Device “FLiDAR 6M” Offshore - AXYS...
34
AXYS FLIDAR 6M (WINDSENTINEL), S/N 6NB00160 FLOATING LIDAR DEVICE VALIDATION AT FINO1 Independant Assessment of an AXYS FLiDAR 6M (WindSentinel) Floating Lidar Device “FLiDAR 6M” Offshore Validation at the FINO1 Offshore Platform, German North Sea Sector AXYS Technologies Inc. Report No.: GLGH-4257 15 13316-R-0001, Rev. D Date: 2016-06-03
Transcript of Device “FLiDAR 6M” Offshore - AXYS...

AXYS FLIDAR 6M (WINDSENTINEL), S/N 6NB00160 FLOATING
LIDAR DEVICE VALIDATION AT FINO1
Independant Assessment of
an AXYS FLiDAR 6M
(WindSentinel) Floating Lidar Device “FLiDAR 6M” Offshore
Validation at the FINO1 Offshore Platform, German
North Sea Sector AXYS Technologies Inc.
Report No.: GLGH-4257 15 13316-R-0001, Rev. D
Date: 2016-06-03

GL Garrad Hassan Deutschland GmbH
IMPORTANT NOTICE AND DISCLAIMER
1. This document is intended for the sole use of the Client as detailed on the front page of this document to whom the document is addressed and who has entered into a written agreement with the DNV GL entity issuing this document (“DNV GL”). To the extent permitted by law, neither DNV GL nor any group company (the "Group") assumes any responsibility whether in contract, tort including without limitation
negligence, or otherwise howsoever, to third parties (being persons other than the Client), and no company in the Group other than DNV GL shall be liable for any loss or damage whatsoever suffered by virtue of any act, omission or default (whether arising by negligence or otherwise) by DNV GL, the Group or any of its or their servants, subcontractors or agents. This document must be read in its entirety and is subject to any assumptions and qualifications expressed therein as well as in any other relevant communications in connection with it. This document may contain detailed technical data which is intended for use only by persons possessing requisite expertise in its subject matter.
2. This document is protected by copyright and may only be reproduced and circulated in accordance with the
Document Classification and associated conditions stipulated or referred to in this document and/or in DNV GL’s written agreement with the Client. No part of this document may be disclosed in any public offering memorandum, prospectus or stock exchange listing, circular or announcement without the express and prior written consent of DNV GL. A Document Classification permitting the Client to redistribute this document shall not thereby imply that DNV GL has any liability to any recipient other than the Client.
3. This document has been produced from information relating to dates and periods referred to in this
document. This document does not imply that any information is not subject to change. Except and to the extent that checking or verification of information or data is expressly agreed within the written scope of its services, DNV GL shall not be responsible in any way in connection with erroneous information or data provided to it by the Client or any third party, or for the effects of any such erroneous information or data whether or not contained or referred to in this document.
4. Any wind or energy forecasts estimates or predictions are subject to factors not all of which are within the
scope of the probability and uncertainties contained or referred to in this document and nothing in this document guarantees any particular wind speed or energy output.
KEY TO DOCUMENT CLASSIFICATION
Strictly Confidential : For disclosure only to named individuals within the Client’s organisation.
Private and Confidential : For disclosure only to individuals directly concerned with the subject matter of the document within the Client’s organisation.
Commercial in Confidence : Not to be disclosed outside the Client’s organisation.
DNV GL only : Not to be disclosed to non-DNV GL staff
Client’s Discretion :
Distribution for information only at the discretion of the Client (subject to the above Important Notice and Disclaimer and the terms of DNV GL’s written agreement with the Client).
Published : Available for information only to the general public (subject to the above Important Notice and Disclaimer).

GL Garrad Hassan Deutschland GmbH
Project name: AXYS FLiDAR 6M (WindSentinel), S/N 6NB00160
Floating Lidar Device Validation at FINO1
DNV GL / GL Garrad Hassan
Deutschland GmbH
Section Offshore Germany
Brooktorkai 18
20457 Hamburg
Germany
Tel: +49 40 36149 8693
DE 118 606 038
Report title: Independant Assessment of an AXYS FLiDAR 6M
(WindSentinel) Floating Lidar Device “FLiDAR 6M”
Offshore Validation at the FINO1 Offshore
Platform, German North Sea Sector
Customer: AXYS Technologies Inc., Sidney, Canada
Contact person: Breanne Gellatly
Date of issue: 2016-06-03
Project No.: 4257 15 13316
Report No.: GLGH-4257 15 13316-R-0001, Rev. D
Task and objective: 3rd Party Data analysis and reporting of an offshore validation of an AXYS FLiDAR 6M
Floating Lidar Device – carrying two ZephIR 300 Lidar devices – at the FINO1 Offshore Met Tower, in
German North Sea waters.
Prepared by: Verified by: Approved by:
D.Stein Global Head of Practice Resource
Measurements
P. Schwenk Project Engineer
M. Lange Head of Section Project Engineering
☐ Strictly Confidential Keywords:
LiDAR, Floating Lidar Device, Validation,
OWA/CT FLD Roadmap
☐ Private and Confidential
☐ Commercial in Confidence
☐ DNV GL only
☒ Client’s Discretion
☐ Published
Reference to part of this report which may lead to misinterpretation is not permissible.
Rev. No. Date Reason for Issue Prepared by Verified by Approved by
A
B
C
D
2016-03-09
2016-03-29
2016-03-31
2016-06-03
Preliminary draft version
Preliminary final version
Final version (electronic issue, only)
Minor corrections and amendments
DeSte
DeSte
DeSte
DeSte
PaSch
PaSch
PaSch
PaSch
JGas
MicLan

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 1
Table of contents
1 INTRODUCTION .............................................................................................................. 3
1.1 Clarification Note 4
2 SETUP OF THE FLIDAR 6M PRE-DEPLOYMENT VALIDATION .................................................. 6
2.1 FINO1 Reference Met Mast (F1RMM) 6
2.2 The AXYS FLiDAR 6M Buoy 7
2.3 Settings and Specs of FLIDAR 6M Lidar devices 7
3 FLOATING LIDAR PRE-DEPLOYMENT VALIDATION (FLPV) APPROACH .................................... 8
3.1 Common test conditions and data filtering 8
3.2 Sector filtering 9
3.3 Data coverage requirements for accuracy assessment 9
3.4 Floating Lidar Performance Evaluation 10
4 VALIDATION RESULTS ................................................................................................... 11
4.1 Data Provision 11
4.2 Wind and Sea State Conditions during the Trial 11
4.3 Availability and Reliability 13
4.4 Wind Data Accuracy 15
4.5 Summary of Verification Results 17
5 REMARKS AND LIMITATIONS ......................................................................................... 21
6 CONCLUSIONS ON AXYS FLIDAR 6M BUOY TECHNOLOGY IN CONTEXT OF COMMERCIAL ROADMAP ................................................................................................ 22
7 REFERENCES ................................................................................................................ 23
APPENDIX A – APPLIED KEY PERFORMANCE INDICATORS AND ACCEPTANCE CRITERIA FOR FLD PRE-DEPLOYMENT VALIDATION ...................................................................................... 24
APPENDIX B – WIND DATA TIME SERIES, CORRELATION AND DISTRIBUTION PLOTS ......................... 26
APPENDIX C – FINO1 REFERRNCE MET. MAST: CUP AND WIND VANE INSTURMENT LEVELS ............... 30

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 2
List of abbreviations
Abbreviation Meaning
AC Acceptance Criterion
GH-D GL Garrad Hassan Deutschland GmbH, part of DNV GL group
AXYS AXYS Technologies Inc.
EEZ Exclusive Economic Zone
F1RMM FINO1 Reference Met Mast
FLD Floating LiDAR Device
FLiDAR 6M AXYS FLiDAR 6M Buoy (formerly known as WindSentinel Buoy)
FLiDAR-6M-ZephIR AXYS FLiDAR 6M Buoy employing a ZephIR 300 type Lidar
MSL Mean Sea Level
NOAH Narec Offshore Anemometry Hub
RMM Reference Met Mast
SL Actual Sea Level
LAT Lowest astronomical tide
KPI Key Performance Indicator
OEM Original Equipment Manufacturer
WS Wind Speed
WD Wind Direction

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 3
1 INTRODUCTION
AXYS Technologies Inc. (AXYS or the Client) commissioned GL Garrad Hassan Deutschland GmbH (“GH-D”), part of the DNV GL group (“DNV GL”) to carry out an independent assessment of an AXYS FLiDAR 6M Floating Lidar Device (“FLiDAR 6M”) offshore validation, executed over a 5 month period next to the FINO1 Offshore Research Platform in German North Sea waters. This mandate includes full data processing and analysis as well as reporting on system reliability and
wind data quality related Key performance Indicators (KPI) from the OWA/CT Roadmap [1] against prescribed Acceptance Criteria (AC). The offshore validation of the AXYS Floating Lidar Device employing two ZephIR 300 type Lidars (FLIDAR 6M-ZephIR) was carried out for an overlapping period of approx. 5 months from 2015-06-22 to 2015-11-21 against the 103 m FINO1 Reference Met Mast (F1RMM) which is located in the North Sea some 25 nautical miles to the North to the Island of Borkum, Germany. The FLiDAR 6M Buoy with S/N 6NB00160
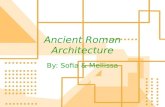
was deployed at a position some 310 m to the NW (approx. 340°) from the F1RMM, see Figure 1.
Figure 1: Positions of FINO1 Reference Met Mast (F1RMM), the neighbouring Alpha Ventus wind farm and the AXYS FLiDAR 6M Buoy (FLiDAR 6M) Floating Lidar to the NW of FINO1 Data analysis in terms of wind speed and wind direction comparisons for both Lidar units on the buoy was performed at the five different wind speed reference levels provided by the F1RMM, i.e. at 41, 61, 81, 91 and 103 m above MSL (for simplicity those heights are referred to the nominal heights of 40, 60, 80, 90 and 103 m in the following report) and against a wind direction reference level at 90 m.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 4
The comparisons were then evaluated for specific wind data quality related Key Performance Indicators (KPIs) against pre-defined Acceptance Criteria (AC) as formulated in the OWA-CT/DNV GL Roadmap for Floating Lidar Devices towards Commercial Acceptance [1]. DNVGL has not been involved in the data collection. Data from the FLIDAR 6M, i.e. from both Lidars and
its ancillary systems like wave sensors on the buoy were provided by AXYS, directly. Data from the F1RMM were provided by DEWI, who are operating the wind and other meteorological measurement systems on FINO1. However, DNV GL has witnessed similar FLiDAR 6M setups, directly, at various occasions, and is fully aware of the F1RMM setup from past FINO1 engagements. Neither the installation nor the operation of the FLIDAR 6M buoy was witnessed by DNV GL. However,
AXYS have provided sufficiently detailed and meaningful a report with regards to the installation of the FLiDAR 6M buoy next to FINO1 [2]. This report is aimed at evaluating and documenting the FLIDAR 6 M five (5) month validation results with regards to comparing both Lidar devices on board of the buoy separately (and for reliability purposes in complementary combination) against the 103 m F1RMM.
Finally, a DNV GL statement towards the successful achievement of the FliDAR-6M-ZephIR product to be called pre-commercial is given in the conclusions, combining the evidence from this FINO1 trial with results from two other 1 month offshore validations of a similar FLiDAR-6M-ZephIR setup (i.e. as well employing a ZephIR Lidar). These two campaigns were successfully carried out in the North Sea off the East Anglian coast (UK) next to the NAREC/NOAH offshore reference met tower.
1.1 Clarification Note It is important to note that the validation approach applied for this campaign focusses on the capabilities of floating LiDAR technology – in this case for the AXYS FLiDAR 6M Buoy S/N 6NB00160 (FLiDAR 6M F160) employing a ZephIR 300 with the S/N Z485 (ZP1) and another ZephIR 300 with the S/N Z473 (ZP2) – measuring primary wind data, namely wind speed and wind direction. Therefore, while the FLIDAR 6M currently features additional measured properties the scope of this document is limited to its
reliability in terms of system and data availability and to the quality of its primary wind data
measurements. There are other secondary however important parameters required for a comprehensive offshore wind resource assessment such as turbulence intensity, temperature, air density, relative humidity etc. In addition to that, complementary oceanographic measurements are also required to achieve a full met-ocean measurement campaign. The capabilities to measure these parameters with a sufficient quality
and coverage – in order to complete a comprehensive offshore wind resource and met-ocean measurement campaign – are not treated in this report. Although system availability is one of the KPIs used in this technical note, this document does not directly address or cover the seaworthiness of the FLIDAR 6M device. For information on seaworthiness the FLS manufacturer may be contacted.
DNVGL assumes that the following items are fulfilled as pre-requisites to this FLD offshore validation campaign:
Both the ZephIR Lidars operated on the FLIDAR 6M have successfully been pre-validated against
an IEC [1] compliant onshore met mast. The according test protocols as produced by the ZephIR Lidar OEM [5] and [6] have been provided by AXYS.
The Layout of the F1RMM is in gross compliance with industry best practice and relevant standards, acknowledging the fact that cup measurements needed to be corrected for met mast structure induced flow distortions. These corrections where carried out by DNV GL based on correction factors developed as part of a German, federally funded project called FINO-Wind, see section 2.1. DNV GL considers the layout of the F1RMM and the applied WS corrections acceptable to serve as a reference for FLD validations.
The FINO1 offshore reference site provides a reasonable range of representative offshore
conditions with regards to wave and meteorological properties for achieving a representative

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 5
wind speed (WS) data coverage and WS bin wise completeness according to the Roadmap [1] within a multi-months FLD validation campaign – which is to be confirmed by this report.
DNV GL emphasizes that all conclusions on the capabilities of the FLIDAR 6M drawn from this FINO1 offshore validation campaign are valid under sea state and meteorological conditions similar to those
experienced during this validation campaign, only.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 6
2 SETUP OF THE FLIDAR 6M PRE-DEPLOYMENT VALIDATION DNV GL hasn’t performed a site visit to the FINO1 platform dedicated to this campaign but has extensive knowledge of the platform its met tower and the measurements’ layout from several years of FINO1 operations and from previous comparison campaigns. DNV GL specifically acknowledges the data and technical information provided by DEWI. Based on this evidence DNV GL considers this test site suitable for offshore validations of Floating Lidar Devices (FLD).
An installation report for the FLiDAR 6M unit at the FINO1 platform issued by AXYS themselves based on
their activities and logs during the deployment [3] has been provided.
2.1 FINO1 Reference Met Mast (F1RMM)
The nominal GPS position of the Reference Met Mast (F1RMM) was at
Latitude: N 54° 00' 53.5"
Longitude: E 006° 35' 15.5"
Wind measurements have been conducted at the F1RMM at various heights between 10 m and 83 m above the base of the mast, i.e. the FINO1 platform deck. It is understood that the mast is located on a
platform approximately 20 m above the lowest astronomical tide (LAT). To reference the measurement heights to mean sea level (MSL) they were adjusted by approximately 0.5 m to be representative [2]. The met mast data set contains ten-minute mean, max and standard deviation of wind speed at nominal heights at 33 m, between 40 m and 90 m at 10 m spacing and at 103 m. From these heights the 103, 90, 80, 60 and 40m levels were selected as reference for wind speed comparisons between FLiDAR 6M and F1RMM.
Mean and standard deviation of wind direction are recorded at nominal heights of 33, 70, 70 and 90 m.
However, for F1RMM data availability reasons only wind vane data from the 90 m level was used as reference for wind direction comparisons at the Lidar levels of 40, 60, 80, 90 and 103 m. Furthermore pressure, temperature and relative humidity are recorded. All heights are referred to in MSL for the remainder of this report. Further details of the F1RMM are shown in Appendix C.
Due to the neighbouring Alpha Ventus wind farm to the East of FINO1 and for the need to avoid heavily disturbed wind speed data from sectors near the core of the met mast downwind wakes all wind speeds from sectors outside a range of 180° to 270° were excluded from data processing. This sector clipping is
described in section 3.2. For wind direction comparisons no sector clipping or avoidance due to mast wake effects was considered necessary.
Figure 2: FINO1 Reference Met Mast (F1RMM) located in German EEZ North Sea waters.
Right Panel shows an upward view of the FINO1 Met. Mast towards the South, with cup carrying booms to the left.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 7
For different reasons non-guyed offshore met masts are generally more solid and hence less porose compared to fully IEC compliant onshore met masts. The bulkiness of the F1RMM induces flow distortion, which is why wind speed measurement corrections were applied to the affected SE sector anemometers. These corrections were carried out by applying sector dependent factors to the wind speeds. The rational and principle of the applied method of correction (the so-called UAM-Method) is explained in [4]. This
method was further elaborated and specifically adapted to the FINO1 met mast in the federally funded project “FINO-Wind”.
2.2 The AXYS FLiDAR 6M Buoy
The nominal GPS position of the AXYS FLiDAR 6M Buoy (FLiDAR 6M) was 310 m to the Northwest at
approx. 340° from F1RMM at
Latitude: 55° 8.8133' N
Longitude: 001° 25.5117’ W
2.3 Settings and Specs of FLIDAR 6M Lidar devices
Specs of the AWSB Floating Lidar:
AWSB S/N 6NB00160
ZP1 S/N Z485
o Height settings: [30 37 47 58 68 78 88 101 118 148 m] relative to actual sea level
o Orientation relative to AWSB’s bow:
270°
ZP2 S/N Z473
o Height settings: [30 37 47 58 68 78 88 101 118 148 m] relative to actual sea level
o Orientation relative to AWSB’s bow: 90°
Table 1: List of height levels available from AWSB and F1RMM (see Appendix C), those relevant for wind data comparisons between AWSB and F1RMM are denoted as bold letters.
Source Height Settings (relative to MSL or actual sea level) / [m]
ZephIR ZP1 32.5 40 50 60 70 80 90 103 120 150
ZephIR ZP2 32.5 40 50 60 70 80 90 103 120 150
Cups @ Mast used as
WS Reference
- 40 - 60 - 80 90 103 - -
Vanes @ Mast used as WD Reference
- 90 - 90 - 90 90 90 - -
These configuration details were taken from [3] or from provided data files, but they could not be verified by DNV GL, directly.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 8
3 FLOATING LIDAR PRE-DEPLOYMENT VALIDATION (FLPV)
APPROACH Recommended guidelines for the setup of the AWSB floating Lidar pre-deployment validation campaign
are based on the OWA/CT Roadmap for FLDs towards commercial acceptance [1]. Key features of the assessments of the performance of the FLD under test are based on the following definitions of Key Performance Indicators (KPIs) and Acceptance Criteria (see also Appendix A):
Key Performance Indicators (KPIs): The parameters derived from analysis of the data gathered, which will specifically be used to assess performance.
Acceptance Criteria (AC): Specific benchmark values defined for a sub-set of the KPIs which constitute the required minimum and best practice level of performance for the floating LiDAR system to be achieved
These parameters are divided into two categories: Availability or Reliability of the system; and Accuracy of its measurements.
Generally, it is recommended that the KPIs are evaluated for heights representative of covering the full rotor disk of the projected type of offshore wind turbine. If this is not possible the upper measurement height shall – as a minimum requirement – be representative of offshore turbine’s hub height, and several other lower heights if feasible down to 30 m above mean sea level (AMSL) should also be measured.
3.1 Common test conditions and data filtering In the process of this FLPV trial the following test conditions and filters are applied
All comparisons are based on 10-minute average wind values returned from wind vanes and
MEASNET calibrated cup anemometers installed on the reference mast (primary reference) and concurrent wind direction and wind speed data from the Lidar under test.
All data collected during periods of precipitation (i.e. when precipitation is detected by the rain sensor of the buoy mounted ZephIR with a ten minute averaged period) are excluded for its (however supposedly low) potential influence on Lidar measurements.
All other reported data (particularly wind speed) from the reference met mast and the two (2)
Lidars employed on the AWSB are used in the comparison analysis.
For the validation of Lidar wind speeds against the mast the wind speeds from the cup anemometers at 40 m, 60 m, 80 m, 90 m and 103 m nominal height are used. The reference wind speed data are deduced according to the sector screening and flow distortion correction of the cup data prior to comparison, see following section.
A low wind speed cut off filter for wind speeds <2 m/s is applied to the reference measurements from the cup anemometers.
For the validation of Lidar wind directions against the mast the wind direction from the vane at 90 m is used as reference for all Lidar heights, i.e. 40 m, 60 m, 80 m, 90 m and 103 m.
No ZephIR Lidar specific internal quality filters are applied to the measured FLD data prior to the analysis conducted.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 9
3.2 Sector filtering
The orientation of booms at the met mast carrying reference cup anemometers is to the SouthEast. See sketch in Figure 3. Hence, to avoid heavily disturbed wind flow when coming from the NW, i.e. opposite from the core of the met mast downwind wakes towards the SE pointing booms, and due to the neighbouring Alpha Ventus wind farm to the West of FINO1 – potentially influencing the wind flow towards the F1RMM and the
AWSB differently – all wind speeds from sectors outside a range of 180° to 270° were excluded from data processing. As wind speeds measured from this sector are still considered as potentially disturbed by the mast structure, they were corrected by applying 5° sector dependent corrections factors as deduced from the UAM-Method, as mentioned in section 2.1. Cup data at all levels were screened against wind direction data from the wind vane level at 90 m. No Lidar specific filters were applied to the measured Lidar data prior to the analysis conducted.
Figure 3: Wind direction sectors used to select predicted undisturbed wind speed data from cup anemometers mounted on SE pointing booms for Lidar to cup comparisons. Area shaded in blue indicates position of neighbouring wind farm. Positions of AWSB and FINO1 are marked by bullets.
3.3 Data coverage requirements for accuracy assessment In compliance to the data coverage requirements outlined in the Roadmap [1], DNV GL has assessed the
data coverage of the floating Lidar system at the four comparison heights. This has been conducted according to the following requirements:
a) Minimum number of 40 data points required in each 1 m/s bin wide reference wind speed bin centred between 2.5 m/s and 11.5 m/s, i.e. covering a range between 2 and 12 m/s.
b) Minimum number of 40 data points required in each 2 m/s bin wide reference wind speed bin centred on 13 m/s and 15 m/s, i.e. covering a range 12 m/s to 16 m/s.
90
SE Booms
for Cups180°- 270°
Used Sector
NW Booms
for Vanes
FINO 1

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 10
c) Minimum number of 40 data points in each 2 m/s bin wide reference wind speed bin centred on 17 m/s and above, i.e. covering a range above 16 m/s only if such number of data is available. This is not mandatory.
3.4 Floating Lidar Performance Evaluation The performance of the FLD under test is evaluated for its system and data availability as well as for its wind data accuracy by a number of Key Performance Indicators (KPI) and according Acceptance Criteria
(AC). These KPIs and ACs relevant for FLD validation were developed in collaboration between OWA/CT and DNV GL already in 2011 [1]. The evaluation approach in terms of the applicable KPIs and according threshold for the ACs is outlined in Appendix A, where KPIs and ACs for system and data availability are listed in the first table and those for wind data quality in the second table.
The performance assessment of the given KPIs and respective ACs regarding Availability and Accuracy is executed at selected reference levels, in this case at each of in total five (5) met tower’s reference cup anemometry levels at heights of 40 m, 60, 80 m, 90 m and 103 m above MSL.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 11
4 VALIDATION RESULTS All FLD data for the pre-deployment validation campaign (i.e. those from both Lidar units on the FLIDAR 6M) were provided by AXYS to DNV GL, directly, and covered a period lasting from 2015-06-22, 00:00 until 2015-11-21, 23:50 UTC yielding a total duration of 153 days. All data available from this period were taken into account in the overall data processing scheme prior to filtering, regardless of the environmental conditions.
Data from the F1RMM overlapping this period were provided by DEWI who operate the wind measurement system at the mast on FINO1. The assessment of the KPIs and their respective Acceptance Criteria with regards to wind data accuracy was performed at five (5) matching height levels between 40 m and 103 m from F1RMM and FLIDAR 6M (at each of the two ZephIR Lidars).
4.1 Data Provision
The following remarks and reservations with respect to data transfer, traceability and processing are
noted:
ASWB data were provided to DNV GL for the whole campaign period by AXYS, directly.
It is noted, that the ZephIR Lidar wind statistics were returned by the central controller unit (called WatchMan 500) installed on the FLIDAR 6M. This unit collected the 1-sec raw data from the ZephIR 300 to calculate the 10 minute wind data statistics.
DNV GL has carried out spot checks for integrity of the data from both Lidars as provided by AXYS by comparisons to data from the ZephIRs in an original OEM’s data format. The spot
checks successfully verified the integrity of the data provided.
4.2 Wind and Sea State Conditions during the Trial
During the validation period of the FLIDAR 6M the device encountered a wide range of wind conditions facing 10 minute average wind speeds of up to 24.4 m/s at the lowest comparison level (40 m) and 26.4 m/s at the upper most level (103 m) – see Table 2. The significant wave heights observed during the trial period at the FINO1 site were in a range up to 5.9 m; compare Table 3 and Figure 4. The experienced maximum wave heights cover a range up to
above 10.7 m. As of public naval information for the FINO1 location the tidal difference between lowest astronomical tide (LAT) and highest astronomical tide (HAT) is 5.8 m.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 12
Table 2: Maximum 10 min averaged wind speeds measure at the F1RMM and by both Lidar types on FLIDAR 6M across the total campaign period.
Table 3: Maximum values of Significant Wave Height Hs and maximum Wave Height Hmax
(along with Wave Period) observed by FLIDAR 6M during trial period
Figure 4: Probability distribution of Significant Wave Height Hs and max. Wave Height Hmax.
WS Max Cup ZP1 ZP2
Level / [m]
103 26,42 25,01 26,57
90 26,07 25,57 25,72
80 25,71 25,56 25,14
60 25,13 25,01 24,59
40 24,40 23,31 24,29
WS [m/s]
Campaign Max Campaign Max
[m] [s]
SIGN Wave Height 5,9 at SIGN Wave Period 10,8
Heighest Wave Height 10,7 at Peak Wave Height 18,2

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 13
4.3 Availability and Reliability DNV GL reviewed the KPIs and Acceptance Criteria relating to the system and data availability of the FLIDAR 6 M systems for each of the two ZephIR Lidars on the buoy separately and for both in combination. An overview of the findings for each KPI is displayed in Table 4. System availability:
The table below summarizes in the upper two panels the results of the availability assessments for Overall System Availability (OSACA) across the complete 5 months validation campaign and the Monthly System Availabilities (MSA1M, Month 1 to Month 5) for each ZephIR Lidar individually. It clearly shows that the acceptance criteria for MSA1M (to exceed 90 %) and OSACA (to exceed 95 %) as given in [2] are met for all instances. As this type of FLD employs two Lidar units the system availability was as well looked at from a
redundant point of view, i.e. treating the SAs of both Lidars in a complementary “OR”-combination. This
means that the FLIDAR 6 M systems is regarded as available if at least one Lidar is operating according to specifications, producing output data. As displayed in the lowest panel of Table 4 in the last column this “OR”-combined SA exceeds 99% in the overall campaign period and 98.55% by month, individually. Table 4: Overall System Availability and Monthly System Availabilities across 5 months of
campaign length for each ZephIR Lidar (ZP1 upper panel, ZP2 lower panel), and OR-combined system availability for both Lidars together.
ZephIR 1
Period KPI Start End #-val ref. #-val 95%/90%
Campaign OSACA 22.6.15 0:00 21.11.15 23:50 22032 21335 96,8%
Month1 MSA1M 22.6.15 0:00 21.7.15 23:50 4320 4238 98,1%
Month2 22.7.15 0:00 21.8.15 23:50 4464 4380 98,1%
Month3 22.8.15 0:00 21.9.15 23:50 4464 4412 98,8%
Month4 22.9.15 0:00 21.10.15 23:50 4320 4247 98,3%
Month5 22.10.15 0:00 21.11.15 23:50 4464 4058 90,9%
ZephIR 2
Period KPI Start End #-val ref. #-val 95%/90%
Campaign OSACA 22.6.15 0:00 21.11.15 23:50 22032 21720 98,6%
Month1 MSA1M 22.6.15 0:00 21.7.15 23:50 4320 4228 97,9%
Month2 22.7.15 0:00 21.8.15 23:50 4464 4423 99,1%
Month3 22.8.15 0:00 21.9.15 23:50 4464 4411 98,8%
Month4 22.9.15 0:00 21.10.15 23:50 4320 4252 98,4%
Month5 22.10.15 0:00 21.11.15 23:50 4464 4406 98,7%
ZP1+ZP2, OR combined
Period KPI Start End #-val ref. #-val 95%/90%
Campaign 22.9.15 0:00 21.10.15 23:50 22032 21836 99,1%
Month1 22.10.15 0:00 21.11.15 23:50 22032 21836 99,1%
Month2 0.1.00 0:00 0.1.00 0:00 4320 4255 98,5%
Month3 0.1.00 0:00 0.1.00 0:00 4464 4434 99,3%
Month4 22.6.15 0:00 21.11.15 23:50 4464 4420 99,0%
Month5 22.6.15 0:00 21.7.15 23:50 4320 4267 98,8%
"OR"-Combined System availability
System availability C: 95% | M: 90%
System availability C: 95% | M: 90%

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 14
Data availability: No post-processing quality filters were applied to the Lidar data for this trial, so the data availabilities after system internal filtering and after post-processed quality filtering are the same. Any external filters like those based on met mast instrumentation, sector filtering or precipitation are irrelevant when
assessing the reliability of the Lidar, so the filtered data availability was not considered here. Table 5 below shows the Overall Post-processed Data Availability (OPDACA) across the complete FLIDAR 6M verification campaign and the Monthly Post-processed Data Availability (MPDA1M) in accordance to the Roadmap [1]. The Roadmap states that the assessment of the KPIs and their Acceptance Criteria should be performed at each selected reference level, in this case at each of the FINO1 met mast’s
reference anemometry levels, used in this comparison and highlighted in shading. As a result, it is shown that the acceptance criterion for Data Availability to be > 85 % across the complete campaign duration is exceeded for each of the two Lidars and at each of the five reference levels. Furthermore, when treating the Data Availability of both Lidars in a complementary “OR”-combination the value at each level and for each period (overall and monthly) exceeds 98 %.
Table 5: Monthly and Overall Post-processed data availability. Shading indicates wind value relevant comparison levels.
ZephIR 1
Height [m] 33 40 50 60 70 80 90 103 120 150
Campaign 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8%
Month1 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0%
Month2 98,1% 98,1% 98,1% 98,1% 98,1% 98,1% 98,1% 98,1% 98,1% 98,1%
Month3 98,8% 98,8% 98,8% 98,8% 98,8% 98,8% 98,8% 98,8% 98,8% 98,8%
Month4 98,3% 98,3% 98,3% 98,3% 98,3% 98,3% 98,3% 98,3% 98,3% 98,3%
Month5 90,7% 90,7% 90,7% 90,7% 90,7% 90,7% 90,7% 90,7% 90,7% 90,7%
ZephIR 2
Height [m] 33 40 50 60 70 80 90 103 120 150
Campaign 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8% 96,8%
Month1 97,8% 97,8% 97,8% 97,8% 97,8% 97,8% 97,8% 97,8% 97,8% 97,8%
Month2 99,1% 99,1% 99,1% 99,1% 99,1% 99,1% 99,1% 99,1% 99,1% 99,1%
Month3 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7%
Month4 91,3% 91,3% 91,3% 91,3% 91,3% 91,3% 91,3% 91,3% 91,3% 91,3%
Month5 96,7% 96,7% 96,7% 96,7% 96,7% 96,7% 96,7% 96,8% 96,8% 96,8%
ZP1|ZP2
Height [m] 33 40 50 60 70 80 90 103 120 150
Campaign 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7%
Month1 98,4% 98,4% 98,4% 98,4% 98,4% 98,4% 98,4% 98,4% 98,4% 98,4%
Month2 99,3% 99,3% 99,3% 99,3% 99,3% 99,3% 99,3% 99,3% 99,3% 99,3%
Month3 99,0% 99,0% 99,0% 99,0% 99,0% 99,0% 99,0% 99,0% 99,0% 99,0%
Month4 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7% 98,7%
Month5 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0% 98,0%
"OR"-Combined Data availability
Campaign Overall and Monthly Data availability per height level C: 85% | M: 80%
Campaign Overall and Monthly Data availability per height level C: 85% | M: 80%

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 15
4.4 Wind Data Accuracy DNV GL has carried out the wind data comparison against the relevant KPIs and Acceptance Criteria given in [1] and in Appendix A which are related to the WS and WD accuracy of the FLIDAR 6 M units. The comparisons in this section are based on concurrent ten-minute averaged wind values from the FLIDAR 6M’s Lidar units and the F1RMM. For wind speed (WS) and wind direction (WD) comparisons a low wind speed cut-off of 2 m/s has been applied, based on each level’s cup data.
Due to the sector dependent wind speed averaging no further wind direction sector screening needed to be applied, compare section 3.2.
4.4.1 Data coverage requirements for accuracy assessment
DNV GL has assessed the wind speed data coverage at the five (5) comparison heights for both Lidars
separately, see Table 6 below. For the period considered in this report, the Roadmap related WS bin wise data completeness was achieved for all WS bins up to 22 m/s at all treated comparison reference heights, see tables
Table 6: Data coverage per wind speed bin for ZP1 (upper panel) and for ZP2 (lower panel) after all filtering required for data comparisons, see section 3.1. Complete bins including at least 40 values are highlighted in green shading.
WS Bins / [m/s] ZephIR 1
Bin Center 2,5 3,5 4,5 5,5 6,5 7,5 8,5 9,5 10,5 11,5 13 15 17 19 21 23 25
Level / [m] RMM number of 10 min data entries per WS bin - AFTER filtering for data to be used for regression analysis Sum
103 283 437 533 414 543 706 622 487 425 473 808 680 392 248 188 51 16 7306
90 290 444 528 429 548 702 608 499 442 485 789 691 398 243 157 47 8 7308
80 303 464 530 432 569 718 607 475 458 464 826 670 376 235 137 38 5 7307
60 306 494 497 433 587 624 563 416 473 482 828 542 333 236 81 29 3 6927
40 272 488 496 465 582 600 551 411 492 492 811 499 321 198 62 11 1 6752
WS Bins / [m/s] ZephIR 2
Bin Center 2,5 3,5 4,5 5,5 6,5 7,5 8,5 9,5 10,5 11,5 13 15 17 19 21 23 25
Level / [m] RMM number of 10 min data entries per WS bin - AFTER filtering for data to be used for regression analysis Sum
103 278 434 535 416 548 710 623 489 426 476 815 697 412 260 205 68 27 7419
90 284 441 530 431 552 706 610 501 444 487 795 711 416 260 171 65 14 7418
80 296 463 531 434 573 723 608 477 461 465 833 689 395 252 152 56 9 7417
60 298 492 499 438 590 627 565 418 475 483 835 562 351 255 99 45 4 7036
40 269 484 496 470 585 603 553 413 494 493 818 526 335 219 79 24 1 6862

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 16
4.4.2 Wind speed accuracy
A summary of the findings for each wind-speed-related KPI is presented in Table 7. The wind speed accuracy assessment has been conducted at five (5) heights between 40 and 103 m above MSL. The slopes (Xmws) and Coefficient of Determination (R2
mws) are presented for all compared heights. It can be seen that for both ZephIRs these fall within the best practice acceptance criteria [0.98 > Xmws > 1.02] and [R2
mws > 0.98] as given in [1] for the data period considered here.
Plots for WS regression results together with WS time series plots selected for a few heights can be found in Appendix B. Table 7: Summary of linear regression analysis results for wind speed comparisons between the two ZephIRs employed on the FLIDAR 6M and the reference cups at all reference comparison levels. Colour shading indicates the compliance (green) or failing (red) with
regards to the prescribed KPIs’ best practice or minimum Acceptance Criteria (see legend).
4.4.3 Wind direction accuracy:
The wind direction data comparison was conducted at five (5) probing heights between 40 and 103 m for
each of the two ZephIR Lidars against the mast mounted wind vane at 90 m above MSL. Note, that 180°
ambiguities were observed in wind directions data yielded by the ZephIR Lidar at all heights when correlated to the wind vane readings at 90 m (see Appendix B). These ambiguities were solved in a post processing using the ZephIRs’ own external wind directions provided by an external met station, which was mounted to at short mast on the buoy some 4 m above the water line. Potential disturbances of the met mast (vane) or buoy wind direction measures induced from met mast structure or from the neighbouring windfarm are regarded as negligible, i.e. to be within typically
expected WD accuracy. Hence, data from all directions are taken into account for FLIDAR 6M to F1RMM WD accuracy assessment.
WS comparison slope R2 coeff. WS CUP avg WS LID avg WS diff.relative
WS diff.
Level / [m] # Xmws R2mws m/s m/s m/s
ZephIR 1 103 7307 1,014 0,992 10,00 10,16 0,16 1,6%
90 7309 1,010 0,993 9,92 10,03 0,11 1,1%
80 7307 1,014 0,993 9,78 9,93 0,15 1,5%
60 6927 1,019 0,993 9,56 9,77 0,21 2,2%
40 6752 1,006 0,992 9,41 9,47 0,06 0,7%
ZephIR 2 103 7420 1,015 0,992 10,13 10,30 0,17 1,7%
90 7419 1,012 0,993 10,04 10,16 0,12 1,2%
80 7417 1,015 0,993 9,90 10,06 0,16 1,6%
60 7036 1,019 0,993 9,69 9,89 0,20 2,1%
40 6862 1,005 0,992 9,54 9,59 0,06 0,6%
KPIs
Legend
KPI -AC failed
KPI -AC passed minimum
KPI -AC passed best practice

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 17
The results for the wind direction comparison are presented in Table 8 where the Wind Direction Regression Slope (Mmwd), the Mean Offset (OFFmwd) and the Coefficient of Determination (R2
mwd) are presented. The KPI values for WD Slope and R2 fall within the best practice acceptance criteria for both Lidars and at all selected heights. KPI values for Offset are mostly within best practice for Lidar 1, while those for Lidar 2 meet the minimum criterion, only. Plots for WD regression results selected for a few
heights can be found in Appendix B. Table 8: Overview of linear regression results for WD comparisons between the two ZephIR Lidars employed on the FLIDAR 6M and the 90 m wind vane reference wind direction. Colour shading indicates compliance with prescribed best practice or minimum KPI’s Acceptance Criteria (see legend).
4.5 Summary of Verification Results
4.5.1 Campaign Duration
In the Roadmap document [2] a six (6) month minimum total campaign duration was prescribed in order to allow the tested unit to experience different season-related sea states and other environmental conditions. From provided information and data sets DNV GL understands that
(a) the FLIDAR 6M buoy was deployed on 21st June 2015 and the verification campaign was
officially started on June 22nd 2015 (b) that the mooring was released from its anchor on November 29th 2015 (c) data from this deployment shall be treated until end of the day 21st Nov 2015, in order to
complete a five months total campaign length
The campaign duration of 153 days is considered reasonably long. And due to the achieved data
completeness and WS coverage up to 22 m/s this campaign is considered significant and compliant to the Roadmap in terms proving the wind data accuracy of the FLIDAR 6M.
4.5.2 System and Data Availability
System and data availabilities yielded from this FLIDAR 6 M validation campaigns across the mentioned campaign duration as well as for each month individually were well above the prescribed ACs of the Roadmap document [1].
WD comparison slope R2 coeff. mean diff.
KPIs
Level / [m] # Mmwd R2mwd OFFmwd
ZephIR 1 103 19366 1,001 0,996 5,76
90 19374 1,002 0,996 5,21
80 19365 1,002 0,996 4,84
60 18164 1,000 0,997 4,61
40 16144 1,000 0,997 4,04
ZephIR 2 103 19348 1,001 0,995 9,48
90 19351 1,002 0,996 8,95
80 19343 1,003 0,996 8,51
60 18136 1,002 0,996 8,19
40 16117 1,001 0,996 7,85
Legend
KPI -AC failed
KPI -AC passed minimum
KPI -AC passed best practice

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 18
Detailed results are given in Table 9 below. Table 9: Summary of achievement after the 153 days (5 months) FINO1 validation campaign for prescribed KPIs and Acceptance Criteria with regards to system and data availability
KPI Definition / Rationale Acceptance Criteria across total of
five (5) months campaign duration;
OSACA Overall System Availability –
Campaign Average
≥95%
Results:
ZP1: [96.8 % ] Passed
ZP2: [98.6 % ] Passed
OR combined: [99.1 % ] Passed
MSA1M Monthly System Availability –
Monthly average for each
of the 5 single months
≥90%
Results:
ZP1: [90.9 % to 98.8 % ] Passed
ZP2: [97.9 % to 99.1 % ] Passed
OR combined: [98.5 to 99.5 % ] Passed
OPDACA Overall Post-quality-filtered
Data Availability
Campaign Average
evaluated at each of the five (5)
comparison levels
No Lidar system internal quality filters
were applied in the data analysis
≥85
Results:
ZP1: [96.8 % ] Passed @ all levels
ZP2: [96.8 % ] Passed @ all levels
OR combined: [98.7 % ] Passed
@ all levels
MPDA1M Monthly Post-quality-filtered
Data Availability –
Monthly average for each
of the 5 single months
evaluated at each of the five (5)
comparison levels
No Lidar system internal quality filters
were applied in the data analysis
≥80%
Results:
ZP1: [90.8 % to 98.8 % ] Passed
@ all levels
ZP2: [91.3 % to 99.1 % ] Passed
@ all levels
OR combined: [98.0 to 99.3 % ] Passed
@ all levels

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 19
4.5.3 Wind Measurement Accuracy
The wind speeds measured by both ZephIR Lidars employed on the FLIDAR 6M and those from the reference mast F1RMM correlated very well at all five (5) comparison heights, showing a low level of scatter and good agreement in terms of linear regression analyses. For both Lidars separately this pre-deployment validation campaign indicates that the FLIDAR 6M is capable in reproducing mast mounted cup wind speeds at a high level of accuracy. The Best Practice criteria for the KPIs “Mean Wind Speed – Slope” and “Mean Wind Speed – Coefficient of Determination”
were passed by both Lidars at all selected comparison levels. All wind direction Best Practice criteria (or in a few instances at least the Minimum criteria) were passed at all comparison heights for the KPIs “Mean Wind Direction – Slope”, “Mean Wind Direction – Coefficient of Determination” and “Mean Wind Direction – Offset”, indicating the FLIDAR 6M’s capability of reproducing mast based vane wind directions at a high level of accuracy.
The detailed results with respect to KPIs and ACs for wind speed and wind direction comparisons are
given in Table 10, below. Table 10: Summary of achievement after the 153 days (5 months) FINO1 validation campaign
regarding KPIs and related Acceptance Criteria for data accuracy assessment
KPI Definition / Rationale
Acceptance Criteria across total campaign
duration
Best Practice Minimum
Xmws Mean Wind Speed – Slope
Assessed for wind speed range [all above 2 m/s]
0.98 – 1.02
Results:
ZP1: [1.006 to 1.019]
Passed at all levels
ZP2: [1.005 to 1.019]
Passed at all levels
0.97 – 1.03
R2mws Mean Wind Speed – Coefficient of
Determination
Assessed for wind speed range [all above 2 m/s]
>0.98
Results:
ZP1: [0.992 to 0.993]
Passed at all levels
ZP1: [0.992 to 0.993]
Passed at all levels
>0.97

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 20
KPI Definition / Rationale
Acceptance Criteria across total campaign
duration
Best Practice Minimum
Mmwd Mean Wind Direction – Slope
Assessed for wind speed range [all above 2 m/s]
regardless of the wind direction, i.e. no WD sector clipping applied
180° ZephIR WD ambiguity corrected
by separate buoy met. station
0.97 – 1.03
Results:
ZP1: [1.000 to 1.002]
Passed at all levels
ZP2: [1.000 to 1.003]
Passed at all levels
0.95 – 1.05
OFFmwd Mean Wind Direction – Offset,
in terms of the mean absolute
WD difference over the total
campaign duration
(same as for Mmwd)
< 5°
Results:
ZP1: [4.04° to 4.84]
Passed at 40 to 80m
< 10°
Results:
ZP1: [5.21° & 5.76°]
Passed at 90 & 103m
ZP2: [7.85° & 9.48°]
Passed at all levels
R2mwd Mean Wind Direction – Coefficient
of Determination
(same as for Mmwd)
> 0.97
Results:
ZP: [0.996 to 0.997]
Passed at all levels
ZP2: [0.995 to 0.996]
Passed at all levels
> 0.95

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 21
5 REMARKS AND LIMITATIONS
The presented results have to be regarded under the following reservations and limitations:
Both the data sets provided to DNV GL from
a) the Reference Met Mast, by DEWI (F1RMM) and
b) the FLIDAR 6M including data from the two Lidar employed together with data from wave, meteorological and ancillary sensors
were visible to AXYS.
However, DNV GL was able to verify originality of the Lidar data as part of it was provided in the Original Equipment Manufacturers (OEM’s) raw data format.
All information and details on FLIDAR 6M configuration and setup were either taken from [3] or
from provided data files. However, they were not be verified by DNV GL during installation, directly.
The wind direction offset of some 7.8 to 9.5° that has been identified on ZephIR 2 is supposed to be due to an external compass being installed in a location that is susceptible to interference
from surrounding metal components of the buoy. AXYS reports that this has been corrected in more recent systems by installing the external compass in a more ideal location.
All conclusions on the capabilities of the tested FLIDAR 6M unit with the S/N 6NB00160 drawn from this FINO1 verification campaign are valid under sea states and meteorological conditions similar to those experienced during this trial, only.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 22
6 CONCLUSIONS ON AXYS FLIDAR 6M BUOY TECHNOLOGY IN CONTEXT OF COMMERCIAL ROADMAP An independent assessment of the AXYS FLiDAR 6M Buoy (FliDAR 6M, formerly known as WindSentinel) Floating Lidar system was completed by DNV GL in assessing its reliability and comparing its wind measurements from two ZephIR Lidar units against data from the FINO1 Reference Met Mast (F1RMM) on the FINO1 Research Platform in German EEZ North Sea waters.
Sufficient data in terms of WS data completeness and coverage were collected to allow an assessment of this offshore validation in line with the Roadmap [1]. DNV GL concludes that the FLIDAR 6M unit with the S/N 6NB00160 has demonstrated its capability to produce accurate wind speed and direction data by both ZephIR Lidars mounted on the buoy
independently across the range of sea states and meteorological conditions experienced in this trial.
Significant wave heights of up to 5.9 m (and up to 10.7 m for maximum wave height) were recorded by the FLIDAR 6M itself during the campaign. The Lidar wind speeds recorded at the FINO1 site covered a range of up to 24.4 m/s at 40 m and up to 26.4 m/s at 103 m. The Roadmap prescribed WS bin wise data completeness was achieved for all WS bins up to 22 m/s at all
treated comparison heights. The assessments of the Roadmap KPIs for the complete data set (from June 22nd until November 21st 2015) show, that
for both ZephIRs individually the Acceptance Criteria for Overall and Monthly System Availability and Data Availability are met
for both ZephIRs individually best practice Acceptance Criteria for wind speed data accuracy are
met at all selected heights
for ZephIR 1 best practice Acceptance Criteria for wind direction data accuracy are met at all selected heights
for ZephIR 2 in almost all cases the best practice criteria are met for wind direction data accuracy – while in a few instances with regards to wind direction offset the minimum criterion is met, only.
As this type of FLD employs two Lidar units of the same make the system availability was as well treated from a redundant point of view, i.e. treating the SAs of both Lidars in a complementary “OR”-combination. This assessment yielded an “OR”-combined System Availability of just above 99%. Furthermore, DNV GL has recently been involved into two other validation campaigns, namely Narec-F140 (1 month) [7] and Narec-F150 (1 month) [8] in which FLIDAR 6M single-ZephIR systems were
tested. The validation results from both campaigns fulfilled the OWA/CT Roadmap KPI requirements for system and data availability as well as for wind data accuracy. Finally, based on the FINO1 validation campaign results as reported here, together with the two above mentioned test campaigns at Narec, DNV GL draws the conclusion that the AXYS FLiDAR 6M Buoy (FLiDAR 6M) employing at least a single ZephIR 300 type Lidar (as the primary Lidar) has formally qualified for Stage 2 “pre-commercial” in the context of the OWA/CT Roadmap towards
commercialization of Floating Lidar Devices [1].

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 23
7 REFERENCES
[1] “Offshore Wind Accelerator Roadmap for the commercial acceptance of floating Lidar technology”. The Carbon Trust, 21 November 2013.
[2] A detailed drawing of the FINO-1 reference met mast(F1RMM ) taken from
http://www.fino1.de/forschungsdaten/messungen#meteorologische-messungen
[3] “Installation Report AXYS WindSentinel Commissioning and Deployment: FINO 1”, by Axys Technologies Inc., Document No.: xxx, dated 2015-10-06.
[4] A. Westerhellweg, T. Neumann. FINO1 Mast correction, DEWI GmbH, DEWI
Magazin No. 40, February 2012, 2012
[5] M. Mangat and G Ellis, ZephIR Ltd. “PERFORMANCE VERIFICATION of ZephIR ZP 473, Functional tests & full performance verification”, issued by ZephIR Lidar, dated 29/02/2016
[6] M. Mangat and G Ellis, ZephIR Ltd. “PERFORMANCE VERIFICATION of ZephIR
ZP 485, Functional tests & full performance verification”, issued by ZephIR Lidar, dated 29/02/2016
[7] DNV GL Report GLGH-4257 15 13317 266-R-0001 Issue D, “AXYS WindSentinel 6NB00140 (LEM1) Floating Lidar Pre-Deployment Validation at the Narec NOAH
Offshore Met Tower, UK”, dated 2015-12-09.
[8] DNV GL Report GLGH-4257 15 13317 266-R-0002 Issue B, “AXYS WindSentinel 6NB00150 (LEM2) Floating Lidar Pre-Deployment Validation at the Narec NOAH Offshore Met Tower, UK”, dated 2015-09-23

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 24
APPENDIX A – APPLIED KEY PERFORMANCE INDICATORS AND
ACCEPTANCE CRITERIA FOR FLD PRE-DEPLOYMENT VALIDATION Availability / Reliability
The KPIs and Acceptance Criteria relating to availability, all of which are applicable to all measurement heights under consideration, are defined as follows:
KPI Definition / Rationale
Acceptance Criteria
across total campaign duration
OSACA Overall System Availability – Campaign Average
The LiDAR system is ready to function according to
specifications and to deliver data, taking into account all
time stamped data entries in the output data files including flagged data (e.g. by NaNs or 9999s) for the pre-defined total campaign length.
The Overall System Availability is the number of those time stamped data entries relative to the maximum possible number of (here 10 minute) data entries including periods of maintenance (regarded as 100%)
within the pre-defined total campaign period.
≥95%
OPDACA Overall Post-processed Data Availability
The Overall Post-processed Data availability is the number of those data entries remaining
after system internal (unseen) filtering, i.e. excluding (NaN or 999) flagged data entries
and after application of quality filters based on system own parameters, to be defined and applied in a post processing step on the basis of LiDAR Manufacturer guidelines
relative to the maximum possible number of (here 10 minute) data entries (regarded as 100%) within the pre-
defined total campaign period regardless of the environmental conditions within this period.
≥85%
Wind Data Accuracy assessment
The KPIs and Acceptance Criteria relating to accuracy are defined in the following table. To assess the accuracy a statistical linear regression approach has been selected which is based on:
a) a two variant regression y = mx+b (with m slope and b offset) to be applied to wind direction
data comparisons between floating instrument and the reference ; and,
b) a single variant regression, with the regression analysis constrained to pass through origin (y = mx+b; b = 0) to be applied to wind speed, turbulence intensity and wind shear data comparisons between floating instrument and the reference.
In addition, Acceptance Criteria in the form of “best practise” and “minimum” allowable tolerances have been imposed on slope and offset values as well as on coefficient of determination returned from each reference height for KPIs related to the primary parameters of interest; wind speed and wind direction.

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 25
KPI Definition / Rationale
Acceptance Criteria
Best Practice Minimum
Xmws Mean Wind Speed – Slope
Slope returned from single variant regression with the regression analysis constrained to pass through the origin.
A tolerance is imposed on the Slope value.
Analysis shall be applied to wind speed range
a) all above 2 m/s
given achieved data coverage requirements.
0.98 – 1.02 0.97 – 1.03
R2mws Mean Wind Speed – Coefficient of
Determination
Coefficient returned from single variant
regression
A tolerance is imposed on the Coefficient value.
Analysis shall be applied to wind speed range
a) all above 2 m/s
given achieved data coverage
requirements.
>0.98 >0.97
Mmwd Mean Wind Direction – Slope
Slope returned from a two-variant regression.
A tolerance is imposed on the Slope
value.
Analysis shall be applied to
a) all wind directions
b) all wind speeds above 2 m/s
regardless of coverage requirements.
0.97 – 1.03 0.95 – 1.05
OFFmwd Mean Wind Direction – Offset, in terms of the mean WD difference
over the total campaign duration
(same as for Mmwd)
< 5° < 10°
R2mwd Mean Wind Direction – Coefficient
of Determination
(same as for Mmwd)
> 0.97 > 0.95

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 26
APPENDIX B – WIND DATA TIME SERIES, CORRELATION AND
DISTRIBUTION PLOTS Wind speed and wind directions time series for 40 m (upper panels) m and 103 m (lower panels)
comparison heights:

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 27
Wind speed correlation plots for the ZephIR (upper panels) and the Vindicator (lower panels) Lidar at
two selected comparison heights, i.e. at 40, 103 m.
Shown are results of linear WS regressions “forced” through the origin as mentioned above, including information of “un-forced” linear WS regressions, i.e. yielding as well the WS offset in terms of intercept of the regression line of the y-axis.
ZephIR1 Lidar
ZephIR 2 Lidar

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 28
Wind direction correlation plots for the ZephIR (upper panels) and the Vindicator (lower panels) Lidar at two selected comparison heights, i.e. at 40, 103 m. Shown are results for linear “un-forced” WD regressions“, yielding both the WD offset in terms of intercept of the regression line of the y-axis and in terms of the mean WD difference.
ZephIR 1 Lidar
ZephIR 2 Lidar

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 29
Wind direction related polar plot for 90 m wind direction frequency (left panel) and according sector averaged wind speed distribution (right panel) for the 90 m level, valid for the presented campaign period:

DNV GL – Report No. GLGH-4257 15 13316-R-0001, Rev. D – www.dnvgl.com Page 30
APPENDIX C – FINO1 REFERRNCE MET. MAST: CUP AND WIND
VANE INSTURMENT LEVELS
The following graphics show in the upper panel locations of cup anemometers at South-eastward booms
between 33 and 90 m, and in the lower panel wind vane levels at 33, 50, 70 and 90 m.

ABOUT DNV GL Driven by our purpose of safeguarding life, property and the environment, DNV GL enables organizations
to advance the safety and sustainability of their business. We provide classification and technical
assurance along with software and independent expert advisory services to the maritime, oil and gas, and energy industries. We also provide certification services to customers across a wide range of industries. Operating in more than 100 countries, our 16,000 professionals are dedicated to helping our customers make the world safer, smarter and greener.