Deriving intrinsic images from image sequences. Yair Weiss, 2001 6.899 Presentation by Leonid...
14
Deriving intrinsic images from image sequences. Yair Weiss, 2001 6.899 Presentation by Leonid Taycher
-
Upload
william-banks -
Category
Documents
-
view
214 -
download
0
Transcript of Deriving intrinsic images from image sequences. Yair Weiss, 2001 6.899 Presentation by Leonid...

Deriving intrinsic images from image sequences. Yair Weiss, 2001
6.899 Presentation byLeonid Taycher

6.899 Presentation 2
Objective
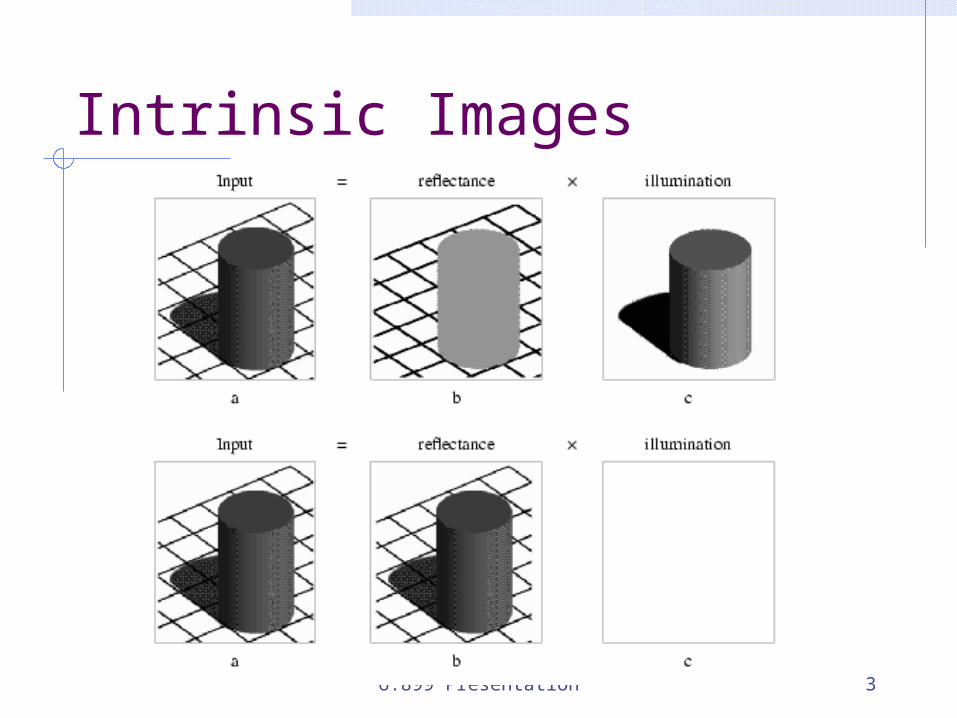
Recover intrinsic images from multiple observations.Intrinsic images
•reflectance R(x, y)•illumination L(x,y)
I(x,y)=L(x,y)R(x,y)
6.899 Presentation 3
Intrinsic Images

6.899 Presentation 4
Ill-Posed problem
Single image: I(x,y) = L(x,y)R(x,y)N equations and 2N unknowns
Trivial solution: R=1, L=I
Multiple images: I(x,y,t) = L(x,y,t)R(x,y)N equations and N+1 unknowns
Trivial solution: R=1, L(t)=I(t)
6.899 Presentation 5
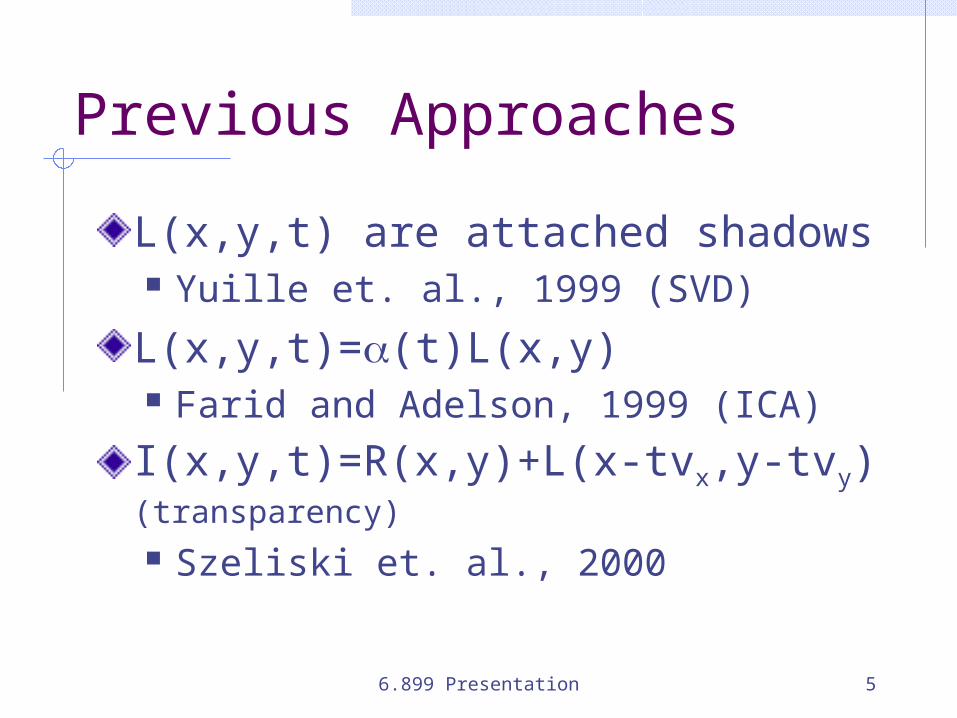
Previous Approaches
L(x,y,t) are attached shadows Yuille et. al., 1999 (SVD)
L(x,y,t)=(t)L(x,y) Farid and Adelson, 1999 (ICA)
I(x,y,t)=R(x,y)+L(x-tvx,y-tvy) (transparency) Szeliski et. al., 2000

6.899 Presentation 6
Main Assumption
Large illumination variations are sparse, and can be approximated by a Laplacian distribution (even in the log domain).

6.899 Presentation 7
Real main assumption
The illumination variations are Laplacian distributed in both space and time.
6.899 Presentation 8
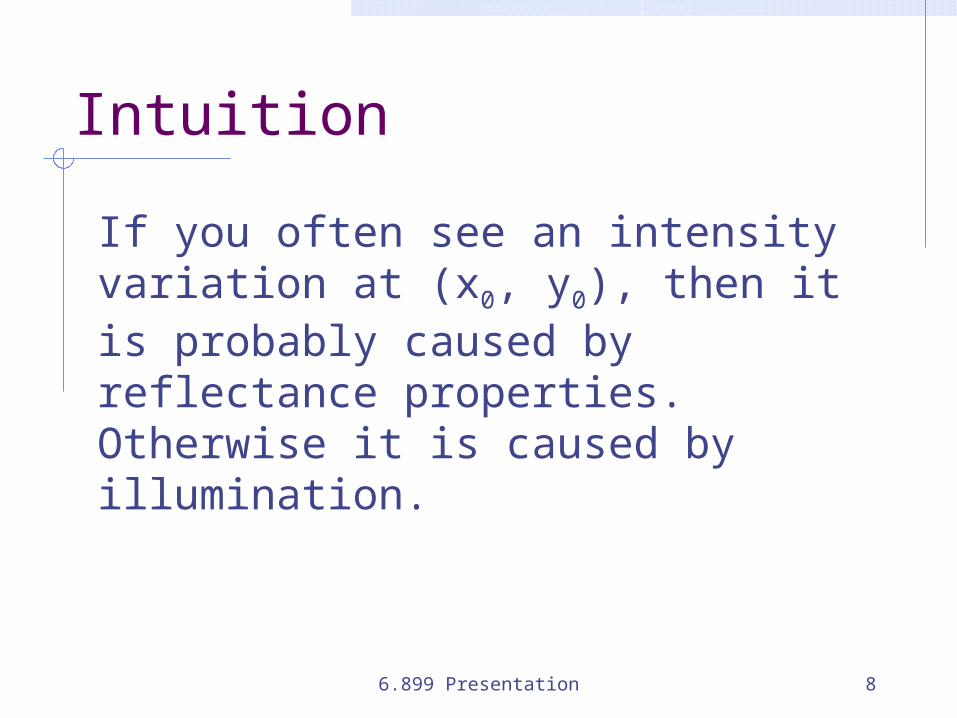
Intuition
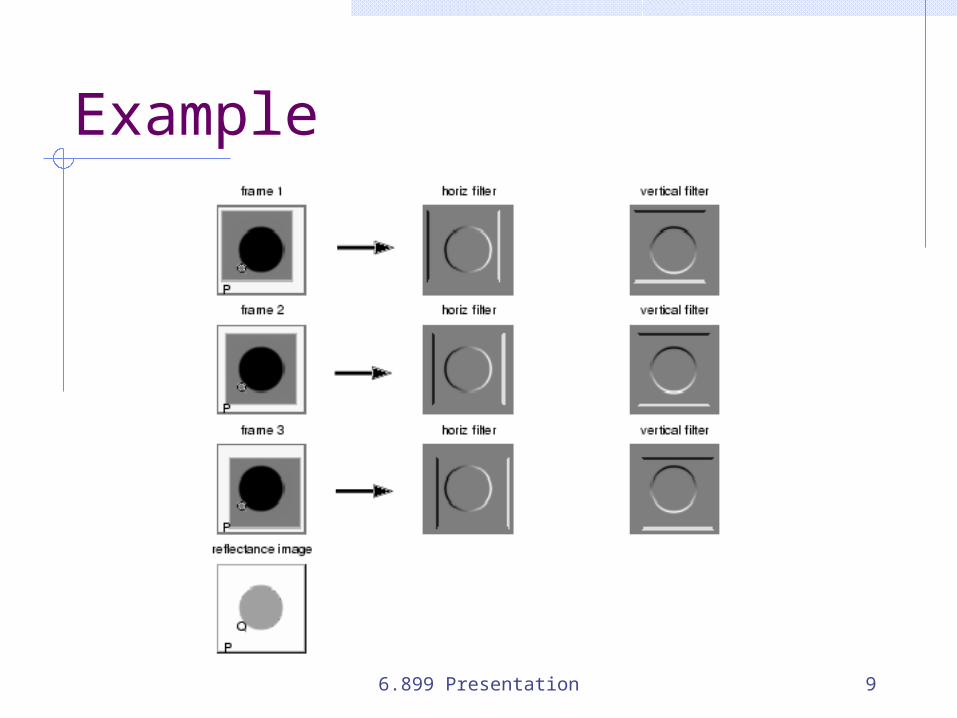
If you often see an intensity variation at (x0, y0), then it is probably caused by reflectance properties. Otherwise it is caused by illumination.
6.899 Presentation 9
Example

6.899 Presentation 10
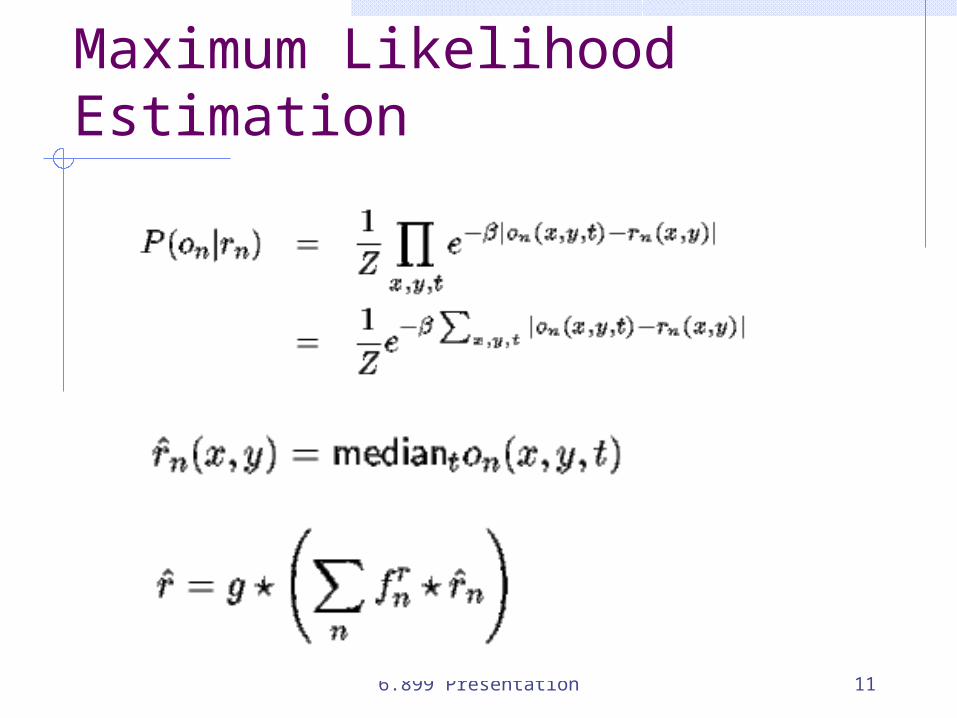
Maximum Likelihood Estimation
In log domain i(x,y,t)=r(x,y)+l(x,y,t)Assuming filters {fn}
on(x,y,t)=i(x,y,t)*fn
rn(x,y)=r(x,y)*fn
Assuming that l_n(x,y,t)=l(x,y,t)*f_n are Laplacian distributed in time and space…
6.899 Presentation 11
Maximum Likelihood Estimation

6.899 Presentation 12
Results

6.899 Presentation 13
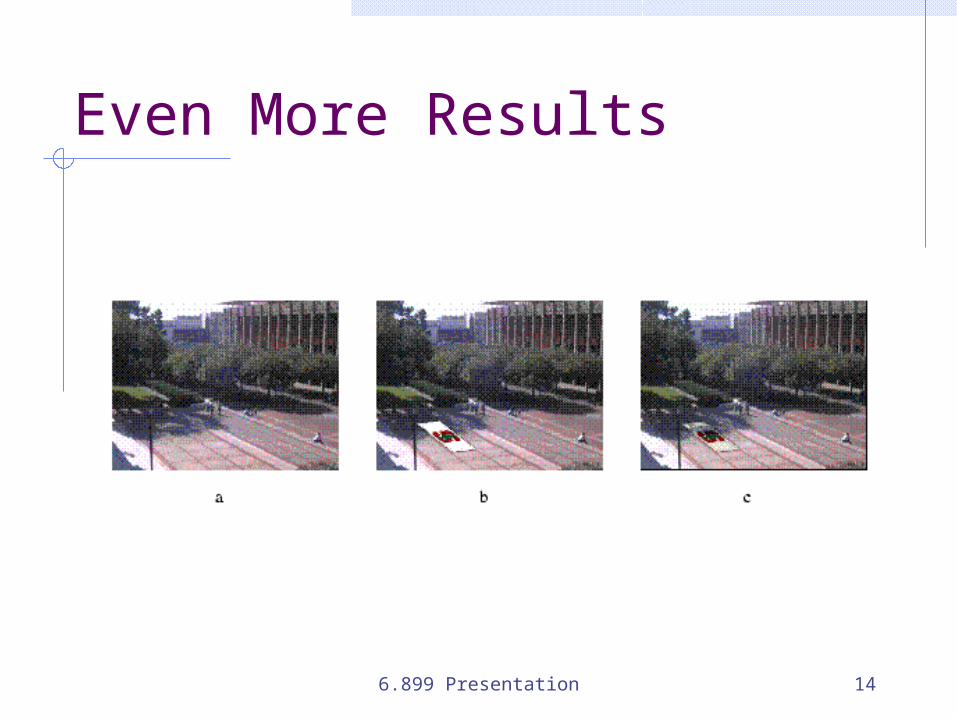
More Results
6.899 Presentation 14
Even More Results