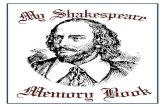
![RoboEarth - Eindhoven University of Technology · RoboEarth collects, stores, and shares data independent of specific robot hardware. In addition, data in RoboEarth is linked [42].](https://static.fdocuments.us/doc/165x107/5ff0fe751446f02b0a79f989/roboearth-eindhoven-university-of-technology-roboearth-collects-stores-and-shares.jpg)
Design of Intelligent Robotics · RoboEarth •How to deal with a complex world? • Changing...
39
Design of Intelligent Robotics René van de Molengraft December, 6 th , 2010
Transcript of Design of Intelligent Robotics · RoboEarth •How to deal with a complex world? • Changing...

Design of Intelligent Robotics
René van de Molengraft
December, 6th, 2010

Theme
/ faculteit werktuigbouwkunde PAGE 211-12-2009
• Health: Care and Cure

Mission
/ faculteit werktuigbouwkunde PAGE 311-12-2009
• Help elderly people to stay in their homes• Improve quality of surgery for surgeon and patient

Research challenges
/ faculteit werktuigbouwkunde PAGE 411-12-2009
Learning• Low-level:
3D-sensing, world modeling, grasping, locomotion• High-level:
cognition, planning, coordination of multiple robots
Approach• Mixed Model/Data-based• Use priors

Robocup@Home
/ faculteit werktuigbouwkunde PAGE 511-12-2009

RoboCup use cases
/ faculteit werktuigbouwkunde PAGE 611-12-2009
Midsize league soccer• Scenario: structured, but highly dynamic• Low-level: world modeling, skills• High-level: strategy, coordination
@Home league• Scenario: static, but highly unstructured• Low-level: 3D-sensing, object recognition, grasping• High-level: cognition, learning

RoboEarth Project
• Four-year funding from European Commission (FP7)
• Starting date: December 1st, 2009
• Consortium consisting of:
PAGE 712-03-2010

Motion Control
• Performance• 90% feedforward
• 10% feedback
PAGE 812-03-2010
• Humans in day2day tasks• 90% feedforward – learning and memorization
• 10% feedback – sensory feedback

Industrial robots
PAGE 912-03-2010
• Structured environment• Same scene, same task• No humans

Domestic and care robots
PAGE 1012-03-2010
• How to deal with a complex world?• Changing scenes• Many possible scenarios

RoboEarth
• How to deal with a complex world?• Changing scenes
• Many possible scenarios
PAGE 1112-03-2010
• RoboEarth – learning and memorization
• Share any reusable knowledge between robots
• World-Wide-Web for and by robots

RoboEarth
PAGE 1212-03-2010

Safety and risks
PAGE 1312-03-2010
• Consistency of data in RoboEarth
• Who is allowed to sharing what?
• Use existing protocols (HTTPS)
• Protect “personal” data (compare Streetview)
• Certified users
• Log and analyse usage
• Liability in case of malfunction?
• Autonomous operation
• Who is responsible?

/ faculteit werktuigbouwkunde
• “By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team”
• Joint development of technology in robotics and artificial intelligence
• Since 1997
Robocup

/ faculteit werktuigbouwkunde
• Founded spring 2005
• 20 active members
• 2nd place World Cup 2008/2009/2010
Tech United

/ faculteit werktuigbouwkunde
• fully autonomous
• vision and localisation
• fast and safe
• ball-handling (don’t clamp!)
• ball-kick
• team-play
Challenges

/ faculteit werktuigbouwkunde
• design a team of autonomous soccer robots
• robot is of DH/CS type
• team is of DH/DS type
• soccer = strategy + skills
Design goal

/ faculteit werktuigbouwkunde
• robustness
• performance
• time-to-next-tournament
• safety
• maintenance
•
• cost
Design criteria

/ faculteit werktuigbouwkunde
• FIFA rules
• additional Robocup rules
• size, weight, color
Constraints

/ faculteit werktuigbouwkunde
• manage complexity
• keep it simple
• hierarchy
• make choices explicit
• use models
• create robustness
• redundancy
Design rules of thumb

/ faculteit werktuigbouwkunde
team
robot robot robot
Bottom-up design

/ faculteit werktuigbouwkunde
• localisation
• soccer skills
• intercept, dribble, kick
• soccer roles
• attacker, defender, goalkeeper
• soccer tactics
• pass, assist, play system
Requirements

/ faculteit werktuigbouwkunde
• low level (hardware) functions
• drive
• kick
• ball handling
• sense environment
• (high) level (sofware) functions
• localisation
• skills
• roles and strategy
Identify functions

/ faculteit werktuigbouwkunde
HW
HW
HW
HW
HW/SW
HW/SW
HW/SW
HW/SW
SW SW
SW
SW
HW HW HW
HW/SW HW/SW HW/SW
SW SW
SW
SW
HW/SW
HW
System architecture

/ faculteit werktuigbouwkunde
• which sensors?
• vision
• odometry
• accelerometers
• laser
• hardware or software?
• cpu power
• sensor fusion
Design space exploration

/ faculteit werktuigbouwkunde
• vision
• number of cameras, type of camera, resolution, omnivision, mirror, construction, acquisition, feature extraction, modelfit, object tracking etc.
Localization

/ faculteit werktuigbouwkunde
• Interdisciplinary
• mechanics
• electronics
• software
• Approach
• model-based design (simulation and prototyping )
• early integration
Specialists needed

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde
• hardware
• omnivision camera+mirror
• electronic compass
• odometry with motor encoders
• software
• white-line detection
• orientation calibration
• sensor fusion
Our localization design

/ faculteit werktuigbouwkunde
White-line detection

Evolution and revolution
/ faculteit werktuigbouwkunde PAGE 3211-12-2009
Devbot0 2005
Model 2006
Model 2007
Model 2008
Model 2009

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde

/ faculteit werktuigbouwkunde
?
How to design a system of systems?

/ faculteit werktuigbouwkunde
• 5 agents: distributed system
• agents must be self-reliant
• minimise interaction/sync
• maximise cooperation
• aggressive environment
System of systems

/ faculteit werktuigbouwkunde
• April 2011, German Open, Magdeburg
• July 2011, World Cup, Istanbul
• Dedicated goal keeper
• Robustified ball handling
• Passing during gameplay
Towards Istanbul, 2011