DEIMOS Engenharia - ICATTtrajectory.estec.esa.int/Astro/2nd-astro-workshop-presentations/021... ·...
22
-1- 2 nd European Workshop on Astrodynamic Tools and Techniques ESTEC, Noordwijk, 13-15 September 2004 © 2004 DEIMOS Engenharia S.A. – www.deimos.com.pt DEIMOS Engenharia – PLANAV Image-based Navigation for Planetary Landers PLANAV Image-based Navigation for Planetary Landers Nuno Avila Martins Dr Miguel Belló Mora Deimos Engenharia S.A.
Transcript of DEIMOS Engenharia - ICATTtrajectory.estec.esa.int/Astro/2nd-astro-workshop-presentations/021... ·...
- 1 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
PLANAVImage-based Navigation for
Planetary Landers
Nuno Avila MartinsDr Miguel Belló MoraDeimos Engenharia S.A.
- 2 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• The Image-based Navigation for Planetary Lander (PLANAV) is a software tool with the following options:– Calculation and Visualisation of the Lander Optical System
image opportunity (characterisation of lander cameras)– Covariance Analysis and Monte Carlo simulation of the
expected landing location accuracy– Estimation of the Lander Location by using two methods:
• Navigation Filter (SRIF)• Two-cone intersection single point solution
– Estimation of Lander Attitude– Visualisation of Lander position dispersion error ellipse on
planetary maps• PLANAV has been developed by Deimos Engenharia
under contract with ESA/ESTEC

- 3 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Overview of PLANAV architecture

- 4 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Physical World Modelling
– Constants of Solar System (Sun, planets and most important natural moons)
– Planetary (Mars, Phobos and Deimos for Beagle 2) Rotational and Shape models
– Planets and Moons Ephemeris
– Planetary Topography model
– Planetary Gravitational model
– Planetary Atmospheric models
– Star Catalogue
– Reference Coordinate Systems
- 5 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
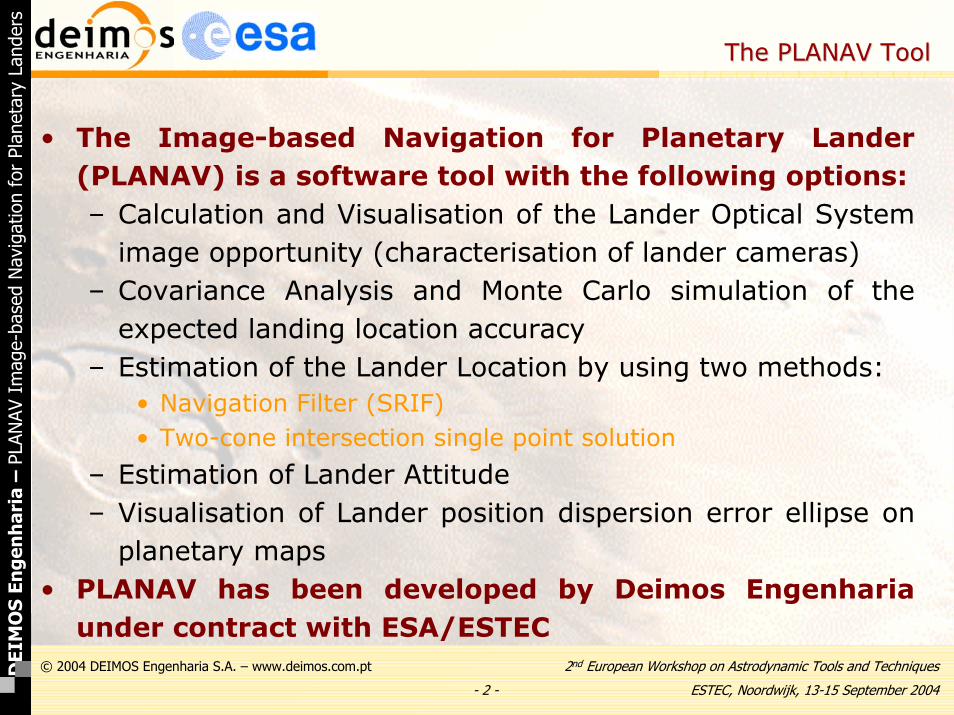
• Phobos and Deimos Physical Models– An ellipsoidal model is selected for the shape of Phobos
and Demos:
• Phobos: 13.3 x 11.1 x 9.3 km
• Deimos: 7.5 x 6.2 x 5.4 km

- 6 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Mars Topography– European MCD Mars atmosphere based on MOLA (Mars
Orbiter Laser Altimetry)
- 7 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Image Opportunity Calculation
– The user selects a planet or moon as central body and a nominal landing position on the surface
– The tool scans over several user-defined time periods for navigation images where a set of selected targets bodies are in the FOV of the left and/or right camera
– A full camera optical model has been implemented to completely simulate the signal (digital number, SNR) of each pixel within the cameras
– Two different sets of filters (left/right) are implemented
– Sun elevation and eclipse conditions are checked
- 8 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Optical System Model
– A number of factors jointly contribute to degrade the signal from objects and targets reaching the sensor
• Atmospheric condition (spectral optical depth)
• Optical system properties (f, f#, exposure time, …)
• CCD performance (pixel size, noises, CCD quantum efficiency)
– A full optical system model has been implemented to completely simulate the images actually seen by the camera. It includes:
• Radiometric Model
• Optical System Model (including atmospheric absorption)
• Sensor Model
- 9 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
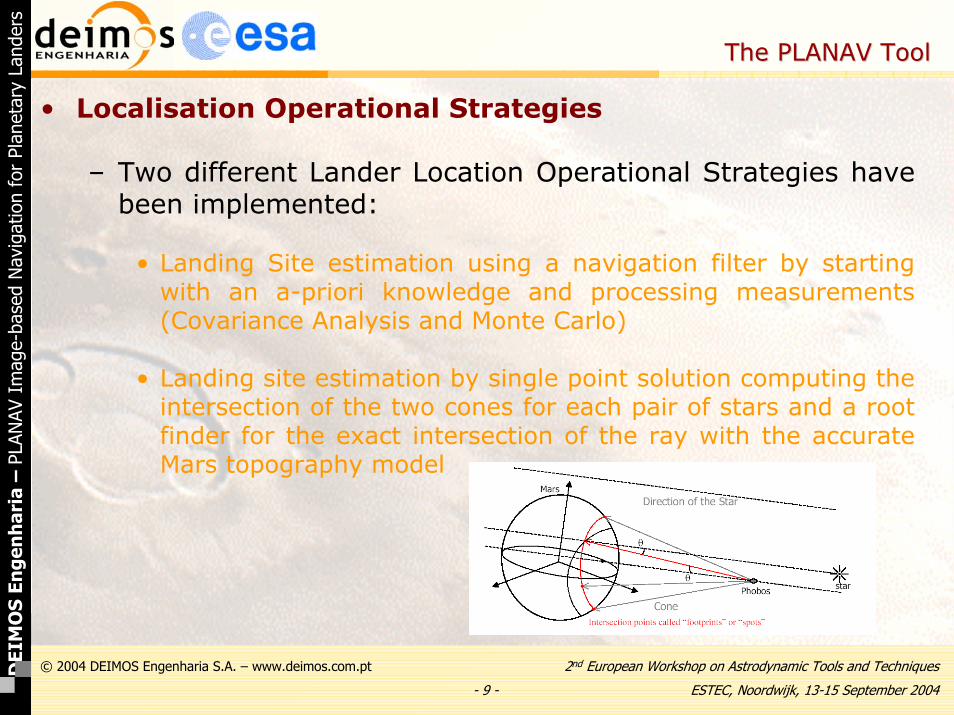
• Localisation Operational Strategies
– Two different Lander Location Operational Strategies have been implemented:
• Landing Site estimation using a navigation filter by starting with an a-priori knowledge and processing measurements (Covariance Analysis and Monte Carlo)
• Landing site estimation by single point solution computing the intersection of the two cones for each pair of stars and a root finder for the exact intersection of the ray with the accurate Mars topography model
- 10 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
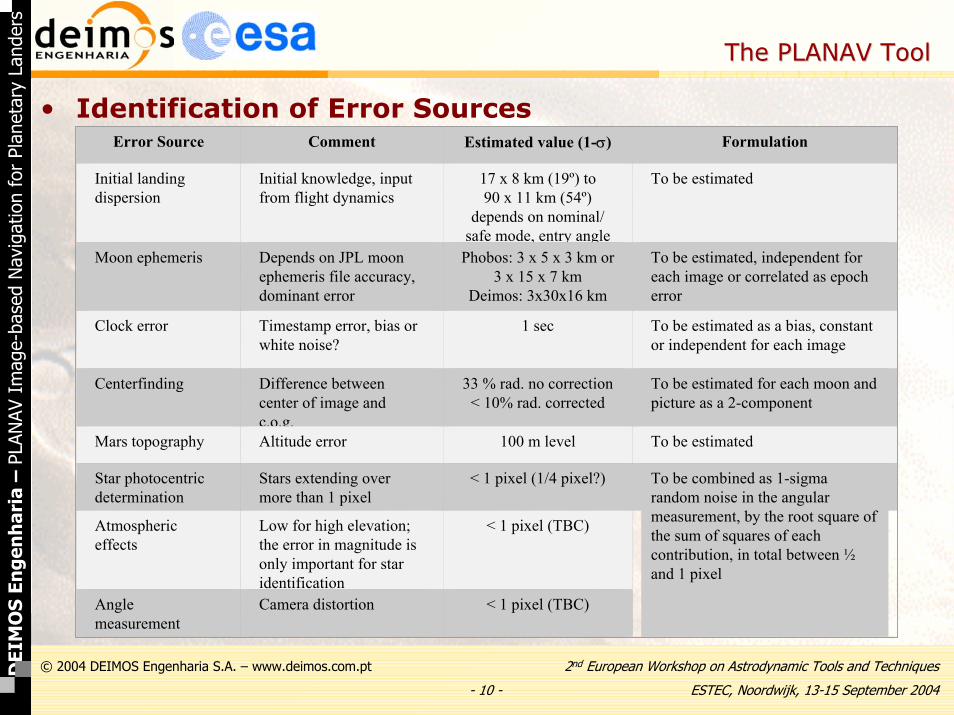
• Identification of Error SourcesError Source Comment Estimated value (1-σ) Formulation
Initial landing dispersion
Initial knowledge, input from flight dynamics
17 x 8 km (19º) to90 x 11 km (54º)
depends on nominal/safe mode, entry angle
To be estimated
Moon ephemeris Depends on JPL moon ephemeris file accuracy,dominant error
Phobos: 3 x 5 x 3 km or3 x 15 x 7 km
Deimos: 3x30x16 km
To be estimated, independent for each image or correlated as epocherror
Clock error Timestamp error, bias or white noise?
1 sec To be estimated as a bias, constant or independent for each image
Centerfinding Difference between center of image andc.o.g.
33 % rad. no correction< 10% rad. corrected
To be estimated for each moon and picture as a 2-component
Mars topography Altitude error 100 m level To be estimated
Star photocentricdetermination
Stars extending overmore than 1 pixel
< 1 pixel (1/4 pixel?) To be combined as 1-sigmarandom noise in the angularmeasurement, by the root square of the sum of squares of each contribution, in total between ½and 1 pixel
Atmospheric effects
Low for high elevation;the error in magnitude is only important for star identification
< 1 pixel (TBC)
Angle measurement
Camera distortion < 1 pixel (TBC)
- 11 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
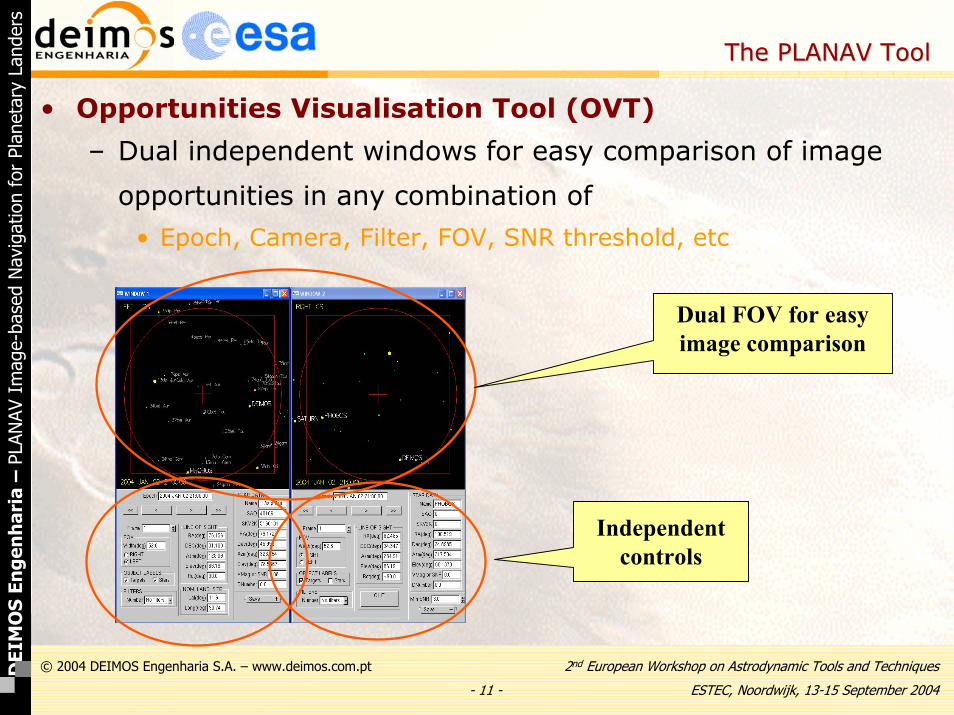
• Opportunities Visualisation Tool (OVT)
– Dual independent windows for easy comparison of image
opportunities in any combination of
• Epoch, Camera, Filter, FOV, SNR threshold, etc
Dual FOV for easy image comparison
Independent controls

- 12 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• OVT. Control and Display Panel
Image browser
Star data display on mouse clickFOV Zoom &
Camera selection
Object labels on/off
Filter selection
SNR threshold
LOS (Local coordinates)
Nominal Landing Site display
- only Window 1 -
LOS (Earth Coordinates.)
Image browser
Star data display on mouse clickFOV Zoom &
Camera selection
Object labels on/off
Filter selection
SNR threshold selection
LOS (Local coordinates)
Nominal Landing Site display
- only Window 1 -
LOS (Earth Coordinates.)
*.TIFF picture saveQuit application
Image browser
Star data display on mouse clickFOV Zoom &
Camera selection
Object labels on/off
Filter selection
SNR threshold
LOS (Local coordinates)
Nominal Landing Site display
- only Window 1 -
LOS (Earth Coordinates.)
Image browser
Star data display on mouse clickFOV Zoom &
Camera selection
Object labels on/off
Filter selection
SNR threshold selection
LOS (Local coordinates)
Nominal Landing Site display
- only Window 1 -
LOS (Earth Coordinates.)
*.TIFF picture saveQuit application

- 13 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• OVT. Sky Plotting Window

- 14 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Graphical User Interface
1. EditingInput Files
3. Viewing Output Files
2. Running Programs
1. EditingInput Files1. EditingInput FilesScrolling
Files
ResizingFrames
Choosing Applications
CurrentApplication

- 15 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
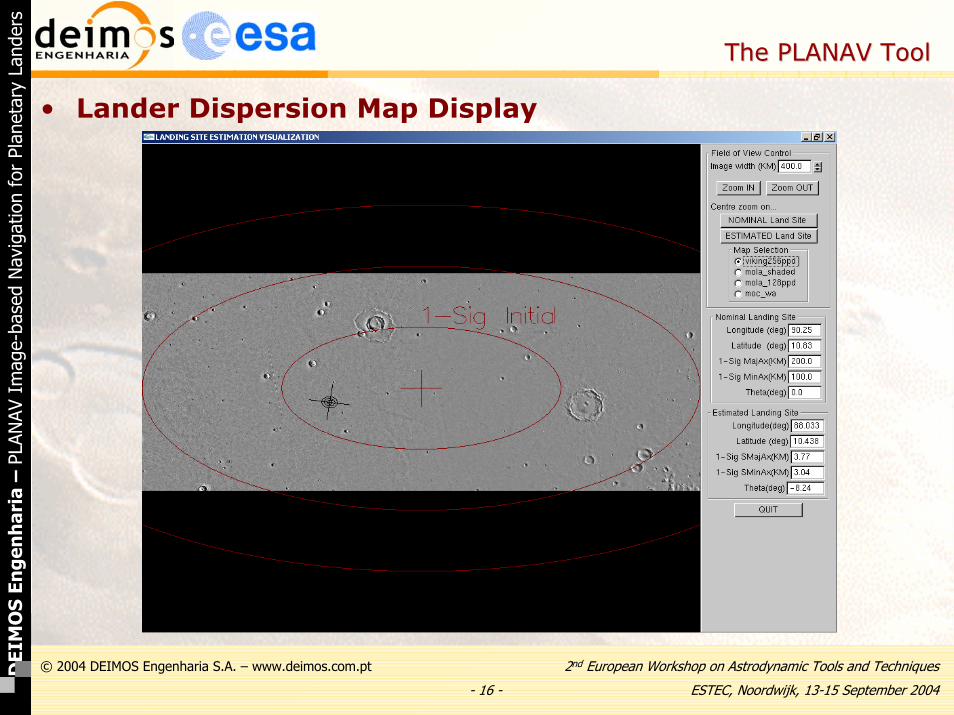
• Lander Dispersion Map Display
- 16 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
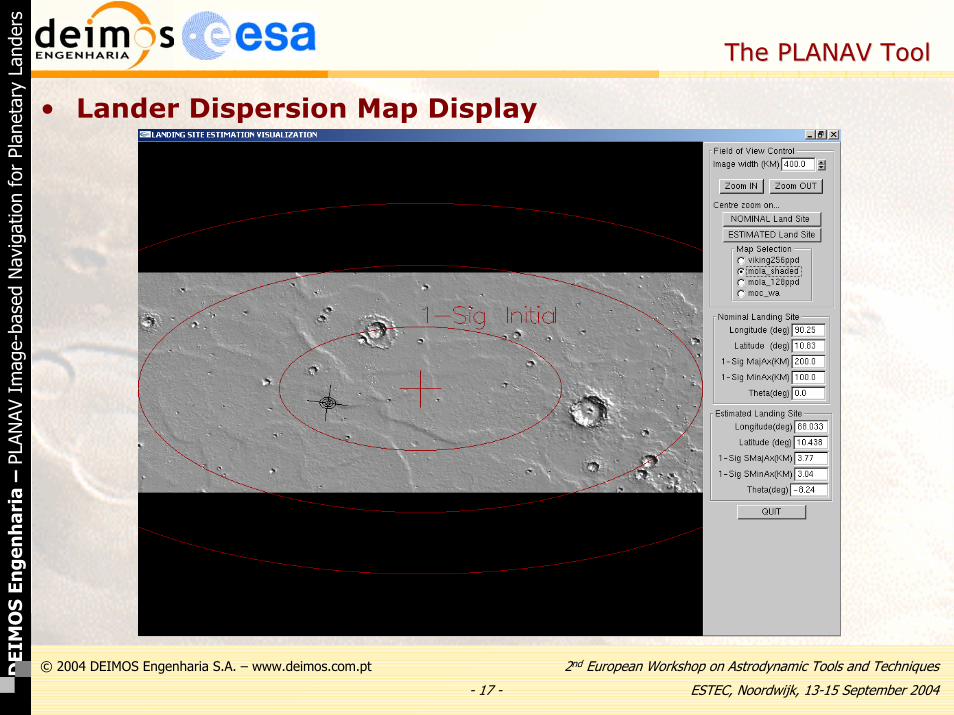
• Lander Dispersion Map Display
- 17 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Lander Dispersion Map Display

- 18 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
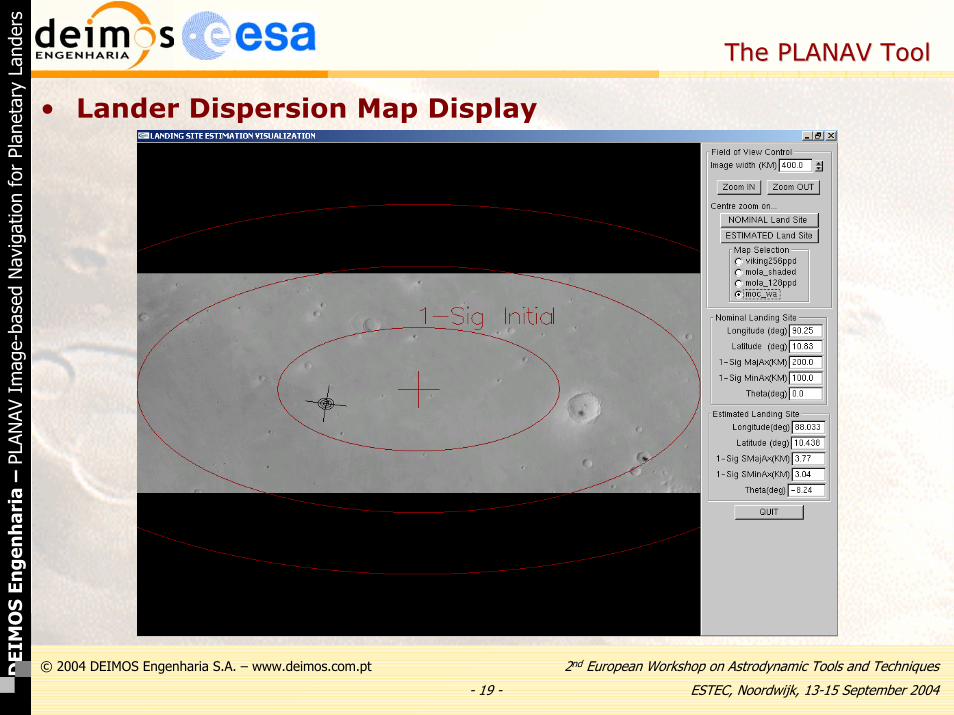
• Lander Dispersion Map Display
- 19 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Lander Dispersion Map Display

- 20 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
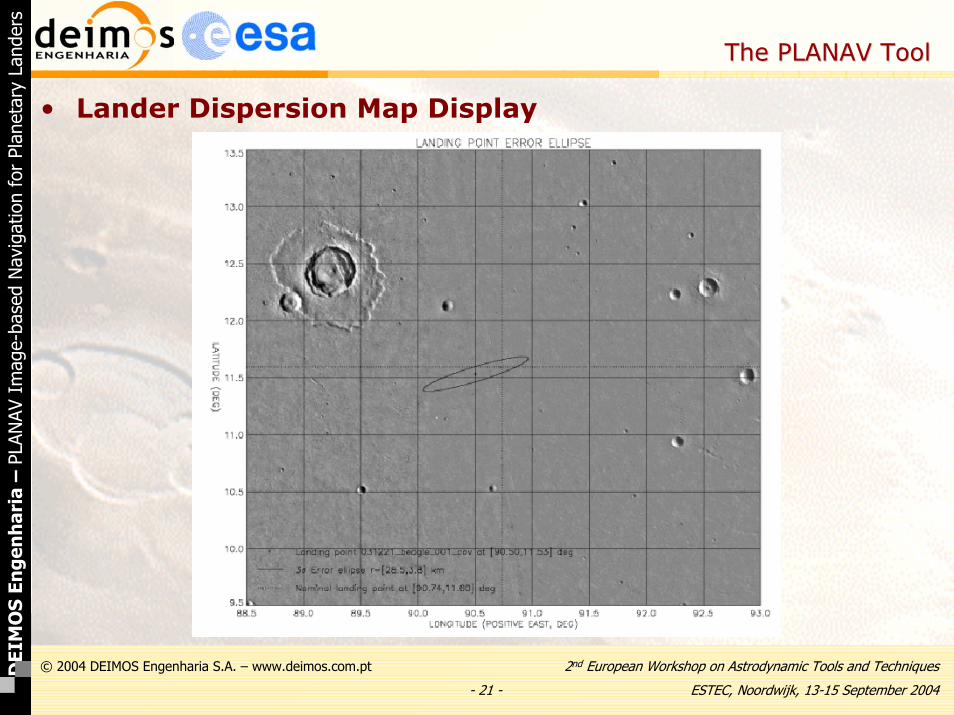
• Lander Dispersion Map Display
- 21 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
The PLANAV ToolThe PLANAV Tool
• Lander Dispersion Map Display
- 22 -
2nd European Workshop on Astrodynamic Tools and Techniques
ESTEC, Noordwijk, 13-15 September 2004
© 2004 DEIMOS Engenharia S.A. – www.deimos.com.ptDEI
MO
S En
gen
har
ia–
PLAN
AV I
mag
e-ba
sed
Nav
igat
ion
for
Plan
etar
y La
nder
s
ConclusionConclusion
• Summary
– A user friendly, general and flexible software tool for optical navigation of planetary and natural moon landers has been developed
– A sophisticated optical system model is implemented, providing arealistic simulation of the navigation images
– Covariance Analysis, Monte Carlo and Estimation of lander location and attitude angles can be performed using different algorithms (navigation filter and 2-cone single point solution)
– Realistic simulation for Beagle-2 shows an expected accuracy in Mars of about 1 km in position and 0.03º in attitude estimation
– The tool flexibility has been demonstrated with examples for Mars, Europa and Mercury landers