Design and Fabrication of a Lightweight Robotic...
153
Design and Fabrication of a Lightweight Robotic Manipulator Matthew MacGregor Roy Department of Mechanical Engineering McGill University A Thesis Submitted to the Faculty of Graduate Studies and Research in Partial Fulfillment of the Requirements of the Degree of Master of Engineering O Matthew M. Roy 1997
Transcript of Design and Fabrication of a Lightweight Robotic...

Design and Fabrication of a Lightweight Robotic Manipulator
Matthew MacGregor Roy Department of Mechanical Engineering
McGill University
A Thesis Submitted to the Faculty of Graduate Studies and Research in Partial Fulfillment of the Requirements of the
Degree of Master of Engineering
O Matthew M. Roy 1997

National Library I * m of Canada Bibliothèque nationale du Canada
Acquisitions and Acquisitions et Bibliographie Services services bibliographiques
395 Wellington Street 395, rue Wellington Ottawa ON K I A ON4 Ottawa ON K1A ON4 Canada Camda
Yow file Votre relérenu,
Our II& Notre retdrence
The author has granted a non- L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or sell reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thése sous paper or electronic formats. la fome de microfiche/fjlrn, de
reproduction sur papier ou sur format électronique.
The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts fiom it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation.

Abstract
TypicaIly, when a robotic rnanipulator undergoes rapid acceleration, there is a
cornmensurate loss in end-effector positional accuracy. To achieve hi& accuracy of the
working end, massive links are usually required. Conversely, to achieve high
accekations, thin and fi- links have to be employed, only to be plagued by large end-
effector vibrations and long settling times. However, this traditionai tradeoff'can be
circumvented through the application of hi&-performance materiais such as
graphitdepoxy which exhibits high mess-to-weight and strength-to-weight ratios as
well as good damping properties. This thesis describes the process of designing and
fabricating the three principal mechanisns of an antbropomorphic Lightweight robotic ami:
the shoulder joint, elbow joint and wrist. Each mechanism comprises various cornponents
which were uidividudy optimized for strength, stifhess and weight by finite-element
aaalysis. The components were then synthesized into shoulder, elbow and wrist
a mechiini(;m thai exhibited excellent workspace, low backlash and low fiction. This
lightweight composite manipulator was developed as a multi-purpose a m for possible
applications in the remote repair of hydroelectrk power lines, mhesweeping and the
handling of hazardous materials.

Résumé
Normalement, lorsqu'un bras robotique accélère rapidement, il perd en
conséquence de la précision. Pour atteindre un bon niveau de précision, la structure du
bras doit être massive. A l'inverse, pour atteindre de hautes accélérations, la structure
doit être mince et donc flexible. Néanmoins, en utilisant des matériaux composites,
comme les fibres de carbone, ayant des excellentes qualités au niveau de force et rigidité, il
est possible de concevoir et fabriquer un bras robotique très Iéger et pe~ormant. Cette
thèse décrit le processus de concevoir et fabriquer les trois mécanismes principaux d'un
bras robotique, c'est à dire l'épaule, le coude et le poignet, ayant les dimensions, la
mobilité, et la performance approximatives d'un bras humain. Chaque mécanisme
comprend plusieurs pièces qui ont été optimalisés pour la force, rigidité et poids par
l'analyse d'éléments finis. Ce bras robotique a été conçu comme un bras polyvalent
powant servir à plusieurs fins, notamment L'entretien des lignes hydroélectriques, la
a chasse des mines ainsi que la manipulation des objets toxiques ou dangereux.

Table of Contents
Chapter 1 Introduction L 1 Ddbitioons: What is a robot? 1.2 Classmg Robotic Arms 1.3 Problems Associatd with Current Robotic Arms 1.4 Objectives 1.5 Potential Lightarm Applications Chapter 2 2.1 S w e y of Current Robotic Axms 2.2 Anatomy of an Anthropomorphic A m 2.3 Survey of Composite Robot Research 2.4 Survey of Materials Chapter 3 3.1 Kinematics of Lightann 3.2 Redesign of the Shoulder Mechanism 3.3 Design of Universal Joint 3 -4 Stress Analysis of Centercube Chapter 4 4.1 Design ofthe Ebow Mecfianism 4.2 Force Analysis 4.3 Design of Composite Box-Beam 4.4 Eïte Element Analysis 4.5 Modification of Box-Beam to Improve Elbow Joint KUiematics 4.6 Theoretical Deflection of Box-Beam 4.7 Theoretical Stress Anafysis 4.8 Box-Beam Cornparison 4.9 Fabrication of GraphitdEpoxy Box-Beam 4.10 Box-Beam Strength Test 4.1 1 Stainless Steel End-Fitting 4.12 Stress Analysis of Adhesive Bond 4.13 Stress Analysis of MO Screws 4.14 Design ofMain Shafts 4.1 5 B earing Selection 4.16 Synthesis of Elbow Cam Mechanism Chapter 5 5.1 Design of Foream 5.2 Design of Wrist 5.3 Selection of Gripper or Hand Chapter 6 6.1 Final Assembly

6.2 Evaluation of Mass and inertia 6.3 Summary of Stress Analysis 6.4 Recommendations for Future Work 6.5 Conclusion References Appendices

List of Figures
Chapter 2 Figure 2.1 : ROTEX Figure 2.2: Canadm Figure 2.3: Titan II Telerobotic Manipuiator System Figure 2.4: Mtsubishi Paùit Coating Robot Figure 2.5 : MTS 200A Figure 2.6: ASEA IRB 6/2 Figure 2.7: Advauced Automation Products BASE Robot Figure 2.8: Sarcos Dextrous Arm Figure 2.9: Spine Robot Figure 2. IO: Barrett Wrist, Bmett Hand & Barrett Arm Figure 2.1 1 : Omni-Hand & Onini-Wrist Figure 2.12: Anatomy of an Anthropomorphic Arm Chapter 3 Figure 3.1 : Shoulder Joint Nomenclature Figure 3.2: Redesigned Shouicier Joint Figure 3.3 : Kinematic Parameters of the Shoulder Figure 3 -4: Stress Contours of H-Base Figure 3.5 : Univerd Joint Figure 3 -6: Plan View of Centercube Figure 3 -7: Stress Contours of Centercube Figure 3 -8: Range of Motion of Shoulder Joint Chapter 4 Figure 4.1 : Vector Force Analysis for Strong Direction Figure 4.2: Vector Force Analysis for Weak Direction Figure 4.3 : Key Dimensions of Shoulder Figure 4.4: Vector Moment Analysis Figure 4.5: Forces Acting on Elbow Box-Beam Figure 4.6: X-Stress Contours in Top O0 Ply of Caotilevered
Box-Beam without Holes Figure 4.7: X-Stress Contours in Top 0' Ply of Cantilevered
Box-Be. with Holes Figure 4.8: Close-up of X-Stress Contours in Top O0 Ply arouad Hole Figure 4.9: Close-up of Y-Stress Contours in Top O0 Ply amund Hole Figure 4.10: Close-up of XY-Stress Contours in Top O0 Ply around Hole Figure 4-11 : X-Stress Contours in 45" Ply Figure 4.12: Y-Stress Contours in 45' Ply Figure 4.13 : XY-Stress Contours in 45' Ply Figure 4.14: Dimensions of Slot Figure 4.1 5: X-Stress Contours in Box-Beam with SIot (O0 Ply) Figure 4.16: Y-Stress Contours in Box-Beam with Slot (4S0 Ply)

Figure 4.17: Dimensions of Box-Beam Figure 4.18: Ply Distance fkom Neutra1 Ans Figure 4.19: Laadhg of Holes by Actuators Figure 4.20: Dimensions of a Pin-Loaded Laminate Figure 4.21: Three Nodes with Highest Loads Figure 4.22: Vacuum-Bagging Technique Figure 4.23: Cure Cycle for LTM25 Figure 4.24: Removing the Cured GraphitdEpoxy Box fkom the Mold Figure 4.25: MTS Tension Test Set-up Figure 4.26: Graph of Tende Load vs. Displacement Figure 4.27: Dimension of End-fitring Chamfier Figure 4.28: Stress Contours in Adhesive Bond Figure 4.29: Staidess Steel End-Fitting and Cutaway of Box-Beam Figure 4.30: Cantilevered Loading of MO Screws Figure 4.3 1 : Dimensions of Main Shaft Figure 4.3 2: Beam Analysis Figure 4.3 3 : Sumxnation of Bending Moment Diagrams Figure 4.34: Shear Stress Diagram Figure 4.3 5 : Centroid of Hoiîow HaKCylinder Figure 4.36: Anatomy of Eibow Cam Mechanism Figure 4.3 7: EIbow Components Figure 4.3 8 : Components of Bottom Shaft Assembly Figure 4.39: Assemblai Elbow Mechanism Chapter 5 Figure 5. I : F o r e . Figure 5.2: Stress Contours on Forearm (Transverse Loading) Figure 5.3: Stress Contours on Forearm (Vertical Loadkig) Figure 5.4: Load Analysis for Forearm's M3 Screws Figure 5.5: Determination of Local Yïeldhg around Hole Region Figure 5.6: Stress Contours around Hole Region Figure 5.7: Components of Wnst/Foreann Figure 5.8 : Wrist & Forearm Assembly Chapter 6 Figure 6.1 : Front & Side Views of Lightann Figure 6.2: Additional Views of Lightann Figure 6.3 : Main Links for Calculating Inertia

List of Tables
Chapter 2 Table 2.1: Mechanical Properties of Some I-Iigh-Perfomiaoce Materiais Chapter 3 Table 3.1 : FEA Iterations for Wall Thickness of Bearing Mounts Chapter 4 Table 4.1 : Mechanical Properties of LTM25 GraphiteEpoxy Table 4.2: Factors of Safety for [02/45/-45]s without steel end-fitting Table 4.3: Factors of Safety for [01/45/-451s with steel end-fitting Table 4.4: Factors of Safety for [0,/90Is with steel end-fitting Table 4.5: Factors of Safety for [(S O)& with steel end-fitting Table 4.6: Factors of Safety for [(H 5)& with steel end-fitting Table 4.7: Factors of Safety for [k15/+45]s with steel end-fitting Table 4.8: Factors of sa fief^ for [OJ30/-30Js with steel end-fit.g Table 4.9: Factors of Safety for [O2/45/-45Is with steel end-fitting
plus 4 woven patches over hole regions Table 4.1 0: Cornparison of Bending and Bearing Stresses Table 4.11: Factors of Safety for [02/45/-45ls with steel end-ftting
plus 4 woven patches over hole regions and dot Table 4.12: S t u n m q of Box-Bearn Deflection Solutions Table 4.13: Ply Strains Table 4.14: Cornparison of Box-Beams: GraphiteEpoxy, Alumùium & Steel Table 4.1 5: Survey of Epolry Adhesives Table 4.16: B e a ~ g Data Table 4.17: Breakdown of Bearing Masses Chapter 6 Tabl e 6.1 : Mass Summary Table 6.2: Material & S a f i Factor Summary of Key Lightarm Components

List of Symbols
laminate modulus matrix laminate cornpliance mtnX shear factor flexural rigidity diameter isotropic Young's moduius Young's rnodulus in fiber direction Young's moduius in ma& direction Young's modulus in shear actuator force shear rnodulus Iaminate tfiickness moment of inertia shear correction ficior longitudiaal (x-direction) beam mature induced transverse @&ection) beam curvature induced transverse (z-direction) beam curvature length of beam mass applied shear Ioad fkst moment of area radius shear strength thickness total &tic deflection of box-beam tende strength in fiber direction compressive strength in fiber direction total static defldon of shaR tensile strength in mat& direction compressive strength in mat& direction strain ply orientation angle density bending stress bearing stress tende stress shear-out stress shear stress

There are numerous people to whom 1 owe a great deal of gratitude and without whose constant help, guidance and stewardship this endeavour never would have corne to hition. Primarilys 1 would like to single out two individualsy Professon Lany Lessard and Vincent Hayward, who were endlesdy patient and kind and who found t h e for me even when they had none. I also owe a considerable debt of gratitude to Dr. Ian Sinclair of MPB Technologies of Pointe Claire for his forbearance and for making this- collaboration possible in the first place. An engineer's conceptions are often limited by the talents of his machinists, but this was hardiy tnie in my case. The bu& of the macbining was done at the Physics Department machine shop by Joel Rous and Eddie Del Campo under the diligent supe~sion of Steve Kecani while the remahder of the rnachining was done at the Machine Tool Lab by Roy Westgate, Tony Micozzi and Danen Cheuan under the aegis of Louis Hueppin. To ail seven machinists, I wouid like to express my heartfelt thanks for a job weil done. Not only was your professionalism unsurpassed but your advice, support and fellowship were very much appreciated. I would also like to thank the members of the Composites Group for their assistance and camaraderie, in partidar Diao, John and Hamid for helping with the composites, and Tareck for his humour and fneodship. Firdy, nothing would have been possible without the unwavering support of
a the two greatest parents, M d y n and Bob, to whom this work is dedicated.

Chapter 1
Introduction
One of the primary objectives of robotics engineering is to design a manipdator
capable of high link accelerations without sacdiciag positional accuracy- For industrial
robotic applications, such as automated assembly, productivity is related to the speed and
settling t h e of a robotic arm while the positional accuracy determines the q d t y control.
These two attributes, high Link acceleration and positional acniracy, were once considerd
m u W y exclusive. Precise robotic manipulators were traditionaily massive and slow
whereas f~ ones were light and fhsy , and afHicted with unwieldy end-effector
vibrations. However, the traditional tradeoff c m been circumvented by two methods. * F d y , the dynamic raponse of each Iink can be inwrporaâed into the control aigorithm
for the entire arm. This is achieved by carefdy quantifying the flexure and damping of
each link and then using a cornputer controi system to correct for the end-effector's
vibrations [1-51. The performance of robotic manipulators can dso be d r d c a l l y
improved by reducing the inertia of the tùiks while rn aintaining stBiess and strength [6-81.
This can be achieved by utilizing materials with very hi@ stifniess-to-weight and strength-
to-weight d o s , such as composite materials, and by optimizing the geometry of various
components to minimize degection and stress.
Another hdamental concem of ment robotics research has been to dwefop
anthropomorphic @uman-like) arms capable of mulating the dexterity, manipulability,
workspace volume and payload-to-weight ratio of a human ana Not only would
anthropomorphic a m be ideal prostheses, but they would also make teleoperation in
space, undersea and in hazardous environrnents that much easier for the human controuer.

The advent of high-performan~e composite maten'als, with very high stE~ess-to-
@ weight and strength-to-weight ratios as weli as excellent damping properties, have made it
possible for robotics engineers to buiid miuiipulators with excellent stifbess, strength,
damping and low inertia This thesis describes the process of designing and fabncating a
lightweighî, anhpomorphic, sevendegree-of-fkedorn manipuiator using
graphite/epoxy, duminum and stainIess steel to achieve human-like payload-to-weight
ratio, dexterity, rnanipulability, workspace volume as weii as good positional accuTLIcy
without sacacing link acceleratiom.
1 . Definitions: What is a robot? From an eîymological standpoint, the tenn ccrobot" was derived fiom the Czech
"robotnik" or "robotan, meaning slave or subse~ence , and gained prominence fiom the
science fiction play RUR (ir2ossran 's Univerml Robots) by Czechoslovakian playWnghî
Karel Cap& [9]. Nowadays, robots corne in every imaginable shape and size. This has
undoubtedly wntributed to the apparent confusion regardhg what exactly a robot is. For
instance, what distinguishes a robotic a m fkom a crane, gantry or an excavator?
Numerous robotics organhtions around the worîd have attempted to cla@ the issue by
proffering dehitions of a robot. In 1987, the Robotics Industry Association (RIA) of the
United States [10,11] defined a robot as a "reprogrammable rnultifiuictional machine
designed to manipulate materia parts, tools, or specialized devices through variable
programmed motion for the performance of a variety of tasks." The Swedish Industrial
Robot Association 1101 d&ed a robot as "an automatically wntroiled, reprogrammable,
mdti-purpose manipulative macbine with or without Iocornotion for use in industrial
automation applications."
Lest there be any confbsion, the tems "robotic am7' and ccdpu la to f ' shall be
hereafter treated as synonymous and ofien referred to h p l y as an "ami." While on the
topic of taminology, "end-effectof' shall be taken to mean the endpoint of the arm, which

could be the tip of a tool the center of rnass of a payioad or in the absence of any such
object, mereiy the geometncal center of the gripper or hand.
1.2 Classiwng Robotic Arms: There are endless ways to classiQ robotic arms: by structure, by hction, by the
numbei of degrees-of-fieedom @OF), by the type of actuation, by whether the joints are
serial or pardel et cetera. The Japanese Industrial Robot Association (JIRA) classifies
robots according to their capability [IO]:
Class 1 is a simple manual, teleoperateci rnanipuiator
Class 2 is a h e d sequence robot that can only perform a single preordained task
Class 3 is a variable sequence robot whose single task «in be eady reprogrammed to
perform a different task
Class 4 is a robot that can repiicate a sequence of steps show to it by a human
operator
Class 5 is a numericaily controiîed robot
Class 6 is an intelligent robot capable of sensing and navigating through its
environment
Outside Japan, pertiaps the most common approach [12-141 is to chas@
manipulators according to their structure. Accordingly, there are essentidy six types of
robot a m :
1. Cartesian Coordinate Arms (all prismatic joints)
2. Polar Coordinate Arms (3 revolute degrees-of-fieedom)
3. Cylindrical Coordinate Arms (2 prismatic joints and 1 revolute joint)
4. Revolute Coordinate Amis (4 or more revolute DOF)
5. Serpentine Amis (numerous joints artidated in senes like the human spine)
6. Anthropomorphic Anns (consisting of shodder, elbow and wrist joints)

a 1.3 Problems Associated with Current Robotic Arms
Most curent robotic arms possess poor payload-t O-weight ratios, poo r damping
and lack anthropon?orphic manipulability and dexterity. Futhemore, the essential dynamic
tradeoff between Illik acceferation and positional accuracy hasn't been properly addresseci.
Conventiondy, to design a kt-moving ann required that the links have low inertia.
Inevitably, this resulted in Iarge end-effector vibrations and long settling times.
Conversely, to achieve high positional accuracy required bulky, massive links. Due to the
large inertia of the links, these robotic arms cannot move rapidy and require inordinate
arnounts of power. However, robot researchers the world over have already begun to
offer many design solutions to these problems. To achieve the manipulabiiity and
dexterity of a human arm, innovative new joint mechanisms have been studied. The
a advent of hi& stifhess-to-weight composite materials has dso had a signïficant impact on
overcoming the conventional tradeoff between link acceleration and positionai accuracy.
1.4 Objectives Bearing in mind the aforementioned shortcomings, the objectives of this thesis
were to design and fabncate a Iightweight anthropomorphic robotic arm that has a
payload-to-weight ratio of 1 : 1, a msUamum static deflection of 1 cm while lifting its
maximum payload of 10 kg and, furthemore, exhibits the manipulability, dexterity and
workspace volume approaching that of a human arm. To achieve these design criteria,
each component of the shodder, elbow and wria mechanisms was optimized for
nmximum sirmgth-to-weight and stifniess-to-weight ratios.

1.5 Potential Lightarm Applications Lightarrn was designeci as a general-purpose ann with a wide variety of potential
applications ranging fiom repairing high-voltage power Lines to minesweeping [15]. Spin-
off applications may include bomb disposal and haadhg hazardous materiais, both
chernical and nuclea. [16]. In the nuclear industry, however, radiation is kuown to have a
deletenous effect not only on the robot's electronic circuitry but also on the mechanicai
properties of carbon fiber reinforcd plastics [17]. Yet another possible a p p ~ d o n for
Lightann is in medicine where surgeons have already begun to use robotic manipulators
nich as the AESOP a m for certain simple procedures [18,19]. To perform such a wide
gamut of tasks, the robotic arm must be able to emdate the speed, precision, payload,
- dextenty and workspace volume of its hurnan counterpart.

Chapter 2
2.1 Survey of Current Robotic Arms Due to the sheer nurnber of manipulators currently in existence. it would not be
feasibie to discuss and describe each one. So, in the interest of brevity, the following is a
mere sampling of some interesthg arms that have bearing on the m e n t work.
A payload-to-weight ratio of 1 : t has already been achieved with the ROTEX - manipdator, shown in Figure 2.1, designed by Gombert et ai. at the German .4erospace
Research Estabiishment [20,2 11.
r 1 Figure 2.1 : ROTEX
The Canadian Space Agency and SP-AR Aerospace used graphite/epoxy to design
the space shuttle's rernote rnanipulator system., the Canadarm, shown in Figure 2.2. For
qace applications, Iightness, high stifiess-to-weight ratio and good damping propenies
are typically the driving factors in the design. The neda generation of space robots. such

as the Space Station Remote Manipulator System (SSR41S). are usinj gaphitelepoxy to
make even lighter. stiffer and better performing ams.
Figure 2.2: C a n a d m
Schilling Robotic Systems has developed a high-performance six-degree-of-
freedom titanium a m called the Titan II. Powered by hydraulics ninning at a pressure of
3000 psi (20.7 MPa), the Titan II has an excellent I i f t capacity of 210 pounds (1 09 kg) at
its tùll extension of 76 inches (1 -9 m) and is designed to operate in radioactive. toxic-
chernical. high-voltage and undersea envkonments [22] . Schil1ing.s latest refinements are
embodied in the Titan III, shown in Figure 2.3.

Mitsubishi Heavy Industries produce the six-degree-of-fieedom Paint Coatinç
Robot. Powered by hydraulics runninç at a relatively Iow 7.4 lWa, the 450-kilogram a m
is rated for a payload of only 5 kilograms [23 J. This is a typical example of an indusrriai
robotic manipulator which is designed for simple. repetitive manufacturing tasks. In many
of these applications, the introduction of high-perfomance manipulators would not be
justified because the task the a m perfoms (e.g. spray-painting) requires neither speed nor
precision.

xes
The six-degree-of-fiedom, servo-hydraulic MTS 200A was designed as a general-
purpose industrial rnanipulator for handling tools, loading and unloading machines and
performing inspection on production lines. The M T S am is capable ofachieving a
repeatable end-point precision of M. 13 m with loads up to 100 kg (241.


The ASEA industrial Robot System iRB 6/2 is another generai-purpose six-
degree-O f-&dom industrial robot. Designed for grinciing, polishing, arc welding
debumng, and assembly. this arm has a rated payload of 6 kg and a repeatabiliq of 9 . 2
mm [ZSj.
- Figure 2.6: ASEA IRB 6/2
Advanced Automation Products produces the BASE Robot which is a Cartesian-
coordinate arm coupled with a revolute gripper. Constmcted of duminum, stainless steel
and bronze. the BASE Robots are actuated by a pneumatic pressure. At 80 psi (552 Ha).
forces generated in the x-y-z directions vary nom 55 to 90 pounds (25 to 4 1 kg) [ X I .

a Figure 2.7: Mvanced Automation Products BASE Robot

ïhe Sacos Dextrous hm, one of which can be found at the McGiU Center for
[ntelligent Machines, has ten degrees of fkedorn and operates at 3000 psi (20.7 1Wa) of
hydraulic pressure. The tele-operator of the Sarcos Dextrous k m .'wearsm the master
am and by moving his human a m inside the master arm, the motion is replicated by the
slave arm. The load cefls in the Sarcos arm can sense forces as smaU as one ounce,
permitthg the operator to engage in deiicate [27].
W h guide for humeral W h guide rotation shoulder flexfexten
I :
Figure 2.8: Sarcos Dextrous -irm
Spine Robotics of Sweden has developed a serpentine manipulator for industrial
applications ranging from spray painting to arc welding. With its electro-hydraulic servos
and seven degrees of freedom, it is a hi-@y dexuous arm [28].

a Figure 2.9: The Spine Robot spray painting the interior of a car body

Barrett Technology has developed a lightweight, highly dextrous, zero-backiash,
a sevendegree-of-fieedom manipulator. The f o u DOF of the 7-pound (3 -2 kg) duminurn
and steel shouider/elbow are powered by bmshIess DC electric motors and generate a
force at the tip of 5 Ibs (22 N). The 3-DOF wrist, constructeci of magnesium and a
carbonKevlar composite, weighs ody 4 Ibs (1 -8 kg) yet generates pitch and roll torques
of 42 in-lb (4.7 N-in). The multi-fingered Banett Hand exhibits similady impressive
dexterity, with the capability of manipulating objects as large as 1 meter in diameter or as
srnail as 1 centimeter [29].

Some fascinating innovations in anthrorobotics (the area of study concemed with
robots of human-like form and funaion) have aiso corne from Ross-Hime Desi-.
Possessing remarkabie dexrerity. the Omni-Hand and the Omni-Wrist are rugged enough
to be used in everything tiom for nuclear materiai handling to underwater manipulators.
Both are rated for a payload of 25 pounds (1 1.4 kg). The Oh-Wnst aliows for 180" of
pitch and yaw as weU as 3 60° of continuous roll which makes it ideal for rnanipulating
tools [30].
Popular exampies of revolute coordinate manipulaton are the Programmable
Universal Manipuiator for Assembly (PUMA) designed by Unimation [3 11, Cincinnati
~Milacron arrns [32], and the Selective Cornpliance Assernbly Robot Arm (SCARA), iïke
the French Scemi [33]. There are aiso numerous anthropomorpbic arms currently on the
market: the Inteiiedex 660 [34], the ABB IRB 1000, Tetrabot, and the Martin Marietta
Flight Telerobotic SeMcer (FTS) .

toss-Hime Designs. Inc.

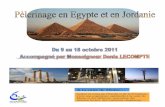
2.2 Anatomy of an Anthropomorphic Arm Essentially, an anthropomorphic robotic am, such as Lightarm, wnsists of a
shoulder, elbow, wrist and a hand or gripper as illustrateci in the schematic below. These
mechanisms are ~rpically not rnere prismatic or revolute joints but comprise gimbals, bd-
and-sockets, universal joints and cams. These provide more fluid and dextrous motion,
the better to emuiate the fanematics of a human am. To be tnily anthropomorphic, the
kinematics of an anthropomorphic arm should replicate those of its human co&terpart in
its fblI seven degrees-of-fieedom. The shoulder should be able to achieve 270" of pitcb,
180" o f yaw and 90" ofrd while the ehow shouid be able to achieve 150" of pitch.
F d y , ththe wrist ought to produce singuiarity-fiee movement through 170" of pitch, ?O0
of yaw and 90" of roil. The addition of a hand or gripper provides yet more dexterity.
IHand Wrist Joint
or
7 Elbow Joint
Shoulder Joint
End-eEector
Figure 2.12: Anatomy of an Anthropomorphic A m

2.3 Survey of Composite Robot Research For at lem a decade now, researchers have explored the application of lightweight
matends such as graphite/epoxy to the design of robotic m s . As mentioned eariier,
Gombert et al. at the Institute for Robotics and S ystem Dynamics of the German
Aerospace Research Establishment designed and built ROTEX an ultra-light carbon-fiber
grid structure manipuiator having a payload-to-weight ratio of 1 : 1. At the Technion in
Israei, Salomonski et al. [35] have designed a light manipulator with a 1: 1 ratio of payload
to weight based on an idfatable thin sheii structure. Such an arm could be folded into a
compact package, lofted into space and then depfoyed by inflating it with compressed air.
Yet another lightweight space robot, dubbed the Self-Mobile Space Uanipulator, has been
developed by Yangsheng Xu et al. 1361 at Carnegie MeUon. The 7-DOF arm is intended
for inspection, maimenance and construction of the tmsswork of Space Station Freedom.
In South Korea, Dai Gil Lee et al. [37] have designed and built a SCARA-type direct-
drive robot using graphitdepoxy. They have shown that, in addition to weight savings,
a the static deflection, natural fkequency of vibration and damping ratio were supenor in the
composite arm compared to its aluminum predecessor. The same authors [38] later
developed a &on-&er anthropomorphic arm which has 6 DOF, a 70 N payload and a
positional accuracy of 0.1 mm. The composite ami weighed a quarter of its steel
predecessor and exhibited a natural fkequency double that of the steel arm. The optimal
angle for the filament-winding of the grap hite/epow was determined to be 1 5". Finally,
these same authors [39] dso designed and fabricated the third arm of a 6-DOF articulateci
robotic manipulator with graphitdepoxy The cyiindrical structure is rated for a payload
of 60 Newtons and can achieve a positional accuracy of 0.1 mm. Once again they
observed that the composite a m exhibited ntperior damping and stifnless characte&ics
compared to the original aluminum prototype.
Thompson and Sung [40] have investigated the performance irnprovements
achieved by replacing the steel foream of a Generai Electric P50 industrial process robot
0 with unidirectional or MSO graphitdepoq laminates. Their findings indicate that

graphitdepoxy radicdy improves the damping and reduces the settling time. The
a darnping ratios were calculated to be 0.2 ai 500 Hz for the unidirectional and 1.1 at 500
Hz for the MSO. S i n c e the nahual fiequency ofthe graphitdepoxy forearm was estimateci
to be approltimately 500 Hz higher than its steel counterpart, the composite foreami has a
larger bandwidth and is thus easier to control. The same authon [41] have developed a
mathematicai methodology for optimizing the lay-ups of composite robotic arms7 taking
into account stifltness, strength, damping, and mass. Another laminate ophkation
technique for minimizing tip deflection of a robot link has been presented by Chao [42].
While some robotic arms move slowly enough that they may be considered quasi-
static, others accelerate and decelerate rapidly and thus require full dynamic analysis.
- Gordaninejad et ai. 143 -461 have addressed this issue using Hamilton's Principle and
Timoshenko beam theory to derive equations of motion of a laminateci composite flexible
robotic a m that take into accuunt the effects of geometric nonlinearity, rotary inertia and
shear deformaton. In subsequent papers, they investigated the effects of fiber orientation,
0 stackuig sequence and damping on d y n ~ c properties. Sung and Shyl[47] studied the
dynamic response of a box-beam link of a robotic ami. A ply orientation of 36.8"
optimked the s p d c damping capacity of the Link Caprino and Langelia [48] optimized
a robotic atm for rnaxburn fundamental fiequency using the Rayleigh-Ritz energy method
to fïnd an expression for the flexure of a beam.
Finally' the issue of controlling a flexible composite arm has been addressed in
numerous papers. Ghazavi and Gordaninejad [49] used nonlinea. controllers with P D
compensators to control a graphitdepoxy m. They observed the effect of the control
system on the new limer7 stiffer composite structure and compared it with the previous
dynamic performance of the duminum a r a The relative advantages of active and passive
control were d e d by Gordaninejad and Vaidyararnan [SOI with süi eye to reducing
end-effeçtor miration and setthg tirne. Lastly, Choi et al. [51] investigated the vibration
attenuation of a composite robotic arm using a non-linear state feedback controller.

2.4 Survey of Materials The foliowing table provides a summary of various hi&-performance engineering
materials that were considerd for aitical components ofthe Lightarm manipulator. Of
particular interest were materials with high stiflhess-to-weight ratio (i.e. specific stiifhess)
and high strength-to-weight ratio (i.e. specinc strength). The anisotropic nature of
graphitdepoxy is evident in the radical difference in the strength and stitniess in the fiber
direction vis-à-vis the matmt direction. In the fiber direction, graphitekpoxy exhibits
vastly superior specific dfkess and specinc strength than do the metals. In the mat&
direction, however, graphitdepoxy has relatively poor specific sziffhess and specific
strength. Thus, to design a pphitdepoxy structure requires carefdly tadoring the
orientation of each constituent ply to provide aggregate strength and e e s s properties
tbat are optimized for the loads and the geometry of the structure.
Steel AIS1 4340 Q&T 350 OC
Stainless Steel Type 440C
7860
7800 Tempered 3 15 OC 1
Table 2.1: Mechanical Properties of Some High-Performance Engineering Materiais 'dtunate **d
E-glasdepoxy (fiberglass) Graphitdepoy '
T300/N5208 (fiber direction) Graphitdepoxy
T300N5208 (matmc direction) Graphitdepoxy
L W 5 (fiber diedon)
207
200 1
1800 1600
1600
1547
(1900) 1062 1500
40
1724
39 181
10
126
26
26 (244) 590 938
26
1114
21 113
7
82
(830) 1720
(1590) 1970
(1 76) 219
(202) 253

a Aithough the mechaniai properties tabulated above were considered p m o u n t ,
they were not the sole factors in the materiai selection for the various cumponents of
Lightarm. Cost, rnan-fity, Wear and corrosion were also determining factors.
For instance, aithough titanium has excellent streagth and corrosion properties, it is not
only costly per unit weight but it is also difncult to machine which, in tum, transiates into
a hi& rnanufkcturing cost per part. Aluminum is considered a soft metai and, as such, is
easy to machine. The downside of that is, of course, that aliIminurn wears rapidly in
contact with harder metals such as steei. O f d the tabulateci materials, graphitekpoxy is
by far the most di f f id t to machine. Machining operations such dnlling, tapping, sawing
and rnilling are difECUIt with conventional High-Speed Steel (HSS) tools due to the
. intrinsic iiardness ofthe graphite fibers. Tungsten carbide-tipped or diamond-encrusted
tools are necessary to cut graphite/epoqr without inducing delamination, hying or
sphtering between the plies. In summation, for the Lightarm manipulator, the optimal
materials were stainless steel, aiuminum and graphite/epov. Dynamidy, the mass of the
shoulder mechankm wntn'butes vexy M e to the overail inertia of the ann. Thus, staioless
steel proved to be ideal for the shoulder where hi& strength, machinability, low Wear and
corrosion-resistance were of paramount importance. Unlike the shoulder, the mass ofthe
upper arm creates si@caat inertia Therefore, the hi& strength-to-weight ratio of
graphitdepoxy was optimal for the main upper ami structure while aluminum, being light
and easy to machine, proved to be ideal for the numerous smaller components that
comprise the elbow mechaniun and the for-

Chapter 3
The Shoulder Joint
3.1 Kinematics of Lightarm The Lightarm manipulator has seven degrees of fkedom. The shoulder
mechanism has three degrees of fiedom, the elbow one and the wrist three. The a m is
d d v e l y a hybrid seriaVparallel mechanism. The wrist, elbow and shoulder joints are
serial with respect to each other, meaning that each joint operates independently of the
others. Blrt the joints themselves are paraUeI mechanism. In a pardel mechanism, there
are two "platforms7' linked by two or more m o r s working concmently. For instance,
in the shoulder mechanism, illustrateci in Figure 3.1, the H-Base and the SRC Hange are
the two "patfom" which are linked by the shodder's four p d e l achiators. Seriai
actuation has certain iaberent shortcomings, such as Iack of structural rigidity, Iow naturaf
kquency as weil as accumulation of positionai error. Not ody does pardel actuation not
suffer h m these tbree problerns but, in addition, pimilel actuation dows for high
bandwidth and workspace augmentation as weU as backlash elirninaaion tbrough the use of
acnLator redundancy [52]. By arranging the three paraliel mechanisms (shoulder, elbow
and wrist) in series like in a human arm, the advantages of both seriaf and parailel
actuaton can be exploited to maximh the performance of Lightarm
From a kinematic standpoint, the shouider is a combinafon'al mechaaism in which
its four aCtLiafors work in pamllel. In auTent robotics jargon, such an arrangement is
termed "achiator-redundant" although this nomenclature is siïghtly misleadhg because in
fact no acaiator is trdy redundant and ail contriiute to the motion of the shouider. The
term remindant arises fkom the fact that, in the ment that one of the four actuaton fds,
the shoulder will continue to fhction, albeit with a greaUy diminished workspace.

Moreover, actuator-redundancy enlarges the workspace, eiiminates singdarities and
irnproves the overall structural ngidity of the mechanism (53-551.
The shouider is capable of producing an acceleration of 130 m/s2 at the wrist joint.
The maximum veiocity at the wrist was mea~u~ed to be 0.45 d s . The theoretical
singdarity-f?ee workspace of the shoulder mechankm was calculated (assuming ail parts
have zero thickness) to be 180" of tilt in both directions and 270' of swivel. The first
prototype achieved roughiy 90° of tilt in both directions and 180" of swivef.
Figure 3.1 : Shoulder Joint Nomenciature
3.2 Redesign of the Shoulder Mechanism The initial shouider prototype was designed and built by the Sarcos Research
Company of Utah Essentiaiiy, the design was successfùl. The shouider develops a
surprishg 200 Nm oftorque around ail three axes over a bmdwidth of 100 Hz and the

moviog mass of the shoulder is only approximately 1 kg. Despite this remarkable
0 performance, however, there were two problerns with the design. First of aii, the base was
too narrow and consquently not partidariy conducive for attachent to a boom or
vehicle. From a stabiiity point of view, it is preferable for the points of attachent to be
spread mher apart in order to diminish the moment appüed to the boom or vehicle as the
arm manipulates a heavy payload. Thus, a new H-Base (so termed for its shape when
viewed ftom above) was designed to meet this requirement. Retaining the key dimensions
and kinematic parameters of its Sarcos predecessor, the H-Base is more easily adapted to
mobile bases and booms. Constnicted of Stainiess Steel Type 304, the N-Base, shown in
Figure 3.2, houses the shouider's four actuators which power the shouider mechanism.


The Animate Systems hydraulic achiators nui at a mere 500 psi (3.45 MPa) which
is a substaotidy lower and safer pressure than the 3000 psi (20.7 MPa) most commonly found ia industrial robot hydraulics. Despite the low operating pressure, each actuator is
capable of deveioping 300 pounds force (1340 Newtons) while displacing the piston at up
to 10.2 cmk. The mass of each actuator is 612 grams. Wïth a damping factor of 0.14,
the actuators create a beneficïal hydrauiic darnping &ect in each of the joints of the
robotic arm. The natural fkequency of each achuitor is 394 Hz which makes control
feasible. Each actuator is equipped with Teflon-sealed pistons and is piggy-backed with
its own suspension electromagnetic jet pipe valve and an LVDT position transducer which
tracks the piston throughout its 7.2-cm stroke. The black horseshoe-shaped object at the
end of each aauator is a Hall E f f i force transducer. Pareatheticdy, two identical - actuators drive the elbow mechanism t56-621.
Following the cornpletion of the Sarcos shoulder prototype, tests conducted to
gauge the dynamic and kinematic characteristics of the new mechanism resulted in a
e broken centrai SM. Consequentiy, a much stronger central shaft wss needed. At the
same tirne, it became apparent that the a d workspace of the shoulder was not even
close to what was theoretidy possible. Thus, the challenge was to design a centrai shafi
and universal joint that not ody darged the workspace volume of the shouider
mechanism, but dso improved its strength and robustness.
h order to maximize the workspace volume of the shoulder mechanism, the gap
between the bearing mounts of the H-Base, A (shown in the figure below) had to be as
large as possible. However, fkom a k i n d c standpoint, it would not to, say,
spread the bearing mounts fkîher apart because this wouid only reduce the laterai
workspace of the shoulder. The distance, D, between the bearing centers had b d y been
optimi7.ed by gqhical techniques and by constmcting a wood and Lucite model. Thus, a
finite-dement mode1 was used to determine the minimum wa(l thickness, t, that would
&y withstand the loading of the actuators. Akhough it ultbately didn't prove to be a
6 consideration, it should be noted here that the minimum wall thickness is also governeci by

the practicalities of machiring. To acairately bore a hole to the tolerances required for
the oeede roller bearings, a minimum wall thickness is required or else the cutting force of
the boring bar or reamer will cause the metai to deflect locaily thereby niining the
cyhdricity of the hole. The second design critenon was, of course, to ensure that the
deflection ofthe H-Base was as minuscule as possible so as to make control of the moving
Bearing Mount : t + i . . . . . . . S . . . . I
f
l Figure 3 -3 : Kinematic Parameters of the Shoulder
A finite-eiement model was coflsthlcted using 8-node solid brick, 6-node soiid pie-
slice and 4-node thin-shell elernents. The thin-shell elernents were used to model the
bearing mounts so that the wd thickness could be varied. The results of the seven
iterations are presented in Table 3.1. From the finite-element modeling, when the wd
thickness M s below 2.0 mm, the highest Von Mises stress is located on the thin wall of
the bearing mounts. When the wall thickness equals or ex& 2.0 mrq the highest Von
Mses stress is no longer located on the thin waü of the bearing mount. Rather, the
W e s t stress migrates to a point on the horizontal extension of the H-Base, as iIlustrated
in the figure below. It is W e s t from the foregoing table that the Von Mises stress
becornes asymptotic at 212 MPa and that the oprimal waii thichess for the beariog
mounts of the H-Base is 2.0 mm, a thickness beyond which the Von Mises stress remains
&ectvely constant.

Table 3.1 : Fie-Element Analysis Iterations for Wall Thickness of Bearing Mounts
I Figure 3.4: Stress Contours in H-Base for a Wall Thïckness of 2.0 mm

Design of Universal Joint At the k i n d c center of the shouider mechanism is a universal joint whose sm&
size is d c a i in the performance ofthe shouider. Once again, to ensure that the shoulder
joint enjoys a large range of motion, the universal joint had to be as small as possible, yet
be able to withstand the large loads imposeci upon it by the four actuators. AU the
wmponents of the U-joint are Stainless Steel Type 303 which has high strength,
corrosion-resistance and contains a trace of Sulphur which makes it easier to hachine than
the other 300-series stainless steels. The HK0408 TN drawn cup needle rouer bearings
determine the minimum dimensions of the universal joint since they are the d e s t
bearings capable of safely taking the loads imposeci upon them by the four aauators. The
- inside ofthe forks ofthe U-joint have been rounded in order to provide smoother motion.
In order to prevent the prongs of the "centercube" fiom sliding through the needle rouer
bearings, four conical black Delrin spacers were machined to mate with the conical section
of the centeraibe. These items are visible in Figure 3 S.

3.4 Stress Analysis of Centercube The four-pronged "centercube" is shown in plan view in Figure 3.6. The part has
two planes of symmetry which are exploited to reduce the scope of the finite-elernent
model.

- - - - - - - --
Figure 3.6: Plan V i e ~ of Centercube
Built of high veld strength precipitation-hardened (PH) stainless steel, th is
component withstands stresses of 183 MPa as iiiustrated in Figure 3.7. The worst-case
loading of the centercube would occur ifthe controller mistakenly drove both pairs of
actuators antagonisticaily. Since each pair of actuators operates at roughly 90' to the
opposite pair, the total force generated in the vertical plane is:
F = 2&(1340 N ) = 3790 N (3.1)
This load is then divideci between the central shaft and the two actuator output
linkages. Therefore, ody one-third of the total load is felt by the centercube, of which
only a quarter of that (or one twelfth of the total) is felt by each prong. A nnite-element
mode1 of one such prong was constructed using 8-node solid brick elements and 6-node
solid pie-slice elements. Assuming a yidd strength of 350 MPa, the factor of çafety for
the centercube is 1.9. It should be recailed that this loading only occurs if all the
actuators are rnistakedy driven antagonistically. In proper usage, the centercube is not
subjected to such loads. In fact, under normal operating conditions, the load on the
centercube is merely the centrifùgai force due to the rotation of the a m about the
universal joint. This centrifùgal force is practicdy negiigible due to the low anguiar
velocity of the ami about the universal joint.

r
VON MISES STRESS @Pa]
Figure 3.7: Stress contours on one of the four prongs of the centercube
By minimizing the dimensions of both the universal joint and the w d thickness of
the H-Base, the shoulder joint now exhibits an excellent range of motion as illustrated in
Figure 3.8.


Chapter 4
The Elbow Joint
4.1 Design of the Elbow Mechanism Whereas the weight of the shouider mechanism was not aU that critical, the weight
of the elbow mechanism contnbutes very significantly to the overd inertia of the
. manipdator. Thus, the driving factor in the design ofthe various components of the
elbow mechanism was strength-to-weight ratio. There are essentidy two critical
components that require extensive analysis: the main actuator shafts and the box-beam
that houses the elbow mechanism. But before proceeding to the finite-element analysis
iterations, it was fkst necessary to determine the loads that act on these components.
4.2 Force Analysis
As a worst-case loading scenario, one can imagine the arm attempting to iift an
ùnpossibly large mass. In nich a case, the gripper (or end-effector) of the arm is
constrained and the arm bends under the load of the shouider's four actuators. Thus, to
cornpute the worst-case loads acting on the box-beam, we sum vectorially the actuator
forces. For the principal (strongest) direction, we get a force of 3790 Newtons.
Figure 4.1 : Vector Force Andysis

Tbtal Force = 2 f i ~ = 3790 N (4- 0 For the weak direction, the load can be calculateci by cdculating the moment
produced when each pair of actuaton acts antagonisticaliy, as Uustrated in Figure 4.2.
Figure 4.2: Vector Force AnaIysis for Weak Direction
Figure 4.3 : Key Dimension of Shoulder

Figure 4.4: Vector Moment Analysis
Therefore, the equivalent load at point B that would produce this torque is:
In summary, the loads acting on the box-beam of the elbow mechanism are shown in
Figure 4.5:

I
Figure 4.5: Forces Acting on Elbow Box-Beam
4.3 Design of Composite Box-Beam The matornicd analog of this box-beam is an insect's exoskeleton. The box-beam
houses and protects the upper ami's actuators which act antagonistically similady to the
biceps and triceps of a human m. A materid with high specific strength and high specïfic
e e s s was sought to ensute thar the box-beam is both rigid and strong yet light enough
to ensure that the inertia of the a m is kept to a minimum- The graphitekpoxy composite
used for this component was an Advanced Composites Group LTM.25 prepreg with the
foilowing properties [63] :
1 P 1 1547 ELg/rn3 1 Table 4.1 : Mecbanid Properties of L W 5 Graphite/epoxy
EX EY Es XT & YT
126.2 GPa 10 GPa 2.1 GPa
1724 MPa 1055 MPa 40 1Wa +

4.4 Finite Element Analysis Using 1-DEAS Master Series 2.1, a finite element mode1 consisting of 1470 thin-
sheil elements was solved for a varie* of lay-ups. Optimization was performed using an
intuitive trial-and-error approach. The optimal lay-up was an 8-piy Iamiaate, [02/45/-45]s,
which provided a worst-case factor of safety of 1.7 in matrix tension in the two -4S0
layers. The addition of the 1 mm thick stainless steel end-fitting improved the factor of
safety in matrix tension in the two -4S0 layers fiom 1 -2 to 1.7. The [Oi/90] s labinate was
second-best with a factor o f safety of 1.4 in matrk tension in the two 90° plies. It is
interesthg to note the shear-strengthening eEect of the 4S0 plies; while the [02/45/-451s
laminate had a niinimum factor of safety of 3.2 in shear, the [03/90]s had a uniform safkty
factor in shear of only 2.0. Lastly, the angle-plies fared unexpectedly poorly. Neither the
[(f30)2]s laminate nor the [(+15)& laminate was able to withstand the loads. The
stresses in matrix tension in numerous plies were greater than its strength. Although the
[(flSh]s lay-up was us& with success by Dai Gd Lee et al. [3 81, it did not prove to be
very effective in this application largely due to the fact that the largest stresses were not
due to bending but rather due to the loads on the holes. For withstanding this particular
combination of loading, a laminate composed of O0 and *45" plies provides the highest
minimum factor of safety, as shown in Tables 4.2 to 4.8.
inch core without stainless steel end-fitting
7 8
Table 4.2: Factors of Safety using Maximum Stress Critenon for [02/45/-451s with ?4
O O
7.2 7.2
5.7 1 2.2 5.7 1.3
15.8 4.6
10-0 5.3

core and stainless steel end-fitting
1 7.3 6.2 2.7 21.4 4.5 2 3 4 5 6 7 8
Table 4.5: Factors of Safety using Maximum Stress Criterion for [(rt30)& with 1/4 inch core and stainless steel end-fitting
1 2 3 4 5 6 7 8
Table 4.3 : Factors of Safety using Mkximum Stress Criterion for [Od45/-45]s .sith ?4 inch
O 45 -45 -45 45 O O
Table 4.4: Factors of Sat%ty using Maximum Stress Criterion for [03/90]s with ?4 inch core and M e s s steel end-fitting
O O O
90 1
7.3 3 -9 13.4 13.5 3 -9 7.3 7.3
5 -0 5.0 5.0
6.2 7.0 5.5 5.5 6.8 5.8 5.8
5.6 5 -7 5.8
2.7 2.0 1.7 1.7 2.0 2.7 2.7
6.1 6.4 6.4 6-4
90 2.0 2.0 2.0 2.0
1.4 3 -4 3 -4 3 -4
19.0 19.0
21.4 19.5 20.8 11.9 19.5 21.4 21.4
2.0 2.0 2.0
15.5 15.3 15.3 15.3
3 -4 1 15.3
6.1
4.5 3.8 3.2 3.6 3.7 4.5 4.5
2.0
3 -4 3 -4 1.4
O , 5.0 I
15.3 25.3 16.6
O O
5.0 5 .O

core and stainless steel end-fitting
7 8
7 O 7-0 6.8 1.3 11.3 3 -8 8 O 7.0 6.8 1.3 11.3 3 -8
Table 4.8: Factors of Safety using Maximum Stress Criterion for [0d30/-301s with Yi inch core and stainfess steel end-fittbg
Table 4.6: Factors of S a f i using Maximum Stress Criterion for [(irl5)2]s with '/4 inch
-1 5 15
5 1 4 5 6 1 45
7.4 1 6.6 4.0 7.6
Table 4.7: Factors of Safq using M;urimum Stress Criterion for [&15/+45]s with % inch core and stainfess steel end-&hg
15.5 4.0
7 8
-15 15
0.8 1.8
6.1 7.0
9.5 9.2
1.2 2.1
7.7 4.9
2.2 2.3
1-4 1.3
5 -2 5.6
13.6 14.6
4.1 3 -9
8-3 8.9
1.5 1.5

Table 4.9: Factors of Safety using Maximum Stress Criterion for [02/45/-451s witÏÏ s t a e s s steel end-fttmg but no core includïng 4 woven patches over hole regions
/'
/ Con
I Figure 4.6: Fiber-Diection @) Stress Contours in Top (O0) Ply of a Simple Cantiievered Box-Beam (Without Holes)

F
Figure 4.7: Fîber-Direction (X) Stress Contours in Top (O0) Ply of a Cantitevered Box- Beam due to Transverse End Load and In-plane Load at the Holes
STRESS
--
Figure 4.8: Stress Contours around Holes (Top PF)

Figure 4.9: Close-up of Matrix-Direction (Y) Stress Contours Around EIole-(~o~ Ply)
Shown in the table below is a cornparison of the stresses due to bending and
bearing. Cleariy, the bearing stresses (stresses at the holes) are more severe and thus
dictate the design of the box-beam.
' Load Type - - -- 1- & ----
Table 4.10: Cornparison of Bending and Bearing Stresses in a 0' Ply
- - -:--y -- - -TL-. - ;
3 MPa
9 MPa
-78 PviPa
-103 MPa
v
Bending 78 MPa
-- - - - --.Yi - - . - --- .-
- . . -
-3 MPa
-9 MPa Bearing
- -- s 1 - --- - - - - -
O MPa
4 MPa 108 Mi?a I

STRESS [kpal
Figure 4.1 ress arcund Hole (Top Ply)
un Stress
i figure 4.1 1: X-Stress Contours in 45O ply

I
Figure 4.13 : XY Shear Stress Contours in 45O ply

4.5 Modification o f Box-Beam to Improve Elbow Joint Kinematics
After the elbow joint was assembled inside the composite box-beam, it becarne
apparent that the elbow joint was not achieving its full range of motion due to interference
with the box-beam. With the complete box-beam, the range of motion was approxhte1y
90" whereas a fUy anthropomorphic elbow mechanism ought to have a pitch of roughly
150". Shce the maximum stresses in the box-beam are concentrateci primarily around the
hoies and at the bottom end (due to the cantilever effect), it was possible to safely cut
away a dot at the top of one of the narrow faces as iliustrated in the figure below. The
amount to be cut away was deterrnined graphically to be a math 60 mm wide and 90 mm
deep. T b would ailow the elbow mechanism to rotate through a full 150". A new finite-
element model was run to c0di.m that the machiauig of the dot would not have any
deleterious eEècts on the structurai integr@ of the box-beam. The redts tabuiated below
verm thaf in fàct, no m d g M ioss of strength occurs.
4.14: Dimensions of SIot

Table 4.1 1 : Factors of Safety using Maximum Stress Criterion for [02/45/-451s with stainless steel end-*% no core, 4 woven patches over hole regions, and slot
1 -103.0
Figure 4.15: X-Stress Contours in Box-Beam with Slot (Top Ply)

I -1 1-5
Figure 4.16: Y-Stress Contours of Box-Beam with Slot
4.6 Theoretical Deflection of Box-Beam It is always good engineering practice to validate finite element andysis with '%and
ddat ions" . The vertical deflection of the graphite/epoxy box-beam by the finite
element method was 0.3 8 1 m. This can be verified analyhdly by applying Cdgliano' s
energy method [3 7J where the weight per unit length of the box-beam is neglected. In
Equation 4.9, the first term is the standard andytic solution for the deflection of a
cantilevered barn and the second tem represents the shear correction.
PL3 tL (h5+b5)p w = -
3ET + m r 2
where 1 = 2.096 X 1 O-' m4
1 An2 E = h(A,, -7) = 141 GPa

Not only does this calculation venQ that the finite element model is accurate but it
demonstrates the importance of the shear correction tenn, which accounts for 0.130 m or
34% of the deflection. While it is common practice to ignore the shear correction term
when dealing with long isotropie bems , the shear deformation becomes critical when the
ratio of the length of the beam to its thickness (measured in the bending plane)-is less than
10 and when the degree of anisotropy is large [64,65]. Care must be taken in judging the
degree of importance of the latter, as certain fomulae for box-beam deflections, such as
the one proposed by Tsai [66] neglect the shear correction:
h where 1' = (3a2b +a3)-
6
where a and b are, respectively, the height and width of the box-beam
a W =
(3 79ONxO.3 15n~)~ 3(14 x 1 0 ~ ~ a ~ l . 2 9 x 10" m4)
The shear-corrected deflection solution can be corroborated by Bank [67,68] who
used the TUaoshenko/Cowper Method, as foiiows:

A fourth and &al analytical solution, proposed by Caprino and LangelIa 1481 is
adduced as M e r corroboration of the finite-element deflection results. In the following,
S represents the shear rigidity, A the cross-sectional area and c the shear factor [69]. The
general fom using the Rayleigh-Ritz energy method assumes a cosinusoidal
D ir where K = shear comection term = -(pl2
S 2L
Obviously, the mitximm deflection occurs when sin a>t = 1 and when x = L
where
deflection:
(4.24)
(4.25)
The five solutions to the defl ection of the box-beam are summarized in Table 4.1 2.
With the exception of Tsai's solution, which does not correct for shear defornation, the
four remaining solutions are consistent within two hundredths of a millimeter.
I Castigliano's Method [37l I 0.385 I
Method of Aoalysis I Deflection [mm]
I Tsai [66] without shear cornecbon I 0.22 I
1-DEAS Finite-element halysis
1 Timoshenko/Cowper Method [67,68] 1 0.402 1
0.381
I Rayleigh-Ritz Energy Method [48] I 0.405
Table 4.12: Siimman, of Box-Beam Defieetion Solutions

4.7 Theoretical Stress Analysis
4.7.1 Bending Stress First, the on-axis modulus matrix is caiculated [70]:
Ex = 126.2 GPa
Es = 2.1 GPa
Q, = rnE, = 127.1 GPa Q, = mE, = 101 GPa
Q, = rnvyE, = 3.0 GPu
Q, = Es = 21 GPa
where rn = CI - V,V,]-' = [l - 03)(0.024)r1 = LOO7
Now the off-axis moddus matrix is calcuiated:
where
1 Q,, = -U2 sin 28 + U, sin 40
2 1 & = -U2 sin 28 - U, sin 48 2

where
Thus, the off-axis rnoduli of each ply can be calculated by substitution of the appropriate
angle into the above expressions. Since the laminate in question is [02/45/-45]s, we need
o Q calculate the off-axis moduli of the O* and 45' plies.
3.0 O 1
To obtain the strain in the various plies of the box-beam, the curvature of the bearn mua
For laminates, E m u t be replaced by an effective modulus defined as foliows:

nius, the mat& [a], representing the laminate cornpliance, is required. To obtain [a], its
inverse, the laminate moduius [A], must fint be calculateci.
where
where h is the thickness of the laminate.
But [a] = [A]-'
--. [a] =
*: Ep = I
= 68.5 GPa 0.0 146
Ne- the moment of inertia is computed, based on the geometry shown in Figure 4.17.
Figure 4.17: Dimensions of Box-Beam

Therefore, in the plane of the largest load, the curvahire in the box-beam is:
Accordingly, the induced curvatures are:
Kz = -u;,K,
K3 = u:,K,
where the couphg constants are defined as:
The strain in a ply is related to the curvature in the following marner:
where z is defked below in Figure 4.18.
rn Figure 4.18: Ply Distance from Neutrai Axk

Tabie 4.13: Ply Strains
F M y , the off-axis ply stresses can be calculated using the stress-strain relations
involving the modulus matrix [QI for each ply.
which c m be expandeci as follows:
Thus, for ply 8, oriented at 0°,
Similarly, for ply 6, oriented at 45O,
O, = (3 7.8 GPa)(6.19 x 1 04) + (33.8 GPa)(-4.74 x 1 04) = 7-4 W a (4.78)
O, = (33.8 GPa)(619 x 10 J, + (37.8 GPa)(-4.74 x lo4) = 3.0 MPa (4.79) O, = O W u (4.80)
Evidentiy, the bending stresses are quite low. This is rather intuitive since a box-beam of
these dimensions has such a large moment of inertia, that an end load of 3790 Newtons is

not enough to create much flexure. However, the stresses due to the Ioading at the holes
is much more severe and is ultimately the criticai aspect in the ove@ design
4.7.2 Stresses at Holes The actuators that drive the eIbow mechanism are comected to the box-beam by
two shafts. The maximum load of each actuator is 1340 Newtons, which is transferred to
the four holes of the box-beam,
I I
Figure 4.19: Loading of Holes by Actuators
The three hdarnental stress components around a pin-Ioaded hole are bearing, tende and
shear, whose average values are:
where t is the thickness of the laminate, P is the applied load, d the diameter of the hole, e
the distance fiom the edge and w the width, as shown in Figure 4.20.

I Figure 4.20: Dimensions of a Pin
a* = 1340 N
= 63.4 MPa (132 nim)(16 mm)
q = 1340 N
= 7.2 Ma (1 57.7 mm - 1 6 mm)(l3 2 mm)
CT, = 1340 N
= 21.1 lMPa 2(24 mm)(132 mm)
To ver@ the finite-element analysiq the bearing stress should be calcuiated "Iocally" on
the segment of the hole which is Ioaded the inost. Since the Ioad in the finite-element
mode1 is distributed cosinusoidally over nine nodes, one approach would be to cdculate
the bearing stress by considering o d y the three nodes with the Iargest applied loads:

Figure 4.21 : TImree Nodes with Highest Loads
The sector over which these three loads are distributed is obtained f?om the arc length:
(300 + 400 + 300) N 6, = = 1 3 4 W ~
(13 2 mm)(5.65 mm)
Accordhg to Eckold [71], ifthe ratio of the hole diameter to the thickness of the
laminate is greater than iloity, as it is in t h i s case, then the maximum bearing stress is
diminished unless ciamping pressure on the laminate is applied. Using plies and
intaference Ms attenuate the stress. Generally, it is preferable for the bearing stress to
exceed the t e d e and shear stresses for the simple reason that bearing fdure is t y p i d y
not catastrophic. The expected mode of bearing fadure would be chamcterized by shear
cracks induced by local compression [72-741. 1t is important to emphasize that bearing
strengths can be greatiy weakened by defects caused by imperfect rnachining techniques
4.8 Box-Beam Cornparison
For the sake of cornparison, two box-beams, one steel and one aluminum, ofequal
walI-thickness were also anaiyzed for maximum principal stress, m;urimum deflection, and
natural f?equency. For the latter, 1-DEAS Master Series 2.1 computed the three natural

frequencies ushg Constraint Mode Dyaamics, a vector iterative solution. Note that for
a the two metal box-beams, the factor of sdety is caldated by simply divïding the
marùmum principal stress fiom the finiteelement anaIysis by the yield strength. For the
aiuminum box-beam, the m e u m principal stress was 1 10 MPa whereas for the steel
box-beam the maximum principal stress was only 87 MPa. Although the stress around the
holes is due prirnarily to the direct Ioading of the holes through the main achiator shafts,
there is also a minor contribution from the bending of the box-bearn due to the end load.
Since the steel box-beam has the highest yield strength and highest flexurai rigidity, its
factor of safety is highest and its maximum deflection is Iowest. For the graphitdepoxy
box-beam, the safety factor is the minimum value of the ail the safety factors previously
calculateci and tabulateci. The results are summarized in the table shown below:
1 - Factor of Safefy I 2.2 I 2.2 I 2.8 I L
Max, Deflection
Mass
0.38 mm
Deflection x Mass
Vertical Nat. Freq.
418 g
Horizontal Nat. Freq.
Table 4.14: Cornparison of Box-Beams made of Graphite/epoxy, Aluminw and Steel
0.35 snm
159 gmm
576 Hz
Extensional Nat. Freq.
Although the graphitdepoxy box-beam has the lowest çafkty factor and deflects
the most, it is by far superior to the aluminum and steel box-beams on a per mit mass
basis. Moreover, the graphitdepoxy box-beam exhibits rnuch higher natural fkequencies.
This is partidarly signiscant in controlling the overd robotic am. lfthe naturd
Erequency fals below the sampling rate (in Hertz), then the control system c a ~ o t react
properly. However, it should be noted that to tnily evduate any improvements in n a t d
fiequen& the entire arm should be considerd as a whole. In addition, the epo>sr matrix
0.11 mm
729 g
1064 Hz
2133 g
255 g-mm
148 Hz
1206 Hz
235 g-mm
245 Hz
185 Hz 290 Hz
209 Hz 297 HZ

has superb damping characteristics [78] which help to reduce the vibration of the links and
a ultimately lowers the settting tirne of the end-effector.
4.9 Fabrication of GraphiteIEpoxy Box-Beam The box-beam was fabricated using L ' I l05 graphitdepoxy prepreg furnished by
the Advanced Composites Group. An extemai aliiminum mold was designed so as to
achiwe a smooth extemal &ish on the composite part. This also ailowed the extemal
dimensions of the composite box-beam to be precisely controlied so that it would mate
with the stainless steel end-fitting, allowing for a bond thickness of 0.50 mm.
The fàbrication procedure was relatively straightfiorward. Firsf the inside of the
mold was coated three times with Frekote Seaier B-15. Then, three coatings of Frekote
700-NC release agent were applied [79]. Four unidirectional plies were cut f?om the roll
of prepreg to slightiy langer dimensions than the actual interior surface area of the mold to
d o w for overlap. Laying these large plies proved to be rather arduous due to the
tackiness of the materiai as well as the limited space inside the moid. This was overcorne
by slicing each ply into four thin strips. The k45O plies were nit diagonally fiom a woven
prepreg (0°/900). Angle-plies (Ho) can also be made ftom unidireaional plies by using a
paper-folding technique [80] which reduces the amount of scrap as well as the cuttuig
time- For two of the composite box-beams, honeycomb cores were sandwiched between
the layers of the grap&e/epoxy to give the faces additionai rigidity [8 11. However, both
the duminun flex-core and the Nomex honeycomb hindered the compaction of the layers
around the corners of the box-beam In the end, it was decided that the rigidity of the
faces of the box-beam was non-essential. Since the honeycomb adds practically nothing to
the in-plane strength amund the box-beam's four holes, the honeycomb was discarded
fkom the design Four patches of woven LTM25 graphitdepoxy were used to reinforce
the hole regions. In addition, four Renshape blocks were inserted under the woven
patches to improve the rigidity of the hole regions and to fàcilitate the machining of the
holes.

a 4.9.1 Vacuum-Bagging Technique Once the plies of graphitdepoxy have been properly pressed down to remove
bubbles and wrinkles, a release nIm coven the plies and prevents the breather fiorn
stîcking to the epoxy during the cure cycle. The breather is permeable to air but prevents
the epoq from being drawn into the suction. The vacuum bag is then wrapped around the
mold. In the case of the extemal mold, two bags were used, one on the inside and one on
the outside of the moid. The imer and outer bags were then joined and seaied using sticb
gua The bag is pierced and the vacuum valve seals the opening [82].
Reiease Film 7 Vacuum valve
Figure 4.22: Vaccum-Bagging Technique
Findy, approxhately 1 atmosphere of vacuum is draw and the lay-up is then cured in an
oven following the temperature cycle shown below.
--
Figure 4.23: Cure Cycle for LTM25

Upon completion of the cure cycle, the mold is opened and, if the Frekote release
agent was properly applied, the graphitelepoxy box is easily removed.
Figure 4.24: Rernoving the Cured GraphiteEpoxy Box-Beam f?om the Aluminurn Mold
4.9.2 Machining of the Box-Beam
To uudertake precision machining of the graphite/epoxy box-bearn at McGill
proved to be an arduous task because tungsten carbide-tipped or diamond-encrusted took
are required. Secondly, not only is the carbon dust a carcinogen but it also dirties the gear
trains of conventional machine tools. For these reasons, the graphite/epoxy box-beam
was d e d ground and drilled by Progressive Machine Works in Anjou, Quebec.
4.10 Box-Beam Strength Test
Ln order to ascertain whether the preceding cornputer models and calculations are
accurate. a tension test was performed on one of the graphitdepoxy box-beams in an MTS

machine [83]. The box-beams were designed to withstand a load of 1340 Newtons on
each hoie with a factor of safety of 2.2. To simulate the efféct of two actuators loading
the shafls that are restrained by the holes in the box-beam, a load was applied at the center
of the shafts which by symmetry distributed itself equdly on aii holes. Thus, wMe the
MTS machine applied fkom O to 10 kN, the load appiied to each hole varied fkom O to 5
Although the box-beam was expected to f d at a load ofapproximately 3 kN (per
hole), taking into consideration the factor of safety of2.2, in actudity the box-beam

SuTVived the fidi 5 kN per hole. At that point, however, bearing fidure became
observable. The foliowing graph shows the tende load on each hole as a fùnction of
displacement. The discrepancy between the theoretid and experirnentd strength of the
box-beam is explained by the k t that certain values for the mechanical properties of the
L M 5 graphite/epoxy were unavailable and hence had to be infared fiom the data sheet.
Tensik Load vs. Displacement
Figure 4.26: Linear Variation of Tensile Load with Displacement
4.1 1 Stainless Steel End-Fitting When selecting a method of joining graphite/epoxy to metal, the factors which
should be considered are the magnitude of the force involveù, the geometty of the parts to
be attached, whether disassembly is reguired, cost and rehbiiity. Both bolted and bonded
joints have numerous Avantages. Whereas bolted joints are bighty reliable, conducive to
inspection, resilient to fktigue and d o w for repeated assembiy and disassembly, bonded
joints enjoy a greater bond efficiency (bond strengtldweight of joint), reduce the number
of parts involveci, minimi7e corrosion and avoid pro blems of lammate strength degradation

incurred when drilluig holes in composites [84-861. The choice to bond the end-fitting
bracket to the graphite/epoxy box-beam was largely due to availability of a large, easily
arcesseci bond surface as well as the desire to preserve as much as possible the stmctural
integrïty of the box-beam by avoiding unnecessary holes. The second fundamentai
decision was the type ofmateriai to be used. Since graphite is an extremely cathodic
materiai, the choice of material is not merely a fùnction of strength, stif£hess and density.
When dissimilar met& are in contact in an electroiytic environment there is a gaivanic
potential developed between them [87,8 81. The engineering materials that are least
conoded by graphite composites are titanium and stainiess steel [89]. As shown by the
Est of metals in Appendix D, aluminum wodd have been a poor choice for the end-fitting.
Aithough the adhesive itselfacts as the primary protection against corrosion in
graphite-to-metal bonded joints [go], fkther protection can be acquired through the use of
an etchant, especiaily needed when joining aiuminum to graphite. Yet another factor to
be considered in joining metais to graphite is thefmal expansion. The t h e d misrnatch
8 between dirminum and graphite is the most severe while graphite and titaniurn is
minimum Although titanium is most compatible with graphite, it is an expensive metai
and one that is diEcult (and hence costly) to machine. For the Lightam manipulator,
where temperature variations are minor but where the environment might lead to
corrosion, stainless steel was selected as the simplest and most cost-effective solution.
Io a bonded joint, there is a stress concentration at the edge of the bond. Thiç cm be
attenuated by approximately 50% by tapering the metal end fitting. The optimal chamfer
angle has been determineci to be roughly 7 O [91,92].
1
Stainless steel : a=0.4mm I
b = 3 m m A
Figure 4.27: Dimension of End-fitting C h d e r

4.12 Stress Analysis of Adhesive Bond A fite-element mode1 consihg of 522 soiid brick elements was constmcted to
shidy the stresses present in the adhesive bond during a worst-case static loading of the
manipulator. The moment produced by the cantilever load of 3790 Newtons is
counterbalanced by the shear forces in the bond. The magnitude of the shear forces is
readily obtained by a simple moment balance. The bond thichess was chosen to be 0.5
mm [93,943. The resuits of the FEA show quite ckarly that the areas of m&um stress
are Iocated at the cwved corners.
... . STRESS [MPul 12,:
20.:
18.C
1 S.1
t 3.6
L 1-4
6.5
4.7
Figure 4.28: Von Mises Stress Contours in the Adhesive Bond
1 Hysol 1 EA 9412 1 27.6 1 Hysol
Hysol
EA 9430
EPK 0151
3 1.0
12.8

I Loctite l Depend 330 I 18.6 I Ciba-Geigy
Ciba-Geigy
Clearly, by using the Hysol EA 9430 (which is highly recommended for bondmg
stainless steel to graphitdepoxy), a factor of safkty of 1.4 is achieved. It should be noted
that the cantilevered load of 3790 Newtons represents an absolute worst-case scenario and
thus the bond is unlikely to be messed to the 22.5 MPa caiculated by the finite-elernent
model. Fiyre 4.29 illustrates how the stainless steel end-fitting mates with a cutaway of
the graphitdepoxy box-beam.
Ciba-Geigy
Araldite AW 1 3 8 M 998
Arafdite AW 106/fl[V 953
16.7
27.4
Table 4.1 5: Survey of Epoxy Adhesives - Adapted f?om [95-971
Araldite AW 136/EfV 994 23.5

Steel and Cutaway Box-Beam

4.13 Stress Analysis of M6 Screws There are four M6 hex-socket cap screws that fasten the SRC flange to the
stainless steel end-fitting. As illustrated in Figure 4.30, the worst-case loading scenario for
the M6 screws occurs when the shoulder exerts its maximum force of 3790 Newtons and
the eibow is M y restrained.
SRC 3790 N Box-&am I
~ i ~ u r e 4 . 3 O: Cantilevered Loading of M6 S crews
The moment created by the end load of 3790 N has to be counteracted by the four
M6 hex-socket cap screws that c o r n the box-beam's stainless steel end-fitting to the
SRC shoulder flange. Mathematically, this moment equilibrium gives us the force, F,
acting on the M6 screws. The top two screws are obviously in tension (ifthe end load is
downward, as illustrateci) while the bottom two screws are in compression.
M = (3 790 N)(03 15 m) = 4F(45.9 x 1 O-.' rn)
:. F = 6502.4 N
The tensile-stress area, 4, of an M6 screw is 20.1 mm2 (obtained from the mean of
the pitch diameter and the minor diameter). Thus, the tende (or compressive) stress in
each M6 screw is:

In this application, the M6 cap screws are ISO-class 12.9, which are made 60om
quenched and tempered alloy steel with a minimum proof strength of 970 MPa and a
minimum yield strength of 1 100 MPa. The factor of d e t y guarding against the screws
acquiring a permanent set is:
The stainless steel end-fitting has been designed so that the elbow rnechanism that
it supports can be mounted on the SRC shoulder flange in three distinct configurations.
In the primary (Le. anthropomorphic) configuration, the direction of the eibow's rotation - is aligneci with the principal power axis of the shoulder (Le. the "strong" direction that
produces 3 790 N). In the secondary and tertiaq configurations, the elbow is mounted
perpendicuiar to the principal axis (Le. aiong the shoulder's "weaK7 direction) facing either
Ieft or ~ g h t . Thaî the arm can be assembleci in these three wr@urations confers upon
a Lightarm a tremendous degree of versatility in terms of workspace.
4,14 Design of Main Shafts Again the factors drïving the design of these cornponents were strength and
weight. Although aluminum wouid have been an excellent material for this application, it
unfortunately has poor Wear characteristics when in contact with the hard steel of the
ride rouer bearings. Thus, hollow steel shafts were designed and the geometry of the
part lent itsetf to straightforward, analytïcal stress analysis. Each SM can be treated as a
hollow beam of cirdar cross-section which is fully restrained at either end and loaded at
two points by 1340 Newtons. The bending moment diagram and the variation of moment
dong the beam can be O btained nom a standard text on strength of materials [98].

Figure 4.3 1 : Dimensions of Main S M
Figure 4.3 2 : Beam Anaiysis
where
From the above expressions for the moment variation dong the beam, bending moment
diagrams cm be readily drawn and then summed by applying the principle of
superposition:

Figure 4.33: Surnmation of Bendùig Moment Diagrams

fkom which it is manifest that the Iargest moment acting is 72.7 Nom (at both ends ofthe
shaft). Now, the stress due to bending can be caidated as foiiows:
where
The resulting factor of safety in yield is 1.6.
The shear stress can be obtained by h s t drawing the corresponding shear diagram,
shown in Figure 4.34.
- -
Figure 4.34: Shear Stress Diagram
Accordingly, the shear stress for this thui-wded mernber is @en by the expression [99].
where V is the shear force, Q the first moment of the shaded area shown in the figure
below, 1 the moment of inertia and t the width of the diametrd cut. The centroid of a half
cyhdricd sheil is shown below in Figure 4.3 5 [100].

Figure 4.35: Centroid of Hollow Half-Cyhder
which resuits in a factor of safety of 4.9 against yielding in shear.
Next, we calculate the maximum deflection of the shafts to ascertain that they
remain straight. Flexure of the shaft might impede the smooth mRning of the needle rouer
bearings. Intuitively, the maximum deflection occurs at the midpoint (x = 0.035 m).
Again, by invoking symmetry and the principle of superposition, we can simply calculate
the deflection at x = 0.035 rn due to a single load and then double the result to obtaùi the
total midpoint deflection. R e f b g to Figure 4.32, the deflection of any point x between
points B and C is given by the foliowing expression:
The midpoint deflection due to a single load is thus:

y& = 0.035) = 2.6 x 10"mm
.'. y,, = 2 x y& = 0.035m) = 5.2 x 10"mm
Evidently, the majgmum ddection is so minute that it will not impede the fke running of
the needle bearings.
The two deteminhg factors in choosing a bearing are obvioudy the dimensions
and the load. For Lightarm, it was necessary to seek out small, compact bearings that
were able to withstand large loads. Since the arm moves quite slowly, the mzurimum
speed ratings are irrelevant. Aiso, the total number of cycles that the bearings will
undergo will not iikeIy approach the Fdtgue M t . Nevertheless, since the Lightann
d p u l a t o r is designeci for long s e ~ c e use, it is prudent to select bearings with fatigue
load limits that ex& the maximum load applied to the bearing. The fïrst bearing type
tabulated below is the INA K16X20X10 needle rouer bearing, one of which is located in
each of the three cam plates. Since these bearings are sold without an outer raceway,
aistom-machineci steel raceways were inserted into the aluminum cam plates to protect
the soft aiumimun from the hard steel nedes . The RNA 490 1 needie rder bearings are
slightly iarger and stronger than the K16XZOX10 and corne mounted with outer raceways.
Used in both bottom blocks Ci the upper ann) as welI as in the shodder mechaMsm, the
RNA 4901 is a strong yet compact b&g, fsr superior in that regard to ball beacings, for
example which are strong but bullry. As a matter of fa* there are only Uuee bd
bearhgs used in the Lightarm manipufator, ail ofwhich are SKF Double-Row Angular
Contact Ball Bearings. Aithough these possess a higher fatigue load limit than, say, the
RNA 4901, they also weigh 2.5 times as much. The HKû408 TN drawn cup n e d e rouer
bearings, four of which are used in the shouldefs universal joint, are arnRzingiy strong for
th& size. The dimensions ofthe HK0408 bearings were the limiting factors in the

miniaturization of the shoulder's universal joint. Due to the very thin cup, the tolerances
are criticai. Ifthe fit is too tight, the bearings don? roll properly on the shafls.
Conversely, ifthe fit is too loose the bearings will slip out of their housings. To prevent
slippage, a small amount of Loctite 648 cy1indrica.I bond adhesive (with Primer 7649) can
be applied. Tabulated beIow are data compiIed and condensed fîom numerous bearing
catalogs [10 1-1043, wherein B, D and W represent bore, outer diameter and width.
INA Needie Roiier . Drawn Cup Needle Roller
INA Needle Rouer SKF Double-Row
Angular Contact Baii Tonkgton Needle Rouer
INA Needle Roller
-rand Total 357.9 II
KI 6X20X10 HM0408 TN RNA 490 1
Table 4.17: Breakdown of Bearhg Masses
Table 4.16: Bearing Data
K16X20X10 HKO408 TN RNA 490 1
5201 A
B-44 HIE(O810
4.16 Synthesis of Elbow Cam Mechanism
5.7 1.6 20
The objective in redesigning the elbow rnechanism was to improve the strength-to-
weight ratio while retaining the kinematic parameters of the previous design [l OS]. The
new design includes a radidy smaller cam mechanism, smder bottom blocks 2nd smder
bearings. In the previous design, the hydraulic lines were routed internally which meant
16 4 16
15-9
6.35 8
3 4 8
20 8
24 32
21.11 12 ,
17.1 6.4 260 -
10 8 13 12
6.35 10
893 316 1340 1876
670 1340
1160 1320 1460
10600
145 1 3690
1.3 4.2 1-1 5.7
2.2 2.8

that the w d thickness of the upper arm had to be large. Eiegant as the intemal routing
0 was, the increase in complexïty, machinhg cost and weight proved to be problematic.
Lefl Plat
Dowef Pin - Right Cam Plate
Cam Plate
Figure 4.36: Anatomy of the Etbow Cam Mechanism
Additional weight savings were achieved by replacing the duminum limit-stops
with D e h ones. The four black Delrin stoppers were bonded to the graphitelepoxy
with Loctite 401 (possessing a tensile lap shear strength 22 m a ) and Loctite Primer 770.
To cushion the s m d impact load of the c m mechanism on the four stoppers, smali foam
pads were fixed to the parts of the cam mechanism that corne into contact with the
stoppers. The foam pads were fastened with M3 hex-socket cap screws so that the
thickness of the pads could be adjusted to ensure that both pads contact the stoppers

units and eibow output linkages.
m . - - - -
. . - - _ - Figure 4.38: Components of Bottom Main Actuator Assembly, showing Main Sh&, Bearing Blocks, D e h Spacers, Stainless Steel Inserts and Black Delrin Ml6 Nuts.

I
Figure 4.39: Assembled Elbow Mechanism

Chapter 5
5.1 Design of Forearm The forearm, which links the wrist to the elbow, has to be strong enough to resist
the loads appiied to the arm yet light enough that it does not add unnecessary inertia to the
manipulator. Due to the intricate nature of this component, shown in the figure below,
Muminum 606LT6 is ideai for this application because it is strong, light and easily
a macbined. Since the load at the end-effêctor has been estimateci to be 400 Newtons, the
moment that acts over the lever a m of 0.3 meters (the approximate distance fiom the base
of the foreami to the end-effector) is 120 Newton-meters. In the finite-dernent mode1
shown below, the lefi-most face of the base of the forearm is clamped (i-e. fblly restrained
in qy,z translation and rotation). The cantilevered mode1 provides a worst-case scenario
for the component, assumina inwmectIy that the rest of the a m is perfdy rigid. In
reality, the for- is never cumpletely restrained because any load on the end-effêctor
(e-g. payioad) induces deflections not only in the forearm but also in other elastic
wmponents of the a m . Secondy, the twin actuators of the upper arm can only generate
a maximum moment of 70 Newton-meters. This means that in practice a large load that
inicurs a moment in the foreami that exceeds 70 Newton-meters will cause some
dispiacement of the actuators, in effect overpowe~g the actuators' moment. That the
imposed boundary conditions represent a worst-case scenario has been bdaboured here
because the resulting s a f i fkctors for the for- are rather mimina( and are substantiaily
e lower than the s a f i factors that are typicdy considered prudent, especiaüy for a

component that undergoes repeated loading and for which some degree of material
strength degradation is expected.
- - Figure 5.1 : Forearrn

Figure 5.2: Von Mises Stress Contours on Foreann During Transverse Load
Figures 5.2 and 5.3 show the results of the stress anaiysis of the forearm. Clearly,
the downward load case (shown in Figure 5.3) is more severe than the transverse load
case (sho wn in Figure 5 -2). The maximum deflection of 2.4 1 mm represents nearly a
quarter of the m;ucimum dowable end-eEector static deflection of 1 cm. In terms of
strength, the minimum factor of safety is 1.3.

lZEaLTst 2- B.C, 1,m l*StRESSj, - WN HISES HIN: f,B*E+oI M: 1,9iE+ûS m T I m : 3.- BaCa 1.W IrrIX--f DISPUVEEM - wy; nIN: 0,00~tûû M: 2,4i~+ûû STRESS &RI] RWE OF REFt PcYZT
Mises Stress Contours on Foreann During Downward Load
Since the foream is fàstened to the cam plates of the elbow mechanism, the s m d
M3 screws must witbstand the Ioads induced by the application of 400 Newtons at the
end-effector. The load on each of the six M3 smews can be calcrilated by considering the
following diagram:
1 Figure 5.4: Load Analysis for Forearm's M3 Screws

In shear, the load on each screw is simpiy one-sixth of 400 N, or 66.7 N. Thus, the shear
stress on each M3 screw is given by the load F divided by the minor-diameter area which
for an M3 is 4.47 mm2:
The moment induced by the maximum end load is counterbaianced by the two screws
above the neutral axis and by the two screws below the neutral axis. Obviously, the two
screws that lie on the neutral axis do nothing to counterbaiance the moment created by the
end load because their lever arm is zero. Thus, the tensile (or compressive) force, F,
acting on the four off-axis screws is computed f b m the following moment balance:
(400 N)(03 m) = 4F(0.027 m) (5-2) - F = l t l l N ( 5 3 )
The tende (or compressive) stress can be readily computed using the tensile-stress area
for an M3 screw, 5.03 mm2:
The strength of a steel bolt, screw or stud is determineci by the ISO mechanical property
head marking. In the absence of head markings or appended documentation, it is prudent
to assume that the screws were made fkom the lowest grade steel. However, the M3 W
not available in the ISO 4.6 which ranges fiom M5 to M36. The ISO 4.8 M3 has a
minimm proof strength of 3 10 MPa and a miraimm yield strength of 340 ma, providing
a &or of sâfety of 1.4 against acquiring a permaaent set and a fmor of safety of 1.5
against yielding. Although it is best to err on the side of caution, the M3 screws resemble
the M5 ISO 12.9 screws in both colour aod texture. In d likelihood, the M3 screws are
aIso ISO grade 12.9 with a minimum proof strength of 970 MPa and a minimum yield
strength of 1100 MPa which provide fàctors of d è t y of approximtely 5.
Since each of the four bads of 11 11 Newtons is appiied to the base of the forearrn
over a very s m d area, there is dso a likelihmd of local yielding around the holes. By
invoking St. Venant's Principle [I06], the area around a screw-ioaded hoIe was analyzed

ushg hite-e1ement anafysis. The area around one such hole was analyzed and the stress
contours are shown below.
- RESULTSt 2- B.C, 1,- I,SlR€SSj! - VON HISES MIN* 4,2IE+03 Mt 2,OJE+Oô FR#1E (IF REF: PCIRT STRESS [kpaj
Maximum Stress
Von Mises Stres

The maximum Von Mises stress reaches 203 MPa which af5ords the part a factor
e of safety of 1 -2 against local yielding.
5.2 Design of Wrist Figure 5.7 shows the main components of the forearm and wrist. The four
Animate Systems Incorporated (ASI) valves on the right of the figure regdate-the flow of
hydraulic fluid through their respective manifolds and into the four s m d actuators that are
visible on the wrïst. Shown on the left in Figure 5.8 is the M y assembled wrist and
forearm unit and on the ight is the forearm mounted with the wria's four actuator valves.
Although these valves wntniute a great deal of inertia to the Lightarm manipulator, they
are located on the foream because that minimizes the length of the hydraulic lines ninning
from the valves to the actuators on the wrist. Had the valves been located on the base,
there would have to be Long hydraulic Lines ninning up to the wrist. Not only does this
mate problems routing the lines through the elbow mechanism but it introduces
undesir;ib1e h e dynamics which, in tum, compiicates the control system. Tae kinematic
optunization of the wrist was done by Kurtz [107]. A first hernatic prototype was built
by Habib and Kee [IO81 and the fist My-working prototype was realized by four
undergraduate students, Chevalier et al. [109].

Adapter (above), AS1 manifolds (rnodified), and AS1 hydraulic valves.

-- L
Figure 5 -8: Wrist and Forearm Assembly
5.3 Selection of Gripper or Hand For L i g h t m to perform elementary teIeoperated manipulations, a commercial
gripper would have to be attached to the wrist's output flange. There are many types of
grippers avdable on the market today: pivoting-am grippers, pardei grippers with T-
slots, parallei grippers with rack and pinion, cm-activated pardel grippers, finger
grippers, 3-jaw gïppen, 6-hger grippers, collet grippers, sheet stock grippers, indexers,

toggle-tongs, suction cupq needle grippers, magnetic gnppers, wide-jaw grippers and tube
grippers [I 101. These grippers can be combined with tool ctiangers to d o w the
teleoperator to remotely select and pick different tools during a procedure. Aiso available
are swivel units which codd endow the h s t with a fourth degree of fkeedom to, Say7
perform a rotary task [ I l 1,1121. These accessories aiiow Lightann to p d u m
mdiientary ta& such as manipdating tools. For more intncate operations, a robotic
hand would be necessary. There are numerous aathropomorphic robotic hands currently
on the market. The Hitachi Hand uses shape memory d o y (SMA) actuation but
unfomuiately it has a mere load capatity of 2 kg, weighs 4.5 kg and is 70 cm long. The
UtahIMIT Hand employs a tendon-drive systern involving 288 puiieys. Its length d e s it
&table for Lightarm. The same can be said for the Jameson tendon-driven hand.
Although the Belgrade/USC appears to be the appropriate size, it is only capable of
hoIding a mass of 2.2 kg which is lower than the 10 kg payload envisioned for Lightami.
The Sarcos Hydraulic Hand has a 22.7 kg load capacity as weU as impressive dexterity.
U d o ~ e l y , the Sarcos Hand is too heavy and bullcy and it nins at 3000 psi (20.7 MPa)
whereas Lightann's AS1 actuators operate at only 500 psi (3.45 MPa). The Odetics
Hand is a simple, three-kgered, human-sized hand wkch is powered by electric motors
and solenoids. It possesses rudimentary kinematics that are more akh to a claw or talon
than a hand but the Odetics Hand appears to be a feasible hand for Lightm. Shouid a
more dextrous hand be sought, there are two which were featured in Chapter 2 the
Barrett Hand and the Onmi-Hand. The Bmett Hand weighs only 1.1 kg and is roughly
the i ze of a human hand. Tt consists of a thumb and two fingers, complete with built-in
position and force transducers. But unfortunately, the maximum payload is ody 5 kg
which is halfof what wss origidy prescribed for Lightann. The Ross-KMe Designs
Incorporated Omni-Hand is a tnily human-like hand with a Ioad capacity of 25 pou&
(1 1.4 kg) which is ideaf for Liphtarm's expected m;urimum payload of 10 kg. Omni-Hand,
wkich is controlled by electric savos and even feahires tactile sensors in the fingers and
pairr~, represents the state of the art in robotic hands.

Chapter 6
Synthesis of Lightarm
6.1 Final Assembly Shown in Figure 6.1 are front and side views of the fûily assembled Lightarm. In
Figure 6.2 are three addih'onal views of Lightam, showing the slot in the box-beam and
the elbow b a t to its maximum angle. Each major mechanism, namely the shodder,
elbow, and wrist, is moddar snd can be rapidly assembled and disassembled which is
highiy advantageous for maintenance and repair. Simitarly, each actuator/valve is a
modula mit which can also be easily replaced.
Although the wires and hydraulic lines have not yet been fuly integrated, the
elbow, forearm and shodder were careMy designesi to accommodate these wires and
lines. The hydraulic lines for the elbow and wrist wiU be routed through the holes in the
SRC flange and the stainless steel end-fitting and will be f i e d to the inner wall of the
gniphitdepoxy box-beam. A fidl centimeter of clearance has been left expressly for this
purpose. As shown in Figure 6.1, the black Delrin cap on top of the graphitekpoxy box-
beam was modined to fit the slot and bonded with Loctite 401 and Primer 770. The
Delrin inside the dot acts as a bumper for the foreann when the elbow joint is fully
contmcted, as shown in Figure 6.2, and thus prevents damage to the top edge of the
graphitdepoxy box-beam.

Figure 6.1 : Front and Side Views of Lightarm

Figure 6.2: Views of Lightann

6.2 Evaluation of Mass and Inertia Tabulated beiow is a breakdown of the masses of each major mechanism. The
total mass of Lightarm (shouider, elbow and wrist/foreann) is currently 5660 g. Ifwe add
to that the mass ofa hand'gripper like Barrett Hand, the total rnass of Lightarm would nse
to 6.76 kg which is considerably Iess than the payload of IO kg. However, the Barrett
Hand cannot grip more than 5 kg so it would be necessary to employ a different (and
possibly a heavier) hand or gripper. For that reason, 2.5 kg is budgeted as a conservative
estimate ofthe mass of such a han& redting in a total of 8.16 kg which is stiU less than
the payload of 10 kg. Even with tht hypothetical2.5 kg hand, the payload-to-weight
ratio would be 1.22: 1 which is superior to the 1 : 1 ratio which was established as a
benchmark for iightweight manipulators by ROTEX The payload-to-weight ratio can
stiu be improved, however. By relocating the wrist 's four AS1 valves to the base, a full 1
kg can be saved. By redesigning the wrist with alunninum instead of brass and steel., at
l e s t 300 g could be economized. Finally, a Iightweight hand capable of lifting 10 kg
could be designed or purchased. Presuming the hand had a mass of 1.5 k g the overali
mass savings would be 2.3 kg. The total mass of Lightarm would therefore be 5 -86 kg,
resulhg in a îruiy remarkable payload-to-weight ratio of 1.7.
I Fo rearm
I I TOTAL (without hmd) 5660 g I Wrist
l I TOTAL (with hand) 8160 g I
1002 g
I I 1
Table 6.1 : Mass Su- l equivalent moving mass of shoulder 2 mass of Barrett Hand

Although the payload-to-weight ratio of the arm is a significant rneasure of the
performance of an a m , a more ngorous approach is to q u a n e the inertia of the arm, or
the distribution of mass with respect to the kinematic origin of the manipulator. For the
sake of simplicity, the kinematic ongin is taken to be at the center of the shoulder
rnechanism's unbersal joint. Using 1-DEAS Master Series 2.1, the inertÏa matrices of the
various links of thé a m assembly were calculated in the X-Y-Z coordinate system show
below. The inertia of the a m changes as the am's posture changes. For the sake of
illustration, the moment of inertia of the a m is calculated for the fùll-extended vertical
posture which is essentidy when the arm is working at a worst possible mechanical
advantage. The payload is assumed to be the maximum 10 kg and the gripper is presumed
to have a mass of 2 kg.
O 7.18 x 106 O 1 kg-mm'
Thus, I== 0.9 kgrn2, In= 7.2 kgm2 and IZ= 8.1 kgm2. The radii ofgyration for each
of the various links can be found in Appendix B. The inertiai results show that the mist
and the forearm (with the four AS1 valves) contnbute greatly to the overd inertia of the
am. In the M y vertical posturc, illustrated in Figure 6.1, the inertia (Iu) of the foreann

96
4
and valves is 1.7 times the inertia of the elbow while Iu, of the wrist is 2.4 times that of the
elbow. Similarly, the hypothetical addition of a gripper and a payload would contribute
an even greater amount of inertia to the m. This is a simple manifestation of the lever
ann effect. In other words, the further a link is f?om the a m ' s kinematic ongin, the more
critical its mass becomes.
,m.- 10 kg Payload
Elbow mechanism
Moving mass of shoulder (1 kg lumped)
universai joint)

5.3 Summary of Stress Analysis The material and safety factor of the most highly-stressed cornponents of Lightam
are summarized in Table 6.2. Wtth these safety factors, the strength-to-weight ratio of
the various components can be considered optimal.
i Box-Beam 1 GraphitdEpoxy 1 2.2 l H-Base
1 Main Elbow Shafts 1 Stainiess Steel 303 1 1.7 1
Stainless Steel 304 1.7
I 1
1 M3 Cap Screws 1 Steel I 5.0 I
Centercube
End-fitting Bond
1 M6 Cap Screws 1 Steel I 3 .O I 1 1 1 1
Table 6.2: Material & Safety Factor Summary of Key Lightarrn Components
Staialess Steel PH
Hysof EA9430
6.4 Recommendaéions for Future Work
1-9
1.4
Ultimately, two Lightarm manipulators will be tele-operated sirnultaneously,
thereby mimicking the fùii dexterity of a two-armed human. The simultaneous control of
two arms has been the subject of much research [113-1181, and, f?om a mechanicd
standpoint, raises the spectre of ami-to-am coiiisions. Analysis of impact loads thus
becornes critical in fiiture two-am designs [ 1 19,1201.
Since the wrist prototype CI091 did not perfonn kincmatidy as well as had been
origindy envisageci, a redesign is inevitable. Yet another alternative is to purchase a
commercially avdable wrist such & the Omni-Wrist or the composite-matenai Barrett
W&. Aside fhm the heavy AS1 hydraulic actuators, the structure that contributes most

- to the inertia of the arm is the wrist since it is constructed predorninantly of brass and
steel both of which have bïgh densities. Thus, the engineers involved with the next w-rïst
iteration should strive to lighten the mechanism dramaticdy. The choice of brass and
steel arose out of a perceived need to find two materials that have very low Wear when in
contact with one another. However, the Wear factor is not alI that important because the
wrist moves at slow speeds. A maidy aiuminum structure would be substantially lighter
and the problem of wear on the bail-and-socket joints could be solved by carefbl
lubrication or by coating the sockets with a wear-resistant compound Wce Tefion.
Plastics or ceramics might even provide better design solutions for the bd-and-socket
joints.
Utirnately, the wrist and forearm should be shrouded to protect the achiators and
valves f k m both impact damage as well as dirt, dust and rain. Although the forearm is
f iciently strong as is, the wiist/forearrn shroud ought to be a stnictural member in order
to take part of the load exerted on the wrist/forearm This would reduce the load imposed
on the forearm and fùnher improve the factor of s a f q which is presently tenuous. The
left and right cam plaies have been tapped for M3X 0.5 screws at two places at the top of
each plate for this purpose. These are the ideal lower attachent points for the shroud
since they are high enough that the shroud wodd not interfere with the graphitdepoxy
box-beam as the foreami pivots about the elbow. On the existing wrist, the shroud's
upper attachment points (also threaded for M3 X 0.5) are located on the structure that
restrains the rocker a m . This is the highest accessible non-moving part of the wrist but,
regrettably, this leaves exposed the slender links that run fiom the rocker arms to the bras
head, an issue which ou@ to be addressed in the next iteration The shroud could be a
fairy simple structure such as a box-beam, for instance, and should be very light. Either
aluminum or graphitdepoxy could be used dthough the cost and effort associated with the
design and fabrication of the laiter rnay not be justifieci for Such a minor part. - -
To m e r reduce the inertia of the arm, it wodd be possible to remove the AS1
valves Çom the foreardwrist and relocate them to the H-Base. This would, however,

introduce iine dynarnics due to the hydraulics and would compiicate the control. Ifthe
control problem could be soived, then hydraulic lines wouid have to be routed through the
shoulder and elbow joints. In such a case, it would be advisabte to retum to the original
design for the box-beam involving the K-inch honeycomb core through which the copper
hydraulic lines codd be routed.
There are three minor improvements that could be made to the graphite/epoxy
box-beam. First of aii, the surface finish (for final production) of the box-beam can be
improved by grinding and honing the inner s d c e of the rnold. Secondly, more detaiied
machining of the mold wodd eliminate the lines that appear at the seams of the mating
part S. Thirdly, the width of the box-beam could be reduced by about i cm. If the
elbow's actuator output linkages and LVDT holders are shortened by about 1 cm, then the
width of the box-beam can be reduced by another 1 cm for a total reduction of 2 cm. The
depth of the box-beam can be reduced oniy ifthe thickness of the Renshape inserts is
reduced. In the extreme, the Renshape codd be omitred (as it was for the tested box-
beam) thereby cutting the depth of the box-bean by half an inch. Although these
reductions in width and depth are by no means cnticd, they would simply render the
elbow more compact, if ever another iteration were to be designed. Although it may be
too cornplex for this particular application, a very intereshg alternative design for a
composite box-beam involving stringers, spars, nbs and cover sheets was presented by
Bicos et al. [121].
6.5 Conclusion A lightweight, a~~thropomorphic robotic a m was designed and fabricated using
aluminum, stainless steel and graphitdepoxy to achieve a payload-to-weight ratio that
exceeds 1 -2 to 1. Dubbed Lightarm, this generai-purpose, seven-degree-of-fieedom,
hydriwlically actuated manip~lato~ consists of îhree principal meîbanisms: a shoulder,
elbow and wrisdforearrn. Each of these three rnechanisms was optimized for strength,
stifniess and low weight using nnite-element analysis. The dnving design criterion for the

LOO
4
a shoulder mechanism was range of motion. By designing a highly compact yet strong
universai joint, the shoulder is able to achieve excelient motion. For the elbow
rnechanism, strength-to-weight ratio was paramount. A 400-gram graphitdepoxy box-
beam houses the elbow's twin actuators. The elbow rnechanism has a mass of only 2.3 kg
which is substantialiy iighter than the previous ahminum prototype. The for- and
wrist were also designed for maximum strength and minimm weight. Together, the
shoulder, elbow and w-rist constitute a liightweight a m with remarkable payload, strength
and stiffness as weii as the manipulability, dexterity and workspace volume approaching
those of a human am,

References
Gordaninejad, F., Azhdari, A, and Chalhoub, N.G., 'Wonlinear Dynamic M o d e h g of a Revolute-Prismatic Flexible Composite-Material Robot Ami", Journal of Vibratio~z a n d A c ~ ~ ~ c s , October 1991, Vol. 113' pp. 461-468. Cannon, RH-, and Schmidt, E., '?nitid Experiments on the End-Point Control of a Flexible One-Link Robotyy, The International Jm~nal oJJRobotics Resemch, Vol. 3, No. 3, November 1984, pp. 62-75. Usoro, P.B., Nadira, R, and Mahil, S.S., "Control of Lightweight Flexible Manipulators: A Feasibility Study", Proceedings of the 1984 American Control Conference, Vol. 2, San Diego, California, 1984, pp. 12094216. Chahoub, N.G., and Uisoy, AG., "Control of a Flexible Robot Ann: Experimental and Theoreticai Results", ASME Jmrnal of Dynmnic Systems, Memurement, ami Control, Vol. 109, No. 4, December 1987, pp. 299-309. Zducky, A, and Hardt, D.E., "Active Control of Robot Structure Deffectionsy', Robotics Research and Advanced Applications (Edited by W. J. Book), ASME, 1982. Cleghorq W.L., Fenton, RG., and Tabarrok B., ccOptimiun Design of High-Speed Flexible Mechanisms", M e c h i c s and Machine Theory7 Vol. 16, 198 1, pp. 3 99-406. Sunada, W. H., and Dubowsky, S., "On the Dynamic Analysis and Behaviour of Industrial Robotic Manipulators with Elastic Members", ASME J. Mech. Trammiss. Automat. Design, Vol. 105, 1983, pp. 42-51. Thompson, B.S., and Sung, C.K., 'The Design of Robots and Intelligent Manipulators Using Modem Composite Matenals", Mechanim and Machine Theory, Vol. 20, No. 6, 1985, pp. 471-482, Spiteri, C.I., Robotics Technolow, Saunders College Publishing, Montreal, 1990, p. 1 -
10- Poole, H-H, Fundamentals of Robotics Eneineennq, Van Nostrand Reinhold, New York 1989, pp. 12-13.
11- Simons, G., Robots: The Quest for Living Machines, Cassell, London, 1992. 12- Koren, Y., Robotics for Engineers, McGraw-Hill, Montreai, 1985. 13- Rivin, EL, Mechanical Design of Robots, McGraw-W, Montreal, 1988. 14- Rosheim, M.E., Robot Evolution: The Development of Anthrobotics, John Wiley &
Sons, Toronto, 1994. 15- Ashley, S. "'Searching for Land Minesy', Mechanical Engineering, April 1996, pp. 62-
67- 16- Harpel, B.M., Dugan, I.B., Walker, I.D., ~avallaro, J.R., "Analysis of robots for
hazardous environments", Proceedings of the Anmal Reliability and MainfarfarmbiIi9 Symposium, IEEE, Phiiadelphia, Pa., 1997, pp. 1 1 1- 1 16.

17- Spiessberger, S.M., Humer K., Tschegg, E.K., Weber, H.W., Noma, K., Iwasaki, Y., "Mechanical properties of carbon fiber reinforced plastics and their response to a radiation environment", Cryogenzcs, Vol. 3 1, 1997, pp. 13 3- 13 8.
1 8- Unger, S .W., Unger H-M., Bass, RT., "AESOP Robotic A d , Sz~rgicul Ettdoscopy, Vol. 8, 1994, p. 113 1.
19- Eldridge, B., Gruben, K., LaRose, D., Funda, J., Gomory, S., Karidis, J., McVicker, G., Taylor, R, Anderson, J., "A remote center of motion robotic am for computer assisteci surgery", Robotica, Vol. 14, No. 1, 1996, pp. 103-105.
20- Gombert, B., tIimnger, G., PI& G., and Schedl, M., "Modular Concepts for a new generation of light weight robots", Proceedings of the IEEE, 1994, pp. 1507-1 5 14.
21- Hdd, H., "Lightweight CFRP Frame Structures for a ROTEX-derived Manipulator System", Proceedings of the International Symposium for Advmced Muteriias for Lightweight Sfruchrres, Organized by European Space Agency, ESTEC, Noordwijk, The Netherlands, March 1 992, pp. 2 1-27.
22- Titan II Telerobotic Manipulator System Brochure, Schilling Development Inc., Davis, California,
23- Mitsubishi Paint Coating Robot Brochure, Mitsubishi Heavy Industries, Ltd., Tokyo, Japan.
24- hdTS 200A Robot Brochure, MT'S Systems Corporation, Industrial Systems Division, Minneapolis, Minnesota.
25- ASEA Industrial Robot System IRB 612 Brochure, Vasteras, Sweden. 26- Advanced Automation Products, BASE Robots Catalog No. 1 183/5M, Mack
Corporation, Flagsta Arizona. 27- Sarcos Dextrous Arm Brochure, Sarcos Research Company, Salt Lake City, Utah. 28- Spine Robotics Brochure, Molndai, Sweden 29- Barrett Technology Inc. Techaical Data Folder, Cambridge, Massachusetts, 1 993. 30- Ross-Hime Designs Inc. Technical Data Folder, Minneapolis, Minnesota. 3 1- Unimate PUMA 200, 500, 700 Series Robots, Unimation Inc., Danbury, CT 32- T~-566 and T'-586 Industrial Robots, Cincinnati Milacron, Publication No. A-304-1,
Lebanon, Ohio. 33- Robot d'assemblage 4 (2.06 SC- CEM, Bourgoin-Jallieu, France. 34- Intelledex Brochure, Corvallis, OR, 1995. 3 5- Salomonski, N., Shoham, M, Grossman, G., "Light Robot Arm Based on Matable
Structure", C L R P A m k , Vol. 44, No. 1, 1995, pp. 87-90. 36- Xy Y., Brown, B., Aoki, S., Kanade, T., "Mobility and manipulation of a light-weight
space robot", Robotics and Autonomous Systems, VOL 13, 1994, pp. 1 - 12. 3 7- Lee, D.G., Kim, K S ., Kw& Y.K, ''Uanufacturing of a S C m - t y p e direct-drive
robot with graphite fiber epoxy composite matenal", Robotica, Vol. 9, 1991, pp. 219- 229.
38- Lee, D.G., h n g , K. S., Kim, KS., Kwak, Y.K, "Development of the anthropomorphic robot with carton fiber epoxy composite matenals", Composite Stnrctures, Vol. 25, 1993, pp. 313-324.
39- Kim, Y.G., Jeong, KS., Lee, D.G. "Development of the composite third robot arm of the six-axis articuiated robot manipdatof', Composite Sfructures, Vol. 35, 1996, pp. 33 1-342.

a 40- Thompson, B. S ., Sung, C.K., ''The Design of Robots and Intelligent Manipulators Ushg Modem Composite Matenais", Mechanism and Machine Iheory, Vol. 20, No. 6, 1985, pp. 471-482-
4 1- Sung, C.K., Thompson, B. S., "A Methodology for Synthesizing Hi&-Performance Robots Fabricated With Optunally Tailored Composite Laminates", Journal of Mechmisrns, Tranmissions, and Automation in Design, Vol. 1 09, 1 987, p p. 74-86.
42- Chao, L-P., "Optimal Design and Sensitivity Anaiysis of Rexible Robotic Manipulators Fabricated f?om Advanced Composite Materials", Journal of Kbemoplizstic Composite Muteriah, Vol- 8, 1 99 5, pp . 3 46-3 64.
43- Gordaninejad, F., Chalhoub, N.G., Ghazavi, A, Lin, Q., 'Wonlinear Deformation of a Shear-Deformable Laminated Composite-Material Fiexibcible Robot Am", Journal of Mech icu l Design, Vol. 1 14, 1993, pp. 96-102.
44- Ghazavi, A, Gordaninejad, F., Chalhoub, N.G., "Dynamic Analysis of a Composite- Material Flexible Robot Arm", Cornputers & Structures, VOL 49, No. 2, 1993, pp. 3 15-327.
45- Chahoub, N.G, Gordaninejad, F., Lin, Q., Ghazavi, A., "Dynamic Modeling of a Laminated Composite-Material Flexible Robot A m Made of Short BeamsYy, n e InternationaiJmrnaZof Robotics Resemch, Vol. 10, No. 5, 1991, pp. 560-569.
46- Gordaninejad, F., Azhdari, A, Chalhoub, N.G., 'Wonlinear Dynamic Modeling of a Revolute-Pnsmatic Flexible Composite-Material Robot A d , JmrnaI of Vibration a n d d c ~ i ~ c s , Vol. 113, 1991, pp. 461-468.
47- Sung, C.K., Shyl, S.S., "A Composite Laminated Box-Section Beam Design for Obtaining Optimal Elastodynamic Responses of a Flexible Robot Manipulatof', Internatuml Jima1 of Mechanical Science, Vol. 3 2, No. 5, 1990, pp. 39 1-403.
48- Caprino, G., Langella, A, "Optimization of robotic arms made of composite materials for maximum fundamental fkquency", Composite Structures, Vol. 3 1, 1995, pp. 1-8.
49- Ghazavi, A, Gordaninejad, F., "A Cornparison of the Control of a Flexible Robot Ami C onstructed &om Grap hiteEpoxy Versus Alumùium", Cornputers & Structures, Vol. 54,N0.4, 1195, pp.621-632.
50- Gordaninejad, F., Vaidyaraman, S., "Active and Passive Control of a Revolute- Prismatic Flexible Composite-fiteriai Robot Ann", Cornputers & Shwcfures, Vol. 53, NO. 4, 1994, pp. 867-875.
5 1 - Choi, S .-B ., Thompson, B. S., Gandhi, UV., "Modeling and control of a single-link flexible manipuiator featunOg a graphite-epoxy composite arm", Proceedings of the 1990 IEEE IntemationaZ Conference on Robotics and Automafiafion, Vol. 2, pp. 1450- 1455.
52- Wang, L., Chen, C., "On the Numerical Kinematic Analysis of Generd Pardel Robotic Manipulators", E E E Trmuctiom on Roboiics and Automation, Vol. 9, No. 3, June 2993, pp. 272-285.
53- Hayward, V., "Design of a Hydraulic Robot Shoulder Based on a Combinatorial Mechanism", Proceedings of the 3rd International Symposium on Experimental Robotics, BER-3, Kyoto, Japan, 1 993.
54- Kayward, V., cT30~owing some design ideas fkom biological manipulators to design an amficial one", Robots md B i o l ~ ~ c a Z Systems, NATO Series, P. Dario, P Aebisher and G. Sandini (editors), Springer Verlag, 1993, pp. 139- 15 1.

4
55- Kurtz, R, and Hayward, V., "'Multi-goal optimization of a parallel mechanism with
a actuator redundancf, IEEE Transactions on Robotics and Azrtomation, Vol. 8, No. 5, 1992, pp. 644-65 1.
56- Boulet, B., Daneshmend, L.K., Hayward, V., and Nemrï, C., "System Identification and Modehg of a High-Performance Hydraulic Actuator", Eqwerimental Robotics 2, Lecture Notes in Conirol and Infmatztion Sciences, Springer Verlag, 1992.
57- Hollehach, J.M., Hunter, LW., and Ballantyne, J., "A comparative analysis of actuator technologies for robotics", Robotics Review 2, MIT Press, 1991.
58- Boulot, B., Daneshmend, L., Hayward, V., Nemi, C., ''Characterization, Modeling, and Identification of a High-Performance Hydraulic Actuator for Robotics", Technical Report TR-CIM-93-9, McGill Center for Intelligent Machines, March 1993.
59- Advanced Robotic Controller System Manual, Animate S ystems Incorporated (ASI), Salt Lake City, Utah, 199 1.
60- Boulet, B., 'Modehg and Control of a Robotic Joint with In-Parailel Redundant Act~ators'~, Master's Thesis, Dept. of Electrical Engineering, McGill University, McGill University, Montreal, 1992.
61- Boulet, B., Hayward, V., 'Robust Control of a Robot Joint with Hydraulic Actuator Redundancy. Part 1: Theory, Applications and Controller Design", Technical Report TR-CM-93 -6, McGill Center for Intelligent Machines, Montreal, 1 993.
62- Boulet, B., Hayward, V., "Robust Control of a Robot Joint with Hydraulic Actuator Redundancy. Part II: Practical Variations and Experimentation", Technical Report TR-CM-93 -7, McGdi Center for Intelligent Machines, Montreal, 1 993.
63- The Advanced Composites Group, Technical Data Sheet, Tulsa, Oklahoma. 64- Cowper, G R , "The Shear Coefficient in Timoshenko's Beam Theory", ASME
JmrnaI of AppliedMechmtics, Vol. 33, June 1966, pp. 335-340. 65- Madabhusi-Raman, P., Davalos, J., "Static shear correction factor for laminated
rectangular beams", Composites P m B: Engineering, vol. 27, no. 3-4, 1996, pp. 285- 293.
66- Tsai, S., Composites Design, 4h Edition, Think Composites, Dayton, Ohio, 1988, pp. 8-10.
67- Bank, L.C., and Bednarczyk, P.J., " A Beam Theory for Thin-Wailed Composite Beams", Composites Science and Technology, Vol. 32, 1988, pp. 265-277.
68- Ba* L.C., "S hear CoeEcients for Thin- Walled Composite Bearns' ', Composite structures, Vol. 8, 1987, pp. 47-61.
69- Beiluzzi, O., Sciema delle Cosmzioni, I, p. 94, Zanichelli, 1986. 70- Lessard, L., Mechanics of Composite Materials, Course Notes, McGill University,
1995. 71- Eckold, G-, I3esi.m and Manufacture of Composite Structures, McGraw W, 1994. 72- Wang, K-S., Hung, C.-L., Chang, F.-K, 'T3Bearing Failure ofBolted Composite
Joints. Part 1: Experirnental C haract erization", Jwml of Composite Materzds, Vol. 30, NO. 12, 1996, pp. 1284-1313.
73- Wang, H-S., Hung, C.-L., Chang, FX., "earing Failure of Bolted Composite Joints. Part II: Mode1 and Verificationy7, JmmZ of Composite Materials, Vol. 3 O, No. 12,1996, pp. 1359-1399.

4
74- Schulz, K.C., Hietala, H.J., Packman, P.F., "A Statistical Approach to the Analysis of a - u t h a t e Strengths of Bolted Joints in Larninated Composites", Composites Science und TechnoIogy, VOL 56, 1996, pp. 505-517.
75- Persson, E., Eriksson, I., Hammersberg, P., "Propagation of Hole Machuiing Defects in Pin-Loaded Composites Laminates", Jmmd of Composite Maferiak, Vol. 3 1, No. 4, 1997, pp. 383408.
76- Sadat, AB., Chan, W.S., Wang, B.B., "Delamination of CarbonEpoxy Laminate during Drilling Operation", Composite Mutera Technology, AASME PD, D. Hui and T.H. Kozik eds., Vol. 32, 1990, pp. 85-88.
77- Abrate, S ., Walton, D.A, "Machining of Composite Materials, Part r', Composites Mmfac~mng, Vol. 3, No. 2, 1992, pp. 75-83.
78- Jeong, K.S., Lee, D.G., Kwak, Y.K., "Experirnentd investigation of the dynaxnic characteristics of carbon fibre epoxy composite thin beams", Composite Sfmcfwes, VOL 33, NO. 2, 1995, pp. 77-86.
79- Frekote Products Technical Data Sheet, Dexter Corporation Distributor Programs, Seabrook New Hampshire.
80- Tan, S.C., Tsai, S., "Off-Axis Plies Made by Folding", Journal of Reinforced Plastics mtd Composites, Vol. 3, October 1984, pp. 294-299.
8 1- TSB 124 Bonded Honeycomb Sandwich Construction, Hexcel Corporation Technical Report, 1993.
82- Strong, AB., Fundamentais of Com~osites Manufacturuin: Matenais. Methods and Applications, Society of Manufacturing Engineers, Deerbom, Michigan, 1989, p p. 2 17-120.
83- MTS Reference Manuai, Vol. 1-3, MTS Systems Corporation, Minneapolis, Minnesota
84- Cole, RT., Bateh, E.J., and Potter, J., "Fastenen for Composite Stnictures", composïies, VOL 13, No. 3, July 1982, p. 233.
85- Parker, RT., "Mechanical Fastener S election", E n & e e ~ e Materials Handbook, Vol. 1 (Composites), ASM Intemationai, Metals Park, Ohio, 1987, p. 706.
86- Cherry Commercial Fastening Systems, Cherry Division of Textron, I~c., Santa ha, CA
87- Tucker, W.C., Brown, R, and Russell, L., "Corrosion Between a GraphiteRolymer Composite and Metais", Jm of Composite Materiah, Vol. 24, 1990, pp. 90-92.
88- Fontam, N.G., Corrosion Engineering, McGraw W, 1986. 89- Riggs, E.L. and Krupp, W., "Corrosion Principle and Protection", Paper presented at
Technid Symposia for China, Peking, Oct. 1978. 90- Stone, RH, "Dissimilar Materid Separation", Engineering; Materials Handbook, Vol.
1 (Composites), ASM Enternationai, Metals Park, Ohio, 1987, pp. 716-718. 9 1 - Bouraad, J., LcJoining of Laminated Composite Materials yiih Titanium", Master's
Thesis, McGïil University, January 1997. 92- Adam, RD., Harris, LA, %onding of composites to metais", A d s i o n , Vol. 12,
1988, pp. 193-204. . .
93- Lees, W.A, "Stress in bonded jointsy7, Adhesion, Vol. 12, 1988, pp. 141-1 58.


115- Lee, B.H., Lee, C.S.G., "Coliision-Free Motion Planning of Two Robots", IEEE Transactions on Systems, Mm and Cybernetics, 1987, pp. 2 1-32.
116- Basta, RA, Mehrotra, R, Varanasi M R , "Detecting and Avoiding Collisions Between Two Robot Arms in a Common Workplace", Robot ControZ 27zeory and Applicatlcatloons, 1988, pp. 185-192.
1 17- Roach, J. W., Boaz, M.N., "Coordinating the Motions of Robot h s in a Common Workplace", IEEE Journal of Robotics and Automation, October 1987, pp. 43 7-44
1 18- Tam, T. J., Bajczy, AX., Yun, X., "Design of Dynamic Control of Two Cooperating Robot h s : Closed Chain Formulation", Proceedings of IEEE International Conference on Robotics and Automation, 1987, pp. 7- 13.
1 19- Chapnik, B Y., Heppler, G R , Aplevich, J.D., "Controhg the Impact Response of a One-Link Flexible Robotic Ad', IEEE Transactions un Robotics anddutomation, Vol- 9, No. 3, June 1993, pp. 346-351.
120- Lagace, P-A, "Understanding Impact on Composite Structures", Copy of Presentation, Technology Laboratory for Advanced Composites, Department of Aeronautics and Astronautics, MIT, Cambridge, Mass.
121- Bicos, AS., and Springer, G.S., 'Design of a Composite Boxbeam", JmimaI of Composite Mderials, VOL 20, J a n u q 1986, pp. 86-109.

Appendix A
Detail Drawings



1 R E V I S IONS
ZONE 1 REV 1 DESCR l PT l ON 1 DATE 1 APPROVED ,
ALL U N l T S I N INCHES PAR[ OR NOMENCLATURE I IDENTlFYl f f i NO
MATERIAL OR DESCRIPTION
l K M SPECIFICATION NO
1 M N T R A C T NO.
PARTS L IST V N L E R OTHUmlSE SPECIFIED
ASTM A276 DIMENSIONS ARE I N INCHES TOLERANCES ARE: S t a i n l e s s S t e e l Type 403 FRAC1 IONS DEC JMALS ANCLES
: . x x - I O . M X - 4 .802 APPROVALS
DO NOT SCALE DRAWINC DRAWH
'REATMENT I n tcrmed i a t e Tempcr MR Hot F i n i s h e d CHECKEO
' IN ISH LL 125 l SSUED -~-
ilMlLAR TO KT, NT WC WT -
A
DATE
10/9
'
"lLE
TAPERED CENTER CUBE
SlZE
A FSCM Mû. DWG NO.
3
SCALE N/A l s ~ E E ~ 1 OF 1

1 PARTS L lST ASTM A581 uirrss oitcrniisr rprcirica I W I W C l M. 1
S t a i n l e s s Steel 303 - - -
? .m. 4 . 5 - - - .XXX-*.œa = APPROVALS
00 NO1 S U L E DRAW lNG .ORI,w
DATE *lTLE
IRCAIUENT Annea l ed ,,,, M. R O Y 3/24 BRACKET --
F I N ~ ~ , - L , Lessord SIZC (FSW HO lm M.



M3 X .5 cBORE A l i g n w i t h Dwg. 2
ZONE 1 REV DESCR I PT ION 1 DATE
PART CR NWENCLATURE MATER I AL l TEH I D E N T I f ï I N C NO OR DESCR I P I ION S P E C l F l C A T l f f l NO
1 PARTS t l ST ASTM A581
2,oo C A l l U n i t s i n lnches
1 . . . . - . -
FRACTIONS DEC I W L S ANGLES 2 .xx- .O1 *
.XXX- DO NOT SCALE DRAWING
IREAMNT A n n e a l e d
F I N I S H 125
SlMlLAR '10 5
S t a i n l e s s S t e e l 303 UNLESS OTHEW ISE SPECIF I ED DIMENSIONS ARE I N INCHES TOLERANCES ARE:
CONTRACf NO*
A
APPROVALS
MR i n a m LL 1 SSUED
DATE
10/22
'
'IlTLE
PLATE
WIC NO.
6 512E
A SCALE N/A l s n E E r 1 OF 1
. F S a W.

* I I REVISIONS I I
1 ZONE 1 REV ( DESCRIPTION 1 DATE 1 APPRwED - N . B . A l i g n T h r e a d e d H o l e s w i t h D w g . t*;"
y Thread M3 X .5
- --q - , 1 8
I , 20 t - , 1
7 rm deep (0.27 i nches deep)
A l l U n i t s i n l n c h e s
1
8 a n d 9
PART OR NOMENCLATURE l W T E R 1 AL IDENTIFYINC NO OR DESCR l PT l ON SPEClFlCATlON NO
2 PARTS L IST ASTM A581 UNLESS OTHERW I SE SPECI F I ED CONIRACT DIMENSIONS ARE IN INCHES TOLERANCES ARE; S t a i n l e s s S t e e l 303
1 FRACTIONS DECIMALS ANGLES z .XX-
.XXX-*%OS * APPROVALS 1 DATE TlTLE UV NUI 3LALt VKAWlNb -
TREATMENT - DRAW
MR 10/25 S i d e E x t e n s i o n Piece
FINISH
Anne' 1 e d CHECKED
LL lm NO.


1 A M T r R I M ~ C I F I U T I O W
ASTM A581 UNLESS OTHERWISE SPECl F l ED rrriTcRi& TOLERANCES ARE:
DEC IMALS 1 Sloiniess S t e e l 303
. X - i.1 , X X - t.01 , X X X - î.005 T l ILE
DO NûT SCALE DRAWING IREAM(T
CONICAL SHAFT U-JOINT Annea l ed

N.B. A l i g n H o l e s w i t h Dwg. 7
8 i l s
UNLESS OTHERWISE SPECIFIED TOLERANCES ARE:
DO NO1 SCALE DRAWING T R E A r n Annea l ed
''lx A LUITmIM rPEEWlUTllW
ASTM A581 WTCRIAL
S t a i n l e s s S t e e l 303
Tl lLE
BOTTOM SHAFT U-JOINT




m w a x- O 3 c r n
m - .- Q) -= E 4- ' -
O *r Q)
r n U L .-- 0 2 3 k








UJIlPllON I SPCCIT ICAlIP1
i L I S T ASTM AS81 MICIIN
S t a i n l e s s S t e e l 303
COL LAR l NSERT


1 F X U PART W HOUCHCLATiRC l UTERlAL 011 RE@ MO IOCNtlFYlNl i M) OR M X I ) I P T l d n SPECIr ICATID( I
7 PARTS L IST
A41 1 s M ~ ~ N / A /UN I T S : MM HEE ET 1 OF 1

D r i l l c l e o r a n c e f o r M5 i n 3 p l a c e s
1 Thread M5 X 0 . 8 20 mm dee ( 3 p ~ o c e s P
* .MX.* 0 1 xxx-i.005
w NOT 'SCALE DRAWIHC DRAw
APPROVALS DATE r''L'
lRfAlUEN1 - None M , R o y 3/14
LARGE MOLD PLATE - FIHISU
125 L e n s o r d SIX ~ S Q I W. ait M.
SlUllAR I O A4 26


- O'OP O ' Ç L



Appendix B: Radii of Gyration
Lfa link has a mass m and a moment of inertia 1 about an mis, then the radius of
gyration k about that same axis is defined as follows:
S houlder Elbow
Foream
N.B. All radii are in mm.
Wrist Hand/Gripper
27 277 492 642 716
9 52 25
27 274 492
1 1 32
642 726

Appendix C : Budget
The bulk of the cost of the Lightarm project was due to machining, wbich was
done at McGïU in both the Department of Mechanical Engineering and the Physics
Department and at Progressive Machine Works in Anjou. Given that the hourly rate at
McGill is $35 and at PMW $65 (where the graphitdepoxy was machined), it is possible to
estimate the machining time of the various components of Lightarm.
I Steel Supports I $150.00 I 1 Stainless Steel H-Base & Plate 1 $2000.70 1
Stadess Steel Shafts & Bushings $245.00
Adapter & Sleeves
U-Joint & Centercube
$1 15.00
$1260-00 !
1 Forearm & Conical Shaft Modifications 1 $1015.00 I
Elbow Piston Output Linkages P O L )
LVDT Holders
Bearing S b & Modifications to EPOL
$135.00
$3 77.50
$505.00
l Aluminum Mold l $630.00 I
Cam Plates
Stainless Steel End-fitting
1 Drilling Holes in Graphite Box-Beam 1 $ISO.OO I
$580.00
$600.00
Milling Slot in Graphite Box-Beam $68.3 8
TOTAL 1
$783 1-58

Appendix D: Corrosion of Graphite with
Various Metals
ANODIC (most active)
3- Magnesium alloys
zinc Alclad 7000-series duminum doys
5000-series aluminurn d o ys 7000-senes aluminum alloys
Pure aluminum and alclad 2000-series aiioys Cadmium
2000-series alumùium alloys Steel and iron
Lead Chromium
Brass and bronze alIoys Copper
Precipitation-Hardened Stainless Steel Martensitic Stainless Steel
Ferritic Stainless Steel Austenitic Stainless Steel
TitaLzium Silver
Gold Graphite
3- CATHODIC (least active)
. .
Adapted fkom Ref. [89]

IMAGE EVALUATION TEST TARGET (QA-3)
APPLIED IIVZAGE . lnc - = 1653 East Main Street - -. - - Rochester, NY 14609 USA -- -- - - Phone: 71 6/482-0300 -- -- - - FU: 71 6/288-5989
0 1993. Applied Image. Inc.. Ail Rights Reserved