
Data Selection In Ad-Hoc Wireless Sensor Networks Olawoye Oyeyele 11/24/2003.
27
Data Selection In Ad- Hoc Wireless Sensor Networks Olawoye Oyeyele 11/24/2003
-
Upload
louise-nash -
Category
Documents
-
view
215 -
download
1
Transcript of Data Selection In Ad-Hoc Wireless Sensor Networks Olawoye Oyeyele 11/24/2003.
Data Selection In Ad-Hoc Wireless Sensor Networks
Olawoye Oyeyele
11/24/2003
Outline
Objectives Data Selection Problem Randomization Spatial Selection Discussions

Objectives
Outline the salient aspects of the Randomization algorithm [1]
Indicate important parameters in the analysis of data selection
Discuss properties of Randomization and highlight improvements possible with spatial selection
Present further results in spatial selection

Sensor Selection Problem
Densely deployed wireless sensor networks consume energy through communications
Multiple communications may lead to insufficient bandwidth
Computational burden of processing all available data may be prohibitive.
Not all measured data necessarily required for detection Subset of data may provide acceptable detection
Notation
For N network nodes, each indexed by i , data available in a single time slot m is denoted by
The decision to select a measurement depends on the outcome of an indicator variable
Select K out of N sensors.
1
2
[ ]
[ ]
.[ ]
.
.
[ ]N
x m
x m
x m
x m
[ ]ax m
[ ]ag m
Notation
Each measurement in the current time slot is selected with probability i.e. has the probability mass function
This rule reduces the expected complexity of the detector by a factor of .
is chosen to be a small value.
[ ]
, 1
(1 ), 0a
g
g mg
gp g
g
g
g
g
Notation
The randomly selected vector can be represented by the equation
G[m] is a diagonal matrix where the i-th entry on the leading diagonal determines whether or not a data element in x[m] is selected
Since the detector receives only a portion of the data, the algorithms are based on the conditional density for given G[m] = G denoted by
[ ] [ ] [ ]g m m mx G x
| ( )gx
p G x | G
[ ]g mx
[ ]g mx
Application to Distributed Signal Processing
Random selection with a small value of can lead to acceptable detector performance
Energy dissipated by communication may also be limited Avoids computational and communicational overhead
that may be incurred from more complicated iteration procedures or centralized coordination
Compatible with ad-hoc networking, clustered or unclustered networks
g
Randomized Selection in Detection
For a binary hypothesis test for signals in additive gaussian noise,
The canonical detector for a binary hypothesis test is the likelihood ratio test given by
is a fixed threshold. If L(x) is greater than , then otherwise
0
1
: [ ] [ ]
: [ ] [ ] + [ ]
H m m
H m m m
x n
x s n
( ) L
x
1H H
0H H
Randomized Selection in Detection
A signal with probability density function such that
can be defined as an even signal e.g. a sinusoid with unknown uniformly distributed phase, a zero-mean gaussian random vector
Since the detector has access to the random variables in G[m] and processes the data in the likelihood ratio under randomized data selection is given as
The simplification is because the random variables are independent of the hypotheses Hi
( ) ( )s o s op s p s
, | 1
, |
| , 1 | 1
| , 0 | 0
( , | )( , )
( , | )
( | , ) ( | ) =
( | , ) ( | )
= ( | )
g
g
g
g
g
gg o
g
g
g
p HL
p H
p H p H
p H p H
L
X G H
X G H
X G H G H
X G H G H
x Gx G
x G
x G G
x G G
x G
[ ]g mx

Randomized Selection in Detection
Likelihood ratio compared to a fixed threshold is optimal under the Neyman-Pearson criterion
Two problems: Determining the threshold can be computationally complex –
requires inversion of:
Requires 2N terms for N samples of data and approximations can be troublesome
G fluctuates although threshold is constant Solution is to fix false alarm rate for each G (Constant False Alarm
Rate detection).
| 0 0( ) ( | ) Pr( ( ) | , )F H gP p H L H GG
G x G
Parameters used in Detection
Likelihood Ratio Test Useful for discriminating between different hypothesis
Receiver Operating Characteristics Depicts the performance of an algorithm with respect to the
assumed models of signals sensed.
Signal Detection and Operating Characteristics
Given two distributions, with different mean and variance such that they overlap
A classifier(detector) threshold can be defined as x*, where x represents possible values of a sensed random variable.
a hit – sensed signal is above x* a false alarm – sensed signal above x* but it
is noise a miss – sensed signal is below x* and it is
target signature a correct rejection – signal below x* and
target not present.
2( * | )P x x x
1( * | )P x x x
2( * | )P x x x
1( * | )P x x x

Signal Detection and Operating Characteristics
is the discriminability || 10'
d
*x0 1
A hit
False AlarmA miss
Correct rejection

Consider data set vi generated by sampling a sinusoid; under a binary hypothesis test
ni is a Gaussian random variable with zero mean and variance . Given that , probability density is
where u() denotes the unit step function, K is number of selected data
Example – Detecting a Sinusoidal Signal
0
1
: =
: = Acos(2 )
i i
ii i
H x n
vH x n
| 2 21
( | |)( | )
Ki
Ki i
u A cp K
A c
c c
2)2cos(][
i
i
vAmc
Example – Detecting a Sinusoidal Signal
For a selected subset K, the notation becomes
Probability density under H1 can be obtained by convolving PDF of the two terms in the summation
Since xK[m] under Ho is Gaussian, the Likelihood ratio is
K
i iHx
K
i i
ax
i
i
KKKKHKx
Hxp
daeaA
aAu
KpKpHKp
ii
K
1 1|
1
)2
)((
22
||1,|
)|(
2
1|)|(
)|(*)|(),|(
2
2
1
xxx nC
][][][:
][][:
1
0
mmmH
mmH
K
K
ncx
nx
K
i i
aax
i
iK daee
aA
aAuKL
iii
1
)2
())(
(
22
2
2
2
2
|)|()|(
x
Example – Detecting a Sinusoidal Signal
Thus the Likelihood ratio is of the form
Plot of the log of likelihood shows that it is symmetric and increasing thus the LRT simplifies to a threshold test of the form
K
i ixL1).(
tx
HH
HH
0
1
||

Example – Detecting a Sinusoidal Signal
Plot of Log Likelihoods for different A: shows symmetry and monotonicity

Example – Detecting a Sinusoidal Signal - Performance
The ROC can be determined by integrating the conditional densities over the decision region for
ROC calculated from the LRT gives the maximum achievable PD for each false alarm rate
1ˆ HH
t0
),|( 1,| HKpP KHKD Kxx
),|( 0,| HKpP KHKF Kxx
10 FP
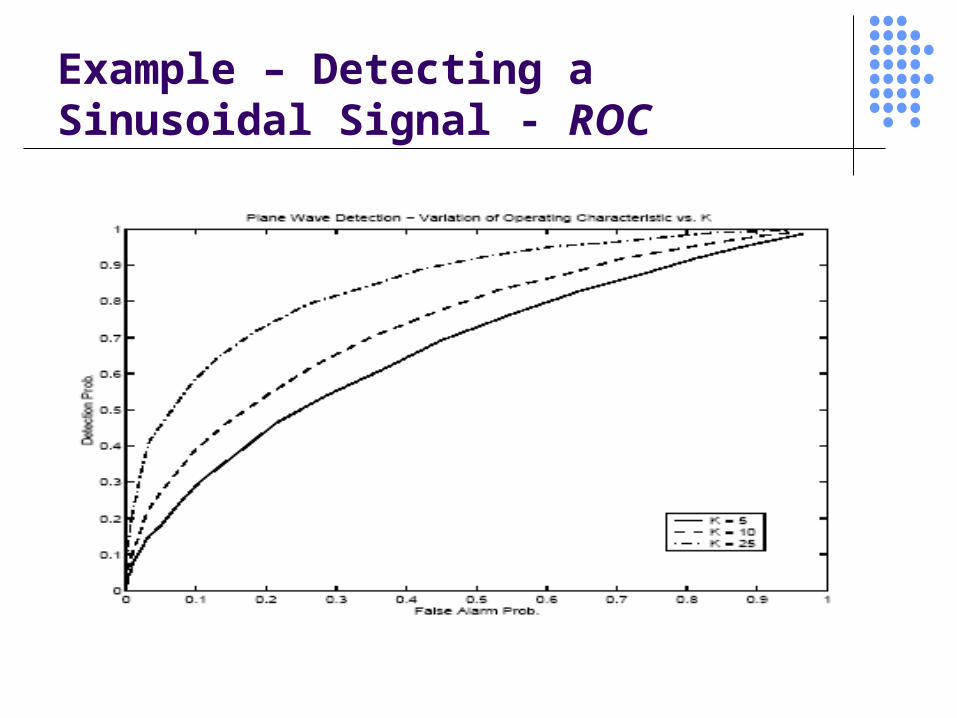
Example – Detecting a Sinusoidal Signal - ROC

Spatial Selection
Variograms Use of Transect
Estimate Variogram along straight line drawn through a region Such an estimate may exhibit directionality except if
underlying process is isotropic

Spatial Selection
Location of target May allow variable amount of data to be used in estimate
2D May lead different variogram estimates Different data arrangements possible

Spatial Selection
Natural Estimator
where
And is the number of distinct pairs in Robust Estimator
Robust to contamination by outliers [2]
2
( )
12 ( ) ( ( ) ( )) ,
| ( ) |d
i jN
Z ZN
h
h s s hh
( ) ( , ) : ; , 1,...,i j i jN i j n h s s s s h
| ( ) |N h ( )N h
4
1/ 2
( )
1| ( ) ( ) |
| ( ) |2 ( )
(0.457 0.494 / | ( ))
i jN h
Z s Z sN h
hN h
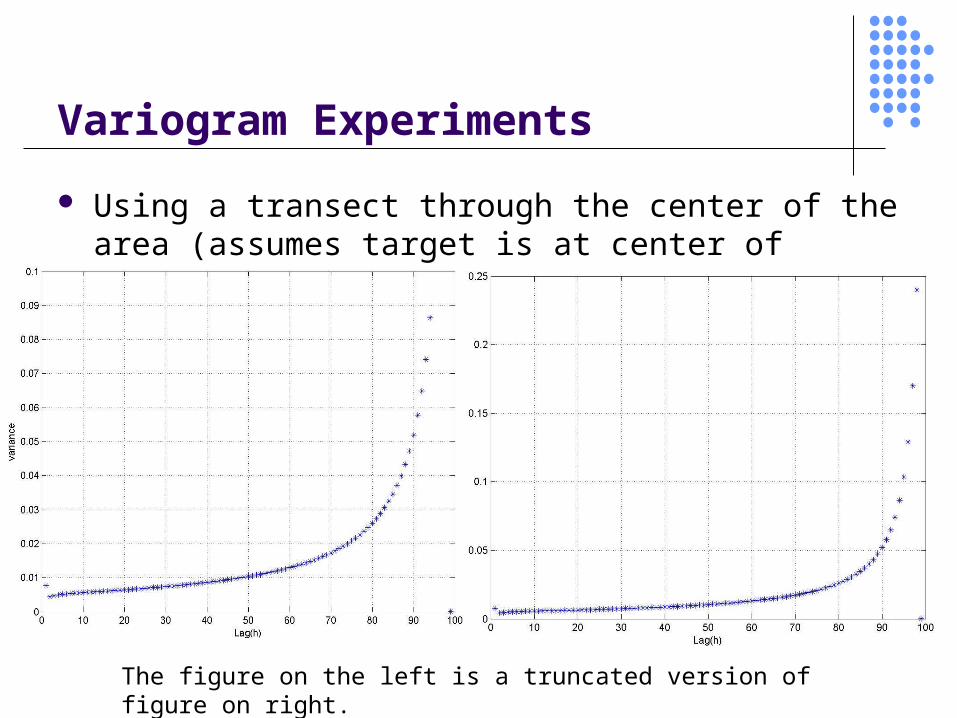
Variogram Experiments
Using a transect through the center of the area (assumes target is at center of sensor area)
The figure on the left is a truncated version of figure on right.
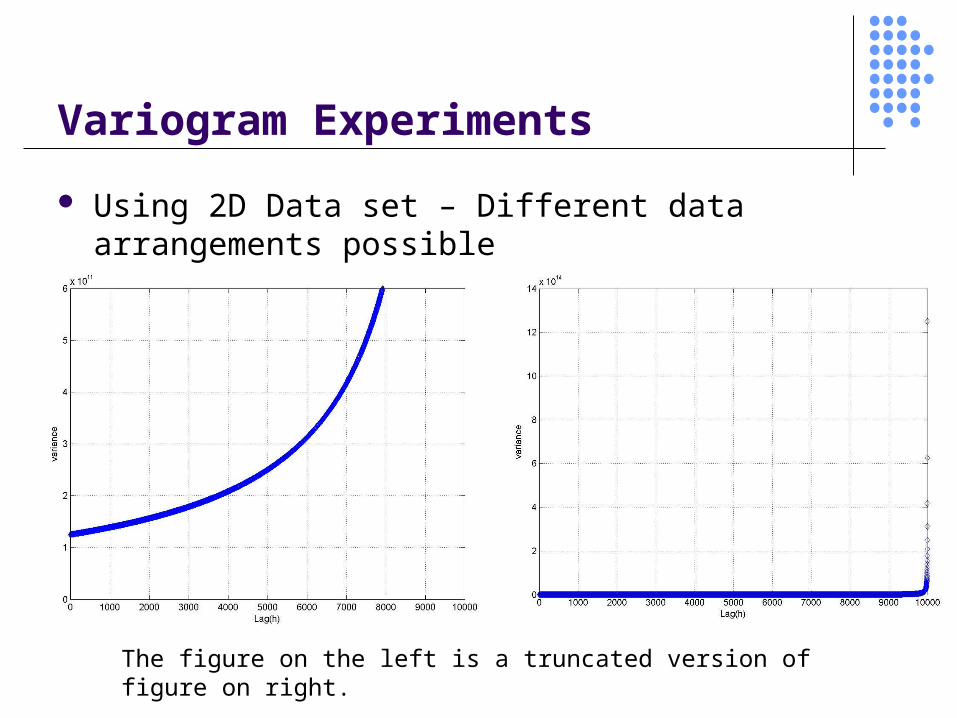
Variogram Experiments
Using 2D Data set – Different data arrangements possible
The figure on the left is a truncated version of figure on right.
Discussions/Comparisons(Randomization)
High dependence on base station/manager node All nodes are active all the time Data may arrive in out-of-order fashion at the base
station Random selection may result in biased selection hence a
one-sided view of phenomenon In multihop routing some of the selected data may be
lost Potential for simple and practical implementation May consume surprising amount of energy (short
network lifetime) Does not collect network state

References
Charles K. Sestok, Maya R. Said, Alan V. Oppenheim, Randomized Data Selection in Detection with applications to distributed Signal Processing, IEEE Proceedings, Nov. 2003.
Cressie Noel A. C., Statistics for Spatial Data, Wiley 1991


















