. . .maximum efficiency as θ → 1.

PROSEProtocol for Randomized Opportunistic Sampling and Estimation
Motivation
Desire a simple, scalable, and robust algorithm forsampling and reportingCase where sampling is inexpensive relative to reporting
Core Ideas
Sensors make independent random two-step decisions:
1 To sample and originate a report to the central server2 If not an originator, whether to sample in hopes of being on
the route to the server for opportunistic aggregation
Centralized oracle propagates decision parameters tosensorsAt each node, next edge is chosen randomly from edgeson shortest-path routes

Sensor nodes make independent, random decisions
λ: probability that a sensorwill sample and originate areport to the central server
sets an averageminimum number ofsamples for the estimate
µ: probability that a sensorwill be opportunistic giventhat it decides not tosample and originate
select to balance benefitand cost of providingadditional samples forthe estimate
λ
µ Sample andoriginate
Sample andopportunisticallyaggregate
Forward
0
0
1
1

PROSE Exploits Low-Cost SamplesMonte-Carlo simulation: sensors select next destination randomly from those onshortest paths to central server.
0 50 100 150 200 2501
2
3
4
5
6
7
# of originating sensors
prec
isio
n
� PROSE µ = 1× PROSE µ = 0
MR sampling shownas a solid line
Correlation radius = 5(for a minimumcorrelation of 0.1)

Summary
Framework admits comparison of subsamplingapproaches in realistic scenariosRealistic cost models are essentialReasonable distributed algorithms for sampling andreporting seem attainable
OutlookRole of randomized algorithms and inter-sensorcollaborationSpatio-temporal modelsModel inference

Working at the right level…Example: multi-sensor time series of temperature.
Can view asstreams of numbers
use general-purpose source codes (e.g., delta modulation) correlated spatio-temporal process
use a parameterized statistical model to drive adaptive space-time sampling and reporting
high-level model inputsampling driven by the needs of, e.g., leaf efficiency/tree growth model; sampling rate may be high because of sensitivity of high-level model, even when dynamics appear slow

energy-constrained inference in sensor nets
fidel
ity
power consumption density (W/m2)
spatial granularity limit
slope = pwr densityefficiency limit
Effect ofscalability req’t?

Algorithmic Challenges
Finding good models totrade fidelity (including latency) and costExplore power of dynamic algorithms
Cross-layer run-time optimization frameworkMultiple applicationsData services
Multi-resolution storage and communicationOSNetworking

ConclusionCan a dynamic sensor network deliver better results than fixed sampling and out-of-network modeling in the context of changing real-world environmental conditions?
Understanding the biodiversity and carbon consequences of environmental change is a problem broad enough to encompass many of the types of challenges faced by DDDA systems.
Results from these experiments will inform the design of accurate and energy-efficient production networks tailored to specific applications.
Micrometeorological sensing and nowcasting, pollution monitoring and environmental remediation, and public security/safety.

Questionsand
Discussion…