
De auteur Bart Meersman - Ghent University...
81
Transcript of De auteur Bart Meersman - Ghent University...

Faculteit Ingenieurswetenschappen
Vakgroep Elektrische Energie, Systemen en
Automatisering
Academiejaar 2005{2006
De digitaal gestuurde elektrische fiets
Bart Meersman
Promotor: Prof. dr. A. Van den Bossche
Begeleider: ir. Koen De Gussem�e
Scriptie voorgedragen tot het behalen van de graad van
burgerlijk werktuigkundig elektrotechnisch ingenieur
optie: elektrische energietechniek

Dankwoord
Bij deze zou ik graag mijn dank betuigen aan iedereen die me heeft geholpen bij de realisatie
van deze scriptie.
Eerst en vooral zou ik mijn promotor professor A. Van den Bossche willen bedanken. Hij
stond steeds ter beschikking om op al mijn vragen te antwoorden. Ook heeft hij voor mij de
deur geopend van de wondere wereld der vermogenselektronica.
Vervolgens zou ik graag mijn begeleider ir. Koen De Gussem�e willen bedanken. Hij heeft me
naar de andere kant van de tunnel geleid. Tijdens deze tocht heeft hij me veel bijgeleerd en
ge��nspireerd. Het was een leuke en leerrijke tijd.
Tevens wil ik de techniekers van het labo bedanken, zonder hun hulp was dit project niet
mogelijk geweest.
Tevens wil ik de andere mensen van het labo danken. Naast het harde werk dat er werd
verricht, was er ook plaats voor wat plezier. Dit plezier maakte het harde werk lichter.
Verder dank ik ook mijn ouders, mijn vriendin en mijn broer voor hun steun en vertrouwen.
Bart Meersman, 1 juni 2006
i

De auteur en promotor geven de toelating deze scriptie voor consultatie beschikbaar te stellen
en delen ervan te kopi�eren voor persoonlijk gebruik. Elk ander gebruik valt onder de beperkin-
gen van het auteursrecht, in het bijzonder met betrekking tot de verplichting uitdrukkelijk de
bron te vermelden bij het aanhalen van resultaten uit deze scriptie.
The author and promotor give the permission to use this thesis for consultation and to copy
parts of it for personal use. Every other use is subject to the copyright laws, more speci�cally
the source must be extensively speci�ed when using from this thesis.
Gent, Juni 2006
De auteur
Bart Meersman

De digitaal gestuurde elektrische �etsdoor
Bart Meersman
Afstudeerwerk ingediend tot het behalen van de graad van
burgerlijk werktuigkundig elektrotechnisch ingenieur, optie: elektrische energietechniek
Academiejaar 2005-2006
Universiteit Gent
Faculteit Toegepaste Wetenschappen
Promotor: Prof. dr. ir. A. Van den Bossche
Scriptiebegeleider: ir. K. De Gussem�e
Samenvatting
In deze thesis wordt een elektrische aandrijving voor een �ets met een elektrische hulpmo-
tor ontworpen. Deze elektrische aandrijving bestaat uit een universeelmotor, een convertor,
een microprocessor, een �etscomputer waarmee de gebruiker het gewenste hulpkoppel kan
instellen en twee lood-batterijen. De �etscomputer is opgebouwd uit een LCD-display en
drie knoppen. Het geheel wordt aangevuld door Hall-sensoren die gebruikt worden om het
trappen te detecteren.
De gebruikte dc-dc convertor, ontworpen door D. Van de Sype, werd aangepast, berekend en
gebouwd. Deze convertor wordt gestuurd door een microprocessor. Deze digitale sturing is
opgebouwd uit een koppelregeling, een snelheidsbegrenzing en een methode om het trappen
te detecteren.
De aandrijving voldoet aan de Europese wetgeving. Op deze manier wordt er enkel assistentie
geleverd als de �etser meetrapt en als de snelheid van de �ets kleiner dan 25 km/u blijft.
Trefwoorden
elektrische �ets, dc-dcconvertor, digitale sturing.

Digitally Controlled Electrical BicycleBart Meersman
Supervisor(s): A. Van den Bossche, K. De Gussem�e
Abstract| This article discusses the design of a digitally
controlled drive for an electrical bicycle. The electrical drive
consists of a dc-dc converter, a microprocessor and an uni-
versal series motor. The design ful�ls the legal demands.
Keywords| Electrical bicycle, digital control, dc-dc con-
verter
I. Introduction
THE roads are getting fuller and the fuel becomes moreexpensive every day. By using a bicycle, tra�c-jams
are avoided but it requires an e�ort. If the bicycle isequipped with an electrical drive than it doesn't require nomore e�ort. By adding an electrical drive, the bicycle be-comes an attractive alternative method of transportation.The electrically assisted bicycle has an universal series mo-tor which is very cheap and has a low weight but has thedisadvantage that it requires an high input voltage. A dc-dc converter is required to transform the battery voltageinto a 0 - 200 V output voltage. The control is implementedusing the microprocessor PIC18F452 [6] manufactured byMicrochip. This article describes the design of a digitallycontrolled electrical drive for a bicycle. In a �rst part theconverter is described. In the second part, the digital con-trol is discussed.
II. The Converter
A. Principle
The topology of the proposed converter is depicted inFig. 1. The proposed converter has a high conversion ratio.The high conversion ratio is realized by using a transformerwith a turns ratio n1 : n2. The use of a transformer hasthe advantage that a low voltage transistor can be used.
��
��
A
−
+
L1 L2
Lσ2
D2
C3
VC3Vs
i1 i2C
B
VL1
VinC1
C2
D1
C4
D5
D4
S1V2 Vd
VC2
VL2
Fig. 1. The schematic of the converter
The converter can be derived from a cascade of two boostconverters. The �rst boost converter consists of the pri-mary winding L1, switch S1, diode D1 and output capaci-tor C2; the components of the second boost converter arethe secondary winding L2, diode D2 and output capacitorC3. The converter will be used as buck-boost converter
to create a variable output voltage 0-200 V. The motor isconnected between clamps A and B.The lossless snubber which is added to reduce switch-
ing losses consists of diode D4, capacitor C4 and diode D5
which is connected with the middle of the secondary wind-ing. The snubber circuit was added for three reasons:1. When switch S1 is switched on, voltage spikes are in-duced due to the leakage inductance in the secondary wind-ing and therefore diode D5 is used to limit these spikes.2. Diode D5 discharges capacitor C4 when switch S1 isswitched on3. Diode D4 diverts the transistor current when switch S1is switched o� (soft turn-o�)
B. Conversion ratio
The conversion ratio of the proposed buck-boost conver-tor is derived in [1] and is given by
Vo
Vin=
D
1�D� (1 +
n2
n1) (1)
with D the duty ratio.
C. E�ciency
The e�ciency was measured. The e�ciency in functionof the output power is depicted in Fig. 2. The averagee�ciency of the converter is 92 %.
0 50 100 150 200 250 30080
82
84
86
88
90
92
94
96
98
100
Output Power (W)
Effi
cien
cy (
%)
Fig. 2. The e�ciency of the converter
III. The Digital Control
A. Objectives
There are three legal demands the electrical bicycle hasto comply with. These legal demands are:

1. There can only be assistance if the cyclist pedals.2. There is assistance up to 25 km/h.3. The motors' output power is limited to 250 W.These three demands were taken into account when devel-oping the drive. A torque control was chosen to be imple-mented. In order to comply with the legal demands, severalaspects needed to be added. The control can be dividedinto three major parts:� The speed limit: When the bicycle reaches 25 km/h, thevoltage is limited so that the torque (current) decreaseswhen the velocity further increases.� Torque control: The torque control is equivalent with acurrent control (T = k � � � I).� Pedal detection: A method was devised to detect howfast and in which direction the cyclist pedals.A bike computer was developed. The assistance can beturned on and o� using the bike computer, the cyclist canchoose between three possible torques which can be chosenusing the bike computer.
B. The Program
The speed limit, the torque control, the pedal detectionand the LCD-display are combined in one program. The ow sheet of the program is depicted in Fig. 3. The pro-gram will be explained using the ow sheet (Fig. 3).The program starts when the supply is switched on. Firstthe di�erent variables and the LCD display are initialised.The program then waits for an interrupt to occur.When the cyclist pedals, an interrupt is generated and theprogram is directed to the Interrupt Pedal routine. Thisroutine �rst checks in which direction the cyclist pedals.This way the motor doesn't start if the cyclist pedals back-wards. Then is checked if the motor already works. Whenthe motor is turned o�, the cyclist has to make two revolu-tions (forwards) before the motor is turned on. The cyclisthas to pedal at least at 30 rpm for the motor to start.When these conditions are ful�lled the variable \MOT" isset high meaning the motor can work. When the motor isalready turned on, the program can continue.Then is checked whether a button on the bike computerhas been pressed. The bike computer can be used to turnthe assistance o� and this results in making the variable\ASS" low. If the variable \ASS" is high, the interruptroutine is exited and the program can continue.When both \MOT" and \ASS" are high, all conditions areful�lled for the motor to start. The Interrupt Motor Con-trol is caused by a timer because the timing of the Motorcontrol routine is important. The Motor control Routine ismade up of two PI-controllers. One for the torque controland one for the speed limit. Each PI-controller results ina duty ratio. The smallest duty ratio is used to drive theswitch.When the Motor control routine is �nished the programreturns to the beginning and the cycle is started again.
IV. Conclusions
The goal was to develop a digitally controlled electricaldrive for a bicycle. The electrical drive consists of a dc-dc
Start
Initialise
yes
no
yes
To RoutineInterrupt Pedal
To RoutineInterrupt button LCD
no
no
yes
yes
noMOT = 1?
ASS = 1?
pressed?Button LCD
pedal?Interrupt
To RoutineMotor controlMotor Control?
Interrupt yesno
Fig. 3. The ow sheet of the motor control
converter which transforms the battery voltage of 24 V intoan variable output voltage 0 V to 200 V at an e�ciency of92%.The control was developed using a microprocessor. Thedigital control o�ers many possibilities and is very compact.The control can easily be extended.Further research and development in digitally controlledelectrical bicycles is necessary. Improvements are possible.
References
[1] David M. Van de Sype, A Single Switch Boost Convertor with aHigh Conversion Ratio, Proc. of the Appl. Power Electr. Conf.,APEC 2005, pp. 1581-1587.
[2] A.P. Van den Bossche, ZVZC DC-DC converter for electricalbike using a 230V series motor, Proc. of the 10th Eur. Conf. onPower Electr. and Applic., EPE 2003.
[3] N. Mohan and T. Undeland and W. Robbins, Power Electronics,Addison-Wesley, 2003.
[4] A.P. Van den Bossche, cursus vermogenselektronica, UniversiteitGent, AJ 2004-2005.
[5] J. Thys, Elektrische �ets voor middellange afstand, UniversiteitGent, 2002.
[6] Microchip, PIC18FXX2 Data Sheet, Microchip, 2002.[7] Analog Devices, Implementing PI controllers with the ADMC401,
Analog Devices, 2000.

Inhoudsopgave
Dankwoord i
Extended abstract iv
1 Inleiding 1
1.1 Probleemstelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Wettelijke vereisten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Doelstellingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Overzicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.5 Bijhorende CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 De Fiets 4
2.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 De motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Algemeen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.2 De gegevens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 De overbrenging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 De batterijen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.1 Hoe werkt een gel accu? . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 De Convertor 9
3.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 Conversieverhouding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3 Praktische waarden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4 Praktische realisatie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4.1 Algemeen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4.2 Transformator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4.3 Vermogengedeelte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.4.4 Hardware beveiliging . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4.5 Signaalgedeelte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.5 Metingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5.1 Continue geleidingsmode . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5.2 Onderbroken geleidingsmode . . . . . . . . . . . . . . . . . . . . . . . 25
3.6 Rendement van de convertor . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
vi

Inhoudsopgave vii
4 De Sturing 29
4.1 Doelstellingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Algemene beschrijving van de digitaal gestuurde buck-boostconvertor . . . . . 30
4.2.1 Opbouw van het systeem . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.2 Binaire voorstelling met vaste komma en tekenbit . . . . . . . . . . . . 31
4.2.3 Digitale regelaar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.4 Digitaal laagdoorlaat�lter . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3 Ontwerp van de regelaars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3.2 Ontwerp van de stroomregelaar . . . . . . . . . . . . . . . . . . . . . . 39
4.3.3 Stabiliteit van de stroomregelaar . . . . . . . . . . . . . . . . . . . . . 42
4.3.4 Ontwerp van de spanningsregelaar . . . . . . . . . . . . . . . . . . . . 43
4.3.5 Stabiliteit van de spanningsregelaar . . . . . . . . . . . . . . . . . . . 44
4.4 Implementatie van de sturing . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4.2 De motorsturing en de PIC18F452 . . . . . . . . . . . . . . . . . . . . 45
5 Implementatie op de �ets 48
5.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2 In- / uitschakelen van de motor i.f.v. de trapfrequentie . . . . . . . . . . . . . 49
5.2.1 Doelstellingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2.2 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2.3 Digitale implementatie . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.3 LCD-display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.3.1 Doelstellingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.3.2 Menustructuur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.3.3 Implementatie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.4 Het volledige programma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.5 Plaatsing van de verschillende componenten . . . . . . . . . . . . . . . . . . . 60
5.6 De digitaal gestuurde elektrische �ets uitgetest . . . . . . . . . . . . . . . . . 62
6 Besluit 63
A Lay-out vermogenprint 65
B Lay-out signaalprint 67
C Lay-out LCD-print 69
Bibliogra�e 71
Lijst van �guren 72

Hoofdstuk 1
Inleiding
1.1 Probleemstelling
Mobiliteit is een belangrijk deel van onze maatschappij. Mensen verplaatsen zich om te
werken, naar school te gaan, om zich te ontspannen enz. De mobiliteit is de laatste jaren
sterk toegenomen en deze trend zal zich zeker en vast verder zetten.
Er is een breed assortiment aan beschikbare transportmiddelen aanwezig: �ets, openbaar ver-
voer, de wagen... Veel mensen verkiezen de wagen om wille van zijn comfort en gebruiksgemak.
Het stijgende aantal wagens en bijgevolg het stijgende �le-leed, maakt het zich verplaatsen
steeds moeilijker. Er zijn steeds meer mensen die steeds langer in de �le staan. Het Belgisch
wegennet is reeds sterk vermaasd en aangezien Belgi�e een dicht bevolkt land is, is verdere
uitbreiding van het wegennet niet meer mogelijk. Naast het �le-probleem zijn er de stijgende
brandstofprijzen. Het wordt steeds duurder om zich met de auto te verplaatsen. De �ets,
eventueel in combinatie met het openbaar vervoer voor het a eggen van langere afstanden,
zou een mogelijke oplossing kunnen bieden op het gestelde probleem. Er wordt steeds minder
tijd gewonnen door de wagen te nemen. De huidige verkeersdrukte beperkt immers de gemid-
delde snelheid van de automobilist. De �etser ondervindt hier minder last van. Hij heeft geen
last van �les en moet op het einde van de rit ook niet zoeken naar een parkeerplaats. Fietsen
vraagt een inspanning en deze inspanning kan voor vele mensen een drempel betekenen. In-
dien er een hulpmotor aan de �ets wordt toegevoegd, zal het minder inspanning vergen om
de �ets te nemen. Met een hulpmotor kan de �ets als alternatief dus nog sterk verbeterd
worden.
1

Hoofdstuk 1. Inleiding 2
1.2 Wettelijke vereisten
Volgens de Europese wetgeving behoort een \elektrische �ets" tot de �etsen. Drie vereisten
zijn daarbij van belang:
1. Er moet sprake zijn van trapbekrachtiging. Dit betekent dat er enkel ondersteuning
wordt geleverd als u zelf meetrapt.
2. Er is ondersteuning tot een snelheid van 25 km/u.
3. Het geleverd mechanisch vermogen is maximaal 250 Watt.
Indien aan deze eisen voldaan is, heb je geen rijbewijs nodig, is er geen leeftijdsgrens en kan
je gewoon op de �etspaden blijven rijden.
1.3 Doelstellingen
In deze thesis wordt een elektrische aandrijving voor een �ets met een elektrische hulpmotor
ontworpen. Deze elektrische aandrijving bestaat uit een universeelmotor, een convertor die
wordt aangestuurd door een microprocessor, een �etscomputer waarmee de gebruiker het
gewenste hulpkoppel kan instellen en twee lood-batterijen. De �etscomputer is opgebouwd
uit een LCD-display en drie knoppen. Het geheel wordt aangevuld door Hall-sensoren die
gebruikt worden om het trappen te detecteren.
Het doel is een kit te bekomen waarmee de gebruiker zijn �ets kan omvormen tot een digitaal
gestuurde elektrische �ets.
1.4 Overzicht
In deze thesis wordt het ontwerp van de digitaal gestuurde elektrische �ets behandeld.
In Hoofdstuk 2 wordt de mechanische zijde bekeken. Het mechanisch ontwerp werd reeds in
een vorige thesis ontworpen, zie [1]. In dit hoofdstuk worden kort de belangrijkste punten
hieruit besproken.
Het ontwerp van de aandrijving werd in verschillende stappen uitgevoerd. Elke stap in het
ontwerp wordt behandeld in een hoofdstuk.
In hoofdstuk 3 wordt de convertor besproken. Deze convertor werd ontworpen door D. Van

Hoofdstuk 1. Inleiding 3
de Sype, zie [2]. Een circuit werd toegevoegd om de schakelverliezen te beperken en zo het
rendement te verbeteren. De waarden van de verschillende componenten werden bepaald en
de convertor werd gebouwd.
In hoofdstuk 4 wordt de sturing van de elektrische aandrijving besproken. Het is een digitale
sturing die ge��mplementeerd zal worden. De microprocessor PIC18F452 werd gekozen om de
sturing te verzorgen. Deze microprocessor van de �rma Microchip is vrij goedkoop1 en biedt
voldoende mogelijkheden om de sturing te verzorgen. Hij heeft voldoende A/D2-kanalen,
timers en heeft ook de mogelijkheid om een PWM3-signaal uit te sturen. De microprocessor
wordt geprogrammeerd in Assembler.
In hoofdstuk 5 wordt beschreven hoe de trapdetectie werkt, hoe de �etscomputer aangestuurd
wordt en hoe alles in elkaar verweven wordt. In dit hoofdstuk wordt tevens het volledige
programma besproken.
1.5 Bijhorende CD
Bij dit werk vindt u een CD die de elektronische versie van deze tekst bevat. Daarnaast
bevat de bijhorende CD het programma dat de sturing van de convertor verzorgt. De CD
bevat verscheidene andere programma's die geschreven zijn om bepaalde onderdelen te testen.
Meer informatie wordt op de CD zelf gevonden. Naast de programma's bevat de CD ook de
schema's en de lay-outs die in Eagle getekend zijn.
1Een PIC18F452 is reeds voor 6.47 euro te verkrijgen.2A/D staat voor Analoog naar Digitaal3PWM staat voor Pulse Width Modulation of pulswijdtemodulatie

Hoofdstuk 2
De Fiets
2.1 Inleiding
Deze thesis heeft tot doel een elektrische aandrijving te ontwerpen zonder het mechanische
ontwerp aan te passen. Desalniettemin is het mogelijk om nog verbeteringen aan te brengen.
De mechanische kant van de elektrische aandrijving (zoals de overbrenging, de plaatsing van
de motor, de plaats van de batterijen) werd reeds gerealiseerd. De �ets draagt het merk
Flanders en weegt 22.8 kg (exclusief de batterijen). Hij wordt in Figuur 2.1 afgebeeld. Zoals op
Figuur 2.1 is te zien, werd de motor samen met de overbrenging op het voorwiel gemonteerd.
Achteraan op de �ets werd er ruimte voorzien waar de batterijen geplaatst kunnen worden.
De �ets dient zo licht mogelijk uitgevoerd te worden want indien de hulpaandrijving wegvalt
(omdat de batterijen leeg zijn bijvoorbeeld), moet de gebruiker op eigen kracht verder. Een
stads�ets weegt gemiddeld 16 kg en dit is dus 7 kg minder dan de beschouwde �ets. De
motor werd samen met de overbrenging op een stalen constructie gemonteerd. Hoe lichter
de constructie op het voorwiel kan gemaakt worden, des te lichter de �ets zal zijn en des te
comfortabeler het zal zijn om met de �ets te rijden.
2.2 De motor
2.2.1 Algemeen
Het grootste verschil met de hedendaagse commerci�ele �etsen zit in de gebruikte motor. In
plaats van een borstelloze gelijkstroommotor te gebruiken, wordt in deze thesis gekozen voor
4

Hoofdstuk 2. De Fiets 5
Figuur 2.1: Elektrische �ets met een serie motor
een universeelmotor. Deze motor werd gekozen om de kostprijs van de elektrische aandrijving
zo laag mogelijk te houden. Dergelijke motoren worden in grote hoeveelheden geproduceerd
voor allerhande huishoudelijke toestellen (mixers, keukenrobotten, ...) en gereedschappen
(boormachines, verticuteermachines, ...) en zijn daarom ook spotgoedkoop. Men gaat ervan
uit dat de levensduur van de borsels 1000 �a 2000 uur is. Als men onderstelt dat er met
assistentie 25 km/u wordt gereden dan is de levensduur 25 000 �a 50 000 km wat voor een
�ets meer dan behoorlijk is.
Deze universeelmotor heeft wel enkele nadelen. Een eerste nadeel is dat de vereiste voedings-
spanning te hoog is voor een rechtstreekse voeding uit de batterij zodat er een convertor
nodig is om de batterijspanning (die typisch een 24 V bedraagt) op te transformeren naar de
hoger vereiste motorspanning (bv. 175 V). Er zal dus een convertor voorzien worden die de
batterijspanning optransformeert tot de nodige motorspanning. Een tweede nadeel is dat het
toerental van de motor hoog is zodat deze snelheid in twee stappen zal gereduceerd moeten
worden.
In wat volgt, worden er kort enkele aspecten van de motor beschreven. Deze motor werd
uitvoerig beschreven in de scriptie van Joris Thys [1]. Voor verdere details omtrent de motor
wordt er dan ook naar deze thesis verwezen.

Hoofdstuk 2. De Fiets 6
2.2.2 De gegevens
De gebruikte motor is een motor uit de verticuteermachine Gardena 4060 (Rasenl�ufter ES
450/32). Dit is een seriemotor met twee bekrachtigingswikkelingen in serie. Uit metingen die
uitgevoerd werden door Joris Thys [1] bleek dat het rendement van de motor sterk kon worden
verbeterd door de bekrachtigingswikkelingen parallel te schakelen. De parallelschakeling van
de bekrachtigingswikkelingen werd dan ook uitgevoerd. Een schematische voorstelling met
de bekrachtigingswikkelingen in parallel wordt in Figuur 2.2 weergegeven.
Vin
+
−
A
+
−
Figuur 2.2: Schematische voorstelling van de motor met de bekrachtigingswikkelingen in parallel
De motorvergelijkingen zijn de volgende:
Vmot = Ea +Rtot � Ia +d
dt(Lm � Ia) (2.1a)
Ea = k � � � a (2.1b)
T = k � � � Ia (2.1c)
k � � = 0:0512 � ln(Ia) + 0:106 (2.1d)
waarbij Rtot = 23 , Lm = 80:4 mH en staat voor de totale opgemeten motorinductantie.
k � � stelt de verzadigingskarakteristiek van de motor voor voor stromen Ia > 0:5 A.
2.3 De overbrenging
De aandrijving gebeurt op het voorwiel door middel van een tandriemoverbrenging. Deze
voorwielaandrijving kan in vraag gesteld worden. Er is immers slipgevaar en interactie bij het

Hoofdstuk 2. De Fiets 7
sturen is mogelijk indien koppel geleverd wordt op het voorwiel. Daarenboven is het moeilijker
om te sturen en vergroot het de kans op vallen indien er een bruuske stuurbeweging dient
gemaakt te worden. Omdat de gebruiker ook zelf moet trappen, wordt het volledig koppel
niet op het voorwiel geleverd maar wordt er ook een aanzienlijk deel van het koppel op het
achterwiel gebracht. Om de constructie zo eenvoudig mogelijk te houden werd er toch voor
een voorwielaandrijving gekozen. De vrijloop is eenvoudig te realiseren door een standaard
achterwiel (dit wiel heeft immers steeds een vrijloop) vooraan te monteren. Op de plaats
waar normaal het tandwiel voor de kettingaandrijving staat, wordt dan een tandwiel van de
tandriemaandrijving gemonteerd.
Er werd gekozen om de maximale snelheid voor een motortoerental van 12 000 rpm te laten
corresponderen met een �etssnelheid van 40 km/u.
2.4 De batterijen
De dag van vandaag is er een ruim gamma aan batterijen beschikbaar1. In de voorgaande
thesis [1] werd gekozen voor 2 lood-gel cel batterijen. Deze keuze werd uit economische
overwegingen gemaakt. Later kan er nog beslist worden om voor een andere batterij te
kiezen.
2.4.1 Hoe werkt een gel accu?
Een gel accu2 is een normale lood-zuurbatterij met het verschil dat het zuur niet vloeibaar
maar wel gel-vormig is, wat een high-tech proced�e vereist tijdens de fabricage. De gassen
die tijdens het laden vrijkomen, worden in de accu omgezet tot een vloeistof. Door dit
recombinatieproces ontsnapt er geen gas.
De voor- en nadelen van lood-zuurbatterijen worden hier kort overlopen. De voordelen zijn:
� de zelfontlading van de batterij is beperkt
� De accu kan vaker worden geladen en ontladen
� De accu is door z'n hogere kwaliteit geschikter voor serie- of parallelschakeling
1Een mooi overzicht wordt gegeven op http://www.buchmann.ca/Article4-Page1.asp2Meer informatie op http://www.mastervolt.nl

Hoofdstuk 2. De Fiets 8
� De accu is geheel gesloten en volkomen onderhoudsvrij (geen vloeistof lekkage en geen
ventilatie nodig)
De nadelen van de lood-zuurbatterij zijn:
� de batterij mag niet te diep ontladen worden
� het opladen van de batterij duurt lang (12 tot 16 uur)
� de batterij heeft een lage energiedichtheid
Uit deze voordelen kan er besloten worden dat een gel accu een goede keuze is voor deze
toepassing. Een nadeel van loodbatterijen is wel dat ze niet te diep ontladen mogen worden
en in het ontwerp dient hier rekening mee gehouden te worden.

Hoofdstuk 3
De Convertor
3.1 Principe
��
��
A
−
+
L1 L2
Lσ2
D2
C3
Vo
i1 i2C
B
VL1
Vin
D1
S1
VC2 VdV2
VL2
Vs
C1 C2
Boostconvertor 1 Boostconvertor 2
Figuur 3.1: Principe schema van de convertor
In deze paragraaf zal de convertor die in Figuur 3.1 staat afgebeeld, bekeken worden als
spanningsverhogende hakker (boostconvertor) hoewel in deze thesis de convertor zal gebruikt
worden als inverterende hakker (buck-boostconvertor). Dit betekent dat de uitgangsspanning
Vo de spanning is die is weergegeven in Figuur 3.1 en de last wordt tussen de klemmen B en
C geschakeld. Indien de convertor als buck-boostconvertor wordt gebruikt dan wordt de last
tussen de klemmen A en B geschakeld. Het is immers eenvoudiger om het principe van de
convertor uit te leggen aan de hand van de boostconvertor. De golfvormen van de convertor
zijn in beide gevallen dezelfde. In wat volgt wordt de werking van de convertor op twee ver-
9

Hoofdstuk 3. De Convertor 10
schillende manieren bekeken.
De convertor kan beschreven worden als een ybackconvertor. Indien de schakelaar S1 is
ingeschakeld dan geleidt diode D2 niet. Ten opzichte van de \gewone" ybackconvertor is dit
een spaarschakeling. De piekspanningen worden afgeleid door diode D1. De spanning VC2
wordt samengeteld met de spanning over de secundaire wikkeling van de transformator VL2.
De convertor kan ook gezien worden als een serieschakeling van twee boostconvertoren (zie
Figuur 3.1). De eerste boostconvertor bestaat uit de primaire wikkeling L1, diode D1, schake-
laar S1 en uitgangscondensator C2. De tweede boostconvertor bestaat uit de secundaire
wikkeling L2, diode D2 en uitgangscondensator C3. In wat volgt, wordt de werking van de
convertor beschreven.
In Figuur 3.2 worden de theoretische stroom- en spanningsgolfvormen van de beschouwde
convertor afgebeeld. De condensatoren C2 en C3 worden voldoende groot ondersteld zodat
de spanning over de condensatoren C2 en C3 constant kan verondersteld worden.
Er wordt verondersteld dat er v�o�or het tijdstip t0 geen stroom i1 loopt door diode D1, terwijl
er door diode D2 een stroom i2 loopt die verschillend is van nul.
Op het tijdstip t0 wordt de schakelaar S1 gesloten zodat de spanning over de schakelaar S1
nul wordt. Er begint een stroom i1 te lopen door de primaire wikkeling L1. Aangezien er
voor het tijdstip t0 een m.m.k.1 N2 � i2 [Aw] liep, gaat deze commuteren naar de primaire
wikkeling L1 met N1 � i1. De spreidingsinductantie L�2 is verantwoordelijk voor de duur van
de commutatie [t0; t1]. Tijdens de duur van de commutatie [t0; t1] neemt i1 de ux over van
i2. De stroom i2 kan niet van zin veranderen, dit wordt door diode D2 verhinderd.
Op het tijdstip t1 wordt de stroom i2 nul. De stroom i1 stijgt met een helling die bepaald
wordt doordi1dt
=vinL1
: (3.1)
De spanning vd wordt bepaald door de spanning over de condensator vC2en de getrans-
formeerde primaire spanning
vd = vC2�n2n1� vin < 0 (3.2)
1m.m.k. staat voor magnetomotorische kracht

Hoofdstuk 3. De Convertor 11
t0 t1 t2 t3 t4t
0
t0
t0
0t
0t
toff
on
i1
iD1
i2 = iD2
vs
vd
vo
vC2
Figuur 3.2: Principe schema van de convertor

Hoofdstuk 3. De Convertor 12
waarbij n1, n2 het aantal windingen van de primaire, respectievelijk secundaire van de trans-
formator voorstellen.
Deze spanning is lager dan vo zodat de diode D2 omgekeerd gepolariseerd blijft. Zo blijft de
stroom i2 nul in het interval [t1; t2]. De stroom i1 blijft stijgen tot op het moment dat de
schakelaar S1 geopend wordt.
Op tijdstip t2 wordt de schakelaar S1 snel geopend, de spanning vs stijgt en bereikt de waarde
vC2. De stroom i1 loopt gedurende de commutatieduur door diode D1 en laadt zo de con-
densator C2 op. Tezelfdertijd commuteert de stroom i1 naar de secundaire wikkeling L2. De
aanwezigheid van de spreidingsinductantie (L�2) bepaalt de helling van de stromen i1 en i2.
Op t3 wordt de stroom i1 nul en spert diode D1. De spanning over de schakelaar S1 zweeft
en wordt bepaald door de batterijspanning vin en door de getransformeerde van de spanning
vL2. Zo wordt de spanning vs over de schakelaar bekomen
vs = vin +n1n2� (vo � vC2
) < vC2: (3.3)
De helling van de stroom i2 wordt bepaald door de som van L2 en L�2. Omdat de stroom i1
nul is, is er geen magnetische koppeling tussen de twee spoelen. Aangezien
L�2 � L2 (3.4)
kunnen de volgende vergelijkingen geschreven worden
v2 � vd � vo (3.5)
De stroom i2 daalt langzaam. De helling van de stroom is omgekeerd evenredig met de
inductantie L2. De inductantie L2 is groot ten opzichte van L1 en veel groter dan L�2. Dit
is duidelijk want het volgende verband geldt immers
L2 = (n2n1
)2 � L1 (3.6)
en de spreiding werd beperkt.
Op t4 wordt opnieuw de startsituatie bereikt en is de cyclus rond.
3.2 Conversieverhouding
In wat volgt wordt de conversieverhouding van de beschouwde convertor afgeleid. Eerst wordt
de conversieverhouding van de beschouwde convertor als boostconvertor afgeleid, vervolgens

Hoofdstuk 3. De Convertor 13
de conversieverhouding van de beschouwde convertor als buckboostconvertor.
Er worden enkele veronderstellingen gemaakt om de berekeningen niet nodeloos te verzwaren.
Zo wordt de lekinductantie van de transformator verwaarloosbaar klein ondersteld. Het ver-
waarlozen van de spreiding heeft tot gevolg dat de commutatieduur verwaarloosd wordt en
het commuteren dus ogenblikkelijk gebeurt, zodat het topje dat zich voordoet bij de spanning
over de schakelaar S1 tussen de tijdstippen t2 en t3 er niet meer is. Wanneer de commutatie
ogenblikkelijk gebeurt, vallen t2 en t3 immers samen. Op deze manier kan de spanning over
de schakelaar S1 benaderd worden door een blokgolf.
In regime moet de tijdsintegraal van de spanning over de primaire wikkeling L1 (vL1) over
een periode gelijk zijn aan 0:
Vin � ton + (Vin � VC2) � toff = 0 (3.7)
tonton + toff
= � (3.8)
met � de pulswijdteverhouding.
Zo kan de conversieverhouding van het eerste deel worden gevonden
VC2=
1
1� �� Vin: (3.9)
Deze redenering wordt gerechtvaardigd door de benadering van de spanning over de schakelaar
S1 door een blokgolf. Op deze manier worden de golfvormen van een boostconvertor bekomen
zodat de beredenering van de conversieverhouding van het eerste deel gerechtvaardigd is.
De conversieverhouding van de volledige convertor wordt als volgt bekomen. Diode D2 geleidt
tussen de tijdstippen t2 en t4 en in dit interval kan de volgende uitdrukking neergeschreven
worden
Vo = VC2� VL2
(3.10)
waarbij de spanning VL2de getransformeerde spanning van VL1
is. In het interval [t2; t3] als
diode D1 geleidt, geldt
VL2=n2n1� (VC2
� Vin): (3.11)
Substitutie van (3.9) en (3.11) in (3.10) geeft:
Vo =1
1� �� Vin �
n2n1� (VC2
� Vin) (3.12)

Hoofdstuk 3. De Convertor 14
Na uitwerking geeft dit de conversieverhouding van de beschouwde convertor als boostcon-
vertor:vovin
=1 + n2
n1� �
1� �(3.13)
De conversieverhouding van de beschouwde convertor als buck-boostconvertor volgt dan uit:
Vo =1 + n2
n1� �
1� �� Vin � Vin (3.14)
Na uitwerking wordt de conversieverhouding van de buck-boostconvertor bekomen:
VoVin
=�
1� �� (1 +
n2n1
) (3.15)
De beschouwde convertor zal als buck-boostconvertor gebruikt worden opdat de uitgangs-
spanning dan vanaf 0 V geregeld kan worden.
3.3 Praktische waarden
De convertor wordt op een batterij van 24 V aangesloten. De spanning die aan de motor
aangelegd wordt, zal vari�eren tussen 0 V en 200 V.
3.4 Praktische realisatie
In wat volgt, worden de schema's van de convertor kort besproken.
3.4.1 Algemeen
Het vermogengedeelte werd van het signaalgedeelte gescheiden om een eenvoudiger systeem
te bekomen. De twee borden worden met elkaar verbonden door middel van een stekker die
de nodige signalen doorgeeft. Op deze manier worden de twee borden ook in elkaar geplugd.
Zo wordt een gemakkelijk te implementeren geheel bekomen. In Figuur 3.3 wordt het geheel
afgebeeld. Bovenaan bevindt zich het vermogengedeelte en onderaan het signaalgedeelte. De
foto is genomen tijdens de testfase. Dit houdt in dat de microprocessor nog niet op het
signaalgedeelte werd aangebracht. De microprocessor stond op het ontwikkelbord dat werd
gebruikt om het programma te testen en te debuggen.

Hoofdstuk 3. De Convertor 15
Figuur 3.3: Vermogengedeelte samen met het signaalgedeelte
3.4.2 Transformator
De transformator werd geconstrueerd gebruik makende van een ETD34 kern van 3C85 mate-
riaal. De convertor werd gebouwd om de batterijspanning van 24 V op te transformeren naar
een uitgangsspanning van 200 V. Om dit te bereiken is er dus een conversieverhouding vereist
van 8.3. In Figuur 3.4 wordt de conversieverhouding van de beschouwde convertor als buck-
boostconvertor afgebeeld in functie van de pulswijdteverhouding � en de windingsverhouding
n2=n1. Met een windingsverhouding die groter is dan �e�en kan een hoge conversieverhouding
bekomen worden terwijl de pulswijdteverhouding kleiner blijft dan 0.65. Op Figuur 3.4 kan
afgelezen worden dat een windingsverhouding van 4 een goede keuze is. In [2] wordt hier
dieper op ingegaan.
Figuur 3.5 toont een doorsnede van de transformator. Deze transformator werd uitgerekend
met behulp van een programma dat werd geschreven door professor A. Van den Bossche. De
primaire wikkeling is een parallelschakeling van 2 keer 8 windingen. De draad die gebruikt
werd is litzedraad van 60 draden van 0.15 mm. Deze primaire wikkeling werd tussen de
secundaire wikkeling gelegd, zoals afgebeeld op Figuur 3.5.

Hoofdstuk 3. De Convertor 16
n /n = 42 1
3
2
1
0
�
V/V
oin
Figuur 3.4: De conversieverhouding van de beschouwde convertor als buck-boostconvertor in functie
van de pulswijdteverhouding � en de windingsverhouding n2=n1
��������������������������������
����������������
��������������
primaire wikkeling
secundaire wikkeling
in parallel
secundaire wikkeling
isolatie
luchtspleet
Figuur 3.5: Opbouw van de transformator
De secundaire wikkeling bevat in totaal 32 windingen. De draad gebruikt voor de secundaire
is litzedraad van 60 draden van 0.1 mm. Er werd een middenaftakking voorzien op de se-
cundaire van de transformator. De resulterende primaire inductantie is 8.8 �H, de secundaire
inductantie bedraagt 140 �H. De dc-weerstand van de primaire wikkeling respectievelijk se-
cundaire wikkeling bedraagt 0.19 respectievelijk 3.4 .
De belangrijkste gegevens worden nog eens samengevat in Tabel 3.1

Hoofdstuk 3. De Convertor 17
primaire secundaire
aantal windingen 8 32
L (�H) 8.8 140
Rdc () 0.19 3.4
Tabel 3.1: Gegevens van de transformator
3.4.3 Vermogengedeelte
In Figuur 3.6 wordt de schematische voorstelling van de convertor gegeven.
De min-klem van de batterij en de plus-klem van de batterij worden aan de VB{ -klem res-
pectievelijk aan de VB+ -klem verbonden. De capaciteit van de ingangscondensator C1 is
4700 �F en is bemeten voor 63 V. Deze condensator �ltert de stroomrimpel eruit die optreedt
bij het schakelen.
De potentiaal van VB+ wordt als referentie genomen. Op deze manier is het mogelijk om
alle benodigde signalen met behulp van shunts te meten. Zo wordt de shunt RSB (zie Figuur
3.6) gebruikt om de batterijstroom te meten, de shunt RSM om de motorstroom te meten.
Met behulp van de shunt RSP wordt de primaire stroom opgemeten. Het schakelsignaal van
de PIC wordt aangeboden aan een optocoupler die het op zijn beurt doorgeeft aan een gate
driver. De condensator C2 is vrij klein gekozen (namelijk 10 �F) omdat de spanning vC2
rimpel mag bevatten. Deze condensator C2 is een polyester�lm condensator bemeten voor
100 V.

Hoofdstuk 3. De Convertor 18
Figuur 3.6: Schema van het vermogengedeelte in Eagle

Hoofdstuk 3. De Convertor 19
��
��
A
−
+
L1 L2
Lσ2
D2
C3
VC3Vs
i1 i2C
B
VL1
VinC1
C2
D1
C4
D5
D4
S1V2 Vd
VC2
VL2
Figuur 3.7: Schematische voorstelling van de convertor met middenaftakking
In Figuur 3.7 wordt de schematische voorstelling van de convertor gegeven. Het snubbercir-
cuit dat werd toegevoegd wordt hier kort besproken. Dit snubbercircuit bestaat uit diode
D4, condensator C4 en diode D5 (zie Figuur 3.7 en 3.6). Diode D5 is verbonden met de
middenaftakking van de secundaire van de transformator. De diode D5 werd daar geplaatst
om drie redenen.
1. Bij het inschakelen worden er spanningspieken in de secundaire spanning (vd) veroor-
zaakt door de aanwezigheid van de spreidingsinductantie. Deze pieken worden door
diode D5 beperkt.
2. Diode D5 ontlaadt de condensator C4 bij het inschakelen van de schakelaar.
3. Diode D4 leidt de transistorstroom af bij het uitschakelen (soft turn-o�).
Deze snubber kan aanzien worden als een verliesloze snubber. Het schakelverlies wordt sterk
beperkt, wat het rendement ten goede komt.

Hoofdstuk 3. De Convertor 20
3.4.4 Hardware beveiliging
Figuur 3.8: Schema van de beveiliging van het vermogengedeelte in Eagle
In Figuur 3.8 wordt het schema van de hardware beveiliging weergegeven. Hoewel de con-
vertor digitaal gestuurd wordt, is het aangewezen om een hardware beveiliging te gebruiken.
Deze beveiliging bewaakt de motorstroom en de uitgangsspanning. Als �e�en van deze groothe-
den zijn maximale waarde overschrijdt, wordt de beveiliging actief. Er wordt dan verhinderd
dat het schakelsignaal aan de gate van de mosfet wordt aangelegd. Deze maximale waarden
worden ingesteld met behulp van de voorziene potentiometers. Als �e�en van de grootheden de
ingestelde grootheid overschrijdt dan wordt pin 1 (als de uitgangsspanning te groot wordt) of
pin 13 (als de motorstroom te groot wordt) laag zodat de desbetre�ende LED gaat branden
en het schakelsignaal aan de gate wordt laag getrokken. Als de motorstroom of de uitgangs-
spanning onder de maximale waarde gedaald is, kan de beveiliging gereset worden door de
drukknop in te drukken.

Hoofdstuk 3. De Convertor 21
3.4.5 Signaalgedeelte
In Figuur 3.9 wordt het schema van het signaalgedeelte weergegeven. De nodige signalen
die via een stekker van de vermogenprint naar de signaalprint worden overgebracht zijn de
volgende
� de voedingen van de elektronica (0 V, +5 V, {5 V)
� de meting van de batterijstroom, Ibat
� de meting van de motorstroom, Imot
� de meting van de uitgangsspanning, Vout
� PWM-signaal geleverd door de PIC
Op het signaalgedeelte bevindt zich een analoog laagdoorlaat�lter voor de metingen Ibat, Iout
en Vout. Deze signalen worden vervolgens aan de PIC aangeboden die zich ook op het sig-
naalgedeelte bevindt. Naast de PIC is er ook nog een oscillator aanwezig die zorgt voor de
klokfrequentie van de PIC. Deze oscillator heeft een frequentie van 40 MHz. De PIC biedt het
PWM-signaal aan het vermogengedeelte. Het PWM-signaal wordt op het vermogengedeelte
via de beveiliging aan de optocoupler aangeboden. Op de signaalprint staan ook de connec-
toren die nodig zijn om de Hall-sensoren (zie hoofdstuk 5) en de �etscomputer met de print
te verbinden.
Zowel op het bovenvlak als het ondervlak is een grondvlak aangelegd zodat de storingen
beperkt worden.

Hoofdstuk 3. De Convertor 22
Figuur 3.9: Schema van het signaalgedeelte in Eagle

Hoofdstuk 3. De Convertor 23
3.5 Metingen
3.5.1 Continue geleidingsmode
In dit stuk worden er metingen uitgevoerd waarbij de convertor in continue geleidingsmode
werkt. De belasting waar de convertor op werd aangesloten bestaat uit een weerstand van
180 met in serie een inductantie van 20 mH. In Figuur 3.10 wordt (van boven naar beneden)
de primaire stroom i1, de schakelspanning vs en het schakelsignaal afgebeeld. De tijdsschaal is
2 �s per divisie. De schaal van de primaire stroom is 20 A per divisie, van de schakelspanning
50 V per divisie en van het schakelsignaal 2 V per divisie.
A
Figuur 3.10: Experimentele golfvormen van de convertor in continue mode: (van boven naar bene-
den) de primaire stroom i1, de schakelspanning vs en het schakelsignaal
In Figuur 3.11(c) is de schakelspanning vergroot weergegeven zodat de overeenkomst met
de theoretische golfvormen (zie Figuur 3.2) duidelijk wordt. Figuur 3.11(a) toont de uit-
gangsspanning van de beschouwde convertor en Figuur 3.11(b) toont de spanning over de
condensator C2. Op Figuur 3.11(d) wordt de spanning vd afgebeeld.

Hoofdstuk 3. De Convertor 24
(a) Uitgangsspanning (b) Condensatorspanning VC2
(c) Schakelspanning Vs (d) Spanning VD2
Figuur 3.11: Golfvormen van de beschouwde convertor in continue geleidingsmode.

Hoofdstuk 3. De Convertor 25
3.5.2 Onderbroken geleidingsmode
In dit deel worden er metingen uitgevoerd waarbij de convertor in onderbroken geleidingsmode
werkt. De belasting waar de convertor op werd aangesloten bestaat uit een weerstand van
180 met in serie een inductantie van 20 mH. In Figuur 3.12 wordt (van boven naar beneden)
de primaire stroom i1, de schakelspanning vs en het schakelsignaal afgebeeld. De tijdsschaal is
2 �s per divisie. De schaal van de primaire stroom is 20 A per divisie, van de schakelspanning
50 V per divisie en van het schakelsignaal 2 V per divisie.
Voor meer informatie omtrent continue, respectievelijk onderbroken geleidingsmode wordt
verwezen naar [3] en [4].
A
Figuur 3.12: Experimentele golfvormen van de convertor in onderbroken mode: (van boven naar
beneden) de primaire stroom i1, de schakelspanning vs en het schakelsignaal
In Figuur 3.13(c) is de schakelspanning vergroot weergegeven. Figuur 3.13(a) toont de uit-
gangsspanning van de beschouwde convertor in onderbroken geleidingsmode en Figuur 3.13(b)
toont de spanning over de condensator C2. Op Figuur 3.13(d) wordt de spanning vd afgebeeld.

Hoofdstuk 3. De Convertor 26
(a) Uitgangsspanning (b) Condensatorspanning VC2
(c) Schakelspanning Vs (d) Spanning VD2
Figuur 3.13: Golfvormen van de beschouwde convertor in onderbroken geleidingsmode.

Hoofdstuk 3. De Convertor 27
3.6 Rendement van de convertor
Bij het opmeten van het rendement van de convertor werd de spanning aan de klemmen van
de convertor gemeten. De batterijstroom werd met behulp van een multimeter opgemeten.
Na vermenigvuldiging van beide getallen werd het ingaand vermogen bekomen. Het uitgaand
vermogen werd met behulp van een Watt-meter opgemeten. Vervolgens werd het rendement
berekend door het uitgaand vermogen door het ingaand vermogen te delen. Enkel het rende-
ment van de convertor wordt hier bepaald, het verbruik van de optocoupler, de gate driver
en dergelijke werd niet opgemeten. Bij elke meting correspondeert een andere pulswijdtever-
houding. De waarden worden in Tabel 3.2 weergegeven. Deze waarden worden gra�sch in
Figuur 3.14 afgebeeld. Het gemiddelde rendement van de convertor bedraagt 92 %.
Vin (V ) Iin (A) Pin (W ) Puit (W ) Vuit Rendement (-)
24.31 1.00 24.31 23.14 66.1 0.90
24.27 1.70 41.26 38.00 88.5 0.92
24.24 2.10 50.90 47.00 98.2 0.92
24.20 2.70 65.34 61.00 110.7 0.93
24.18 3.35 81.00 74.00 123.2 0.91
24.13 4.20 101.35 94.00 138.0 0.93
24.11 4.65 112.11 103.60 144.9 0.92
24.00 5.00 120.00 110.00 142.1 0.92
24.00 5.64 135.36 125.00 141.1 0.92
24.00 6.54 156.96 142.00 140.2 0.90
24.00 6.73 161.52 148.00 173.1 0.92
24.00 7.66 183.84 168.00 138.8 0.91
23.90 9.46 226.09 208.00 136.4 0.92
23.80 10.15 241.57 220.00 210.9 0.91
23.75 12.13 288.09 260.00 132.9 0.90
Tabel 3.2: Het rendement

Hoofdstuk 3. De Convertor 28
0 50 100 150 200 250 30080
82
84
86
88
90
92
94
96
98
100
Uitgaand vermogen (W)
Ren
dem
ent (
%)
Figuur 3.14: Het rendement van de beschouwde convertor in functie van het uitgaand vermogen.

Hoofdstuk 4
De Sturing
4.1 Doelstellingen
In deze thesis wordt er een elektrische aandrijving ontworpen voor een elektrische �ets. Deze
�ets heeft een elektrische hulpaandrijving. Aan de eisen die in 1.2 vermeld zijn, moet de
sturing zeker en vast voldoen. Nu kan er nog de vraag gesteld worden welk soort sturing
ge��mplementeerd zal worden. De meest voorkomende sturingen zijn een vermogensturing en
een koppelsturing. Een vermogensturing zorgt ervoor dat er steeds een constant vermogen
aan de motor wordt aangelegd. In [5] wordt er een vermogensturing ge��mplementeerd. In deze
thesis zal er een koppelsturing ge��mplementeerd worden. De elektrische hulpaandrijving zal
steeds een constant koppel leveren. Om aan de wettelijke eisen te voldoen en om de veiligheid
van de gebruiker te waarborgen, dienen er nog enkele aspecten toegevoegd te worden. Zo kan
de sturing opgedeeld worden in drie grote delen, namelijk:
� Koppelregeling : Deze koppelsturing vertaalt zich in een stroomsturing. De gebruiker zal
kunnen kiezen uit drie niveau's van assistentie: licht, middelmatig en zwaar. Elk niveau
komt dan overeen met een bepaald koppel. Dit koppel correspondeert dan weer met een
bepaalde stroom. Deze stroomsturing zal het meest van de tijd actief zijn, enkel indien
de spanning te hoog oploopt (de snelheid van de �ets stijgt), zal de snelheidsbegrenzing
(spanningsregeling) overnemen.
29

Hoofdstuk 4. De Sturing 30
� Snelheidsbegrenzing : Deze snelheidsbegrenzing vertaalt zich in een spanningsregeling.
Als de motor een snelheid van 7500 rpm1 bereikt dan neemt de snelheidsbegrenzing
over en wordt de motorspanning begrensd. Indien de snelheid van de �etser nog zou
toenemen dan zou de stroom blijven dalen tot de stroom nul wordt en er geen assistentie
meer geleverd wordt.
� Detectie van het trappen: Om aan de eerste wettelijke eis te voldoen, dient er een manier
gevonden te worden zodat de motor enkel werkt als er getrapt wordt. In Hoofdstuk 5
zal hier dieper op ingegaan worden.
4.2 Algemene beschrijving van de digitaal gestuurde buck-
boostconvertor
4.2.1 Opbouw van het systeem
De buck-boostconvertor heeft als taak de batterijspanning op te transformeren naar de ge-
wenste voedingsspanning van de motor. Deze buck-boostconvertor wordt gestuurd door een
microprocessor, nl. de PIC18F452 [6] van de �rma Microchip. Zoals in de inleiding ver-
meld, wordt er een stroom- en een spanningssturing ge��mplementeerd. De uitgangsspanning
en de uitgangsstroom van de buck-boostconvertor worden gemeten. Deze digitale regelaar
heeft digitale waarden nodig. Om de digitale waarde van de meting te bekomen worden de
volgende stappen gevolgd. In een eerste stap worden de grootheden gemeten en met be-
hulp van een analoog circuit herschaald en ge�lterd zodat ze in het juiste bereik liggen dat
overeenstemt met de ingangen van de processor. Het toegepaste �lter is een laagdoorlaat�lter
want de gemeten grootheden zijn immers laagfrequente waarden. In een laatste stap worden
de herschaalde ge�lterde metingen omgezet in een digitale waarde. Deze omzetting houdt,
behalve een discretisatie van het signaal, ook een schaling in, namelijk van een aangeboden
signaalspanning aan de ingang van de A/D-omzetter naar een bepaalde dimensieloze digitale
waarde binnen het getallenbereik dat door de regelaar kan worden voorgesteld. Dit bereik is
afhankelijk van het aantal bits dat de A/D-omzetter ter beschikking heeft, en van de binaire
voorstelling die gebruikt wordt. Er worden 8 bits gebruikt om de digitale waarde voor te
17500 rpm komt overeen met een snelheid van 25 km/u.

Hoofdstuk 4. De Sturing 31
stellen. Aangezien er gekozen werd om de waarden voor te stellen door de (1.7)-complement
notatie zal het bereik liggen tussen -1 en 0.9921785. Hierover volgt later meer. Een digitaal
laagdoorlaat�lter werd ge��mplementeerd om de hoogfrequente storingen uit de signalen te
verwijderen.
De opeenvolgende omzettingen van een analoge grootheid naar een dimensieloze digitale
waarde kunnen worden samengevat in het schema van �guur 4.1 als een herschaling en een dis-
cretisatie. De herschaling van de grootheden imot;in en vout;in naar een dimensieloze grootheid
imot;sch en vout;sch omvat niet enkel de werkelijke herschaling van de gemeten grootheid naar
de ingangssignalen van de A/D-omzetter. Ze omvat ook de schaling die optreedt bij de A/D-
omzetting zelf. De totale schaalfactoren worden uitgedrukt als referentiewaarden Iref en
Vref . De digitale waarde van imot namelijk imot;d wordt gebruikt als ingang van de stroom-
regeling en de digitale waarde van vout namelijk vout;d wordt gebruikt als ingang van de
spanningsregeling. Elke regeling geeft als uitgang een pulswijdteverhouding, de kleinste puls-
wijdteverhouding wordt door middel van een digitale pulswijdtemodulator omgezet naar het
juiste schakelpatroon.
Praktisch kan dit als volgt vertaald worden. De gebruiker heeft een gewenst koppel ingesteld
en dit koppel stemt overeen met een bepaalde stroom. De digitale regelaar zal een pulswijdte-
verhouding bepalen zodat de motorstroom gelijk is aan de ingestelde stroom. De pulswijdte-
verhouding zal inderdaad de meeste tijd door de stroomregeling bepaald worden, enkel indien
de snelheid te groot wordt, zal de spanningsregeling de uitgestuurde pulswijdteverhouding
bepalen en bijgevolg beperken. De stroom zal hierdoor lager zijn dan zijn ingestelde waarde.
4.2.2 Binaire voorstelling met vaste komma en tekenbit
De gebruikte A/D-omzetter heeft een 10 bit resolutie waarbij hier enkel gebruik gemaakt
wordt van de bovenste 8 bits (of nog de 8 MSB's2). De A/D-omzetter heeft een analoog
ingangsbereik van 0V tot 5V, dat overeenstemt met 0h00 tot 0hFF digitaal waarbij 0h00 en
0hFF de hexadecimale voorstellingen zijn van de binaire getallen (0000 0000)B, respectievelijk
(1111 1111)B. Aangezien de A/D-omzetter enkel positieve waarden kan omzetten, wordt hier
geen gebruik gemaakt van een tekenbit. Deze digitale waarden zullen na vergelijking met de
wenswaarde gebruikt worden als ingang van een PI-regelaar. Het is duidelijk dat er zowel
2MSB staat voor Most Signi�cant Bit en stemt overeen met het uiterst linkse bit

Hoofdstuk 4. De Sturing 32
−
+
PWM
1/Vref
1/Iref
imot,sch
imot,sch
A/D
&
LDF
imot,d
vout,d
DigitaleRegelaar
δ
Controller
Vin
L1
D1
S1
L2
C2
Lσ2
VsV2
VL2
i2
VC2
VL1
imot
− +
vout
Motor
imot,in
vout,in
C3
D2
VC3Vd
C1
i1
Figuur 4.1: Schematische voorstelling van het systeem

Hoofdstuk 4. De Sturing 33
positieve als negatieve signalen aan de PI-regelaar aangelegd zullen worden. In de PI-regelaar
zal er dus wel gerekend worden met negatieve waarden. Er zal een tekenbit moeten ingevoerd
worden. Om dit probleem op te lossen wordt het resultaat van de A/D-conversie door twee
gedeeld. Zo schuift alles 1 bit op naar rechts zodat de MSB als tekenbit gezien kan worden. Het
nadeel van deze methode is dat de resolutie gehalveerd wordt. Nu wordt er een 8-bit digitale
voorstelling met tekenbit bekomen. De 2-complement notatie3 is de methode waarvoor werd
gekozen. Hierbij corresponderen in decimale voorstelling de eerste bit, de tweede bit, ... , de
8e bit met respectievelijk �27; 26; ::::; 20.
Hier zal er gebruik gemaakt worden van een 8-bit digitale voorstelling met vaste komma
en met tekenbit en daarvoor wordt een (1.7)-complement notatie gebruikt. Een eenvoudig
voorbeeld zal deze notatie verduidelijken
(1011 0110)B = �(20) + 2�2 + 2�3 + 2�5 + 2�6 = �0:578125: (4.1)
Met de (1.7)-complement notatie voor een 8-bit digitaal getal met tekenbit is het maximum
positieve getal dat men kan voorstellen
(0111 1111)B = 1� (2�7) = 0:9921875: (4.2)
Dit maximum positieve getal kan benaderd worden door 1. Deze maximaal voorstelbare
waarde aan de digitale zijde van de A/D omzetter stemt aan de analoge zijde overeen met
een maximaal meetbare analoge grootheid Iref of Vref .
4.2.3 Digitale regelaar
Het continue tijdsdomein
De PI-regelaar wordt in het continue tijdsdomein gemodelleerd en afgesteld. De transfert-
functie van een PI-regelaar is de volgende
U(s) = (KP +KI
s) � I(s) (4.3)
waarbij I(s) staat voor het error-signaal en U(s) de uitgang van de controller is, \s" is de
Laplace variabele. KP en KI zijn twee parameters die overeenstemmen met het proportionele
32-complement notatie wordt gebruikt om negatieve getallen voor te stellen. Stel het gewenste getal positief
voor bv. 3 : (0000 0011)B , neem hiervan het complement en tel bij het resultaat 1 op, het bekomen binair
getal stelt dan -3 voor, nl. (1111 1101)B

Hoofdstuk 4. De Sturing 34
respectievelijk het integrerende deel van de regelaar. Deze transfertfunctie wordt ook gebruikt
om met behulp van Simulink de PI-regelaar af te stellen.
Vergelijking (4.3) wordt herwerkt zodat de volgende vergelijking bekomen wordt
U(s) = KP � !PI � (
s!PI
+ 1
s) � I(s) (4.4)
met !PI =KI
KP.
Figuur 4.2 geeft een typisch Bode diagram van een PI-regelaar met KP = 0:5 en !PI = 12,
deze waarden voor de parameters corresponderen met de waarden die gebruikt zijn voor de
stroomregellus.
Figuur 4.2: Typische bode plot van een PI-regelaar
Het discrete tijdsdomein
De PI-regelaar zal ge��mplementeerd moeten worden met behulp van een processor. Een di-
gitale sturing vereist dat alles discreet gedaan wordt. Bijgevolg moet er worden overgegaan
van het continue tijdsdomein naar het discrete tijdsdomein. De overgang van het continue
tijdsdomein naar het discrete tijdsdomein heeft tot gevolg dat de integraal moet benaderd
worden door een discrete som. Om de integraal te benaderen wordt hier gebruik gemaakt
van de zogenaamde Zero Order Hold (ZOH)-benadering. Deze benadering houdt in dat het

Hoofdstuk 4. De Sturing 35
errorsignaal constant wordt gehouden op het bemonsteringstijdstip k tot het volgende be-
monsteringstijdstip k+1. Zo wordt de integratie als volgt benaderd
�k+1 = �k + Ik � Tsample: (4.5)
Figuur (4.3) illustreert de ZOH-benadering.
������������������������������������������������
������������������������������������������������
Ik+1
tk k + 1
I(t)
Ik
Σk
Figuur 4.3: Illustratie van de Zero order hold (ZOH)-benadering
Na transformatie naar het Z-domein wordt de volgende vergelijking bekomen
z � �(z) = �(z) + I(z) � Tsample (4.6)
en dit leidt tot
�(z) =Tsample
z � 1� I(z): (4.7)
Op deze manier kan de integratie 1sin vergelijking (4.3) vervangen worden door de eerste
term in vergelijking (4.7). Na substitutie wordt de volgende vergelijking bekomen
U(z) =KP � z +KP � (!PI � Tsample � 1)
z � 1� I(z): (4.8)
Meer informatie over de discrete benadering wordt in [7] gevonden.
Implementatie in de PIC
Vergelijking (4.8) is dan gelijkwaardig met de di�erentievergelijking
Uk+1 = KP � Ik+1 +KP � (!PI � Tsample � 1) � Ik + Uk: (4.9)
Dit kan dan in de volgende vorm geschreven worden
Uk+1 = A1 � Ik+1 +A0 � Ik + Uk: (4.10)
Hoofdstuk 4. De Sturing 36
Vergelijking (4.10) kan dan gemakkelijk geprogrammeerd worden. De microprocessor PIC18F452
laat immers toe om sommen en producten snel te berekenen. Meer over de praktische imple-
mentatie volgt later.
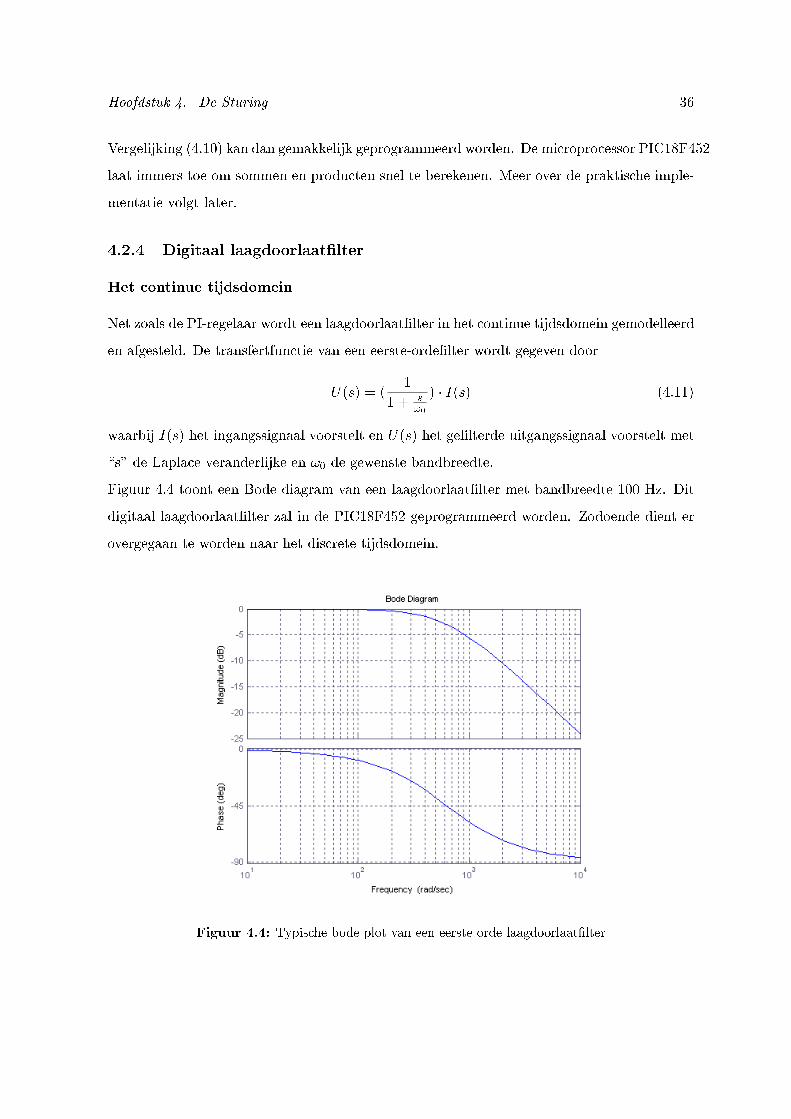
4.2.4 Digitaal laagdoorlaat�lter
Het continue tijdsdomein
Net zoals de PI-regelaar wordt een laagdoorlaat�lter in het continue tijdsdomein gemodelleerd
en afgesteld. De transfertfunctie van een eerste-orde�lter wordt gegeven door
U(s) = (1
1 + s!0
) � I(s) (4.11)
waarbij I(s) het ingangssignaal voorstelt en U(s) het ge�lterde uitgangssignaal voorstelt met
\s" de Laplace veranderlijke en !0 de gewenste bandbreedte.
Figuur 4.4 toont een Bode diagram van een laagdoorlaat�lter met bandbreedte 100 Hz. Dit
digitaal laagdoorlaat�lter zal in de PIC18F452 geprogrammeerd worden. Zodoende dient er
overgegaan te worden naar het discrete tijdsdomein.
Figuur 4.4: Typische bode plot van een eerste orde laagdoorlaat�lter

Hoofdstuk 4. De Sturing 37
Het discrete tijdsdomein
Net zoals bij de PI-regelaar moet de integratie ook hier door een discrete som benaderd
worden. De integratie zal hier benaderd worden met behulp van de First Order Hold (FOH)-
benadering. Deze benadering houdt de volgende werkwijze in. De integraal wordt benaderd
door trapeziumvormige oppervlakken te sommeren. Het principe wordt in Figuur 4.5 getoond.
���������������������������������������������
���������������������������������������������
IkIk+1
tk k + 1
Σk
I(t)
Figuur 4.5: Illustratie van de First order hold (FOH)-benadering
Als de som op tijdstip k door �k voorgesteld wordt, het ingangssignaal op tijdstip k door Ik
en de bemonsteringstijd door Tsample dan wordt de integratie als volgt verkregen
�k+1 = �k +Ik + Ik+1
2� Tsample: (4.12)
Na transformatie naar het Z-domein wordt de volgende vergelijking bekomen
z � �(z) = �(z) + I(z) �1 + z
2� Tsample: (4.13)
Als voorgaande vergelijking opgelost wordt naar �(z), wordt de volgende vergelijking bekomen
�(z) =Tsample
2�z + 1
z � 1� I(z) (4.14)
Zo kan de term 1s, integratie in het continue tijdsdomein, vervangen worden door de term
voor I(z), namelijk
s$2
Tsample
�z � 1
z + 1: (4.15)
De transfertfunctie van het laagdoorlaat�lter in het discrete domein wordt bekomen uit
vergelijking (4.11) en (4.15).
U(z) =
!0 � Tsample
2 + !0 � Tsample
� z +!0 � Tsample
2 + !0 � Tsample
z �2� !0 � Tsample
2 + !0 � Tsample
� I(z) (4.16)

Hoofdstuk 4. De Sturing 38
Meer informatie over de discrete benadering wordt in [8] gevonden.
Implementatie in de PIC
Deze vergelijking wordt omgevormd tot een di�erentievergelijking zodat deze gemakkelijk
met behulp van de PIC geprogrammeerd kan worden. De bekomen di�erentievergelijking is
de volgende
Uk+1 = A1 � Ik+1 +A0 � Ik +B0 � Uk (4.17)
met
A1 =!0 � Tsample
2 + !0 � Tsample
(4.18)
A0 =!0 � Tsample
2 + !0 � Tsample
(4.19)
B0 =2� !0 � Tsample
2 + !0 � Tsample
: (4.20)
Deze vergelijking is gemakkelijk te programmeren.
4.3 Ontwerp van de regelaars
4.3.1 Inleiding
De digitale regelaar bestaat uit twee verschillende regelingen, enerzijds is er de stroomregeling
(koppelregeling) en anderzijds is er de spanningsregeling (snelheidsbegrenzing). Wat is de idee
achter deze digitale regeling? In deze thesis is er gekozen voor een koppelsturing, de �etser
kiest zijn gewenst hulpkoppel. De regeling zal er dan voor zorgen dat de motor constant dit
koppel levert. Om aan de wettelijke eisen met betrekking tot het gebruik van een elektrische
�ets te voldoen, dient ervoor gezorgd te worden dat de motor vanaf 25 km/u geen vermogen
meer levert en dat het geleverde vermogen kleiner blijft dan 250 W. De snelheidsbegrenzing
wordt verzorgd door de spanningsregeling waarbij de maximale spanning functie is van de
motorstroom
max =Vout �Rtot � Imot
(k � �)0: (4.21)
max = 785:4 rad=s stemt overeen met 25 km/u, Rtot = 23 en (k ��)0 is een gemiddelde van
de verzadigingskarakteristiek en bedraagt 0.15. Vergelijking (4.21) geeft dan de uitdrukking

Hoofdstuk 4. De Sturing 39
voor de maximale uitgangsspanning in functie van de motorstroom, namelijk
Vout;max = 118 + 23 � Imot: (4.22)
Het geleverde vermogen moet kleiner blijven dan 250 W op deze manier moet er aan de
volgende betrekking worden voldaan
max � Tmax < 250 W: (4.23)
Als Imot;max = 2 A dan kan eenvoudig nagegaan worden dat er aan vergelijking (4.23) voldaan
is. Imot;max is dan de wenswaarde voor de stroom die overeenstemt met het hoogst mogelijk
instelbare koppel.
4.3.2 Ontwerp van de stroomregelaar
1/2 GLDF (s)−
+iem(s)iwm(s)
GiP I(s)
d1(s)
Gconv(s) Gmotor(s)
vout(s) iout(s)
1/Iref
igm,b(s)
Figuur 4.6: Schematische voorstelling van de stroomregelkring
Figuur 4.6 geeft de schematische voorstelling van de stroomregelkring. Deze stroomregelkring
bestaat achtereenvolgens uit een versterking 12ten gevolge van het inbrengen van de teken-
bit, de stroomregelaar GiP I(s), de pulswijdteverhouding-naar-uitgangspanningtransfertfunctie
Gconv(s), de transfertfunctie van de motor die de motorstroom bepaalt uit de uitgangsspan-
ning Gmotor(s), de transfertfunctie van het laagdoorlaat�lter GLDF (s) en een versterking 1Iref
die de herschaling voorstelt.
GiP I(s) stelt de transfertfunctie van de PI-regelaar voor. Deze transfertfunctie is de volgende
GiP I(s) = KP � (1 +
1
�i � s) (4.24)
met �i =KI
KP. De parameters worden later bepaald.
De transfertfunctie Gconv(s) geeft het verband tussen de pulswijdteverhouding die aangelegd

Hoofdstuk 4. De Sturing 40
wordt aan de convertor en de resulterende uitgangsspanning. De convertor wordt als buck-
boostconvertor gebruikt. Er worden enkel kleine afwijkingen uit de evenwichtstoestand beschouwd.
Op deze manier kan er een kleinsignaalmodel opgesteld worden. Om de afwijkingen rond een
evenwichtspunt te bepalen, wordt de totale di�erentiaal van Vout genomen. Hierbij wordt
de snelle dynamica verwaarloosd aangezien de variaties in � beperkt blijven in frequentie.
Zodoende
�Vout =(1 + n2
n1)
1�D�D ��Vbat +
(1 + n2n1)
(1�D)2� Vbat ���: (4.25)
waarbij D een evenwichtswaarde van de pulswijdteverhouding � is.
Er wordt ondersteld dat de batterijspanning constant blijft zodat de eerste term van het
rechterlid van vergelijking (4.25) geschrapt kan worden. Op deze manier wordt de transfert-
functie Gconv(s) bekomen
Gconv(s) =Vbat � (1 +
n2n1)
(1�D)2: (4.26)
Gmotor(s) geeft het verband tussen de uitgangsspanning die aangelegd wordt aan de motor
en de resulterende motorstroom. De motorvergelijkingen worden beschouwd, zie vergelijking
(2.1). Door linearisatie van de motorvergelijkingen (2.1a) en (2.1b) kunnen afwijkingen uit
een regimetoestand bekeken worden. De index 0 staat voor de regimetoestand. De linearisatie
van de motorvergelijkingen (2.1a), (2.1b) en (2.1d) geeft de volgende vergelijkingen
�Vout = Rtot ��Imot + Lm �d
dt(�Imot) + �(k � �) � a0 + (k � �)0 ��a (4.27a)
�(k � �) = 0:0512 ��Imot
Imot;0: (4.27b)
Om de vergelijkingen niet nodeloos te verzwaren wordt �a = 0 gesteld. Deze aanname is
te verantwoorden door de grote traagheid van de �ets.
Na overgang naar het Laplace domein en combinatie van vergelijking (4.27a) en (4.27b) wordt
de transfertfunctie Gmotor(s) bekomen:
Gmotor(s) =1
Ra + 0:0512 � a0Ia0
+ s � Lm(4.28)
Als laatste is er de transfertfunctie van het laagdoorlaat�lter. De gemeten signalen worden
eerst door een laagdoorlaat�lter geleid alvorens ze aan de A/D-omzetter van de PIC aangelegd

Hoofdstuk 4. De Sturing 41
worden. De transfertfunctie van het laagdoorlaat�lter is de volgende
GLDF (s) =1
(1 + s � �): (4.29)
Nu de verschillende componenten van de stroomregellus bepaald zijn, kan de totale transfert-
functie bekomen worden. Deze transfertfunctie beschrijft de dynamica van de motorstroom.
De transfertfunctie van de stroomregellus is
GI(s) =
1
2�Kp � (1 +
1
�i � s) �Vbat � (1 +
n2
n1)
(1�D)2�
1
Ra + 0:0512 �a0
Ia0+ s � Lm
�
1
1 + s � ��
1
Iref
1 +1
2�Kp � (1 +
1
�i � s) �Vbat � (1 +
n2
n1)
(1�D)2�
1
Ra + 0:0512 �a0
Ia0+ s � Lm
�
1
1 + s � ��
1
Iref
:
(4.30)
De parameters van de PI-regelaar werden bepaald met behulp van Simulink. De respons
van deze transfertfunctie dient voldoende traag te zijn. Dit is nodig om koppelstoten te
vermijden want dit zou immers leiden tot ongemak van de �etser. De bekomen parameters
uit de simulatie zijn: 8><>:KP = 0:5
�i = 12:
(4.31)
De responsie van de stroomregellus wordt in Figuur 4.7 weergegeven.

Hoofdstuk 4. De Sturing 42
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tijd (s)
Mot
orst
room
(A)
Figuur 4.7: De respons van de stroomregellus op een eenheidstap op tijdstip 0
4.3.3 Stabiliteit van de stroomregelaar
In Figuur 4.8 wordt het bode diagram van de open lus stroomregelkring weergegeven. Op
de �guur worden de minimum stabiliteitsgrenzen weergegeven. De stroomregelaar is stabiel
voor de gebruikte versterking.
−150
−100
−50
0
50
100
Mag
nit
ud
e (d
B)
10−3
10−2
10−1
100
101
102
103
104
105
106
−270
−225
−180
−135
−90
−45
0
Ph
ase
(deg
)
Bode Diagram
Frequency (rad/sec)
Figuur 4.8: Het bode diagram van de open lus stroomregelkring

Hoofdstuk 4. De Sturing 43
4.3.4 Ontwerp van de spanningsregelaar
1/2−
+vg
m,b(s)veo(s)vw
o (s)
1/VrefGLDF (s)
d2(s) vout(s)
GvPI(s) Gconv(s)
Figuur 4.9: Schematische voorstelling van de spanningsregelkring
Figuur 4.9 geeft de schematische voorstelling van de spanningsregelkring. Deze spanningsre-
gelkring bestaat achtereenvolgens uit een versterking 12ten gevolge van het inbrengen van de
tekenbit, de spanningsregelaar GiP I(s), de pulswijdteverhouding-naar-uitgangspanningtrans-
fertfunctie Gconv(s), de transfertfunctie van het laagdoorlaat�lter GLDF (s) en een versterking
1Vref
die de herschaling voorstelt.
GvPI(s) stelt de transfertfunctie van de PI-regelaar voor. Deze transfertfunctie is de volgende
GvPI(s) = KP � (1 +
1
�v � s) (4.32)
met �v =KI
KP. De parameters worden later bepaald.
De transfertfunctie Gconv(s) geeft het verband tussen de pulswijdteverhouding die aangelegd
wordt aan de convertor en de resulterende uitgangsspanning. De convertor wordt als buck-
boostconvertor gebruikt. Voor de a eiding van Gconv(s) wordt naar 4.3.2 verwezen. De
transfertfunctie van de convertor wordt hier herhaald
Gconv(s) =Vbat � (1 +
n2n1)
(1�D)2: (4.33)
Als laatste is er de transfertfunctie van het laagdoorlaat�lter. De gemeten signalen worden
eerst door een laagdoorlaat�lter geleid alvorens ze aan de A/D-omzetter van de PIC aangelegd
worden. De transfertfunctie van het laagdoorlaat�lter is de volgende
GLDF (s) =1
(1 + s � �): (4.34)

Hoofdstuk 4. De Sturing 44
Nu de verschillende componenten van de spanningsregellus bepaald zijn, kan de totale trans-
fertfunctie bekomen worden. De transfertfunctie van de spanningsregellus is
GS(s) =
1
2�Kp � (1 +
1
�v � s) �Vbat � (1 +
n2
n1)
(1�D)2�
1
1 + s � ��
1
Vref
1 +1
2�Kp � (1 +
1
�v � s) �Vbat � (1 +
n2
n1)
(1�D)2�
1
1 + s � ��
1
Vref
: (4.35)
De parameters van de PI-regelaar werden bepaald met behulp van Simulink. De respons van
deze transfertfunctie dient voldoende traag te zijn. Een te snelle respons zou tot ongemak
van de �etser leiden. De bekomen parameters uit de simulatie zijn:8><>:KP = 0:3
�v = 23:3
(4.36)
De responsie van de spanningregellus wordt in Figuur 4.10 weergegeven.
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tijd (s)
Uitg
angs
span
ning
(V)
Figuur 4.10: De respons van de spanningsregellus op een eenheidstap op tijdstip 0
4.3.5 Stabiliteit van de spanningsregelaar
In Figuur 4.11 wordt het bode diagram van de open lus spanningsregelkring weergegeven.
Op de �guur worden de minimum stabiliteitsgrenzen weergegeven. De spanningsregelaar is

Hoofdstuk 4. De Sturing 45
stabiel voor de gebruikte versterking.
−100
−80
−60
−40
−20
0
20
40
Mag
nit
ud
e (d
B)
100
101
102
103
104
105
−180
−135
−90
−45
0
Ph
ase
(deg
)
Bode Diagram
Frequency (rad/sec)
Figuur 4.11: Het bode diagram van de open lus spanningsregelkring
4.4 Implementatie van de sturing
4.4.1 Inleiding
In het voorgaande werden de verschillende sturingen besproken en afgesteld. In deze para-
graaf zal de opbouw van de motorsturing besproken worden. De motorsturing bestaat uit
de combinatie van de koppelregeling en de snelheidsbegrenzing. De detectie van het trappen
wordt niet hier maar in hoofdstuk 5 besproken.
4.4.2 De motorsturing en de PIC18F452
In Figuur 4.12 wordt het stroomdiagramma van de motorsturing afgebeeld. De koppelregeling
heeft de motorstroom als ingang. De uitgangsspanning is de ingang voor de snelheidsregeling.
De wenswaarde van de koppelregeling is een constante en kan door de gebruiker ingesteld
worden. De wenswaarde van de snelheidsregeling is variabel en is afhankelijk van de gemeten
motorstroom. Deze wenswaarde dient telkens opnieuw berekend te worden.
De motorsturing kan opgedeeld worden in drie grote delen:
� Inlezen van de waarden en het uitvoeren van het laagdoorlaat�lter
� Uitvoeren van de PI-regelaar

Hoofdstuk 4. De Sturing 46
� Bepalen welke pulswijdteverhouding moet worden uitgestuurd
De A/D-conversie van een meting neemt een 36 �s in beslag en dit is langer dan de periode
van het schakelsignaal (de schakelfrequentie bedraagt 100 kHz). Het bemonsteringsogenblik
kan dus niet op voorhand bepaald worden en het is dus mogelijk dat de motorstroom gemeten
wordt in de buurt van een schakel ank waar zich veel stroompieken bevinden. De metingen
dienen dus \uitgemiddeld" te worden. In 4.2.3 en 4.2.4 werd gezien dat de transformatie van
het continue tijdsdomein naar het discrete tijdsdomein de keuze van een bemonsteringstijd,
Tsample, noodzakelijk maakte. De bemonsteringstijd voor het laagdoorlaat�lter werd 500 �s
gekozen en de bemonsteringstijd voor de motorsturing 4 ms. Zodat elke 500 �s de metingen
worden ingelezen en door het laagdoorlaat�lter geleid en elke 4 ms wordt de PI-regelaar en
de uitsturing van de resulterende pulswijdteverhouding uitgevoerd. Op deze manier worden
de hoogfrequente storingen uit de metingen ge�lterd. Het inlezen van de metingen en het
uitvoeren van het laagdoorlaat�lter gebeurt dus 8 keer sneller dan het uitvoeren van de PI-
regelaar. Om deze timing te verzorgen, wordt er in het programma gebruik gemaakt van
interrupts. Er wordt een timer voorzien die elke 500 �s een interrupt genereert. Als deze
interrupt optreedt, wordt het programma onderbroken en wordt het laagdoorlaat�lter uit-
gevoerd. Tevens wordt ervoor gezorgd dat elke 4 ms de motorsturing wordt uitgevoerd. Het
inlezen van de waarden en het uitvoeren van het laagdoorlaat�lter neemt een 300 �s in beslag
en het uitvoeren van de \motorsturing" (zie Figuur 4.12) neemt 100 �s in beslag. In de rou-
tine \motorsturing"wordt eerst de koppelregeling doorlopen waarna de snelheidsbegrenzing
wordt doorlopen. De koppelregeling en de snelheidsbegrenzing leveren elk een pulswijdtever-
houding. Vervolgens wordt het mininum van de beide pulswijdteverhoudingen genomen. Dit
mininum wordt dan als schakelsignaal gebruikt.
De PIC18F452 werd geleverd met een oscillator met een klokfrequentie van 4 MHz. Deze
klokfrequentie bleek onvoldoende resolutie te kunnen bieden voor het PWM-signaal. De puls-
wijdteverhouding kon maar in stappen van 0.1 gewijzigd worden en dit was te grof om de
motor goed te kunnen sturen. Door een oscillator met een klokfrequentie van 40 MHz te
nemen werd dit probleem opgelost, de resolutie werd verbeterd van 0.1 naar 0.01 pulswijdte-
verhouding. Met de oscillator van 4 MHz zou de gewenste resolutie kunnen bekomen worden
door signalen met verschillende pulswijdteverhouding na elkaar uit te sturen. Het gemiddelde
van deze uitgestuurde pulswijdteverhoudingen moet dan gelijk zijn aan de gewenste pulswijd-

Hoofdstuk 4. De Sturing 47
teverhouding.
Het volledige programma wordt in hoofdstuk 5 besproken.
Imot door LDF
Lees Vout in
Vout door LDF
PI Vout : PI2 δ2
δ1 > δ2?
ja
neen
PI Imot : PI1 δ1
δ = δ2
δ = δ1
Start
Lees Imot in
ja
T ijd voor PI?(TMR1)
neen
motorsturing
Figuur 4.12: Het stroomdiagramma van de Motorsturing

Hoofdstuk 5
Implementatie op de �ets
5.1 Inleiding
In dit hoofdstuk wordt de praktische implementatie nader bekeken. Het is duidelijk dat
het hele systeem niet in �e�en keer is gemaakt. Zo werd het geheel stapsgewijze ontworpen
en geprogrammeerd. Eerst werd de motorsturing bekeken en geprogrammeerd. Vervolgens
werd de trapdetectie eraan toegevoegd en getest. De trapdetectie zorgt ervoor dat er alleen
assistentie geleverd wordt als de �etser meetrapt. In een laatste stap werd de �etscomputer
aan het geheel toegevoegd. De �etscomputer bestaat uit een LCD-display en drie knoppen.
Hiermee kan de gebruiker het gewenste hulpkoppel instellen. Tenslotte werd de �ets op het
systeem aangesloten en werd alles getest. In dit hoofdstuk wordt deze chronologische volgorde
gevolgd met uitzondering van de motorsturing die reeds in 4.4.2 werd besproken.
Eerst en vooral zal de trapdetectie behandeld worden. Wat is de idee? Welke sensoren worden
er gebruikt? Waar wordt alles gemonteerd? Hoe werd de trapdetectie in het programma
verweven? Deze vragen zullen in de volgende paragraaf beantwoord worden.
Vervolgens wordt het LCD display onder de loep genomen. Wat is hier de idee? Hoe ziet de
menustructuur eruit? Welke mogelijkheden zijn er? Welke uitbreidingen kunnen nog gemaakt
worden?
Hierna wordt de structuur van het hele programma naderbij bekeken. Al de verschillende
onderdelen worden hier bij elkaar gevoegd tot �e�en geheel.
Vervolgens zal er gekeken worden waar de print zal geplaatst worden.
Als laatste wordt de test besproken waarbij de �ets aan het systeem werd aangesloten.
48

Hoofdstuk 5. Implementatie op de �ets 49
5.2 In- / uitschakelen van de motor i.f.v. de trapfrequentie
5.2.1 Doelstellingen
E�en van de wettelijke eisen die gesteld wordt met betrekking tot het gebruik van de elektrische
�ets is dat er enkel assistentie mag zijn als de �etser trapt. Om aan deze eis te voldoen dient
er een methode uitgedacht te worden die de motor laat inschakelen als er getrapt wordt en die
de motor ook uitschakelt als er gestopt wordt met trappen. Het is ook logisch dat er alleen
assistentie geleverd wordt als de �etser vooruit trapt. De richting waarin de �etser trapt zal
gedetecteerd moeten worden.
5.2.2 Principe
In Figuur 5.1 is er een schematische voorstelling gegeven van het kamwiel. Op elk van de
vijf spaken wordt er een magneet geplaatst. Op het kader van de �ets worden twee Hall-
sensoren geplaatst die vlak naast elkaar staan. Zo is het duidelijk dat als het kamwiel in de
positieve richting draait, Hall-sensor H2 de eerste is die een magneet ziet voorbijgaan. In de
omgekeerde richting is het Hall-sensor H1 die de eerste is die een magneet ziet voorbijgaan.
������
������
������
������
������
������
��������
��������
���������
���������
���������
������������������
���������
+Magneet
Hall − sensor
H1
H2
Figuur 5.1: Principe trapdetectie
Wat zijn de verschillende voorwaarden opdat de motor ingeschakeld mag worden of opdat de

Hoofdstuk 5. Implementatie op de �ets 50
motor mag blijven werken?
1. De trapfrequentie moet minstens 30 pedaalslagen per minuut bedragen. Aangezien er 5
magneten worden geplaatst, moet er elke 400 ms een magneet de Hall-sensor passeren.
Als de tijd tussen het voorbijgaan van 2 magneten kleiner of gelijk aan 400 ms is dan
mag de motor werken
2. Als de draairichting positief is, mag de motor werken
3. Bij vertrek uit stilstand dienen er 2 omwentelingen gemaakt te worden alvorens de motor
gestart wordt. Deze 2 omwentelingen vertalen zich in 10 pulsen, de tijd tussen elke puls
dient nog steeds kleiner te zijn dan 400 ms.
Wanneer moet de motor uitgeschakeld worden?
1. Als de tijd tussen 2 pulsen groter is dan 400 ms
2. Als de draairichting negatief is
Om de richting waarin getrapt wordt te bepalen, wordt de volgende redenering gebruikt.
Indien de �etser vooruit trapt dan passeert er voorbij H2 een magneet en die veroorzaakt
een puls van hoog naar laag. Bij deze overgang wordt er gecontroleerd of de magneet nu al
voorbij H1 is gegaan. Is de uitgang van H1 nu hoog of laag? Indien de uitgang van H1 hoog
is dan trapt de �etser vooruit, zie Figur 5.2(a). Indien de uitgang van H1laag is dan trapt
de �etser achteruit en wordt de situatie afgebeeld in Figuur 5.2(b) bekomen. Op deze manier
wordt er gedetecteerd in welke richting de �etser trapt.

Hoofdstuk 5. Implementatie op de �ets 51
H11
0 t
t0
1H2
ti
(a) Er wordt vooruit getrapt
H11
0 t
t0
1H2
ti
(b) Er wordt achteruit getrapt
Figuur 5.2: Detectie van de richting van trappen
Aan de hand van vier verschillende situaties zal het ge��mplementeerde principe worden ver-
duidelijkt. De vier situaties zijn:
1. de �etser vertrekt vanuit stilstand
2. de �etser is aan het rijden en trapt sneller dan 30 pedaalslagen per minuut
3. de �etser stopt met trappen en laat zich uitbollen
4. de �etser moet onmiddellijk stoppen en trapt achteruit zodat de motor direct stopt met
koppel leveren.
In het eerste geval vertrekt de �etser vanuit stilstand. Opdat de motor in werking zou treden,
dient de �etser twee omwentelingen te maken. Deze omwentelingen moeten zo gebeuren
dat er elke 400 ms een magneet voorbij de sensor gaat. Twee omwentelingen maken in de
negatieve richting doet de motor niet starten. De processor houdt het aantal omwentelingen
bij. Indien er achteruit getrapt wordt, wordt het aantal omwentelingen gewist en wordt de
motor uitgeschakeld (indien deze reeds in werking zou zijn). Te traag trappen heeft hetzelfde
resultaat.
Eens de motor werkt, moet de �etser blijven trappen. Elke 400 ms dient de processor een
puls van Hall-sensor H2 te ontvangen. Een timer wordt gebruikt om ervoor te zorgen dat de

Hoofdstuk 5. Implementatie op de �ets 52
motor enkel werkt indien er sneller getrapt wordt dan 30 pedaalslagen per minuut.
Als de �etser stopt met trappen en zich laat uitbollen dan zal de timer na 400 ms opmerken
dat er gestopt is met trappen. De wenswaarde van de stroom wordt dan naar 0 gebracht
zodat de motor na ongeveer 1 s geen koppel meer levert. Op deze manier duurt het 1.4 s tot
de motor ophoudt met koppel leveren.
Achteruit trappen heeft tot gevolg dat de motor onmiddellijk wordt uitgeschakeld.
In de volgende paragraaf wordt de digitale implementatie besproken.
5.2.3 Digitale implementatie
Het programma maakt gebruik van verschillende variabelen. Aan elke variabele wordt een
bepaalde betekenis gehecht. De belangrijkste variabelen worden hier kort vermeld opdat het
principe van het programma duidelijk zou worden. Zo is er de variabele \MOT" die wordt
gebruikt om aan te duiden of de motor in werking is. De motor is in werking als \MOT=1"
en is uitgeschakeld als \MOT=0". Hiernaast is er de variabele \pulsteller" die het aantal
pulsen bijhoudt die Hall-sensor H2 gedetecteerd heeft. Waarom deze variabelen gede�nieerd
werden, wordt later in de tekst duidelijk.
Hall-sensor H2 wordt verbonden met een poort van de microprocessor die een interrupt
genereert als het signaal van de sensor van hoog naar laag gaat. In Figuur 5.3 wordt het
stroomdiagramma getoond van de interrupt routine ten gevolge van Hall-sensor H2. Als een
magneet voorbij Hall-sensor H2 gaat dan wordt er een \Interrupt trapper" gegenereerd. De
routine \Interrupt trapper" begint met het herstarten van de timer die ervoor zorgt dat het
trappen sneller gebeurt dan 30 omwentelingen per minuut. Eerst wordt de richting bepaald
door te kijken naar Hall-sensor H1 zoals in 5.2.1 werd beschreven. Vervolgens wordt er gecon-
troleerd of de motor in werking is door te kijken welke waarde de variabele \MOT" heeft. Als
de variabele \MOT" �e�en is dan wordt de interrupt routine verlaten en wordt het programma
verdergezet. Indien de variabele \MOT" nul is, wordt er gecontroleerd hoeveel magneten er
reeds voorbij de Hall-sensor H2 gegaan zijn. Er wordt gecontroleerd of de variabele \pul-
steller" reeds de waarde 10 bevat (zijn er reeds 2 omwentelingen gemaakt?). Indien dit zo is,
wordt de variabele \MOT" �e�en gemaakt en wordt de motor gestart door naar het deelpro-
gramma \Motorsturing" te gaan. Indien de variabele \pulsteller" nog niet gelijk is aan 10
wordt \pulsteller" met �e�en verhoogd en wordt er gewacht tot de volgende \Interrupt trapper"

Hoofdstuk 5. Implementatie op de �ets 53
optreedt.
Naast Hall-sensor H2 bezit ook de timer de mogelijkheid een interrupt te genereren. Indien
de timer 400 ms bereikt heeft, wordt de wenswaarde op 0 gebracht zodat de motor na een tijd
(ongeveer 1 s) geen koppel meer levert. De variabelen \MOT" en \pulsteller" worden gelijk
aan 0 gesteld.
neen
ja
Interrupttrapper?
V ooruit?neen
Schakel motor uit
ja
MOT = 1?ja
neen
pulsteller = 10?ja
MOT = 1
pulsteller + 1
Naar Motorsturing
Naar Motorsturing
Figuur 5.3: Stroomdiagramma van de interrupt routine van de trapdetectie

Hoofdstuk 5. Implementatie op de �ets 54
5.3 LCD-display
5.3.1 Doelstellingen
Een digitaal gestuurde elektrische �ets zou niet hetzelfde zijn, mocht er een �etscomputer
ontbreken. Het is duidelijk dat een �etscomputer veel mogelijkheden biedt. Zo kan de snel-
heid, de afgelegde weg, de gemiddelde snelheid, het aantal verbruikte calori�en enzovoort
ge��mplementeerd worden. De microprocessor beschikt over Flash-geheugen (zie [6]). Met be-
hulp van het Flash-geheugen kunnen er gegevens opgeslagen worden zoals de afgelegde weg,
de gemiddelde snelheid etc. Zodat de gegevens worden bewaard zelfs als de batterij wordt
afgekoppeld. In deze thesis wordt de �etscomputer voorlopig enkel gebruikt om de stand van
de assistentie in te stellen. De opgesomde mogelijkheden kunnen later nog ge��mplementeerd
worden. Het LCD-display dat werd gekozen heeft 2 lijnen en 16 kolommen.
In wat volgt zal de menustructuur uit de doeken gedaan worden. Als laatste wordt de prak-
tische implementatie besproken.
5.3.2 Menustructuur
De gebruiker zal de mogelijkheid hebben om de stand van de assistentie in te stellen en om
de asssistentie uit te schakelen. De gebruiker zou de assistentie willen uitschakelen om de
batterij te sparen omdat er nog een lastig heuvelachtig parcours voorop ligt. Er zijn drie
knoppen: de knop \Vorige", \Enter" en \Volgende".
Er zijn twee hoofdmenu's namelijk
1. \Instellen stand"
2. \Assistentie: Aan/Uit"
Het tweede hoofdmenu zou vermeden kunnen worden door een extra stand te voorzien die
overeenstemt met wenswaarde 0. Er werd gekozen voor een tweede hoofdmenu om aan te
tonen dat uitbreiding mogelijk is.
Elk hoofdmenu heeft zijn desbetre�ende submenu's. Zo zijn de submenu's van het hoofdmenu
\Instellen stand"
� \Nu: stand X"
\stand 1"

Hoofdstuk 5. Implementatie op de �ets 55
� \Nu: stand X"
\stand 2"
� \Nu: stand X"
\stand 3"
waarbij X staat voor de stand die is ingesteld. Door de knop \Volgende" in te drukken wordt
de tweede lijn gewijzigd, bijvoorbeeld van stand 1 naar stand 2 waarbij de \Instelling: stand
1" is. Als nu de knop \Enter" wordt ingedrukt dan wordt de instelling gewijzigd van stand 1
naar stand 2. De eerste lijn wordt ook veranderd van \Instelling: stand 1" naar \Instelling:
stand 2". Op deze wijze weet de gebruiker steeds welke instelling gebruikt wordt. De knop
\Vorige" brengt de gebruiker terug naar het hoofdmenu.
De submenu's van het hoofdmenu \Assistentie: Aan/Uit"zijn
� \Assistentie: XXX"
\Aan"
� \Assistentie: XXX"
\Uit"
waarbij XXX staat voor Aan of Uit. De redenering is analoog aan die van het menu \In-
stellen stand". Tijdens het �etsen kan de assistentie in- en uitgeschakeld worden. Indien
de assistentie opnieuw (standaard is de assistentie ingeschakeld) wordt ingeschakeld dan di-
enen er opnieuw twee omwentelingen gemaakt te worden waarbij de �etser sneller trapt dan
30 omwentelingen per minuut. Het inschakelen van de assistentie heeft dus niet tot gevolg
dat de motor onmiddellijk gestart wordt.
5.3.3 Implementatie
Om de redenering van de digitale implementatie van de �etscomputer te kunnen volgen,
dienen er eerst een paar variabelen gede�nieerd te worden.
Aangezien de gebruiker de mogelijkheid bezit de sturing uit te schakelen, moet er een variabele
gede�nieerd worden die dit aangeeft. De variabele \ASS" geeft aan dat de assistentie in- of
uitgeschakeld is. Indien \ASS=1" dan is de assistentie ingeschakeld.
Omdat het programma steeds moet weten welk menu op het LCD-display wordt weergegeven,

Hoofdstuk 5. Implementatie op de �ets 56
krijgt elk menu een nummer. Dit nummer wordt in de variabele \LCDMenu" bijgehouden.
Indien de verschillende mogelijkheden worden overlopen, worden er 15 verschillende menu's
bekomen.
Indien er wordt overgegaan van het hoofdmenu \Instellen stand" naar het desbetre�ende
submenu, moet het programma weten welke stand staat ingesteld. De instelling van de stand
wordt in de variabele \StandWens" bijgehouden.
Het indrukken van �e�en van de drie knoppen moet de tekst op het LCD-display wijzigen.
Als �e�en van de drie knoppen wordt ingedrukt, wordt er een interrupt gegenereerd. Deze
interrupt heeft tot gevolg dat het programma de LCD-routine uitvoert. In deze LCD-routine
wordt er eerst bepaald in welk menu het display zich bevindt. Als dit gebeurd is, wordt
er overgegaan naar de subroutine van het desbetre�ende submenu. In Figuur 5.5 wordt
het stroomdiagramma afgebeeld van de stappen die worden gevolgd indien �e�en van de drie
knoppen bij het LCD-display wordt ingedrukt.
Routine MenuX
Knop V orige?
neen
Knop Enter?ja
neen
ja
jaKnop V olgende?
Naar routine KnopEnterX
Naar routine KnopV olgendeX
Naar routine KnopV origeX
Figuur 5.4: Het stroomdiagramma van de subroutine \Menu X" van de interrupt routine als �e�en van
de drie knoppen bij het LCD-display wordt ingedrukt
Elk subroutine \Menu X" begint met te controleren welke knop werd ingedrukt. De knop
\Vorige" heeft namelijk twee verschillende betekenissen. Indien \Instellen stand" of \As-
sistentie: Aan/Uit" wordt afgebeeld dan wordt met de knop van het ene menu naar het
andere overgegaan. Als de knop \Vorige" wordt ingedrukt indien �e�en van de deelmenu's
wordt afgebeeld, dan wordt het deelmenu verlaten. Figuur 5.4 toont het stroomdiagramma

Hoofdstuk 5. Implementatie op de �ets 57
neen
ja
Interruptknop LCD?
Welk menu?
Menu 15?
neen
Menu 14?
....
Menu 1?
ja
ja
neen
jaNaar routine Menu15
Naar routine Menu14
Naar routine Menu1
Figuur 5.5: Het stroomdiagramma van de interrupt routine als �e�en van de drie knoppen bij het
LCD-display wordt ingedrukt

Hoofdstuk 5. Implementatie op de �ets 58
van de subroutine \Menu X" die wordt uitgevoerd indien werd bepaald welk menu op het
LCD-display stond weergegeven alvorens de knop werd ingedrukt.
Schrijven naar het LCD-display gebeurt per karakter. Het LCD-display is veel trager dan de
processor zodat tussen het schrijven van karakters 40 �s moet gewacht worden. Het is niet
erg dat de processor moet wachten. Zoals in de volgende paragraaf wordt besproken, kan dit
schrijven naar het LCD-display onderbroken worden door een ander proces. Er wordt enkel
naar het LCD-display geschreven als er een knop wordt ingedrukt.
De methode die gebruikt werd om de menustructuur te programmeren leent zich niet om
makkelijk extra menu's toe te voegen. Als het aantal menu's beperkt is, is dit een eenvoudige
oplossing. Indien het aantal menu's wordt uitgebreid, dient er gekeken te worden naar andere
programmeermethodes.
5.4 Het volledige programma
De motorsturing, trapdetectie en de �etscomputer moeten samen verweven worden. Alvorens
het geheel te overlopen, wordt er eerst wat uitleg gegeven omtrent het begrip \interrupt
prioriteit". Opdat het programma goed zou werken, is het nodig dat de timing van elk
onderdeel correct is. Deze timing wordt verzorgd door een combinatie van timers en interrupts.
De Motorsturing kan aanzien worden als het belangrijkste onderdeel van het programma
en dient bijgevolg voorrang te krijgen. Om het ene deel voorrang te geven op het andere
wordt er gebruik gemaakt van \interrupt prioriteit". De PIC18F452 heeft twee niveau's van
interrupts, namelijk lage en hoge prioriteit. Een lage interrupt kan onderbroken worden door
een hoge interrupt maar niet omgekeerd. Indien er een lage interrupt optreedt tijdens een hoge
interrupt, dan wordt de lage interrupt maar uitgevoerd als de hoge interrupt is afgewerkt.
Het volledige programma maakt gebruik van vier verschillende interrupts, namelijk
� Interrupt veroorzaakt door Hall-sensor H2 (Int1).
� Interupt veroorzaakt door Timer0. Elke 400 ms moet er een magneet voorbij Hall-sensor
H2 gaan (TMR0).
� Interrupt veroorzaakt door het indrukken van �e�en van de knoppen bij het LCD-display
(RBI).

Hoofdstuk 5. Implementatie op de �ets 59
� Interrupt veroorzaakt door Timer1. Deze timer zorgt ervoor dat de timing van de
motorsturing correct is (TMR1).
Elke interrupt heeft een bepaald prioriteitsniveau. De volgende interrupts hebben een hoge
prioriteit:
� Interrupt veroorzaakt door Hall-sensor H2 (Int1).
� Interupt veroorzaakt door Timer0.
� Interrupt veroorzaakt door Timer1.
De volgende interrupt heeft een lage prioriteit:
� Interrupt veroorzaakt door het indrukken van �e�en van de knoppen bij het LCD-display
(RBI).
Aangezien de PIC18F452 maar twee verschillende interrupt niveau's voorziet, is het aantal
mogelijkheden beperkt. Int1, TMR0 en TMR1 hebben nu een hoge prioriteit en dit strookt
niet met de aanname dat de motorsturing de hoogste prioriteit moet krijgen. De motorstu-
ring (TMR1) deelt immers de hoge prioriteit met twee andere interrupts. Waarom krijgen
deze twee andere interrupts dan niet de lage prioriteit? Dit werd zo gekozen in het kader
van de veiligheid van de bestuurder en de goede werking van de trapdetectie. Het is immers
belangrijk dat de motor uitgeschakeld wordt indien de �etser stopt met trappen. Indien de
�etser stopt met trappen, zal na 400 ms Timer0 een interrupt genereren die de wenswaarde
van de motorstroom naar 0 brengt. De sensor moet elke 400 ms zeker een magneet zien. Deze
voorwaarde is voldaan als de �etser sneller dan 30 omwentelingen per minuut trapt. Telkens
er een magneet voorbij de sensor gaat, wordt Timer0 herstart. Indien dit niet het geval zou
zijn, resulteert dit in een slechte werking van het systeem. Na het herstarten van de Timer0,
doorloopt het programma de routine die in 5.2.3 werd beschreven.
Nu kan de vraag gesteld worden wat er gebeurt als het programma bezig is aan de inter-
rupt van de motorsturing en er treedt een interrupt op veroorzaakt door TMR0 (de �etser
is gestopt met trappen). De routine van de motorsturing moet elke 4 ms doorlopen worden
maar de hele routine neemt maar 400 �s in beslag. Er zijn dus momenten wanneer niets
gebeurt. De processor wacht dan op de volgende interrupt. Elk van de vier gebruikte in-
terrupts kan dan optreden. Als de beschouwde situatie zich voordoet, duurt het maximaal

Hoofdstuk 5. Implementatie op de �ets 60
400 �s alvorens de motor uitgeschakeld wordt door het optreden van de interrupt TMR0.
Deze 400 �s mogen zeker en vast verwaarloosd worden en er kan aangenomen worden dat er
onmiddellijk gereageerd wordt.
Het indrukken van �e�en van de drie knoppen bij het LCD-display resulteert in de interrupt
RBI. Een LCD-display is traag vergeleken met de processor. Het LCD-display is ook niet
cruciaal in het systeem. Daarom heeft de interrupt RBI een lage prioriteit gekregen. Op deze
manier kunnen de andere interrupts, deze interrupt onderbreken.
Tenslotte wordt Low Voltage Detection besproken. Low Voltage Detection (zie [6]) is een
functie van de processor die de voedingsspanning in het oog houdt. Indien de voedingsspan-
ning onder een bepaalde waarde komt, dan voert de processor de routine uit die de sturing
uitschakelt. Op deze manier wordt de sturing op een gecontroleerde manier stopgezet. De
routine die de sturing uitschakelt maakt het schakelsignaal laag, maakt de variabelen \MOT"
en \ASS" laag en stuurt een bericht naar het LCD-display. De �etser wordt via de �ets-
computer verwittigd dat de batterij leeg is. Zo wordt de batterij beschermd tegen een te
diepe ontlading. Als alternatief kan de batterijstroom opgemeten worden en kan er worden
bijgehouden hoeveel Ah1 het systeem reeds verbruikt heeft. Indien 50 % van de opgegeven
capaciteit bereikt wordt, kan er een routine uitgevoerd worden die het systeem uitschakelt en
de gebruiker via de �etscomputer verwittigt dat de batterijen dienen opgeladen te worden.
In Figuur 5.6 wordt het stroomdiagramma van het volledige programma afgebeeld. De Low
Voltage Detection wordt niet afgebeeld omdat dit meer een beveiliging is en geen cruciaal
onderdeel van het programma uitmaakt.
5.5 Plaatsing van de verschillende componenten
In Figuur 2.1 wordt de �ets afgebeeld. De microprocessor bevindt zich op de signaal-print. De
signaaldraden van de sensoren en van de �etscomputer moeten op de signaal-print aangesloten
worden. De signaal-print en de vermogen-print worden op elkaar gemonteerd zodat er een
compact geheel verkregen wordt. De vermogenprint wordt bij de batterijen achteraan op de
�ets geplaatst. Hoe dichter de vermogen-print bij de batterijen staat, hoe minder lang dat
de voedingskabels moeten zijn. Als de voedingskabels langer worden, is er meer jouleverlies
en daalt het rendement van het systeem. De ingangsstroom van de convertor kan immers
1Ah staat voor amp�ere uur en wordt gebruikt om de capaciteit van een batterij weer te geven

Hoofdstuk 5. Implementatie op de �ets 61
Start
Interrupttrapper?
Initialisatie
ja
neen
ja
Ga naar Routine
Ga naar Routine
neen
neen
ja
ja
neen
T imer1?Interrupt ja Ga naar Routine
Motorsturing
neen
MOT = 1?
ASS = 1?
ingedrukt?Toets LCD
Interrupt Trapper
Interrupt Knop LCD
zie F iguur 5.3
zie F iguur 5.5
zie F iguur 4.12
Figuur 5.6: Het stroomdiagramma van het volledige programma

Hoofdstuk 5. Implementatie op de �ets 62
oplopen tot 10 A rms. De motor bevindt zich op het voorwiel. De voedingskabels van de
motor dienen van achteraan naar het voorwiel gebracht te worden. De uitgangsstroom is laag
en de uitgangsspanning is hoog, beide golfvormen bezitten daarenboven weinig rimpel. Het
vormt dan ook geen probleem dat de bekabeling naar de motor deze afstand moet overbruggen.
5.6 De digitaal gestuurde elektrische �ets uitgetest
Tijdens het ontwerp van het systeem werd het geheel steeds getest met als last een regelbare
weerstand met een inductantie in serie. Een wenswaarde voor de stroom werd ingesteld. De
spanningsbegrenzing (snelheidsbegrenzing) werd getest door de weerstand te verhogen. Het
verhogen van de weerstand heeft tot gevolg dat de sturing de uitgangsspanning opdrijft maar
als de maximale spanning bereikt wordt, dient de sturing de spanning te begrenzen. Deze
testen hadden steeds een positief resultaat.
De laatste stap was dan ook het aansluiten van het systeem op de �ets. Op deze manier kon
er gecontroleerd worden of de gewenste responsie bekomen wordt. De convertor werd gevoed
door een Delta-voeding met een spanning van 24 V. De uitgangsklemmen van de convertor
werden met de klemmen van de motor verbonden en de wenswaarde van de stroom werd op �e�en
ampere ingesteld. De �ets werd op een houder geplaatst zodat het voorwiel vrij kon draaien.
De trapdetectie werd uitgeschakeld zodat er geen pulsen nodig waren om de motor te doen
draaien. De sturing werd gestart. De snelheid van het voorwiel werd geleidelijk hoger. Het
voorwiel kon vrij draaien zodat het systeem in nullast werkte. De snelheidsbegrenzing trad
in werking, zo werd de uitgangsspanning van de convertor op een constante waarde geregeld
en de snelheid van het voorwiel bleef constant. Indien het voorwiel werd afgeremd, daalde de
spanning en nam de koppelregeling over. De koppelregeling regelde de motorstroom naar de
ingestelde stroom. Op deze manier werden beide regelingen gecontroleerd en kan er besloten
worden dat beide regelingen correct werken.
Dit is slechts een eerste test die werd uitgevoerd. Verdere testen zijn noodzakelijk om het
systeem te optimaliseren zodat een commerci�eel product bekomen wordt.

Hoofdstuk 6
Besluit
Het doel van deze scriptie was een digitaal gestuurde elektrische aandrijving voor een �ets te
ontwerpen. Deze aandrijving bestaat uit een dc-dc convertor en een microprocessor die de
sturing verzorgt. Naast de convertor en de microprocessor werden er Hall-sensoren aangekocht
die de trapdetectie verzorgen. Tevens werd een LCD-display aangekocht op basis waarvan er
een soort �etscomputer gebouwd werd.
De convertor die in dit eindwerk werd beschreven slaagt erin een batterijspanning van 24 V te
transformeren met een hoog rendement (92%) tot een uitgangsspanning van 200 V. Er werd
een snubbercircuit aan de convertor toegevoegd die het schakelverlies beperkt.
De sturing werd voorheen steeds door een analoog controlecircuit verzorgd. In dit eindwerk
werd er voor een microprocessor gekozen om de sturing te verzorgen. Het programmeren van
een microprocessor heeft veel voordelen. Enkele voordelen van een digitale sturing zijn:
� de sturing is makkelijk aan te passen of uit te breiden
� de microprocessor kan zowel de sturing van de motor verzorgen als de sturing van de
�etscomputer
� eenmaal de sturing geprogrammeerd is, is het programma eenvoudig te verspreiden
� een microprocessor is zeer compact, vergeleken met een analoog stuurcircuit
63

Hoofdstuk 6. Besluit 64
De �etscomputer die werd ontworpen heeft maar beperkte mogelijkheden. Zo kan er enkel
de stand van de assistentie ingesteld worden en kan de assistentie aan- en uitgeschakeld wor-
den. De snelheid, afgelegde weg en andere zaken zouden nog op de �etscomputer kunnen
weergegeven worden. Op de signaalprint werd een aansluiting voorzien voor een Hall-sensor
die op een wiel gemonteerd kan worden zodat de snelheid gemeten kan worden. Er zijn nog
uitbreidingsmogelijkheden.
In deze thesis werd een eerste ontwerp van een digitaal gestuurde elektrische �ets gemaakt.
Dit is een eerste stap naar een commercieel product. In een volgende stap kan er naar de
volgende zaken verder gekeken worden:
� de schakeling voor de signaalverwerking kan verbeterd worden
� het programma kan e�ci�enter of op een andere manier geprogrammeerd worden
� de sturing ge��mplementeerd op de �ets dient verder getest te worden
� naast de koppelsturing kan er gekeken worden naar een vermogensturing
� etc.
Deze thesis biedt een stevige basis waarop kan verder gebouwd worden. Met de stijgende
brandstofprijzen heeft elektrische tractie kans op een mooie toekomst waarin de digitaal ge-
stuurde elektrische �ets zeker niet mag ontbreken en daarom dient er zeker verder gebouwd
te worden op deze thesis!
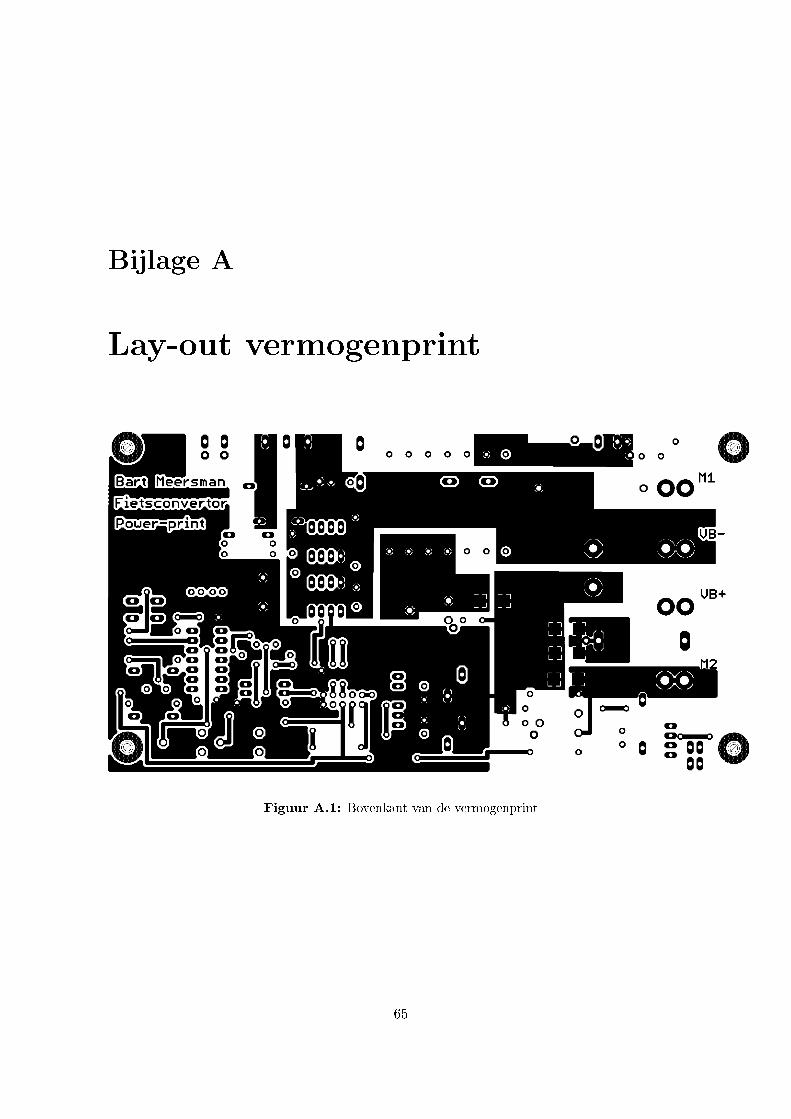
Bijlage A
Lay-out vermogenprint
Figuur A.1: Bovenkant van de vermogenprint
65

Bijlage A. Lay-out vermogenprint 66
Figuur A.2: Onderkant van de vermogenprint

Bijlage B
Lay-out signaalprint
Figuur B.1: Bovenkant van de signaalprint
67

Bijlage B. Lay-out signaalprint 68
Figuur B.2: Onderkant van de signaalprint

Bijlage C
Lay-out LCD-print
Figuur C.1: Bovenkant van de LCD-print
69

Bijlage C. Lay-out LCD-print 70
Figuur C.2: Onderkant van de LCD-print

Bibliogra�e
[1] J. Thys. Elektrische �ets voor middellange afstand. Afstudeerwerk, Universiteit Gent,
2002.
[2] David M. Van de Sype. A single switch boost convertor with a high conversion ratio.
Proc. of the Appl. Power Electr. Conf., APEC 2005, pages pp. 1581{1587, March 2005.
[3] N. Mohan, T. Undeland, and W. Robbins. Power Electronics. Addison-Wesley, 2003.
[4] A. Van den Bossche. Cursus vermogenselektronica.
[5] A.P. Van den Bossche. Zvzc dc-dc converter for electrical bike using a 230v series motor.
Proc. of the 10th Eur. Conf. on Power Electr. and Applic., EPE 2003, September 2003.
[6] Microchip. PIC18FXX2 Data Sheet. Microchip, 2002.
[7] Analog Devices. Implementing PI controllers with the ADMC401. Analog Devices, Janu-
ary 2000.
[8] Analog Devices. Implementing Low-Pass Filters with the ADMC401. Analog Devices,
January 2000.
71

Lijst van �guren
2.1 Elektrische �ets met een serie motor . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Schematische voorstelling van de motor met de bekrachtigingswikkelingen in
parallel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 Principe schema van de convertor . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 Principe schema van de convertor . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Vermogengedeelte samen met het signaalgedeelte . . . . . . . . . . . . . . . . 15
3.4 De conversieverhouding van de beschouwde convertor als buck-boostconvertor
in functie van de pulswijdteverhouding � en de windingsverhouding n2=n1 . . 16
3.5 Opbouw van de transformator . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.6 Schema van het vermogengedeelte in Eagle . . . . . . . . . . . . . . . . . . . 18
3.7 Schematische voorstelling van de convertor met middenaftakking . . . . . . . 19
3.8 Schema van de beveiliging van het vermogengedeelte in Eagle . . . . . . . . . 20
3.9 Schema van het signaalgedeelte in Eagle . . . . . . . . . . . . . . . . . . . . . 22
3.10 Experimentele golfvormen van de convertor in continue mode: (van boven naar
beneden) de primaire stroom i1, de schakelspanning vs en het schakelsignaal . 23
3.11 Golfvormen van de beschouwde convertor in continue geleidingsmode. . . . . 24
3.12 Experimentele golfvormen van de convertor in onderbroken mode: (van boven
naar beneden) de primaire stroom i1, de schakelspanning vs en het schakelsignaal 25
3.13 Golfvormen van de beschouwde convertor in onderbroken geleidingsmode. . . 26
3.14 Het rendement van de beschouwde convertor in functie van het uitgaand ver-
mogen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1 Schematische voorstelling van het systeem . . . . . . . . . . . . . . . . . . . . 32
72
Lijst van �guren 73
4.2 Typische bode plot van een PI-regelaar . . . . . . . . . . . . . . . . . . . . . . 34
4.3 Illustratie van de Zero order hold (ZOH)-benadering . . . . . . . . . . . . . . 35
4.4 Typische bode plot van een eerste orde laagdoorlaat�lter . . . . . . . . . . . . 36
4.5 Illustratie van de First order hold (FOH)-benadering . . . . . . . . . . . . . . 37
4.6 Schematische voorstelling van de stroomregelkring . . . . . . . . . . . . . . . 39
4.7 De respons van de stroomregellus op een eenheidstap op tijdstip 0 . . . . . . 42
4.8 Het bode diagram van de open lus stroomregelkring . . . . . . . . . . . . . . 42
4.9 Schematische voorstelling van de spanningsregelkring . . . . . . . . . . . . . . 43
4.10 De respons van de spanningsregellus op een eenheidstap op tijdstip 0 . . . . . 44
4.11 Het bode diagram van de open lus spanningsregelkring . . . . . . . . . . . . . 45
4.12 Het stroomdiagramma van de Motorsturing . . . . . . . . . . . . . . . . . . . 47
5.1 Principe trapdetectie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2 Detectie van de richting van trappen . . . . . . . . . . . . . . . . . . . . . . . 51
5.3 Stroomdiagramma van de interrupt routine van de trapdetectie . . . . . . . . 53
5.4 Het stroomdiagramma van de subroutine \Menu X" van de interrupt routine
als �e�en van de drie knoppen bij het LCD-display wordt ingedrukt . . . . . . . 56
5.5 Het stroomdiagramma van de interrupt routine als �e�en van de drie knoppen
bij het LCD-display wordt ingedrukt . . . . . . . . . . . . . . . . . . . . . . . 57
5.6 Het stroomdiagramma van het volledige programma . . . . . . . . . . . . . . 61
A.1 Bovenkant van de vermogenprint . . . . . . . . . . . . . . . . . . . . . . . . . 65
A.2 Onderkant van de vermogenprint . . . . . . . . . . . . . . . . . . . . . . . . . 66
B.1 Bovenkant van de signaalprint . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B.2 Onderkant van de signaalprint . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
C.1 Bovenkant van de LCD-print . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
C.2 Onderkant van de LCD-print . . . . . . . . . . . . . . . . . . . . . . . . . . . 70


















