Detecting collective behaviour in animal relocation data ...
12
Detecting collective behaviour in animal relocation data, with application to migrating caribou Benjamin D. Dalziel 1,†, *, Mael Le Corre 2 , Steeve D. C^ ot e 2 and Stephen P. Ellner 1 1 Department of Ecology and Evolutionary Biology, Cornell University, Ithaca, NY, USA; and 2 Department of Biology, University of Laval, Quebec, QC, Canada Summary 1. Collective behaviour can allow populations to have emergent responses to uncertain environments, driven by simple interactions among nearby individuals. High-throughput ethological studies, where individual behaviour is closely observed in each member of a population (typically in the laboratory or by simulation), have revealed that collective behaviour in populations requires only rudimentary cognitive abilities in individuals and could therefore represent a widespread adaptation to life in an uncertain world. However, the ecological significance of collective behaviour is not yet well understood, as most studies to date have been confined to specialized situa- tions that allow intensive monitoring of individual behaviour. 2. Here, we describe a way to screen for collective behaviour in ecological data that is sampled at a coarser reso- lution than the underlying behavioural processes. We develop and test the method in the context of a well-studied model for collective movement in a noisy environmental gradient. The large-scale distribution patterns associ- ated with collective behaviour are difficult to distinguish from the aggregated responses of independent individu- als in this setting because independent individuals also align to track the gradient. However, we show that collective idiosyncratic deviations from the mean gradient direction have high predictive value for detecting col- lective behaviour. We describe a method of testing for these deviations using the average normalized velocity of the population. 3. We demonstrate the method using data from satellite tracking collars on the migration patterns of caribou (Rangifer tarandus), recovering evidence that collective behaviour is a key driver of caribou migration patterns. We find moreover that the relative importance of collective behaviour fluctuates seasonally, concurrent with the timing of migration and reproduction. 4. Collective behaviour is a potentially widespread dynamic property of populations that can, in some cases, be detected in coarsely sampled ecological data. Key-words: animal movement, caribou, collective behaviour, flocking, group dynamics, statistical test for collective behaviour, swarming Introduction Many populations exhibit collective behaviour, where local- ized interactions among neighbouring individuals lead to broad-scale patterns in the behaviour of groups, as in the coor- dinated movement of a flock of birds or a school of fish (Vicsek 2001; Vicsek & Zafeiris 2012). Populations influenced by col- lective behaviour violate the assumption of mass action that underlies standard models of population dynamics, in which individuals are viewed as statistically independent (Ovaskainen & Cornell 2006; Pascual, Roy & Laneri 2011). Through emer- gent correlations in behaviour, collectives can track variable resources more effectively than independent individuals (Gr€ unbaum 1998; Simons 2004; Codling, Pitchford & Simpson 2007; Torney, Neufeld & Couzin 2009; Berdahl et al. 2013), leading to increased fitness through population-level cognitive responses to variable environments (Clark & Mangel 1986; Handegard et al. 2012; Ioannou, Guttal & Couzin 2012; Olson et al. 2013). Research on collective decision-making has advanced by identifying the underlying behavioural processes that govern interactions among neighbouring individuals in a population (Nagy et al. 2010; Gautrais et al. 2012; Berdahl et al. 2013; Nagy et al. 2013). Analytical techniques have recently been developed that use fine-scale ethological observations to infer how strongly, and in what ways, individuals are influenced by social interactions (Eriksson et al. 2010; Bode et al. 2012; Gau- trais et al. 2012). The behavioural rules revealed by these anal- yses are often simple, requiring only rudimentary cognitive abilities. Simulations show how simple rules can lead to the emer- gence of collective behaviour. Individuals that aggregate can *Correspondence author. E-mail: [email protected] † Current address: Department of Ecology and Evolutionary Biology, Princeton University, 106A Guyot Hall, Princeton, NJ 08544, USA © 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society Methods in Ecology and Evolution 2016, 7, 30–41 doi: 10.1111/2041-210X.12437
Transcript of Detecting collective behaviour in animal relocation data ...

Detecting collective behaviour in animal relocation
data, with application tomigrating caribou
BenjaminD. Dalziel1,†,*, Mael LeCorre2, SteeveD. Cot�e2 andStephenP. Ellner1
1Department of Ecology andEvolutionary Biology, Cornell University, Ithaca, NY, USA; and 2Department of Biology, University
of Laval, Quebec, QC, Canada
Summary
1. Collective behaviour can allow populations to have emergent responses to uncertain environments, driven by
simple interactions among nearby individuals. High-throughput ethological studies, where individual behaviour
is closely observed in each member of a population (typically in the laboratory or by simulation), have revealed
that collective behaviour in populations requires only rudimentary cognitive abilities in individuals and could
therefore represent a widespread adaptation to life in an uncertain world. However, the ecological significance of
collective behaviour is not yet well understood, as most studies to date have been confined to specialized situa-
tions that allow intensivemonitoring of individual behaviour.
2. Here, we describe a way to screen for collective behaviour in ecological data that is sampled at a coarser reso-
lution than the underlying behavioural processes.We develop and test themethod in the context of a well-studied
model for collective movement in a noisy environmental gradient. The large-scale distribution patterns associ-
ated with collective behaviour are difficult to distinguish from the aggregated responses of independent individu-
als in this setting because independent individuals also align to track the gradient. However, we show that
collective idiosyncratic deviations from the mean gradient direction have high predictive value for detecting col-
lective behaviour. We describe a method of testing for these deviations using the average normalized velocity of
the population.
3. We demonstrate the method using data from satellite tracking collars on the migration patterns of caribou
(Rangifer tarandus), recovering evidence that collective behaviour is a key driver of caribou migration patterns.
We find moreover that the relative importance of collective behaviour fluctuates seasonally, concurrent with the
timing ofmigration and reproduction.
4. Collective behaviour is a potentially widespread dynamic property of populations that can, in some cases, be
detected in coarsely sampled ecological data.
Key-words: animal movement, caribou, collective behaviour, flocking, group dynamics, statistical
test for collective behaviour, swarming
Introduction
Many populations exhibit collective behaviour, where local-
ized interactions among neighbouring individuals lead to
broad-scale patterns in the behaviour of groups, as in the coor-
dinatedmovement of a flock of birds or a school of fish (Vicsek
2001; Vicsek & Zafeiris 2012). Populations influenced by col-
lective behaviour violate the assumption of mass action that
underlies standard models of population dynamics, in which
individuals are viewed as statistically independent (Ovaskainen
& Cornell 2006; Pascual, Roy & Laneri 2011). Through emer-
gent correlations in behaviour, collectives can track variable
resources more effectively than independent individuals
(Gr€unbaum1998; Simons 2004; Codling, Pitchford&Simpson
2007; Torney, Neufeld & Couzin 2009; Berdahl et al. 2013),
leading to increased fitness through population-level cognitive
responses to variable environments (Clark & Mangel 1986;
Handegard et al. 2012; Ioannou, Guttal &Couzin 2012; Olson
et al. 2013).
Research on collective decision-making has advanced by
identifying the underlying behavioural processes that govern
interactions among neighbouring individuals in a population
(Nagy et al. 2010; Gautrais et al. 2012; Berdahl et al. 2013;
Nagy et al. 2013). Analytical techniques have recently been
developed that use fine-scale ethological observations to infer
how strongly, and in what ways, individuals are influenced by
social interactions (Eriksson et al. 2010; Bode et al. 2012;Gau-
trais et al. 2012). The behavioural rules revealed by these anal-
yses are often simple, requiring only rudimentary cognitive
abilities.
Simulations show how simple rules can lead to the emer-
gence of collective behaviour. Individuals that aggregate can
*Correspondence author. E-mail: [email protected]†Current address: Department of Ecology and Evolutionary Biology,
PrincetonUniversity, 106AGuyotHall, Princeton,NJ 08544,USA
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society
Methods in Ecology and Evolution 2016, 7, 30–41 doi: 10.1111/2041-210X.12437

pool their estimates of a noisy environmental gradient, allow-
ing improved navigation for the group (Simons 2004). Align-
ing velocities with neighbours can improve navigation by
simulated groups (Gr€unbaum 1998; Codling, Pitchford &
Simpson 2007; Torney, Neufeld & Couzin 2009). A collective
response can occur even if only some individuals have informa-
tion about the environment, and the informed individuals are
not distinguishable by the others (Couzin, et al. 2005, 2011).
The theoretical and empirical research to date therefore sug-
gests that collective behaviour could be a widespread adapta-
tion to life in an uncertain world, with an important influence
on ecological and evolutionary dynamics (Franks et al. 2002;
Saigusa et al. 2008; Torney, Neufeld & Couzin 2009; Hande-
gard et al. 2012; Ioannou, Guttal & Couzin 2012; Aplin et al.
2014; Farine et al. 2014).
However, the role of collective behaviour in the ecological
and evolutionary dynamics of populations remains largely
unexplored, because few populations are intensively sampled
at the scale of individual behavioural decisions. Existing meth-
ods developed for high-throughput ethological data (Eriksson
et al. 2010; Nagy et al. 2010; Bode et al. 2012; Gautrais et al.
2012; Berdahl et al. 2013; Nagy et al. 2013) may in some cases
work on coarser scale data, but this remains largely untested.
In general, scaling up from fine-scale patterns to course scale
process is an enduring problem in ecology (Levin 1992).
In this paper, we suggest an approach to screen for collective
behaviour in ecological data – data on the distribution patternsof organisms collected at a coarser scale than the underlying
behavioural processes (Levin 1992) – to help identify systems
where more detailed studies of the role of collective behaviour
may be fruitful. Because the informationwe have onmost pop-
ulations is not resolved to the level of individual behavioural
interactions, this paper focus on detecting population-level fea-
tures of collective behaviour that are robust to changes in the
details of the underlying individual interactions. This addresses
the inverse problemof distinguishing collective behaviour from
the aggregated responses of independent individuals, when the
causal behaviours are not observed (Perony et al. 2012; Sump-
ter,Mann& Perna 2012). In general, canonical models of pop-
ulation dynamics assume that each individual’s response to the
environment is independent. To understand changes in real
populations over time, it may sometimes be useful to test
whether this assumption holds.
Potts, Mokross & Lewis (2014) have addressed the broader
goal of integrating collective behaviour into models of the spa-
tial dynamics of animal populations, for instance using cou-
pled step selection functions. In a complimentary paper,Mann
(2011) describes a Bayesian approach for determining the
interaction rules that generate collective behaviour from very
fine-scale data on animalmovements, finding that the rules can
often been uncovered with relatively small ethological data
sets. A related modelling approach, based on hidden Markov
models, has shown how the combined effects of environmental
variation and social cues may be disentangled when positional
data and environmental covariates are available for a single
animal group (Langrock et al. 2014). A recently described
approach for detecting the influence of conspecifics on popula-
tion distribution patterns tests the extent to which the proxim-
ity between individuals can be attributed to independent
randomdisplacements (Delgado et al. 2014).
Like Delgado et al. (2014), the approach we describe uses
a comparison with what independent individuals would do
as a basis for detecting collective behaviour. Instead of
attempting to parameterize a model of collective behaviour,
we focus on measuring emergent features of population
redistribution patterns that are fundamental to collective
behaviour, would be unlikely to occur in an ensemble of
independent individuals, and are robust to unobserved indi-
viduals, as well as to data observed at much coarser scale
than the underlying movement decisions. Our approach
focuses on animal relocation data, but it generalizes straight-
forwardly to other movement data and to other kinds of
changes in individual state.
To demonstrate the approach, we first use a well-studied
model of collective animal movement (Couzin et al. 2005)
implemented in an environment that has a gradient represent-
ing the population’s preferred direction of travel. The environ-
ment is noisy, so that at each place and time an individual’s
experience of the gradient varies. The appearance of broad-
scale order among gradient followers is not diagnostic of col-
lective behaviour. However, populations influenced by collec-
tive behaviour show collective idiosyncratic deviations from
the true gradient direction that are visible in sparsely sampled
data, and are statistically unlikely for independent individuals,
regardless of the behavioural rules that independently govern
each of their trajectories. That is, individuals all heading in the
right direction might be independently reading the environ-
ment accurately. But individuals all heading in roughly the
same wrong direction are probably not acting independently.
We show that these ‘collective mistakes’ represent a character-
istic feature of collective behaviour that can be detected in
sparsely sampled ecological data.
Finally, we demonstrate the method on a novel set of wild-
life data – observations of the migration patterns of caribou
(Rangifer tarandus) collected by satellite tracking collars. The
data encompass 9721 observations of 143 individuals from
2008 to 2011. Applying the method we describe to the caribou
data reveals a major role of collective behaviour in one of the
world’s longest terrestrial migrations.
Methods
ANALYTICAL APPROACH
The approach we propose considers a group of N individuals whose
locations change continuously in space and time. However, the data
are limited to observations of individual locations at M discrete time
points t1; t2; . . .; tM. Sampling periods sj ¼ tj � tj�1 measure the tem-
poral separation between ‘bouts’ of observation, wherein each individ-
ual’s location is recorded. Let xiðtjÞ represent the cartesian coordinates
of the ith individual observed at time tj. As a spatial location, x is a vec-
tor with length equal to the number of dimensions of the ‘landscape’ in
which individuals move. For example, in applications involving
terrestrial animals, the landscape will typically be two-dimensional, so
the vector x will have two elements (storing longitude and latitude, for
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 31

instance). Aquatic or avian applications may include altitude or depth
as a third coordinate. The velocity vi of an individual i associated with a
pair of adjacent sampling times is also a vectorwith the same dimension
as the position vectors, which gives the magnitude jvij (the observed
‘speed’ of individual i) and direction vi=jvij of the change in position
over time. It is estimated from location data as
viðtj; sjÞ ¼ xiðtjÞ � xiðtj�1Þsj
; j[ 1 eqn 1
and thus can vary with different sampling periods, as well as over time
and among individuals.
Throughout the paper, equations will include addition and multipli-
cation of vectors (e.g. location, velocity) and scalars (e.g. time), without
explicit remark, because the type of operations (i.e. vector or scalar) will
be evident from which types of variables are involved. For readers not
accustomed to vector operations, a heuristic approach to the equations
is to imagine a one-dimensional landscape where individuals can travel
only left or right (for instance, towards or away from a goal). Then,
location and velocity vectors will only have one element, and all opera-
tions reduce to scalar arithmetic.
Awell-studiedmeasure of collectivemovement is the following order
parameter, which is calculated using individual observed velocities
wðtj; sjÞ ¼ 1
N
XN
i ¼ 1
viðtj; sjÞviðtj; sjÞ�� ��
�����
����� eqn 2
and represents the average normalized velocity of the population at
time tj. In the limit, as N becomes large, wðtj; sjÞ ranges from 0, when
individual velocities have uniform random directions, to 1, when indi-
vidual velocities all have the same direction (Vicsek & Zafeiris 2012).
The intuition, which is similar to the mean resultant length from circu-
lar statistics, is that independent velocities will tend to be evenly dis-
tributed among all possible directions, and will thus cancel each other
out when they are summed. Thus in the case of independent random
velocities, the summed vector will have a magnitude that approaches 0.
By contrast, if velocities are non-independent (because animals are
interacting), then they may tend to all point in a common direction.
Their sum will also point in that direction with significant magnitude,
resulting in a higher value forw.We note that animalsmay also interact
by adjusting their speed as well as the direction of their velocity
(Berdahl et al. 2013), so although intuitive and well studied, this statis-
tic does not necessarily capture all aspects collective behaviour.
The sampling period s is typically <1 second in ethological studies of
collective behaviour (Couzin et al. 2005; Nagy et al. 2010; Berdahl
et al. 2013). However in ecological data, swill typically be much larger,
as the spatial distribution of organisms is usually sampled at discrete
and relatively distant times in ecological studies, rather than in nearly
continuous time. Correspondingly, we now consider the behaviour of
the order parameter for finite populations whose positions are sampled
at discrete time points that can be arbitrarily distant.
We begin with the null case where individuals’ velocities are indepen-
dent of one another. Suppose individuals move in a two-dimensional
environment that has a gradient with direction vector / = (0,1) which
represents the preferred direction of travel for each individual in the
population. Because individuals move independently from one
another, the spatial distribution of the population will follow an advec-
tion–diffusion process(Skellam 1951; Patlak 1953; �Okubo & Levin
2001; Machta et al. 2013). If independent individuals’ movement
directions are temporally autocorrelated, such as would be the case
for correlated random walks, the population will converge to
advection–diffusion dynamics at time-scales longer than the range of
the temporal autocorrelation (Patlak 1953).
Advection–diffusion processes are governed by the relative values of
two parameters. The advection parameter ɛ represents the perceived
strength of the environmental gradient. The parameter d controls the
rate of diffusion, representing random movement not associated with
following the preferred direction.As ɛ increases while d is held constant,individual velocities become increasingly aligned in the preferred direc-
tion of travel, all else equal. Fixing ɛ, higher values of d can represent a
‘noisier’ environment, where each individual’s estimate of the preferred
direction of travel at a given time is increasingly uncertain. If a popula-
tion of independent individuals is released at the point (0,0) and
observed s seconds later, their spatial distribution will approximate a
bivariate Gaussian distribution, where the mean spatial location of an
individual (in cartesian coordinates) is given by ɛ/s = (0,ɛs) and vari-
ance and covariance in positions among individuals are given by the
variance–covariance matrix sdI, where I is the identity matrix. Note
that variance in location grows linearly with time in advection–diffu-
sion, which is why the variance–covariance matrix has a factor of s.
This process can be simulated by sampling from the appropriately
parameterizedGaussian distribution.
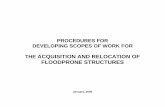
We calculated the order parameter wðtj; sjÞ on simulated advection–
diffusion data for a range of population sizes, strengths of environmen-
tal bias, and sampling periods (Fig. 1). This demonstrates the intuitive
result that ecological data on individual movements can display highly
ordered velocities even when individuals are moving independently.
This order can be generated by chance in smaller populations, where
there is a higher probability that velocities will be aligned by pure
chance (Fig. 1a), by a strong environmental gradient that dominates
the effect of noise, and by longer sampling intervals which reduce the
effect of noise by averaging it over a long time period (Fig. 1b). Detect-
ing collective behavior in ecological data therefore requires a different
statistic, that attains distinctly different values for independent indivi-
duals and collectives.
Define v0 as the expected value for vi if individuals were acting inde-
pendently. As a model for what independent individuals would do, v0
could be complex and we return to the issue of determining v0 below,
addressing in particular the case when the preferred direction, /, variesover space and time. To introduce our approach, we focus on the sim-
ple case where/ is constant over the period of observation. In that case,
if individuals are independent, the velocity of each individual at each
time is a random draw from the same probability distribution. We can
then estimate v0 by themean of all observed velocities and sowe set
v0 ¼ 1
MN
XM
j ¼ 1
XN
i ¼ 1
viðtj; sjÞ eqn 3
which includes all time points. In other words, if/ is constant, then the
overall mean velocity over time is a good model for the expected veloc-
ity of any one independent individual, at any time. This works because
independent individuals do not interact with one another and so, in
with a spatiotemporally invariant environmental gradient, their veloci-
ties are exchangeable across time points.
Now consider an adjusted velocity
�viðtj; sjÞ ¼ viðtj; sjÞ � v0ðtj; sjÞ eqn 4
and the corresponding adjusted order parameter
�wðtj; sjÞ ¼ 1
N
XN
i ¼ 1
�viðtj; sjÞ�viðtj; sjÞ�� ��
�����
����� eqn 5
which is identical to eqn 2 except that it is calculated with adjusted
velocities �vi instead of raw velocities vi. As with velocities vi and the
order parameterw, the adjusted order parameter �w is a function of time
t and sampling period s. However we will sometimes write these func-
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
32 B. D. Dalziel et al.

tions with their arguments suppressed for visual clarity. When we do
so, comparisons of the value of a function under different circum-
stances (e.g. ‘the value of �w is higher than . . .’) imply that the compar-
ison is being done at an arbitrary time point and sampling period,
unless otherwise indicated (Fig. 1c).
The value of the �w tends to be lower thanw for independent individu-
als, meaning that adjusted velocities, �vi, are less ordered than raw veloc-
ities vi for independent individuals. This is because the subtraction of v0
in eqn 4 removes some of the order that is due to individuals heading in
the same direction independently – either by random chance or because
of exposure to a common environmental gradient. As a result, �w is less
influenced by population size (Fig. 1c) and is unaffected by the strength
of the environmental gradient or the length of the sampling interval s
(Fig. 1d).
Whereas �w tends to be low for ecological data on independent indi-
viduals, we hypothesize that increasing levels of collective behaviour
lead to increases in the value of �w. Increased values of �w for populations
influenced by collective behaviour are not due to increases in their abil-
ity to travel in the true gradient direction (the effect of travelling further
up the gradient is removed by the subtraction of v0 in eqn 4), or
because collective behaviour increases alignment in the gradient direc-
tion (because an improved overall alignment is also captured by v0).
Rather, the proposed mechanism is that at any moment, a population
influenced by collective behaviour will have its own idiosyncratic devia-
tion from the true gradient direction, due to the propagation to larger
scales of interactions between nearby individuals.
These ‘collective mistakes’ cause adjusted velocities in collectives –
calculated using eqn 4) – to bemore polarized for groups of individuals
sampled at similar times, compared to individuals sampled at different
times. This leads naturally to a test for collective behaviour, based on
comparing �w to the value of a null statistic �w0, obtained by calculating�w on a randomized data set where the adjusted velocities for each indi-
vidual have been randomly shuffled in time. This breaks correlations
among individuals observed at the same (randomized) time. If such cor-
relations do not exist because individuals are moving independently,
the time randomization will not affect statistical properties of the data.
Ecological data on the distribution patterns of a single population over
time can be tested for collective behaviour by testing the hypothesis that�w [ �w0 (see Fig. 3a).
COLLECTIVE BEHAVIOUR MODEL
To demonstrate our method for detecting group decision-making in
ecological data, we simulated data from well-studied model for collec-
tive behaviour (Couzin et al. 2005). The model is implemented in an
unbounded environment and observed over a long period relative to
the time step of the simulation (the model steps forward 0�2 s at a time,
and we observe it for four simulation hours). As above, the environ-
ment has a gradient with a constant mean direction, and uniform noise
that is independent and identically distributed over space and time. The
environmental gradient represents the preferred direction of travel for
individuals when acting independently of social cues.
At each time step, individual velocities in themodel are given by
viðtþ hÞ ¼ hvðtÞii þ agi þ zi eqn 6
followed by rescaling to unit length
viðtþ hÞ ! viðtþ hÞjviðtþ hÞj eqn 7
where the vector viðtÞ is the velocity of the ith individual at time t, and
the time step of themodel is h. hvðtÞii represents the velocity chosen by iin response to the positions and velocities of its neighbours, as detailed
below. Individuals are constrained by a maximum turning angle, such
that the interior angle between viðtþ hÞ and viðtÞ can be atmost hmax.
The random variable gi represents the preferred direction of travel as
it is perceived by individual i at time t. As above, we assume a two-di-
mensional world in which the true preferred direction is the vector /.Each time step, an individual has access to a noisy estimate of the gradi-
ent that has unit magnitude and deviates from the true direction by an
angle hg, which is uniformly distributed on the interval ð�rg;rgÞ. Anindividual weighs gi in their final desired velocity according to the
gradient response parameter a. When a becomes large, individuals
move independently from one another.
Population size, N
Ord
er p
aram
eter
,
101 102 103
0·0
0·5
1·0
0·00 0·05 0·10 0·15 0·20
Ord
er p
aram
eter
, 0·
00·
51·
0
N = 16N = 256
4 h
10 min
Population size, N
Adj
uste
d or
der,
101 102 103
0·0
0·5
1·0
Environmental bias, (m s–1)
0·00 0·05 0·10 0·15 0·20Environmental bias, (m s–1)
Adj
uste
d or
der,
0·0
0·5
1·0
N = 16N = 256
(a) (b)
(c) (d)
Fig. 1. Order in the movements of indepen-
dent individuals exposed to environmental
gradients of varying strength with noise level
d = 1. Horizontal axes in each pane comprise
100 points, with 100 replicates per point.
Outer, lighter polygons extend vertically from
the 5th to the 95th percentile; inner darker
polygons encompass the interquartile range.
(a) Order parameter for populations of vary-
ing size in the absence of an environmental
gradient (ɛ = 0). (b) Order parameter for
populations subject to varying strengths of
environmental bias, for small (yellow) and
large (purple) populations, sampled after 10
minutes (lower curve) and four hours (upper
curve). Panes (c) and (d) show the same analy-
sis as (a) and (b) using the adjusted order
parameter. Variation in sampling time has no
effect on the value of the adjusted order
parameter for independent individuals, so the
polygons for each of the two sampling periods
are on top of one another.
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 33

The vector zi represents random error in velocity. zi is a randomly
chosen point on a circle centred at (0,0) with radius rz. The larger the
value of rz, the less an individual’s velocity is based on cognitive
responses to the environment or to the locations and velocities of its
neighbours. As rz becomes large, each individual performs a random
walk.
hvðtÞii is chosen based on the locations and velocities of i’s neigh-
bours as follows. Each time step, an individual’s first priority is collision
avoidance. If there are other individuals within the ball with radius ra,
representing the focal individual’s zone of avoidance, then hvðtÞiipoints away from themean direction to those individuals.
If there are no individuals within the focal individual’s zone of avoid-
ance, then hvðtÞii is based on the positions and velocities of neighbours
within the zone of social interaction, a ball with radius rs [ ra. hvðtÞiiis then the average of the vector towards the centroid of i’s neighbours,
and the vector representing the mean velocity of those neighbours.
hvðtÞii is always normalized to have unit magnitude.
An individual’s position changes over time according to
xiðtþ hÞ ¼ xiðtÞ þ fviðtþ hÞ eqn 8
where f is the speed of each individual. Note that spatial variation is
implicit in the model because at each time t, individual i is at a specific
location xiðtÞ. The preferred direction in the environment, and individ-
uals’ perceptions of their neighbours’ locations and velocities thus vary
spatially as well as temporally.
To summarize the model, simulated populations attempt to follow a
noisy environmental gradient with constant mean direction using a
mixture of individual- and group-level cognitive responses. The balance
between the two types of cognition is determined by the gradient
response parameter a, with increasing values of a representing increas-
ing independence among individuals. In each simulation, we obtained
ecological data at a coarse scale representing the net effect of many
movement decisions by recording the spatial distribution of the popula-
tion every 10 min for 4 h. The parameterizations we used are shown in
Table 1, and follow Couzin et al. (2005). The sensitivity of the emer-
gent dynamics of this model to variation in the parameter values has
been previously explored in Couzin et al. (2002). Although collective
behaviour can give rise to different complex patterns under different
parameterizations of the model and initial conditions, polarization
order in velocities among nearby individuals is a ubiquitous symptom
of collective movement. This polarization is the feature that is the focal
point for ourmethod.
In themodel presented here, the control parameter a is applied to theterm representing gradient response, gi. However, themodel could also
have also been formulated by applying the control parameter to the
term representing collective behaviour, hvðtÞii.We note that associating
a with gi in our formulation has a side effect, which is that as the rela-
tive strength of collective alignment increases, the relative contribution
of random error also increases, due to normalization of the velocities at
each simulation step. However, in all cases the magnitude of the ran-
dom error is small relative to the other terms in the equation. For exam-
ple, even when collective behaviour is very strong (alpha approaching
0), so that the relative contribution of noise is also strong, the magni-
tude of the noise vector is at most 2% of the overall magnitude of the
velocity. Moreover, increasing noise with increasing collective beha-
viour causes the residual velocities of nearby individuals to be less
polarized, reducing the value of our test statistic. Therefore, this side
effect of the structure of ourmodel renders the test more conservative.
In many applications, the preferred direction of travel / will vary
over space and time. In these cases, it will be necessary to learn how /changes and incorporate that into estimates of v0ðt; sÞ. This could be
done by straightforward estimates of the response of independent indi-
viduals to the state of the environment [for example, connecting gradi-
ents in light levels to the swimming speed of fish (Berdahl et al. 2013),
or to the velocity of phytoplankton (Mitbavkar & Anil 2004)]. As an
example of applying our approach in this context, we conducted a ser-
ies of two identical experiments using the collective behaviour model.
Each experiment consisted of running the collective behaviour simula-
tion with a gradient direction that changes deterministically over time.
Data from the first experiment were used to estimate the gradient direc-
tion over time, while data from the second experiment were used to test
for the strength of collective behaviour. From the first experiment, we
estimate the gradient direction over time by fitting a cubic spline to the
velocity data from all individuals. We then apply our approach for
detecting collective behaviour to the velocity data from the second
experiment using the spline-smoothed velocity from the first experi-
ment as v0ðt; sÞ. As above, this approach uses small but significant col-
lective deviations from the true gradient directions (which is estimated
independently) to detect collective behaviour. In some applications
(such as the cariboumigration analysis), one set of observations is suffi-
cient for both detecting the gradient and analysing collective deviations
from it.
DETECTING COLLECTIVE BEHAVIOUR IN CARIBOU
MIGRATION PATTERNS
We applied our method to data on the migration patterns of the Riv-
i�ere-aux-Feuilles caribou herd inNorthernQu�ebec, Canada (LeHenaff
1976). The herd has varied in size from approximately 56 000 individu-
als in 1975 to at least 628 000 in 2001, to approximately 430 000 in
2011 (Le Henaff 1976; Couturier et al. 2010; Taillon, Festa-Bianchet &
Cot�e 2012). These caribou usually overwinter in the boreal forest in the
southern Ungava peninsula. Each spring they migrate up to approxi-
mately 1200 km to calving grounds located on the northern part of the
peninsula, in tundra. Tundra is a highly seasonal environment, and the
arrival on the calving ground is synchronized with the peak of produc-
tivity of the vegetation at the onset of the short growing season (Post &
Forchhammer 2008). Almost all females return to the same calving
ground each year (Boulet et al. 2007).
The data consist of 9721 observations of the locations of 143 caribou
observed over three years (2008–2011). Caribou were captured using
net guns fired from a helicopter and handledwithout chemical immobi-
lization. The data were collected using Argos tracking collars (Service
Table 1. Simulation parameters
Parameter Interpretation Value
h Time step 0�2 s
ra Radius of avoidance 1 m
rs Radius of social interaction 6 m
f Speed 1 m s�1
hmax Maximum turning angle 2 rad
hg Environmental noise 2�5hz Individual noise 0�02N Population size 256
M Number of replicates 10
s Sampling period 10 min
a Gradient response
parameter
0�125, 0�25,0�5, 1, 2, 4, 8, 16, 32
Initial positions Uniformwithin
a 30 9 30 m square
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
34 B. D. Dalziel et al.

Argos Inc., Largo, MD, USA) that record the locations of animals
every 5 days (120 h � 1�66 SD). The median observation period for a
single animal in the data is 320 days, with approximately 30 unique
individuals observed on average during any month. These data repre-
sent an unbiased subsample of the movement patterns of the herd that
is small relative to the size of the herd, but large relative to most empiri-
cal studies of animalmovement patterns to date.
We assumed caribou respond independently to environmental and
physiological migratory cues that vary spatially and seasonally, in addi-
tion to a potential influence of collective behaviour. We therefore esti-
mated v0ðx; tÞ – the expected velocity of independent caribou as a
function of space and time – by smoothing the observed velocities of
caribou observed in similar spatial locations at similar times of year,
using a weighted average. Based on preliminary analysis, the weighted
average for a given location and time of year was calculated using tricu-
bic kernel (Hastie, Tibshirani & Friedman 2008) with a spatial band-
width of 170 km and a temporal bandwidth of 30 days. The results of
this analysis are qualitatively identical using other kernel functions and
over awide range of other spatial and temporal bandwidths.
After calculating v0, the application of our method for detecting col-
lective behaviour consists of obtaining adjusted velocities by subtract-
ing velocities predicted by v0ðx; tÞ, from observed velocities for the
caribou. We then calculate �w using eqn 5. In order to test whether the
strength of collective behaviour varied seasonally and spatially, we cal-
culated the value of �w in a spatiotemporal neighbourhood surrounding
each observed caribou location, by including other caribou velocities
that were observed within 20 km and 24 h of that point. We chose
these inclusion criteria to minimize the spatial and temporal widths of
the ‘bins’ for �w (thus focusing on caribou whoweremore likely to actu-
ally interact), while simultaneously maintaining enough observations
at a particular location and time to apply the method. As above, the
results of this analysis are qualitatively identical using over awide range
of other spatial and temporal bandwidths. In general, the appropriate
smoothing function and bandwidths for ourmethodwill depend on the
sampling properties of the data. As the final step in the analysis, we cal-
culated the null statistic �w0 using a repeated randomization procedure
by sampling with replacement from the entire data set the same number
of velocities as were included in that calculation of �w for each caribou.
Results
DETECTING COLLECTIVE BEHAVIOUR IN SIMULATED
DATA
At the maximum value of the gradient response parameter we
examined (a = 32), individual velocities are nearly indepen-
dent. Correspondingly, populations at that level of a follow
the spatiotemporal patterns predicted by advection–diffusion(Fig. 2a,c,d). In particular, in multiple replicate runs of the
model, populations of independent individuals tend to the
same broad-scale spatial distribution in all replicates, because
X (m)
Y (
m)
X (m)
Y (
m)
X (
m)
Gradient response, α
Y (
m)
(a) (b)
(c)
(d)
Fig. 2. Contrasting collective behaviour with
the aggregated responses of independent indi-
viduals using ecological data. (a,b) Distribu-
tion over space and time for model individuals
released at the origin and heading upwards in
a noisy environmental gradient. The cool col-
ours (blues and greens) show 10 replicate
model runs for nearly independent gradient
followers (a = 32). The hot colours show 10
replicate runs for populations that exhibit col-
lective behaviour (a = 0�5). (c) Distribution
perpendicular to the gradient direction at the
end of four hours for varying levels of collec-
tive behaviour, with each replicate for a given
value of a shown side by side. Boxes enclose
the interquartile range, and lines enclose the
entire range of the data. Colours correspond
to those in the previous panes. (d)Distribution
parallel to the gradient direction.
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 35

the velocities of independent individuals are exchangeable over
space and time. In contrast, lower values of the gradient
response parameter lead to systematic differences in velocity
over time and among replicates (Fig. 2b). These systematic dif-
ferences are driven by social interactions among neighbouring
individuals that scale up to cause population-level idiosyn-
cratic deviations from the preferred direction of travel – ‘collec-tive mistakes’ (Fig. 2b,c). At the same time, scaling up local
conspecific interactions is what advantages collectives over
independent individuals in variable environments, enabling
populations with collective behaviour to travel more quickly
and precisely in the preferred direction of travel (Fig. 2d). This
effect persists until values of a become so low that individuals
cease to respondmuch to the gradient. In this case, the popula-
tion still ‘drifts’ in the direction of the gradient, while maintain-
ing a highly heterogeneous spatial distribution (e.g. a = 0�125in Fig. 2c,d).
Because populations of independent individuals also align
to follow the gradient, alignment of movements in the gradient
direction is not sufficient evidence for collective behaviour in
ecological data. However, alignments that involve broad-scale
group-level deviations from the mean gradient direction do
have a higher predictive value for identifying collective beha-
viour, particularly when the underlying behaviours are not
observed. Group idiosyncratic deviations from the mean pre-
ferred direction generate significantly more order in observed
velocities at a particular time, compared with average velocity
over time, leading to increased values for �w in populations
influenced by collective behaviour (Fig. 3). The collective mis-
takes that produce this difference are the result of patterns in
which a large portion of the population travels in a certain
common direction at a particular time, but where that direc-
tion varies randomly over time. These dynamics are highly
unlikely for populations of independent gradient followers,
where independent trajectories, by definition, are as likely to
show similarity within a given sampling period as among sam-
pling periods.
The adjusted order parameter �w is correlated with the gradi-
ent response parameter a (R2 ¼ 0 � 49, P < 0�0001, for linearregression of �w as a function of log a, with each observation
time in each replicate as a single data point; R2 ¼ 0 � 5,P < 0�0001 on average when the analysis is done on a single
replicate). While the value of �w fluctuates over time points and
replicates, populations with the strongest collective behaviour
(0�125 ≤ a ≤ 0�5) are clearly distinguishable from those with
low levels of collective behaviour (8 ≤ a ≤ 32) based only on
values of �w(Fig. 3a,b). In populations with intermediate levels
of collective behaviour, where the influence of the environmen-
tal gradient on individual velocities is at least as strong as that
of social interactions, but not overwhelming (1 ≤ a ≤ 4), �wattains intermediate values (Fig. 3a). In some of these interme-
diate cases, the value of �w varies systematically over time, due
to long transient patterns caused by the aggregation of the
population in the initial conditions (Fig. 3c). In particular,
when the influence of collective behaviour is weak, such as
when the environmental gradient is twice as strong as the influ-
ence of collective behaviour (a = 2), we found that long tran-
sient patterns caused by the aggregation of the population in
the initial conditions sometimes inflated the value of �w0 relative
to its value at other levels of a.We measured the statistical power of this test as follows.
First, for each replicate simulation at each level of a, we com-
puted the average value of �w over all times.Next, we calculated�w0 in each of M = 100 randomizations of the sampling times
for each individual. These were also averaged over all times,
yieldingM comparison average values of �w0 for each value of
0·125 0·25 0·5 1 2 4 8 16 32Gradient response,
Adj
uste
d or
der,
(t) o
r 0(t)
0·0
0·5
1·0
Time (min)
Adj
uste
d or
der,
(t)
0 60 120 180 240
0·0
0·5
1·0
Time (min)0 60 120 180 240
(a)
(b) (c)
Fig. 3. Detecting collective behaviour in eco-
logical data. (a) Adjusted order (�w) in the spa-
tial distribution of simulated populations with
different levels of collective behaviour. Filled
boxes enclose the interquartile ranges for the
distributions of �w across all sampling times
and replicates. Lines extend from the 5th to
95th percentiles of the distributions. Hollow
boxes show the analogous distribution for the
null parameter �w0. (b) Adjusted order over
time for populations strongly influenced by
collective behaviour (a from 0�125 to 0�5; tri-angles) and weakly influenced by collective
behaviour (a from 8 to 32; circles), averaged
over replicates. Colours correspond to those
in (a). (c) Average adjusted order over time for
populations with intermediate levels of collec-
tive behaviour (a = 1, dotted line and crosses;
a = 2, solid line and squares; a = 4, solid line
and diamonds).
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
36 B. D. Dalziel et al.

the average �w calculated in the first step. For each replicate
simulation at a given level of a, we then compared the average
value of �w to the 95th percentile of the comparison average val-
ues of �w0, recording for each level of a the frequency with
which the average value of �w exceeded the 95th percentile of
the distribution of average �w0s over replicates. For all levels of
a except one (a = 32; i.e. the response to the environmental
gradient is 32 times stronger than collective behaviour), this
frequency was 1�0, indicating our test is very sensitive. Even
with almost no collective behaviour (a = 32), the frequency
with which �w exceeded the 95th percentile of the null distribu-
tion was 0�8. Thus, individuals must be moving almost per-
fectly independently for our test to fail detect the consequences
of collective behaviour.
Although individual movements may be not be perfectly
independent, the presence of biologically significant levels of
collective behaviour is a separate question. As is always the
case when assessing the biological significance of a statistical
test, appropriate criteria for biologically significant levels of
collective behaviour will depend on the system in question.We
suggest as a starting point that appropriate criteriamay be if (i)�w is high, and (ii) the interquartile ranges of �w and �w0 do not
overlap. These criteria are uniquely associated with strong col-
lective behaviour in the simulated data (Fig. 3a). Correspond-
ingly, we use these criteria in the analysis of the caribou
migration patterns, described below.
We tested the robustness of our method to unobserved indi-
viduals by repeating the analysis on randomly selected subsam-
ples of the simulation data (Fig. 4). Downsampling causes a
modest decrease in the specificity of our test for collective beha-
viour (decreasing the probability that independent populations
are correctly identified) but does not significantly affect the sen-
sitivity of the test (the rate at which populations with collective
behaviour are correctly identified). More specifically, sparsely
sampled populations of nearly independent individuals
(a = 32) show higher adjusted order as a result of sampling
effects as sample size becomes small, increasing the chance of
being falsely identified as strongly influenced by collective
behaviour. However, the decrease in the specificity due to
unobserved individuals is modest. For instance, in populations
of nearly independent individuals, mean adjust order remains
below 0�5 even if only a few individuals are observed on aver-
age per time point. By contrast, in populations exhibiting col-
lective behaviour, adjusted order remains higher than for
populations of independent individuals, even if only a few indi-
viduals in the population are observed.
Figure 5 shows the application of our approach to detecting
collective decision-making in a temporally shifting environ-
mental gradient, when two experimental runs are available –one to estimate the behavioural response to the environmental
gradient and one to test for the strength of collective beha-
viour. The velocities of individuals closely track the gradient as
it shifts direction over time (Fig. 5a). As a result, the average
velocity of the population over time can be used to reconstruct
the gradient. Then, in a second experiment we can test for
group-level deviations from expected velocity over time
(Fig. 5b), which can reliably distinguish between populations
influenced by collective behaviour and populations of indepen-
dent gradient followers.
THE DYNAMICS OF COLLECTIVE BEHAVIOUR IN
MIGRATORY CARIBOU
We validated the statistical model for the velocities of indepen-
dent caribou, v0ðx; tÞ, by releasing virtual non-interacting par-ticles into the velocity field given by v0ðx; tÞ, numerically
integrating their positions forward in time, and observing the
population’s redistribution patterns over the same range of
time covered by the caribou data. Particle positions were
updated daily in the simulations, which were run forward for
three years from initial conditions, allowing ample opportunity
for errors in predicted position to accumulate. The indepen-
dent particles nonetheless precisely reproduce the broad-scale
relocation patterns of the herd (Fig. 6). This means that
v0ðx; tÞ for the caribou is a reasonable model for the advec-
tion–diffusion component of caribou migration, not a ‘straw
man’: the model was fitted to velocity data, and in the simula-
tions, there is ample opportunity for errors to accumulate as
position is integrated forward in time.
We found strong evidence of collective behaviour in the
adjusted velocities of nearby caribou, once the expected effects
of environmental and/or physiological gradient had been sub-
tracted (Fig. 7). During the spring and fall migrations, and
shortly after calving, the distribution of the adjusted order
parameter �w in the caribou data was significantly higher than
the null statistic �w0, measured by examining the degree of over-
lap in the interquartile ranges. During these times of year, the
degree of alignment of in adjusted velocities of nearby caribou
is thus consistent with strong collective behaviour. Intrigu-
ingly, the dynamics of collective behaviour vary seasonally in
the caribou in a systematic way. Oneway of looking at it is that
Proportion remaining, pMea
n ad
just
ed o
rder
und
er d
owns
ampl
ing
0·0
0·5
1·0
100 10–1 10–2
256 26 3Number remaining
= 0·5
= 32
Fig. 4. Behaviour of the adjusted order parameter when some indi-
viduals are unobserved. Lines show the average value of �w across
replicates for populations showing collective behaviour (a = 0�5;warm colours) and populations of nearly independent gradient fol-
lowers (a = 32; cool colours), when a proportion of the individuals
are randomly removed from the analysis. Each of the 10 lines of a
given colour and style corresponds to a repetition of the analysis on
a different replicate simulation. Each line is composed of 30 points,
which are each derived from a different random sample of the
original simulation output.
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 37

at some times of year (for example, during migration, or fol-
lowing calving) if you ‘zoom in’ on nearby caribou, transition-
ing from the broader bandwidths associated with advection–diffusion the narrower interaction neighbourhoods associated
with collective behaviour, nearby caribou, are much more
ordered than expected for independent particles. Yet at other
times of year (for example, in February, when the herd tends to
be more sedentary), the level of order in their velocities does
not change much when zooming in on nearby individuals, sug-
gesting more independence in the trajectories of nearby indi-
viduals.
Discussion
Collective decisions emerge by the propagation of local beha-
vioural interactions to broader scales, influencing the spatial
and temporal dynamics of populations. As such, the approach
we propose for detecting collective behaviour in ecological
data – using broad-scale collective deviations from the mean
gradient direction that would be unlikely for independent indi-
viduals – rests on a fundamental property of collective beha-
viour (Vicsek et al. 1995; Couzin et al. 2002). Our
contribution is to identify specific quantitative features of this
process that are observable in ecological data, where only a
fraction of individuals are observed and the time between
observations is much longer than the time-scale of individual
behavioural decisions. Without recourse to fine-scale observa-
tions of individual behaviour, the approach we describe can,
under some conditions, reject the null hypothesis that the data
were generated by independent responses to a common envi-
ronment (such as a chemical gradient), or to physiological
stimuli operating independently among individuals (such as
physiological responses to photoperiod).
Ultimately, research on the causes and consequences of
collective behaviour requires identifying the underlying
mechanisms that drive its emergence, maintenance and
dynamics. However, discovering the ecology of collective
behaviour in nature also requires methods for learning about
its prevalence in populations that are not exhaustively sam-
pled at the resolution of individual behaviour. As in the
study of ecological competition, or evolutionary adaptation,
pattern-oriented ‘top-down’ approaches to studying collec-
tive behaviour can complement ‘bottom-up’ mechanistic
approaches, and the most exciting discoveries often involve a
combination of both (Sumpter, Mann & Perna 2012). To
complement high-throughput ethological approaches in labo-
ratory and wild populations, our approach has the power to
screen for collective behaviour where fine-scale behavioural
data have not yet been collected, with the potential to diver-
sify and enlarge the set of populations where collective beha-
viour is considered.
The migratory caribou we study display large-scale seasonal
variation in the level of order in their velocities that cannot be
parsimoniously explained by independent responses to season-
ally fluctuating physiological cues or a seasonally and spatially
fluctuating environment. Particularly during migration, cari-
bou velocities are significantly influenced by the velocities of
nearby individuals, in addition to the physiological/environ-
mentally driven advection field they are each exposed to. Col-
lective behaviour may therefore play an important and
dynamic role in animal migration patterns –more so than has
been previously shown.
–0·0
40·
000·
04
Time (min)
Adj
uste
d ve
loci
ty, v
(t)
10 30 50 70 90 110 140 170 200 230
0·0
0·4
0·8
Adj
uste
d or
der
0
0·0
0·2
0·4
0·6
0·8
1·0
Adj
uste
d or
der
050 100 150 200Time (min)
Dire
ctio
n2
02(a)
(c)
(b)
Fig. 5. Detecting collective decision-making
in a temporally shifting environmental gradi-
ent. (a) Direction of travel over time for a pop-
ulation with a = 0�5. Vertical lines encompass
the range of directions of travel for individuals
observed at a particular time. The thick grey
curves shows the true direction of the gradient.
The red line shows a cubic spline fit to the
velocity data. (b) Adjusted order and null
order over time in a second replicate realiza-
tion of the process, where velocities were
adjusted by subtracting the spline fit to the
velocity data in the first replicate (as shown in
a). The inset in (b) shows the analogous results
for a population of nearly independent gradi-
ent followers (a = 32). (c) shows the distribu-
tion of the horizontal component of the
adjusted velocities in the second experiment,
showing collective deviations from the true
gradient direction as estimated from the data
of the first experiment.
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
38 B. D. Dalziel et al.

N
S
EW
1 km h–1
Day of year
Nor
thin
g (k
m)
0 100 200 300
060
012
00
Day of year
Eas
ting
(km
)
0 100 200 300
060
012
00
(a)
(b) (c)
Fig. 6. Migration patterns of the Rivi�ere-aux-Feuilles caribou herd. The inset globe shows location of the study area. The two larger maps show the
locations and velocities of GPS-collared caribou observed during the spring (May) and fall (October) migrations, pooled across years from 2008 to
2011. The style of the points shows each caribou’s velocity, according to the legend on the left. The bottom panels show time series of individual loca-
tions as a function of time of year. Points are median locations; vertical lines enclose the interquartile range, based on running quantiles calculated
using a 7-day non-overlapping window. Grey polygons enclose the analogous interquartile range for simulations of independent particles released
into the velocity field v0ðx; tÞ fitted to the data.
0 100 200 300Day of year
Adj
uste
d or
der i
n ca
ribou
vel
ocity
, 0·
00·
51·
0
Springmigration Calving
Fallmigration
Fig. 7. The dynamics of collective behaviour inmigratory caribou. Systematic seasonal variation in the adjusted order of caribou velocities, �w (upper
time series, in orange) showing elevated levels of collective behaviour concurrent with the timing of migration and immediately following reproduc-
tion. The shaded area shows the interquartile range, and the central line the median, of the observed adjusted order across individual caribou
observed at a given time of year, based on running quantiles calculated using a 7-day non-overlapping window. The lower time series, in blue, shows
the same information for �w0, which is calculated on time-randomized adjusted velocities, thus breaking correlations among nearby individuals that
could have been caused by collective behaviour. High values for �w and non-overlapping interquartile ranges of �w and �w0 (indicated by the horizontal
red lines) are consistent with strong collective behaviour (see also Fig. 3a).
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 39

Fluctuations in the level of order within groups of nearby
caribou indicate that the influence of collective behaviour on
caribou relocation patterns is dynamic. These fluctuations
coincide with reproduction, suggesting that collective beha-
viour is not just important for relocation patterns but can be a
dynamic part of the life history of animal populations. We do
not know what ecological processes cause the spike in collec-
tive behaviour after calving each year – perhaps it could be
related tomovement to the summer grounds following calving,
where the herd is led to by certain experienced females.
Further applications for our approach include understand-
ing the emergence and stability of seasonal migration patterns
in other systemswheremigrationmay originate fromamixture
of environmental/physiological stimuli and collective beha-
viour. For example, the migration patterns of herring (Clupea
harengus) may depend on ocean currents and food availability
(Jorgensen et al. 2005) as well as on juveniles learning the
migration routes by following older age classes (Huse 2002). In
humans, daily movement patterns in cities show the influence
of the external (built) environment as well as the effect of social
processes, such as when a significant fraction of people com-
mute to work in a few specialized areas of the city (Bettencourt
et al. 2007; Batty 2008; Dalziel, Pourbohloul & Ellner 2013).
The caribou migrations studied here may therefore represent
the tip of the iceberg of the ecological significance of collective
behaviour in wild populations. While a ‘bottom-up’ approach
to detecting collective behaviour in these populations is often
limited by the availability of fine-scale behavioural data, the
signal of collective decision-making is, under some conditions,
detectable in coarser scale ecological data.
Data accessibility
The authors of this paper do not own the data used, and permission to
archive the data was not granted. Requests to access the data may be
directed to Caribou Ungava: http://www.caribou-ungava.ulaval.ca/en/accueil/.
References
Aplin, L.M., Farine, D.R., Mann, R.P. & Sheldon, B.C. (2014) Individual-level
personality inuences social foragingand collective behaviour inwild birds.Pro-
ceedings Biological sciences/The Royal Society, 281, 20141016.
Batty,M. (2008) The size, scale, and shape of cities. Science, 319, 769–771.Berdahl, A., Torney, C.J., Ioannou, C.C., Faria, J.J. &Couzin, I.D. (2013) Emer-
gent sensing of complex environments by mobile animal groups. Science, 339,
574–576.Bettencourt, L.M.A., Lobo, J., Helbing, D., K€uhnert, C. & West, G.B. (2007)
Growth, innovation, scaling, and the pace of life in cities. Proceedings of the
National Academy of Sciences of the United States of America, 104, 7301–7306.Bode, N.W.F., Franks, D.W., Wood, A.J., Piercy, J.J.B., Croft, D.P. & Codling,
E.A. (2012) Distinguishing Social fromNonsocial Navigation inMoving Ani-
malGroups.TheAmericanNaturalist, 179, 621–632.Boulet, M., Couturier, S., Cot�e, S.D., Otto, R.D. & Bernatchez, L. (2007) Inte-
grative use of spatial, genetic, and demographic analyses for investigating
genetic connectivity between migratory, montane, and sedentary caribou
herds.Molecular Ecology, 16, 4223–4240.Clark, C.W. & Mangel, M. (1986) The evolutionary advantages of group forag-
ing.Theoretical Population Biology, 30, 45–75.Codling, E.A., Pitchford, J.W.& Simpson, S.D. (2007)Group navigation and the
“many-wrongs principle" in models of animal movement. Ecology, 88, 1864–1870.
Couturier, S., Otto, R.D., Cot�e, S.D., Luther, G. & Mahoney, S.P. (2010) Body
size variations in caribou ecotypes and relationships with demography. Journal
ofWildlifeManagement, 74, 395–404.
Couzin, I.D., Krause, J., James, R., Ruxton, G.D. & Franks, N.R. (2002) Collec-
tive memory and spatial sorting in animal groups. Journal of Theoretical Biol-
ogy, 218, 1–11.Couzin, I.D., Krause, J., Franks, N.R. & Levin, S.A. (2005) Effective leadership
anddecisionmaking in animal groups on themove.Nature, 433, 513–516.Couzin, I., Ioannou, C.C., Demirel, G., Gross, T., Torney, C.J., Hartnett, A.,
Conradt, L., Levin, S. & Leonard, N. (2011) Uninformed individuals promote
democratic consensus in animal groups.Science, 334, 1578–1580.Dalziel, B.D., Pourbohloul, B. & Ellner, S. (2013) Human mobility patterns pre-
dict divergent epidemic dynamics among cities. Proceedings of the Royal Soci-
ety B: Biological Sciences, 280, 20130763–20130763.Delgado, M.M., Delgado, M.d.M., Penteriani, V., Penteriani, V., Morales, J.M.,
Morales, J.M., Gurarie, E. & Ovaskainen, O. (2014) A statistical framework
for inferring the in-uence of conspecifics on movement behaviour.Methods in
Ecology and Evolution, 5, 1–7.Eriksson, A., Nilsson Jacobi, M., Nystrom, J. & Tunstrom, K. (2010) Determin-
ing interaction rules in animal swarms.Behavioral Ecology, 21, 1106–1111.Farine, D.R., Aplin, L.M., Garroway, C.J., Mann, R.P. & Sheldon, B.C. (2014)
Collective decisionmaking and social interaction rules inmixed-species ocks of
songbirds.Animal Behaviour, 95, 173–182.Franks, N.R., Pratt, S.C., Mallon, E.B., Britton, N.F. & Sumpter, D.J.T. (2002)
Information flow, opinion polling and collective intelligence in house-hunting
social insects. Philosophical Transactions of the Royal Society B: Biological
Sciences, 357, 1567–1583.Gautrais, J., Ginelli, F., Fournier, R., Blanco, S., Soria, M., Chat�e, H. & Ther-
aulaz, G. (2012) Deciphering interactions in moving animal groups. PLoS
Computational Biology, 8, e1002678.
Gr€unbaum, D. (1998) Schooling as a strategy for taxis in a noisy environment.
Evolutionary Ecology, 12, 503–522.Handegard, N.O., Boswell, K.M., Ioannou, C.C., Leblanc, S.P., Tjøstheim, D.B.
& Couzin, I.D. (2012) The dynamics of coordinated group hunting and collec-
tive information transfer among schooling prey. Current biology, 22, 1213–1217.
Hastie, T., Tibshirani, R. &Friedman, J. (2008)TheElements of Statistical Learn-
ing: DataMining, Inference, and Prediction, 2nd edn. Springer, Stanford, CA.
Huse, G. (2002) Modelling changes in migration pattern of herring: collective
behaviour and numerical domination. Journal of Fish Biology, 60, 571–582.Ioannou, C.C., Guttal, V. & Couzin, I. (2012) Predatory fish select for coordi-
nated collectivemotion in virtual prey.Science, 337, 1212–1215.Jorgensen, H.B.H., Hansen,M.M., Bekkevold, D., Ruzzante, D.E. &Loeschcke,
V. (2005) Marine landscapes and population genetic structure of herring (Clu-
pea harengusL.) in the Baltic Sea.Molecular Ecology, 14, 3219–3234.Langrock, R., Hopcraft, J.G.C., Blackwell, P.G., Goodall, V., King, R., Niu,M.,
Patterson, T.A., Pedersen, M.W., Skarin, A. & Schick, R.S. (2014) Modelling
group dynamic animal movement. Methods in Ecology and Evolution, 5, 190–199.
Le Henaff, D. (1976) Inventaire a�erien des terrains de v�elage du caribou dans la
r�eegion nord et au nord du territoire de lamunicipalit�e de la Baie James (mai-juin
1975).Ministere du tourisme, de la chasse et de la peche, Quebec City, QC.
Levin, S. (1992) The problem of pattern and scale in ecology: the Robert H.
MacArthur award lecture.Ecology, 73, 1943–1967.Machta, B.B., Chachra, R., Transtrum, M.K. & Sethna, J.P. (2013) Parameter
space compression underlies emergent theories and predictive models. Science,
342, 604–607.Mann, R.P. (2011) Bayesian inference for identifying interaction rules in moving
animal groups.PLoSONE, 6, e22827.
Mitbavkar, S. &Anil, A.C. (2004) Vertical migratory rhythms of benthic diatoms
in a tropical intertidal sand flat: inuence of irradiance and tides. Marine biol-
ogy, 145, 9–20.Nagy,M., Akos, Z., Biro, D. &Vicsek, T. (2010) Hierarchical group dynamics in
pigeon flocks.Nature, 464, 890–893.Nagy, M., V�as�arhelyi, G., Pettit, B., Roberts-Mariani, I., Vicsek, T. & Biro, D.
(2013) Context-dependent hierarchies in pigeons. Proceedings of the National
Academy of Sciences of theUnited States of America, 110, 13049–13054.�Okubo, A. & Levin, S. (2001) Diffusion and Ecological Problems: Modern Per-
spectives. Springer, NewYork.
Olson, R.S., Hintze, A., Dyer, F.C., Knoester, D.B. &Adami, C. (2013) Predator
confusion is sufficient to evolve swarming behaviour. Journal of The Royal
Society Interface, 10, 20130305–20130305.Ovaskainen, O. & Cornell, S.J. (2006) Space and stochasticity in population
dynamics.Proceedings of theNational Academy of Sciences of the United States
of America, 103, 12781–12786.Pascual, M., Roy, M. & Laneri, K. (2011) Simple models for complex systems:
exploiting the relationship between local and global densities.Theoretical Ecol-
ogy, 4, 211–222.
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
40 B. D. Dalziel et al.

Patlak, C.S. (1953) Random walk with persistence and external bias. Bulletin of
Mathematical Biology, 15, 311–338.Perony, N., Tessone, C.J., K€onig, B. & Schweitzer, F. (2012) How random is
social behaviour? Disentangling social complexity through the study of a wild
housemouse population.PLoSComputational Biology, 8, e1002786.
Post, E. & Forchhammer, M.C. (2008) Climate change reduces reproductive suc-
cess of an Arctic herbivore through trophic mismatch. Philosophical Transac-
tions of the Royal Society B: Biological Sciences, 363, 2369–2375.Potts, J.R.,Mokross, K. & Lewis,M.A. (2014) A unifying framework for quanti-
fying the nature of animal interactions. Journal of The Royal Society Interface,
11, 20140333–20140333.Saigusa, T., Tero, A., Nakagaki, T. & Kuramoto, Y. (2008) Amoebae anticipate
periodic events.Physical ReviewLetters, 100, 018101.
Simons, A.M. (2004)Manywrongs: the advantage of group navigation.Trends in
Ecology&Evolution, 19, 453–455.Skellam, J.G. (1951) Random dispersal in theoretical populations. Biometrika,
38, 196–218.
Sumpter, D.J.T., Mann, R.P. & Perna, A. (2012) The modelling cycle for collec-
tive animal behaviour. Interface Focus, 2, 764–773.Taillon, J., Festa-Bianchet, M. &Cot�e, S.D. (2012) Shifting targets in the tundra:
protection of migratory caribou calving grounds must account for spatial
changes over time.Biological Conservation, 147, 163–173.Torney, C., Neufeld, Z. & Couzin, I.D. (2009) Context-dependent interaction
leads to emergent search behavior in social aggregates. Proceedings of the
National Academy of Sciences of the United States of America, 106, 22055–22060.
Vicsek, T. (2001) A question of scale.Nature, 411, 421.
Vicsek, T. &Zafeiris, A. (2012) Collectivemotion.Physics Reports, 517, 71–140.Vicsek, T., Czir�ok, A., Ben-Jacob, E., Cohen, I. & Shochet, O. (1995) Novel type
of phase transition in a system of self-driven particles.Physical Review Letters,
75, 1226–1229.
Received 1 April 2015; accepted 9 June 2015
Handling Editor: JasonMatthiopoulos
© 2015 The Authors. Methods in Ecology and Evolution © 2015 British Ecological Society, Methods in Ecology and Evolution, 7, 30–41
Testing for collective behaviour 41