Development of FM-CW Radar System for Detecting Closed ...radar-light.com/m/ronbun/IEEEpaper.pdf ·...
14
c ⃝ 20XX by the authors; licensee RonPub, L ¨ ubeck, Germany. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/). Open Access Open Journal of Internet of Things (OJIOT) Volume X, Issue X, 20XX http://www.ronpub.com/journals/ojiot ISSN 2364-7108 Development of FM-CW Radar System for Detecting Closed Multiple Targets and Its Application in Actual Scenes Kazuhiro Yamaguchi A , Mitumasa Saito B , Takuya Akiyama A , Tomohiro Kobayashi A , Naoki Ginoza A , Hideaki Matsue A A Tokyo University of Science, Suwa, 5000-1 Toyohira, Chino, Nagano, Japan, 391-0292 [email protected], [email protected] B CQ-S net Inc., Torigoe 7-8, Kanagawa-ku, Yokohama-shi, Kanagawa, Japan, 221-0064, [email protected] ABSTRACT In this paper, detection method for 24 GHz band FM-CW radar system under closed multiple targets with small displacements environment was proposed, and its performances were analyzed by using computer simulation. The proposed detection method used a differential detection method for removing any signals from background objects, and also used a tunable FIR filtering in signal processing for detecting multiple targets. The proposed detection method enabled to detect both the distance and small displacement at the same time for each target correctly from the received signal including all of signals from the targets at the FM-CW radar. The basic performances for FM-CW radar were analyzed in computer simulation, and field experiments for detecting target under actual environments. The results showed that the proposed differential detection could only measure the desired targets, and the human breathing could also be detected in a hospital scene. Furthermore, under closed multiple targets environments, we showed the problems for detecting both distance and small displacements of multiple targets at the same time by using a single radar. Computer simulations were carried out for evaluating the proposed detection method with the tunable FIR filtering for FM-CW radar and analyzing the performance according to the parameters under closed multiple targets environment. The results in computer simulation showed that the proposed detection method could detect both the distance and small displacement correctly under closed multiple targets environment. TYPE OF PAPER AND KEYWORDS Regular research paper: FM-CW radar, distance measuring, small displacement measuring, multiple targets detec- tion, tunable FIR filtering 1 I NTRODUCTION Recently, rapidly evolving wireless communication tech- nologies provides us to communicate various informa- tion from a lot of manufactures in widely technologies field. IoT (Internet of Things) is popularly known as a key topic for developing system and services, and it en- ables various physical devices to collect various things such as sensor information. As one of sensing applica- tions, radar has been employed to detect in widely areas such as on the ground, on the sea, in the air, in space. The radar systems can detect various information according to application areas by transmitted and received through radio wave. Radar systems with 24 GHz band is based on ARIB 1
Transcript of Development of FM-CW Radar System for Detecting Closed ...radar-light.com/m/ronbun/IEEEpaper.pdf ·...

c⃝ 20XX by the authors; licensee RonPub, Lubeck, Germany. This article is an open access article distributed under the terms and conditions ofthe Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Open Access
Open Journal of Internet of Things (OJIOT)Volume X, Issue X, 20XX
http://www.ronpub.com/journals/ojiotISSN 2364-7108
Development of FM-CW Radar System forDetecting Closed Multiple Targets
and Its Application in Actual ScenesKazuhiro Yamaguchi A, Mitumasa Saito B, Takuya Akiyama A, Tomohiro Kobayashi A,
Naoki Ginoza A, Hideaki Matsue A
A Tokyo University of Science, Suwa, 5000-1 Toyohira, Chino, Nagano, Japan, [email protected], [email protected]
B CQ-S net Inc., Torigoe 7-8, Kanagawa-ku, Yokohama-shi, Kanagawa, Japan, 221-0064, [email protected]
ABSTRACT
In this paper, detection method for 24 GHz band FM-CW radar system under closed multiple targets with smalldisplacements environment was proposed, and its performances were analyzed by using computer simulation. Theproposed detection method used a differential detection method for removing any signals from background objects,and also used a tunable FIR filtering in signal processing for detecting multiple targets. The proposed detectionmethod enabled to detect both the distance and small displacement at the same time for each target correctly from thereceived signal including all of signals from the targets at the FM-CW radar. The basic performances for FM-CWradar were analyzed in computer simulation, and field experiments for detecting target under actual environments.The results showed that the proposed differential detection could only measure the desired targets, and the humanbreathing could also be detected in a hospital scene. Furthermore, under closed multiple targets environments, weshowed the problems for detecting both distance and small displacements of multiple targets at the same time byusing a single radar. Computer simulations were carried out for evaluating the proposed detection method with thetunable FIR filtering for FM-CW radar and analyzing the performance according to the parameters under closedmultiple targets environment. The results in computer simulation showed that the proposed detection method coulddetect both the distance and small displacement correctly under closed multiple targets environment.
TYPE OF PAPER AND KEYWORDS
Regular research paper: FM-CW radar, distance measuring, small displacement measuring, multiple targets detec-tion, tunable FIR filtering
1 INTRODUCTION
Recently, rapidly evolving wireless communication tech-nologies provides us to communicate various informa-tion from a lot of manufactures in widely technologiesfield. IoT (Internet of Things) is popularly known as akey topic for developing system and services, and it en-ables various physical devices to collect various things
such as sensor information. As one of sensing applica-tions, radar has been employed to detect in widely areassuch as on the ground, on the sea, in the air, in space. Theradar systems can detect various information accordingto application areas by transmitted and received throughradio wave.
Radar systems with 24 GHz band is based on ARIB
1

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
VCOD/A BPF
A/D BPF
Signal processing
Signal
FFT
Tx
Rx
!
" #$%&
&'
&(
&)
Target 1
Target
Target
distance from the radar
Display
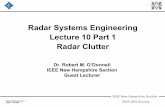
Figure 1: Block diagram of a FM-CW radar system
standard T73 [1] in Japan as sensors for detecting ormeasuring mobile objects for specified low power radiostation. And the 24 GHz band radar system could beapplied in various field such as security, medical imag-ing and so on under indoor and outdoor environments.Various radar systems were reported [2, 3, 4, 5]. Pulsedradar systems can measure the period between the trans-mitted and received signals. The pulsed radar can detectthe distance in far field; however, the target in near fieldcan not be detected correctly. Doppler radar systems canmeasure the frequency difference between the reflectedand transmitted signals. The Doppler radar can detectthe moving velocity of the target; however, the distanceof the target can not be detected. FM-CW (Frequency-Modulated Continuous-Wave) radar systems [6, 7] is themost widely used for detecting the distance of the tar-get object in near field and the small displacement of thetarget.
As previous study, we reported the design, perfor-mance analysis, and applications with 24 GHz bandradar system for detecting both the distance from theradar and the small displacement for human breathing[8]. The radar system could detect both the distance tothe human from the radar and the small displacement ofthe human breathing correctly; however, it was difficultfor detecting the distances and displacements for multi-ple humans at the same time. In order to detect the dis-tances and displacements under closed multiple targetsenvironment, we proposed a detection method for signalprocessing with a tunable FIR filter in the FM-CW radarsystem [9]. Furthermore, performance analysis for FM-CW radar system was shown in computer simulations.In this paper, the proposed detection method consideringboth the differential detection and the tunable FIR filter-ing for detecting both the distances and small displace-ments under single and closed multiple targets environ-ment. Moreover, applications based on IoT for detectingthe human movements in actual scenes were described.
This paper consists of the following sections. In Sec-tion II, we describe the principle of a FM-CW radar sys-
tem and its basic performance under single target envi-ronment. In Section III, we describe the proposed detec-tion method under single target environment. In SectionIV, we describe the proposed detection method undermultiple targets environment. In Section V, we discussthe results of computer simulation and field experiments.Finally, Section VI concludes this paper.
2 FM-CW RADAR SYSTEM
2.1 Principle of FM-CW radar
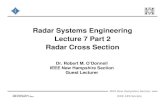
Figure 1 shows the block diagram of a FM-CWradar system [10]. FM-CW (Frequency-ModulatedContinuous-Wave) radar was one type of radar whichwas transmitting a continuous carrier modulated by a pe-riodic function such as a sawtooth wave to provide rangedata shown in Figure 2.
In the FM-CW radar system, frequency modulatedsignal at the VCO is transmitted from the transmitter Tx;then, signals reflected from the targets are received at thereceiver Rx. Transmitted and received signals are multi-plied by a mixer, and beat signals are generated as mul-tiplying the two signals. The beat signal pass through alow pass filter; then, an output signal is obtained. In thisprocess, the frequency of the input signal is varied withtime at the VCO. The modulation waveform with a linearsawtooth pattern [11] as shown in Figure 2. This figureillustrates frequency-time relation in the FM-CW radar,and the red line denotes the transmitted signal and theblue line denotes the received signal. Here, f0 denotesthe center frequency, fw denotes the frequency band-width for sweep, and tw denotes the period for sweep.
We define that the transmitting signal VT (f, x) is rep-resented as
VT (f, x) = Aej2πfc x , (1)
where f denotes a frequency at a time, x denotes a dis-tance between a target and the transmitter, A denotes anamplitude value, and c denotes the speed of light.
2

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
Time
Fre
qu
ency
Transmitted signal
! "
#
Received signal
!
"# $"!
%
"# +"!
%
"#: center frequency
!: bandwidth of sweep frequency
!: sweep time
Figure 2: Sawtooth frequency modulation
The reflected signal VR (f, x) is represented as
VR (f, x) =K∑
k=1
Aαkγkejφkej
2πfc (2dk−x) , (2)
where γk and φk are the reflective coefficients for ampli-tude and phase on kth target, respectively. αk denotes anamplitude coefficient for transmission loss from the kthtarget, and dk is the distance between the transmitter andthe kth target.
Here, at the receiver whose position is x = 0, Equa-tion (2) is rewritten as
VR (f, 0) =K∑
k=1
Aαkγkejφkej
2πfc (2dk) . (3)
The beat signal is generated as multiplying the trans-mitted signal in Equation (1) and the received signal inEquation (3) at the position x = 0. After through LPF,the output signal Vout (f, 0) is generated by
Vout (f, 0) =
K∑k=1
A2αkγkejφkej
4πfdkc . (4)
By using signal processing, a distance and a displace-ment for the target are given from the generated outputsignal in Equation (4). By using the Fourier transform,the distance spectrum of the output signal P (x) is cal-
culated as follow.
P (x) =
∫ f0+fw2
f0− fw2
Voute−j 4πf
c df
=
∫ f0+fw2
f0− fw2
K∑k=1
A2αkγkejφkej
4πfdkc e−j 4πfx
c df
= A2K∑
k=1
αkγkejφk
∫ f0+fw2
f0− fw2
ej4πf(dk−x)
c df
= A2K∑
k=1
[αkγke
jφkej4πf0(dk−x)
c
· fwsinc{2πfw (dk − x)
c
}]. (5)
In this equation, the function of sinc (x) denotes
sinc (x) =sinx
x. (6)
The amplitude value of the distance spectrum |P (x)| inequation (5) is given as
|P (x)| = A2
∣∣∣∣∣K∑
k=1
αkγkejφkej
4πf0(dk−x)c
· fwsinc{2πfw (dk − x)
c
}∣∣∣∣∣≤ A2fw
K∑k=1
[αkγk
·∣∣∣∣sinc
{2πfw (dk − x)
c
}∣∣∣∣]
, (7)
and we have equality if and only if the phase componentsϕk + 4πf0(dk−x)
c about all of k are equal.Here, we assumed that the number of target is 1. The
distance spectrum in equation (5) is rewritten as
P (x) =
[A2α1γ1e
jφ1ej4πf0(d1−x)
c
· fwsinc{2πfw (d1 − x)
c
}], (8)
and the amplitude value of distance spectrum is given as
|P (x)| = A2α1γ1fw
∣∣∣∣sinc{2πfw (d1 − x)
c
}∣∣∣∣ . (9)
This equation indicates that the distance for the target isgenerated by the amplitude value of distance spectrum.
3

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
Table 1: Parameters in computer simulations
Parameters ValuesCenter frequency f0 24.15 (GHz)Bandwidth of sweep frequency fw 50, 100, 200,
400 (MHz)Sweep time tw 1024 (µs)Sampling time for sweep 0.1, 1, 10 (µs)Number of FFT points 4096Window function hamming
The phase value of distance spectrum P (x) is repre-sented as
P (x) = φ1 +4πf0 (d1 − x)
c= θ1 (x) . (10)
Here, θ1 (x) satisfy −π ≤ θ1 (x) ≤ π, then the displace-ment for the target is
−c (−π − φ1)
4πf0≤ d1 ≤ c (π − φ1)
4πf0. (11)
If the phase value satisfies ϕ1 = 0, equation (11) isrewritten as −3.11 [mm] ≤ d1 ≤ +3.11 [mm] withf0 = 24.15 [GHz]. That is, the small displacement ofthe target within ±3.11 [mm] is generated by the phasevalue of distance spectrum.
On the other hands, the maximum distance for mea-suring dmax is
∆f =fw
tw/ts[Hz] ,
dmax =c
4∆f[m] , (12)
where tw denotes the sweep time, ts denotes the intervaltime for sampling. For example, in the case with tw =1024 µs and ts = 1 µs, the maximum distance is dmax =384 [m].
2.2 Analysis of Basic Performances
At first, we describes the basic performance about theFM-CW radar with 24 GHz band. Parameters for com-puter simulation are listed in table 1, and the parameterswere determined as ARIB standard T73[1]. Center fre-quency was 24.15 GHz, bandwidth are 50, 100, 200, and400 MHz. Note that the 400 MHz bandwidth was onlyused for the computer simulation because of standards inthe Radio Law in Japan. Sweep time was 1024 µs, sam-pling times for sweep were 0.1, 1, 10 µs, number of FFTpoints was 4096, and the hamming windows was adaptedas the window function in signal processing.
We assumed that a static target is located at 10 m fromthe transmitter and receiver, and the distance spectrums
50 MHz
100 MHz200 MHz
400 MHz
Sampling time for sweep = 1 !
Measured distance [m]
!
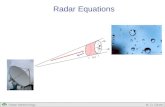
Figure 3: Resolution for distance spectrum accordingto bandwidth of sweep frequency fw.
0.1 "#, 1 "#
10 "#
Measured distance [m]
!
"# = 200 MHz
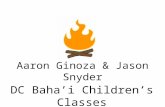
Figure 4: Error value for distance spectrum accord-ing to sampling time for sweep.
are outputted with various parameters. Figure 3 showsthe amplitude value for distance spectrum versus mea-sured distance with various sweep bandwidth. The re-sult shows that the sweep bandwidth influenced the dis-tance resolutions and widely bandwidth could improvethe resolution. In the case with ts = 1 µs, the distanceresolutions with fw = 50, 100, 200, 400 MHz were ±5,±1.5, ±1, ±0.5 m, respectively. Figure 4 shows theamplitude value for distance spectrum versus measureddistance with various sampling time. The result showsthat the sampling interval influenced the error about themeasured distance and shortly sampling interval couldreduce the error value for distance. In the case with fw =200 MHz, the error values about the measured distancewith ts = 10 µs was about 0.5 m.
Figure 5 shows the result for measuring a slowly mov-ing target with fw = 200 MHz and ts = 1 µs. The tar-get moved from 10 m to 20 m at intervals of 0.5 m oneach time step. Figure 5(a) shows the amplitude valueversus measured distance versus target distance with 3-dimensional viewing, and Figure 5(b) shows measureddistance versus target distance with 2-dimensional view-
4

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
Target distanceMeasured distance
!
(a): 3D view.
Target distance
"# = 200 MHz
Sampling time for sweep = 1 !
Mea
sure
d d
ista
nce
Target distance
(b): 2D view.
Figure 5: Distance spectrum for measuring movingtarget.
Target displacement [mm]Mea
sure
d d
isp
lace
men
t [m
m] ! = 200 MHz
Sampling time for sweep = 1 !
Figure 6: Measured displacement.
ing. The color in (b) is corresponding to the strength ofthe amplitude value in (a). From these figures, it wasconfirmed that the distance could be measured correctlyaccording to the positions of the moving target.
Figure 6 shows the result for measuring a target withsmall displacement, and the measured displacement ver-sus target displacement is outputted. The object was lo-cated at 10 m from the receiver, and the object movedfrom -5 mm to 5 mm at intervals of 0.1 mm. The smalldisplacement could be measured by the phase value ofdistance spectrum, and the measured displacement wascorresponding to the target displacement. Note thatthe measured displacement denotes the relative displace-
Spectrums of the other objects: !
Target distance [m]
Mea
sure
d d
ista
nce
[m
]
Spectrum of the target object
! = 200 MHz,
Sampling time for sweep = 1 !
All of spectrums:
(a): without differential detection.
Target distance [m]
Mea
sure
d d
ista
nce
[m
]
Spectrum of the target object
! = 200 MHz,
Sampling time for sweep = 1 !
(b): with differential detection (Proposed).
Figure 7: Distance spectrum for measuring movingtarget distance with / without the differential detec-tion under the environments which multiple objectsare located.
ment and it is not corresponding to the absolute distancebetween the receiver and the target object. The smalldisplacement within ± 3.11 mm was correctly measuredwith the parameters of the FM-CW radar system in thispaper although the displacement more than ±3.11 mmhad uncertainty.
3 PROPOSED TECHNIQUES FOR SINGLE TAR-GET DETECTION
3.1 Detection for single target
As mentioned in the above section, the FM-CW radarsystem could measure the distance and the small dis-placement for single target at the same time. However,it was a special case that only the reflected signal on atarget could be received at the receiver. In general, thereceiver may receive the reflected signals from many ob-jects. Therefore, when there was some objects for mea-suring the target distance, signal processing for detectingthe distance spectrum from the only target would be re-quired.
The proposed method removes the signals from theother objects by using the differential detection of dis-tance spectrum. Figure 7 shows the distance spectrum
5

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
FM-CW radar
Distance
Small displacement
Figure 8: An setting example of FM-CW Radar fordetecting human breathing
when the target object moves from 10 m to 20 m and theother objects are located at 15 m and 20 m. The transmit-ted signal is reflected on the target and the other objects,the receiver receives several reflected signals. Therefore,the distance spectrum of the other objects are also gen-erated by the FM-CW radar system in Figure 7(a), andthe distance spectrum of the target can not be detectedclearly. In particular, when the reflection coefficient ofthe target is lower than that of the other objects, the dis-tance spectrum of the other object has higher amplitudevalue than that of the target.
In the proposed differential detection, at first, the dis-tance spectrum of the other objects P0 is generated be-forehand in Figure 7(a). Then, the distance spectrum ofthe target and the other object P is subtracted by P0.By using the differential detection, distance spectrum re-moved the distance spectrum of the other targets is gen-erated as P − P0. Therefore, the distance spectrum ofthe desired target is only detected. Figure 7(b) shows thedistance spectrum by using the proposed differential de-tection method, and the distance spectrum of the targetis correctly measured. As compared with the measureddistance spectrums in Figure 7(a) and (b), it is clearlyconfirmed that the proposed method can detect target dis-tance by using the difference detection. The proposeddifferential detection can effectively detect the movingor static target distance from multiple reflections of thebackground static objects.
3.2 Field Experiments and Application
3.2.1 Setup condition for field experiments
In order to evaluate the effectiveness of the proposedmethod for detecting the target distance and displace-ment, we developed a FM-CW radar system and carriedout the experiments with the radar system in actual envi-ronment. Table 2 lists the parameters, and the developedFM-CW radar system got a certificate of conformity withtechnical regulations in Article 38-6 Paragraph 1 of theRadio Law in Japan, and developed FM-CW radar sys-tem was accommodate to ARIB standard T73 in Japan[1].
Table 2: Parameters in filed experiments
Parameters ValuesCenter frequency f0 24.15 (GHz)Bandwidth of sweep fre-quency fw
200 (MHz)
Sweep time tw 1024 (µs)Sampling time for sweepts
1 (µs)
Outputting power onTransmitting
7 (mW)
Antenna gain 11 (dBi)Range of distance 0–100 (m)Range of relative dis-placement
±3.11 (mm)
Time [s]
Mea
sure
d d
ista
nce
[m]
(a): without differential detection.
Time [s]
Mea
sure
d d
ista
nce
[m]
(b): with differential detection (Proposed).
Figure 9: Distance spectrum for measuring movingtarget distance with / without the differential detec-tion.
3.2.2 Results in field experiments
Figure 9 shows the distance spectrum of a moving target.A person walked away from the FM-CW radar and thencame close between 2 m to 10 m. In Figure 9(a), severaldistance spectrums of the person and the background ob-jects were outputted. The distance spectrum of the mov-ing person was not clearly detected in Figure 9(a) be-cause of the reflected signals from background objects.In order to detect the distance spectrum of the moving
6

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
Time [s]
Mea
sure
d s
mal
l
dis
pla
cem
ent
[mm
]
5 seconds
Figure 10: Displacement for measuring the move-ment of human breathing.
Time
Mea
sure
d d
ista
nce
[m
]
Time
Mea
sure
d s
ma
ll
dis
pla
cem
ent
[mm
]
1. Without any person
2. Reflection on the human body
3. Breathing detection
(a)
Alert information
Status for individual targets
Types of status
(b)
Figure 11: Example of application.
person with the differential detection method, the dis-tance spectrum without the person was measured before-hand. By generating the distance spectrum of the back-ground objects beforehand, the distance spectrum of themoving person was correctly detected in Figure 9(b) withthe proposed differential detection. Therefore, the FM-CW radar system could measure movement of the targetperson effectively.
Figure 10 shows the result of measuring the smalldisplacement for human breathing. The human’s chestmovement was measured within the range of relativesmall displacement. In Figure 10, it was detected thatthe period of breathing was about 4 s and the breathingmovement was about within ±2 mm.
3.2.3 Example of Application
In this section, we show an example of application with24 GHz FM-CW radar system. Figure 8 shows a setup ofthe FM-CW radar system for detecting human breathingin actual scenes. The FM-CW radar satisfied the safetyguideline, and the details of the safety guideline is de-scribed in Appendix.
Figure 11(a) shows the example of the results for de-tecting human breathing of single target in a room ofa hospital. The distance spectrum in this example wasmeasured as following flow.
1. Measuring distance spectrum without any person.
2. A person comes to the bed. The radar received sig-nals from human’s body.
3. The person lies asleep on the bed. The radar detectsthe person’s breathing movement.
By generating the distance spectrum of the backgroundobjects without the person, the distance spectrum ofthe person was only detected. When the person comeswithin the range of radar, the radar system could detectreflected signals from the person, and the distance spec-trums of the human’s body were detected. After the per-son lied down on the bed, the radar system could detectthe small displacement for the person’s breathing move-ment. By using the differential detection method, the dis-tance and small displacement of the moving object wereclearly detected.
As connecting the developed FM-CW radars in sev-eral rooms in the hospital, detecting several targets couldbe realized. An example of monitoring several targets isshown in Figure 11(b). The developed FM-CW radarswere connected the network system, and the informationof detecting the distance and small displacement weresent to server in nurse station. In the nurse station, sta-tus of several targets could be monitored, and the alertinformation such as falling off the bed and stopping thehuman breathing could be monitored.
4 PROPOSED TECHNIQUES FOR MULTIPLETARGETS DETECTION
4.1 Problems for multiple targets detection
As mentioned in the above section, the FM-CW radarsystem could detect both the distance and displacementcorrectly under single target environments; however, theFM-CW radar could not detect both the distance and dis-placement correctly under closed multiple targets envi-ronments. In order to realize detection for closed mul-tiple targets, we propose the detection method by usingthe signal processing with a tunable FIR filter.
7

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
FM-CW radar
Small displacement
Distance: 1.0mDistance: 2.0m
Small displacement
2.5mm
10.0s
2.0mm
7.5s
Small displacement
Target 1 Target 2
Ceiling
Figure 12: Setup conditions with 2 targets
Distance Time
Sm
all
dis
pla
cem
ent
Only target 1
Only target 2
target 1 + target 2
Po
wer
Time
7.5s
2.0mm
10.0s
2.5mm
Figure 13: Simulated results of detection for closedmultiple targets
4.2 FIR filtering
The procedures of the proposed detection method formultiple closed targets is as follow. We assumed thatthe FM-CW radar is located a short distance from a bedas shown in Figure ??. In this situation, the radio waveswere radiated from the FM-CW radar, and 2 targets lieddown on the bed. The distances from the radar to eachtarget were different, so that the peaks of distance spec-trum were detected at different frequency. In this case,the detected result shown in Figure 13 is sum of these 2targets, and it is difficult for detecting both the distanceand phase values for each user correctly.
In order to solve this problem, signal processing withthe tunable FIR filter was used in the proposed detec-tion method. Figure 14 shows the block diagram of theproposed detection method. At first, the A/D convertedsignal is carried out the FFT operation, and the distance
FFT
1. Peak position
detection
2. Tunable band-
path FIR filter Display
phase value
Display
amplitude value
Signal processing
Signal after
A/D process
For target 1
For target 2
0
0.2
0.4
0.6
0.8
1
0 2 4
Am
pli
tud
e [A
.U.]
Beat frequency [kHz]
2. Tunable band-path FIR filter1. Peak position detection
0
0.2
0.4
0.6
0.8
1
0 2 4
Am
pli
tud
e [A
.U.]
Beat frequency [kHz]
Figure 14: Block diagram of the proposed multipletargets detection in signal processing
Table 3: Parameters in computer simulations
Parameters ValuesCenter frequency f0 24.15 (GHz)Bandwidth of sweep fre-quency fw
100, 200, 400, 800(MHz)
Sweep time tw 256, 512, 1024, 2048(µs)
Bandwidth for FIR filterB
200, 400, 800, 1600,3200 (Hz)
Number of FFT points 4096Window function hamming
spectrum is obtained. After processing the FFT opera-tion, the peaks of amplitude value of the distance spec-trum are calculated for each user. In the peak positiondetection processing, the two frequency value accordingto the targets is obtained; then, FIR filters are designedaccording to the peak positions of desired targets. Thetunable FIR filter has the center frequency correspondingto the calculated frequency in the peak position detec-tion, and the linear property for the phase value. By us-ing the designed FIR filter, band-path filtering operationis carried out for the distance spectrum. After throughband-path filter, the amplitude and phase value for eachtarget are detected correctly.
4.3 Computer Simulations
4.3.1 Setup condition
In order to evaluate the performance for FM-CW radarsystem with the proposed method under multiple targetsenvironment, we carried out computer simulations. Pa-rameters for computer simulations are listed in Table 3,and the parameters are also based on ARIB standard T73
8

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
Table 4: Setup conditions for targets
Parameters Target 1 Target 2Distance 1.0 (m) 2.0 (m)Amplitude of Displacement 2.5 (mm) 2.0 (mm)Period of displacement 10.0 (s) 7.5 (s)
[1]. Center frequency was 24.15 GHz, and frequencybandwidths were 100, 200, 400, and 800 MHz. Notethat the 400 and 800 MHz bandwidth were only used forthe computer simulation because of standards in the Ra-dio Law in Japan. Sweep times were 256, 512, 1024,and 2048 µs, sampling time of sweep was 0.1 µs, num-ber of FFT points was 4096, and the hamming windowswas adapted as the window function in signal process-ing. The bandwidths for FIR filter were 200, 400, 800,1600, and 3200 Hz.
In the following sections, we describe the evaluationvalues for analyzing the results of multiple targets de-tection, and the performance analysis according to band-width for sweep frequency, sweep time, bandwidth forFIR filter, and position of target 2 are described.
4.3.2 Evaluation values for amplitude andphase values
Figure 15 shows the evaluation values for detecting theamplitude and phase values of the distance spectrum ofmultiple targets. As evaluation values, we defined thedegree of amplitude separation for amplitude value andNMSE for phase value.
The degree of amplitude separation is represented by
Sk = 10 log|Pmin||Pk|
= 10 log|P (fmin)||P (fk)|
[dB] ,
(13)
where k denotes the number of target, Sk denotes thedegree of amplitude separation, Pmin denotes minimalvalue of amplitude whose frequency is fmin, and Pk de-notes the peak value for k-th target with frequency of fk.
The NMSE for phase value is represented by
NMSE =N∑i=1
|d′i − di|2
|d′i|2 , (14)
where N denotes the number of sampling points, di andd′i denote the sampled signals of detected and setupedvalues for a target, respectively.
4.3.3 Performance for Bandwidth of sweep fre-quency
Figure 16 shows the evaluation values versus the band-width of sweep frequency fw for amplitude value in (a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5
Am
pli
tud
e [A
.U.]
Beat frequency [kHz]
! "#$ %
Maximal value
! = "!
Maximal value
! = "!
Minimal value
!"# = $!"#
(a): Amplitude
-3
-2
-1
0
1
2
3
0 10 20 30
Sm
all
dis
pla
cem
ent
[mm
]
Time [s]
Detected value
Setuped valueSetuped value !
Detected value !"
(b): Phase
Figure 15: Definitions of evaluation values for com-puter simulation
and phase value in (b). As shown in (a), the degreesof amplitude separation were about -2.5 dB and -19 dBwith fw = 100 MHz and fw = 800 MHz, respec-tively. Because the resolution of the distance spectrumwas increased as an increasing the bandwidth of sweepfrequency, the separation of targets for amplitude valuebecome easily.
As shown in (b), NMSE was about 2 % with the band-width of sweep frequency fw = 100 MHz, and NMSEwas also improved as an increasing the bandwidth ofsweep frequency. Although there was a few disadvan-tage for NMSE of target 2, the multiple targets detectionscould correctly achieved because the degree of amplitudeseparation with -1 dB and NMSE with 6 % were enough
9

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
-24
-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
0 100 200 300 400 500 600 700 800
Deg
ree
of
am
pli
tud
e se
pa
rati
on
[d
B]
Bandwidth of sweep frewuency [MHz]
Target 1
Target 2
! = 1024 "#
$ = 200 Hz
!:
(a): Amplitude
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
6.0%
7.0%
0 100 200 300 400 500 600 700 800
NM
SE
Bandwidth of sweep frequency [MHz]
Target 1
Target 2
! = 1024 "#
$ = 200 Hz
!:
(b): Phase
Figure 16: Evaluation values versus bandwidth ofsweep frequency
values for detecting multiple targets in practical use.
4.3.4 Performance for Sweep time
Figure 17 shows the evaluation values versus the sweeptime tw for amplitude value in (a) and phase value in(b). As shown in (a), the degree of amplitude separa-tion for target 1 kept about -4 dB in accordance not tothe sweep time. The degree of separation for target 2had -1 dB during the sweep time tw = 256 ∼ 1024 µs.In the case with tw = 2014µs, the degree of amplitudeseparation was almost 0 dB. That is, it was difficult todetect the peak value of amplitude for target 2. More-over, compared to the result in (b), the worst NMSE for
-24
-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
0 256 512 768 1024 1280 1536 1792 2048
Deg
ree
of
am
pli
tud
e se
pa
rati
on
[d
B]
Sweep time [us]
Target 1
Target 2
!:
"# = 200 MHz
= 200 Hz
(a): Amplitude
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
6.0%
7.0%
0 256 512 768 1024 1280 1536 1792 2048
NM
SE
Sweep time [us]
Target 1
Target 2
!:
! = 200 MHz
= 200 Hz
(b): Phase
Figure 17: Evaluation values versus sweep time
target 2 was about 4 % with tw = 2048 µs. Becausethe resolution for distance spectrum was decreased as anincreasing the sweep time, the sweep time should be lessthan 1024 µs.
4.3.5 Performance for Bandwidth of FIR filter
Figure 18 shows the evaluation values versus the band-width of FIR filter B for amplitude value in (a) and phasevalue in (b). As shown in (a), the degree of amplitudeseparation for target 1 kept -2 dB in accordance not tothe bandwidth of FIR filter B. When B was more than1600 Hz, the degree was more than -1 dB, therefore, itwas difficult to detect the peak value.
As shown in (b), NMSE for target 1 was less than 3
10

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
-24
-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
0 400 800 1200 1600 2000 2400 2800 3200
Deg
ree
of
am
pli
tud
e se
per
ati
on
[d
B]
Bnadwidth of FIR filter [Hz]
Target 1
Target 2
! = 200 MHz
! = 256 "#
$:
(a): Amplitude
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
6.0%
7.0%
0 400 800 1200 1600 2000 2400 2800 3200
NM
SE
Bandwidth of FIR filter [Hz]
Target 1
Target 2
$! = 200 MHz
! = 256 "#
$:
(b): Phase
Figure 18: Evaluation values versus bandwidth ofFIR filter
%, but NMSE for target 2 was more than 5 % with B =1600 and 3200 Hz. Because the widely bandwidth ofFIR filter was enough not to cut the signal of the othertarget completely, the bandwidth of FIR filter should beless than 1600 Hz.
4.3.6 Performance for distance between targets
Finally, we show the result for detecting multiple targetswhen the target 2 comes close to the target 1 from 2 m to1.5 m. Figure 19 shows the evaluation values versus theposition of target 2 from the radar for amplitude value in(a) and phase value in (b). The position of the target 1was 1 m from the radar.
-24
-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
1 1.2 1.4 1.6 1.8 2
Deg
ree
of
am
pli
tud
e se
per
ati
on
[d
B]
Position of target 2 [m]
5
6
3
4
1
2
Target 1
( !=200 MHz)
Target 2
( !=200 MHz)
Target 1
( !=400 MHz)
Target 2
( !=400 MHz)
Target 1
( !=800 MHz)
Target 2
( !=800 MHz)
! = 256 "#
$ = 200 Hz
(a): Amplitude
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
6.0%
7.0%
1 1.2 1.4 1.6 1.8 2
NM
SE
Position of target 2 [m]
2
2
2
Target 1
( !=200 MHz)
Target 2
( !=200 MHz)
Target 1
( !=400 MHz)
Target 2
( !=400 MHz)
Target 1
( !=800 MHz)
Target 2
( !=800 MHz)
! = 256 "#
$ = 200 Hz
(b): Phase
Figure 19: Evaluation values versus positions of tar-get 2
Compared to the results, the degree of amplitude sep-aration and NMSE become depleted as the target 2 ap-proaches to the target 1. As shown in (a), when the band-width of sweep frequency was more than 400 MHz, thedegree of amplitude separation had good property whichenough to detect the peaks. However, in the case withfw = 200 MHz, the degree for target 2 was about -0.3dB, and it was difficult to detect the peaks.
As shown in (b), when fw was less than 400 MHz,NMSE could be kept about less than 5 %. However, inthe case with fw = 800 MHz, NMSE become depleted.It was difficult to detect peaks of amplitude for targetsas decreasing distance between targets. Therefore, thecenter frequency of FIR filter was not enough to cut the
11

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
other target’s signal, and the imperfect FIR filter influ-enced NMSE values. Although there were a few diffi-culty for determining the parameters of the proposed de-tecting method for FM-CW radar, the proposed detectingmethod could be effective for detecting the distance andthe small displacement at the same time under multipletargets environments.
5 DISCUSSION
As related works, MIT group reported the radar systemfor detecting human breathing in [12]. The system couldalso detect the movement, and the human breathing inthe room could be detected clearly. However, in Japan,the bandwidth for sweep frequency was strongly smallerthan the MIT’s radar system because of the ARIB stan-dard T73. As shown in figure 3, the resolution was de-pending on the bandwidth; therefore, the smaller band-width influence the detected distance and small displace-ment. Moreover, under closed multiple targets environ-ment, some distance between radars and each target mustbe required for separating the distance spectrum of eachtarget. Therefore, in this paper, we used a tunable FIRfiltering method in signal processing for detecting closedmultiple targets at the same time.
6 CONCLUSION
In this paper, a FM-CW radar system with 24 GHz bandwith tunable FIR filter for detecting closed multiple mov-ing targets with small displacements was described. Theproposed detecting method generates tunable FIR filterwhose center frequency is corresponding to the peak po-sitions of distance spectrum of each target. The tunableFIR filtered signal can be detected the distance and dis-placement for each target correctly. In computer sim-ulations, performances of FM-CW radar system underclosed multiple moving targets environment was ana-lyzed in accordance with the bandwidth of sweep fre-quency, sweep time, bandwidth of FIR filter, and the dis-tance between targets. As the result, the 24 GHz FM-CW radar with the proposed detection method could ef-fectively detect both the distance and the small displace-ment for each target under the multiple moving targetsenvironments. And it was confirmed that the proposeddetection method can detect both the distance and smalldisplacement correctly when the distance between tar-gets was 0.5 m.
As future works, we try to hardware implementationof the proposed FIR filtering and the field experiments.
ACKNOWLEDGEMENTS
A part of this work was supported by “Ashita wo NinauKanagawa Venture Project” of Kanagawa in Japan. Theauthors appreciate Prof. Toshio Nojima at HokkaidoUniversity in Japan getting the valuable advices for an-alyzing the safety properties of the developed FM-CWradar system according to the safety guideline.
REFERENCES
[1] ARIB STD-T73 Rev. 1.1, Sensors for Detectingor Measuring Mobile Objects for Specified LowPower Radio Station, Association of Radio Indus-tries and Businesses Std.
[2] S. MIYAKE and Y. MAKINO, “Application ofmillimeter-wave heating to materials processing,”IEICE transactions on electronics, vol. 86, no. 12,pp. 2365–2370, dec 2003.
[3] M. Skolnik, Introduction to Radar Systems. Mc-Graw Hill, 2003.
[4] S. Fujimori, T. Uebo, and T. Iritani, “Short-rangehigh-resolution radar utilizing standing wave formeasuring of distance and velocity of a moving tar-get,” ELECTRONICS AND COMMUNICATIONSIN JAPAN PART I-COMMUNICATIONS, vol. 89,no. 5, pp. 52–60, 2006.
[5] T. Uebo, Y. Okubo, and T. Iritani, “Standing waveradar capable of measuring distances down to zerometers,” IEICE TRANSACTIONS ON COMMUNI-CATIONS, vol. 88, no. 6, pp. 2609–2615, jun 2005.
[6] T. SAITO, T. NINOMIYA, O. ISAJI, T. WATAN-ABE, H. SUZUKI, and N. OKUBO, “Automo-tive fm-cw radar with heterodyne receiver,” IEICEtransactions on communications, vol. 79, no. 12,pp. 1806–1812, dec 1996.
[7] W. Butler, P. Poitevin, and J. Bjomholt, “Benefits ofwide area intrusion detection systems using fmcwradar,” in Security Technology, 2007 41st AnnualIEEE International Carnahan Conference on, Oct2007, pp. 176–182.
[8] K. Yamaguchi, M. Saito, K. Miyasaka, and H. Mat-sue, “Design and performance of a 24 ghz bandfm-cw radar system and its application,” in Wire-less and Mobile, 2014 IEEE Asia Pacific Confer-ence on, Aug 2014, pp. 226–231.
[9] K. Yamaguchi, M. Saito, T. Akiyama,T. Kobayashi, and H. Matsue, “A 24 ghz bandfm-cw radar system for detecting closed multipletargets with small displacement,” in Ubiquitousand Future Networks (ICUFN), 2015 Seventh
12

Kazuhiro Yamaguchi, Mitumasa Saito, Takuya Akiyama, Tomohiro Kobayashi, Naoki Ginoza, Hideaki Matsue: Development of FM-CW RadarSystem for Detecting Closed Multiple Targets and Its Application in Actual Scenes
International Conference on, July 2015, pp.268–273.
[10] M. Skolnik, Radar Handbook, Third Edition.McGraw-Hill Education, 2008.
[11] W. Sediono and A. Lestari, “2d image reconstruc-tion of radar indera,” in Mechatronics (ICOM),2011 4th International Conference On, May 2011,pp. 1–4.
[12] F. Adib, H. Mao, Z. Kabelac, D. Katabi, and R. C.Miller, “Smart homes that monitor breathing andheart rate,” in Proceedings of the 33rd AnnualACM Conference on Human Factors in ComputingSystems, ser. CHI ’15. New York, NY, USA:ACM, 2015, pp. 837–846. [Online]. Available:http://doi.acm.org/10.1145/2702123.2702200
[13] C95.1-2005, IEEE Standard for Safety Levels withRespect to Human Exposure to Radio FrequencyElectromagnetic Fields, 3 kHz to 300 GHz, IEEEStd.
[14] ICNIRP, “ICNIRP STATEMENT on the guidelinesfor limiting exposure to time‐ varying electric,magnetic, and electromagnetic fields (up to 300ghz),” Health Physics, vol. 97, no. 3, pp. 257–258,2009.
[15] Ministry of Internal Affairs and Communicationshttp://www.tele.soumu.go.jp/resource/j/material/dwn/guide38.pdf.
APPENDIX
In general, electromagnetic wave must be satisfied theguidelines on human exposure to electromagnetic fields,where it have been instituted in various organizations.IEEE C95.1 in USA [13] and ICNIRP in Europe [14] arethe guidelines, and MIC also have instituted the guide-line in Japan [15].
Developed 24 GHz FM-CW radar in this paper havethe properties as follow. The power of the transmitter is7 [mW], the transmitting antenna gain is 11 [dBi], theeffective radiated power is 88 [mW], the radiation angleof the transmitting wave is about 50 [degree], and thedistance between the transmitter and the human is 2.5[m]. According to the radar equation, the electric fieldstrength E and the power density P on the human bodyis calculated as
E =
√30× 0.088
2.5= 0.65 [V/m] ,
P =E2
z0=
0.652
120π= 1.12× 10−4 [mW/cm2] .
According to the guideline [15], these parametersmust be satisfied as
E ≤ 61.4 [V/m] ,
P ≤ 1 [mW/cm2] .
Therefore, the developed 24 GHz FM-CW radar systemin this paper sufficiently satisfies the conditions in theguideline.
AUTHOR BIOGRAPHIES
Kazuhiro Yamaguchi wasreceived the M.S. and Ph.Ddegrees in information sciencefrom Hokkaido University,Hokkaido, Japan, in 2009 and2012. He is currently an As-sistant Professor at the TokyoUniversity of Science, Suwa,in Japan. His research interestsinclude Internet of Things,wireless communication, signaland image processing, and
holography.Mitsumasa Saito was receivedthe B.S. degree from Univer-sity of Electro-communications,Tokyo, Japan, in 1978. From1978 to 2006, he has been en-gaged in research and develop-ment of security and multimediadevices, electronic display forconsumer electronics at SONYCorporation in Japan. In 2009,he established company of CQ-S net Inc. Kanagawa, Japan. His
research interests include Internet of Things, radar tech-nology, and signal and image processing.
Takuya Akiyama was receivedthe B.E. degree from Tokyo Uni-versity of Science, Suwa, Japan,in 2014. He is currently workingtoward the M.S degree.
13

Open Journal of Internet of Things (OJIOT), Volume X, Issue X, 20XX
Tomohiro Kobayashi was re-ceived the B.E. degree fromTokyo University of Science,Suwa, Japan, in 2015. He is cur-rently working toward the M.Sdegree.
Naoki Ginoza is currentlyworking toward the B.E. degreeat Tokyo University of Science,Suwa, in Japan.
Hideaki Matsue was receivedthe B.S. and Ph.D degreefrom University of Electro-communications and TokyoInstitute of Technology, Tokyo,Japan, in 1978 and 1993,respectively. From 1978 to2004, he has been engaged inresearch and development ofdigital microwave radio-relaysystem, network architecturefor personal communication at
NTT Electrical Communication Laboratories in Japan.He is currently a Professor at the Tokyo University ofScience, Suwa, in Japan. His research interests includeInternet of Things, network architecture, and wirelesscommunication.
14